Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ ПРЕОБРАЗОВАНИЯ ПОЛОСОВЫХ СИГНАЛОВ ОБЪЕКТОМ
Вид РИД
Изобретение
Способ определения нелинейных искажений преобразования полосовых сигналов объектом
Изобретение относится к областям радиотехники и радиоизмерений и может быть использовано для определения искажений, возникающих при прохождении полосовых сигналов произвольной формы через нелинейные устройства.
Известен вычислитель оценки нелинейных искажений (Патент RU №2255342, МПК G01R 23/20, опубл. 27.06.2005 г.), выбранный в качестве прототипа, в котором раскрыт способ оценки нелинейных искажений преобразования сигналов тестируемого устройства, в котором тестовый и выходной сигнал исследуемого устройства сравнивают посредством определения коэффициента пропорциональности путем определения их отношения. Определение коэффициента пропорциональности происходит за счет использования блока деления. На его входы подают сигналы с входа и выхода тестируемого устройства, предварительно прошедшие через полосовые фильтры. При линейном преобразовании тестового сигнала в выходной сигнал коэффициент пропорциональности, полученный на выходе блока деления, представляет из себя постоянное напряжение, в противном случае, можно говорить о нелинейном преобразовании между сигналами, а следовательно, о нелинейных искажениях, вносимых тестируемым устройством.
Недостатком известного технического решения является большая вероятность ошибок при определении нелинейных искажений в случае, когда уровни сигнала близки к нулю, за счет сравнения тестового и выходного сигнала путем определения их отношения, а также за счет отсутствия фазовой коррекции.
Основная техническая задача, решаемая заявляемым изобретением, состоит в создании способа определения нелинейных искажений преобразования полосовых сигналов объектом с малой вероятностью ошибок.
Поставленная задача решается тем, что в способе определения нелинейных искажений преобразования полосовых сигналов объектом, включающем воздействие на объект тестовым сигналом, прием от объекта выходного сигнала, сравнение тестового сигнала с выходным сигналом посредством определения коэффициента пропорциональности, согласно предложенному решению после приема от объекта выходного сигнала определяют прогнозируемый выходной сигнал при линейном преобразовании тестового сигнала путем определения коэффициента пропорциональности и коэффициента фазовой коррекции посредством сравнения амплитуд и фаз тестового и выходного сигналов на временных участках малосигнального режима работы объекта, после чего вычитают из выходного сигнала прогнозируемый выходной сигнал.
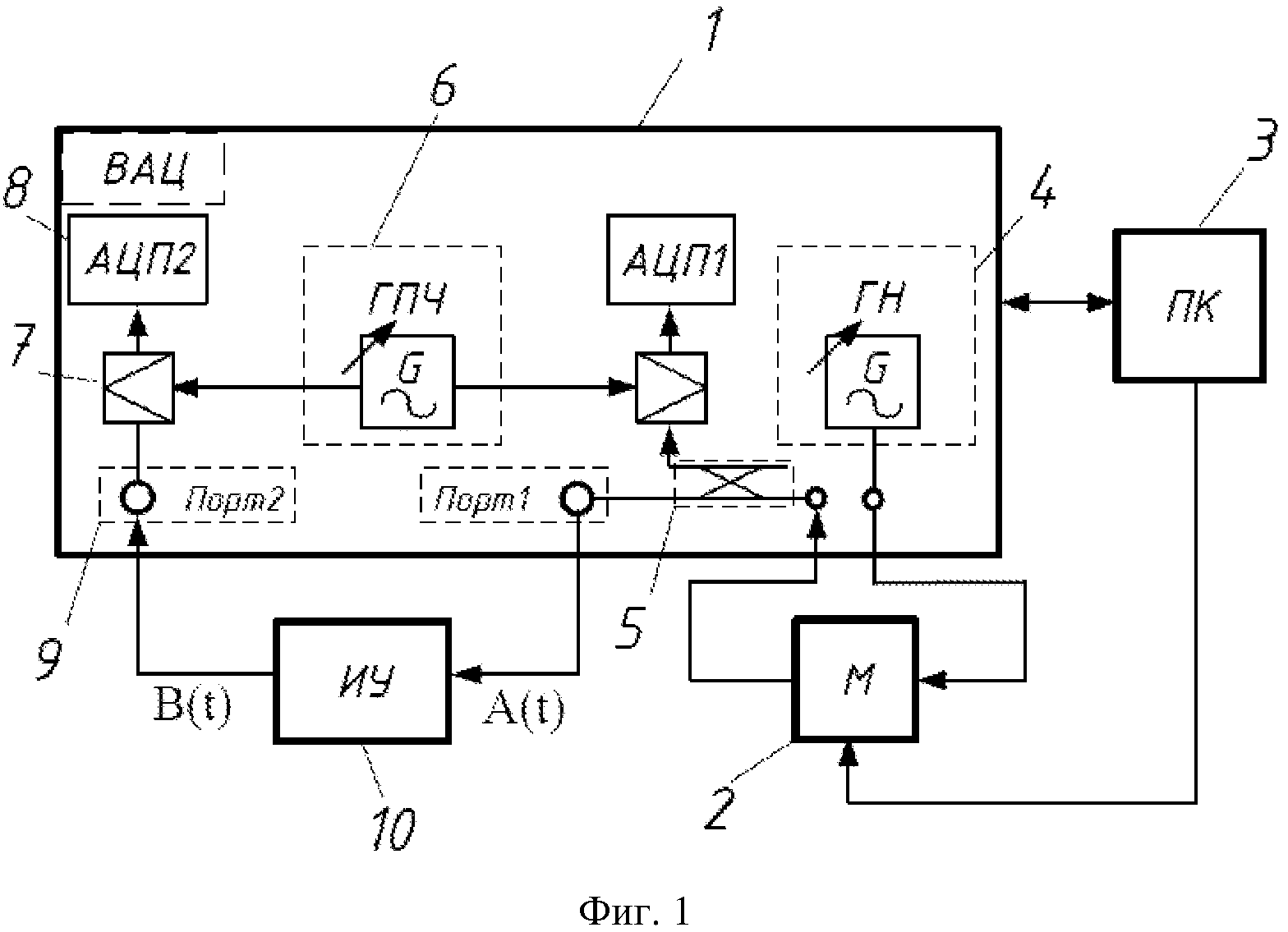
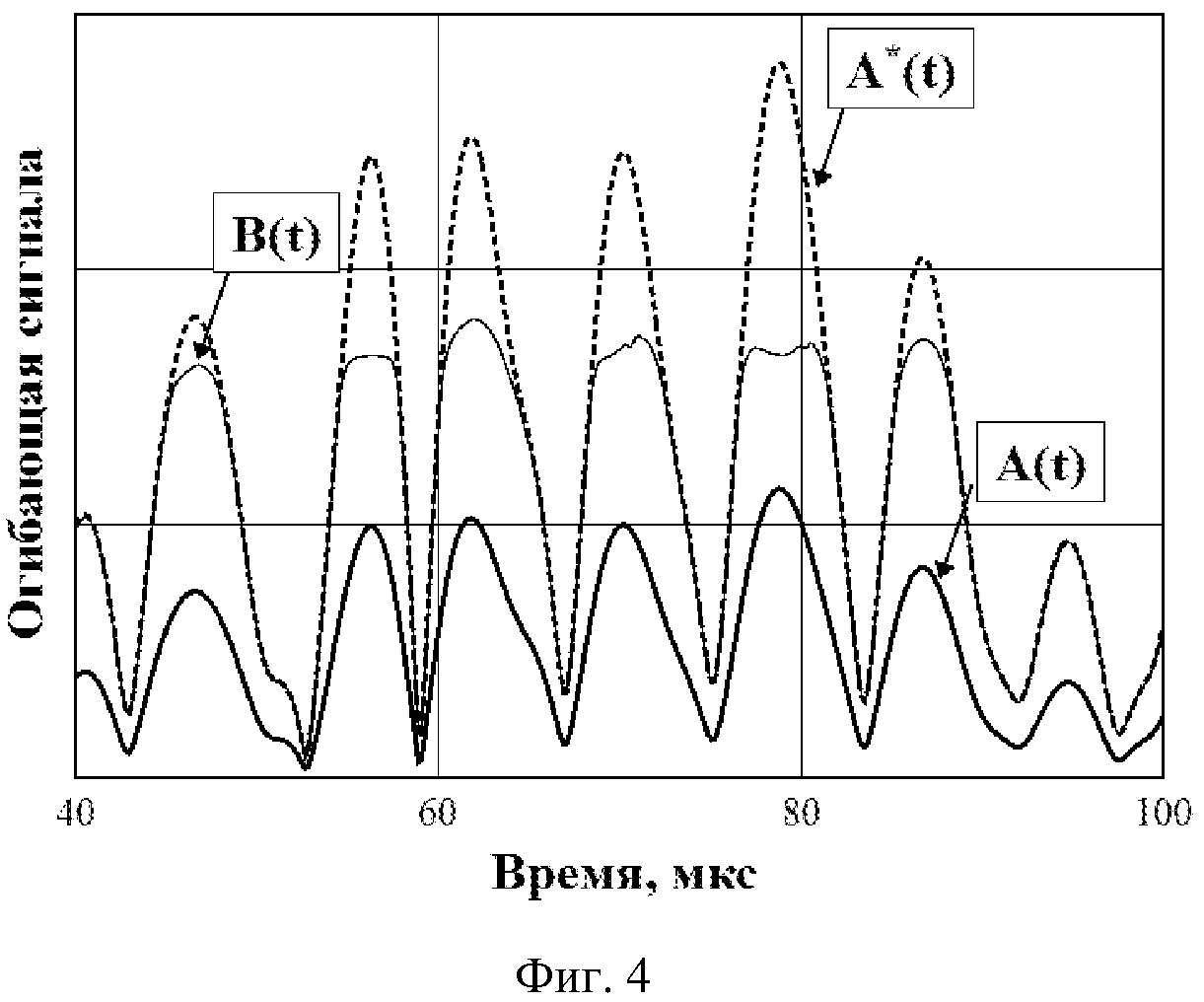
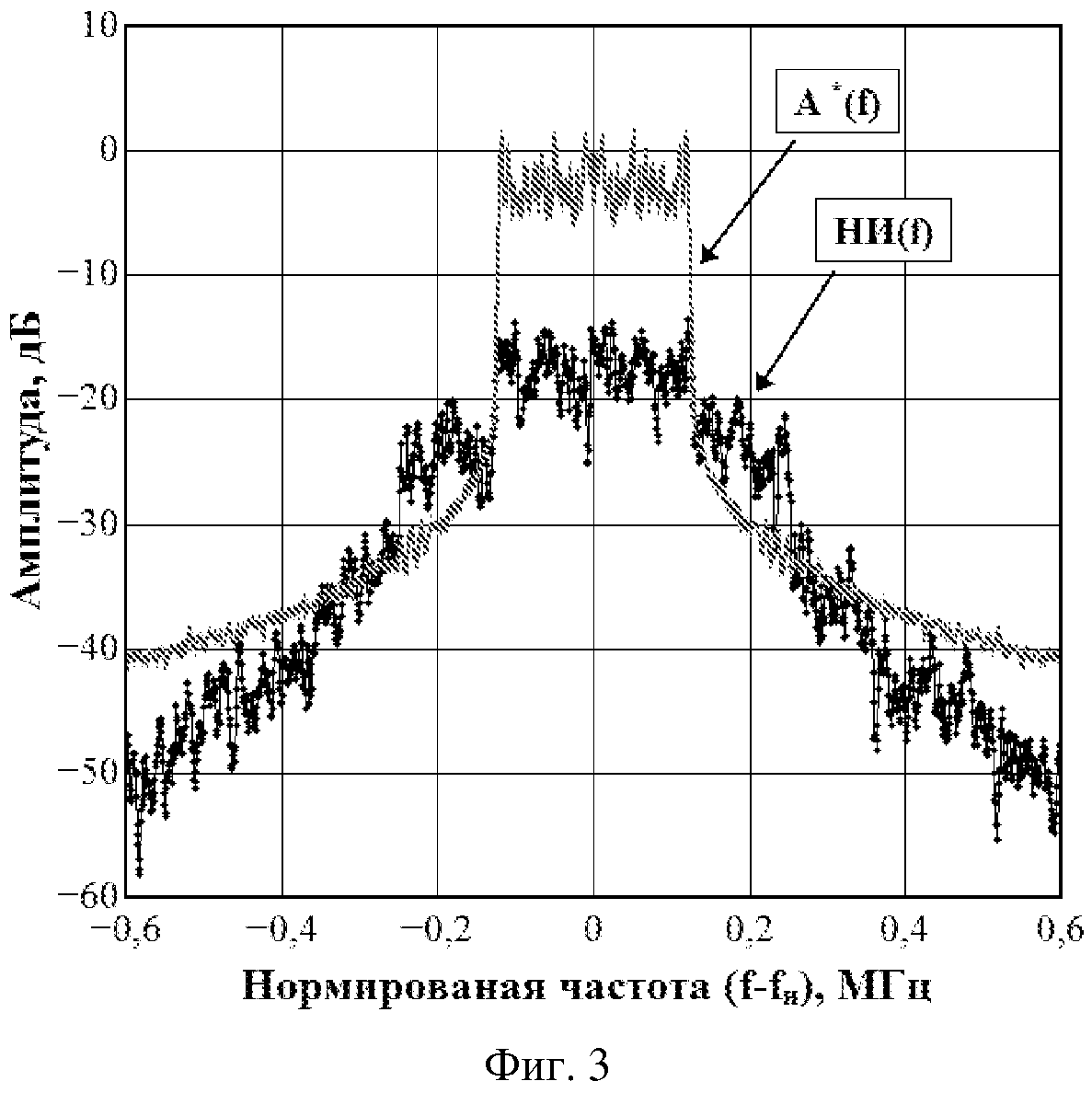
Изобретение поясняется чертежами, где на фиг. 1 представлена структурная схема измерительного комплекса, используемого для экспериментальной реализации заявленного способа; на фиг. 2 - амплитудно-частотные характеристики (АЧХ) тестового А(f) и выходного В(f) сигналов; на фиг. 3 - АЧХ прогнозируемого выходного сигнала А*(f) и АЧХ нелинейных искажений выходного сигнала НИ(f); на фиг. 4 - модули комплексных огибающих тестового А(t), выходного В(t) и прогнозируемого выходного А*(f) сигналов во временной области; на фиг. 2 и фиг. 3 в качестве аргумента f использована нормированная частота, равная разнице частоты сигнала f и частоты несущего колебания fН.
Измерительный комплекс (фиг.1) состоит из векторного анализатора цепей (ВАЦ) 1, квадратурного модулятора (М) 2 и персонального компьютера (ПК) 3. Основными узлами векторного анализатора цепей 1 являются генератор несущего колебания (ГН) 4, ответвитель сигнала 5, генератор промежуточной частоты (ГПЧ) 6, первый и второй смесители 7, первый и второй аналого-цифровые преобразователи (АЦП) 8, первый и второй измерительные порты 9, между которыми подключено исследуемое устройство (ИУ) 10.
Выход генератора несущего колебания 4 подключен к одному из входов квадратурного модулятора 2, выход которого подключен к входу ответвителя сигнала 5, один из выходов которого подсоединен к входу первого измерительного порта 9, а второй - к первому входу первого смесителя 7, выход которого подключен к входу первого аналого-цифрового преобразователя 8. Выходы генератора промежуточной частоты 6 подключены к вторым входам первого и второго смесителей 7. Выход второго измерительного порта 9 подключен к первому входу второго смесителя 7, выход которого подключен к входу второго аналого-цифрового преобразователя 8.
В предложенном варианте измерительного комплекса управление векторного анализатора цепей 1 и квадратурного модулятора 2 осуществляется с помощью персонального компьютера 3. Персональный компьютер 3 может являться внешним устройством, а может являться блоком векторного анализатора цепей 1. Квадратурный модулятор 2 может является как внешним блоком, так и быть встроенным в векторный анализатор цепей 1. Существует возможность модулировать как сигналы, переданные с персонального компьютера 3, так и сигналы, записанные ранее в память квадратурного модулятора 2, таким образом, исключая необходимость связи квадратурного модулятора 2 с персональным компьютером 3. В качестве ответвителя сигнала 5 можно использовать направленные ответвители или резистивные делители.
Сигнал с генератора несущего колебания 4 поступает на квадратурный модулятор 2, где происходит его модуляция, в соответствии с тем, какой сигнал используется в качестве тестового A (t). С квадратурного модулятора 2 тестовый сигнал A (t) поступает обратно в векторный анализатор цепей 1. Часть энергии тестового сигнала A (t) ответвляется при помощи ответвителя сигнала 5, переносится на промежуточную частоту при помощи смесителя 7 с последующей дискретизацией в первом аналого-цифровом преобразователе 8. Оставшаяся часть энергии тестового сигнала A (t) поступает с ответвителя сигнала 5 через первый измерительный порт 1 на исследуемое устройство 10. Выходной сигнал В(t) с исследуемого устройства 10 поступает на второй измерительный порт 2, переносится на промежуточную частоту при помощи смесителя 7 и оцифровывается во втором аналого-цифровом преобразователе 8.
Способ реализуют следующим образом. Выходной сигнал B(t) сравнивают с тестовым А(t) на временных участках малосигнального режима работы исследуемого устройства 10 (фиг. 2). На основе этого сравнения получают коэффициент пропорциональности КПР и коэффициент фазовой коррекции Δφ, в результате чего получают прогнозируемый выходной сигнал А*(t) (фиг. 3):
А*(t)=А(t)·e iΔφ.
Вычитая из выходного сигнала B(t) прогнозируемый выходной сигнал А*(t), определяют уровень нелинейных искажений НИ(t), вносимых исследуемым устройством 10 (фиг. 3).
Для оценки уровня нелинейных искажений, вносимых исследуемым устройством 10, как в полосе информационного сигнала, так и вне его полосы, используют преобразование Фурье, которое позволяет представить полученные данные в частотной области (фиг. 4).
Способ определения нелинейных искажений преобразования полосовых сигналов объектом, включающий воздействие на объект тестовым сигналом, прием от объекта выходного сигнала, сравнение тестового сигнала с выходным сигналом посредством определения коэффициента пропорциональности, отличающийся тем, что после приема от объекта выходного сигнала определяют прогнозируемый выходной сигнал при линейном преобразовании тестового сигнала путем определения коэффициента пропорциональности и коэффициента фазовой коррекции посредством сравнения амплитуд и фаз тестового и выходного сигналов на временных участках малосигнального режима работы объекта, после чего вычитают из выходного сигнала прогнозируемый выходной сигнал.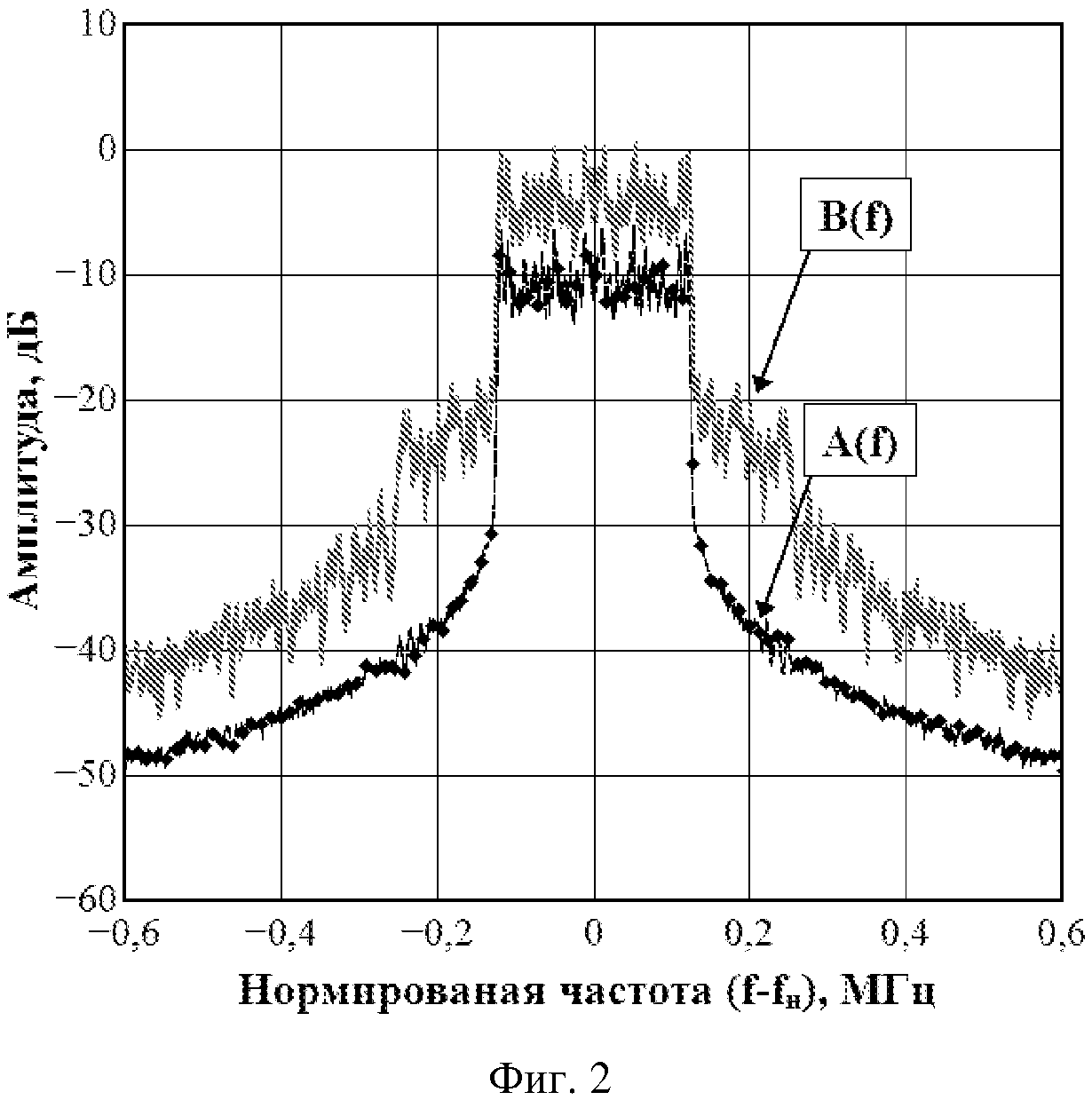
Способ определения поляризационных характеристик среды и устройство для его реализации
Способ маршрутизации для беспроводных мобильных самоорганизующихся сетей передачи данных
Способ цифрового преобразования угла
Делитель мощности
Способ получения перфторэтилизопропилкетона
Цифровой преобразователь угла
Синтезатор частот
Способ определения модуля упругости однородного покрытия
Сверхвысокочастотный транзистор
Установка и способ измерения экранного затухания
Способ определения поляризационных характеристик среды и устройство для его реализации
Способ маршрутизации для беспроводных мобильных самоорганизующихся сетей передачи данных
Делитель мощности
Способ получения перфторэтилизопропилкетона
Цифровой преобразователь угла
Синтезатор частот
Способ определения модуля упругости однородного покрытия
Сверхвысокочастотный транзистор
Установка и способ измерения экранного затухания
Способ формирования радиоголограммы объекта и устройство для его реализации

