Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТИРОВАНИЯ ПЕРЕМЕЩАЕМОГО В ПИЛОТИРУЕМОМ АППАРАТЕ ПРИБОРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к аэрокосмической технике и может быть использовано для ориентирования (наведения) экипажем пилотируемого космического или летательного аппарата ручного прибора, перемещаемого внутри движущегося космического или летательного аппарата.
Известен способ прицеливания (патент РФ №2395054 от 06.10.2008, МПК: F41G 3/00.1), включающий поиск цели и наведение на цель путем совмещения прицельной марки оружия с видеоизображением цели на мониторе, получаемым с обзорной видеокамеры, при этом поиск цели проводят по видеоизображению в широком телесном угле, а точное наведение выполняют по увеличенному видеоизображению.
Система, реализующая данный способ прицеливания (патент. РФ №2395054 от 06.10.2008, МПК: F41G 3/00.1), включает прицел оружия, закрепленные на оружии обзорную и одну или две дополнительные видеокамеры и соединенный с видеокамерами монитор.
К недостаткам данных способа и системы прицеливания относится то, что они не обеспечивают возможность наведения на цели, расположенные вне телесного угла поля зрения обзорной видеокамеры.
Известен способ наведения линии визирования прибора, вращающегося вокруг своей оси относительно основания, на источник лазерного излучения (заявка на изобретение РФ №94000376/28, 05.01.1994, МПК 6: F41G 3/00, G05D 3/00), в котором грубо определяют угловое положения источника излучения относительно связанного с основанием базового направления, проверяют соответствие излучения типу лазерный целеуказатель, поворачивают основание до точного определения углового положения источника излучения, после чего поворачивают прибор наведения до наведения его линии визирования на источник излучения.
Устройство наведения линии визирования прибора, вращающегося вокруг своей оси относительно основания, на источник лазерного излучения (заявка на изобретение РФ №94000376/28, 05.01.1994, МПК 6: F41G 3/00, G05D 3/00), реализующее вышеупомянутый способ наведения, содержит датчики, табло, блок задания режима наведения, коммутатор, приводы основания и прибора, блок определения углового положения и типа источника излучения и задания поворота, датчик положения линии визирования прибора.
К недостаткам данных способа и устройства наведения относится требование идентификации цели по излучаемому целью излучению, что ограничивает возможности их использования.
В качестве способа-прототипа выбран способ наведения телевизионного видеоспектрального комплекса, реализуемый системой управления телевизионным видеоспектральным комплексом космического аппарата (КА) (патент РФ №2068801 от 16.01.1992, МПК 6: B64G 9/00 - прототип способа), который включает наведение и отслеживание целей, при которых выполняется переориентация оси визирования установленной на поворотной платформе телевизионной и научной аппаратуры на выбираемую в реальном времени по ТВ-изображению цель с последующим автоматическим отслеживанием цели, в том числе выполняется определение пространственного положения прибора наведения относительно КА, задание координат целей, определение положения целей относительно прибора наведения, расчет углов поворота прибора наведения и повороты прибора наведения.
В качестве системы-прототипа выбрана реализующая способ-прототип система управления телевизионным видеоспектральным комплексом космического аппарата (КА) (патент РФ №2068801 от 16.01.1992, МПК 6: B64G 9/00 - прототип системы), содержащая функциональные блоки автоматического наведения и отслеживания заданных целей, координаты которых вводятся в систему, функциональные блоки управления наведением поворотной платформы и переориентации комплекса аппаратуры от экипажа и функциональные блоки контроля и квитирования управляющей информации, в том числе система-прототип включает: автоматическую стабилизированную платформу (АСП) с целевой научной аппаратурой и телевизионной системой, блок задания параметров движения КА, блок задания текущей ориентации КА, блоки задания координат целей в инерциальной, орбитальной и гринвичской системах координат, наземную и бортовую телефонно-телеграфные системы (НТТС и БТТС), блок синхронизации приема телефонно-телеграфных сообщений (БСП), блоки формирования углового положения (БФУП), блок определения угловой скорости наведения (БОУСН), блок формирования управляющих воздействий (БФУВ).
БФУП по информации об элементах орбиты и текущей ориентации КА определяет положение цели относительно прибора наведения.
АСП в том числе содержит блок определения пространственного положения прибора наведения относительно КА, в котором формируются сигналы, соответствующие текущим углам ориентации АСП относительно КА, которые с выходов АСП поступают в БОУСН.
БОУСН определяет угловую скорость наведения на цель и взаимное расположение оси визирования АСП и направления на цель.
БФУВ рассчитывает команды на поворот прибора наведения, которые с выхода БФУВ поступают в АСП и по получении которых АСП начинает движение с заданной скоростью.
Установленная на АСП телевизионная система передает на Землю телевизионный сигнал, по которому телеоператор на Земле имеет возможность визуально контролировать процесс наведения.
НТТС и БТТС обеспечивают передачу и прием телефонно-телеграфных сообщений с Земли на борт КА и содержат приемопередающие устройства, одно из которых установлено на КА, а другое на Земле.
БСП обеспечивает синхронизацию последовательного приема разрядов слов телефонно-телеграфных сообщений с частотой работы канала телефонно-телеграфной системы.
К недостаткам прототипов способа и системы относится то, что они позволяют наводиться только на цели, с одной стороны, ограниченные диапазоном углов поворота поворотной платформы, а с другой стороны, ограниченные попаданием в текущий кадр ТВ-изображения, который, кроме упомянутого ограничения по диапазону углов поворота поворотной платформы, имеет ограниченный охват, определяемый полем зрения ТВ-камеры. При этом сам факт размещения аппаратуры наведения на поворотной платформе ограничивает свободу перемещения аппаратуры при ее нацеливании и сопровождении цели экипажем КА. Указанные недостатки существенно ограничивают возможности применении прототипов способа и системы.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение ориентирования (наведения) прибора, свободно перемещаемого внутри пилотируемого аппарата (ПА) и не имеющего с ним механической связи.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в обеспечении гарантированного ориентирования (наведения) прибора, свободно перемещаемого относительно ПА и не имеющего с ним механической связи, по задаваемым ориентирам.
Технический результат достигается тем, что в способе ориентирования перемещаемого в пилотируемом аппарате прибора, включающем определение пространственного положения прибора относительно пилотируемого аппарата, задание ориентиров, определение положения ориентиров относительно прибора, расчет углов поворота прибора и повороты прибора, дополнительно осуществляют формирование управляющих команд на излучение импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми излучателями, размещенными в разнесенных точках на свободно перемещаемом относительно пилотируемого аппарата приборе, осуществляют прием излученных импульсных ультразвуковых сигналов не менее чем тремя ультразвуковыми приемниками, размещенными в разнесенных точках на пилотируемом аппарате, по излученным и принятым ультразвуковым сигналам измеряют время задержки ультразвуковых сигналов, при этом синхронизацию моментов излучения и приема импульсных ультразвуковых сигналов осуществляют по радиоканалу, осуществляют измерение температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников, по полученным временам задержки принятия ультразвуковых сигналов и измерениям температуры определяют расстояния от размещенных на приборе ультразвуковых излучателей до размещенных на пилотируемом аппарате ультразвуковых приемников, при этом пространственное положение прибора относительно пилотируемого аппарата определяют по определенным расстояниям от размещенных на приборе ультразвуковых излучателей до размещенных на пилотируемом аппарате ультразвуковых приемников, определяют текущее положение ориентиров относительно пилотируемого аппарата, пространственное положение ориентиров относительно прибора определяют по текущему положению ориентиров относительно пилотируемого аппарата и определенному пространственному положению прибора относительно пилотируемого аппарата, выполняют расчет углов поворота прибора для его ориентирования по ориентирам, после чего воспроизводят команды на поворот прибора, соответствующие рассчитанным значениям углов поворота прибора.
Технический результат достигается также тем, что система наведения перемещаемого относительно пилотируемого аппарата прибора, включающая синхронизатор, блок определения пространственного положения прибора относительно пилотируемого аппарата, блок определения положения ориентира относительно прибора, блок расчета команд на поворот прибора, два приемопередающих устройства, одно из которых установлено на пилотируемом аппарате, дополнительно содержит блок определения текущего положения ориентира относительно пилотируемого аппарата, не менее чем три ультразвуковых излучателя и не менее чем один датчик температуры, установленные на приборе, не менее чем три ультразвуковых приемника и не менее, чем один датчик температуры, установленные на пилотируемом аппарате, блок формирования команд управления излучателями, контроллеры, блок усиления сигналов, блок автоматической регулировки усиления, многоканальный аналого-цифровой преобразователь, блок измерения времени задержки сигналов и блок воспроизведения команд на поворот прибора, причем другое из приемопередающих устройств установлено на приборе, при этом входы ультразвуковых излучателей соединены с выходами блока формирования команд управления излучателями, вход которого соединен с первым выходом первого контроллера, второй выход и первый и второй входы которого соединены с соответственно входом и выходом приемопередающего устройства, установленного на приборе, и выходом датчика температуры, установленного на приборе, причем выходы ультразвуковых приемников соединены с входами блока усиления сигналов, выходы которого соединены с входами блока автоматической регулировки усиления, выходы которого соединены с входами многоканального аналого-цифровой преобразователя, выход которого соединен с первым входом блока измерения времени задержки сигналов, второй вход которого соединен с выходом синхронизатора, который также соединен с первым входом второго контроллера, второй вход и первый и второй выходы которого соединены с соответственно выходом и входом приемо-передающего устройства, установленного на пилотируемом аппарате, и первым входом блока определения пространственного положения прибора относительно пилотируемого аппарата, второй и третий входы и выход которого соединены с, соответственно, выходом блока измерения времени задержки сигналов, выходом датчика температуры, установленного на пилотируемом аппарате, и входом блока определения положения ориентира относительно прибора, другой вход и выход которого соединены с, соответственно, выходом блока определения текущего положения ориентира относительно пилотируемого аппарата и входом блока расчета команд на поворот прибора, выход которого соединен с входом блока воспроизведения команд на поворот прибора.
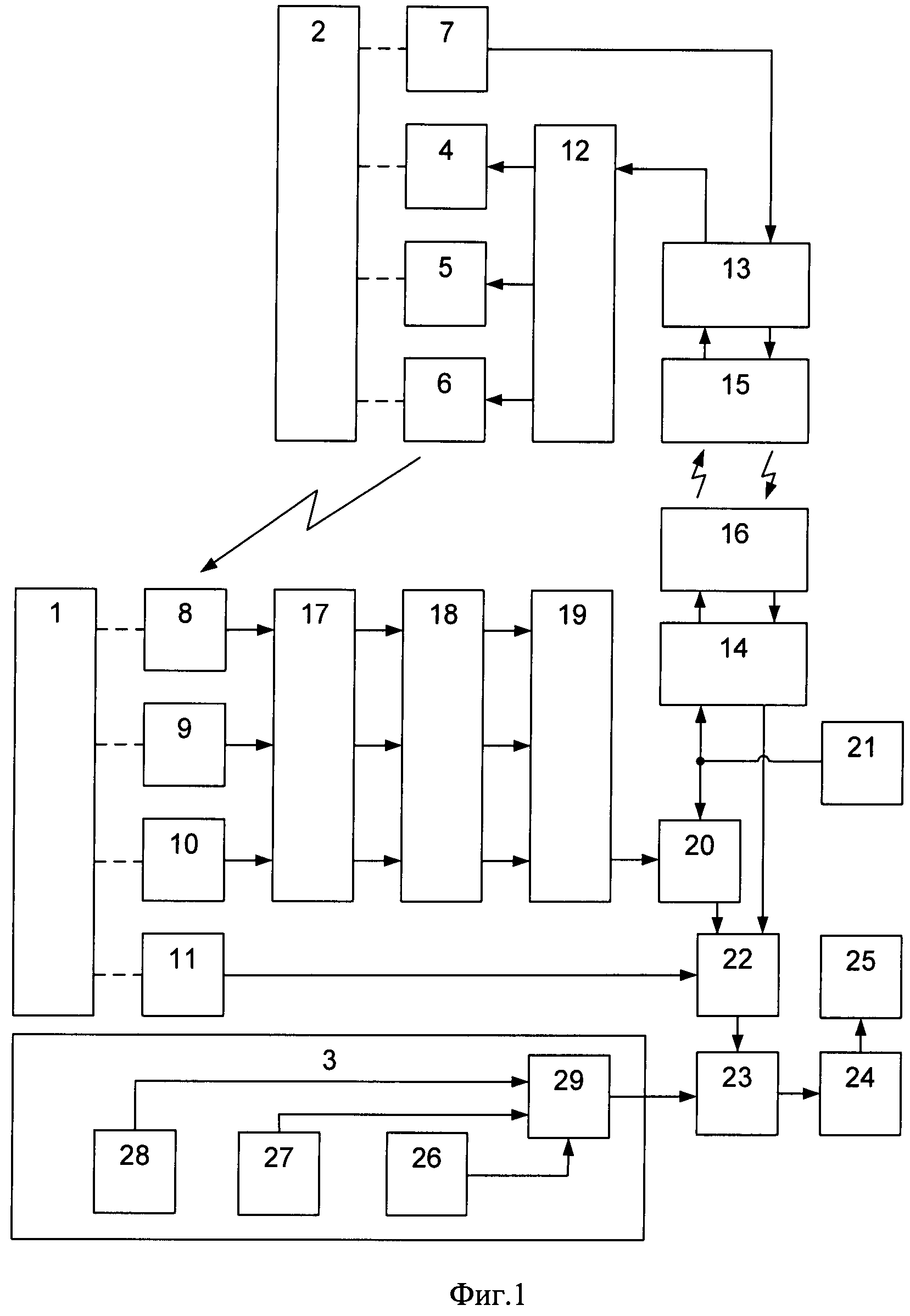
На фиг.1 представлена блок-схема предлагаемой системы, реализующей предлагаемый способ, и введены следующие обозначения:
1 - ПА;
2 - прибор;
3 - блок определения текущего положения ориентира относительно ПА;
4, 5, 6 - ультразвуковые излучатели;
7 - датчик температуры, установленный на приборе наведения;
8, 9, 10 - ультразвуковые приемники;
11 - датчик температуры, установленный на ПА;
12 - блок формирования команд управления излучателями;
13, 14 - контроллеры;
15 - приемопередающее устройство, установленное на приборе;
16 - приемопередающее устройство, установленное на ПА;
17 - блок усиления сигналов;
18 - блок автоматической регулировки усиления;
19 - многоканальный аналого-цифровой преобразователь;
20 - блок измерения времени задержки сигналов;
21 - синхронизатор;
22 - блок определения пространственного положения прибора относительно ПА;
23 - блок определения положения ориентира относительно прибора;
24 - блок расчета команд на поворот прибора;
25 - блок воспроизведения команд на поворот прибора;
26 - блок задания координат ориентира относительно планеты;
27 - блок определения положения центра масс ПА;
28 - блок определения ориентации ПА;
29 - вычислитель.
Для измерения шести координат пространственного положения ориентируемого прибора - трех линейных и трех угловых параметров - необходимо использовать не менее трех ультразвуковых излучателей, размещенных на приборе наведения, и не менее трех ультразвуковых приемников, размещенных на ПА. Датчики температуры, измерения которых используются для определения текущей скорости распространения ультразвуковых сигналов между излучателями и приемниками, могут быть размещены как непосредственно рядом с каждым излучателем и каждым приемником, так и по одному на ориентируемом приборе и на ПА.
Описание способа совместим с описанием системы для его осуществления при использовании трех ультразвуковых излучателей и одного датчика температуры, установленных на ориентируемом приборе, и трех ультразвуковых приемников и одного датчика температуры, установленных на ПА.
В таком исполнении система содержит ПА 1, прибор 2, блок определения текущего положения ориентира относительно ПА 3, три ультразвуковых излучателя 4, 5, 6 и датчик температуры 7, установленные на приборе 2, три ультразвуковых приемника 8, 9, 10 и датчик температуры 11, установленные на ПА 1, блок формирования команд управления излучателями 12, контроллеры 13, 14, приемопередающее устройство 15, установленное на приборе 2, приемопередающее устройство 16, установленное на ПА 1, блок усиления сигналов 17, блок автоматической регулировки усиления 18, многоканальный аналого-цифровой преобразователь 19, блок измерения времени задержки сигналов 20, синхронизатор 21, блок определения пространственного положения прибора относительно ПА 22, блок определения положения ориентира относительно прибора 23, блок расчета команд на поворот прибора 24, блок воспроизведения команд на поворот прибора 25.
Ультразвуковые излучатели 4, 5, 6 размещены в разнесенных точках с известными координатами в связанной с прибором 2 системе координат. Входы ультразвуковых излучателей 4, 5, 6 соединены с выходами блока формирования команд управления излучателями 12, вход которого соединен с первым выходом первого контроллера 13, второй выход и первый и второй входы которого соединены с, соответственно, входом и выходом приемопередающего устройства 15, установленного на приборе 2, и выходом датчика температуры 7, установленного на приборе 2.
Ультразвуковые приемники 8, 9, 10 размещены в разнесенных точках с известными координатами в связанной с ПА 1 системе координат. Выходы ультразвуковых приемников 8, 9, 10 соединены с входами блока усиления сигналов 17, выходы которого соединены с входами блока автоматической регулировки усиления 18, выходы которого соединены с входами многоканального аналого-цифровой преобразователя 19, выход которого соединен с первым входом блока измерения времени задержки сигналов 20, второй вход которого соединен с выходом синхронизатора 21, который также соединен с первым входом второго контроллера 14, второй вход и первый и второй выходы которого соединены с, соответственно, выходом и входом приемопередающего устройства 16, установленного на ПА 1, и первым входом блока определения пространственного положения прибора относительно ПА 22, второй и третий входы и выход которого соединены с, соответственно, выходом блока измерения времени задержки сигналов 20, выходом датчика температуры 11, установленного на ПА 1, и входом блока определения положения ориентира относительно прибора 23, другой вход и выход которого соединены с, соответственно, выходом блока определения текущего положения ориентира относительно ПА 3 и входом блока расчета команд на поворот прибора 24, выход которого соединен с входом блока воспроизведения команд на поворот прибора 25.
В начале каждого кадра измерения синхронизатор 21 вырабатывает синхронизирующий импульс запуска, поступающий на блок измерения времени задержки сигналов 20 и одновременно через второй контроллер 14, приемопередающее устройство 16, установленное на ПА 1, приемопередающее устройство 15, установленное на приборе 2, и первый контроллер 13 на блок формирования команд управления излучателями 12.
При получении вышеупомянутого сигнала блок формирования команд управления излучателями 12 последовательно формирует на своих выходах импульсы с фиксированной временной задержкой т между ними. Данные импульсы поступают на ультразвуковые излучатели 4, 5, 6, которые поочередно вырабатывают импульсные ультразвуковые сигналы.
Излученные ультразвуковые сигналы принимают с помощью размещенных на ПА ультразвуковых приемников 8, 9, 10. Упомянутая временная задержка между импульсными ультразвуковыми сигналами τ определяется рабочей зоной расположения прибора относительно ПА, которая определяется максимально возможным расстоянием от прибора до каждого из размещенных на ПА ультразвуковых приемников. При этом периодичность выработки синхронизатором 21 синхронизирующих импульсов запуска определяется данной временной задержкой τ и общим количеством ультразвуковых излучателей.
Принятые ультразвуковые сигналы через блок усиления сигналов 17 и блок автоматической регулировки усиления 18 поступают на многоканальный аналого-цифровой преобразователь 19, с выхода которого оцифрованные значения поступают на вход блока измерения времени задержки сигналов 20.
Блок измерения времени задержки сигналов 20 проводит анализ оцифрованных значений сигналов приемников 8, 9, 10, отделяет рабочие сигналы, полученные от излучателей 4, 5, 6, от помех и вычисляет временные задержки между импульсом запуска и принятыми рабочими сигналами. При этом, поскольку излученные импульсные ультразвуковые сигналы разнесены по времени, то в каждом из приемников принятые рабочие сигналы также разнесены по времени.
С выхода блока измерения времени задержки сигналов 20 измеренные времена задержки сигналов поступают в блок определения пространственного положения прибора относительно ПА 22.
Сигнал от датчика температуры 7, установленного на приборе 2, через первый контроллер 13, приемопередающее устройство 15, установленное на приборе 2, приемопередающее устройство 16, установленное на ПА 1, и второй контроллер 14 также поступает в блок определения пространственного положения прибора относительно ПА 22.
Сигнал от датчика температуры 11, установленного на ПА 1, также поступает в блок определения пространственного положения прибора относительно ПА 22.
В блоке определения пространственного положения прибора относительно ПА 22 по полученным временам задержки рассчитываются расстояния между ультразвуковыми излучателями 4, 5, 6 и ультразвуковыми приемниками 8, 9, 10, причем скорость звука вычисляется с учетом средней температуры, полученной с датчиков температуры 7, 11. По полученным расстояниям рассчитывается пространственное положение прибора относительно ПА, - линейные и угловые координаты прибора в связанной с ПА системе координат, которые передаются в блок определения положения ориентира относительно прибора 23.
В блоке определения текущего положения ориентира относительно ПА 3 определяется текущее положение ориентира относительно ПА, которое также передается в блок определения положения ориентира относительно прибора 23.
Например, блок определения текущего положения ориентира относительно ПА 3 может содержать блок задания координат ориентира относительно планеты 26, блок определения положения центра масс ПА 27 и блок определения ориентации ПА 28, выходы которых соединены с вычислителем 29, в котором рассчитывается текущее пространственное положение ориентира в осях системы координат, связанной с ПА, при этом выход вычислителя 29 является блока определения текущего положения ориентира относительно ПА 3. Блок определения положения центра масс ПА 27 и блок определения ориентации ПА 28 могут быть выполнены на основе средств навигационных измерений движения ПА.
В качестве ориентируемого прибора может использоваться, например, оптический прибор, ось чувствительности которого требуется наводить на задаваемые на поверхности планеты цели, измерительный прибор, который необходимо заданным образом ориентировать относительно магнитного поля, или любой другой измерительный прибор, требующий специального ориентирования в моменты выполнения измерений. При этом при ориентировании прибора относительно магнитного поля в качестве ориентира может рассматриваться направление силовых линий магнитного поля.
В блоке определения положения ориентира относительно прибора 23 рассчитывается пространственное положение ориентира относительно системы координат прибора, которое передается в блок расчета команд на поворот прибора 24.
Блок расчета команд на поворот прибора 24 выполняет расчет значений углов поворота, на которые необходимо повернуть прибор, и представляет их в виде команд на поворот прибора.
Блок воспроизведения команд на поворот прибора 25 воспроизводит подготовленные команды посредством технических средств воспроизведения, например, путем воспроизведения команд в звуковом или визуальном формализованных форматах, приспособленных для восприятия экипажем КА - звуковоспроизводящей аппаратурой, выводящей звук, например, на внешние динамики или наушники, или средством визуального отображения, выводящим изображение, например, на дисплей или очки.
Оператор, находящийся на борту ПА, воспринимает воспроизведенные команды и вручную поворачивает прибор в соответствии с полученными командами, реализуя тем самым требуемую ориентацию прибора относительно ориентира.
В предлагаемом изобретении приемопередающие устройства 15, 16 выполнены в виде радиотрансиверов, частотный диапазон работы которых выбирается исходя из требований безопасности, отсутствия помех и взаимовлияний на работу другого штатного радиооборудования внутри ПА. Номинально данные радиотрансиверы могут работать, например, в диапазоне Wi-Fi (частота 2,4 гГц) по протоколу SimpliciTI.
В качестве ультразвуковых излучателей и приемников могут быть использованы, например, ультразвуковые датчики фирмы Murata Manufactoring Co., Ltd. (http://www.murata.com): MA40E8-2 - ультразвуковой приемопередатчик, MA40E7R - ультразвуковой приемник, MA40E7S - ультразвуковой излучатель, при этом вес датчика не превышает 5 грамм при габаритах, составляющих несколько миллиметров. Частотный диапазон работы ультразвуковых излучателей также выбирается исходя из требований безопасности, отсутствия помех и взаимовлияний на работу другого штатного радиооборудования внутри ПА. Номинальная рабочая частота ультразвуковых излучателей может составлять, например, 40 кГц.
В качестве датчиков температуры могут быть использованы, например, прецизионные температурные сенсоры TMP35, TMP36, TMP37 фирмы Analog Devices или температурные сенсоры, встроенные в современные микроконтроллеры.
В предлагаемом изобретении на ориентируемом приборе требуется разместить ограниченное число элементов, основными из которых являются ультразвуковые излучатели, датчик температуры и радиотрансивер. Малый вес и габариты современных ультразвуковых излучателей, датчика температуры, радиотрансивера обеспечивают минимизацию массы и габаритов элементов, которые необходимо разместить на ориентируемом приборе.
В случае наведения оси чувствительности прибора через иллюминатор ПА на ориентиры, заданные на поверхности планеты, приемники ультразвукового излучения могут быть установлены, например, по периметру используемого для наблюдения иллюминатора ПА при установке ультразвуковых излучателей с параллельностью их осей излучения и оси чувствительности прибора.
В общем случае, ультразвуковые излучатели и приемники ультразвукового излучения размещаются на приборе и на ПА таким образом и в таком количестве, при которых обеспечивается наличие прямой видимости между не менее чем тремя ультразвуковыми излучателями, установленными на приборе, и не менее чем тремя приемниками ультразвукового излучения, установленными на ПА, при любом возможном положении прибора в моменты его ориентирования. При этом в случае, когда приемники ультразвукового излучения устанавливаются с разных сторон от рабочей зоны расположения прибора, датчики температуры, установленные на ПА, размещаются непосредственно рядом с каждым таким приемником.
Опишем технический эффект предлагаемого изобретения.
Предложенные способ и система обеспечивают гарантированное ориентирование (наведение) прибора, свободно перемещаемого относительно пилотируемого космического или летательного аппарата и не имеющего с ним механической связи, по задаваемым ориентирам, при этом обеспечивается наведение любого измерительного прибора, требующего специального ориентирования в моменты выполнения измерений, на ориентиры любого типа и/или по ориентирам любого типа. Также в предложенном изобретении наряду с отсутствием ограничений по перемещению ориентируемого прибора относительно ПА отсутствует необходимость использования обзорных камер наблюдения для поиска цели.
Достижение технического результата в предложенном изобретении обеспечивается:
- в части обеспечения возможности свободного перемещения прибора относительно ПА и исключения механической (в том числе проводной) связи прибора с ПА - использованием импульсных ультразвуковых сигналов, излучаемых не менее чем тремя ультразвуковыми излучателями, размещенными на приборе, принимаемых не менее чем тремя ультразвуковыми приемниками, размещенными на ПА, а также выполнением синхронизации моментов излучения и приема импульсных ультразвуковых сигналов по радиоканалу между радиотрансивером, размещенным на ПА, и радиотрансивером, размещенным на приборе;
- в части исключения зависимости точности ориентирования от изменения скорости распространения ультразвуковых сигналов - измерением температуры в местах размещения ультразвуковых излучателей и в местах размещения ультразвуковых приемников и учетом данных измерений температуры при определении текущей скорости распространения ультразвуковых сигналов между излучателями и приемниками;
- в части обеспечения идентификации сигналов, излучаемого разными излучателями - использованием временного метода разделения, при котором ультразвуковые излучатели посылают импульсные сигналы поочередно с задержкой по времени;
- в части уменьшения габаритов элементов, размещаемых на приборе - использованием в качестве элементов, которые необходимо разместить на приборе, ультразвуковых излучателей и датчиков температуры, которые имеют ничтожную по отношению к прибору массу и габариты;
- в части обеспечения ориентирования любого прибора по ориентирам любого типа - обеспечением возможности использования любых ориентиров, допускающих формализованное математическое описание, в том числе целей на поверхности планеты, на небесной сфере, направлений силовых линий магнитного поля и т.д.
В том числе достижение технического результата в предложенной системе обеспечивается введением предложенных датчиков температуры, радиотрансиверов, блока определения текущего положения ориентира относительно ПА, блока воспроизведения команд на поворот прибора и функциональных блоков, реализующих излучение, прием и описанную обработку ультразвуковых сигналов, а также введением предложенных функциональных связей между блоками и предложенным исполнением уже известных блоков.
Выполненная оценка эффективности применения предлагаемого изобретения на международной космической станции показала, что его использование качественно повысит эффективность выполнения сеансов измерений, выполняемых с использованием разнообразной измерительной аппаратуры, требующей специального ориентирования в моменты выполнения измерений.
Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено по известным технологиям.
Способ качественной оценки биокоррозионных поражений тонкостенных герметичных оболочек из алюминиево-магниевых сплавов при эксплуатации космических аппаратов и суспензия споровых материалов для его реализации
Установка для плазменно-дуговой плавки
Способ определения местоположения негерметичного участка замкнутой гидравлической магистрали, снабженной побудителем расхода и гидропневматическим компенсатором температурного изменения объема рабочего тела
Фотоэлемент приемника-преобразователя лазерного излучения в космосе
Устройство для выбора астрономических объектов наблюдения с орбитального космического аппарата
Орбитальная космическая система
Термокомпрессионное устройство
Способ определения уровня диэлектрического вещества
Герметизированное устройство и способ подвода текучей среды в полость герметизированного устройства с ее герметизацией
Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом
Устройство контроля ориентации пассивных космических аппаратов
Система запуска криогенного жидкостного ракетного двигателя космического объекта
Способ качественной оценки биокоррозионных поражений тонкостенных герметичных оболочек из алюминиево-магниевых сплавов при эксплуатации космических аппаратов и суспензия споровых материалов для его реализации
Установка для плазменно-дуговой плавки
Термокомпрессивное устройство
Способ определения местоположения негерметичного участка замкнутой гидравлической магистрали, снабженной побудителем расхода и гидропневматическим компенсатором температурного изменения объема рабочего тела
Фотоэлемент приемника-преобразователя лазерного излучения в космосе
Устройство для выбора астрономических объектов наблюдения с орбитального космического аппарата
Орбитальная космическая система
Термокомпрессионное устройство

