Результат интеллектуальной деятельности: УПРАВЛЯЕМЫЙ РАЗБАЛАНС ГЕНТРИ
Вид РИД
Изобретение
Описанное ниже относится к системам формирования изображений и находит конкретное применение при получении изображений с использованием компьютерной томографии (КТ). Однако оно также может использоваться в других применениях для получения медицинских изображений и немедицинских изображений.
Сканер компьютерной томографии в целом содержит рентгеновскую трубку и детекторную матрицу, которая обнаруживает излучение, испускаемое рентгеновской трубкой. Рентгеновская трубка и детекторная матрица крепятся на роторе на противоположных сторонах области исследования. Ротор установлен с возможностью вращения на неподвижной раме и вращается вокруг продольной оси и вокруг области исследования, вращая тем самым рентгеновскую трубку и детекторную матрицу вокруг области исследования. Опора для пациента поддерживает объект или субъекта в области исследования. Грузы избирательно размещаются на роторе, чтобы балансировать массу ротора. Обычно грузы неподвижно крепятся к ротору во время изготовления. К сожалению, если масса не сбалансирована, радиальные силы, действующие на компоненты, прикрепленные к ротору, имеют тенденцию заставлять ротор при вращении колебаться, что нежелательно. Степень колебания зависит от различных факторов, таких как степень разбаланса, скорость вращения ротора, жесткость опорной конструкции и т.д.
По мере того, как ротор и, следовательно, рентгеновская трубка вращаются вокруг области исследования, рентгеновская трубка из фокального пятна испускает излучение, которое пересекает область исследования и объект или субъект, расположенный в ней, и падает на детекторную матрицу. Коллиматор источника используется для коллимирования излучения таким образом, чтобы пучок излучения, обычно в форме конуса, веера или клина, пересекал область исследования. При компьютерной томографии с конусным пучком, чтобы реконструировать интересующий объем (VOI), требуется полная выборка интересующего объема без артефакта конусного пучка. Однако традиционные способы сканирования при компьютерной томографии с конусным пучком, которые используют круговую траекторию источника излучения вокруг области исследования, неспособны обеспечить полную выборку. Вместо этого результирующий набор данных является неполным из-за того, что выборка некоторых частей VOI является неполной.
Один из подходов к получению полной выборки при использовании круговой траектории для компьютерной томографии с конусным пучком должен состоять в выполнении круговых и линейных сканирований с последующим объединением их вместе.
Однако это требует многочисленных сканирований, которые могут увеличить время сканирования, артефакт движения и дозу для пациента. При альтернативном подходе источник излучения следует по седловидной траектории, чтобы достигнуть осуществления полной выборки VOI. Такая траектория описывается в документе "Investigation of a saddle trajectory for cardiac CT imaging in cone-beam geometry," под авторством Pack и др., Phys. Med. Biol., том 49, № 11 (2004) стр. 2317-2336. К сожалению, чтобы добиться этой траектории, во время процедуры сканирования рентгеновская трубка, фокальное пятно и/или пациент должны двигаться вперед-назад вдоль оси z.
Рассмотренные здесь аспекты направлены на решение описанных выше и/или других проблем.
Согласно одному аспекту система формирования изображений содержит неподвижную раму и поворотную раму, шарнирно закрепленную на неподвижной раме и выполненную с возможностью поворота вокруг поперечной оси. Вращающаяся рама установлена с возможностью вращения на поворотной части и выполнена с возможностью вращения вокруг продольной оси и вокруг области исследования и балансир вращающейся рамы избирательно вводит разбаланс массы вращающейся рамы. Источник излучения прикреплен к вращающейся раме и испускает излучение из фокального пятна, причем излучение пересекает область исследования. Детекторная матрица обнаруживает излучение, которое пересекает область исследования, и генерирует указывающий на это сигнал.
В соответствии с другим аспектом способ содержит избирательно создаваемый разбаланс массы вращающейся рамы, при этом вращающаяся рама является частью системы формирования изображений и поддерживает источник излучения системы формирования изображений.
В соответствии с другим аспектом устройство, создающее разбаланс массы вращающейся рамы, содержит опору, выполненную с возможностью крепления к вращающейся раме, подвижную массу, выполненную с возможностью крепления к опоре, электродвигатель, который приводит в движение опору, и контроллер, приводящий в действие электродвигатель, чтобы перемещать опору, которая перемещает подвижную массу между по меньшей мере первым положением и вторым положением, причем первое положение соответствует первому разбалансу массы.
Изобретение может быть выполнено в виде различных компонентов и сочетаний компонентов и в виде различных этапов и сочетаний этапов. Чертежи служат только для целей иллюстрирования предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
Фиг.1 - система формирования изображений.
Фиг.2 - пример балансира вращающейся рамы.
Фиг.3-6 - пример введения разбаланса.
Фиг.7 - относительные положения балансира вращающейся рамы и источника излучения.
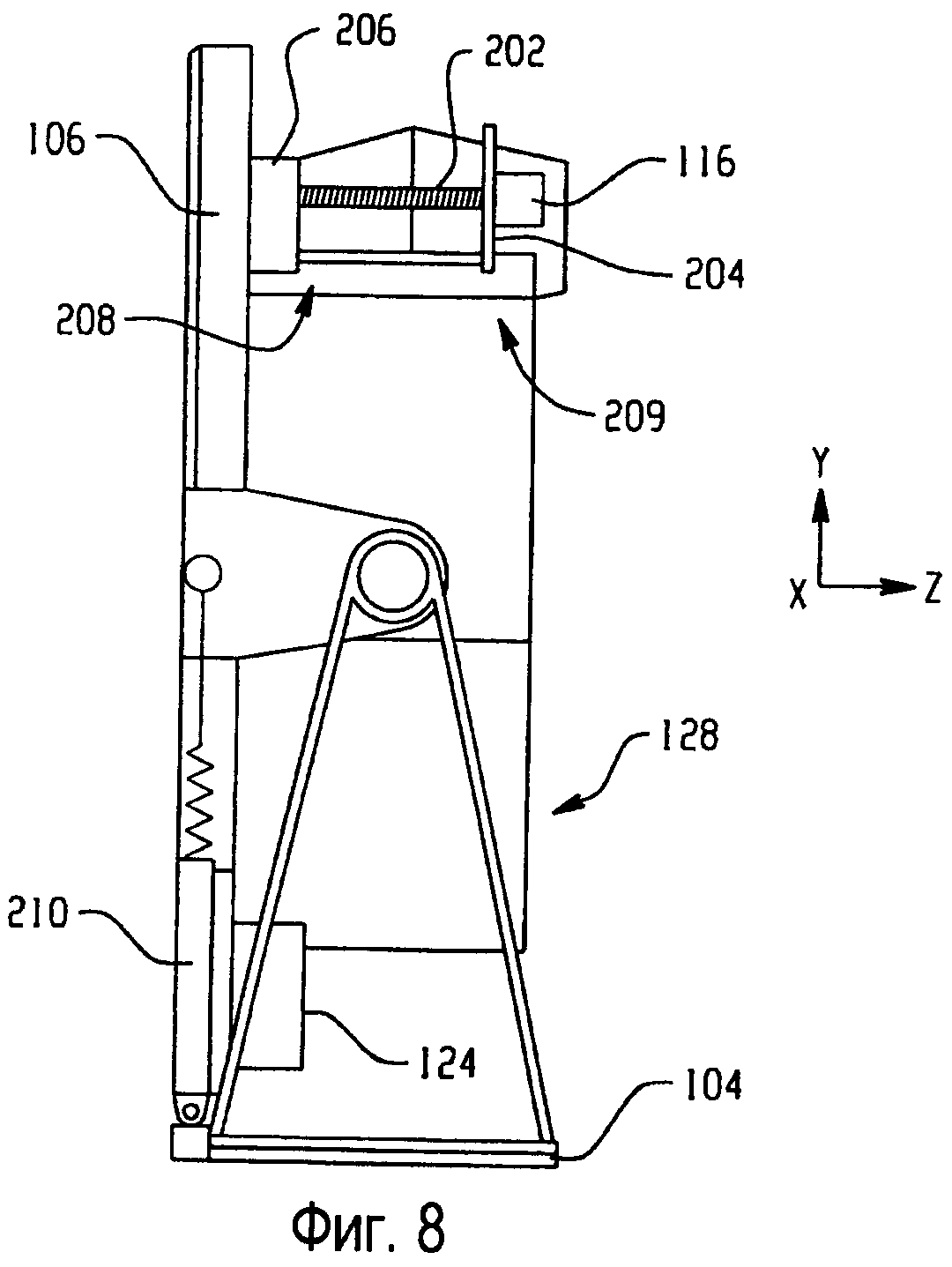
Фиг.8 - пример, в котором вращающаяся рама сбалансирована.
Фиг.9-11 - примеры способов.
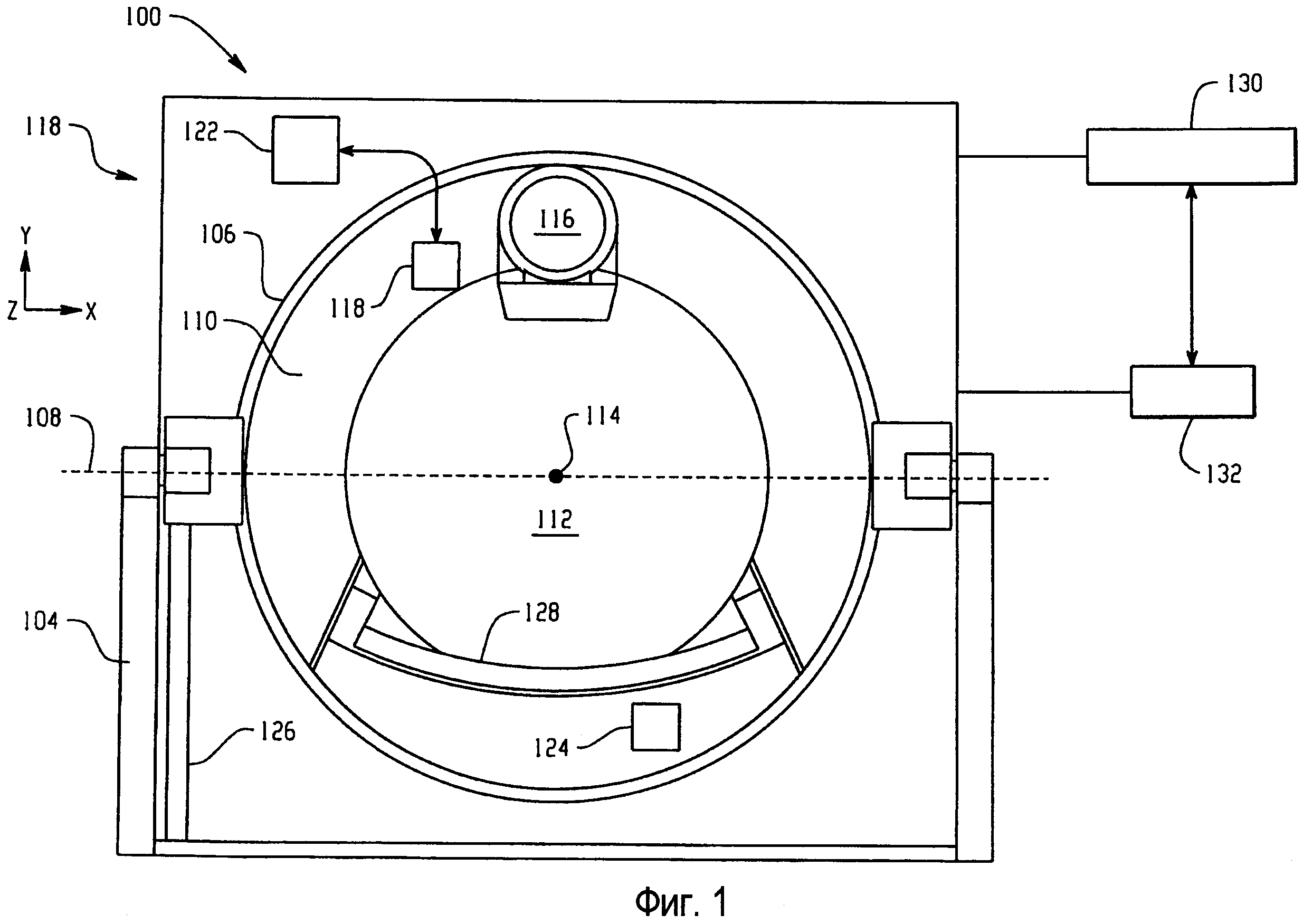
На Фиг.1 представлен сканер или система 100 формирования изображений, содержащая неподвижную раму 104 и выполненную с возможностью поворота или поворотную раму 106, которая шарнирно закреплена на неподвижной раме 104 и выполнена с возможностью шарнирного поворота вокруг поперечной оси 108 или оси х.
Система формирования изображений также содержит вращающуюся раму 110, которая установлена с возможностью вращения на поворотной раме 106 через опору или подобный элемент. Вращающаяся рама 110 вращается вокруг области 112 исследования вокруг продольной оси 114 или оси z и шарнирно поворачивается с помощью поворотной рамы 106 вокруг стержня 108.
Источник 116 излучения, такой как рентгеновская трубка, присоединяется и вращается и шарнирно поворачивается с помощью вращающейся рамы 110. По мере вращения вращающейся рамы 110 источник 116 излучения может испустить излучение из фокального пятна, которое следует траектории сканирования. Подходящими траекториями сканирования являются, в частности, седловидная, круговая и эллиптическая траектории сканирования. Коллиматор источника используется для коллимирования излучения таким образом, чтобы в целом конусный, веерный, клиновидный или имеющий какую-либо другую форму пучок излучения пересекал область 112 исследования.
Балансир 118 вращающейся рамы контролируемым образом поворачивает вращающуюся раму 110 и, следовательно, источник 116 излучения вокруг оси 114 z. В одном случае балансир 118 вращающейся рамы контролируемым образом поворачивает вращающуюся раму 110, чтобы во время сканирования перемещать фокальное пятно по заданной траектории, в том числе по одной из упомянутых выше траекторий, такой как седловидная траектория. Также, когда система 100 выполнена с возможностью сканирования конусным пучком, может быть получен полный набор данных для целей реконструирования.
Балансир 118 вращающейся рамы контролируемым образом поворачивает вращающуюся раму 110, вводя управляемый разбаланс массы вращающейся рамы. Как ниже описано более подробно, это может быть достигнуто избирательным перемещением подвижной массы, прикрепленной к вращающейся раме 110, вдоль оси 114 z. В одном случае, как следствие, динамические разбалансы вращающейся рамы 110 обеспечивают естественную седловидную траекторию возбуждением этого естественного движения, используя конкретно размещенную массу или разбаланс, настроенный на свойства массы поворотной рамы 106 и жесткость основания 104.
Контроллер или компонент 122 управления управляет балансиром 118 вращающейся рамы. Такое управление может основываться на выбранном протоколе сканирования и/или на чем-либо другом. Компонент 122 управления может быть частью балансира 118 вращающейся рамы или отдельным компонентом, как показано на чертеже. Для считывания положения подвижной массы, вращающейся рамы 114, неподвижной рамы 104 и/или других компонентов системы могут использоваться один или более датчиков. Такая считываемая информация может использоваться в контуре обратной связи и/или как-либо иначе и/или использоваться для облегчения управления подвижной массой.
Поясняемый вариант осуществления также содержит противовес 124, который может использоваться в качестве противовеса подвижной массы, например, когда подвижная масса находится в конкретном положении, чтобы балансировать массу вращающейся рамы 110. Показанный вариант осуществления также содержит демпфер 126, облегчающий шарнирный поворот вращающейся рамы 110.
Детекторная матрица 128 крепится к вращающейся раме 110 и охватывает угловую дугу, лежащую напротив источника 116 излучения, против области 112 исследования. Детекторная матрица 128 содержит одну или более строк пикселей, чувствительных к излучению, которые расположены вдоль поперечного направления. Пикселы, чувствительные к излучению, обнаруживают излучение, пересекающее область 112 исследования, и, соответственно, генерируют указывающий на это сигнал.
Блок 130 реконструкции реконструирует сигналы, генерируемые детекторной матрицей 128, и формирует объемные данные изображения, показывающие область 112 исследования.
Опора для пациента (не показана), такая как кушетка, поддерживает пациента в области 112 исследования. Опора для пациента может перемещаться вдоль осей x, y и/или z.
Компьютерная система общего назначения служит в качестве консоли 132 оператора, которая содержит устройства ввода и пригодные для считывания человеком устройства вывода, такие как клавиатура и/или "мышь" и дисплей и/или принтер. Программное обеспечение, постоянно присутствующее в компьютерной системе, управляет работой системы 100, например, посредством обеспечения команд по разбалансу вращающейся рамы через выбранный пользователем протокол сканирования и/или как-либо иначе.
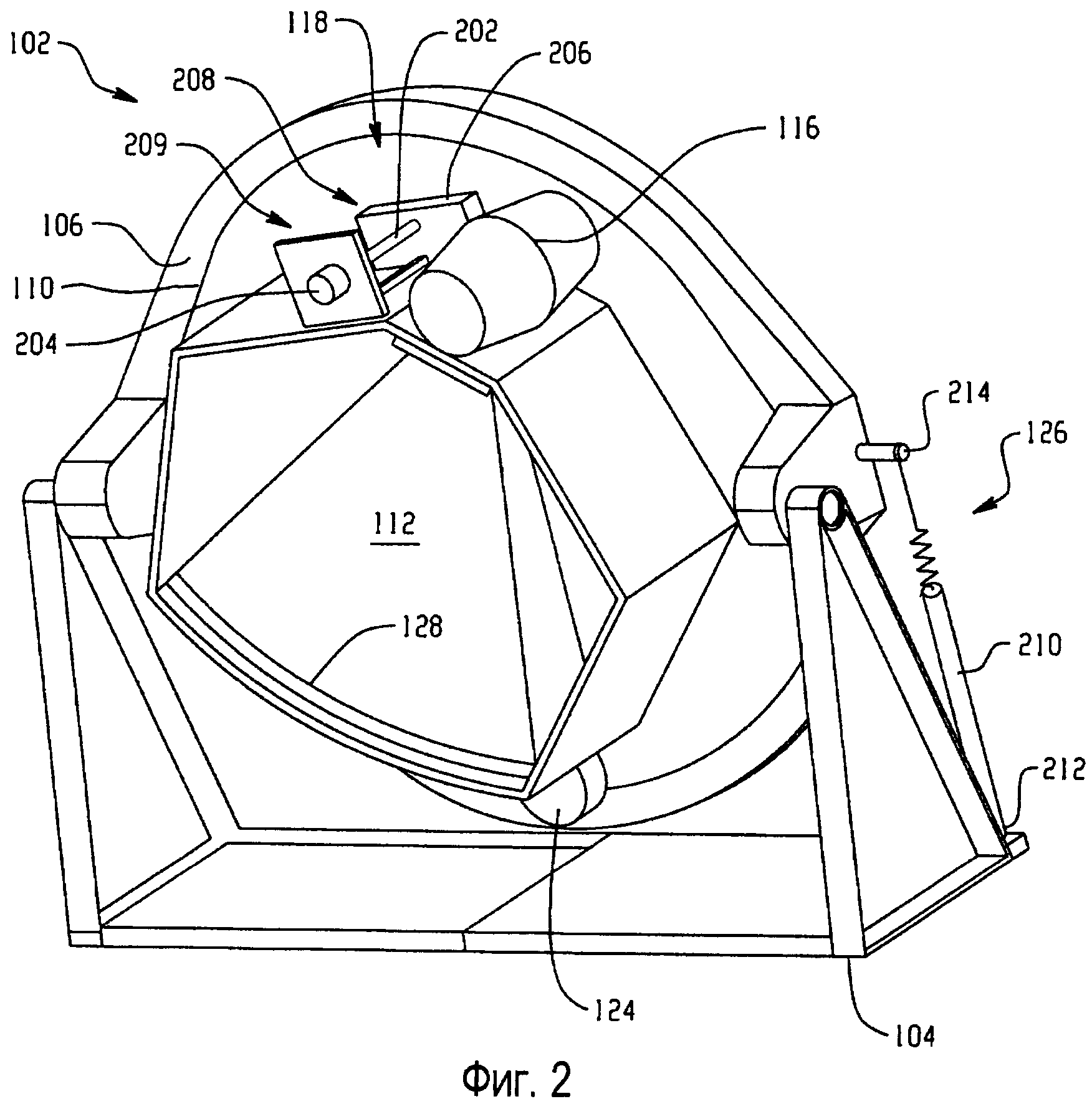
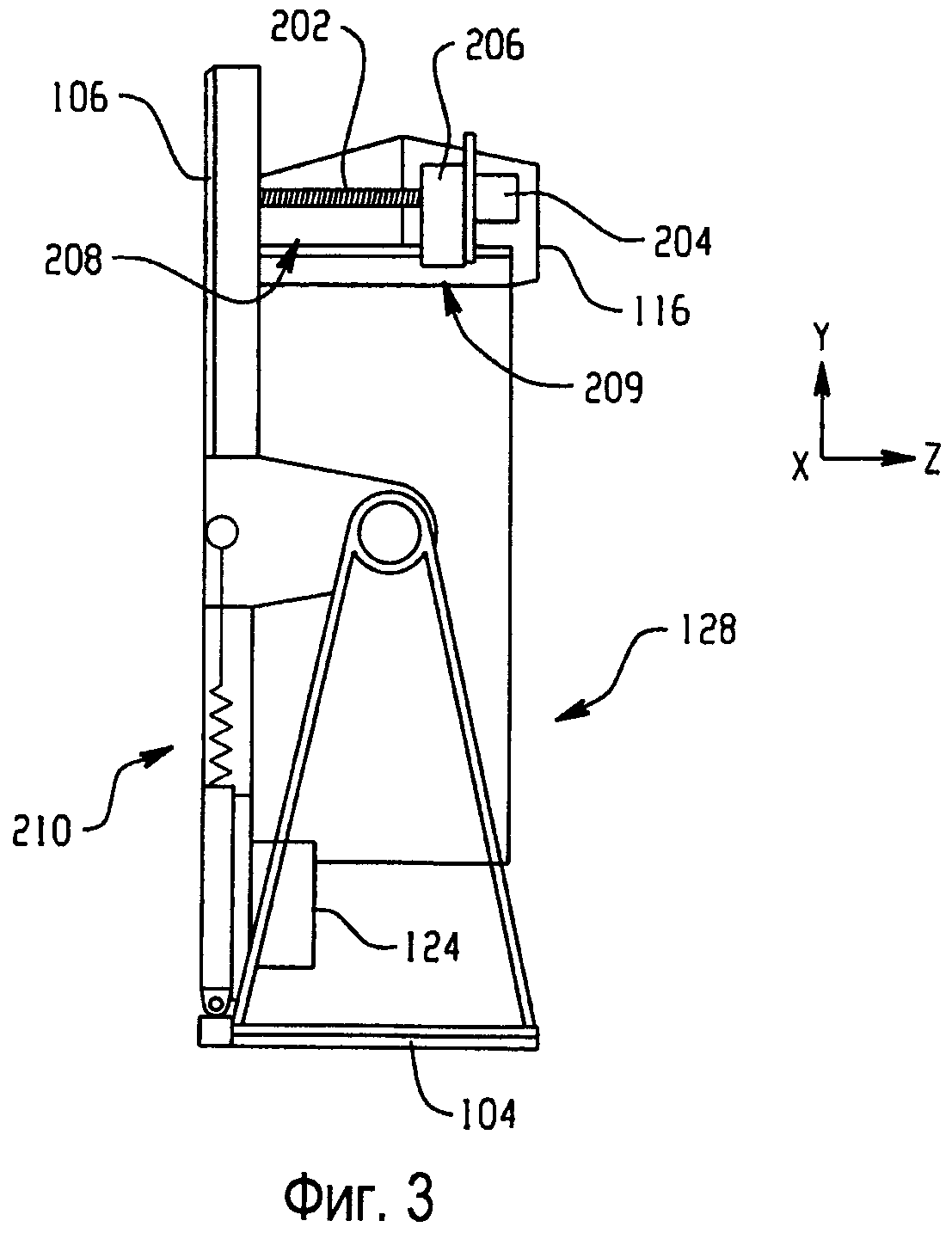
На Фиг.2 представлен не создающий ограничения пример балансира 118 вращающейся рамы. В этом примере балансир 118 вращающейся рамы содержит опору 202, прикрепленную к вращающейся раме 110 и проходящую через нее вдоль оси 114 z, электродвигатель 204 и т.п., приводящий в движение опору 202, и подвижную массу 206, прикрепленную к опоре 202 и которая сдвигается вдоль оси 114 z. Опора 202 может быть любым типом опоры, в том числе, в частности, подшипником скольжения, ходовым винтом, шарикоподшипником и т.д.
Компонент 122 управления передает управляющий сигнал, указывающий положение подвижной массы 206 вдоль оси 114 z, на электродвигатель 204. В ответ электродвигатель 204 приводит в движение опору 202, которая сдвигает подвижную массу 206 в соответствующее положение. К соответствующим положениям относятся первое положение 208 вблизи вращающейся рамы 110, второе положение 209, относительно более далекое от вращающейся рамы 110, и/или одно или более положений между ними. По меньшей мере, одно из положений балансирует массу, и, по меньшей мере, другое положение вносит управляемый разбаланс массы.
В представленном варианте осуществления противовес 124 располагается на вращающейся раме 110 напротив балансира 118 вращающейся рамы, против области 112 исследования. В показанном примере вращающаяся рама 110 балансируется, по существу, когда подвижная масса 206 располагается в первом положении, и разбалансируется, когда подвижная масса располагается в другом положении. Степень разбаланса регулируется избирательным сдвигом подвижной массы 206 вдоль оси 114 z.
Демпфер 126 содержит пружинный механизм 210, имеющий первый концевой участок 212, прикрепленный к основанию 104, и второй концевой участок 214, прикрепленный к поворотной раме 106. Показанный вариант осуществления содержит два демпфера 126. Однако следует понимать, что другие варианты осуществления могут содержать один или больше чем два демпфера 126. Кроме того, дополнительно или альтернативно могут использоваться другие демпферы, такие как амортизаторные, поршневые и т. д.
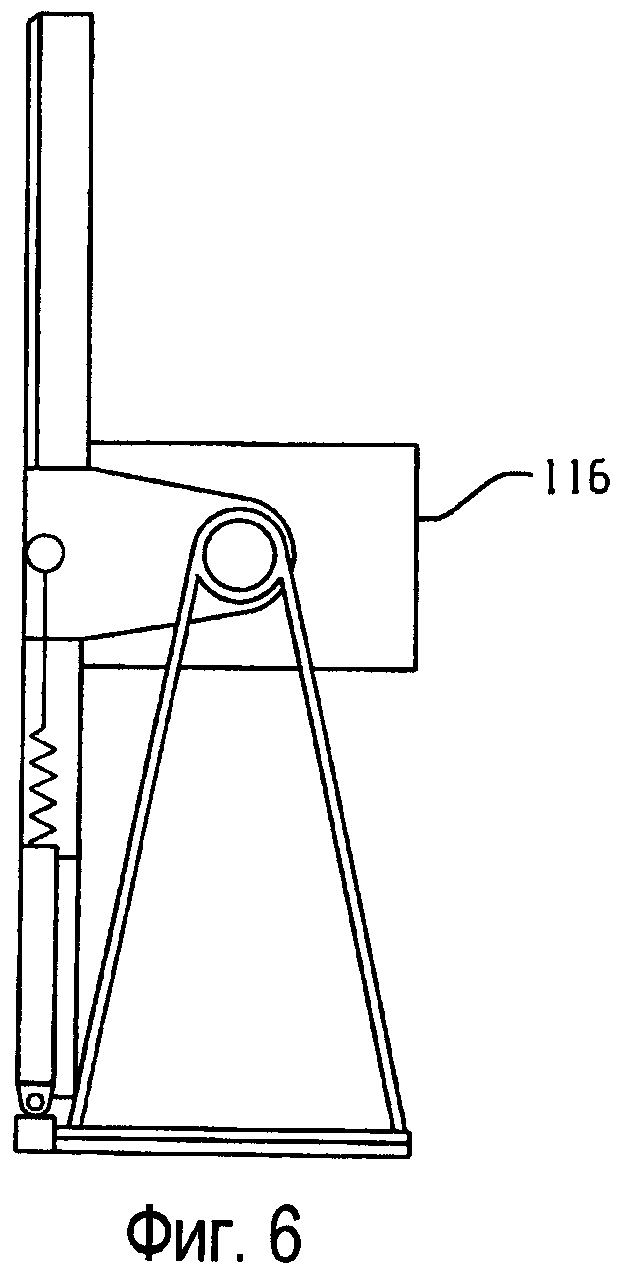
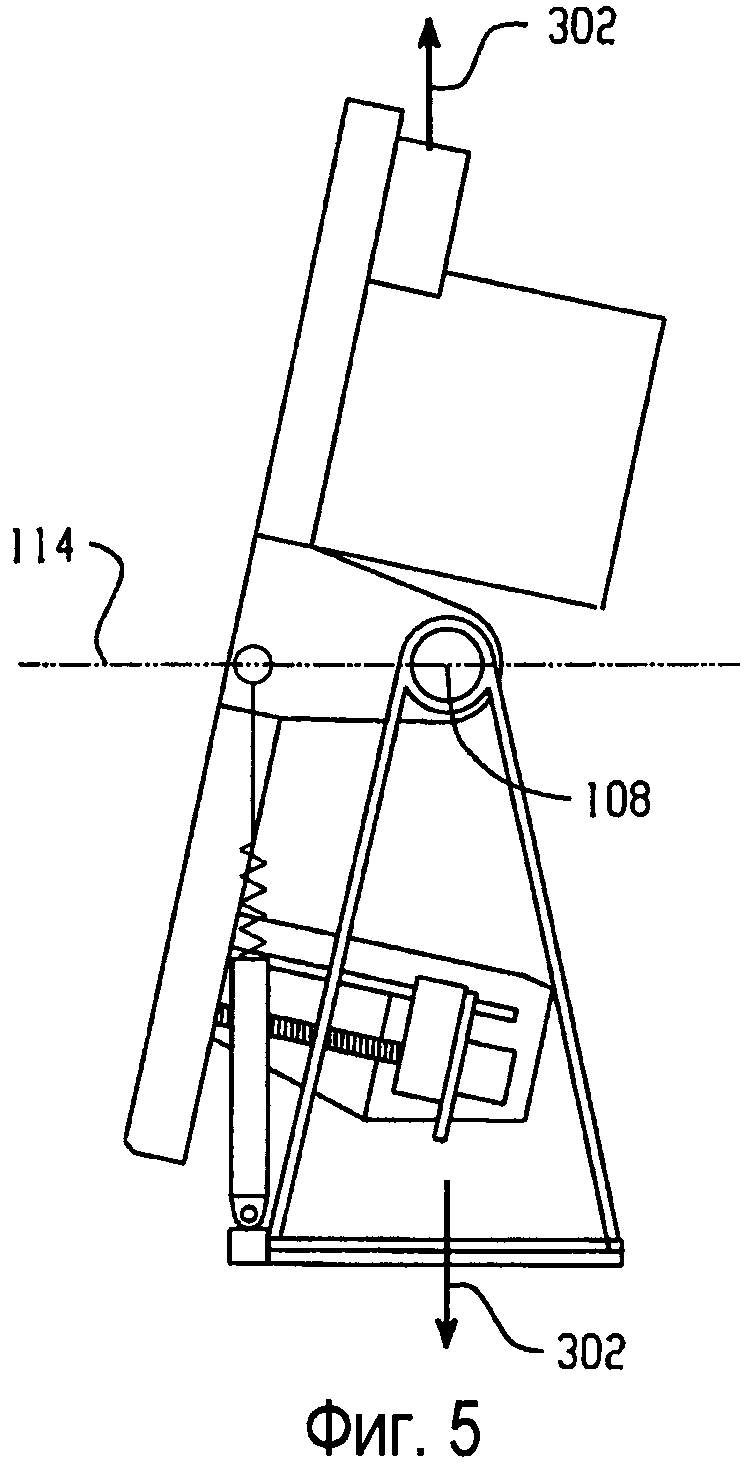
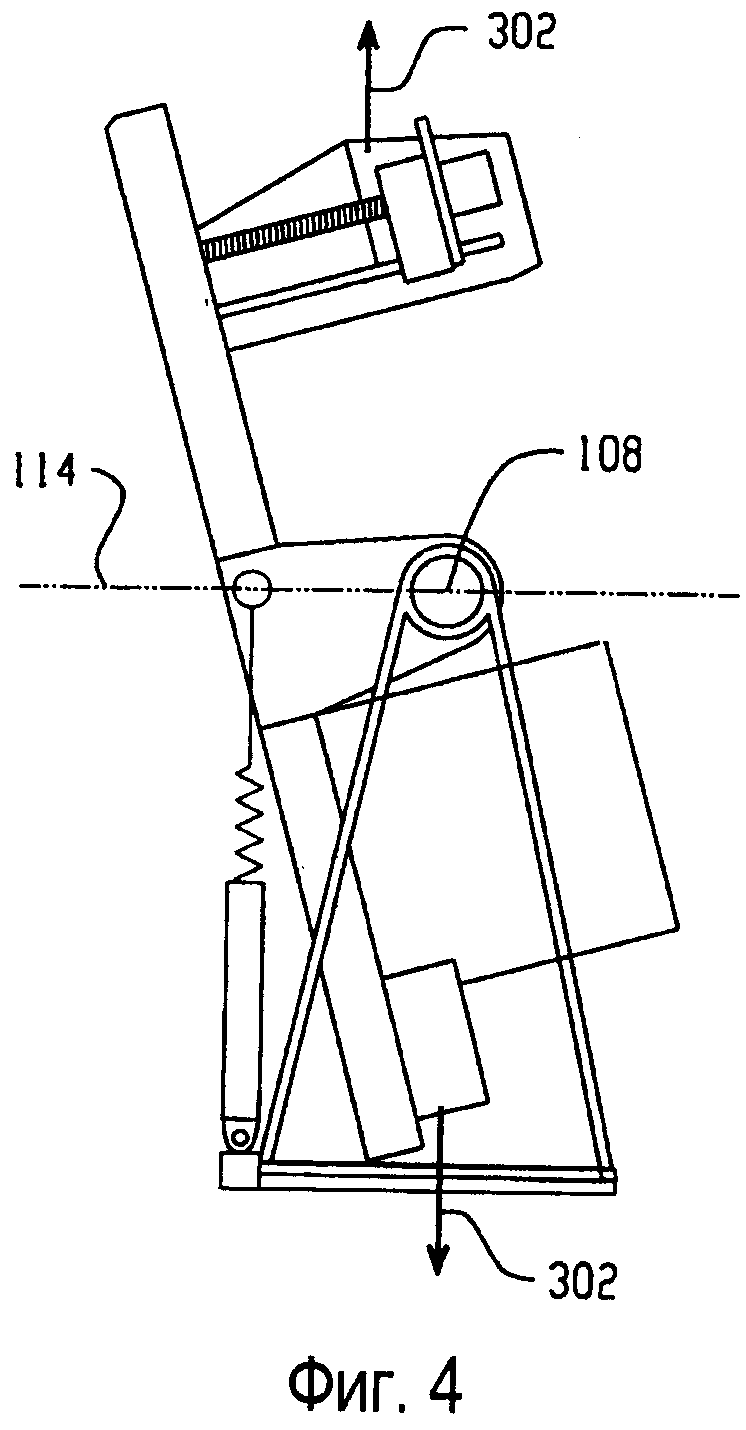
На Фиг.3, 4, 5 и 6 представлены виды сбоку системы 100 формирования изображений. На Фиг.3 показана стационарно вращающаяся рама 110 с подвижной массой 206, расположенной приблизительно во втором положении 209. Также в этом примере подвижная масса 206 и масса 124 находятся вне плоскости относительно друг друга и вращающаяся рама 110 не сбалансирована или разбалансирована.
На Фиг. 4, 5 и 6 показан шарнирный поворот вращающейся рамы 110, когда подвижная масса 206 находится приблизительно во втором положении 209 (как показано на Фиг.3) и вращающаяся рама 110 вращается в трех разных угловых положениях. На Фиг.4 показана вращающаяся рама 110, когда источник 116 излучения располагается приблизительно в самом верхнем положении (12 час) или под углом 0 градусов. При массах 206 и 124, расположенных вне плоскости друг от друга, радиальные силы, 302, действующие на массы 206 и 124, имеют тенденцию заставлять вращающуюся раму 110 поворачиваться вокруг оси 108 x в первом направлении вдоль оси 114 z.
На Фиг.5 показана вращающаяся рама 110, когда источник 116 излучения располагается приблизительно в самом низу (0 час) или повернут на 180 градусов относительно самого верхнего положения (12 час). И опять, когда массы 206 и 124 находятся вне плоскости друг друга, радиальные силы 302, действующие на массы 206 и 124, имеют тенденцию заставлять вращающуюся раму 110 поворачиваться вокруг оси 108 x. В самом нижнем положении (6 час), однако вращающаяся рама 110 поворачивается во втором направлении, которое противоположно первому направлению, вдоль оси 114 z.
На Фиг.6 представлена вращающаяся рама 110, когда источник 116 излучения располагается приблизительно в промежуточном положении (9 час). Как видно на чертеже, когда источник излучения находится в этом положении, вращающаяся рама 110 не поворачивается. В одном случае жесткость опорной рамы, по существу, демпфирует или погашает радиальные силы 302. Аналогично, когда источник 116 излучения располагается приблизительно в другом промежуточном положении (3 час), вращающаяся рама 110 не поворачивается.
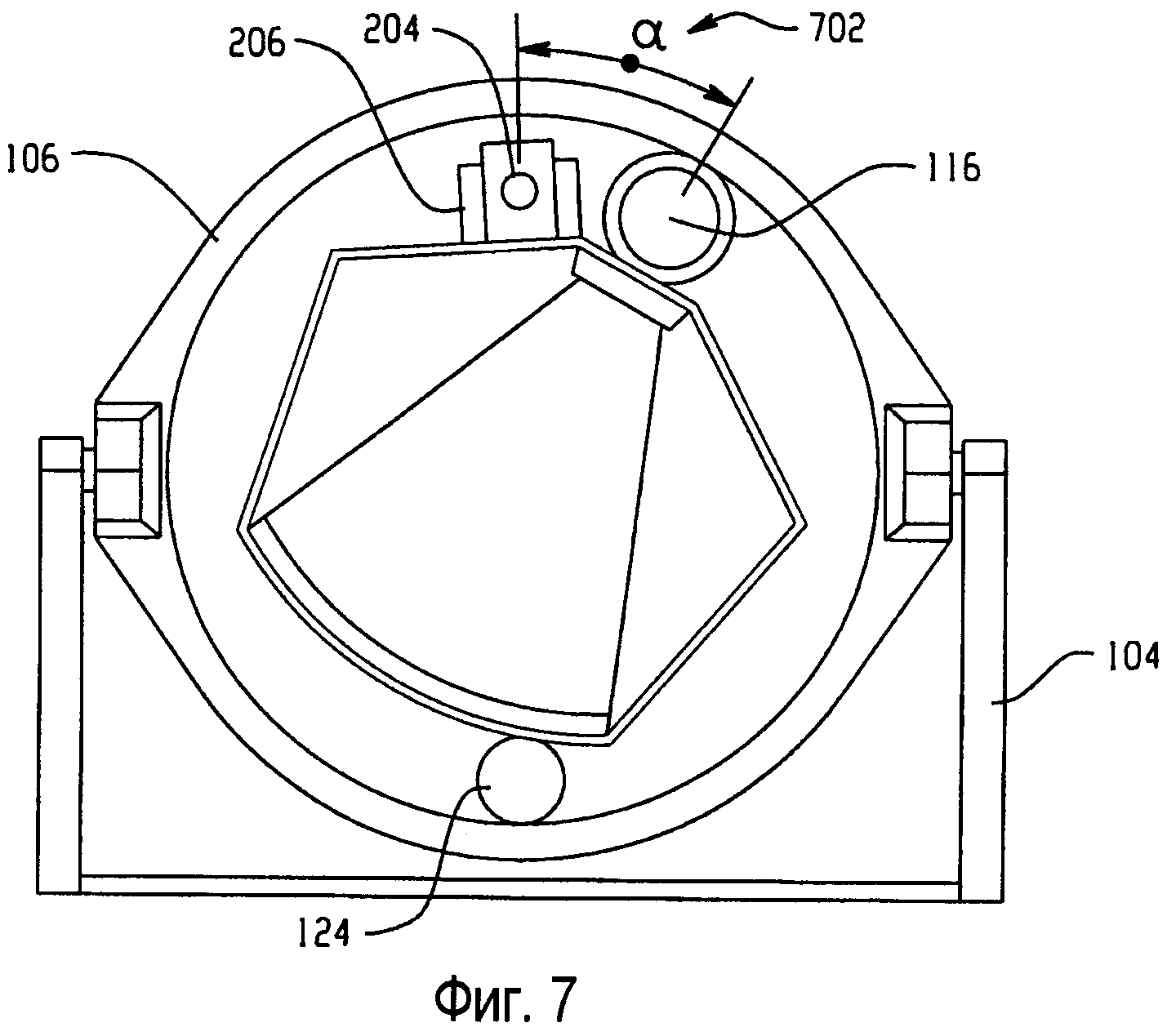
На Фиг.7 представлен не предназначенный для создания ограничения пример размещения масс 206 и 124 на вращающейся раме 110. Для Фиг.7 предположим, что вращающаяся рама 110 вращается в направлении против часовой стрелки. Как видно на чертеже, масса 206 смещается по углу от источника 116 излучения на угол 702 α в направлении вращения и масса 124 располагается напротив массы 206.
В примере, показанном на Фиг.3-6, значение 702 α устанавливается так, чтобы, когда источник 116 излучения находится в самом верхнем (12 час) или в самом нижнем (6 час) положении (0/360 или 180 градусов), фокальное пятно максимально смещено вдоль оси 114 z, а когда источник 116 излучения находится в промежуточных положениях (3 час или 9 час) (90 или 270 градусов), фокальное пятно минимально смещено вдоль оси 114 z. В других вариантах осуществления система формирования изображений выполняется иным образом, так чтобы максимальное смещение происходило в другом угловом положении. В другом варианте осуществления при α=90 градусов и при отсутствии демпфирования смещение трубки и детектора максимизируется для конкретного разбаланса.
К факторам, влияющим на угол 702 α, относятся, в частности, момент инерции поворотной рамы 106, скорость вращения, с которой вращающаяся рама 110 имеет возможность вращаться, жесткость вращающейся рамы 110, демпфируемой демпферами 126, и/или другие факторы. Угол 702 α может быть также установлен другим, большим или меньшим, чтобы изменить угловое положение, при котором фокальное пятно максимально и/или минимально перемещается вдоль оси 114 z. В другом случае угол 702 α может изменяться как функция протокола формирования изображений.
На Фиг.8 показано перемещение вращающейся рамы 110, когда подвижная масса 206 находится приблизительно в первом положении 208. Когда источник 116 излучения располагается в этом положении, вращающаяся рама 110, в сущности, балансируется во всех угловых положениях, поскольку массы 206 и 124 располагаются, по существу, в одной и той же плоскости и радиальные силы 302 уравновешивают друг друга. Также фокальное пятно может вращаться по круговой траектории.
В другом варианте осуществления, по меньшей мере, одно из противовеса 124 и демпфера 126 исключается.
В другом варианте осуществления рычаг привода используется, чтобы толкать и тянуть вращающуюся раму 110 для поворачивания вращающейся рамы 110. Такой рычаг может иметь один конец, прикрепленный к поворотной раме 106, и другой конец, прикрепленный к основанию 104. Рычаг может затем контролируемым образом выдвигаться и втягиваться по мере вращения вращающейся рамы 110, чтобы поворачивать поворотную раму 106 и, следовательно, вращающуюся раму 110 и фокальное пятно.
В другом варианте осуществления подвижная масса 206 альтернативно или дополнительно выполнена с возможностью кругового движения, чтобы ввести разбаланс.
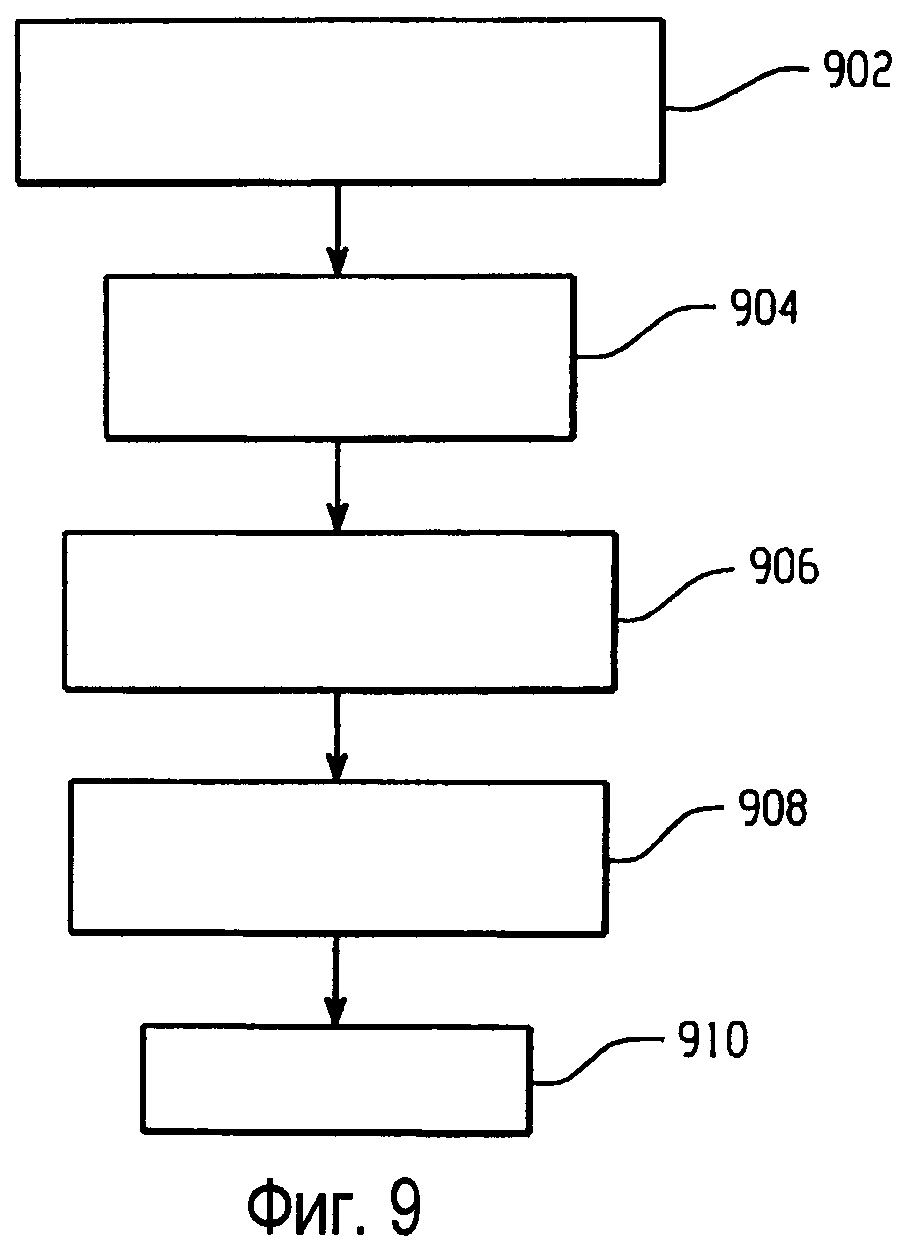
На Фиг.9 представлен первый способ. Следует понимать, что последующие действия могут происходить в разном порядке и в других вариантах осуществления могут использоваться больше или меньше действий и/или другие действия.
На этапе 902 подвижная масса 206 располагается должным образом вдоль, по меньшей мере, оси 114 z относительно вращающейся рамы 110, чтобы контролируемым образом вводить разбаланс массы для вращающейся рамы 110.
На этапе 904 вращающаяся рама 110 увеличивает скорость вращения в соответствии с выбранным протоколом сканирования.
На этапе 906 разбаланс заставляет вращающуюся раму 110 контролируемым образом поворачиваться вокруг оси 108 x, в то время как она вращается вокруг основной оси z.
На этапе 908 фокальное пятно следует траектории, созданной этим перемещением. Как отмечено выше, траектория может быть седловидной или другой траекторией.
На этапе 910 выполняется сканирование.
На Фиг.10 представлен другой способ. Снова, следует понимать, что последующие действия могут происходить в разном порядке и в других вариантах осуществления могут использоваться больше или меньше действий и/или другие действия.
На этапе 1002 подвижная масса 206 должным образом располагается вдоль, по меньшей мере, оси 114 z относительно вращающейся рамы 110, чтобы балансировать вращающуюся раму 110.
На этапе 1004 вращающаяся рама 110 увеличивает скорость в соответствии с выбранным протоколом сканирования.
На этапе 1006 фокальное пятно следует по круговой траектории, поскольку вращающаяся рама 110 является сбалансированной массой.
На этапе 1008 выполняется сканирование.
На Фиг.11 представлен другой способ.
На этапе 1102 вращающаяся рама 110 увеличивает скорость в соответствии с выбранным протоколом сканирования.
На этапе 1104 подвижная масса 206 во время сканирования динамически контролируемым образом сдвигается в одно или более положений вдоль оси 114 z.
На этапе 1106 фокальное пятно следует траектории, созданной этим перемещением.
Изобретение было описано здесь со ссылкой на различные варианты осуществления. Специалисты в данной области техники после прочтения приведенного здесь описания могут предложить модификации и изменения. Подразумевается, что изобретение рассматривается как содержащее в себе все такие модификации и изменения, насколько они попадают в объем прилагаемой формулы изобретения или ее эквивалентов.
Фосфодиэстераза 4d7 как маркер рака предстательной железы
Способ и устройство для приготовления риса
Робот-пылесос, содержащий сенсорную ручку
Пылесос
Контроль кровяного давления пациента
Система детектирования движений
Датчик и блок управления для управления потоком, а также способ контролируемой доставки жидкости
Устройство и способ оптического освещения
Способ создания беспроводной многоскачковой сети
Обнавление сцен в устройствах дистанционного управления домашней системы управления
Система и способ передачи информации между имплантируемыми устройствами
Бесконтактное наблюдение дыхания у пациента и оптический датчик для измерения методом фотоплетизмографии

