Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЗИРОВАННОЙ КАЛИБРОВКИ СЛЕДЯЩИХ АНТЕННЫХ СИСТЕМ
Вид РИД
Изобретение
Изобретение относится к области создания антенных систем с функцией слежения за подвижным источником сигнала.
Распространенным способом калибровки следящих антенных систем является независимое, последовательное определение номинальных величин смещения, поворота и коэффициентов сжатия системы координат следящей системы относительно некоторой главной оси системы. В качестве главной оси могут выступать: направление главного лепестка основной антенны, ось летательного аппарата, относительно которой осуществляется поворот управляющих органов и др.
Известно, что ISTRAC осуществляет прием телеметрии и отправку команд управления (ТТС) в диапазоне S при выполнении пусков космических аппаратов (КА) при помощи сети наземных станций. Все ТТС станции оснащены альтазимутальными антеннами с точностью наведения 0.03 градуса. В процессе пуска антенна осуществляет слежение за КА с помощью траекторной информации, поступающей из комплекса RANGE. Слежение может также осуществляться при помощи заранее рассчитанной траектории. Информация об угловом положении антенны в процессе осуществления выведения КА является исходной информацией для предварительного определения параметров орбиты непосредственно после отделения КА от ракеты-носителя. В связи с этим систематические ошибки в угловом положении антенн должны быть определены с высокой точностью [1].
Известно, что на основании глубокого анализа систематических ошибок по углу места и азимуту была разработана математическая модель данных ошибок. Был разработан комплекс программ, оценивающий коэффициенты ошибок с помощью метода наименьших квадратов в апостериорном режиме. С использованием данных от ТТС станций была достигнута точность определения коэффициентов ошибок, обеспечивающая определение положения КА с точностью не хуже 200 м. Систематические ошибки определялись для всех наземных станций в процессе выведения КА. При этом оцениваются коэффициенты ошибок одновременно по азимуту и углу места [2].
Известно, что последовательный характер определения номинальных величин смещения, поворота и коэффициентов сжатия системы координат следящей системы приводит к необходимости большого числа технологических этапов калибровки. Отметим также, что в некоторых случаях данные величины могут изменяться в процессе эксплуатации. Например, в системах спутниковой связи величина поворота системы координат следящей системы может изменяться в зависимости от используемого частотного диапазона. Аналогичные процессы могут происходить в головках самонаведения при изменении внешней температуры. Это приводит к необходимости создания таблиц, определяющих величины смещения, поворота и коэффициентов сжатия системы координат следящей системы для различных условий эксплуатации. Как следствие, число технологических этапов калибровки существенно возрастает. Основными недостатками последовательного способа калибровки следящих антенных систем являются:
- большое число технологических этапов, и как следствие, большая продолжительность;
- большая степень участия человека при переходе от одного технологического этапа к другому;
- низкая точность в случае наличия случайных составляющих в измерениях следящей антенной системы;
- предпочтительно наличие неподвижного юстировочного источника сигнала (особенно актуально при калибровке антенн для спутниковой связи).
Как следствие, данный способ обладает высокой стоимостью и при этом низкой надежностью и точностью калибровки следящих систем.
Заявленный способ устраняет вышеуказанные недостатки и позволяет определять поправки к калибровочной характеристике следящей антенной системы за один технологический этап. При этом данный способ может использоваться как с применением неподвижного юстировочного источника, так и с применением сигнала от подвижного источника. Степень возможной автоматизации способа является крайне высокой, что существенно снижает стоимость калибровочных работ. Более того, способ позволяет осуществлять точную калибровку следящей антенной системы даже в случае существенной случайной составляющей в измерениях.
В связи с этим заявленный способ может быть использован как во время наладочных работ, так и во время штатной эксплуатации следящих антенных систем.
Техническим результатом изобретения является возможность быстрой калибровки следящих антенных систем с высокой точностью и надежностью.
Технический результат достигается тем, что способ автоматизированной калибровки следящей антенной системы заключается в том, что устанавливают источник сигнала в линейный диапазон измерений, в котором значение выходного сигнала следящей антенной системы удовлетворяет выражению a=kb, где b - отклонение источника сигнала от центра системы координат следящей антенной системы O'X'Y', а - отклонение следящей антенной системы, k - коэффициент, определяющий линейный диапазон измерений, добавляют к программной траектории движения источника сигнала  калибровочную траекторию
калибровочную траекторию  следящей антенной системы, при этом главная ось следящей антенной системы совершает движение по траектории
следящей антенной системы, при этом главная ось следящей антенной системы совершает движение по траектории  за счет формирования на системе управления следящей антенной системы управляющих воздействий на привод по углу места и привод по азимуту, на протяжении заданного калибровочного интервала Т с заданной периодичностью τ, например 10 p/с, в моменты времени t0,…,tn-1 снимают отклонения следящей антенной системы -
за счет формирования на системе управления следящей антенной системы управляющих воздействий на привод по углу места и привод по азимуту, на протяжении заданного калибровочного интервала Т с заданной периодичностью τ, например 10 p/с, в моменты времени t0,…,tn-1 снимают отклонения следящей антенной системы -  где t0 - момент начала калибровки, ti+1=ti+τ и n=[T/τ], где i - номер точки калибровочного маневра, значения отклонений сохраняют в системе управления следящей антенной системы, по завершении калибровочной траектории в системе управления следящей антенной системы формируют наборы данных:
где t0 - момент начала калибровки, ti+1=ti+τ и n=[T/τ], где i - номер точки калибровочного маневра, значения отклонений сохраняют в системе управления следящей антенной системы, по завершении калибровочной траектории в системе управления следящей антенной системы формируют наборы данных:  - калибровочные положения главной оси следящей антенной системы, здесь
- калибровочные положения главной оси следящей антенной системы, здесь 
 - отклик следящей антенной системы, далее формируют систему уравнений относительно неизвестного вектора
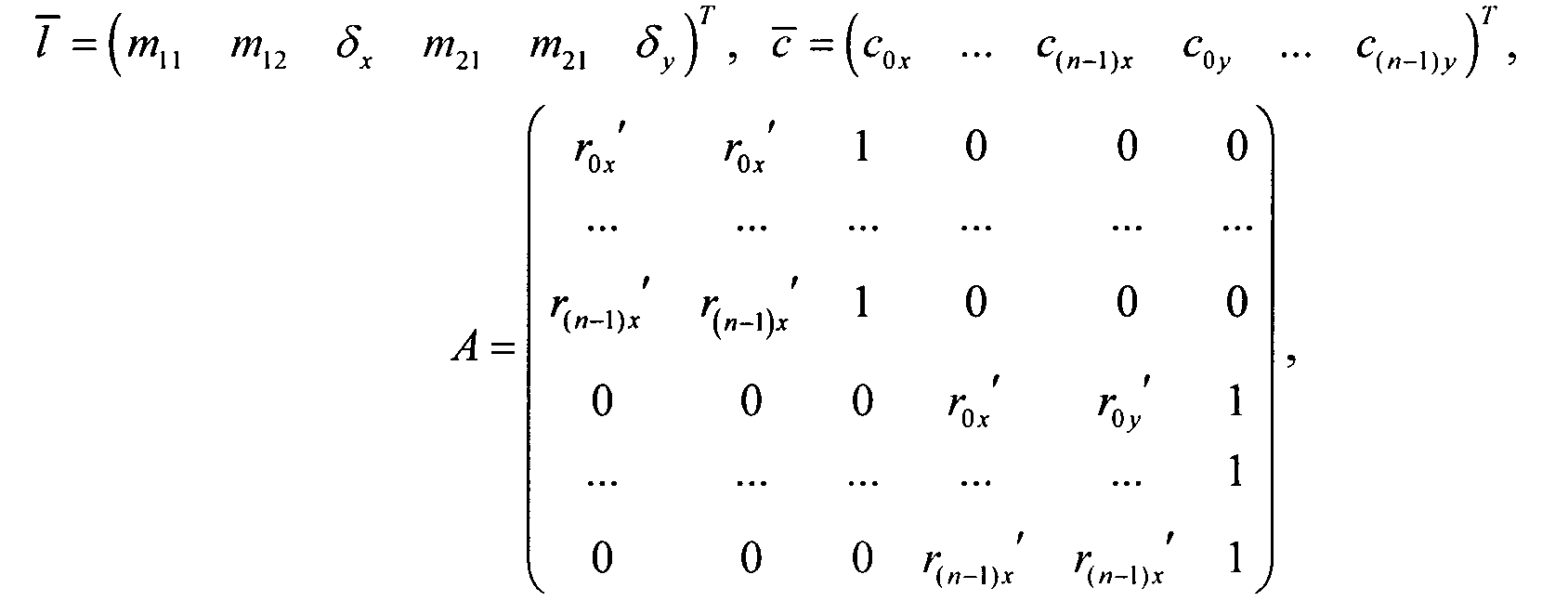
- отклик следящей антенной системы, далее формируют систему уравнений относительно неизвестного вектора  где:
где:
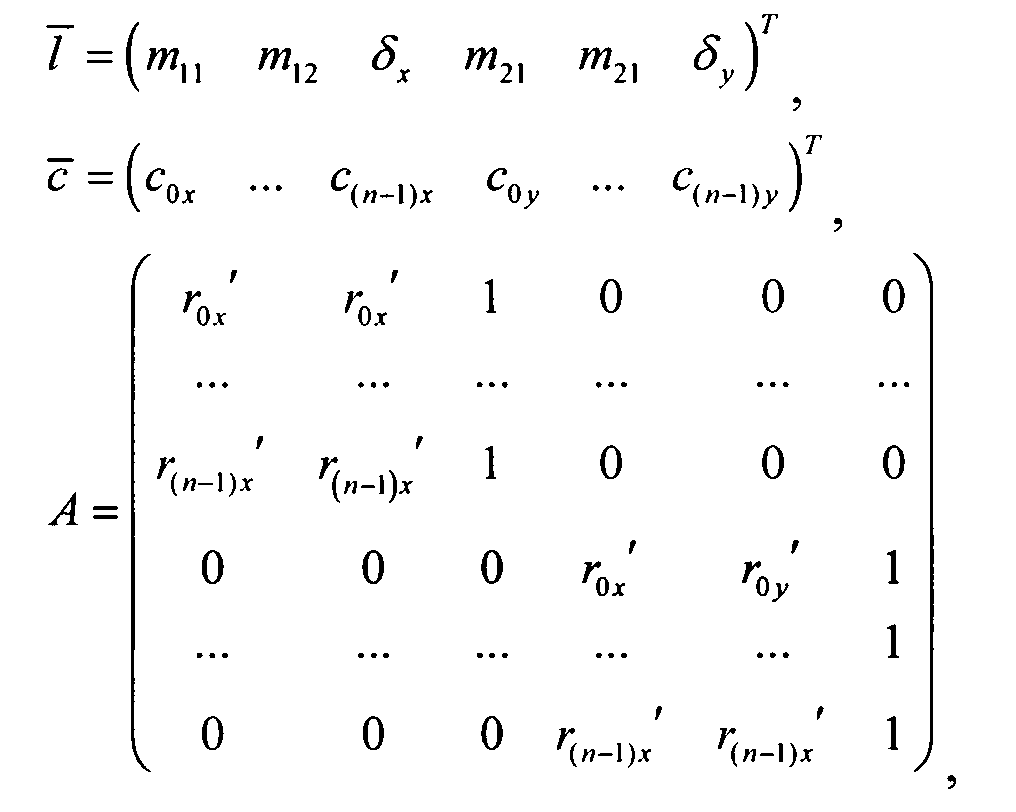
AT означает транспонированную матрицу A, решают данную систему уравнений, полученное значение вектора  выдают оператору, отклик следящей антенной системы в процессе управления домножают на матрицу
выдают оператору, отклик следящей антенной системы в процессе управления домножают на матрицу  и к нему прибавляют вектор
и к нему прибавляют вектор  для определения калибровочной характеристики, вектор содержит матрицу поворота
для определения калибровочной характеристики, вектор содержит матрицу поворота  перехода координат O'X'Y' в систему координат поправок OXY и вектор параллельного переноса
перехода координат O'X'Y' в систему координат поправок OXY и вектор параллельного переноса  системы координат, матрица М и вектор δ задают матрицу поворота и вектор параллельного сдвига, которые применяют к системе координат следящей антенной системы O'X'Y', чтобы перейти в систему координат управления O0X0Y0.
системы координат, матрица М и вектор δ задают матрицу поворота и вектор параллельного сдвига, которые применяют к системе координат следящей антенной системы O'X'Y', чтобы перейти в систему координат управления O0X0Y0.
В другом исполнении, для антенной следящей системы спутниковой связи ось X0 соответствует углу места главной оси антенны, а ось Y0 - азимуту.
Сущность и признаки заявленного изобретения в дальнейшем поясняются чертежами, где показано следующее.
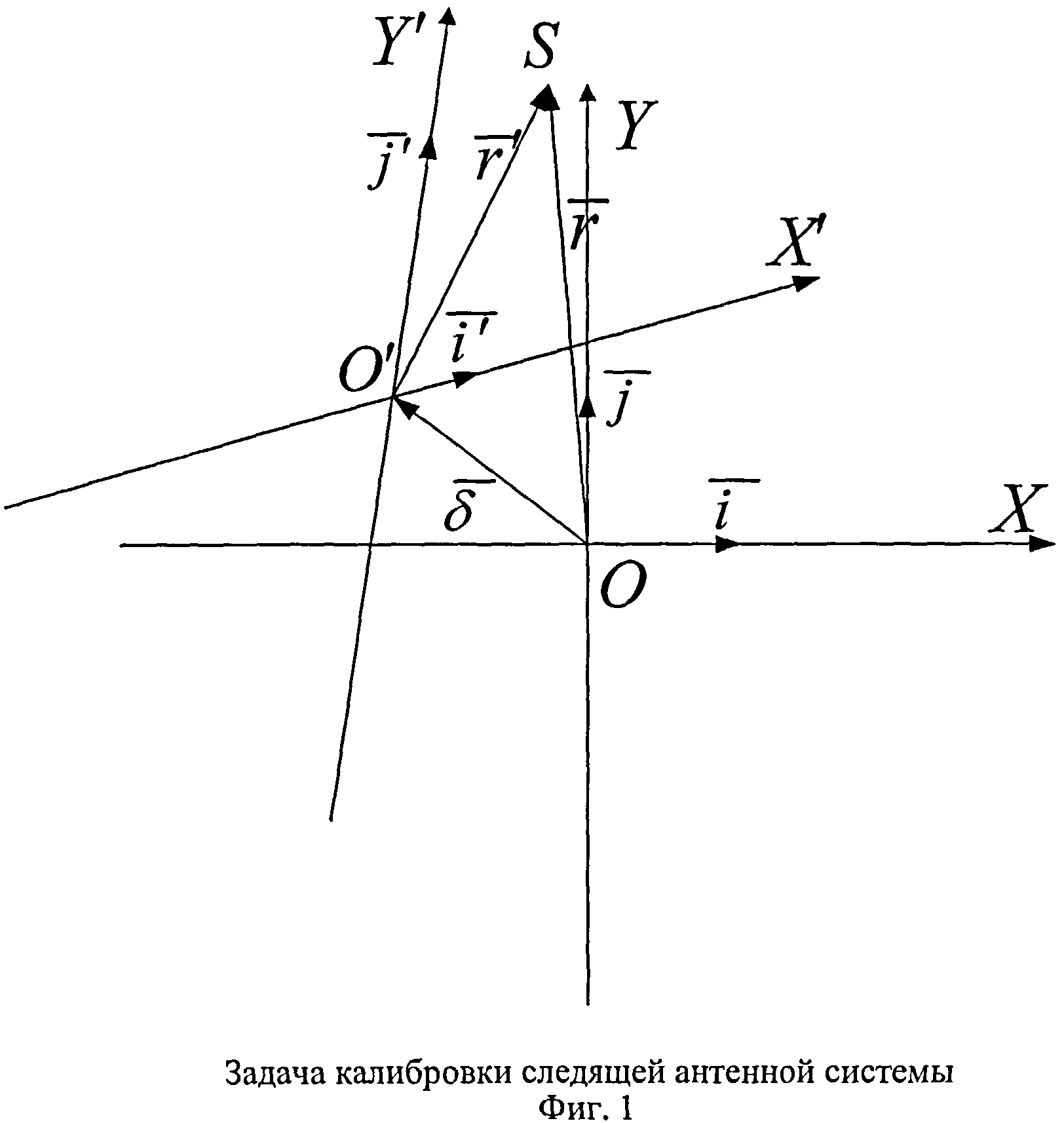
На фиг.1 - задача калибровки следящей антенной системы.
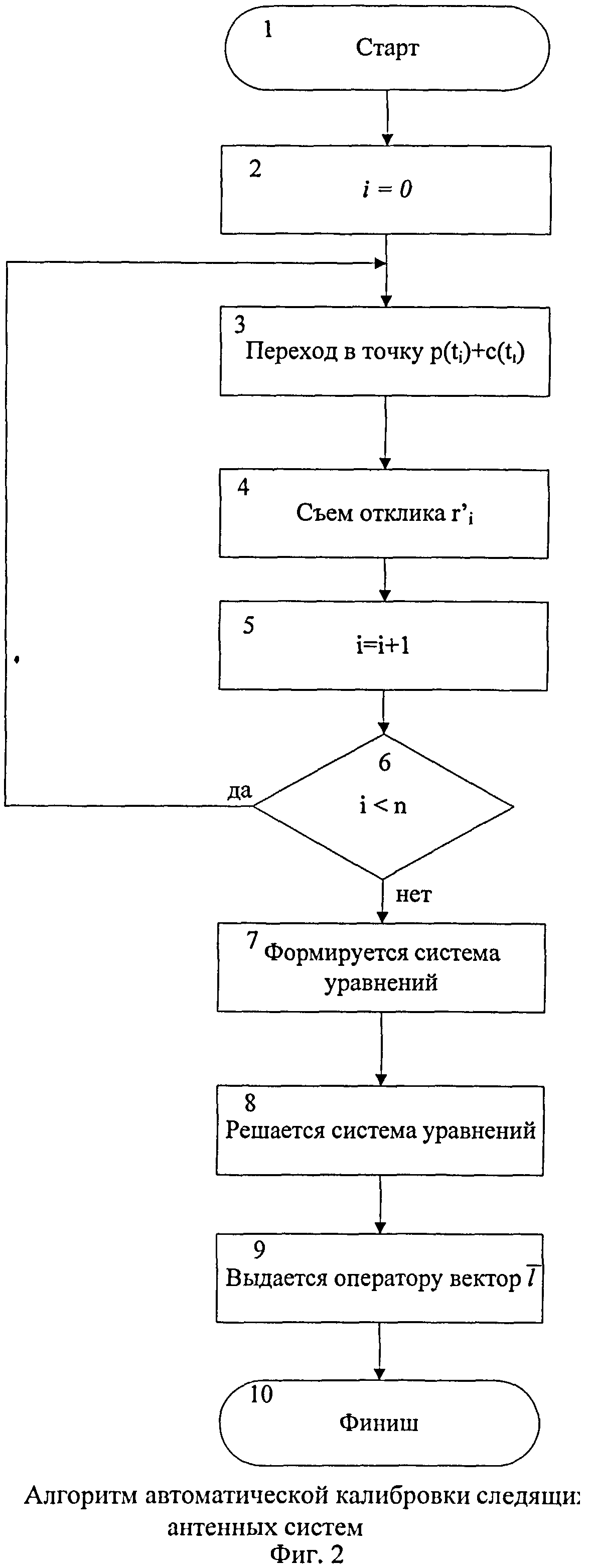
На фиг.2 - алгоритм автоматической калибровки следящих антенных систем, где:
1 - старт;
2 - i=0
3 - переход в точку p(ti)+c(ti);
4 - съем отклика r'i;
5 - увеличений i на единице (i=i+1);
6 - блок принятия решения (i<n);
7 - формирование матрицы;
8 - решается система уравнений;
9 - выдается операторы вектор
10 - финиш.
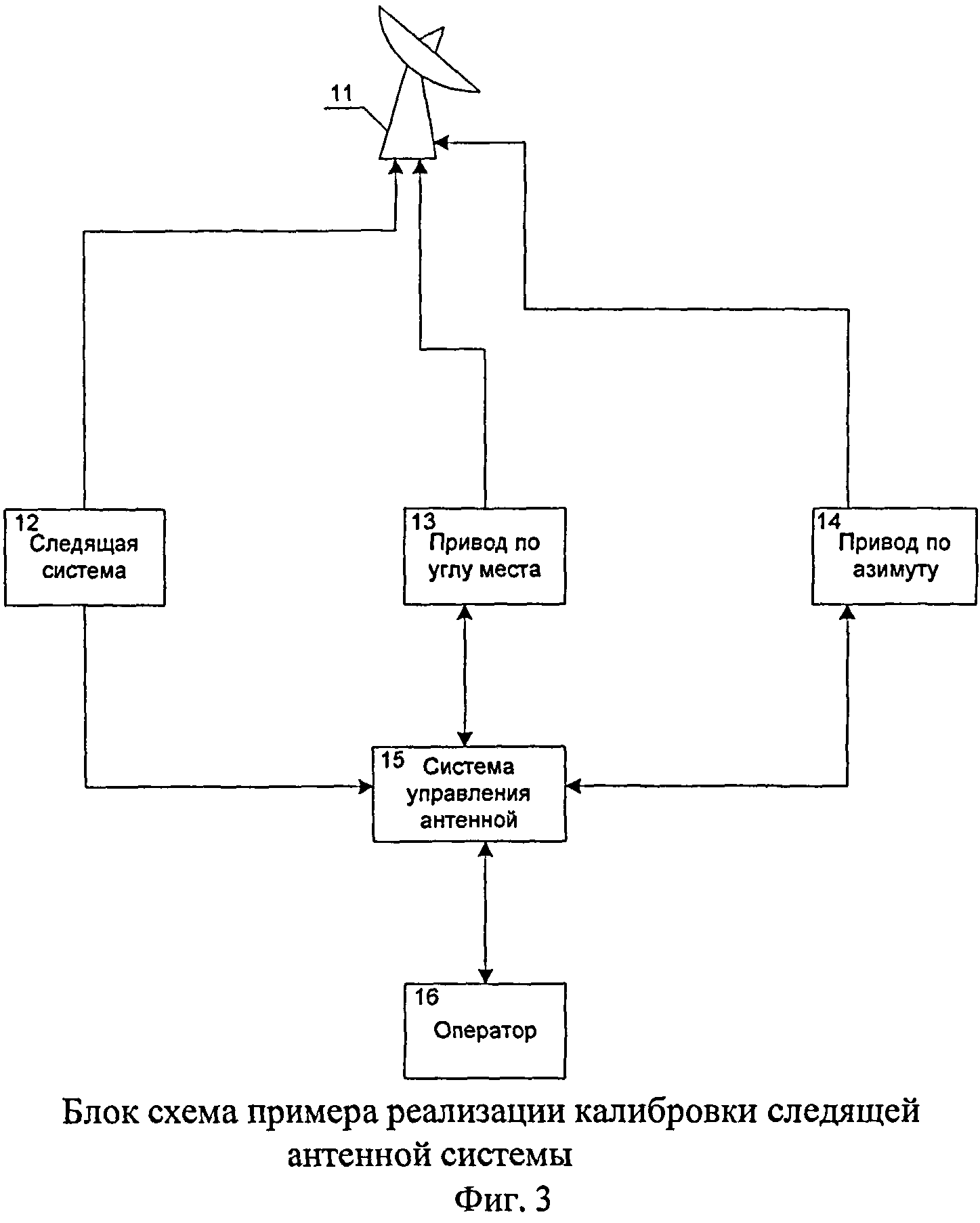
На фиг.3 - блок схема примера реализации калибровки следящей антенной системы, где:
11 - антенна;
12 - следящая система (СС);
13 - привод по углу места;
14 - привод по азимуту;
15 - система управления антенной;
16 - оператор.
Задача калибровки следящей антенной системы представлена на Фиг.1.
Здесь OXY - система координат поправок, связанная с главной осью системы - О, относительно которой осуществляется коррекция движения. В частности, для антенн спутниковой связи с азимутально-угломестным управлением ось X соответствует поправке к управлению по азимуту, а ось Y - поправке по углу места. Система координат О'Х'Y' является системой координат следящей системы. В системе координат О'Х'Y' осуществляется измерение величины  - ошибки положения источника сигнала S относительно главной оси О' следящей системы. Для корректного управления движением системы необходимо на основании величины
- ошибки положения источника сигнала S относительно главной оси О' следящей системы. Для корректного управления движением системы необходимо на основании величины  с использованием калибровочной характеристики F определить величину ошибки положения главной оси относительно источника сигнала
с использованием калибровочной характеристики F определить величину ошибки положения главной оси относительно источника сигнала  Иными словами,
Иными словами,
Задача калибровки следящей антенной системы заключается в определении функции F.
В общей постановке данная задача является весьма сложной. Предлагаемый способ калибровки предназначен для тех случаев, когда преобразование F является линейным. Данное предположение является хорошо обоснованным в тех случаях, когда диапазон измерения углов следящей антенной системой является весьма небольшим. Характерным примером такого рода следящей системы является система приемник автонаведения с вращающейся диаграммой направленности, применяемый в антеннах спутниковой связи.
Если преобразование из системы координат O'X'Y' в OXY является линейным, то калибровочная характеристика F может быть представлена следующим образом:

Здесь  - матрица перехода от системы координат O'X'Y в OXY, а
- матрица перехода от системы координат O'X'Y в OXY, а  - вектор параллельного переноса системы координат. Таким образом, задача калибровки следящей антенной системы сводится к определению матрицы М и вектора δ.
- вектор параллельного переноса системы координат. Таким образом, задача калибровки следящей антенной системы сводится к определению матрицы М и вектора δ.
Линейное преобразование  может быть представлено в виде последовательности преобразований параллельного сдвига, поворота и сжатий. Именно такое разложение зачастую используется при последовательной калибровке следящих антенных систем. При этом величины сдвига, поворота и сжатия определяются последовательно, что существенно увеличивает продолжительность калибровочных работ.
может быть представлено в виде последовательности преобразований параллельного сдвига, поворота и сжатий. Именно такое разложение зачастую используется при последовательной калибровке следящих антенных систем. При этом величины сдвига, поворота и сжатия определяются последовательно, что существенно увеличивает продолжительность калибровочных работ.
В заявленном способе величины  определяются одновременно. Последовательность действий при этом следующая:
определяются одновременно. Последовательность действий при этом следующая:
- По команде оператора (поз.1 и 2) начинается автоматическое определение калибровочной характеристики следящей антенной системы. При этом необходимо, чтобы на момент начала калибровки источник сигнала находился в линейном диапазоне измерений следящей антенной системы. В случае нахождения источника сигнала (ИС) в линейном диапазоне измерений следящей системы (поз.12) значение выходного сигнала следящей системы (поз.12) удовлетворяет выражению a=kb, где b - отклонение ИС от центра системы координат следящей системы O'X'Y', а - отклонение следящей системы, k - постоянный коэффициент пропорциональности (действительное число). Источник сигнала может быть как подвижным, так и неподвижным. В случае использования подвижного источника сигнала необходимо, чтобы на всем протяжении калибровки главная ось системы двигалась по расчетной программной траектории движения источника -  Здесь
Здесь  - вектор, определяющий расчетное положение источника сигнала в момент времени t в системе координат управления - O0X0Y0. В частности, для антенной системы спутниковой связи ось X0 соответствует углу места главной оси антенны, а ось Y0 - азимуту. В случае использования неподвижного юстировочного источника программная траектория
- вектор, определяющий расчетное положение источника сигнала в момент времени t в системе координат управления - O0X0Y0. В частности, для антенной системы спутниковой связи ось X0 соответствует углу места главной оси антенны, а ось Y0 - азимуту. В случае использования неподвижного юстировочного источника программная траектория  не зависит от времени и задает истинное положение юстировочного источника в системе координат управления.
не зависит от времени и задает истинное положение юстировочного источника в системе координат управления.
- В процессе калибровки к программной траектории  добавляется калибровочная траектория
добавляется калибровочная траектория  в дальнейшем процесс прохождения
в дальнейшем процесс прохождения  будем называть «калибровочным маневром». При этом главная ось системы совершает движение по траектории
будем называть «калибровочным маневром». При этом главная ось системы совершает движение по траектории  (поз.3). За счет формирования на СУА (поз.15) соответствующих управляемых воздействий на привод по углу места (поз.13) и привод по азимуту (поз.14).
(поз.3). За счет формирования на СУА (поз.15) соответствующих управляемых воздействий на привод по углу места (поз.13) и привод по азимуту (поз.14).
- На протяжении заданного калибровочного интервала Т с заданной периодичностью τ, например 10 p/с, в моменты времени t0,…,tn-1 снимаются измерения следящей антенной системы -  (поз.4 и 5). Здесь t0 - момент начала калибровки, ti+1=ti+τ и n=[T/τ]. Здесь i - номер точки калибровочного маневра. Значения отклонения сохраняются в СУА (поз.15).
(поз.4 и 5). Здесь t0 - момент начала калибровки, ti+1=ti+τ и n=[T/τ]. Здесь i - номер точки калибровочного маневра. Значения отклонения сохраняются в СУА (поз.15).
- По завершении калибровочного маневра (поз.6) в СУА (поз.15) формируются следующие наборы данных:
о - калибровочные положения главной оси системы. Здесь
- калибровочные положения главной оси системы. Здесь

о - отклик следящей антенной системы.
- отклик следящей антенной системы.
- Далее формируется следующая система уравнений (поз.7):
 где AT -транспонированная матрица A,
где AT -транспонированная матрица A,
относительно неизвестного вектора Данная система решается стандартным методом (поз.8), например методом Гаусса.
Данная система решается стандартным методом (поз.8), например методом Гаусса.
- Оператору выдается вектор (поз.9 и 10).
В случае если калибровочные положения  не лежат на одной прямой и n≥6, данная система уравнений обладает единственным решением, которое определяет линейное преобразование
не лежат на одной прямой и n≥6, данная система уравнений обладает единственным решением, которое определяет линейное преобразование  оптимальное с точки зрения метода наименьших квадратов. Если n существенно больше 6, то решение данной системы уравнений будет устойчивым даже в случае существенной случайной составляющей в измерениях
оптимальное с точки зрения метода наименьших квадратов. Если n существенно больше 6, то решение данной системы уравнений будет устойчивым даже в случае существенной случайной составляющей в измерениях  следящей антенной системы.
следящей антенной системы.
В дальнейшем, полученный вектор  используется СУА (поз.15) для коррекции отклика следящей системы (поз.12) при проведении штатных сеансов связи, а именно отклик следящей системы в процессе управления домножается на матрицу
используется СУА (поз.15) для коррекции отклика следящей системы (поз.12) при проведении штатных сеансов связи, а именно отклик следящей системы в процессе управления домножается на матрицу  и прибавляется к вектору параллельного переноса системы координат
и прибавляется к вектору параллельного переноса системы координат  для определения калибровочной характеристики.
для определения калибровочной характеристики.
Матрица и вектор параллельного переноса системы координат определяют взаимосвязь системы координат поправок OXY и системы координат следящей системы O'X'Y'. Переход из системы координат следящей системы O'X'Y' в систему координат поправок OXY осуществляется по формуле  в процессе проведения сеансов связи.
в процессе проведения сеансов связи.
Таким образом, заявленный способ калибровки позволяет с высокой скоростью, надежностью и точностью определять калибровочные характеристики следящих антенных систем. При этом данный способ может использоваться как с применением неподвижного юстировочного источника, так и с применением сигнала от подвижного источника с известной расчетной траекторией. Также заявленный способ позволяет осуществлять точную калибровку следящих антенных систем даже в случае наличия существенной случайной составляющей в измерениях.
Литература
1. P. Soma and K. Nageswara Rao, "Estimation of Systematic errors in Angles of Tracking Antenna", Paper presented at SPACE-OPS 96, International Symposium Mission Operations and Ground Data Systems, September 16-20, 1996 held at Munich Germany.
2. Takeshi Sasaki and Hideki Hashimoto, «Object Tracking for Calibration of Distributed Sensors in Intelligent Space», http://www.intechopen.com/books/object-tracking/object-tracking-for-calibration-of-distributed-sensors-in-intelligent-space.



Устройство формирования частоты сигнала, автоматически устраняющее возникающие неисправности за минимальное время
Устройство деления и извлечения квадратного корня
Автономный пункт приема гелиогеофизической информации
Способ изготовления микроэлектромеханических реле
Цифровой измеритель частоты
Микросистемное устройство терморегуляции поверхности космических аппаратов
Система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы
Микромеханическая система
Способ одновременного определения шести параметров движения космического аппарата при проведении траекторных измерений и система для его реализации
Солнечная батарея для малоразмерных космических аппаратов и способ ее изготовления
Устройство формирования частоты сигнала, автоматически устраняющее возникающие неисправности за минимальное время
Устройство деления и извлечения квадратного корня
Автономный пункт приема гелиогеофизической информации
Способ изготовления микроэлектромеханических реле
Цифровой измеритель частоты
Микросистемное устройство терморегуляции поверхности космических аппаратов
Система автоматического управления работой модема малоразмерного космического аппарата с наземным центром управления полетами спутниковой связной системы
Микромеханическая система
Способ одновременного определения шести параметров движения космического аппарата при проведении траекторных измерений и система для его реализации
Солнечная батарея для малоразмерных космических аппаратов и способ ее изготовления

