Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ПОЗИЦИОНИРОВАНИЯ ОБОРУДОВАНИЯ С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ ДЛЯ ТУРБОМАШИНЫ С ИСПОЛЬЗОВАНИЕМ ГИДРОЦИЛИНДРА С ОТНОСИТЕЛЬНЫМ ИЗМЕРЕНИЕМ
Вид РИД
Изобретение
Настоящее изобретение относится к оборудованию с изменяемой геометрией и к управлению его позиционированием и, в частности, к оборудованию с изменяемой геометрией, установленному на турбомашинах.
Многие виды оборудования на турбомашине могут быть установлены подвижно с возможностью вращения или поступательного перемещения, будь то, например, статорные лопатки с изменяемым углом установки, которые более или менее ориентированы в направлении потока воздуха компрессора высокого давления, разгрузочные вентили, которые открыты или закрыты для увеличения, если это необходимо, предела помпажа компрессора, либо также подвижные лопатки компрессора или вентилятора с изменяемым шагом.
Эти виды оборудования с изменяемой геометрией перемещаются кинематикой, приводимой гидроцилиндрами, или любым другим приводом, как показано в заявке на патент ЕР1724472 Заявителя, и их положение определяется законом, устанавливающим отношение между ходом гидроцилиндра и искомым положением для рассматриваемого оборудования. Кроме того, известно устройство контроля положения оборудования с изменяемой геометрией, как описано в заявке ЕР 1988258, в которой положение оборудования определяется датчиком конца хода.
Положением зачастую управляет система автоматического регулирования, настроенная на требуемое положение. Положение штока гидроцилиндра известно благодаря датчику типа LVDT (измерительный преобразователь линейных перемещений или линейно регулируемый датчик перемещений), который отслеживает перемещения штока гидроцилиндра и передает их устройству управления перемещением кинематики. Эти датчики обычно являются датчиками полного перемещения, то есть они определяют положение штока гидроцилиндра относительно неподвижной опорной точки, соединенной с корпусом гидроцилиндра или собственно с оборудованием.
Такая система автоматического регулирования обычно настроена на положение штока гидроцилиндра, а не на положение рассматриваемого оборудования. Ход поршня может быть хорошо управляем, но соответствовать ложному положению оборудования, если, например, появляются зазоры вследствие износа в процессе срока службы машины, либо вследствие общего разрушения, например, поломки кинематики, расположенной на выходе гидроцилиндра.
Например, часто встречается износ в оправках для крепления статорных лопаток с изменяемым углом установки (или VSV, изменяемая лопатка статора) и, следовательно, появление значительного зазора в их положении и неточность в управлении этим оборудованием.
Неточность в установке существующих систем вынуждает разработчиков турбомашин предусматривать пределы в расчете параметров закона управления видами оборудования с изменяемой геометрией. Они должны, на практике, принимать в расчет отклонение, которое может появиться в процессе срока службы оборудования между его реальным положением и положением, которое может показать система управления. В частном случае оборудования компрессора, для которого при работе следует защититься от явления помпажа, соответствующие пределы достигаются путем адаптации компрессора, не являющейся оптимальной, при этом рабочая точка выбирается наиболее удаленной от линии помпажа и не должна приниматься во внимание при учете будущих износов и смещений, ассоциированных с появляющейся вследствие этого неточностью в угле установки лопаток.
Кроме того, в процессе монтажа оператор должен следить за точной установкой оборудования для исключения большего увеличения неточности при операционном позиционировании. Такая операция требует значительного количества времени и может вызвать возможные ошибки при установке.
Задачей настоящего изобретения является исключение указанных недостатков путем разработки устройства для позиционирования оборудования с изменяемой геометрией и его соответствующей системы управления, которая не обладает некоторыми из недостатков существующих устройств и, в частности, не является чувствительной к установке этих видов оборудования. В нем предлагается способ установки соответствующего устройства.
Для решения задачи предложено устройство управления позиционированием оборудования с изменяемой геометрией турбомашины, содержащее вычислитель, привод упомянутой изменяемой геометрии, управляемый вычислителем и кинематику, при этом упомянутый привод содержит подвижную конструкцию, включающую измерительный датчик ее удлинения, причем упомянутая кинематика связана одной из своих сторон с местом зацепления упомянутой подвижной конструкции, а другой из своих сторон - с местом соединения, при этом место соединения перемещается под действием привода вдоль хода, ограниченного упором, и кинематика является упруго деформируемой под действием привода, когда место соединения находится на упоре, отличающееся тем, что команда на удлинение, выдаваемая вычислителем упомянутой подвижной конструкции, определяется как разность по отношению к значению величины удлинения подвижной конструкции, которая соответствует контакту места соединения с упором.
При использовании в качестве опорной величины удлинения, соответствующей упору, избавляются от зазоров, которые могут существовать в кинематике, и можно определить возможные разрушения в кинематике. Можно также уменьшить пределы, способные гарантировать хорошую работу турбомашины.
Предпочтительно, чтобы вычислитель определял величину удлинения подвижной конструкции, которая соответствует контакту места соединения с упором при осуществлении подачи на привод, по меньшей мере, одной команды на перемещение его подвижной конструкции за пределами положения, соответствующего установке на упор места соединения.
Направление привода за упор осуществляется путем изменения, по меньшей мере, одной из характеристик работы гидроцилиндра при переходе на этот упор, что позволяет определить реальный приход на упор места соединения изменяемой геометрии. Исходя из знания реальной величины удлинения, соответствующего контакту на упоре, и величины, которая фигурировала в логике команды, имеется возможность корректировать логику команды и, следовательно, уменьшить установление пределов в процессе разработки логики команды.
Предпочтительно, чтобы устройство содержало средство измерения усилия, развиваемого приводом, а упомянутый вычислитель был предназначен для сбора величин изменений в зависимости от хода пары сил {удлинение подвижной конструкции - усилие, выдаваемое приводом} в процессе перемещения подвижной конструкции в ответ на команду, подаваемую упомянутой подвижной конструкцией за пределы положения, соответствующего установке на упор места соединения.
Предпочтительно, чтобы упомянутый вычислитель был предназначен для определения точки изгиба на кривой, иллюстрирующей изменение усилия, выдаваемого приводом в зависимости от времени.
Предпочтительно также, чтобы упомянутый вычислитель был предназначен для корректировки в его логике управления позиционирования кинематики удлинение подвижной конструкции, соответствующее контакту места соединения с упором на величину, соответствующую усилию, выдаваемому приводом в упомянутой точке изгиба.
Можно также равномерно корректировать, например, в процессе каждого использования логику управления оборудованием и реагировать с момента появления отклонения, вызванного износом или разрушением кинематики.
Изобретение касается также способа управления позиционированием с помощью кинематики оборудованием с изменяемой геометрией турбомашины путем удлинения, задаваемого подвижной конструкцией привода, при этом упомянутый привод снабжен датчиком измерения удлинения и измерения усилия, развиваемого приводом, причем упомянутая кинематика связана одним из своих концов с местом зацепления упомянутой подвижной конструкции, другим концом - с местом соединения упомянутого оборудования, при этом место соединения перемещается под воздействием привода вдоль хода, ограниченного упором, а кинематика выполнена упруго деформируемой под воздействием привода, когда место соединения находится на упоре, включающего следующие этапы:
а) подачу приводу команды на перемещение его подвижной конструкции за положение соответствующей установки на упор места соединения,
b) измерение величины, по меньшей мере, пары сил {удлинение подвижной конструкции - усилие, развиваемое приводом} в процессе перемещения упомянутой подвижной конструкции,
с) расчет величины удлинения подвижной конструкции, которая соответствует контакту места соединения с упором исходя из измерения усилия, выдаваемого приводом, и, по меньшей мере, измеренной пары сил,
d) определение заданного удлинения при использовании подвижной конструкции с помощью его отклонения вышерассчитанной величины.
Предпочтительно, чтобы на этапе b) производился сбор величин изменений в зависимости от периода пары сил {удлинение подвижной конструкции - усилие, выдаваемое приводом} в процессе перемещения подвижной конструкции в результате получения команды на перемещение упомянутой подвижной конструкции за положение, соответствующее установке на упор места соединения, а на этапе с) определялась точка изгиба на кривой, иллюстрирующей изменение усилия, выдаваемого приводом, в зависимости от времени.
Изобретение также касается турбомашины, снабженной оборудованием с изменяемой геометрией, позиционирование которого управляется вышеописанным устройством, а также вычислителя турбомашины, в который встроен модуль расчета, реализующий один из вышеописанных способов.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
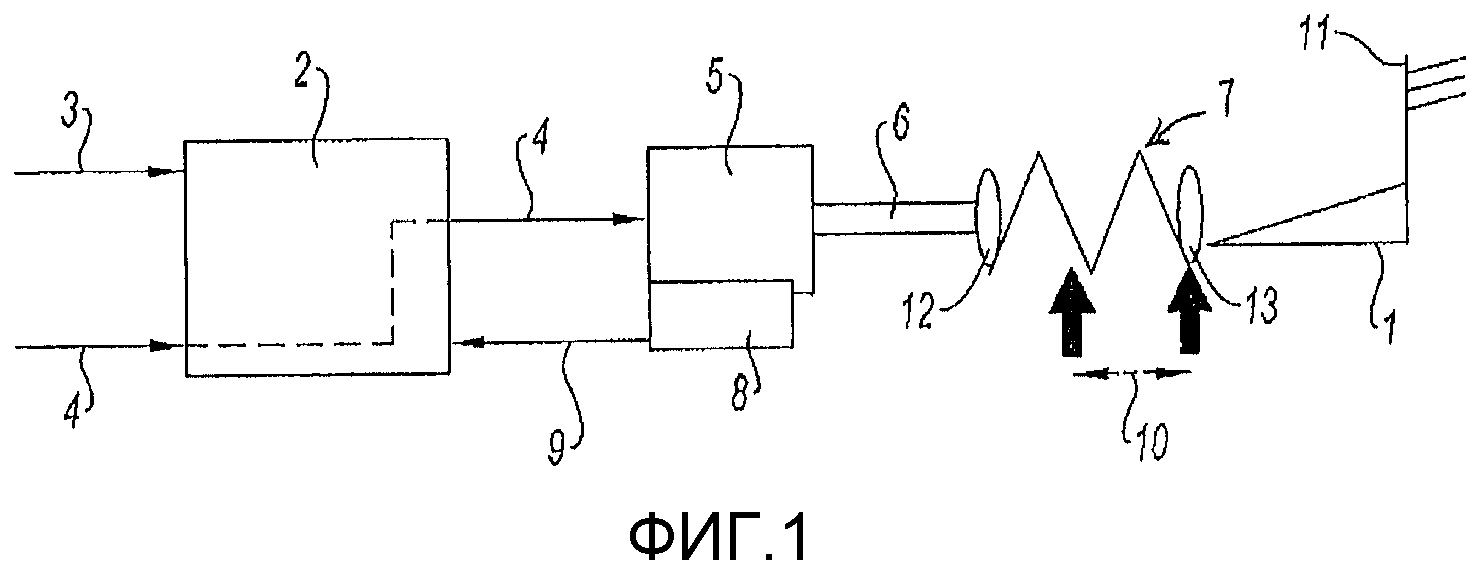
- Фиг.1 схематично изображает цепь управления оборудованием с изменяемой геометрией в соответствии с вариантом осуществления изобретения;
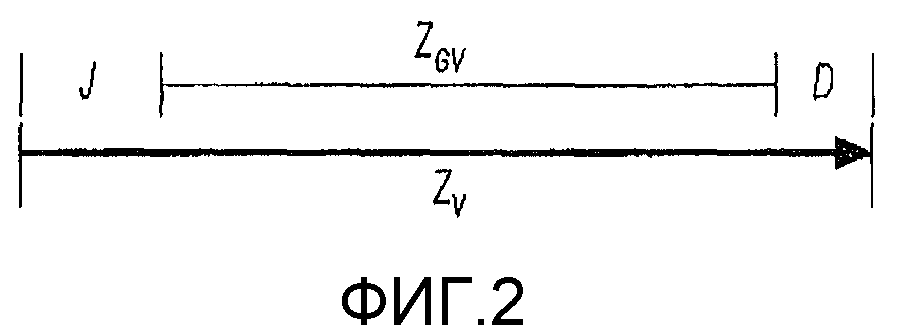
- Фиг.2 схематично изображает сравнительный вид хода оборудования с изменяемой геометрией и подвижной конструкции гидроцилиндра, который приводит в движение это оборудование;
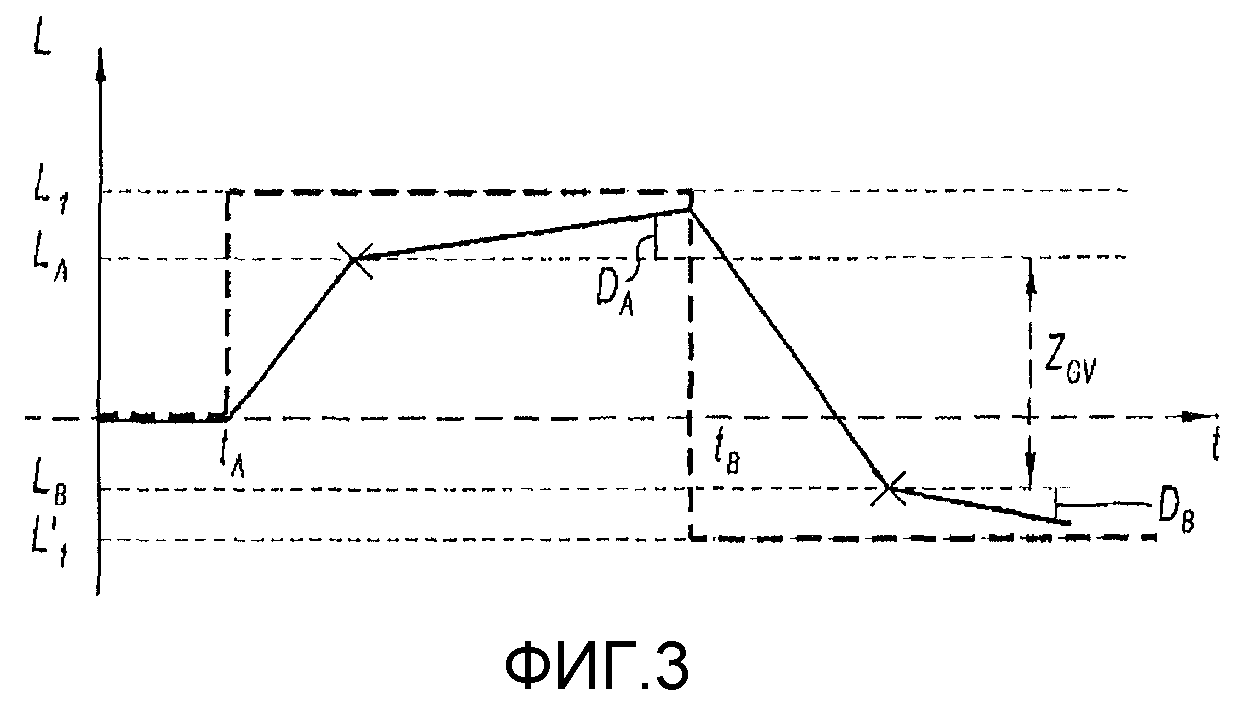
- Фиг.3 изображает вид, представляющий, с одной стороны, команду на перемещение оборудования с изменяемой геометрией по изобретению и, с другой стороны, перемещение, эффективно осуществляемое оборудованием в ответ на эту команду;
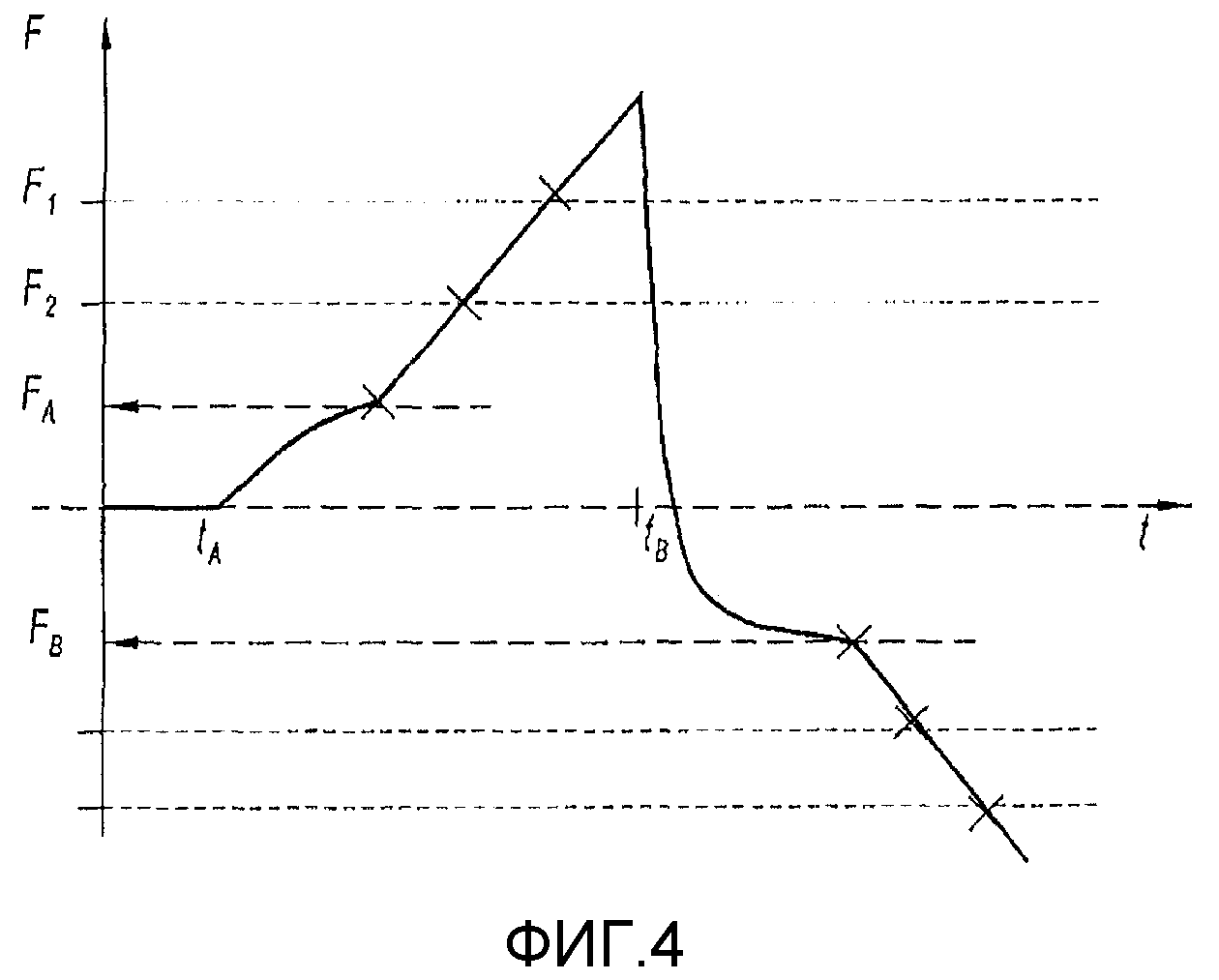
- Фиг.4 изображает вид усилий, прикладываемых управляющим гидроцилиндром к оборудованию с изменяемой геометрией по изобретению в процессе перемещения, управление которым показано на фиг.3.
На фиг.1 представлена цепь управления 1 с изменяемой геометрией, включающая вычислитель 2, который получает по командной линии, обозначенной позицией 3, данные об искомом положении оборудования 1 и которые воздействуют на мощность, выдаваемую линией 4 подачи мощности на привод типа гидроцилиндра 5. На выходе вычислителя 2 линия мощности 4 приводит в движение гидроцилиндр 5 и его подвижную часть 6 типа штока гидроцилиндра для изменения посредством кинематики 7 положения оборудования 1 с изменяемой геометрией. Шток 6 гидроцилиндра связан с кинематикой на уровне места 12 зацепления, и кинематика перемещает оборудование 1 посредством места 13 соединения. Датчик 8 постоянно измеряет положение штока 6 гидроцилиндра и передает данные вычислителю 2 по цепи 9 обратной связи. Вычислитель рассчитывает мгновенные значения расхождения между положением, которое фиксирует датчик 8, и положением, которое соответствует при номинальной работе кинематики 7 искомому положению, и, следовательно, он воздействует на линию мощности 4 для уменьшения этого расхождения и его постепенного приведения к нулю.
Следует отметить, что цепь управления в данном случае описана для варианта воздействия цепи обратной связи системы автоматического регулирования на положение штока гидроцилиндра, но изобретение, кроме того, может быть также осуществлено с использованием цепи прямой связи, не содержащей цепи обратной связи системы автоматического регулирования.
Вследствие износов, которые появляются со временем либо вследствие возможного разрушения, в кинематике 7 появляется зазор 10, который вызывает отклонение в том или ином направлении между реальным положением оборудования 1 и положением, требуемым для штока 6 гидроцилиндра.
На фиг.1 изображен также упор 11, соответствующий одному из положений конца хода оборудования 1 с изменяемой геометрией. Упорами такого типа могут быть, например, упоры на кожухе высокого давления для колец кинематики VSV, упоры на промежуточном кожухе для выходов разгрузочных клапанов компрессоров либо также максимальные и минимальные упоры для шага лопасти вентилятора. Наличие, по меньшей мере, одного упора на длине хода места присоединения оборудования является основным элементом для воплощения изобретения.
Фиг.2 иллюстрирует сравнительное перемещение места 12 зацепления штока 6 гидроцилиндра на кинематике 7 и реального перемещения места 13 соединения с оборудованием 1 в процессе привода оборудования 1 для его перемещения из одного положения на одном из его упоров в другое положение в другой упор. В то время как шток гидроцилиндра перемещается по длине хода Zv, место 13 соединения вначале не перемещается, и это видно на эквиваленте хода J, соответствующего выборке зазора 10. Как только зазор 10 кинематики оказывается выбранным, оборудование совершает эффективный ход ZGV, то есть ход от одного упора до другого. На фиг. 2 представлена длина хода гидроцилиндра ZV, превышающая эффективную длину хода, то есть длину хода, которая соответствовала бы при номинальных условиях кинематики перемещению ZG оборудования 1 между этими упорами. Длина хода, требуемая для штока 6 гидроцилиндра, превышает его эффективную длину хода со стороны упора конца хода, при этом гидроцилиндр 5 в конце хода опирается на кинематику 7, которая не может больше перемещаться вперед из-за упора 11, что вызывает в результате механическую деформацию этой кинематики. После этого место зацепления 12 гидроцилиндра продолжает перемещаться на длину D, которая обусловлена упругостью деталей, образующих кинематику 7.
Фиг.3 и 4 иллюстрируют перемещение L (фиг.3) места зацепления 12 штока 6 гидроцилиндра и усилие F (фиг.4), развиваемое гидроцилиндром 5 в процессе управления перемещением оборудования 1 из данного отправного положения к первому упору 11 конца хода, обозначенного позицией А, к которому оборудование направляется давлением гидроцилиндра 5; за этим первым перемещением следует второе перемещение, которое осуществляется от первого упора А ко второму упору, обозначенному позицией В, причем гидроцилиндр 5 действует, в данном случае, в направлении, противоположном предыдущему.
На фиг.3 представлены две кривые, одна из которых (штриховая) отражает положение, запрашиваемое вычислителем 2, а другая (сплошная) отображает реальное положение места 12 зацепления гидроцилиндра при упомянутом выше перемещении. Команда вначале равняется нулю, то есть от гидроцилиндра не требуется никакого действия, который оставляет, таким образом, место соединения 13 в положении, в котором оно находилось до этого. После команды на маневрирование положения оборудования 1, полученной вычислителем по командной линии 3, вычислитель передает на гидроцилиндр 5 в момент tA команду на перемещение места 13 соединения к первому упору А и оставаться там в течение заданного времени tB-tA. По окончании времени tB вычислитель 2 передает команду на перемещение места 13 соединения из первого упора А ко второму упору В.
В момент tA место 12 зацепления перемещается из своего первоначального положения к упору 11 со скоростью, соответствующей скорости втягивания штока 6 гидроцилиндра в гидроцилиндр 5. Место 13 соединения перемещается настолько же, как только возможный зазор 10 был устранен. Когда место 13 соединения подходит к первому упору А, гидроцилиндр 5 продолжает свое движение до времени tB и место 12 зацепления его штока продолжает перемещение на расстояние DA вследствие деформации, связанной с упругостью кинематики 7.
В момент времени tВ в гидроцилиндре 5 давление меняет направление и место 13 соединения теперь управляется для прихода ко второму упору В. Место 13 соединения в первый момент времени всегда остается в контакте с упором А, при этом место 12 зацепления штока возвращается в положение ослабления опорного усилия в этот упор, устраняя ослабление DA, которое является следствием упругости кинематики 7. Шток 6 гидроцилиндра продолжает втягиваться, выбирая вначале зазор J, который возможно существует в этом направлении в кинематике, затем перемещает место 13 соединения к второму упору В. Так же как и ранее, когда место 13 соединения достигало упора В, шток 6 гидроцилиндра 5 продолжает свой ход на расстояние DB, связанное с упругостью кинематики 7.
Параллельно усилие, оказываемое гидроцилиндром, как проиллюстрировано на фиг.4, изменяется от tA, оставаясь первоначально относительно слабым и равным величине, необходимой для перемещения кинематики 7 и оборудования 1 с изменяемой геометрией. Как только место 13 соединения достигает первого упора А, вычислителем 2 направляется команда на продолжение перемещения гидроцилиндра для достижения положения за упором. Усилие, оказываемое гидроцилиндром, таким образом, резко повышается как реакция на противодействие, оказываемое упором. Кривая по фиг.4 отображает, таким образом, изгиб, резко выраженный в момент tA.
Начиная с момента tB усилие, оказываемое гидроцилиндром, резко уменьшается, затем осуществляется в противоположном направлении второго упора В.
Далее будет описано устройство и способ, позволяющие преодолеть проблемы износа в управлении видами оборудования с изменяемой геометрией турбомашины, и вытекающие из этого отклонения в измерениях, а также позволяющие определить возможные нарушения в цепи управления этими видами оборудования.
Следует отметить, что обычно в известном уровне техники датчиком 8 является датчик измерения абсолютной величины, который определяет удаления штока 6 гидроцилиндра относительно опорной точки. Этой опорной точкой может, например, являться корпус гидроцилиндра, при этом измерение удаления касается, таким образом, длины штока, который выдвигается из упомянутого штока. В изобретении, напротив, измерение удаления штока гидроцилиндра при использовании осуществляется относительно заведомо неизвестного положения, которое определяется при осуществлении упора оборудования 1.
В изобретении предлагается, прежде всего, размещать один или, предпочтительно, два механических упора наиболее близко к изменяемым геометриям и затем при использовании в процессе срока службы двигателя корректировать регулярно или периодически положение штока 6 гидроцилиндра, направляя оборудование 1 на один из этих упоров.
Методика заключается в определении значения удаления штока гидроцилиндра, которое соответствует положению упора 11, в который упирается место 13 соединения оборудования 1 с изменяемой геометрией, принятии этого значения в качестве опорного для удлинений, которые будут истребованы вычислителем 2 у гидроцилиндра 5, и определении в дальнейшем команды положения штока 6 поршня по разности относительно этой опорной величины.
После того как эта опорная величина определена, положение, которое принимает шток 6 гидроцилиндра, становится независимым от зазоров, которые могут существовать в кинематике. Таким образом, получают совершенное управление положением оборудованием 1. Следовательно, больше не существует необходимости в принятии пределов компенсации износов, как это было в известном уровне техники. Кроме того, становится возможным определение разрушения приводной цепи, так как в этом случае оборудование 1 никогда не достигнет своего упора и никакое удаление штока гидроцилиндра не будет соответствовать положению оборудования на упоре 11.
Для того чтобы знать положение штока гидроцилиндра, которое соответствует контакту оборудования 1 с упором 11, оператор направляет по управляющей линии 3 команду на перемещение в положение L1, произвольно находящееся над выбранным упором 11. Вычислитель 2 распознает в процессе перемещения гидроцилиндра одновременно усилие F1, передаваемое гидроцилиндром 5, благодаря величине, задаваемой в линию мощности 4, и положение L1 штока 6 гидроцилиндра от датчика 8. Таким образом, получают возможность воспроизведения кривой, изображенной на фиг.4.
Анализ этой кривой позволяет определить точку изгиба FA, которая соответствует удалению LA гидроцилиндра, при котором оборудование 1 находится на упоре 11. Именно эта величина принимается далее в качестве опорной для различных положений штока гидроцилиндра.
Таким образом, получают устройство и способ, которые позволяют избавиться от износов, появляющихся в кинематике 7, и определить возможные разрушения в этой кинематике.
Несмотря на то что изобретение было описано в отношении частного варианта осуществления, очевидно, что оно включает все технические эквиваленты, а также технические эквиваленты описанных средств, а также их комбинаций, если последние не выходят за рамки изобретения.
Устройство удаления масла и турбомашина, содержащая это устройство
Подвеска силовой установки к конструктивному элементу летательного аппарата
Крепление многоконтурного турбореактивного двигателя к летательному аппарату
Канал охлаждения, выполненный в стенке
Устройство и способ кругового деформирования круглой детали, в частности, выпускного картера газотурбинного двигателя
Полный вал газотурбинного двигателя и газотурбинный двигатель, содержащий по меньшей мере упомянутый вал
Разделенный на секторы сопловой аппарат, турбина низкого давления и турбомашина, содержащие такой сопловой аппарат
Промежуточный картер турбореактивного двигателя и турбореактивный двигатель
Камера сгорания турбомашины со спиральной циркуляцией воздуха
Способ алюминирования из паровой фазы металлической детали газотурбинного двигателя, донорская рубашка и лопатка газотурбинного двигателя, содержащая такую рубашку
Инжектирование воздуха в тракт компрессора газотурбинного двигателя
Устройство удаления масла и турбомашина, содержащая это устройство
Подвеска силовой установки к конструктивному элементу летательного аппарата
Крепление многоконтурного турбореактивного двигателя к летательному аппарату
Канал охлаждения, выполненный в стенке
Устройство и способ кругового деформирования круглой детали, в частности, выпускного картера газотурбинного двигателя
Полный вал газотурбинного двигателя и газотурбинный двигатель, содержащий по меньшей мере упомянутый вал
Разделенный на секторы сопловой аппарат, турбина низкого давления и турбомашина, содержащие такой сопловой аппарат
Промежуточный картер турбореактивного двигателя и турбореактивный двигатель
Камера сгорания турбомашины со спиральной циркуляцией воздуха

