Результат интеллектуальной деятельности: СПОСОБ ЗАДАНИЯ СИЛЫ НАЖАТИЯ ПЕДАЛИ АКСЕЛЕРАТОРА ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ СИЛОЙ НАЖАТИЯ ПЕДАЛИ АКСЕЛЕРАТОРА
Вид РИД
Изобретение
Область техники
Данное изобретение относится к способу задания силы нажатия педали акселератора для устройства управления силой нажатия педали акселератора.
Уровень техники
В Патентном Документе 1 раскрыта область техники, которая применяется к двигателю, выполненному с возможностью переключения первого способа приведения в действие (например, гомогенное сгорание) на стороне с высокой частотой вращения и высокой нагрузкой и второго способа приведения в действие (например, сгорание послойного заряда топлива) на стороне с низкой частотой вращения и низкой нагрузкой, на которой эффективность экономии топлива выше эффективности экономии топлива первого способа приведения в действие, и который может сразу увеличивать силу реакции при нажатии (силу нажатия) педали акселератора, когда область приведения в действие двигателя переходит в граничную область приведения в действие непосредственно перед переключением на первую область приведения в действие, когда область приведения в действие двигателя переключается со второй области приведения в действие, в которой выполняется второй способ приведения в действие, на первую область приведения в действие, в которой выполняется первый способ приведения в действие. Эта величина увеличения силы нажатия подавляется, когда область приведения в действие двигателя возвращается из граничной области приведения в действие во вторую область приведения в действие.
Техническое решение согласно Патентному Документу 1 может увеличивать силу нажатия педали акселератора и отпускать эту величину увеличения посредством использования в качестве границы вышеописанной граничной области приведения в действие для снижения уровня расхода топлива. Тем не менее, педаль акселератора является основным рабочим элементом для управления транспортным средством в соответствии с намерением водителя. Ощущение при выполнении действий, которое испытывает водитель, и влияние ощущения при выполнении действий на общую характеристику управляемости транспортного средства очень важно учитывать при оценке качества всего транспортного средства. При практическом применении устройства управления силой нажатия, способствующего такому снижению экономии топлива, необходимо балансировать снижение экономии топлива и удобство использования педали акселератора или удобство использования транспортного средства в значительной степени.
Например, в случае конструкции устройства управления силой нажатия, в которой сила нажатия педали акселератора может варьироваться посредством приведения в действие актуатора, следует понимать, что управление выполняется таким образом, что значение команды управления приведением в действие для этого актуатора задается так, что оно еще увеличивается относительно целевого значения и возвращается к целевому значению, так что водитель испытывает внезапное увеличение силы нажатия, которое выполняется, когда область приведения в действие переходит из второй области приведения в действие в граничную область приведения в действие, когда водитель нажимает педаль акселератора, для повышения чувствительности к увеличению силы нажатия.
Тем не менее, в случае, если управление выполняется таким образом, что значение команды управления приведением в действие для актуатора задается так, что оно еще увеличивается относительно целевого значения и возвращается к целевому значению, если регулируемая переменная значения команды управления приведением в действие относительно целевого значения не задается надлежащим образом, сила нажатия педали акселератора становится чрезмерно большой. Следовательно, имеется проблема того, что снижается удобство использования педали акселератора.
Патентные документы
Патентный Документ 1: публикация заявки на патент Японии № 2003-120339.
Сущность изобретения
В настоящем изобретении способ задания силы нажатия педали акселератора для устройства управления силой нажатия педали акселератора, выполняющего управление перерегулированием так, чтобы еще увеличивать команду управления увеличением силы нажатия относительно целевого значения команды управления увеличением силы нажатия, которое увеличивает силу нажатия педали акселератора относительно базовой силы нажатия, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия, и затем возвращаться к целевому значению команды управления увеличением силы нажатия, причем способ задания силы нажатия педали акселератора включает этап задания регулируемой переменной перерегулирования для управления перерегулированием на основе гистерезиса, если базовая сила нажатия педали акселератора имеет гистерезис, который имеет различные значения в направлении увеличения степени открытия и в направлении уменьшения степени открытия для степени открытия акселератора.
В настоящем изобретении, регулируемая переменная перерегулирования задается на основе абсолютной величины гистерезиса базовой силы нажатия педали акселератора. Соответственно, можно надлежащим образом задавать регулируемую переменную перерегулирования, чтобы повышать чувствительность к увеличению силы нажатия, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия, и предотвращать снижение удобства использования педали акселератора.
Краткое описание чертежей
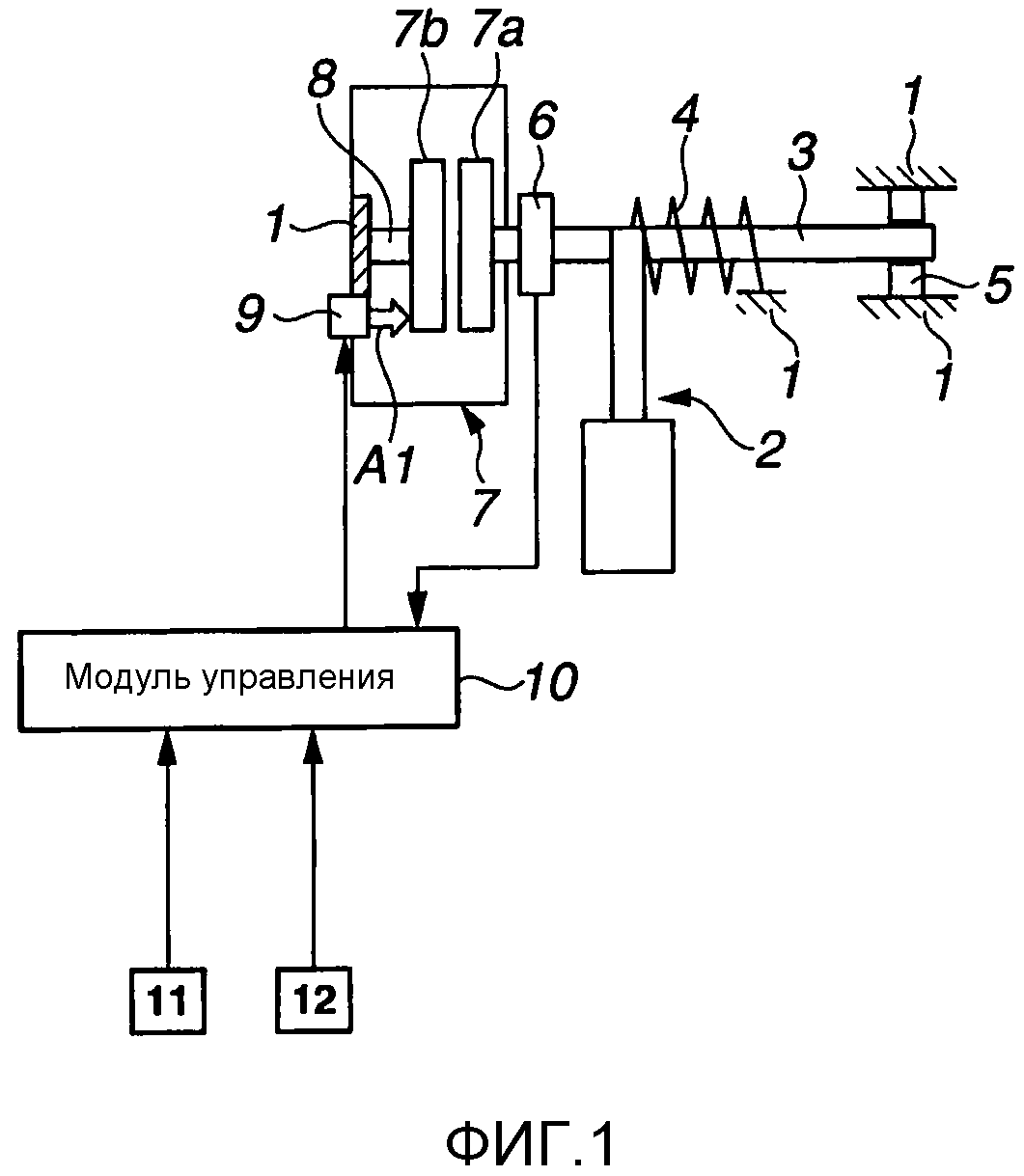
Фиг. 1 является пояснительным видом, схематично показывающим конфигурацию системы для устройства управления силой нажатия педали акселератора согласно настоящему изобретению и схематичную конфигурацию механизма варьирования силы нажатия.
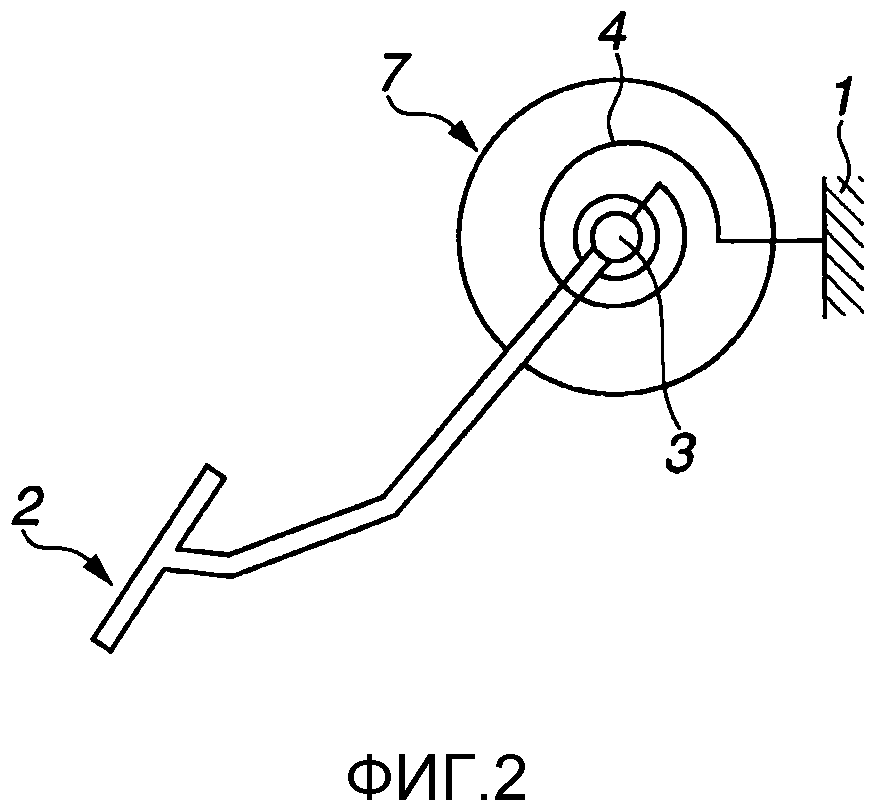
Фиг. 2 является пояснительным видом, схематично показывающим механизм варьирования силы нажатия согласно одному варианту осуществления настоящего изобретения.
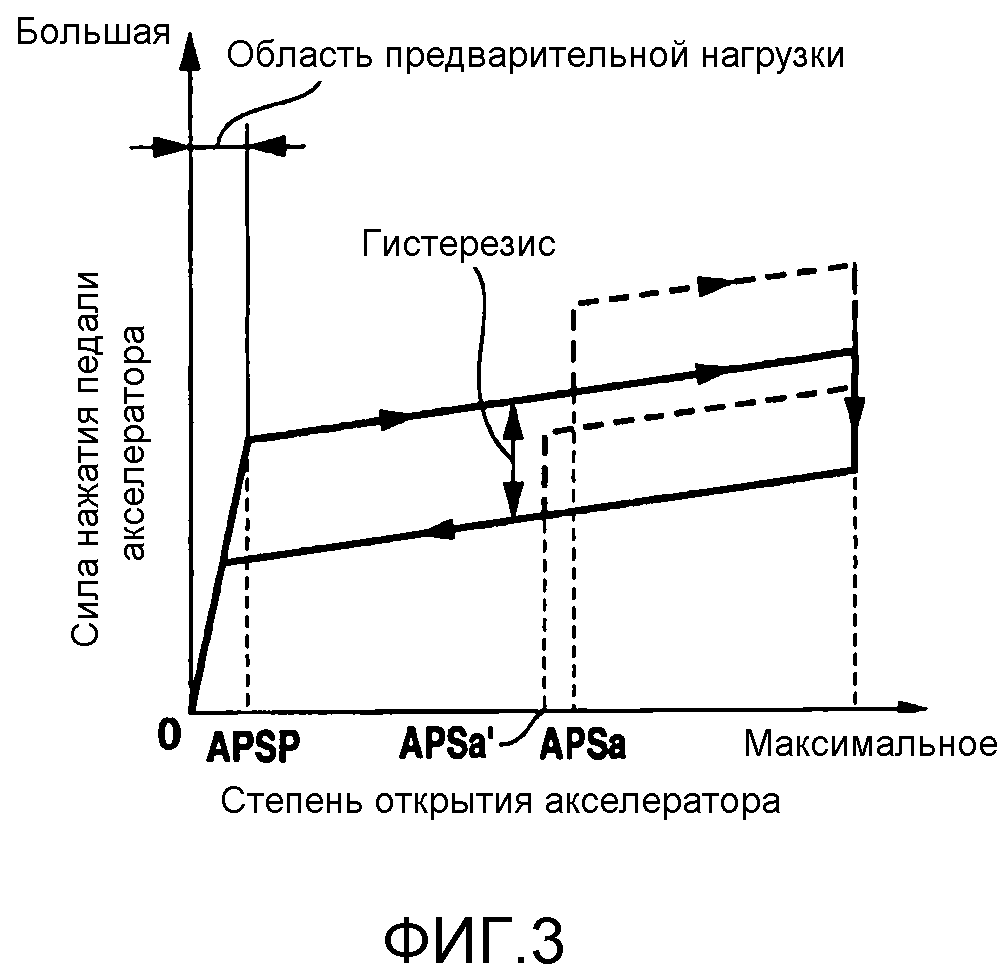
Фиг. 3 является характерным видом, показывающим пример характеристики силы нажатия педали акселератора в настоящем изобретении.
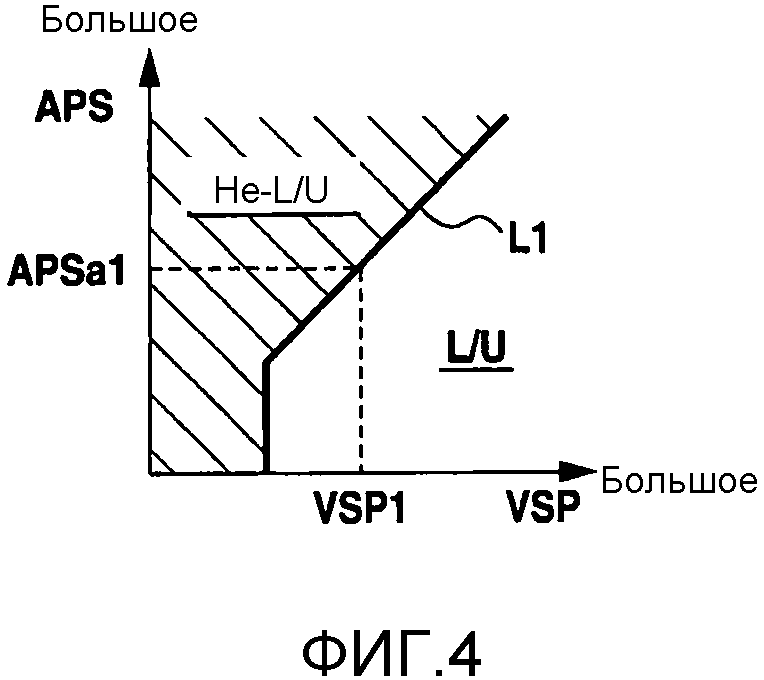
Фиг. 4 является пояснительным видом, показывающим один пример корреляции между пороговым значением степени открытия акселератора и областью блокировки блокировочной муфты.
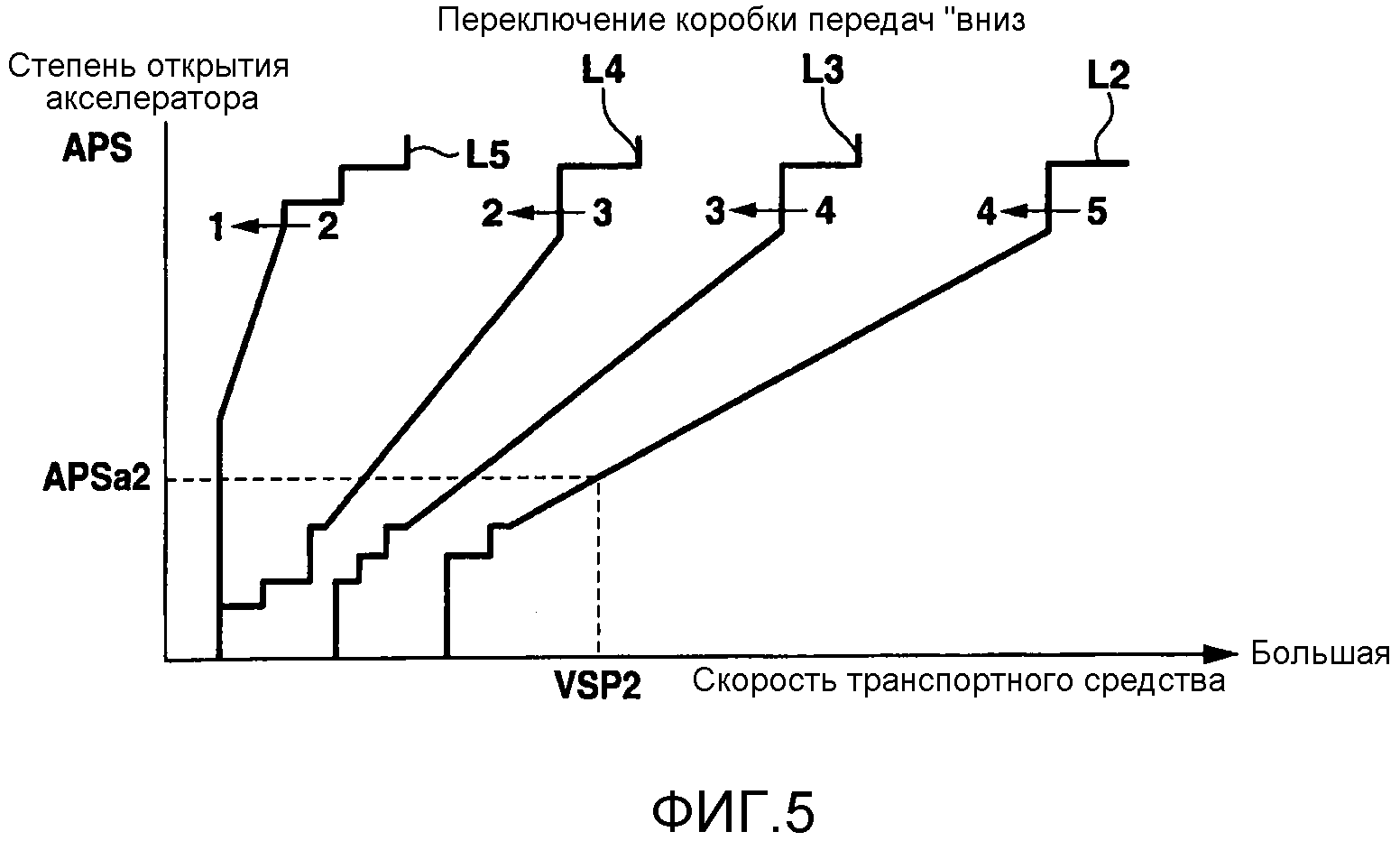
Фиг. 5 является пояснительным видом, показывающим один пример корреляции между пороговым значением степени открытия акселератора и линией переключения передач автоматической трансмиссии.
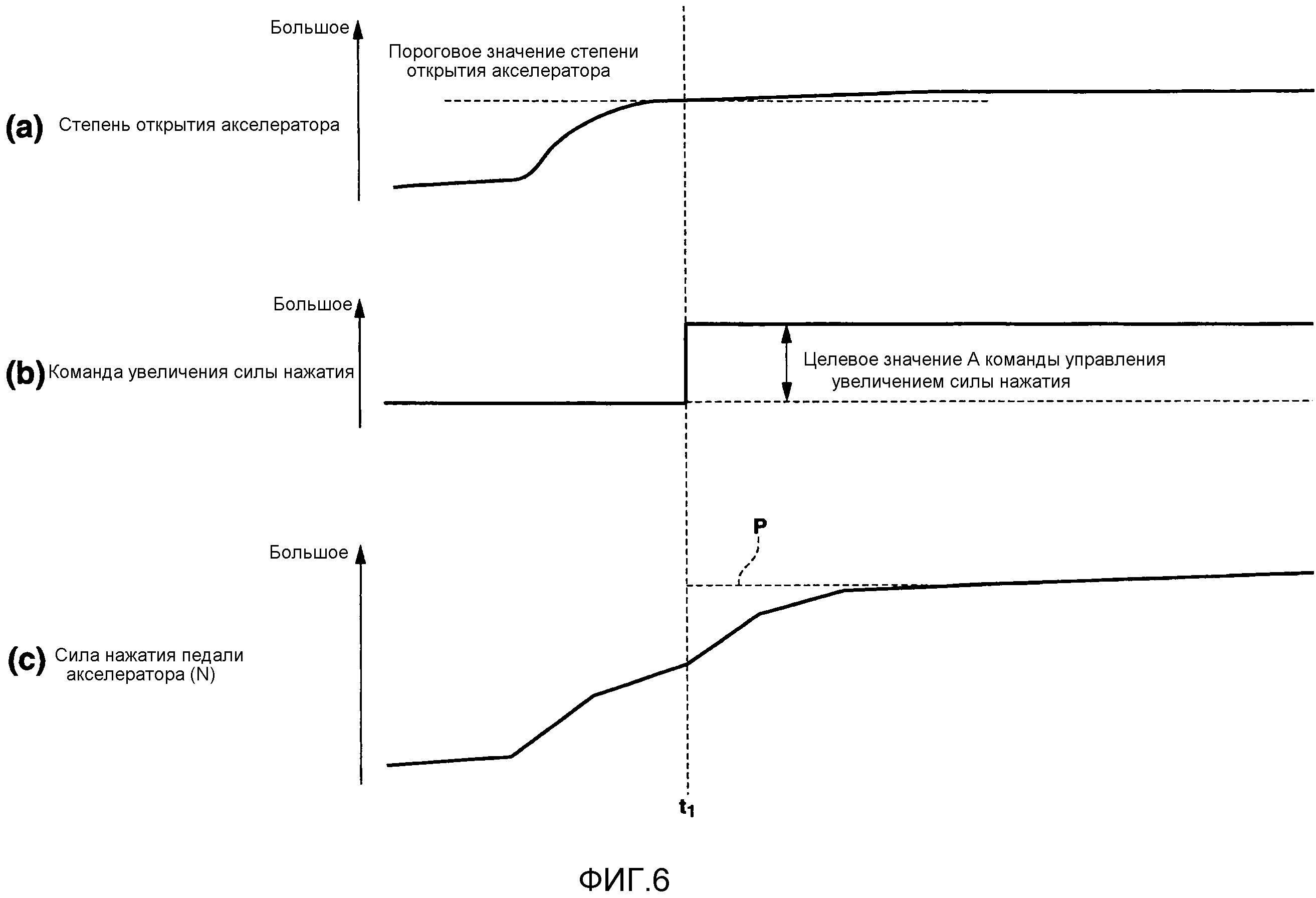
Фиг. 6 показывает временную диаграмму, демонстрирующую варьирования различных параметров, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия в сравнительном примере; при этом Фиг. 6(a) показывает варьирование степени открытия акселератора, Фиг. 6(b) показывает варьирование команды управления силой нажатия, а Фиг. 6(c) показывает варьирование силы нажатия педали акселератора.
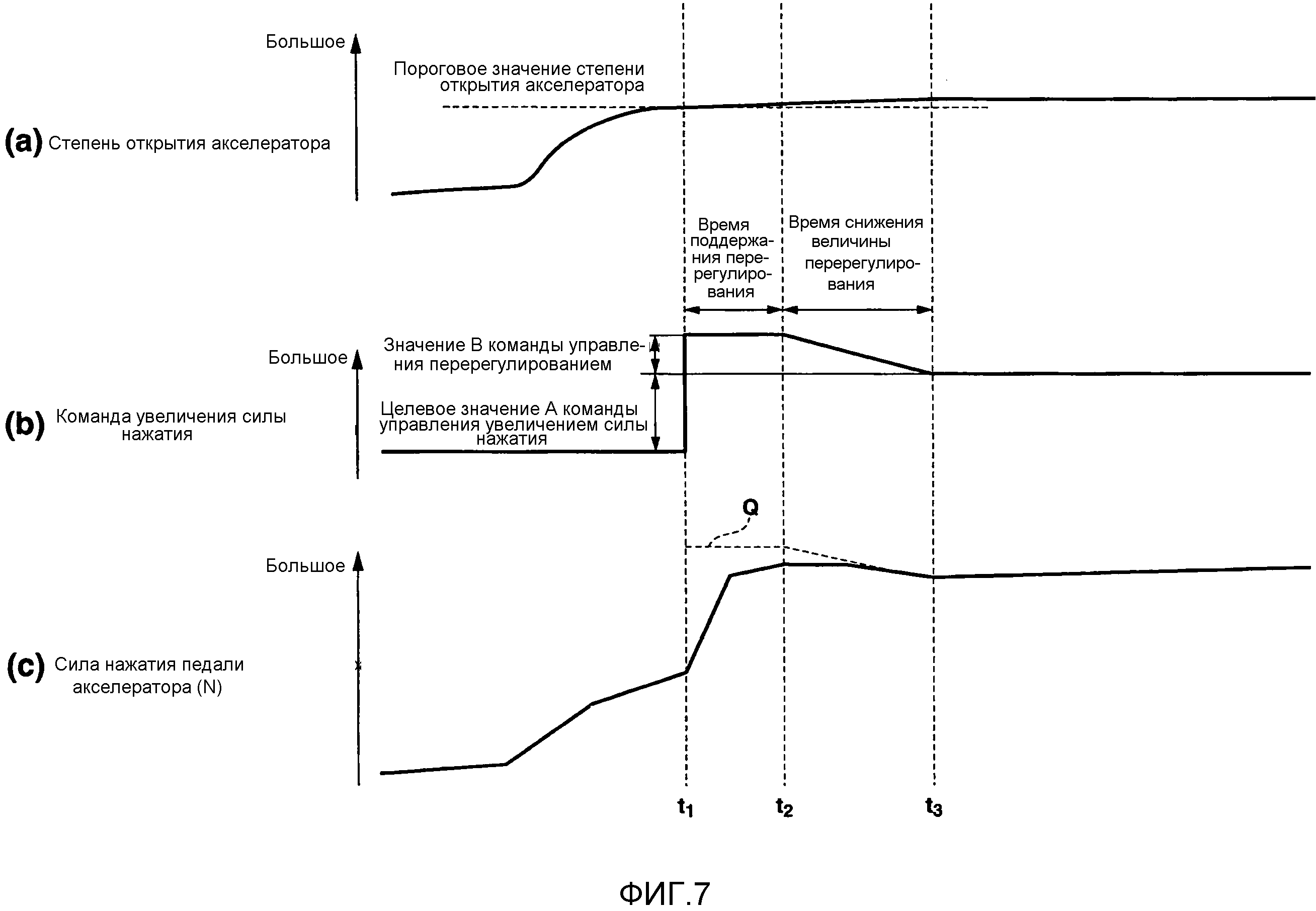
Фиг. 7 показывает временную диаграмму, демонстрирующую варьирования различных параметров, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия в одном варианте осуществления настоящего изобретения, при этом Фиг. 7(a) показывает варьирование степени открытия акселератора, Фиг. 7(b) показывает варьирование команды управления увеличением силы нажатия, а Фиг. 7(c) показывает варьирование силы нажатия педали акселератора.
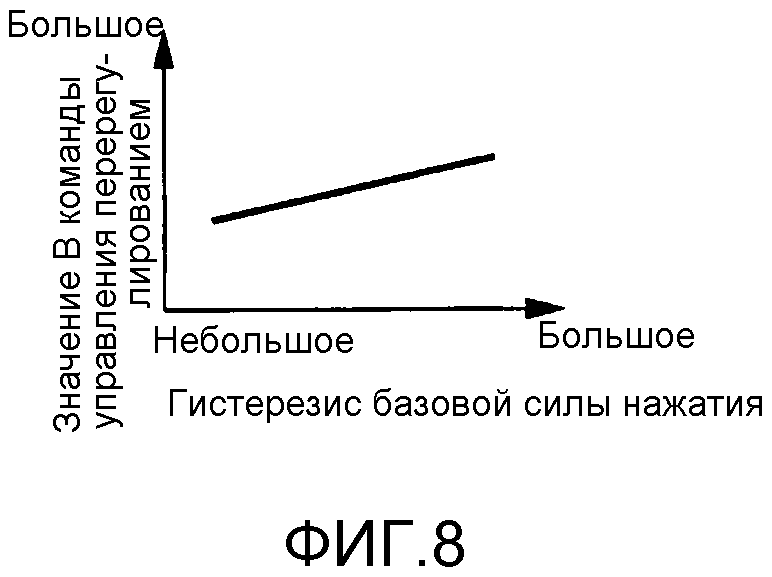
Фиг. 8 является характерным видом, схематично показывающим корреляцию между значением B команды управления перерегулированием и гистерезисом.
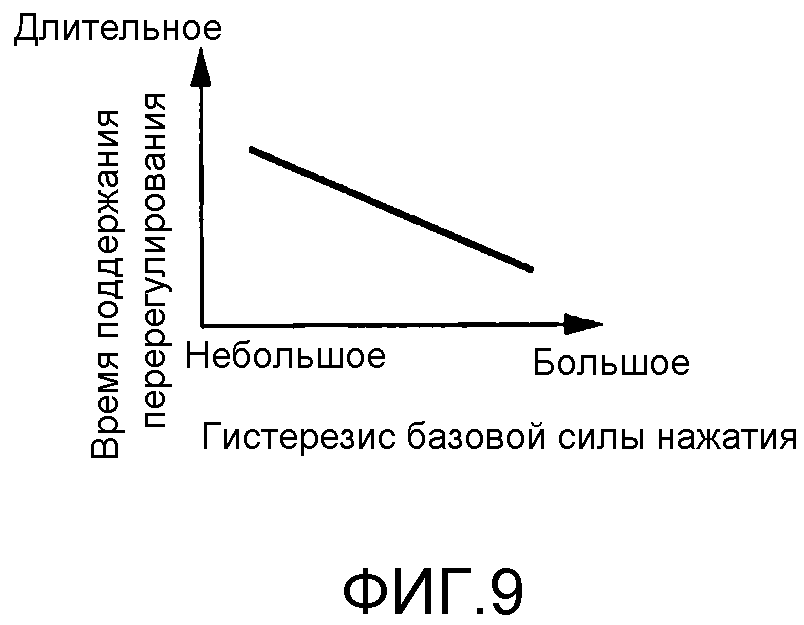
Фиг. 9 является характерным видом, схематично показывающим корреляцию между временем поддержания перерегулирования и гистерезисом базовой силы нажатия.
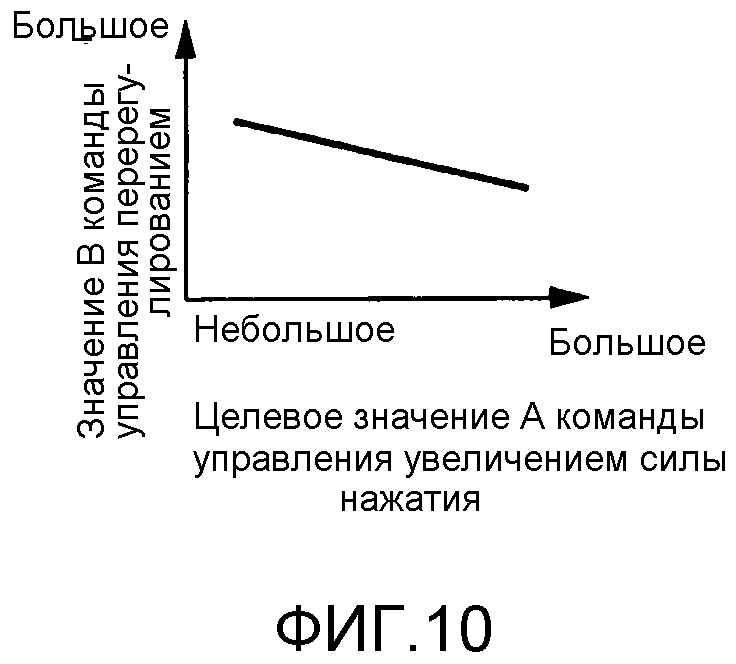
Фиг. 10 является характерным видом, схематично показывающим корреляцию между значением B команды управления перерегулированием и целевым значением А команды управления увеличением силы нажатия.
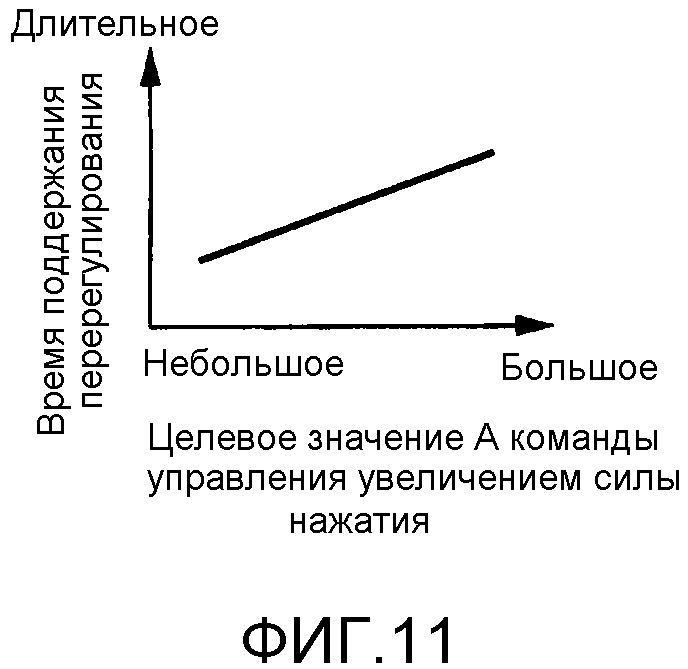
Фиг. 11 является характерным видом, схематично показывающим корреляцию между временем поддержания перерегулирования и целевым значением А команды управления увеличением силы нажатия.
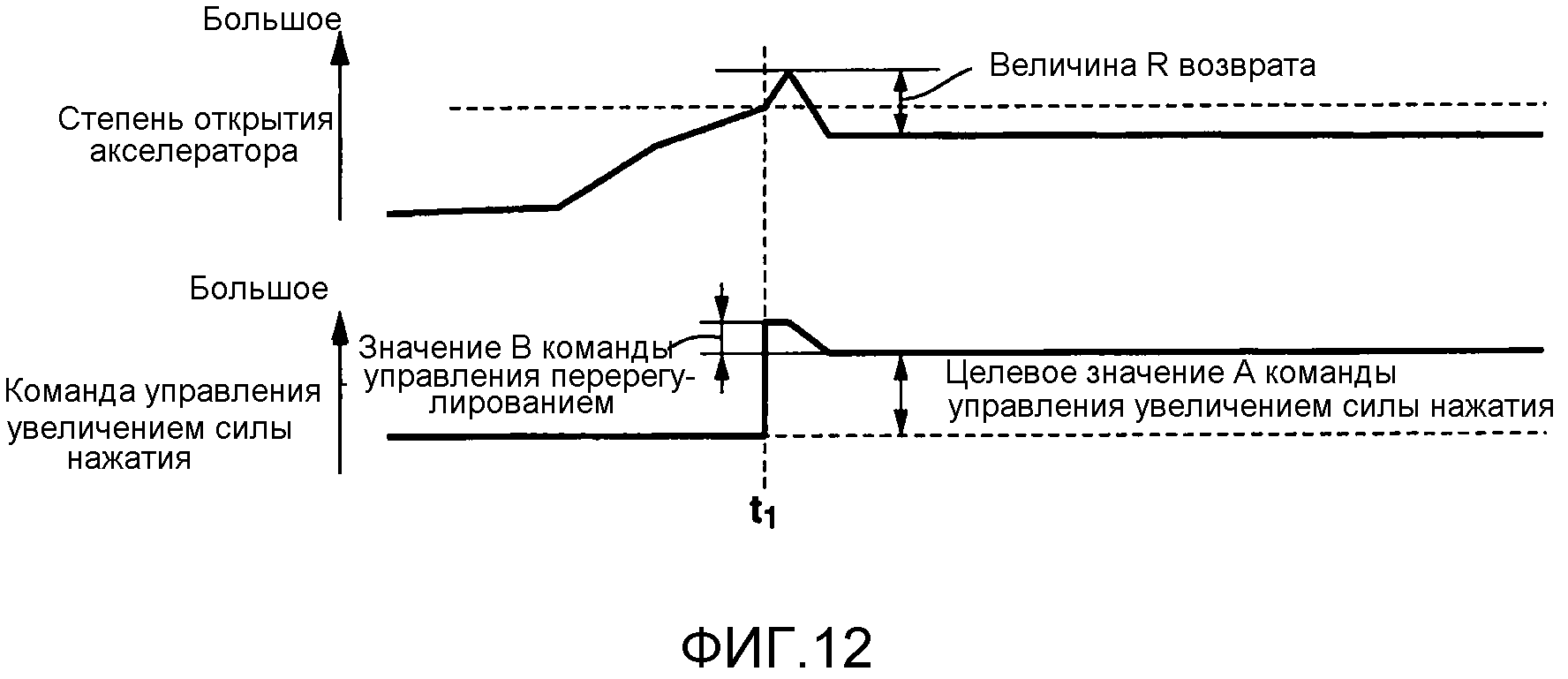
Фиг. 12 является временной диаграммой, показывающей величину R возврата степени открытия акселератора при управлении перерегулированием, степень открытия акселератора и команду управления увеличением силы нажатия, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия в одном варианте осуществления настоящего изобретения.
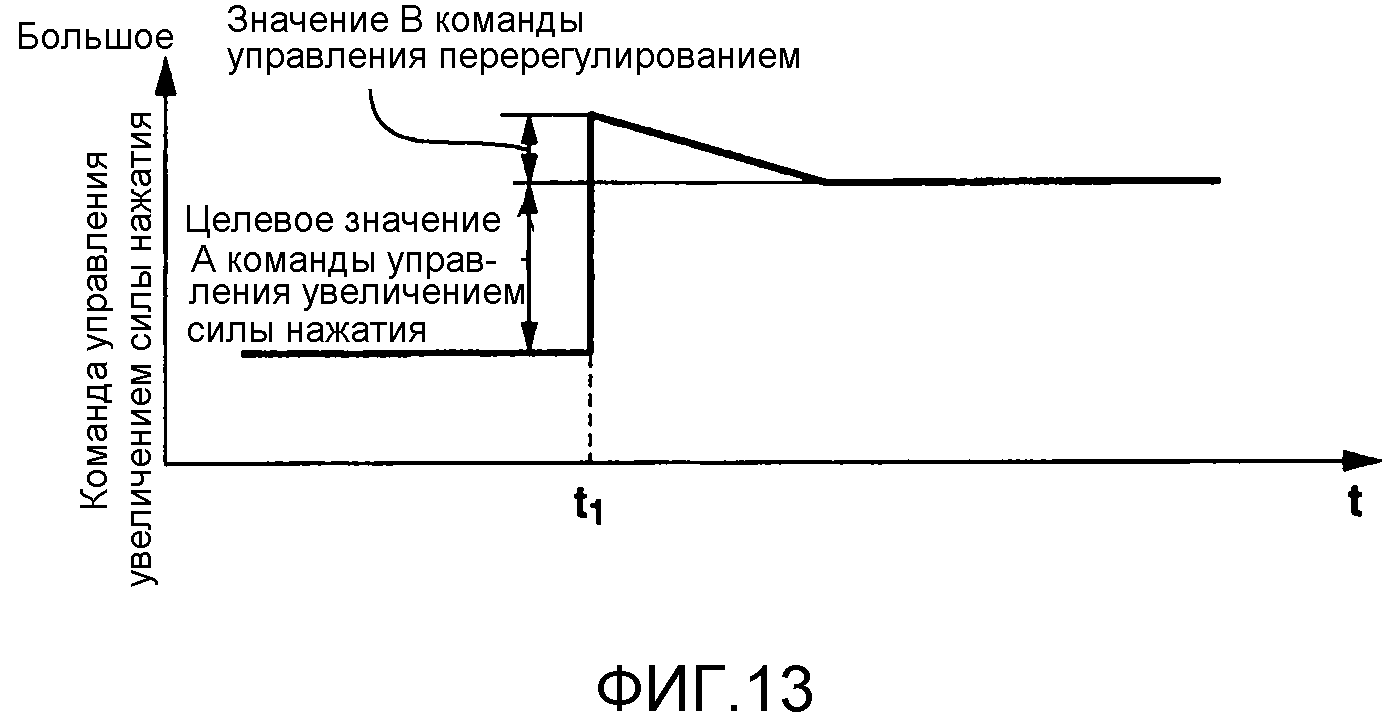
Фиг. 13 является временной диаграммой, показывающей варьирование команды управления увеличением силы нажатия, когда сила нажатия педали акселератора увеличивается относительно базовой силы нажатия в другом варианте осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Далее со ссылкой на чертежи подробно иллюстрируется один вариант осуществления настоящего изобретения.
Устройство управления силой нажатия педали акселератора, по существу, выполнено с возможностью регулируемого управления силой нажатия (рабочей силой реакции) педали 2 акселератора, предоставляемой для кузова 1 транспортного средства (не показано). Как описано ниже, устройство управления силой нажатия педали акселератора включает в себя средство, определяющее степень открытия (величину нажатия) педали 2 акселератора, предоставляемую для транспортного средства, и средство, варьирующее силу нажатия педали 2 акселератора относительно базовой силы нажатия. Устройство управления силой нажатия педали акселератора может увеличивать силу нажатия педали 2 акселератора относительно (за рамки) базовой силы нажатия в области, в которой степень открытия педали 2 акселератора превышает заданное пороговое значение степени открытия педали акселератора.
Как показано на фиг. 1 и 2, педаль 2 акселератора обеспечивается на вращательном валу 3. Педаль 2 акселератора может поворачиваться вокруг вращательного вала 3. Педаль 2 акселератора принимает силу реакции в направлении закрытия акселератора посредством возвратной пружины 4, которая может иметь различные формы и которая имеет один конец, прикрепленный к кузову 1 транспортного средства, и другой конец, прикрепленный к вращательному валу 3. Кроме того, один конец вращательного вала 3 поддерживается с возможностью вращения посредством кузова 1 транспортного средства через подшипник 5. С другой стороны, датчик 6 положения акселератора, служащий в качестве средства определения степени открытия акселератора, обеспечивается около другого конца вращательного вала 3.
В этом варианте осуществления, величина нажатия педали 2 акселератора (степень открытия акселератора) и степень открытия дроссельного клапана (не показан) двигателя внутреннего сгорания (не показан) координируются между собой. Степень открытия дроссельного клапана двигателя внутреннего сгорания увеличивается в соответствии с величиной нажатия педали 2 акселератора. Другими словами, величина впрыска топлива (и затем величина расхода топлива) увеличивается в соответствии со степенью открытия акселератора.
Механизм варьирования силы нажатия состоит из регулируемого фрикционного диска 7, включающего в себя пару фрикционных элементов 7a и 7b, которые противостоят друг другу и которые могут обеспечивать силу трения для вращения вращательного вала 33. Один фрикционный элемент 7a механически соединяется с концевым участком вращательного вала 3. Другой фрикционный элемент 7b поддерживается через шлицы и т.д. на крепежном валу 8 так, что он перемещается в осевом направлении, и так, что он не вращается. Крепежный вал 8 крепится и поддерживается посредством кузова 1 транспортного средства. Кроме того, актуатор 9 (например, электромагнитный соленоид), поджимающий фрикционный элемент 37b к фрикционному элементу 7b, крепится к кузову 1 транспортного средства.
Регулируемый фрикционный диск 7 перемещает фрикционный элемент 7b в осевом направлении (в направлении стрелки A1 на фиг. 1) посредством приведения в действие актуатора 9. Вследствие этого, регулируемый фрикционный диск 7 регулируемо управляет силой трения между фрикционным элементом 7a и фрикционным элементом 7b. Это приведение в действие актуатора 9 управляется посредством модуля 10 управления. Соответственно, можно варьировать силу трения, приложенную к вращательному валу 3, и затем силу нажатия при нажатии педали 2 акселератора посредством управления приведением в действие актуатора 9 посредством модуля 10 управления.
Модуль 10 управления принимает сигналы от различных датчиков, таких как упомянутый датчик 6 положения акселератора, определяющий степень открытия педали 2 акселератора, датчик 11 частоты вращения двигателя, определяющий частоту Ne вращения двигателя, и датчик 12 скорости транспортного средства, определяющий скорость VSP транспортного средства.
Фиг. 3 схематично показывает характеристику силы нажатия педали акселератора в вышеописанном варианте осуществления. Базисная сила нажатия, т.е. базовая сила нажатия увеличивается так, что она является практически пропорциональной степени открытия акселератора при наличии надлежащего гистерезиса в направлении увеличения степени открытия и в направлении уменьшения степени открытия. Кроме того, начальная область (область предварительной нагрузки), в которой базовая сила нажатия внезапно увеличивается, задается в области небольшой степени открытия акселератора. Кроме того, гистерезис базовой силы нажатия педали 2 акселератора задается равным практически постоянному значению независимо от абсолютной величины степени открытия акселератора.
Как подробно поясняется ниже, базовая сила нажатия пропорционально увеличивается в направлении увеличения степени открытия акселератора от заданной мгновенной степени открытия (степени APSP открытия акселератора) до максимальной степени открытия (степени MAX открытия акселератора). Начальная область, в которой степень открытия акселератора составляет от нуля до мгновенной степени открытия, является областью предварительной нагрузки, в которой базовая сила нажатия увеличивается с относительно большой скоростью в соответствии с увеличением степени открытия акселератора.
Когда степень открытия акселератора превышает заданное пороговое значение степени открытия акселератора (APSa) при работе в направлении увеличения степени открытия, т.е. при нажатии, сила нажатия педали акселератора увеличивается относительно базовой силы нажатия ступенчатым способом, как показано посредством пунктирной линии.
В этом случае пороговое значение степени открытия акселератора (APSa) является значением касательно уровня расхода топлива (степени открытия акселератора, при которой состояние вождения переключается из состояния вождения, в котором уровень расхода топлива является низким, в состояние вождения, в котором уровень расхода топлива является высоким). Пороговое значение степени открытия акселератора задается посредством модуля 10 управления на основе состояния вождения транспортного средства или двигателя. Таким образом, дополнительное нажатие педали 2 акселератора водителем естественно подавляется посредством увеличения силы нажатия педали акселератора ступенчатым способом. Одновременно можно, безусловно, сообщать водителю относительно перехода из состояния вождения, в котором уровень расхода топлива является низким (т.е. экономия топлива хорошая), в состояние вождения, в котором уровень расхода топлива является высоким (т.е. экономия топлива плохая).
Модуль 10 управления задает вышеописанное пороговое значение степени открытия акселератора (APSa) и задает заданное пороговое значение подавления величины увеличения (APSa') в качестве условия подавления увеличения силы нажатия (условия для подавления увеличения силы нажатия). Когда степень открытия акселератора становится больше порогового значения степени открытия акселератора (APSa), модуль 10 управления суммирует заданную величину увеличения силы нажатия с базовой силой нажатия педали 2 акселератора. Кроме того, когда степень открытия акселератора становится равной или меньшей вышеописанного порогового значения подавления величины увеличения (APSa') в состоянии, в котором заданная величина увеличения силы нажатия суммируется, считается, что условие подавления увеличения силы нажатия удовлетворяется, и модуль 10 управления исключает заданную величину увеличения силы нажатия, которая суммируется с базовой силой нажатия педали 2 акселератора.
В этом случае пороговое значение подавления величины увеличения (APSa') задается как степень открытия акселератора, меньшая порогового значения степени открытия акселератора (APSa) в идентичном состоянии вождения транспортного средства или двигателя. Например, пороговое значение подавления величины увеличения (APSa') задается так, чтобы иметь разность постоянной степени открытия (разность постоянной степени открытия) относительно порогового значения степени открытия акселератора (APSa).
Например, пороговое значение степени открытия акселератора задается в соответствии с зацеплением и расцеплением блокировочной муфты (не показана) автоматической трансмиссии на основе преобразователя крутящего момента. Как поясняется посредством использования фиг. 4, хорошо известно, что эта блокировочная муфта является механизмом, непосредственно соединяющим входную сторону и выходную сторону преобразователя крутящего момента. Эта блокировочная муфта управляется так, что она переключается с тем, чтобы зацепляться или расцепляться, на основе скорости VSP транспортного средства и степени APS открытия акселератора. Эта блокировочная муфта переходит в расцепленное состояние в области без блокировки (не-L/U) (области, показанной посредством заштрихованных линий на фиг. 4), в которой степень APS открытия акселератора является большой на стороне низкой скорости транспортного средства. Эта блокировочная муфта переходит в зацепленное состояние в области блокировки (L/U), в которой степень APS открытия акселератора является небольшой на стороне высокой скорости транспортного средства. В этом случае уровень расхода топлива относительно ухудшается в состоянии, в котором блокировочная муфта расцепляется, относительно состояния, в котором блокировочная муфта зацепляется. Соответственно, в случае этого примера, область без блокировки рассматривается как область состояния вождения с высоким уровнем расхода топлива, и область блокировки рассматривается как область состояния вождения с низким уровнем расхода топлива. Когда степень APS открытия акселератора увеличивается из области блокировки в область без блокировки, сила нажатия педали акселератора увеличивается.
В этом случае модуль 10 управления определяет, находится ли блокировочная муфта в расцепленном состоянии (не-L/U-область) или в зацепленном состоянии (L/U-область), из введенной скорости VSP транспортного средства и введенной степени APS открытия акселератора, на основе характерного вида по фиг. 4. Когда блокировочная муфта находится в зацепленном состоянии (L/U-область), значение степени APS открытия акселератора на граничной линии L1 области по фиг. 4, которое соответствует скорости VSP транспортного средства, введенной из датчика скорости транспортного средства, определяется в качестве порогового значения APSa1 степени открытия акселератора для увеличения силы нажатия. Например, когда скорость транспортного средства представляет собой VSP1, соответствующая степень APSa1 открытия акселератора становится пороговым значением степени открытия акселератора для увеличения силы нажатия педали 2 акселератора, как показано на чертеже. Кроме того, модуль 10 управления задает пороговое значение APSa1' подавления величины увеличения в качестве степени открытия акселератора, которая меньше этого порогового значения APSa1 степени открытия акселератора на заданную степень открытия. Это пороговое значение APSa1' подавления величины увеличения является пороговым значением степени открытия акселератора для подавления, т.е. снижения заданной величины увеличения силы нажатия, которая увеличивается еще при пороговом значении APSa1 степени открытия акселератора. Когда степень открытия акселератора становится равной или меньшей этого порогового значения APSa1' подавления величины увеличения, вышеописанная величина увеличения силы нажатия подавляется. Например, это пороговое значение подавления величины увеличения задается как значение, имеющее разность постоянной степени открытия относительно порогового значения APSa1 степени открытия акселератора. Альтернативно, это пороговое значение подавления величины увеличения может быть вычислено посредством умножения порогового значения APSa1 степени открытия акселератора на постоянный коэффициент. Тем не менее, способ получения порогового значения подавления величины увеличения не ограничивается этими способами.
Кроме того, как показано на фиг. 5, пороговое значение степени открытия акселератора может задаваться так, что оно соответствует переключению "вниз" коробки передач автоматической трансмиссии (автоматическому переключению передач на низкую ступень).
Фиг. 5 показывает, в качестве одного примера, схему переключения передач пятискоростной автоматической трансмиссии. Как показано на чертеже, управление переключением передач выполняется на основе скорости VSP транспортного средства и степени APS открытия акселератора. Тем не менее, в общем, уровень расхода топлива является низким на высокой ступени коробки передач. Соответственно, в этом случае линия L2 переключения передач с пятой скорости на четвертую скорость рассматривается как граничная линия, в которой уровень расхода топлива переключается с относительно низкой области на относительно высокую область. Следовательно, значение степени открытия акселератора на этой граничной линии L2, которая соответствует скорости VSP транспортного средства (например, VSP2) в это время, становится пороговым значением APSa2 степени открытия акселератора. Кроме того, аналогично, пороговые значения степени открытия акселератора могут задаваться относительно линий L3-L5 переключения передач других ступеней переключения передач. Пороговое значение подавления величины увеличения для подавления, т.е. снижения заданной величины увеличения силы нажатия, которая увеличивается еще при пороговом значении APSa2 степени открытия акселератора, задается таким же образом, как пороговое значение подавления величины увеличения, которое задается так, что оно соответствует зацеплению и расцеплению блокировочной муфты (не показана) в автоматической трансмиссии на основе преобразователя крутящего момента.
Кроме того, пороговое значение степени открытия акселератора может задаваться так, что оно соответствует области увеличения топлива на стороне с высокой нагрузкой двигателя, в дополнение к вышеописанному способу. Пороговое значение степени открытия акселератора может задаваться посредством характеристики экономии топлива двигателя.
Кроме того, трансмиссия может быть, например, бесступенчатой трансмиссией, в которой передаточное отношение трансмиссии непрерывно варьируется, или механической трансмиссией с ручным управлением. В случае бесступенчатой трансмиссии, можно вычислять передаточное отношение трансмиссии в качестве соотношения между частотой вращения стороны входного вала и частотой вращения стороны выходного вала.
Модуль 10 управления выводит команду управления увеличением силы нажатия в актуатор 9, когда степень открытия акселератора становится больше вышеописанного порогового значения степени открытия акселератора, когда водитель нажимает педаль акселератора. Актуатор 9 приводится в действие на основе этой команды управления увеличением силы нажатия, так что сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия.
В случае, если команда управления увеличением силы нажатия, выведенная из модуля 10 управления в актуатор 9, когда степень открытия акселератора становится больше порогового значения степени открытия акселератора, является целевым значением А команды управления увеличением силы нажатия, которое увеличивает силу нажатия педали 2 акселератора на вышеописанную величину увеличения силы нажатия относительно базовой силы нажатия, как показано на фиг. 6(b), это целевое значение А команды управления увеличением силы нажатия выводится ступенчатым способом со времени t1, в которое степень открытия акселератора становится пороговым значением степени открытия акселератора. Тем не менее, сила нажатия педали 2 акселератора увеличивается на вышеописанную величину увеличения силы нажатия относительно базовой силы нажатия, во время, которое запаздывает от t1, как показано посредством сплошной линии на фиг. 6(c). Сила нажатия педали 2 акселератора не увеличивается на вышеописанную величину увеличения силы нажатия относительно базовой силы нажатия сразу во время t1, как показано в пунктирной линии P на фиг. 6(c). Вследствие этого, становится затруднительным для водителя испытывать ощущение барьера относительно ощущения при нажатии педали 2 акселератора. Другими словами, существует запас для повышения чувствительности к тому, чтобы увеличивать фактическую силу нажатия педали 2 акселератора на заданную величину увеличения силы нажатия относительно базовой силы нажатия во время t1, в которое степень открытия акселератора становится больше порогового значения степени открытия акселератора. Кроме того, пунктирная линия P на фиг. 6(c) показывает случай, когда сила нажатия педали 2 акселератора сформирована так, как инструктировано посредством команды управления увеличением силы нажатия.
Соответственно, в этом варианте осуществления, когда степень открытия педали акселератора становится больше порогового значения степени открытия акселератора, и сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия (время t1), выполняется управление перерегулированием, как показано на фиг. 7(b). При управлении перерегулированием команда управления увеличением силы нажатия еще увеличивается относительно целевого значения А команды управления увеличением силы нажатия, которое должно увеличивать силу нажатия педали 2 акселератора относительно базовой силы нажатия на заданную величину увеличения силы нажатия, и затем возвращается к целевому значению А команды управления увеличением силы нажатия.
Управление перерегулированием в этом варианте осуществления использует в качестве регулируемых переменных перерегулирования значение B команды управления перерегулированием, которое является величиной увеличения (величиной перерегулирования) относительно целевого значения А команды управления увеличением силы нажатия для команды управления увеличением силы нажатия, и время поддержания перерегулирования, в течение которого команда управления увеличением силы нажатия поддерживается в состоянии, в котором значение B команды управления перерегулированием суммируется с целевым значением А команды управления увеличением силы нажатия. Эти регулируемые переменные перерегулирования задаются на основе абсолютной величины гистерезиса базовой силы нажатия педали 2 акселератора. Абсолютная величина гистерезиса базовой силы нажатия педали 2 акселератора представляется посредством таких единиц, как [Н] или [кгс]. В этом варианте осуществления, абсолютная величина гистерезиса базовой силы нажатия педали 2 акселератора задается в соответствии с типами транспортных средств. Другими словами, как показано на фиг. 3, характеристика силы нажатия педали акселератора задается так, что она различается в соответствии с типом транспортного средства. Абсолютная величина гистерезиса базовой силы нажатия педали 2 акселератора задается таким образом, что идентичный тип транспортных средств имеет идентичное значение, и таким образом, что различные типы транспортных средств имеют различные значения. Другими словами, абсолютные величины гистерезиса базовой силы нажатия педали 2 акселератора задаются так, что они имеют различные значения между транспортными средствами, имеющими различные характеристики силы нажатия педали акселератора для используемой педали 2 акселератора.
Значение B команды управления перерегулированием, которое суммируется с целевым значением А команды управления увеличением силы нажатия, постепенно снижается за заданное время снижения значения команды управления перерегулированием со времени t2, в которое истекло время поддержания перерегулирования. Команда управления увеличением силы нажатия становится командой A управления целевым увеличением силы нажатия во время t3, в которое истекло время снижения значения команды управления перерегулированием.
В этом варианте осуществления, во время t1 выводится команда управления увеличением силы нажатия, которая превышает команду A управления целевым увеличением силы нажатия для увеличения заданной величины увеличения силы нажатия относительно базовой силы нажатия. Сила нажатия педали 2 акселератора сразу увеличивается, как показано в сплошной линии на фиг. 7(c), относительно случая, при котором команда управления увеличением силы нажатия целевого значения А команды управления увеличением силы нажатия выводится во время t1. Другими словами, хотя сила нажатия педали 2 акселератора не сразу увеличивается на заданную величину увеличения силы нажатия относительно базовой силы нажатия во время t1, сила нажатия педали 2 акселератора увеличивается на заданную величину увеличения силы нажатия относительно базовой силы нажатия в течение относительно короткого времени со времени t1. Вследствие этого, водитель может испытывать ощущение барьера относительно ощущения при нажатии педали 2 акселератора.
Кроме того, команда управления увеличением силы нажатия, выведенная во время t1, является значением, полученным посредством суммирования значения B команды управления перерегулированием с целевым значением А команды управления увеличением силы нажатия. Соответственно, когда значение B команды управления перерегулированием чрезвычайно увеличивается, реакция становится большой, и нога водителя, нажимающего педаль 2 акселератора, возвращается, так что удобство использования снижается. Кроме того, сила нажатия педали 2 акселератора увеличивается так, что она равна или превышает заданную величину увеличения силы нажатия, соответствующую целевому значению А команды управления увеличением силы нажатия в состоянии, в котором значением B команды управления перерегулированием по-прежнему суммируется с целевым значением А команды управления увеличением силы нажатия. Тем не менее, можно подавлять перерегулирование величины увеличения силы нажатия педали 2 акселератора относительно заданной величины увеличения силы нажатия, соответствующей целевому значению А команды управления увеличением силы нажатия, посредством надлежащего задания значения B команды управления перерегулированием и времени поддержания перерегулирования. Кроме того, пунктирная линия Q на фиг. 7(c) представляет случай, в котором сила нажатия педали 2 акселератора сформирована так, как инструктировано посредством команды управления увеличением силы нажатия.
Другими словами, когда сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия, значение B команды управления перерегулированием, заданное на основе абсолютной величины гистерезиса базовой силы нажатия педали 2 акселератора, суммируется с целевым значением А команды управления увеличением силы нажатия для увеличения относительно базовой силы нажатия на заданную величину увеличения силы нажатия. Кроме того, состояние, в котором значение B команды управления перерегулированием суммируется с целевым значением А команды управления увеличением силы нажатия, поддерживается в течение времени поддержания перерегулирования, заданного на основе абсолютной величины гистерезиса базовой силы нажатия педали 2 акселератора. Вследствие этого, можно повышать чувствительность к тому, чтобы увеличивать силу нажатия педали 2 акселератора на заданную величину увеличения силы нажатия относительно базовой силы нажатия, относительно времени t1, в котором степень открытия акселератора становится больше порогового значения степени открытия акселератора. Кроме того, можно предотвращать снижение удобства использования вследствие чрезмерного увеличения силы нажатия педали 2 акселератора.
Другими словами, когда сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия, регулируемые переменные перерегулирования задаются на основе абсолютной величины гистерезиса базовой силы нажатия педали 2 акселератора. Соответственно, можно надлежащим образом задавать регулируемые переменные перерегулирования, чтобы повышать чувствительность к увеличению силы нажатия, когда сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия, и предотвращать снижение удобства использования педали 2 акселератора.
В случаеесли базовая сила нажатия педали 2 акселератора имеет гистерезис, имеющий различные значения в направлении увеличения степени открытия и в направлении уменьшения степени открытия для степени открытия акселератора, когда сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия, ноге водителя, нажимающего педаль 2 акселератора, проще возвращаться посредством этой силы реакции, когда гистерезис меньше.
Соответственно, как показано на фиг. 8, значение B команды управления перерегулированием задается меньшим, когда гистерезис базовой силы нажатия меньше. Другими словами, этот вариант осуществления имеет гистерезис базовой силы нажатия педали 2 акселератора, как показано на фиг. 3. Значение B команды управления перерегулированием задается посредством абсолютной величины этого гистерезиса и характерного вида, показанного на фиг. 8. Кроме того, транспортное средство может использовать педаль акселератора с характеристикой, отличающейся от показанной на фиг. 3. Соответственно, когда абсолютная величина гистерезиса базовой силы нажатия педали 2 акселератора отличается, значение B команды управления перерегулированием задается посредством абсолютной величины гистерезиса в это время и характерного вида по фиг. 8.
Ноге водителя, нажимающего педаль 2 акселератора, проще возвращаться по мере того, как гистерезис становится меньшим при управлении перерегулированием. Соответственно, можно не допускать возврата ноги водителя, нажимающего педаль 2 акселератора, посредством снижения значения B команды управления перерегулированием.
Как показано на фиг. 9, время поддержания перерегулирования задается менее длительным, когда гистерезис базовой силы нажатия больше. Другими словами, этот вариант осуществления имеет гистерезис базовой силы нажатия педали 2 акселератора, как показано на фиг. 3. Время поддержания перерегулирования задается посредством абсолютной величины этого гистерезиса и характерного вида, показанного на фиг. 9.
Ноге водителя, нажимающего педаль 2 акселератора, затруднительно возвращаться при управлении перерегулированием по мере того, как гистерезис становится большим. Соответственно, становится просто поддерживать степень открытия акселератора равной постоянному значению, даже когда время поддержания перерегулирования, которое представляет собой период времени, в который нога водителя, нажимающего педаль 2 акселератора, регулируется (привыкает) согласно силе нажатия педали 2 акселератора, т.е. период времени, в который нога водителя, нажимающего педаль 2 акселератора, балансируется с силой нажатия педали 2 акселератора, является относительно небольшим.
Кроме того, вышеописанные регулируемые переменные перерегулирования задаются на основе абсолютной величины целевого значения А команды управления увеличением силы нажатия.
Водителю проще испытывать ощущение барьера относительно ощущения при нажатии педали 2 акселератора, когда сила нажатия педали 2 акселератора сразу увеличивается. Тем не менее, ноге водителя, нажимающего педаль 2 акселератора, проще возвращаться.
Соответственно, значение B команды управления перерегулированием задается меньшим по мере того, как команда A управления целевым увеличением силы нажатия становится большей, как показано на фиг. 10. Другими словами, в этом варианте осуществления, когда степень открытия акселератора становится больше заданного порогового значения степени открытия акселератора (APSa), сила нажатия педали акселератора увеличивается на заданную величину относительно базовой силы нажатия, как показано на фиг. 3. Значение B команды управления перерегулированием задается посредством абсолютной величины целевого значения А команды управления увеличением силы нажатия для увеличения на заданную величину и характерного вида, показанного на фиг. 10. Кроме того, транспортное средство может использовать педаль акселератора, имеющую различную заданную величину для увеличения силы нажатия педали акселератора относительно базовой силы нажатия. Соответственно, когда целевое значение А команды управления увеличением силы нажатия для увеличения на заданную величину отличается, значение B команды управления перерегулированием задается посредством абсолютной величины целевого значения А команды управления увеличением силы нажатия в это время и характерного вида по фиг. 10.
Когда сила нажатия педали 2 акселератора увеличивается относительно базовой силы нажатия, сила нажатия, которую ощущает нога водителя, нажимающего педаль 2 акселератора, становится большей, когда целевое значение А команды управления увеличением силы нажатия больше. Вследствие этого, даже когда значение B команды управления перерегулированием становится меньшим, когда целевое значение А команды управления увеличением силы нажатия больше, можно не допускать возврата ноги водителя, нажимающего педаль 2 акселератора, и испытывать ощущение барьера относительно ощущения при нажатии педали 2 акселератора.
Как показано на фиг. 11, время поддержания перерегулирования задается более длительным по мере того, как целевое значение А команды управления увеличением силы нажатия становится большим.
Сила нажатия педали 2 акселератора становится большей, когда целевое значение А команды управления увеличением силы нажатия больше. Вследствие этого, водитель концентрирует большую силу на ноге, нажимающей педаль 2 акселератора. Соответственно, требуется время для балансирования ноги водителя, нажимающего педаль 2 акселератора, с силой нажатия педали 2 акселератора. Следовательно, время поддержания перерегулирования задается относительно более длительным, когда целевое значение А команды управления увеличением силы нажатия больше. Вследствие этого, можно упрощать поддержание степени открытия акселератора равной постоянному значению.
Кроме того, в настоящем изобретении, заданная величина увеличения силы нажатия, суммированная в соответствии с базовой силой нажатия, т.е. абсолютная величина целевого значения А команды управления увеличением силы нажатия, поддерживается равной постоянному значению. Тем не менее, заданная величина увеличения силы нажатия, т.е. абсолютная величина целевого значения А команды управления увеличением силы нажатия может варьироваться в соответствии с состоянием вождения и т.д. транспортного средства. Например, заданная величина увеличения силы нажатия (целевое значение А команды управления увеличением силы нажатия) может задаваться большей, когда степень открытия акселератора, когда сила нажатия увеличивается, больше. Кроме того, значение B команды управления перерегулированием или время поддержания перерегулирования могут варьироваться на основе различной абсолютной величины целевого значения А команды управления увеличением силы нажатия.
Таким образом, регулируемые переменные перерегулирования задаются на основе гистерезиса базовой силы нажатия педали 2 акселератора и целевого значения А команды управления увеличением силы нажатия. Тем не менее, величина возврата степени открытия акселератора посредством силы реакции, когда сила нажатия педали 2 акселератора увеличивается, отличается в соответствии с силой нажатия, положением нажатия и т.д. педали 2 акселератора водителем. Соответственно, вышеописанные регулируемые переменные перерегулирования могут задаваться в соответствии с величиной R возврата степени открытия акселератора при управлении перерегулированием.
Как подробно проиллюстрировано ниже посредством использования фиг. 12, когда величина R возврата степени открытия акселератора в ходе управления перерегулированием, т.е. разность между максимальным значением степени открытия акселератора в ходе управления перерегулированием и степенью открытия акселератора в завершении управления перерегулированием является большой, нога, нажимающая педаль 2 акселератора, возвращается в ходе управления перерегулированием. Соответственно, величина R возврата степени открытия акселератора в ходе управления перерегулированием сохраняется в качестве обучаемого значения. Регулируемые переменные перерегулирования варьируются с тем, чтобы снижать величину R возврата степени открытия акселератора в ходе управления перерегулированием на основе этого обучаемого значения при следующем управлении перерегулированием.
Вследствие этого, можно задавать ощущение барьера как ощущение при нажатии педали 2 акселератора при недопущении возврата ноги водителя, нажимающего педаль 2 акселератора, при управлении перерегулированием, независимо от индивидуального отличия силы нажатия, положения нажатия и т.д. педали 2 акселератора водителем. Кроме того, величина R возврата педали 2 акселератора может задаваться равной величине непрерывного изменения в направлении уменьшения степени открытия акселератора в течение заданного периода времени, который заранее задается со времени t1, в которое степень открытия акселератора становится больше порогового значения степени открытия акселератора.
В случае если значение B команды управления перерегулированием варьируется в соответствии с абсолютной величиной величины R возврата степени открытия акселератора, значение B команды управления перерегулированием задается меньшим, когда величина R возврата степени открытия акселератора больше.
Нога водителя, нажимающего педаль 2 акселератора, возвращается по мере того, как величина R возврата степени открытия акселератора становится большей. Соответственно, значение B команды управления перерегулированием снижается по мере того, как величина R возврата степени открытия акселератора становится большей. Вследствие этого, можно не допускать возврата ноги водителя, нажимающего педаль 2 акселератора.
В случае если время поддержания перерегулирования варьируется в соответствии с абсолютной величиной величины R возврата степени открытия акселератора, время поддержания перерегулирования задается более длительным по мере того, как величина R возврата степени открытия акселератора становится большей.
Нога водителя, нажимающего педаль 2 акселератора, возвращается по мере того, как величина R возврата степени открытия акселератора становится большей. Соответственно, требуется время для балансирования ноги водителя, нажимающего педаль 2 акселератора, с силой нажатия педали 2 акселератора. Следовательно, время поддержания перерегулирования продлевается по мере того, как величина R возврата степени открытия акселератора становится большей. Вследствие этого, можно упрощать поддержание степени открытия акселератора равной постоянному значению.
Кроме того, в вышеописанном варианте осуществления, время поддержания перерегулирования задается при управлении перерегулированием. Тем не менее, можно не задавать время поддержания перерегулирования. Другими словами, как показано на фиг. 13, команда управления увеличением силы нажатия, полученная посредством суммирования значения B команды управления перерегулированием с целевым значением А команды управления увеличением силы нажатия, может выводиться ступенчатым способом во время t1, в которое степень открытия акселератора становится больше порогового значения степени открытия акселератора. Затем значение B команды управления перерегулированием, суммируемое с целевым значением А команды управления увеличением силы нажатия, может быть снижено после этого времени t1. В этом случае только значение B команды управления перерегулированием варьируется в качестве регулируемой переменной перерегулирования.
Кроме того, в вышеописанном варианте осуществления, гистерезис базовой силы нажатия задается равным практически постоянному значению независимо от абсолютной величины степени открытия акселератора. Тем не менее, можно обращаться к случаю, в котором гистерезис базовой силы нажатия задается большим по мере того, как степень открытия акселератора становится большей, и к случаю, в котором гистерезис базовой силы нажатия задается меньшим по мере того, как степень открытия акселератора становится большей.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента

