СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ
Вид РИД
Изобретение
Изобретение относится к системам наведения летательных аппаратов (ЛА) на наземные объекты, в частности к системам автономного наведения (самонаведения) ЛА, включающим в свой состав бортовые радиолокационные средства (БРЛС), обеспечивающие наведение летательных аппаратов на наземные объекты по радиолокационным изображениям (РЛИ) этих объектов, получаемым с использованием синтезирования антенного раскрыва (CAP).
Под способом наведения аналогично [1, 2, 3] понимается закон формирования требуемой фазовой траектории наводимого объекта, определяемый правилом формирования сигналов траекторного управления.
Специфической особенностью автономного наведения ЛА с бортовыми радиолокационными средствами, использующими режимы CAP, на наземные объекты является необходимость формирования криволинейных траекторий наведения ЛА с целью обеспечения требуемого линейного разрешения РЛИ, формируемых БРЛС в указанных режимах.
При определенных допущениях, указанных в [4, стр.143,…, 152], для обеспечения требуемого линейного азимутального ΔlТ разрешения РЛИ наземного объекта, формируемого БРЛС с CAP, траектория движения ЛА должна быть такой, чтобы бортовой пеленг этого объекта φГТ удовлетворял условию

где: D - значение дальности от наводимого ЛА до наземного объекта;
VП - значение путевой скорости ЛА;
λ - длина волны бортовой радиолокационной станции;
TС - время синтезирования антенного раскрыва БРЛС.
Очевидно, что для наземных объектов, скорость изменения положения которых, как правило, пренебрежимо мала по сравнению со скоростью полета наводимых ЛА, траектории наведения ЛА, удовлетворяющие (1), при фиксированных начальных значениях D и VП, детерминированном законе изменения VП, а также фиксированных ΔlТ, λ, ΔTС определяются единственным образом, исходя из требуемых значений φГТ. С учетом этого задача наведения ЛА с БРЛС, использующими CAP, на наземные объекты может рассматриваться как задача формирования криволинейных траекторий наведения, максимально приближающихся к требуемым.
Известен [2] способ наведения ЛА на наземные объекты с использованием БРЛС с CAP, в соответствии с которым измеряют значения дальности от наводимого ЛА до наземного объекта и скорости их сближения, значения бортового пеленга наземного объекта и угловой скорости его линии визирования в горизонтальной плоскости, значения скорости наводимого ЛА и его ускорения в горизонтальной плоскости и формируют сигнал управления ΔГ летательным аппаратом в горизонтальной плоскости по соотношению

где: qφГ, qωГ - коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования наземного объекта в горизонтальной плоскости;
kjГ - коэффициент, определяющий экономичность наведения ЛА в горизонтальной плоскости;
D - значение дальности от наводимого ЛА до наземного объекта;
VСБ - значение скорости сближения наводимого ЛА с наземным объектом;
φГ - значение бортового пеленга наземного объекта в горизонтальной плоскости (при этом предполагается, что бортовой пеленг наземного объекта определяется как угол между проекцией вектора скорости ЛА на горизонтальную плоскость (земную поверхность) и направлением на наземный объект в этой плоскости);
ωГ - значение угловой скорости линии визирования наземного объекта в горизонтальной плоскости;
jГ - значение ускорения наводимого ЛА в горизонтальной плоскости;
φГТ - требуемый угол упреждения, обеспечивающий требуемое линейное азимутальное разрешение радиолокационных изображений, формируемых БРЛС наводимого ЛА в горизонтальной плоскости, который рассчитывают по соотношению
где: λ - длина волны бортовой радиолокационной станции;
ΔF - полоса пропускания доплеровского фильтра;
V - значение скорости (путевой) наводимого ЛА;
ΔlТ - требуемое линейное разрешение в горизонтальной плоскости.
Недостатками известного способа [2] являются:
1. Формирование траектории ЛА, наводимого на наземный объект, осуществляется только в горизонтальной плоскости.
2. Обеспечивается не точное, а преимущественное наведение по бортовому пеленгу, формируемому с учетом требуемого угла упреждения, или по угловой скорости линии визирования. «Вес ошибок по бортовому пеленгу и угловой скорости линии визирования» [2] может изменяться путем манипуляции значениями коэффициентов qφГ, qωГ.
Наиболее близким аналогом (прототипом) настоящего изобретения является известный способ наведения [3] летательных аппаратов на наземные объекты, в соответствии с которым измеряют значения скорости сближения наводимого летательного аппарата и наземного объекта, угловой скорости линии визирования наземного объекта в горизонтальной плоскости, а также поперечного ускорения наводимого летательного аппарата в горизонтальной плоскости и формируют сигнал управления летательным аппаратом в горизонтальной плоскости (параметр рассогласования) по соотношению, соответствующему методу пропорционального наведения со смещением

где: N0 - навигационный параметр, рассчитываемый с учетом дальностей начала и конца наведения;
 - скорость сближения ЛА с наземным объектом;
- скорость сближения ЛА с наземным объектом;
φГ - значение угловой скорости линии визирования наземного объекта в горизонтальной плоскости;
φГТР - значение требуемого приращения (смещения) угловой скорости линии визирования в горизонтальной плоскости;
jГ - значение поперечного ускорения наводимого летательного аппарата в горизонтальной плоскости.
Значение требуемого приращения (смещения) угловой скорости линии визирования наземного объекта в горизонтальной плоскости определяется, исходя из условия обеспечения требуемого разрешения Δl РЛИ, формируемых БРЛС с CAP, связываемого с бортовым пеленгом φГ наземного объекта в соответствии с выражением
где: D - дальность от ЛА до наземного объекта;
- скорость сближения ЛА с наземным объектом;
λ - длина волны БРЛС;
ΔF - полоса пропускания доплеровского фильтра;
φГ - бортовой пеленг наземного объекта в горизонтальной плоскости. В выражении (5), преобразованном к виду

левая часть в первом приближении соответствует угловой скорости линии визирования наземного объекта в горизонтальной плоскости при его визировании в этой плоскости с бортовым пеленгом φГ.
Значение ΔωГТР в [3] рассчитывают с учетом коэффициента KУСТ,
определяющего точность наведения и стабилизацию требуемого линейного разрешения (Δl=ΔlТ) в горизонтальной плоскости по соотношению
Недостатками известного способа [3] являются:
1. Формирование траектории ЛА, наводимого на наземный объект, осуществляется только в горизонтальной плоскости.
2. Оценка значения требуемого приращения (смещения) угловой скорости линии визирования в горизонтальной плоскости, формируемая согласно (7), не учитывает возможного разброса и изменения скорости полета ЛА, от величины которой, как известно, зависит размер синтезируемой апертуры антенны БРЛС, а следовательно, и величина линейного разрешения формируемого РЛИ наземного объекта в горизонтальной плоскости.
3. При реализации наведения ЛА на наземный объект в соответствии с известным способом [3] не осуществляется проверка степени соответствия обеспечиваемого угла φГ бортового пеленга наземного объекта в горизонтальной плоскости его требуемому значению φГТ.
Основным недостатком известных способов [2, 3] наведения на наземные объекты ЛА с использованием бортовых радиолокационных средств (БРЛС) с синтезированием антенного раскрыва (CAP) является то, что указанное наведение осуществляется только в одной (горизонтальной) плоскости.
Отсутствует учет влияния вертикальной составляющей скорости полета ЛА на характеристики линейного разрешения радиолокационных изображений наблюдаемого наземного объекта, формируемых БРЛС с CAP в процессе наведения ЛА.
Формирование сигналов управления ЛА в вертикальной плоскости влечет за собой изменение направления вектора скорости ЛА в этой плоскости и, соответственно изменение величины скорости полета ЛА в горизонтальной плоскости. В свою очередь, это изменение влечет за собой изменение величины азимутального линейного разрешения РЛИ, формируемых БРЛС с CAP. За счет вертикальной составляющей скорости полета ЛА, возможно возникновение искажений РЛИ, проявляющихся в увеличении размытости и развороте синтезированных радиолокационных изображений.
С другой стороны, движение ЛА в горизонтальной плоскости в общем случае влечет за собой изменение угла наклона линии визирования наземного объекта. При этом могут существенным образом меняться условия визирования этого объекта, проявляющиеся в нежелательных флуктуациях мощности отраженных радиолокационных сигналов, а также изменяется разрешение формируемых РЛИ по горизонтальной дальности.
Технический результат изобретения заключается в получении высокой точности наведения летательных аппаратов на наземные объекты, осуществляемого с использованием бортовых радиолокационных средств с CAP.
Задачей настоящего изобретения является разработка способа наведения летательных аппаратов, оснащенных БРЛС с CAP, на наземные объекты путем реализации такого траекторного управления ЛА, при котором одновременно обеспечиваются:
высокая точность наведения летательных аппаратов на наземные объекты с использованием на борту ЛА БРЛС с CAP;
стабилизация линейного разрешения формируемых БРЛС с CAP радиолокационных изображений наземных объектов, как по азимуту, так и по горизонтальной дальности;
минимальные искажения РЛИ наземных объектов, формируемых БРЛС с CAP в процессе наведения ЛА на эти объекты.
Известно, что доплеровская частота радиолокационного сигнала, отраженного от неподвижного наземного точечного объекта, наблюдаемого с борта ЛА, зависит от величины скорости летательного аппарата, определяемой относительно какой-либо неподвижной земной системы координат, и угла отклонения линии визирования наземного объекта от направления вектора указанной скорости летательного аппарата. Значение этой частоты определяется соотношением

где: Vr - скорость сближения носителя БРЛС (ЛА) с наблюдаемым
объектом (радиальная скорость);
V - скорость ЛА относительно неподвижной земной системы координат;
φ - угол отклонения линии визирования наблюдаемого объекта от вектора скорости ЛА (в плоскости визирования объекта, образуемой линией его визирования и вектором скорости ЛА);
λ - длина волны зондирующих сигналов БРЛС.
Определив с использованием БРЛС с CAP значение Fd, доплеровской частоты радиолокационных сигналов, отраженных от наземного точечного объекта, зная величину скорости полета ЛА, можно получить оценку угла φ.
Рассматривая Fd как функцию:
угла φГ - отклонения проекции линии визирования наблюдаемого объекта на горизонтальную плоскость XOZ (земную поверхность, как это показано на рисунке фиг.1) от проекции вектора скорости ЛА (совпадающей по направлению с осью ОХ) на эту же плоскость (азимутальный угол);
угла ε - наклона линии визирования наблюдаемого наземного точечного объекта,
соотношение (8) можно записать в виде

где:
VП - горизонтальная (путевая) составляющая скорости полета ЛА;
VY - вертикальная составляющая скорости полета ЛА.
С использованием разложения (10) в кратный ряд Тейлора [5], в его линейном приближении, для точки на земной поверхности, направление на которую отстоит от направления на рассматриваемый точечный наземный объект на малые углы ΔφГ в горизонтальной плоскости и Δε в вертикальной плоскости можно записать:

где:

- величины, характеризующие изменение доплеровской частоты отраженного сигнала при смещении направления визирования рассматриваемого наземного объекта соответственно на угол ΔφГ в горизонтальной плоскости и угол Δε в вертикальной плоскости.
Для ΔφГ, Δε, с учетом их предполагаемой малости, справедливо

где: Δl - линейное азимутальное отклонение наблюдаемого объекта на земной поверхности, соответствующее ΔφГ. Знак Δl определяется знаком ΔφГ;
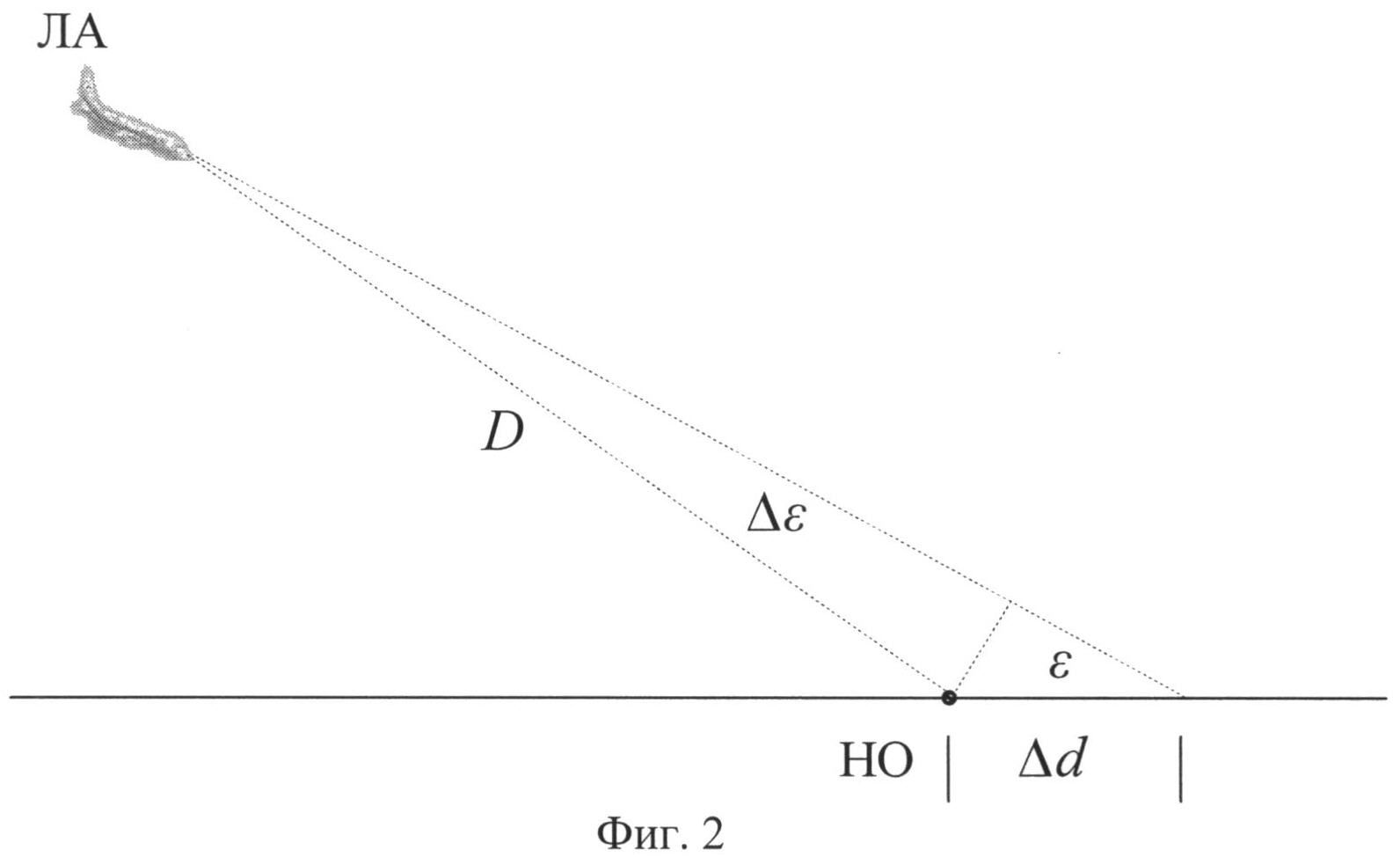
Δd - линейное отклонение наблюдаемого объекта на горизонтальной плоскости (земной поверхности) по направлению горизонтальной проекции линии визирования объекта, соответствующее Δε, как показано на рисунке фиг.2.
D, DГ соответственно дальность от ЛА до наземного объекта и горизонтальная дальность от ЛА до наземного объекта. Из (11), с учетом (12), а также того, что

где Θ - угол наклона вектора скорости  , можно записать:
, можно записать:


Данными выражениями определяется разность

доплеровских частот сигналов, отраженных от двух точечных наземных объектов, наблюдаемых в условиях, характеризующихся параметрами (φГ, ε, Θ, V, D, λ), и отстоящих друг от друга на величины Δd и Δl.
Также (17), в первом приближении, характеризует ширину доплеровского спектра радиолокационных сигналов, отражаемых малоразмерным наземным объектом или участком местности, имеющим протяженность Δd и Δl соответственно по горизонтальной дальности, и азимуту при его радиолокационном наблюдении с борта ЛА.
Если величина Δd соответствует величине элемента разрешения БРЛС по дальности, формируемого за счет амплитудной или внутриимпульсной модуляции зондирующих сигналов БРЛС, то при наблюдении наземного объекта, имеющего пренебрежимо малую протяженность по азимуту (Δl=0), величина ΔFd(φГ, ε, Δd) определяет степень азимутальной размытости радиолокационной отметки от наблюдаемого объекта на РЛИ, формируемом с использованием CAP.
Если величина Δd превышает величину элемента разрешения БРЛС по дальности, формируемого за счет амплитудной или внутриимпульсной модуляции зондирующих сигналов БРЛС, то величина ΔFd(φГ, ε, Δd) также определяет степень разворота радиолокационного изображения этого объекта в частотной области.
Оба указанных эффекта могут приводить к искажению радиолокационных изображений наземных объектов, формируемых БРЛС ЛА в полете при использовании CAP.
Данные искажения, очевидно, отсутствуют при выполнении условия

Выполнение этого условия, как следует из (16), обеспечивается в том случае, когда

или при заданных φГ и ε≠0 угол наклона траектории полета ЛА в процессе синтезирования антенного раскрыва

В этом случае горизонтальная проекция линии визирования наблюдаемого точечного наземного объекта является касательной к изодопе (линии равного доплеровского сдвига частоты [6]), проходящей через этот объект в горизонтальной плоскости (по земной поверхности), а вектор скорости ЛА в плоскости XOY направлен в точку (ВЦ), как показано на рисунке фиг.1, образованную пересечением перпендикуляра (НО-ВЦ) к горизонтальной проекции (О-НО) линии визирования наземного объекта, проходящего через этот объект и принадлежащего горизонтальной плоскости, с вертикальной плоскостью XOY, которой принадлежит вектор скорости летательного аппарата.
Последнее утверждение подтверждается соотношениями:

где: YЛА - высота полета ЛА;
DВЦ - дальность от ЛА до точки ВЦ,
DГВЦ - горизонтальная дальность от ЛА до точки ВЦ,
при их подстановке в (20).
Точка ВЦ при этом может рассматриваться в качестве виртуального наземного объекта, на который должно осуществляться наведение ЛА в текущий момент времени.
В условиях геометрического построения, соответствующего рисунку фиг.1, отрезок (НО-ВЦ) также перпендикулярен линии визирования (ЛА-НО) наземного объекта и при этом справедливо следующее соотношение:

где: φ - угол отклонения линии визирования наземного объекта от направления вектора скорости ЛА.
Данное утверждение подтверждается соотношениями:

при их подстановке в (22).
Соотношение (22) отражает те условия формирования траектории полета ЛА в процессе его наведения на наземный объект, при которых БРЛС с CAP обеспечивает формирование РЛИ наземного объекта с наименьшими искажениями, возникающими за счет наличия вертикальной составляющей скорости полета ЛА.
Помимо обеспечения минимальных искажений радиолокационных изображений, формируемых БРЛС с CAP в процессе наведения ЛА на наземный объект, целесообразно осуществление стабилизации линейной разрешающей способности этих изображений по азимуту и горизонтальной дальности. При этом существенно упрощаются процедуры обработки РЛИ, с использованием которых осуществляется наведение ЛА на наземный объект.
Стабилизация требуемой разрешающей способности БРЛС с CAP по горизонтальной дальности (ΔdТ=const) при использовании в БРЛС модулированных зондирующих сигналов, как следует из рисунка фиг.2, требует поддержания постоянства угла визирования наземного объекта в вертикальной плоскости (ε=εТ=const).
При обеспечении постоянства угла визирования наземного объекта в вертикальной плоскости снижаются уровень и частота флуктуации радиолокационных сигналов, отраженных от этого объекта, обусловленных изрезанностью его диаграммы обратного рассеяния в вертикальной плоскости.
Для стабилизации требуемого линейного азимутального разрешения (ΔlТ=const) формируемого РЛИ при выполнении условий визирования наземного объекта, представленных на рисунке фиг.1, требуется обеспечивать отклонение направления линии визирования этого объекта от направления вектора скорости ЛА в плоскости, образуемой вектором скорости ЛА и указанной линией визирования (плоскости визирования наземного объекта), аналогично (I):

где: TС - время синтезирования антенного раскрыва БРЛС;
V - скорость ЛА относительно неподвижной земной системы координат.
При этом значения (φТ, εТ) в соответствии с (22) определяют требуемый угол наклона вектора скорости ЛА в процессе синтезирования антенного раскрыва БРЛС

При наведении на наземные объекты стабилизированных по крену летательных аппаратов, управление которыми осуществляется путем формирования нормального и бокового (поперечных) ускорений, являющихся проекциями вектора полного ускорения ЛА на оси O1Y1, O1Z1 прямоугольной показанной на рисунке фиг.1 подвижной системы координат O1X1Y1Z1, начало которой (O1) совпадает с ЛА, ось O1X1 совпадает с вектором земной скорости ЛА, ось O1Y1 принадлежит вертикальной плоскости, проходящей через ось O1X1, а ось O1Z1 дополняет систему координат до правой, для условий синтезирования антенного раскрыва БРЛС, соответствующих рисунку фиг.1, должно обеспечиваться выполнение следующего соотношения

где: φБТ - требуемое значение угла φБ бокового отклонения проекции линии визирования наземного объекта на наклонную плоскость X1O1Z1 (в которой осуществляется продольное движение ЛА по направлению оси O1X1, а также боковое управление ЛА) от направления вектора скорости ЛА.
Значения φБТ, ΘТ, получаемые с использованием соотношений (24), (25), (26), определяют требуемую траекторию полета ЛА в процессе его наведения на наземный объект, при заданном εТ=const. Траекторию, обеспечивающую минимальные искажения радиолокационных изображений, формируемых БРЛС с CAP в полете, и стабилизацию требуемого линейного разрешения этих изображений, как по горизонтальной дальности, так и по азимуту.
Несоответствие текущих значений параметров (φБ, ε, Θ), характеризующих траекторию полета ЛА в процессе его наведения на наземный объект, их требуемым значениям (φБТ, εТ, ΘТ) обуславливает необходимость осуществления соответствующего траекторного управления полетом ЛА.
При наведении ЛА на наземные объекты с использованием предлагаемого способа должна осуществляться оценка текущих отклонений (невязок) от требуемых значений:
угла φБ - бокового отклонения проекции линии визирования наземного объекта на наклонную плоскость бокового управления ЛА от направления вектора скорости ЛА (рисунок фиг.1),

угла ε - наклона линии визирования наземного объекта в вертикальной плоскости,

угла Θ наклона вектора скорости ЛА в вертикальной плоскости,

Для условий синтезирования антенного раскрыва БРЛС, соответствующих рисунку фиг.1, с учетом соотношения (26) в линейном приближении величина ΔφБ связана с величиной

текущего отклонения угла φ, оцениваемого по соотношению (9), от его требуемого значения φТ соотношением

где:

При реализации синтезирования антенного раскрыва величина φ поддается непосредственной и весьма точной оценке (до десятых долей градуса и выше).
При формировании сигналов управления (ΔБ, ΔН,) стабилизированного по крену ЛА в боковой и нормальной плоскостях управления следует учитывать, что угол ε визирования наземного объекта в вертикальной плоскости изменяется, как при управлении ЛА по курсу, так и по тангажу. Отклонение (Δε) этого угла от требуемого значения, обусловленное действием сигналов управления, формируемых в плоскости бокового управления, как и отклонение (ΔΘ) от требуемого значения угла наклона вектора скорости ЛА должно компенсироваться соответствующим сигналом управления в плоскости нормального управления.
В соответствии с изложенным предлагаемый способ наведения ЛА на наземные объекты предполагает формирование сигналов управления (ΔБ, ΔН,) ЛА с учетом следующих функциональных связей:

В рамках предлагаемого способа наведения ЛА на наземные объекты с использованием формирования сигналов управления (ΔБ, ΔН,) ЛА по методу пропорционального наведения со смещением [7, стр.59] сигнал бокового управления ЛА

где: ωБ - угловая скорость линии визирования наземного объекта в плоскости бокового управления;
ωБС - требуемое смещение угловой скорости линии визирования наземного объекта в плоскости бокового управления;
jБ - ускорение движения ЛА в плоскости бокового управления. При этом требуемое смещение ωБС угловой скорости линии визирования определяется с периодом синтезирования антенного раскрыва следующим образом:
где: kБ - коэффициент, учитывающий способ формирования оценки φБ и, в том числе, временную задержку ее формирования при реализации CAP в процессе наведения ЛА на наземный объект, а также динамику изменения значений угла φ при воздействии сигналов бокового управления ЛА.
Из (34) и (35) видно, что при приближении к наземному объекту и стремлении φБТ к нулю обеспечивается пропорциональное наведение ЛА непосредственно по данным об угловой скорости линии визирования объекта в плоскости бокового управления.
При формировании по методу пропорционального наведения со смещением сигнала управления ЛА (ΔН) в плоскости нормального управления

где: ωН - угловая скорость линии визирования наземного объекта в плоскости нормального управления;
ωНС - требуемое смещение угловой скорости линии визирования наземного объекта в плоскости нормального управления;
jН - ускорение движения ЛА в плоскости нормального управления. При этом требуемое смещение ωНС угловой скорости определяется с периодом синтезирования антенного раскрыва следующим образом:
где: kε, kθ,. - весовые коэффициенты, учитывающие способ формирования оценок углов наклона линии визирования наземного объекта (ε) и вектора скорости ЛА (Θ), включая временную задержку их формирования при реализации CAP в процессе наведения ЛА на наземный объект, а также динамику изменения значений углов (ε, Θ,) при воздействии сигналов нормального управления ЛА.
С учетом изложенного, достижение технического результата предлагаемого способа наведения летательного аппарата на наземный объект с использованием БРЛС с CAP, обеспечивается тем, что при заданном постоянном значении угла наклона линии визирования наземного объекта, в процессе наведения ЛА на этот объект с использованием бортовой навигационной системы ЛА осуществляют измерение текущей скорости полета ЛА, текущего угла наклона вектора скорости ЛА, с использованием БРЛС с CAP осуществляют измерение текущей дальности до наземного объекта, текущего угла отклонения линии визирования наземного объекта от направления вектора скорости ЛА, текущего угла наклона линии визирования наземного объекта в вертикальной плоскости, с использованием полученных результатов осуществляют управление полетом ЛА в плоскостях управления ЛА таким образом, чтобы обеспечивалась стабилизация линейного азимутального разрешения радиолокационного изображения наземного объекта, формируемого БРЛС с CAP, стабилизация разрешения указанного радиолокационного изображения по горизонтальной дальности, а направление вектора скорости ЛА в вертикальной плоскости в каждый момент времени совпадало с направлением на точку пересечения перпендикуляра к проекции линии визирования наземного объекта на горизонтальную плоскость (земную поверхность), проходящего через наземный объект и принадлежащего горизонтальной плоскости, с вертикальной плоскостью, которой принадлежит вектор скорости летательного аппарата, для чего рассчитывают по соотношениям (24), (25) требуемое значение угла между направлением линии визирования объекта и направлением вектора скорости ЛА в наклонной плоскости, образуемой вектором скорости ЛА и линией визирования цели, требуемое значение угла наклона вектора скорости ЛА в процессе синтезирования антенного раскрыва БРЛС, формируют оценки величин отклонений текущих значений угла наклона вектора скорости ЛА, угла наклона линии визирования наземного объекта, угла между направлением вектора скорости ЛА и линией визирования наземного объекта, угла между направлением вектора скорости ЛА и линией визирования наземного объекта в плоскости бокового управления ЛА от их требуемых значений, с использованием указанных оценок отклонений, с учетом длительности синтезирования антенного раскрыва БРЛС рассчитывают необходимые величины требуемых смещений угловой скорости линии визирования наземного объекта в плоскостях бокового и нормального управления ЛА и формируют сигналы траекторного управления ЛА в плоскостях бокового и нормального управления по методу пропорционального наведения со смещением, обеспечивающие устранение отклонений текущих значений угла наклона вектора скорости ЛА, угла наклона линии визирования наземного объекта, угла между направлением вектора скорости ЛА и линией визирования наземного объекта от их требуемых значений.
Предлагаемый способ наведения летательного аппарата на наземный объект с использованием БРЛС с CAP реализуется следующим образом.
1. При выводе ЛА в заданную точку начала работы БРЛС с CAP и обнаружении БРЛС наземного объекта, на который должно осуществляться наведение ЛА, задается требуемое значение угла (εТ) наклона линии визирования этого объекта в вертикальной плоскости.
2. В процессе наведения летательного аппарата на наземный объект с использованием БРЛС с CAP по результатам измерений формируют оценки:
D - текущей дальности от ЛА до наземного объекта;
V - текущей скорости полета ЛА;
ε - текущего угла наклона линии визирования наземного объекта (например, по результатам измерений с использованием моноимпульсного пеленгования, реализуемого БРЛС с CAP, или по результатам оценок текущей наклонной дальности до наземного объекта и текущей высоты полета ЛА с использованием бортовой системы навигации);
Θ - текущего угла наклона вектора скорости ЛА (с использованием бортовой системы навигации);
φ - текущего угла отклонения линии визирования наблюдаемого объекта от направления вектора скорости ЛА (по результатам измерений с использованием доплеровской фильтрации, реализуемых БРЛС с CAP);
3. В процессе наведения летательного аппарата на наземный объект с использованием БРЛС с CAP на основе данных о:
требуемой величине (ΔlТ) линейной азимутальной разрешающей способности РЛИ, подлежащих формированию БРЛС с CAP;
длине волны (λ) зондирующих сигналов БРЛС;
времени (TС) синтезирования антенного раскрыва;
текущей дальности (D) до наземного объекта;
текущей скорости (V) полета ЛА
в соответствии с (24) определяется требуемое боковое отклонение (φТ) линии визирования наземного объекта от направления вектора скорости ЛА.
4. По известным значениям (φТ, εТ) по соотношению (25) определяется значение требуемого угла (ΘТ) наклона вектора скорости ЛА в процессе синтезирования антенного раскрыва БРЛС.
5. По соотношениям (26)-(31) определяют величину текущих отклонений (невязок) (ΔφБ, Δε, ΔΘ) угла между линией визирования наблюдаемого объекта и направлением вектора скорости ЛА в плоскости бокового управления ЛА, угла наклона линии визирования наземного объекта, угла наклона вектора скорости ЛА от их требуемых значений и с учетом соотношений (33)-(37) формируют сигналы управления ЛА.
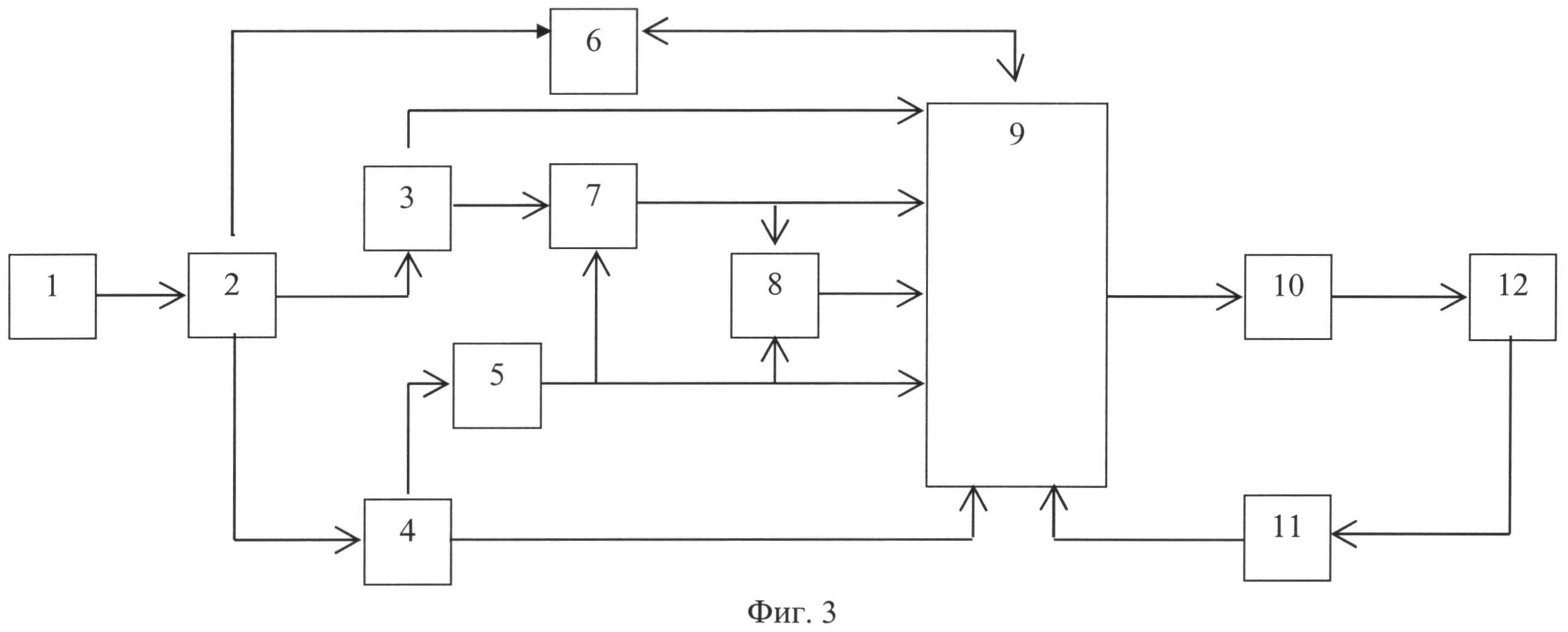
На рисунке фиг.3 представлена упрощенная структурная схема возможного варианта системы, реализующей предлагаемый способ наведения летательного аппарата на наземный объект с использованием БРЛС с CAP, где:
1 - антенная система БРЛС;
2 - приемник-передатчик БРЛС;
3 - измеритель дальности и скорости сближения;
4 - угломер наклонного канал;
5 - устройство запоминания значения требуемого угла наклона линии визирования;
6 - измеритель углового положения линии визирования объекта относительно направления вектора скорости ЛА;
7 - вычислитель требуемого смещения угла бокового канала;
8 - вычислитель требуемого смещения угла нормального канала;
9 - вычислитель сигналов управления;
10 - система управления;
11 - блок акселерометров;
12 - летательный аппарат.
Представленный на рисунке фиг.3 вариант моноимпульсной БРЛС с CAP, реализующей предлагаемый способ наведения летательного аппарата на наземный объект, функционирует следующим образом.
Моноимпульсная антенная система 1 БРЛС осуществляет пространственную селекцию радиолокационного сигнала, отраженного от наземного объекта. С выхода антенной системы сигнал поступает на вход приемника 2 БРЛС, в котором за счет узкополосной доплеровской фильтрации, осуществляемой при реализации CAP, происходит выделение сигнала, отраженного от наземного объекта, на фоне шумов и мешающих отражений от земной поверхности. С выхода приемника 2 сигнал поступает на вход измерителя 3 наклонной дальности от ЛА до наземного объекта и скорости сближения ЛА с этим объектом, на вход угломера 4 наклонного моноимпульсного канала БРЛС, а также на вход измерителя 6 углового положения линии визирования объекта относительно направления вектора скорости ЛА.
Измеритель 6 формирует и выдает в вычислитель 9 текущие оценки углового положения линии визирования объекта относительно направления вектора скорости ЛА. Эти оценки формируются по соотношению (9) по данным о доплеровской частоте сигналов, отраженных от наземного объекта, и данным о величине скорости полета ЛА, поступающим в измеритель 6 из вычислителя сигналов управления 9. Угломер 4 с использованием данных, поступающих по наклонному каналу моноимпульсной БРЛС, формирует оценку текущего угла наклона линии визирования наземного объекта. Эта оценка, полученная в начальный момент времени реализации наведения ЛА на наземный объект, поступает в устройство 5, в котором запоминается в качестве значения требуемого угла наклона линии визирования наземного объекта. Указанное значение требуемого угла наклона линии визирования наземного объекта с выхода устройства 5 поступает в вычислитель 7 текущего требуемого угла отклонения линии визирования наземного объекта от направления скорости ЛА, в вычислитель 8 требуемого угла наклона траектории полета ЛА, а также в вычислитель 9 сигналов управления ЛА. В вычислителе 7 текущие оценки требуемого угла отклонения линии визирования наземного объекта от направления скорости ЛА формируются по соотношению (24) и выдаются в вычислитель 8 требуемого текущего угла наклона траектории полета ЛА, а также в вычислитель 9 сигналов управления ЛА. Из вычислителя 8 оценки требуемого текущего угла наклона траектории полета ЛА, формируемые по соотношению (25), также выдаются в вычислитель 9 сигналов управления ЛА. Вычислителем 9 сигналов управления ЛА по соотношениям (26)-(31) с использованием результатов оценки отклонений текущих значений углов φБ, ε, Θ от их требуемых значений, а также измеренных блоком акселерометров 11 величин нормального и бокового (поперечных) ускорений ЛА 12 формируются сигналы управления летательным аппаратом в плоскостях управления, поступающие в систему управления 10, которая осуществляет преобразование сформированных сигналов управления в соответствующие управляющие воздействия, которые поступают на управляющие элементы непосредственно летательного аппарата 12.
Для оценки эффективности предлагаемого способа наведения летательного аппарата на наземный объект было проведено его моделирование. Целью моделирования являлось исследование возможностей предлагаемого способа наведения ЛА на наземный объект в части одновременного обеспечения требуемого линейного разрешения РЛИ, формируемых БРЛС с CAP, по дальности и азимуту в горизонтальной плоскости и требуемой точности наведения ЛА.
В процессе моделирования для определения качества предлагаемого способа наведения ЛА на наземный объект оценивались следующие показатели.
Величина отклонения Δφ фактического значения угла φ* между направлением линии визирования наземного объекта и вектором скорости ЛА от его требуемого значения

Величина отклонения фактического значения угла линии визирования наземного объекта в вертикальной плоскости от требуемого

где: ε* - фактическое значение угла линии визирования наземного объекта в вертикальной плоскости.
Величина отклонения фактического значения угла наклона траектории полета ЛА от требуемого

где: Θ* - фактическое значение угла наклона траектории полета ЛА. В процессе моделирования в качестве показателей эффективности предлагаемого способа рассматривались оценки текущих линейных бокового и нормального промахов (hБ, hН). Указанные промахи определялись соответственно по соотношениям

где:  - скорость сближения ЛА с наземным объектом
- скорость сближения ЛА с наземным объектом
Исследования проводились посредством моделирования во времени процесса изменения пространственного положения ЛА в неподвижной нормальной земной системе координат, начало которой совмещено с наземным объектом, как это показано на рисунке фиг.4.
В том числе моделировались: V - скорость полета ЛА; D - наклонная дальность до наземного объекта; φ* - фактическое значение угла отклонения направления линии визирования наземного объекта от вектора скорости ЛА;  - фактическое значение угла отклонения направления линии визирования наземного объекта от направления вектора скорости в плоскости бокового управления ЛА; φТ - требуемый угол отклонения линии визирования наземного объекта от вектора скорости ЛА; ε* - фактическое значение угла линии визирования наземного объекта в вертикальной плоскости; εТ - требуемое значение угла линии визирования наземного объекта в вертикальной плоскости; Θ* фактическое значение угла наклона траектории ЛА; ΘТ - требуемое значение угла наклона траектории ЛА;
- скорость сближения ЛА с наземным объектом; ωН - угловая скорость линии визирования наземного объекта в плоскости нормального управления ЛА; ωБ - угловая скорость линии визирования наземного объекта в плоскости бокового управления ЛА; ΔБ, ΔН - сигналы бокового и нормального управления ЛА; jБ, jН - боковое и нормальное ускорения ЛА; hБ, hН - текущие линейные промахи в боковой и нормальной плоскостях управления ЛА.
- фактическое значение угла отклонения направления линии визирования наземного объекта от направления вектора скорости в плоскости бокового управления ЛА; φТ - требуемый угол отклонения линии визирования наземного объекта от вектора скорости ЛА; ε* - фактическое значение угла линии визирования наземного объекта в вертикальной плоскости; εТ - требуемое значение угла линии визирования наземного объекта в вертикальной плоскости; Θ* фактическое значение угла наклона траектории ЛА; ΘТ - требуемое значение угла наклона траектории ЛА;
- скорость сближения ЛА с наземным объектом; ωН - угловая скорость линии визирования наземного объекта в плоскости нормального управления ЛА; ωБ - угловая скорость линии визирования наземного объекта в плоскости бокового управления ЛА; ΔБ, ΔН - сигналы бокового и нормального управления ЛА; jБ, jН - боковое и нормальное ускорения ЛА; hБ, hН - текущие линейные промахи в боковой и нормальной плоскостях управления ЛА.
При этом требуемое значение φТ угла отклонения линии визирования наземного объекта от вектора скорости ЛА вычислялось по соотношению (24), требуемое значение ΘТ угла наклона траектории ЛА по соотношению (25), смещение угловой скорости ωБС линии визирования наземного объекта в плоскости бокового управления по (35), смещение угловой скорости ωНС линии визирования наземного объекта в плоскости нормального управления по (37), сигналы бокового и нормального управления (ΔБ, ΔН,) соответственно по (34) и (36), показатели качества функционирования (Δφ, Δε, ΔΘ, hБ, hН,) предлагаемого способа по (38), (39), (40), (41). Текущее местоположение ЛА определялось путем счисления координат.
Результаты моделирования, приведенные на рисунках фиг.5-10, получены в предположении, что начальное значение наклонной дальности от ЛА до наземного объекта D=10000 м, начальная скорость движения ЛА V=300 м/с, ускорение торможения ЛА составляет - 3 м/с2 и является постоянным на всей траектории полета ЛА до окончания процесса наведения ЛА на наземный объект, завершение наведения ЛА на наземный объект осуществляется при уменьшении дальности до наземного объекта до 150 м, начальный угол наклона линии визирования наземного объекта ε=-35°, требуемое разрешение формируемых РЛИ по горизонтальной дальности ΔdТ=10 м, требуемое линейное разрешение формируемых РЛИ по азимуту ΔlТ=10 м, длина волны БРЛС ЛА λ=4,0 см, время синтезирования антенного раскрыва ТС=128 мс.
На рисунке фиг.5 приведена проекция полученной по результатам моделирования траектории полета ЛА на горизонтальную плоскость нормальной земной системы координат, соответствующей рисунку фиг.4.
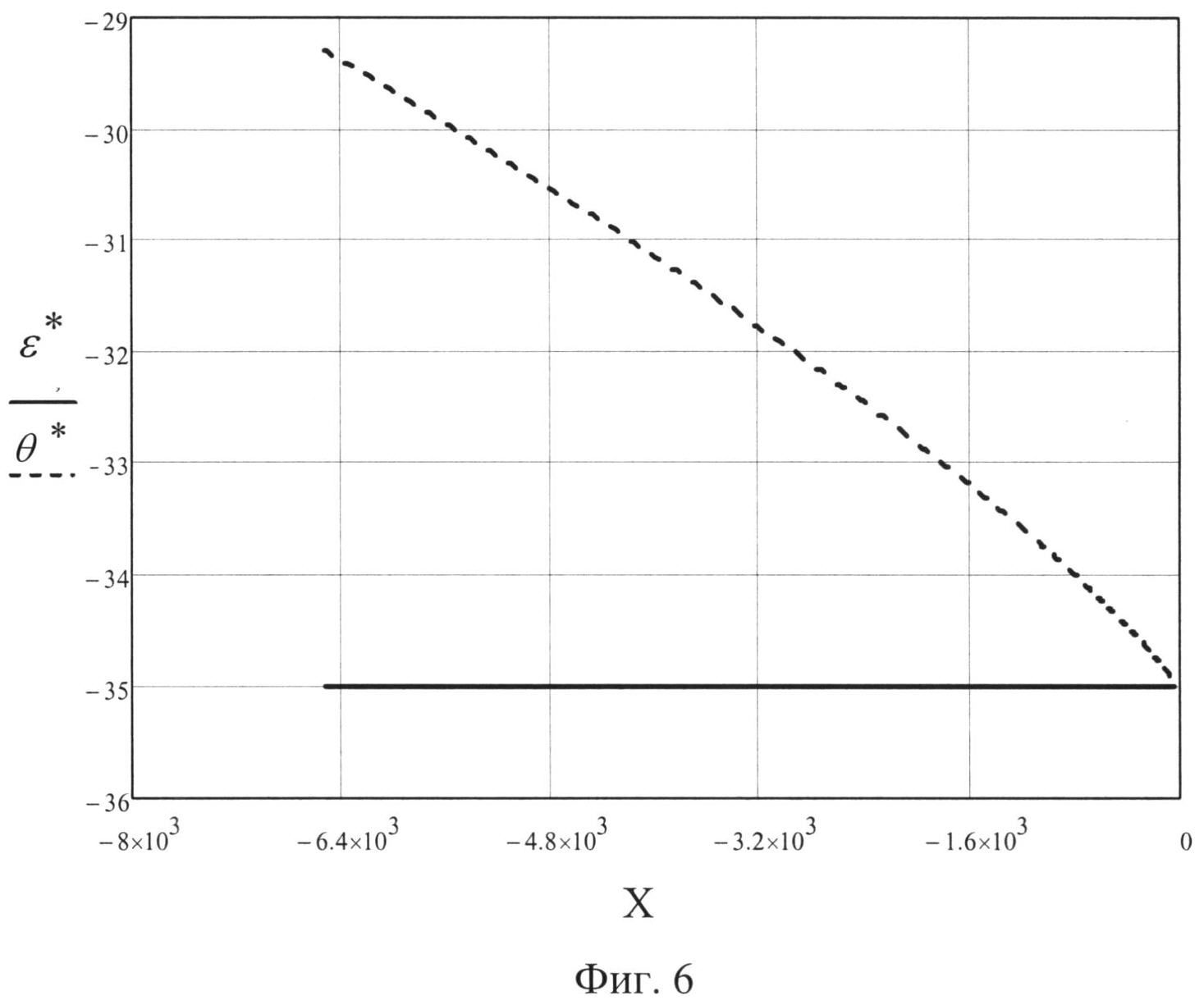
На рисунке фиг.6 приведены полученные в результате моделирования графики изменения значений углов ε*, Θ* (угла наклона линии визирования наземного объекта в вертикальной плоскости и угла наклона вектора скорости ЛА в процессе его наведения на наземный объект).
Абсцисса графика отражает изменение координаты ЛА по оси X нормальной земной системы координат, соответствующей рисунку фиг.4.
На рисунке фиг.7 приведен полученный в результате моделирования график, характеризующий в соответствии с (38) в плоскости бокового управления ЛА величину Δφ отклонения величины угла между линией визирования наземного объекта и вектором скорости ЛА от требуемого значения.
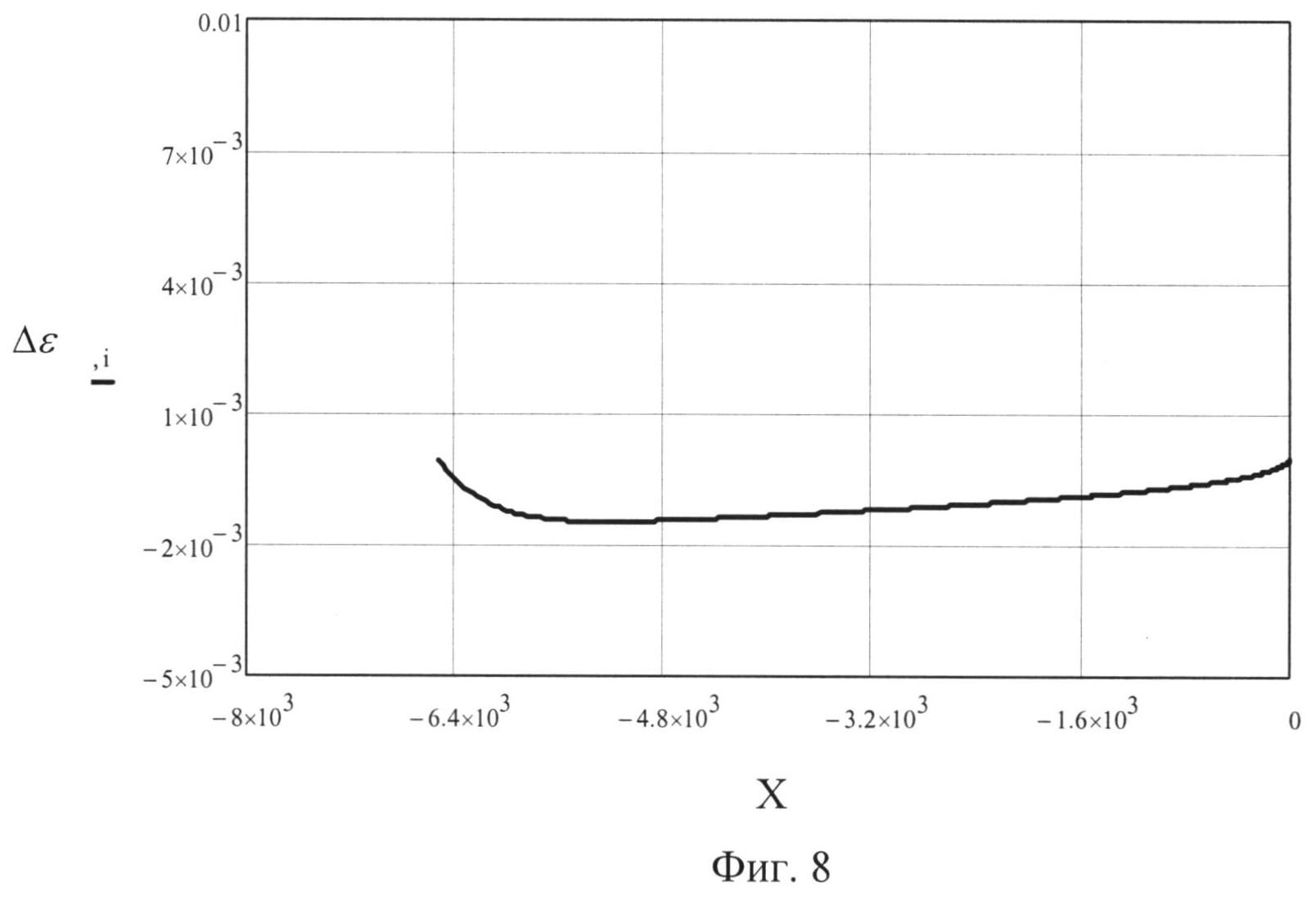
На рисунке фиг.8 приведен полученный в результате моделирования график, характеризующий в соответствии с (39) величину Δε отклонения фактического значения угла линии визирования наземного объекта в вертикальной плоскости от требуемого в процессе наведения ЛА на наземный объект.
На рисунке фиг.9 наведен полученный в результате моделирования график, характеризующий в соответствии с (40) величину ΔΘ отклонения фактического значения угла наклона траектории полета ЛА от требуемого.
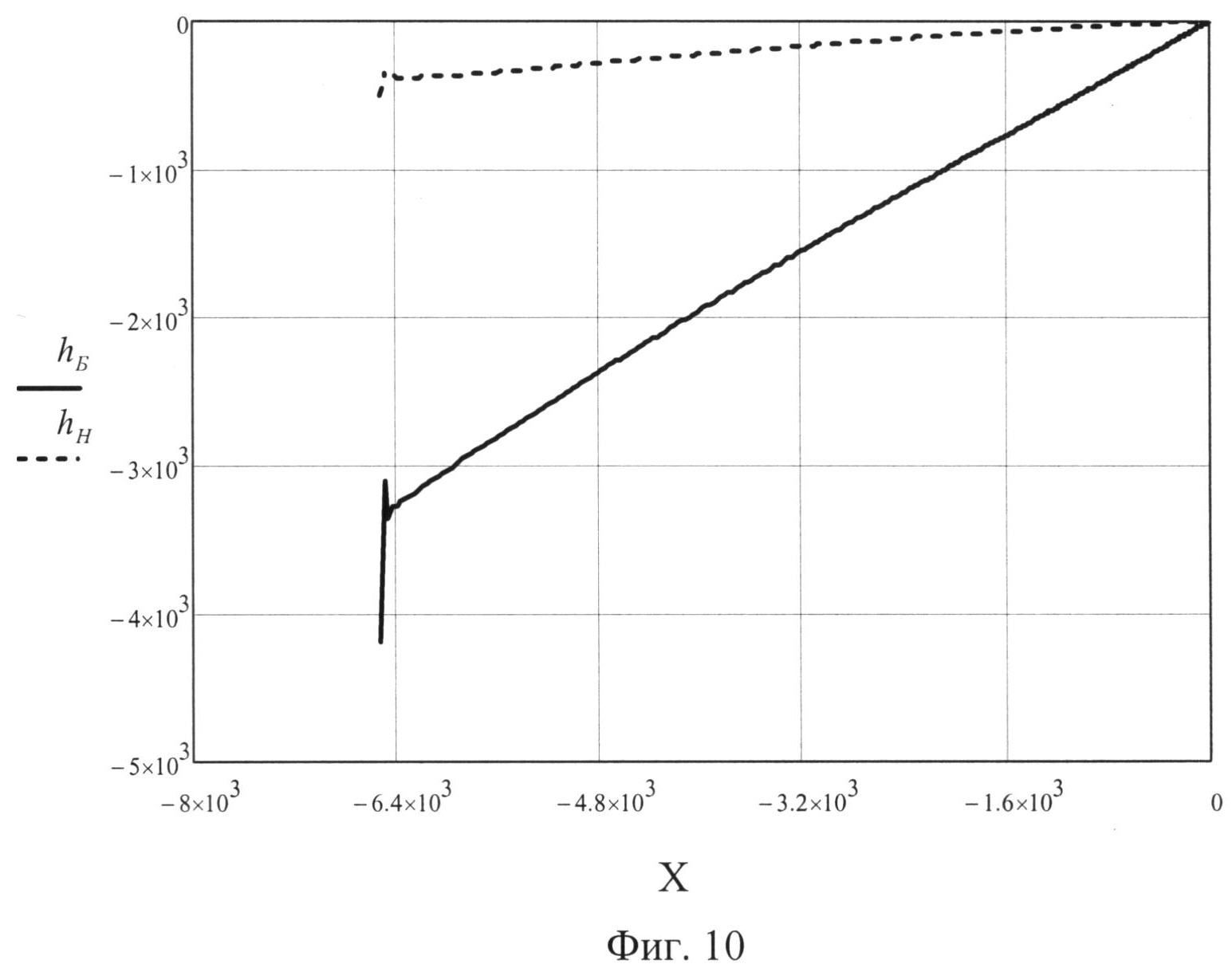
На рисунке фиг.10 приведены полученные в результате моделирования графики изменения значений бокового и нормального промахов (hБ, hН,) в процессе наведения ЛА на наземный объект.
Финальные значения промахов по результатам моделирования процесса наведения ЛА на наземный объект составили:, hБ=-1,5 м, hН,=-0,01 м.
Результаты исследований подтвердили работоспособность предлагаемого способа наведения ЛА на наземный объект с использованием БРЛС с CAP.
Предлагаемый способ наведения ЛА на наземный объект позволяет обеспечить:
- высокую точность наведения летательных аппаратов на наземные объекты;
- стабилизацию линейного разрешения формируемых БРЛС с CAP радиолокационных изображений наземных объектов, как по азимуту, так и по горизонтальной дальности;
- минимальные искажения РЛИ наземного объекта, формируемых БРЛС с CAP в процессе наведения ЛА на этот объект.
Использование предлагаемого способа не накладывает сколь-нибудь существенных дополнительных ограничений на элементную базу и возможно при существующих характеристиках вычислителей БРЛС с CAP по их быстродействию и объему памяти.
Источники информации
1. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь. 1982. - 304 с.
2. Патент на изобретение №2164654.
3. Патент на изобретение №2148235 - прототип.
4. Кондратенков Г.С., Фролов А.Ю. Теоретические основы построения радиолокационных систем дистанционного зондирования Земли. М.: Изд. ВВИА им. проф. Н.Е. Жуковского, 2009, с.143 - 152.
5. Корн Г., Корн Т. Справочник по математике. Для научных работников и инженеров. - М., Наука, 1974, с 146.
6. Справочник по радиолокации. Под ред. М. Сколника. Пер. с англ. (в четырех томах) Том 1. - М., Советское радио, 1976, с.280, 281.
7. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника, 2003. - 390 с.
Способ наведения летательных аппаратов на наземные объекты, заключающийся в том, что измеряют значения скорости сближения наводимого летательного аппарата (ЛА) с наземным объектом и формируют сигналы управления летательным аппаратом в горизонтальной плоскости по методу пропорционального наведения со смещением угловой скорости линии визирования наземного объекта, а требуемое смещение угловой скорости рассчитывают, исходя из условия обеспечения стабилизации требуемого азимутального линейного разрешения радиолокационных изображений наземного объекта, формируемых БРЛС с CAP в процессе наведения ЛА на этот объект, отличающийся тем, что управление наведением ЛА на наземные объекты осуществляется одновременно в наклонной плоскости, положение которой определяется направлением земной скорости ЛА, и в вертикальной плоскости, исходя из условия обеспечения и стабилизации требуемого разрешения радиолокационных изображений наземных объектов, формируемых БРЛС с CAP в процессе наведения ЛА, по азимуту и по горизонтальной дальности, с использованием метода пропорционального наведения со смещением угловых скоростей линии визирования наземного объекта в обеих плоскостях управления ЛА, при этом значения указанных смещений формируются таким образом, чтобы направление вектора скорости ЛА в вертикальной плоскости в каждый момент времени совпадало с направлением на точку пересечения перпендикуляра к проекции линии визирования наземного объекта на горизонтальную плоскость, совпадающую с земной поверхностью, проходящего через наземный объект и принадлежащего этой горизонтальной плоскости, с вертикальной плоскостью, которой принадлежит вектор скорости летательного аппарата, для чего задают требуемое значение угла наклона линии визирования наземного объекта в процессе наведения ЛА, дополнительно измеряют значения угла визирования наземного объекта в вертикальной плоскости, угла отклонения линии визирования наземного объекта от направления вектора скорости ЛА, значения величины и угла наклона вектора скорости ЛА, рассчитывают требуемое значение угла между направлением вектора скорости ЛА и линией визирования наземного объекта, рассчитывают требуемое значение угла наклона вектора скорости ЛА, формируют оценки величин отклонений текущих значений угла наклона вектора скорости ЛА, угла наклона линии визирования наземного объекта, угла между направлением вектора скорости ЛА и линией визирования наземного объекта, угла между направлением вектора скорости ЛА и проекцией линии визирования наземного объекта на наклонную плоскость движения ЛА от их требуемых значений и с использованием указанных оценок отклонений рассчитывают требуемые смещения угловых скоростей линии визирования наземного объекта в плоскостях управления ЛА.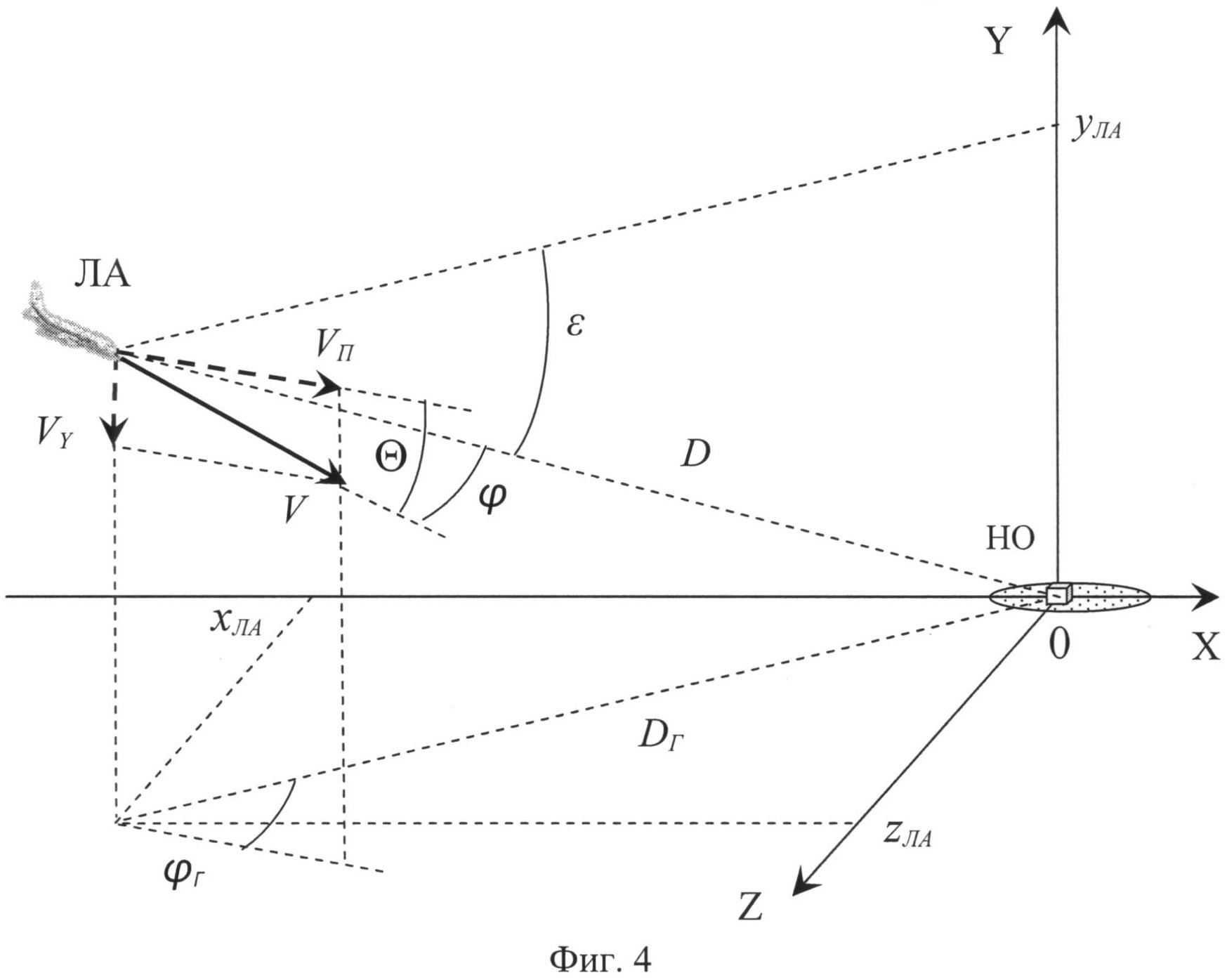
Устройство приготовления поверочных газовых смесей
Рефлекторная антенна френеля
Чувствительный элемент на поверхностных акустических волнах для измерения температуры
Датчик на поверхностных акустических волнах для беспроводного пассивного измерения перемещений
Чувствительный элемент на поверхностных акустических волнах для измерения температуры
Антенное устройство
Способ формирования изображения земной поверхности в радиолокационной станции с синтезированием апертуры антенны
Способ обработки радиолокационных сигналов в моноимпульсной рлс
Чувствительный элемент для измерения механических напряжений
Электроиндукционный пожарный извещатель
Способ измерения влажности
Чувствительный элемент для измерения температуры
Устройство для усиления сверхширокополосного сигнала
Способ оценки высоты полета летательного аппарата по радиолокационным изображениям земной поверхности
Самолет дальнего радиолокационного обнаружения корабельного базирования
Способ приведения летательного аппарата к наземному объекту
Устройство приготовления поверочных газовых смесей
Рефлекторная антенна френеля
Чувствительный элемент на поверхностных акустических волнах для измерения температуры
Датчик на поверхностных акустических волнах для беспроводного пассивного измерения перемещений

