Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПАРКОВКЕ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству управления для транспортного средства и к способу помощи водителю транспортного средства при парковке согласно независимым пунктам формулы изобретения.
Уровень техники
Из публикации DE 102005023177 А1 известен способ помощи водителю, предусматривающий регистрацию с помощью датчиков обстановки вблизи транспортного средства. На эту обстановку вблизи транспортного средства наносят заданное конечное положение транспортного средства. Затем на полученном изображении обстановки заданное конечное положение транспортного средства можно переместить или повернуть посредством устройства ввода.
Раскрытие изобретения
Предлагаемое в изобретении устройство управления, охарактеризованное в соответствующем независимом пункте формулы изобретения, имеет, по сравнению с известным решением, то преимущество, что помощь водителю для автоматизации процесса парковки обеспечивается и без измерения датчиками парковочного пространства. Благодаря возможности ручного ввода по меньшей мере одной границы парковочного пространства установление положения парковочного пространства возможно и без сбора информации о нем с помощью датчиков. Далее, благодаря тому, что введенная вручную граница парковочного пространства соотносится соответствующими средствами с текущим положением транспортного средства, может быть вычислен путь движения транспортного средства из его текущего (фактического) положения к месту парковки в пределах парковочного пространства. Это позволяет разработать способ помощи водителю транспортного средства при парковке, не предусматривающий применения дальномерного устройства для измерения парковочного пространства. Далее, например, за счет ввода наблюдаемой впереди границы парковочного пространства с помощью соответствующего средства ввода помощь водителю при парковке может быть предусмотрена и для парковочных пространств, мимо которых транспортное средство еще не проехало для измерения парковочного пространства.
Соответствующие преимущества достигаются и при осуществлении предлагаемого в изобретении способа помощи водителю транспортного средства при парковке.
Мероприятия, приведенные в зависимых пунктах формулы, характеризуют частные и предпочтительные варианты выполнения устройства управления и способа оказания помощи при парковке. Так, целесообразно регистрировать начало парковочного пространства при воздействии на средство ввода. Это позволяет очень просто реализовать ввод границы парковочного пространства, благодаря чему для ввода границы парковочного пространства достаточно лишь однократного воздействия на средство ввода, например нажатия на кнопку.
Целесообразно также предусмотреть измерительное устройство для сбора информации о движении транспортного средства после определения начала парковочного пространства. Это позволяет, измеряя движение транспортного средства вдоль парковочного пространства, измерить длину парковочного пространства. Если транспортное средство дошло до следующего места, в котором, например, вводится другая граница парковочного пространства, то на основании сохраненного в памяти расстояния можно судить о длине парковочного пространства, не прибегая во время такого движения транспортного средства к непосредственному "ощупыванию" парковочного пространства датчиками для измерения размеров парковочного пространства.
Далее, предлагаемое в изобретении устройство управления целесообразно объединить с устройством ввода, имеющим средства для установления соотношения между границей парковочного пространства и положением транспортного средства. Это позволяет получить портативное вычислительное устройство, которое можно иметь при себе в транспортном средстве и которое может служить парковочным ассистентом, применяемым для помощи при парковке также на транспортных средствах, не оснащенных датчиками расстояния.
Далее, такое портативное вычислительное устройство целесообразно оснастить системой определения местоположения для сбора информации о движении транспортного средства. Благодаря этому определение движения транспортного средства может осуществляться, например, и при отсутствии соединения с электронным оборудованием транспортного средства, например с датчиком скорости вращения колеса для измерения пройденного пути.
Целесообразно также снабдить портативное вычислительное устройство дисплеем для отображения положения транспортного средства по отношению к началу парковочного пространства. Благодаря этому пользователь может контролировать на дисплее правильность ввода начала парковочного пространства, например путем контроля совмещения отметки с началом парковочного пространства. При этом также целесообразно предусмотреть возможность коррекции введенного парковочного пространства, например, путем смещения отметки на изображении парковочного пространства.
Кроме того, портативное вычислительное устройство целесообразно оснастить навигационным устройством для вычисления маршрута движения до введенного пункта назначения. Это позволяет, в частности, вычислять маршрут движения до места стоянки (парковки). В этом случае портативное вычислительное устройство может не только выдавать маршрут движения до места стоянки, но и помогать водителю транспортного средства в процессе парковки.
Также целесообразен вариант, в котором отображаемая на дисплее отметка сначала совмещается с границей парковочного пространства, после чего путем воздействия на средство ввода вводится начало парковочного пространства. Это позволяет простым образом определять длину парковочного пространства, вводя начало и конец парковочного пространства. Далее, при известном соотношении между получаемой с помощью вычислений проекцией отметки на обстановку вблизи транспортного средства и положением транспортного средства можно также непосредственно соотносить начало парковочного пространства с текущим положением транспортного средства. Дело в том, что положение отметки известно, и если оно при определенном положении транспортного средства совмещается с отметкой, которую водитель видит на дисплее, то по известному отношению между положением отметки и положением транспортного средства можно путем вычислений определить, в котором положении относительно транспортного средства находится начало парковочного пространства, введенное путем воздействия на средство ввода.
Краткое описание чертежей
Ниже приведено подробное описание вариантов осуществления изобретения, поясняемых чертежами, на которых показано:
на фиг.1 - схематичный вид транспортного средства с предлагаемым в изобретении устройством управления,
на фиг.2 - транспортное средство при осуществлении предлагаемого в изобретении способа,
на фиг.3 - пример изображения, выводимого на дисплей предлагаемого в изобретении портативного вычислительного устройства,
на фиг.4 - блок-схема осуществления предлагаемого в изобретении способа.
Осуществление изобретения
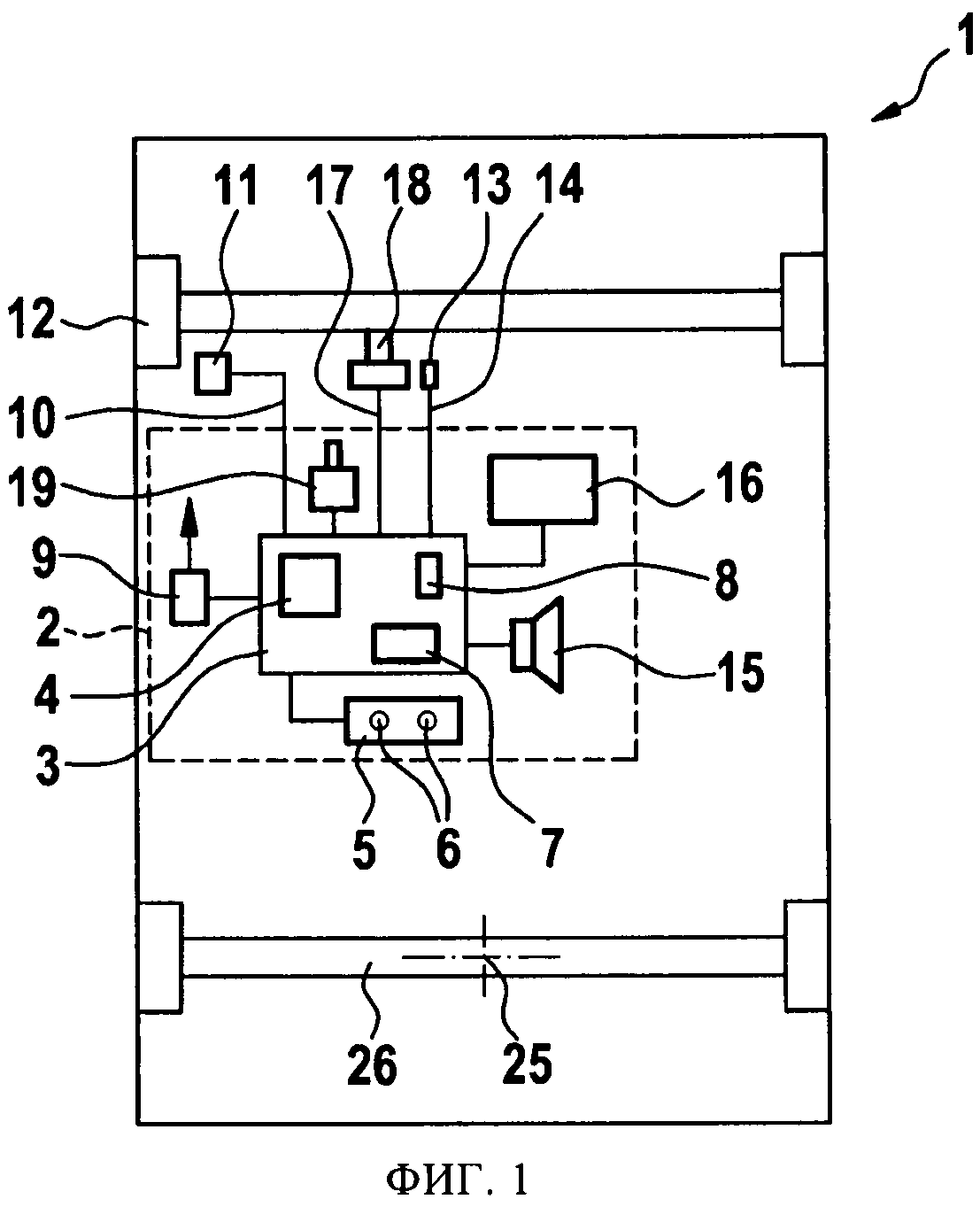
На фиг.1 схематично в виде сверху изображено транспортное средство 1 в виде автомобиля. В рассматриваемом варианте осуществления изобретения в транспортном средстве 1 расположено портативное вычислительное устройство 2, обозначенное прерывистой линией. В другом варианте осуществления изобретения компоненты вычислительного устройства 2 могут быть интегрированы в электронное оборудование транспортного средства и предусмотрены в виде блока, встроенного, например, в щиток приборов или в центральную консоль транспортного средства.
В рассматриваемом варианте осуществления изобретения портативное вычислительное устройство 2 включает в себя устройство 3 управления (контроллер). Устройство 3 управления содержит, в свою очередь, вычислительный блок 4, который служит для вычисления длины парковочного пространства и вычисления пути движения при въезде в парковочное пространство. К устройству 3 управления подключен пульт 5 управления с органами управления, например кнопками 6. В запоминающем устройстве 7 записаны данные, в частности размеры транспортного средства, которые используются для расчета траектории движения к месту парковки, находящемуся в обнаруженном и измеренном парковочном пространстве. Кроме того, сохраненные данные транспортного средства служат также для определения пригодности конкретного парковочного пространства для парковки. В еще одном варианте осуществления изобретения для применения портативного вычислительного устройства на различных транспортных средствах в запоминающем устройстве 7 могут сохраняться размеры различных типов транспортных средств.
Измерение движения транспортного средства, или сбор информации об этом движении, может осуществляться любым способом. В первом варианте осуществления изобретения устройство 3 управления имеет инерциальный сенсор 8, в котором датчик ускорения измеряет ускорение портативного вычислительного устройства 2, а значит, и транспортного средства 1. На основании получаемого сигнала ускорения путем его интегрирования можно определить перемещение транспортного средства в направлении соответствующей координатной оси. В еще одном варианте осуществления изобретения, в дополнение к инерциальному сенсору или вместо него, также можно предусмотреть устройство 9 для определения местоположения по радиосигналам, например GPS-локатор (прибор для определения местоположения в системе глобальной системы позиционирования GPS), чтобы определять текущие положения транспортного средства и на основании разности зафиксированных положений транспортного средства определять перемещение транспортного средства. В еще одном варианте осуществления изобретения также может быть предусмотрен интерфейс 10 сопряжения с датчиком 11 скорости вращения колеса, определяющим, например, вращение колеса 12 транспортного средства 12. В еще одном варианте осуществления изобретения также может быть предусмотрен интерфейс 14 сопряжения с датчиком 13 угла поворота рулевого колеса, обеспечивающий определение текущего угла поворота рулевого колеса.
Инструкции по маневрированию могут выдаваться водителю, например, акустическими средствами (в виде звуковой информации) и/или оптическими средствами (в виде визуальной информации). С этой целью в транспортном средстве предусмотрены, например, динамик 15 и дисплей 16. Так, водителю могут подаваться команды повернуть руль влево, повернуть руль вправо, двигаться вперед или двигаться назад. В еще одном варианте осуществления изобретения может быть предусмотрен интерфейс 17 для автоматического выполнения операций по управлению транспортным средством. Через интерфейс 17, например, может приводиться в действие рулевое устройство 18 транспортного средства, с помощью которого автоматика влияет на угол поворота направляющих колес транспортного средства и тем самым обеспечивает возможность автоматического движения транспортного средства с заруливанием по вычисленному участку пути на место парковки в парковочном пространстве.
Для визуального представления обстановки вблизи транспортного средства может быть предусмотрена камера 19, регистрирующая обстановку вблизи транспортного средства. Получаемое изображение обстановки вблизи транспортного средства может при необходимости передаваться непосредственно с камеры 19 на дисплей 16. В еще одном варианте осуществления изобретения вычислительный блок 4 устройства 3 управления может накладывать на снимаемое камерой 19 изображение отметки для их отображения на дисплее 16.
В еще одном варианте осуществления изобретения портативное вычислительное устройство 2 может быть выполнено таким образом, чтобы вычислительный блок 4, обращаясь к данным, хранящимся в запоминающем устройстве 7 в виде цифровой карты, и с использованием устройства 9 определения местоположения, определял маршрут движения из текущего положения транспортного средства до пункта назначения, например до места стоянки.
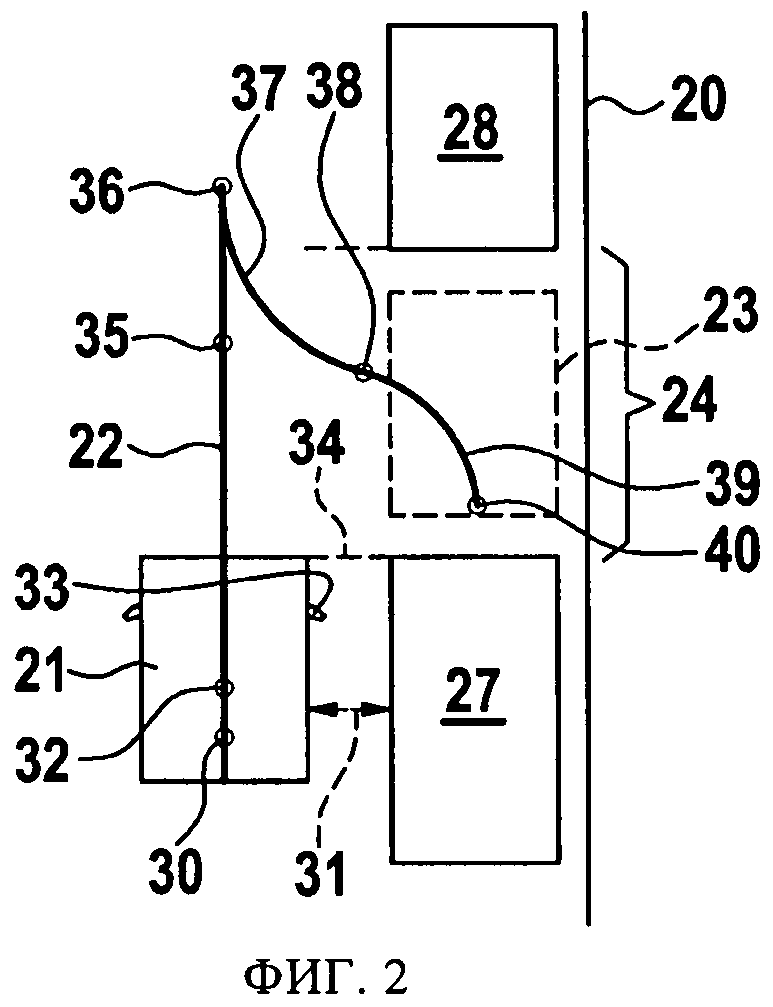
Пример осуществления парковки в парковочном пространстве, вытянутом вдоль края 20 проезжей части, представлен на фиг.2. В еще одном варианте осуществления изобретения, на чертежах не показанном, парковка может соответственно осуществляться в парковочном пространстве, расположенном по отношению к краю 20 проезжей части иным образом, например поперек проезжей части.
На фиг.2 транспортное средство 21 показано в исходном положении. Путь движения транспортного средства 21 из его исходного положения на место 23 парковки в парковочном пространстве 24 изображен с привязкой к центру заднего моста транспортного средства. На фиг.1 номером позиции 25 обозначено соответствующее место на заднем мосту 26 транспортного средства 1.
В изображенной на фиг.2 ситуации водитель транспортного средства 21 обнаружил потенциальное парковочное пространство 24, которое находится перед транспортным средством 21 вдоль края 20 проезжей части и проходит между первым препятствием 27 и другим препятствием 28, расположенным перед ним вдоль края проезжей части, в виде так называемой парковочной ниши. Водитель выбирает по своей оценке расстояние 31 от своего транспортного средства 21 до первого препятствия 27 и движется примерно прямо вперед, приблизительно выдерживая это боковое расстояние до первого препятствия. Это первое расстояние 31 выбирается водителем, исходя из собственной оценки, и составляет, например, около одного метра. При этом водитель подает свое транспортное средство из исходного положения 30 вперед до тех пор, пока в положении 32 выравнивания он не увидит, что транспортное средство 21 своим правым наружным зеркалом 33 заднего вида поравнялось с передним углом первого препятствия, а значит, и с началом парковочного пространства 24. Это положение выравнивания дополнительно представлено на фиг.2 прерывистой линией 34. Ввод начала парковочного пространства и конца парковочного пространства может осуществляться по выравниванию с границей парковочного пространства не только наружного зеркала заднего вида, но и - после соответствующей фиксации этого выравнивания - любой другой части транспортного средства, например переднего бампера.
Теперь водитель создает управляющее воздействие на пульте 5 управления, например, нажимая заданную кнопку 6. Вычислительный блок 4 фиксирует воздействие на соответствующее средство ввода как регистрацию начала парковочного пространства 24. Поскольку водителю было задано приблизительно выдерживаемое расстояние 31 вычислительный блок 4 на основании этого приблизительного расстояния и ввода границы парковочного пространства при выравнивании наружного зеркала заднего вида с передней кромкой первого препятствия 27 может установить соотношение между текущим положением 32 транспортного средства 21 и началом парковочного пространства 24, обозначенным прерывистой линией 34. Затем водитель подает транспортное средство прямо вперед, вдоль показанного на чертеже участка 22 пути, пока не достигнет второго положения 35 выравнивания. В этом втором положении определения парковочного пространства транспортное средство выровнено своим наружным зеркалом 33 заднего вида с началом другого препятствия 28, т.е. с противоположным началом парковочного пространства 24 или - если смотреть от первого препятствия 27 - с концом этого парковочного пространства. Здесь водитель снова воздействует на средство 5 управления. Вычислительный блок 4, запросив у средства для определения пройденного участка пути соответствующую информацию, определяет величину расстояния между первым положением 32 выравнивания и вторым положением 35 выравнивания. Этот процесс может осуществляться, например, путем запрашивания датчика 11 скорости вращения колеса, инерциального сенсора 8 или GPS-локатора 9. В еще одном варианте осуществления изобретения с привлечением датчика 13 угла поворота рулевого колеса или путем отслеживания движения транспортного средства по криволинейной траектории посредством запроса GPS-локатора 9 или инерциального сенсора 8 также может определяться отклонение транспортного средства от прямолинейного участка пути, благодаря чему при определении длины парковочного пространства 24 в случае необходимости можно учитывать, путем соответствующих вычислений, криволинейность пути движения транспортного средства 21 между первым положением 32 выравнивания и вторым положением 35 выравнивания.
Далее, расстояние между положениями 32, 35 выравнивания сравнивается с хранящимися в запоминающем устройстве 7 размерами транспортного средства, в частности с его длиной. Если вычислительный блок 4 установит, что длина парковочного пространства 24 достаточна для парковки, он вычисляет, начиная от второго положения определения парковочного пространства (положения выравнивания) или - если водитель уже проехал немного вперед - от текущего положения транспортного средства, путь движения до места 23 парковки в парковочном пространстве 24 с учетом передней и задней границ парковочного пространства. Возможный путь движения изображен на фиг.2 и включает в себя сначала участок подачи транспортного средства вперед до точки 36 изменения направления движения (точки переключения на движение задним ходом), первый участок 37 движения по дуге окружности или клотоиде с вывернутым вправо рулем до точки 38 перекладки руля и второй участок 39 движения по дуге окружности или клотоиде с вывернутым в обратную сторону рулем.
Теперь, в первом варианте осуществления изобретения вычислительный блок 4 инициирует выдачу водителю инструкций по маневрированию, например выдачу указаний сначала протянуть транспортное средство вперед до точки 36 изменения направления движения, а затем двигаться задним ходом, поворачивая рулевое колесо соответственно, пока транспортное средство не достигнет крайнего положения 40 на месте 23 парковки в пределах парковочного пространства 24. Выдача инструкций по маневрированию может осуществляться с помощью звуковой информации через динамик 15 или с помощью оптических командных сигналов на дисплее 16.
В другом варианте осуществления изобретения водителю могут выдаваться указания лишь относительно подачи транспортного средства вперед и назад, а поворот руля выполняется автоматически. Для этого устройство 3 управления через интерфейс 17 приводит в действие рулевое устройство 18 транспортного средства, обеспечивая автоматическое заруливание из точки 36 изменения направления движения в крайнее положение 40.
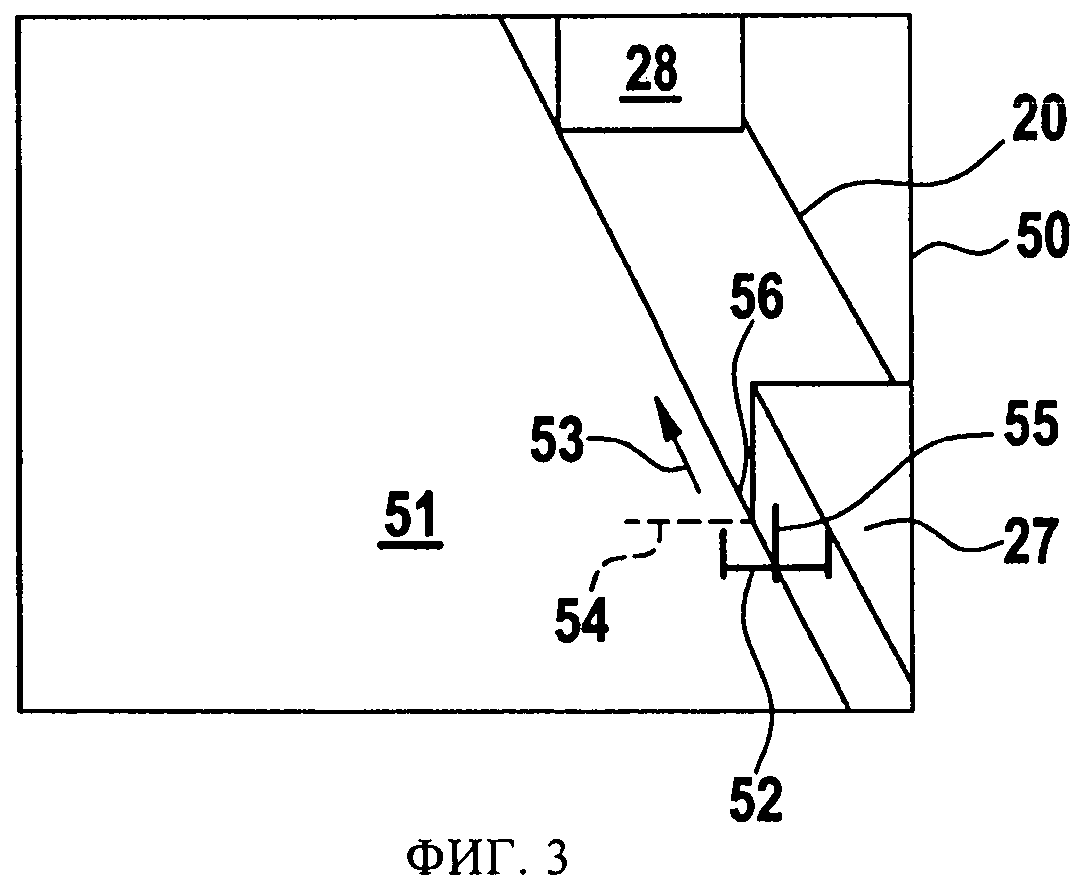
В еще одном варианте осуществления изобретения определение начала и конца парковочного пространства также может осуществляться с помощью камеры 19 и дисплея 16 транспортного средства. Пример выводимого на дисплей 16 изображения 50 приведен на фиг.3. При этом камера 19 направлена на область, находящуюся справа-спереди от транспортного средства 21, а на выводимом изображении 50 изображены первое препятствие 27 и второе препятствие 28. Камера 19 ориентирована при этом таким образом, чтобы также визуализировать, в частности, поверхность 51 края 20 проезжей части. Далее, на выводимом на дисплей изображении 50 отображается отметка 52. Отметка 52 выполнена, например, в виде перекрестия. Когда водитель подает транспортное средство вперед по стрелке 53, отметка 52 перемещается вдоль первого препятствия 27 до ее совмещения на выводимом на дисплей изображении 50 с передней границей первого препятствия 27. В рассматриваемом варианте осуществления изобретения у обозначенного прерывистой линией 54 положения средняя линия 55 отметки 52 совмещается у основания 56 первого препятствия с видимой границей первого препятствия. Теперь пользователь может указать воздействием на средство 6 ввода, что отметка 52 совместилась с началом парковочного пространства, расположенным между первым препятствием 27 и вторым препятствием 28. При этом отметка направлена на точку основания, в которой передняя левая кромка препятствия встречается с поверхностью дорожного полотна. Если транспортное средство достигло положения, в котором неподвижно установленная камера направлена на эту точку, и если видимая для наблюдателя отметка совместилась с этой точкой, то при известных размерах транспортного средства и известном положении камеры на транспортном средстве положение указанной точки относительно камеры, а значит, и относительно транспортного средства, является однозначно определенным. Теперь, после ввода пользователем управляющего воздействия, вычислительный блок 4 может соотнести эту точку с текущим положением транспортного средства. Например, может быть построена карта обстановки вблизи транспортного средства, на которой эта первая точка будет обозначать начало системы координат.
Если теперь транспортное средство проедет дальше в направлении стрелки 53, то при совмещении отметки с задним краем второго препятствия 28 может быть выполнен ввод еще одного управляющего воздействия. Отслеживая движение транспортного средства от начала до конца парковочного пространства, можно рассчитать, путем соответствующих вычислений, как длину парковочного пространства, так и его положение относительно текущего положения транспортного средства. В принципе, посредством соответствующих вычислений строится своего рода карта окружающей обстановки, на которую нанесены положение начала парковочного пространства и положение конца парковочного пространства, а также текущее положение транспортного средства. Далее, рассчитанную соответствующим образом карту окружающей обстановки, можно с помощью соответствующих вычислений выводить на дисплей, изображая эту обстановку в плане, например, согласно изображениям транспортного средства 21 и препятствий 27 и 28. При этом целесообразно, чтобы водителю была предоставлена возможность, при необходимости, корректировать положение своего транспортного средства 21 согласно своему видению обстановки путем ввода соответствующих управляющий воздействий.
В еще одном варианте осуществления изобретения отметку 52, отображаемую на выводимом на дисплей изображении, можно перемещать, в частности в горизонтальном направлении, чтобы зафиксировать отметку действительно у основания первого препятствия 27. Это позволяет, например, компенсировать неточность, связанную с проездом водителя мимо первого препятствия 27 на расстоянии до последнего, отличном от заданного. В еще одном варианте осуществления изобретения отметка может быть выполнена, как это показано на фиг.3, с боковыми метками в виде дополнительных перекрестий. Если с основанием первого препятствия 27 совместилось, например, не среднее или левое перекрестие, а правое перекрестие, то пользователь также может соответственно ввести информацию о соответствии этого перекрестия с основанием препятствия. Тогда на основании положения отметки или выбора одного из перекрестий можно судить о расстоянии от транспортного средства 21 до препятствий, а значит, и до границы парковочного пространства, определяемой проезжей частью.
Вместо точки основания для однозначного определения положения можно также использовать, например, позиционирование относительно бампера, поскольку такие бамперы в большинстве случае располагаются примерно на одной высоте, что также позволяет установить однозначное пространственное отношение.
Камера 19 в одном варианте осуществления изобретения может быть установлена с ориентацией под углом 90º к направлению движения транспортного средства прямо. Вместе с тем, в варианте осуществления изобретения, показанном на фиг.3, камера ориентирована таким образом, что она смотрит практически вперед транспортного средства. Это позволяет вводить начало и конец парковочного пространства, даже если транспортное средство еще не доехало до парковочного пространства или неполностью прошло мимо него.
Если имеется только одно препятствие, у которого необходимо припарковать транспортное средство, то устройство управления может помогать водителю и в случае парковки перед этим единственным препятствием. В этом случае достаточно ввести границу, например, первого препятствия 27, если препятствие 28 отсутствует. Затем пользователь соответственно вводит управляющее воздействие, указывающее на его желание припарковаться перед этим препятствием.
В еще одном варианте осуществления изобретения процесс парковки вдоль пути движения согласно изображению на фиг.2 может отображаться в анимированном представлении.
Далее, если при движении транспортного средства от первой точки 32 ввода транспортное средство, еще не дойдя до второй точки 35 ввода, прошло отрезок пути, длины которого хватило бы для парковки, водителю может быть выдано соответствующее указание на то, что в его распоряжении имеется достаточно большое парковочное пространство. После этого водитель может приступить к парковке уже до измерения всего парковочного пространства.
При пользовании портативным вычислительным устройством пользователь при первом использовании этого устройства в своем транспортном средстве должен снабдить вычислительное устройство данными, необходимыми для вычисления траектории заруливания транспортного средства на желаемое место парковки и для вычисления пригодности парковочного пространства. Ввести необходимо, например, длину транспортного средства, ширину транспортного средства, его колесную базу, а также минимальный радиус поворота. Если устройство управления уже встроено в транспортное средство, то эти данные, как правило, вводятся производителем.
Осуществление предлагаемого в изобретении способа начинается на шаге 60 инициализации, на котором водитель с помощью пульта 5 управления сообщает о своем желании припарковаться вообще. На шаге 60 инициализации также может быть выдан запрос о том, желает ли пользователь припарковаться параллельно направлению движения транспортного средства или поперек направления движения транспортного средства. Намерение водителя используется при последующем расчете процесса парковки и при учете длины парковочного пространства. В этом случае пользователю придется решать самому лишь то, хватит ли для парковки глубины парковочного пространства.
На следующем за инициализацией первом проверочном шаге осуществляется проверка того, оказывалось ли воздействие на орган управления, например нажималась ли кнопка 6, для указания начала парковочного пространства. Если этого еще не произошло, то выполняется обратный переход к первому проверочному шагу 61. Если зафиксировано управляющее воздействие на пульт 5 управления, то на первом установочном шаге 62 определяется начало парковочного пространства. Далее инициируется вычисление пути, пройденного транспортным средством из его текущего положения, так что, начиная от зафиксированного положения начала парковочного пространства, собирается информация о пройденном пути. Затем осуществляется переход ко второму проверочному шагу 63. На втором проверочном шаге 63 осуществляется проверка того, оказывалось ли на пульт 5 управления повторное воздействие для указания конца парковочного пространства, например путем повторного нажатия кнопки 6. Если нет, то выполняется обратный переход ко второму проверочному шагу 63. Если да, то на первом вычислительном шаге 64 вычисляется длина парковочного пространства между установленным началом и установленным концом парковочного пространства. Для этого используется, например, разность положений датчика пути или разность положений, определенная по локатору (прибору определения местоположения). Затем выполняется переход к третьему проверочному шагу 65, на котором выясненная длина парковочного пространства сравнивается с длиной транспортного средства. Если длина транспортного средства плюс дополнительное расстояние на маневрирование превышает выясненную длину парковочного пространства, например, на один метр, то это парковочное пространство рассматривается как непригодное для парковки, и осуществление способа заканчивается на следующем шаге 66 окончания. Пользователю выдается соответствующая информация. Если же парковочное пространство является большим, а значит, пригодным для парковки, то водителю может быть указано на это акустическими и/или оптическими средствами. Автоматически или по команде водителя осуществляется переход с третьего проверочного шага 65 на вычислительный шаг 67. На этом вычислительном шаге 67 рассчитывается путь движения транспортного средства из его текущего положения до подходящего места парковки в пределах парковочного пространства. Затем на шаге 68 выдачи указаний осуществляется выдача водителю транспортного средства инструкций по маневрированию для заруливания в парковочное пространство, или процесс парковки выполняется, по меньшей мере частично, автоматически. При достижении крайнего положения 40 в пределах парковочного пространства осуществление способа завершается на шаге 69 окончания.
Управляющий клапан топливной форсунки
Насос высокого давления
Топливная форсунка
Насосный узел для подачи топлива, предпочтительно дизельного топлива, в двигатель внутреннего сгорания
Щетка стеклоочистителя, прежде всего очистителя стекол автомобилей, а также способ ее изготовления
Ручная машина
Ручная машина с приводным двигателем и передаточным механизмом
Щетка стеклоочистителя
Способ изготовления твердооксидного топливного элемента
Способ прямой дискретизации сигналов нескольких радиодиапазонов и блок управления для его осуществления
Технологическая машина
Система предупреждения столкновений для транспортного средства
Соединительный палец, технологическая машина и способ изготовления такого соединительного пальца
Электродинамический тормоз для универсального электродвигателя
Щетка стеклоочистителя бескаркасной конструкции
Система подачи топлива из бака в двигатель внутреннего сгорания
Исполнительный механизм и выполненная с подобным исполнительным механизмом клапанная система
Ультразвуковой проточный датчик для применения в текучей среде
Топливная форсунка
Технологическая машина с защитным кожухом

