Результат интеллектуальной деятельности: АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ
Вид РИД
Изобретение
Изобретение относится к области радиолокации, преимущественно к судовым радиолокационным станциям, и может быть использовано для применения на судах различного тоннажа для обеспечения безопасности плавания в особо сложных навигационных условиях с автоматическим решением навигационных задач. Кроме того, изобретение может быть использовано также для установки на нефтяных платформах для освещения окружающей надводной обстановки без участия оператора или с минимальным участием оператора, с системой допускового и параметрического контроля, обеспечивающей непрерывные измерения технического состояния элементов, прогнозирования их дальнейшего износа и выдачу рекомендаций персоналу по срокам замены модулей на весь срок эксплуатации.
Известны различные конструкции радиолокационных станций. Например, известна радиолокационная станция (РЛС) по патенту РФ №2308737, МПК G01S 13/42 на изобретение. РЛС содержит антенну, формирователь излучаемых сигналов, управляемый усилитель мощности, приемное устройство, устройство первичной обработки и устройство вторичной обработки, управления и отображения, входное устройство защиты и усиления, блок управления режимами работы передающего устройства, контроллер каналов связи и управления и контроллер привода антенны. Антенна кинематически связана через вращающийся соединитель с приводом антенны. Сигнальный выход управляемого усилителя мощности и сигнальный вход входного устройства защиты и усиления связаны с антенной через первый циркулятор. Приемное устройство содержит последовательно соединенные блок усиления на сверхвысокой частоте (СВЧ) и двукратного преобразования на промежуточную частоту (блок СВЧ), предварительный усилитель промежуточной частоты (УПЧ), основной УПЧ и блок формирования сигналов управления приемным устройством. Выход входного устройства защиты и усиления соединен с сигнальным входом приемного устройства. Устройство первичной обработки содержит блок синхронизации и сопряжения, радарный процессор канала индикатора кругового обзора (ИКО) и радарный процессор каналов индикатора точных координат (ИТК) и экстрактора целей (ЭЦ). Кроме того, устройство первичной обработки содержит цифровое приемное устройство и устройство формирования и обработки сложных сигналов. Информационные выходы и управляющие входы радарных процессоров соединены через контроллеры локальной вычислительной сети (ЛВС) Ethernet с устройством вторичной обработки, управления и отображения. Сигнальный вход цифрового приемного устройства соединен с выходом сигналов промежуточной частоты основного УПЧ. Информационный выход устройства формирования и обработки сложных сигналов соединен посредством магистрали ввода радиолокационных данных с входами цифровых интерфейсов радарных процессоров канала ИКО и каналов ИТК и ЭЦ. Выходы устройства формирования и обработки сложных сигналов через блок синхронизации и сопряжения соединены с соответствующими управляющими входами основного УПЧ. Выход бланкирования СВЧ каскадов устройства формирования и обработки сложных сигналов через блок синхронизации и сопряжения соединен с соответствующим управляющим входом блока формирования сигналов управления приемным устройством. Управляющий вход блока СВЧ через блок формирования сигналов управления приемным устройством соединен с соответствующим выходом дискретных сигналов контроллера каналов связи и управления. Выходы и вход контроллера каналов связи и управления соединены с соответствующими управляющими входами и контрольным выходом основного УПЧ. Формирователь излучаемых сигналов содержит четыре задающих генератора, три блока преобразования частоты (БИЧ), усилительно-умножительный каскад, двухканальный умножитель частоты, блок амплитудной модуляции и фазовой манипуляции (блок АМ-ФМ) и блок контроля формирователя. При этом выход первого задающего генератора через усилительно-умножительный каскад соединен с первым входом первого БПЧ. Второй вход БПЧ соединен с выходом второго задающего генератора. Первый выход первого БПЧ соединен с входом первого канала двухканального умножителя частоты. На выходе умножителя частоты формируется сигнал первой гетеродинной частоты, поступающий на первый гетеродинный вход блока СВЧ. На второй гетеродинный вход блока СВЧ подается сигнал второй гетеродинной частоты с первого выхода четвертого задающего генератора. Второй выход первого БПЧ соединен с первым входом второго БПЧ. Второй вход второго БПЧ подключен к первому выходу третьего задающего генератора, а выход соединен с входом второго канала двухканального умножителя частоты. Выход умножителя частоты соединен с сигнальным входом блока АМ-ФМ. Входы третьего БПЧ соединены со вторыми выходами третьего и четвертого задающих генераторов. Выход опорной частоты третьего БПЧ соединен с опорным входом цифрового приемного устройства. Управляющие входы блока АМ-ФМ, на которые поступают сигналы внутриимпульсной фазовой манипуляции, соединены через блок синхронизации и сопряжения с соответствующими выходами устройства формирования и обработки сложных сигналов. Выход импульсов бланкирования устройства формирования и обработки сложных сигналов через блок синхронизации и сопряжения и блок контроля формирователя соединен с управляющим входом третьего задающего генератора. Выходы блока синхронизации и сопряжения соединены с соответствующими коммутационными входами установки несущей частоты первого и второго задающих генераторов и с соответствующими входами блока контроля формирователя. Выход сигнала исправности блока контроля формирователя соединен с соответствующим входом дискретных сигналов контроллера каналов связи и управления. Управляемый усилитель мощности содержит предварительный усилитель. Вход предварительного усилителя соединен с сигнальным выходом блока АМ-ФМ. Выход предварительного усилителя через диодный переключатель соединен с входом первого оконечного усилителя и с входом второго оконечного усилителя. Выходы сигналов исправности блока обработки сигналов через блок управления режимами передающего устройства соединены с соответствующими входами дискретных сигналов контроллера каналов связи и управления. Выход первого оконечного усилителя подключен к первому входу волноводного переключателя усилителя мощности. Второй вход усилителя мощности через циркулятор усилителя мощности соединен с выходом второго оконечного усилителя. Управляющий вход усилителя мощности соединен с соответствующим выходом блока коммутации и контроля. Выход усилителя мощности соединен через направленный ответвитель с детекторной секцией с входом ферритового переключателя. Выход ферритового переключателя образует сигнальный выход управляемого усилителя мощности, а управляющий вход подключен к выходу блока коммутации и контроля. Первый вход синхронизатора соединен с выходом сигнала включения синхронизатора блока коммутации и контроля. Второй вход синхронизатора через блок синхронизации и сопряжения соединен с выходом устройства формирования и обработки сложных сигналов. Первый выход синхронизатора соединен через блок контроля формирователя с управляющим входом амплитудной модуляции блока АМ-ФМ формирователя излучаемых сигналов. К выходам со второго по четвертый синхронизатора подключены входы синхронизации предварительного усилителя, первого оконечного усилителя и импульсного модулятора. Входы блока коммутации и контроля, а также выходы контрольных сигналов готовности и состояния через блок управления режимами работы передающего устройства соединены с соответствующими выходами и входами дискретных сигналов контроллера каналов связи и управления. Интерфейсные входы-выходы контроллера каналов связи и управления соединены посредством последовательных каналов RS-422 с устройством вторичной обработки, управления и отображения, с устройством формирования и обработки сложных сигналов, с радарными процессорами канала ИКО и каналов ИТК и ЭЦ, с блоком синхронизации и сопряжения и с контроллером привода антенны. Информационный вход и выход контроллера привода антенны соединены с соответствующими выходом и входами привода антенны. Интерфейсный вход-выход сигналов управления и контроля соединен посредством последовательного канала RS-422 с устройством вторичной обработки, управления и отображения.
Работает РЛС следующим образом. После включения питания и окончания тестовой проверки вычислительной системы РЛС оператор, используя органы управления выносного терминала, обеспечивает функционирование РЛС либо в режимах работы основного канала приема-передачи РЛС, либо в режиме работы резервного канала приема-передачи РЛС, либо в режиме функционального контроля. Режимы работы основного канала приема-передачи различаются по типу формируемого зондирующего сигнала: импульсного (ИМП), импульсного с внутриимпульсной фазовой манипуляцией (ИФМ) и квазинепрерывного сигнала с амплитудной модуляцией и фазовой манипуляцией (КНС). В каждом из выбранных режимов работы оператор задает шкалу дальности и режим установки несущей частоты. Кроме этого, оператор задает режим работы привода антенны (тип движения, положение визира, сканирования, скорость и т.п.). Работу с электронной панелью управления обеспечивает трекбол. Выходные сигналы трекбола поступают в контроллер последовательных каналов, а из контроллера через блок преобразователей интерфейсов по каналу RS-422 передаются в УУОС, в порт RS-232 видеопроцессора. Далее сигналы управления устройствами основного (или резервного) приемопередающего канала с выхода второго порта RS-232 видеопроцессора через блок преобразователей интерфейсов поступают в магистраль последовательного канала RS-422 и передаются по ней в контроллер каналов связи и управления. Управляющий процессор формирует сигналы управления приводом антенны, которые через блок преобразования интерфейсов поступают в магистраль последовательного канала RS-422 и передаются по ней в контроллер привода антенны. В контроллере привода антенны принятые сигналы через контроллер последовательных каналов и устройство ППВВ поступают в центральный процессор, который формирует коды сигналов управления двигателем привода, поступающие в блок согласования и преобразования сигналов. В блоке эти сигналы преобразуются в широтно-импульсные сигналы и передаются на управляющие входы усилителей мощности, обеспечивающих требуемый режим работы бесколлекторного моментного двигателя. Датчик антенны вырабатывает сигналы углового положения антенны. Датчик двигателя вырабатывает сигнал, используемый для формирования обратной связи следящего привода. Сигналы датчиков с выходов привода антенны поступают на входы блоков цифрового преобразования угла, а из них через устройство ППВВ в центральный процессор, который производит вычисление сигнала ошибки привода и формирование управляющих сигналов по каналам Sin и Cos, замыкая контур обратной связи следящего привода. Кроме того, коды углового положения антенны передаются через устройство ППВВ в режиме реального времени в контроллер последовательных каналов, с выхода которого поступают в блок внешних связей контроллера каналов связи и управления. В контроллере управляющие сигналы и сигналы углового положения антенны через контроллер последовательных каналов и блок согласования сигналов поступают в устройство ППВВ, а из него в центральный процессор микропроцессорного блока управления, в котором программно реализуются алгоритмы приема-передачи управляющей информации и формирования управляющих и контрольных сигналов. Микропроцессорный блок антенны производит расчет компенсационных поправок доплеровского сдвига частоты, возникающего из-за собственного движения носителя РЛС, и передает их через блок внешних связей по магистрали последовательного канала RS-422 в устройство формирования и обработки сложных сигналов. Кроме того, центральный процессор микропроцессорного блока антенны формирует для передачи данные текущего пеленга антенны, которые передаются последовательным 12-разрядным кодом на вход блока преобразования интерфейсов, а с его выхода по магистрали поступают в радарные процессоры и в блок управления и синхронизации. Для обеспечения работы передающего тракта основного приемо-передающего канала РЛС на соответствующих выходах блока ГОР сначала формируются установочные сигналы «Кан. ел. вкл» и «Кан. ант.1р», поступающие через формирователь входных сигналов на вход преобразователя последовательного кода в параллельный. С выхода преобразователя сигнал «Кан. ел. вкл.» через каскад гальванической развязки поступает на управляющий вход ключевого каскада. Напряжение ±27 В от источника питания постоянного тока подается на вход питания блока коммутации и контроля в управляемом усилителе мощности. При этом происходит включение блока ИВЭП, а на шестом выходе блока коммутации и контроля формируется сигнал включения синхронизатора, формирующего сигналы синхронизации предварительного и оконечных каскадов усиления. Сигнал «Кан. ант.1р» с выхода преобразователя поступает в дешифратор входного сигнала, на девятом и одиннадцатом выходах которого формируется комбинация сигналов «Кан. ел. Ант.» и «Кан. имп.экв.», поступающих на входы элемента ИЛИ. Выходной сигнал элемента ИЛИ поступает на управляющие входы блока коммутации, с выхода которого напряжение 27 В по цепям+27 В/-27 В и -27 В поступает на волноводный переключатель. В зависимости от выбранного типа зондирующего сигнала производится включение первого канала (для ИФМ и КНС сигналов) или второго канала (для ИМП сигналов) управляемого усилителя мощности и задается уровень ослабления его выходной мощности. В режимах излучения импульсных зондирующих сигналов микропроцессорный блок управления формирует сигнал «Повыш. Гот.», который передается в блок управления режимами, в котором поступает на первые входы блока элементов И1…И4, на вторые входы которых подаются сигналы «Осл.4»…«Осл.7» с выходов дешифратора. Выходные сигналы «Осл.0»…«Осл.3» дешифратора подаются на входы с первого по четвертый элемента ИЛИ4, на входы которого с пятого по восьмой поступают сигналы с выходов элементов И1…И4. На выходе элемента ИЛИ4 формируется управляющий сигнал, поступающий на управляющий вход ключевого каскада Кл6, который формирует выходной сигнал «Предв. вкл. кан.2», поступающий в блок коммутации и контроля. На пятом выходе блока формируется сигнал «Предв. Вкл.», поступающий на управляющий вход блока высоковольтных источников. По окончании задержки блок коммутации и контроля формирует сигнал «Гот.2 кан.», который поступает на первые входы элементов И5…И8 блока управления режимами. На вторые входы элементов И5…И8 подаются сигналы «Осл.0», …, «Осл.3», а их выходные сигналы поступают на входы ИЛИ5, выходной сигнал которого проходит на управляющий вход ключевого каскада Кл7, формирующего сигнал «Вкл. кан.2», который поступает на вход блока коммутации и контроля. В блоке срабатывает контактор, и в блок высоковольтных источников питания подается команда «Вкл. ВН» на включение высокого напряжения минус 2 кВ. С первого выхода блока снимается управляющий сигнал «Упр. ПК», диодный переключатель переводится во второе положение. С третьего выхода блока коммутации и контроля снимается сигнал «Упр. ВП», и волноводный переключатель устанавливается в положение пропускания выходного сигнала второго оконечного усилителя на выход управляемого усилителя мощности. На выходе блока коммутации и контроля формируется контрольный сигнал «ВН вкл.», происходит включение канала формирования модулирующих импульсов, и оконечный усилитель мощности переходит в рабочий режим. Блоком управления режимами формируются сигналы «Ослаб. 10 дБ» и «Ослаб. 20 дБ», которые передаются на управляющий вход ферритового переключателя, обеспечивая ступенчатую регулировку мощности выходного сигнала управляемого усилителя мощности. Микропроцессорный блок управления формирует управляющие сигналы, которые передаются по магистрали на вход последовательного порта устройства формирования и обработки сложных сигналов, запуская кодирующее устройство. Кодирующее устройство производит формирование структуры зондирующих сигналов в зависимости от задаваемых типа сигнала и шкалы дальности. Во всех режимах одновременно с сигналами модуляции и манипуляции кодирующее устройство формирует сигнал бланкирования формирователя излучаемых сигналов, сигналы «Бланк» и «БИ» бланкирования устройств приемного тракта, импульс «ИЗВ» запуска ВАРУ и строб ШАРУ. Сформированные кодирующим устройством сигналы модуляции, манипуляции и коммутации записываются в упакованном формате во внешнюю память данных. Алгоритмы формирования сигналов определяются программным обеспечением. Устройство формирования и обработки переходит в цикл зондирования. В цикле зондирования из внешней памяти данных читаются слова сформированных сигналов передаются в блок синхронизации и сопряжения, на выходах которого формируются сигналы «АМ2», «Ф1», «Ф2», «Ч», «Бланк», «БИ», «ИЗВ» «Строб ШАРУ» для передачи в устройства приемопередающего тракта. Микропроцессорный блок управления формирует управляющие сигналы, поступающие в блок синхронизации и сопряжения, который формирует коды несущей частоты НЧ1…НЧ7 для коммутации формирователя излучаемых сигналов. Коммутация диодных коммутаторов ДМ1…ДМ4 первого задающего генератора производится выходными сигналами модуляторов М1…М2 при поступлении на них кодов H41…HЧ4 несущей частоты, а коммутация диодных коммутаторов ДМ5, ДМ6 и ДМ7 второго задающего генератора модуляторами М3 и М4 при поступлении на них кодов НЧ5…НЧ7. Выходные сигналы умножителей частоты на 4 через диодные коммутаторы ДКм1 и ДКм2 поступают на входы усилительно-умножительных цепочек, выходы которых являются выходными сигналами первого и второго задающих генераторов. Сигнал с выхода первого задающего генератора поступает в усилительно-умножительный каскад, где его частота умножается на 8. С выхода балансного усилителя БУ1 усилительно-умножительный каскада сигнал поступает на первый вход транзисторного смесителя CM1 первого блока преобразования частоты, на второй вход которого поступает выходной сигнал второго задающего генератора. В смесителе CM1 формируется выходной сигнал с частотой, равной разности входных частот, который поступает на двухкаскадный балансный усилитель. Второй каскад балансный усилителя имеет два идентичных выхода. Сигнал с первого выхода используется для завершения формирования сигнала первого гетеродина, а сигнал со второго выхода - для выработки излучаемого сигнала. Мощность сигналов на выходах первого блока преобразования частоты не менее 30 мВт. При использовании первого канала усилителя мощности выходной сигнал предварительного усилителя подается на первый оконечный усилитель (при наличии сигнала «Упр. ПК»), в котором происходит дальнейшее усиление СВЧ сигнала до 10 дБ по мощности. Сигнал с выхода первого оконечного усилителя проходит на вход ферритового переключателя, ослабляющего при необходимости уровень мощности выходного сигнала в соответствии с заданным уровнем ослабления. С выхода ферритового переключателя зондирующий сигнал через первый циркулятор, волноводный переключатель и вращающийся соединитель поступает в антенну и излучается в пространство. При использовании второго канала усилителя мощности, выход диодного переключателя соединяется с входом второго оконечного усилителя, усиливающего подводимый сигнал на 30 дБ. При этом в блоке обработки сигналов формируются сигналы управления pin-аттенюатором диодного переключателя. Сформированные управляющие сигналы обеспечивают регулировку подводимой СВЧ мощности клистрона (выставление оптимального значения для данной частоты). В паузе между излучаемыми сигналами происходит запирание СВЧ тракта в усилителе мощности и в формирователе излучаемых сигналов. Принятые антенной отраженные сигналы поступают во входное устройство защиты и усиления, которое на время излучения зондирующих импульсов заперто бланкирующими импульсами «Бланк 1» и «Бланк 2». Импульсы «Бланк 1» и «Бланк 2» формируются электронными ключами блоков формирования бланкирующих импульсов приемного устройства при поступлении сигнала «Бланк» с выхода блока синхронизации и сопряжения. Импульс «Бланк 1» подается на управляющий анод циклотронного защитного устройства (ЦЗУ), а импульс «Бланк» - на управляющий вход источника питания МШУ, отключая его. Выходной сигнал ЦЗУ усиливается МШУ и далее передается на вход приемного устройства. Включение аттенюатора производится сигналом «Упр. атт.», который формируется на выходе блока преобразования последовательного кода в параллельный при поступлении сигнала «Атт» из микропроцессорного блока управления. Выходной сигнал «Упр. атт.» логического уровня из блока преобразования последовательного кода в параллельный объединяется по функции ИЛИ с входным сигналом «Бланк» в элементе ИЛИ и поступает в блок преобразования сигналов, на выходе которого формируется сигнал «Упр. Атт». В приемном устройстве сигнал входного устройства зашиты и усиления поступает на вход блока аттенюаторов, с помощью которых устанавливается требуемый коэффициент усиления приемного устройства. Принятые сигналы усиливаются в усилителе-ограничителе и преобразуются в сигналы первой промежуточной частоты в первом балансном смесителе. После усиления и полосовой фильтрации сигналы первой промежуточной частоты поступают на второй балансный смеситель. Выходные сигналы блока СВЧ усиливаются избирательным усилителем предварительного УПЧ и поступают в основной УПЧ. Блок ШАРУ обеспечивает стабилизацию шума на выходе сигналов «ПЧ2» трехкаскадного усилителя-ограничителя и выходе сигналов «ВИа» видеоусилителя. Сигнал стробирования ШАРУ формируется кодирующим устройством и передается на первый управляющий вход блока ШАРУ, а значение величины порога ШАРУ формируется микропроцессорным блоком управления и передается в цифроаналоговый преобразователь, с выхода которого управляющее напряжение «П-ШАРУ» поступает в блок ШАРУ. В основном УПЧ предусмотрена также возможность отключения блока ШАРУ по сигналу «Откл. ШАРУ», поступающему из микропроцессорного блока управления на управляющий вход электронного ключа. При выключенном блоке ШАРУ необходимый коэффициент усиления в трехкаскадном регулируемом усилителе устанавливается уровнем напряжения «РРУ», которое формируется аналогично порогу ШАРУ и передается на сигнальный вход электронного ключа, а с его выхода через первый вход элемента ИЛИ - на вход регулировки усиления трехкаскадного регулируемого усилителя. Блок ВАРУ включатся сигналом «ИЗВ», формируемым кодирующим устройством и поступающим на вход включения блока ВАРУ. В режимах с ИФМ и КНС сигналами блок ВАРУ отключается управляющим сигналом «Откл. ВАРУ», который формируется микропроцессорным блоком и передается на управляющий вход электронного ключа. Длительность сигнала ВАРУ регулируется переменным резистором блока ВАРУ, а глубина ВАРУ - напряжением «ВАРУ-Г», формируемым микропроцессорным блоком управления и передаваемым на вход блока ВАРУ. Сигнал промежуточной частоты «ПЧ2» поступает на вход цифрового приемного устройство (ЦПУ). ЦПУ осуществляет аналого-цифровое преобразование сигнала, формирование цифровых квадратурных компонент, цифровой перенос сигнала с промежуточной частоты на нулевую частоту (демодуляцию), компенсацию доплеровского сдвига частоты за счет собственной скорости носителя и цифровую фильтрацию сигнала с прореживанием по частоте в фильтрах с гребенчатой характеристикой. Ширина полосы прозрачности цифрового фильтра ЦПУ согласована с минимальным квантом фазовой манипуляции. Сформированные на выходе ЦПУ цифровые квадратурные компоненты отраженного фазоманипулированного сигнала поступают в устройство корреляционно-спектральной обработки сигналов, представляющее собой восемь кластеров обработки, каждый из которых содержит блок сжатия, сигнальный процессор и ОЗУ. Цифровые отсчеты сформированного ЦПУ видеосигнала подаются на квадратурное многоканальное устройство вычисления свертки, реализованное на основе блоков сжатия. Вычисление свертки производится по сегментам сигнала, длительность которого определяется анализируемым доплеровским диапазоном частот. Сигналы с многоканального коррелятора поступают в ОЗУ, в которых происходит дальнейшее накопление сигнала. Результаты свертки сигнала прошедшего цикла передаются по последовательному интерфейсу SPORT в цифровые сигнальные процессоры для спектральной обработки. Путем последовательного опроса каналов дальности производится восстановление развертки по дальности и передача ее цифровым 14-разрядным кодом в радарные процессоры. Радарные процессоры предназначены для обработки видеосигналов РЛС и осуществляют формирование данных для канала индикатора кругового обзора и для каналов индикатора точных координат и экстрактора целей. ПЛИС радарных интерфейсов выполняет прием радиолокационных данных из устройства формирования сложных сигналов или из АЦП, сигналов текущего пеленга антенны из микропроцессорного блока антенны, выполняет предварительную обработку сигналов и выдает данные в ЦСП. ЦСП выполняет пороговую обработку сигналов для каналов ИКО (ИТК) и частичную обработку сигналов для канала ЭЦ. ЦСП обеспечивает связь с устройством вторичной обработки, управления и отображения информации через интерфейс Ethernet, осуществляет прием и разбор команд от устройства, формирует команды для ПЛИС, принимает от них данные, преобразует выходные данные в соответствии с заданной таблицей преобразования в 4-разрядные величины, упаковывает данные по 8 отсчетов в 32-разрядное кодовое слово и отправляет в устройство вторичной обработки для отображения на экране информационного дисплея. Устройство вторичной обработки, управления и отображения обеспечивает формирование зон запрета автосопровождения, формирование строба сопровождения в автоматическом и полуавтоматическом режимах, определение текущего расстояния до цели и текущего пеленга на цель, измерение и отображение координат целей, измерение параметров ориентиров в полярной системе координат, реализацию алгоритма классификации целей.
Недостатком указанной радиолокационной станции является сложность конструкции за счет необходимости иметь два радарных процессора. Кроме того, конструкция предопределяет сложный алгоритм работы, требующий повышенных ресурсов вычислительной системы.
Известна также радиолокационная станция судовой навигации по патенту РФ №2444026, МПК G01S 7/00 на изобретение. Радиолокационная станция системы судовой навигации содержит антенный пост и пульт управления. Антенный пост включает в себя волноводно-щелевую антенную систему, соединенную с вращающимся переходом, а также устройство формирования и обработки сигналов (УФОС). Вращающийся переход соединен через ферритовый циркулятор с приемопередатчиком, выполненным в виде формирователя зондирующего сигнала и приемника' отраженного сигнала. Входы и выходы УФОС соединены с приемопередатчиком, при этом УФОС расположен от пульта управления не более чем на 1 м. УФОС выполнен на программируемой логической интегральной схеме (ПЛИС) и содержит блок формирования зондирующего сигнала, блок оцифровки принимаемого сигнала, блок управления приемопередатчиком, блок цифровой обработки сигнала. ПЛИС соединена с процессором цифровой обработки сигнала с целочисленной арифметикой.
В радиолокационной станции судовой навигации для определения дальности объекта по отраженному сигналу в качестве зондирующего сигнала используют непериодический сложный сигнал, длина временного отрезка которого является сегментом сигнала, при этом сегменты сигнала в течение времени накопления не повторяются, в каждый сегмент сигнала введен строб импульсного сигнала, расположение которого посередине сегмента сигнала, и временной отрезок строба импульсного сигнала равен максимальной задержке отраженного сигнала от дальнего объекта, на которую рассчитана шкала радиолокационной станции. При этом непериодический сложный сигнал представлен в виде сосредоточенных во времени пачек, интервал следования которых равен максимальной задержке до цели, и располагаются сосредоточенные во времени пачки таким образом, чтобы отраженные сигналы от ближних и дальних целей не пересекались во времени. Отраженный сигнал принимается, производится его оцифровка, выделяется импульсный сигнал и режектируются импульсные помехи, на сегменте сигнала осуществляется свертка сигнала по пачкам путем корреляции принятого сигнала и непериодического сложного сигнала, осуществляется накопление в рециркуляторе пачек сегмента, формируется суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывается скорость корабля с учетом среднего доплеровского смещения, определяется дальность до объекта путем компенсации собственной скорости корабля, ПЛИС формирует сигнал на видеочастоте и передает его на формирователь зондирующего сигнала в виде сложных фазоманипулированных сигналов и стробимпульсов. ПЛИС передает сигнал на приемник отраженных сигналов для приема отраженных сигналов и режекции импульсных помех. ПЛИС также формирует сигналы коммутации приемопередатчика для осуществления работы РЛС в двух режимах и подает их на управляющие входы приемопередатчика в виде стробимпульсов. Кроме того, ПЛИС формирует команды для управления приводом вращения антенного поста по принимаемым сигналам контроля и подает команды управления во вращающуюся систему по цифровым линиям. ПЛИС формирует команды управления мощностью и чувствительностью приемника отраженных сигналов. Процессор цифровой обработки сигнала принимает отраженный сигнал в виде кодов амплитуды и фазы, оцифровывает его, выделяет комплексную огибающую сигнала, выделяет импульсный сигнал и бланкирует импульсные помехи. Также процессор цифровой обработки сигнала на сегменте сигнала осуществляет свертку сигнала на одном периоде амплитудной модуляции, осуществляет накопление пачек сегмента, осуществляет доплеровская фильтрация, формирует суммарный отклик импульсного строба и сложного сигнала, по которому рассчитывает скорость корабля с учетом среднего доплеровского смещения, определяет дальность до объекта путем компенсации собственной скорости корабля. Процессор цифровой обработки сигнала передает обработанные цифровые данные по сети Ethernet в РП РЛС со скоростью не менее 100 МБ/с.
Недостатком радиолокационной станции судовой навигации является его сложный алгоритм обработки за счет применения фазоманипулированного сигнала, требующий повышенных ресурсов вычислительной системы.
Наиболее близким по совокупности существующих признаков аналогом к заявленному изобретению (прототипом), является радиолокационная система с функциональным преобразованием характеристик отраженных сигналов по патенту РФ №117645, МПК G01S 13/08 на полезную модель. Радиолокационная система содержит антенный блок, блок связи и синхронизации, передающий модуль, приемный модуль, индикатор. Антенный блок соединен через СВЧ тракт с передающим модулем и приемным модулем. Индикатор содержит средство обработки отраженных сигналов, монитор с возможностью формирования радиолокационного изображения и дополнительный монитор. Средство обработки отраженных сигналов выполнено с возможностью функционального преобразования статистических характеристик отраженных сигналов путем вычисления за определенное количество циклов обзора исследуемого пространства для каждого элемента пространственного разрешения статистических характеристик отраженных сигналов. Средство обработки отраженных сигналов содержит компьютер с платой радар-процессора.
Радиолокационная система работает следующим образом. Сформированный в передающем модуле СВЧ-радиоимпульс заданной длительности через направленный ответвитель и циркулятор СВЧ тракта поступает в антенный блок и излучается антенной в пространство. В передающем модуле формируется также синхроимпульс, передний фронт которого совпадает с передним фронтом излучаемого сигнала, который подается на вход блока связи и синхронизации. Незначительная часть мощности импульса передатчика через направленный ответвитель и аттенюатор, входящие в СВЧ тракт, подается в приемный модуль для АПЧ гетеродина. Принятый антенной отраженный сигнал через циркулятор СВЧ тракта поступает на вход приемного модуля, на выходе которого получается видеосигнал, соответствующий уровню отражений в заданном направлении зондирования. Блок связи и синхронизации обеспечивает передачу команд управления и контроля к передающему и приемному модулям, а также передачу видеосигнала с выхода приемного модуля через блок сопряжения и коммутации на индикатор, а именно на вход компьютера с платой радар-процессора. Радар-процессор обеспечивает дискретизацию, оцифровку уровня дискретных отсчетов видеосигналов и их передачу через шину компьютера в компьютер для их дальнейшей обработки. Управление режимами работы радар-процессора осуществляет оператор путем передачи команд через шину компьютера. Компьютер осуществляет обработку принятых сигналов, отображение первичной и вторичной информации на мониторе и дополнительном мониторе или на соответствующих частях монитора, а также хранение и трансляцию полученной информации по локальным вычислительным сетям. При этом первичная информация на мониторе представлена в виде текущего радиолокационного изображения, яркость элементов которого соответствует уровню сигналов, отраженных от объектов локации в соответствующих элементах разрешения. При обработке отраженных сигналов для каждого элемента разрешения вычисляются характеристики отраженных сигналов: среднее значение и дисперсия, - за устанавливаемое оператором определенное количество циклов обзора исследуемого пространства (оборотов антенны). Кроме того, выполняется одновременное функциональное преобразование характеристик отраженных сигналов от объектов локации в соответствующих элементах разрешения, заключающееся в перемножении среднего уровня и дисперсии отраженных сигналов. Яркость элементов функционально преобразованного радиолокационного изображения на дополнительном мониторе или на соответствующей части монитора определяется результатом функционального преобразования характеристик сигналов для соответствующих элементов разрешения.
Однако и эта радиолокационная система имеет большую конструктивную сложность за счет необходимости двух мониторов или двух различных радиолокационных изображений на одном мониторе. Кроме того, конструкция радиолокационной станции-прототипа предопределяет сложный алгоритм обработки отраженных сигналов, требующий повышенных ресурсов вычислительной системы. Вместе с тем, наличие двух изображений требует отвлечения внимания оператора, что снижает безопасность навигации. Помимо этого, в устройстве-прототипе отсутствует возможность интеграции с внешними средствами видеонаблюдения.
Задача, которую поставил перед собой разработчик нового устройства, состояла в создании простого устройства с повышенной помехоустойчивостью, работающего в Х-диапазоне и S-диапазоне частот, которое позволило бы устанавливать его на суда различного тоннажа для обеспечения безопасности плавания в особо сложных навигационных условиях с автоматическим решением навигационных задач. Кроме того, задачей являлось создание такого устройства, которое позволило бы интегрировать и отображать совместно с радиолокационным изображением электронные карты, а также информацию от приемника автоматизированной информационной системы. А также задачей, стоящей перед разработчиком нового устройства, являлось создание такого устройства, которое позволило бы интегрировать и отображать информацию от палубных средств видеонаблюдения, ночных и тепловизионных средств наблюдения, средств обеспечения безопасности объекта, а также от навигационных датчиков и метеодатчиков на свободной зоне экрана без перекрытия радиолокационного изображения. В частности, устройство предназначалось для установки на нефтяных платформах для освещения окружающей надводной обстановки в автономном режиме с передачей радиолокационных данных и данных самоконтроля на удаленный пункт наблюдения. Устройство должно было бы иметь возможность автоматического переключения с основной сети электропитания на резервную сеть электропитания или на аварийный источник электропитания, иметь систему допускового и параметрического контроля, обеспечивающую непрерывное измерение технического состояния элементов, прогнозирование их дальнейшего износа и выдачу рекомендаций персоналу по срокам замены модулей на весь срок эксплуатации.
Изобретение можно использовать в различных отраслях народного хозяйства. Технический результат заключается в возможности использования радиолокационной станции кругового обзора, работающей в Х-диапазоне и S-диапазоне частот на судах различного тоннажа для обеспечения: безопасности плавания в особо сложных навигационных условиях с автоматическим решением навигационных задач, а также в возможности установки на нефтяных платформах для освещения окружающей надводной обстановки в автономном режиме с передачей радиолокационных данных и данных самоконтроля на удаленный пункт наблюдения.
Сущность изобретения состоит в том, что в автоматической навигационной радиолокационной станции кругового обзора, состоящей из антенного блока, блока связи и синхронизации, передающего модуля, приемного модуля, средства обработки отраженных сигналов, пульта управления и видеомонитора, введены автомат включения резервного электропитания, система допускового и параметрического контроля и коммутатор, при этом приемный модуль, передающий модуль и блок связи и синхронизации объединены в единый приемопередатчик, средство обработки отраженных сигналов представляет собой устройство обработки, целевыделения и выработки параметров движения, состоящее из модуля аналогового ввода и радар-процессора, радар-процессор и приемопередатчик соединены через коммутатор посредством канала Ethernet с компьютером, выполненным в виде вычислительного устройства, хранящего и обрабатывающего информацию электронной карты и информацию, полученную от приемника автоматизированной информационной системы, интегрирующего ее с радиолокационным изображением и выдающего на видеомонитор, вычислительное устройство выполнено с возможностью получения от внешних устройств видеонаблюдения по каналу пакетной передачи данных (Ethernet) через коммутатор видеоизображения и отображения его на видеомониторе на свободной зоне экрана без перекрытия радиолокационного изображения, причем приемопередатчик, радар-процессор, вычислительное устройство и автомат включения резервного электропитания связаны между собой последовательной шиной по стандарту Controller Area Network (CAN), обеспечивающей передачу информации допускового и параметрического контроля.
Вместе с тем, сущность изобретения состоит и в том, что в автоматической навигационной радиолокационной станции кругового обзора модуль аналогового ввода и радар-процессор выполнены на программируемых логических интегральных микросхемах, цифровых сигнальных процессорах обработки сигналов, микросхемах аналого-цифровых преобразователей, микросхемах прямого цифрового синтеза сигналов.
Кроме того, сущность изобретения состоит и в том, что в автоматической навигационной радиолокационной станции кругового обзора коммутатор выполнен с возможностью передачи информации от приемопередатчика, радар-процессора и от вычислительного устройства по каналу Ethernet на внешний модуль оператора.
Вместе с тем, сущность изобретения состоит и в том, что в автоматической навигационной радиолокационной станции кругового обзора автомат включения резервного электропитания выполнен с возможностью обеспечения непрерывной работы от сетей основного или резервного электропитания переменного тока напряжением 220 В, частотой 50 Гц.
Кроме того, сущность изобретения состоит и в том, что в автоматической навигационной радиолокационной станции кругового обзора автомат включения резервного электропитания выполнен с возможностью обеспечения непрерывной работы от аварийного источника питания постоянного тока напряжением 24 В.
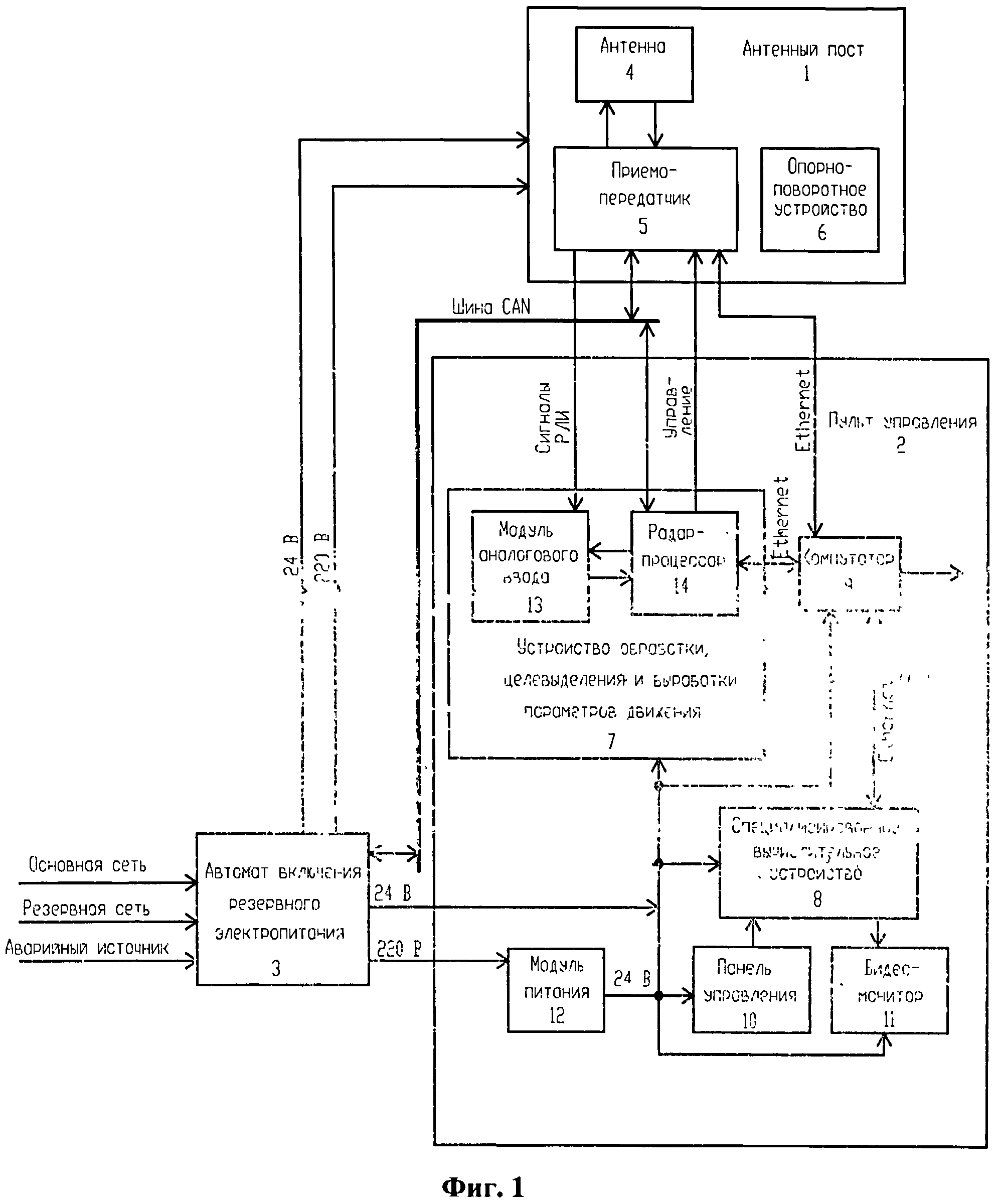
Доказательства возможности осуществления автоматической навигационной радиолокационной станции кругового обзора с реализацией указанного назначения приводятся ниже на конкретном примере радиолокационной станции кругового обзора с антенным постом S-диапазона. Этот характерный пример выполнения конкретной радиолокационной станции кругового обзора согласно предлагаемого изобретения ни в коей мере не ограничивает его объем правовой защиты. В этом примере дана лишь конкретная иллюстрация предлагаемой автоматической навигационной радиолокационной станции кругового обзора. Изобретение поясняется чертежами, где:на фиг.1 изображена структура автоматической навигационной радиолокационной станции;
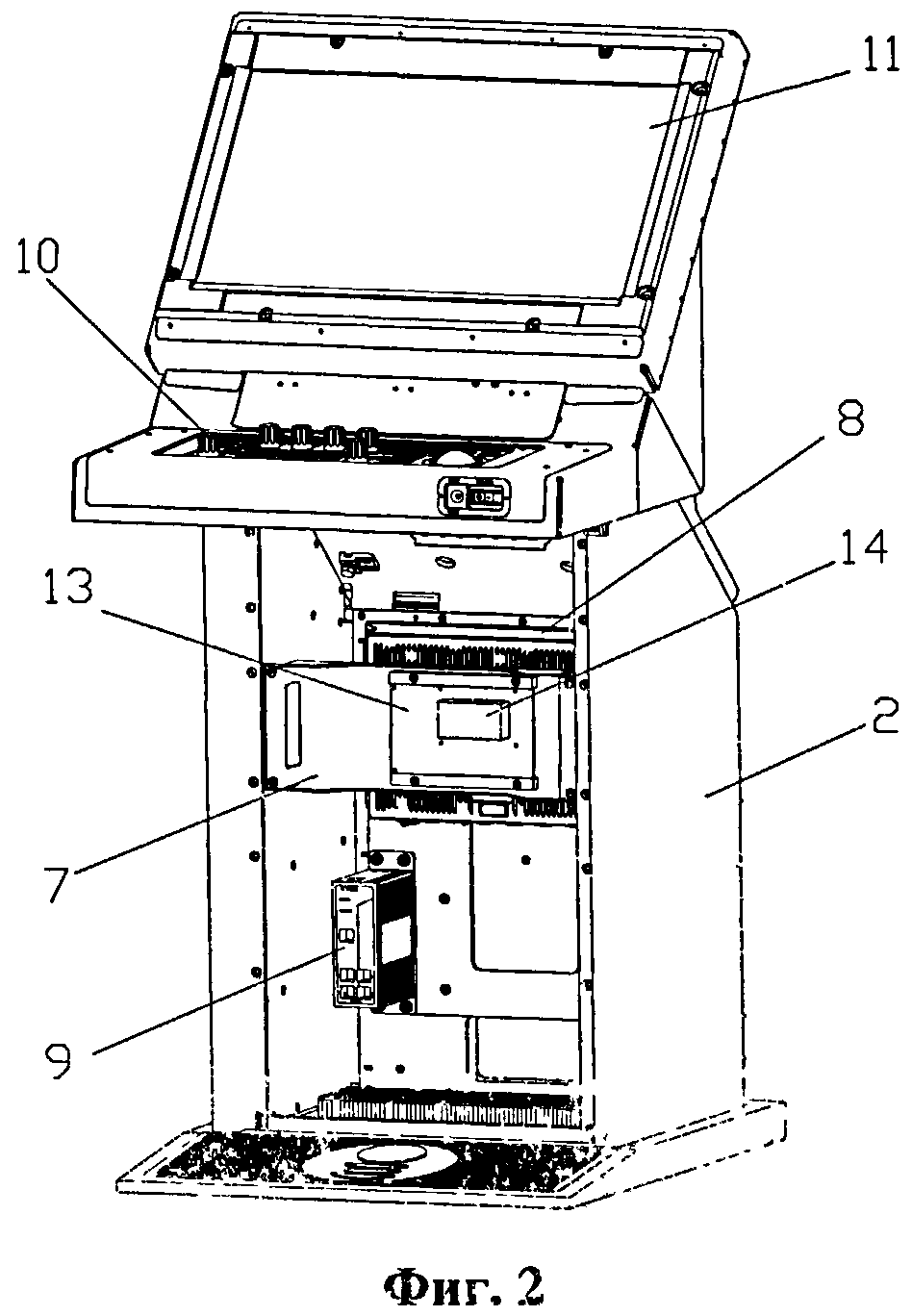
на фиг.2 изображен пульт управления 2 в аксонометрический проекции, вид спереди;
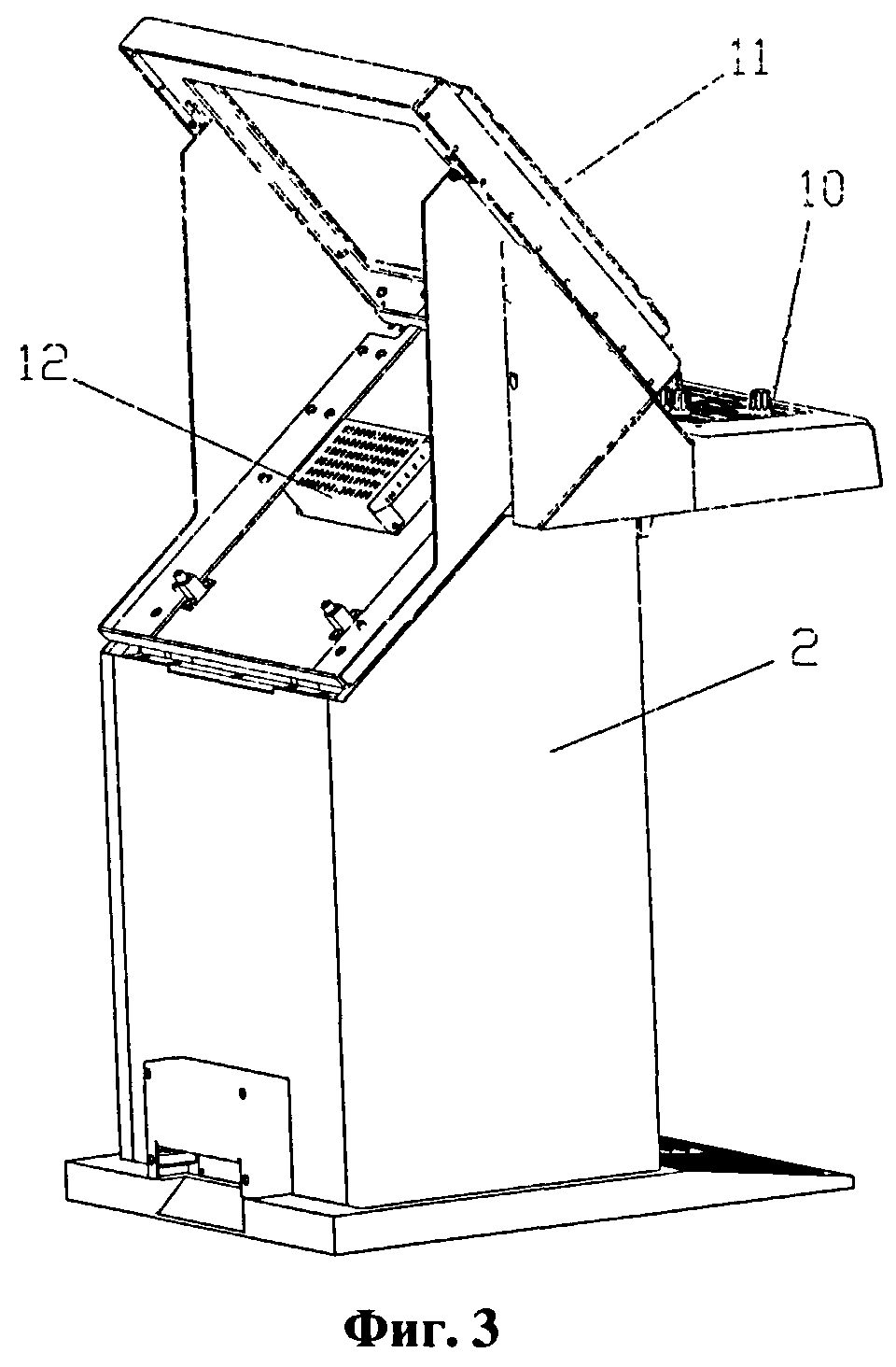
на фиг.3 изображен пульт управления 2 в аксонометрический проекции, вид сзади;
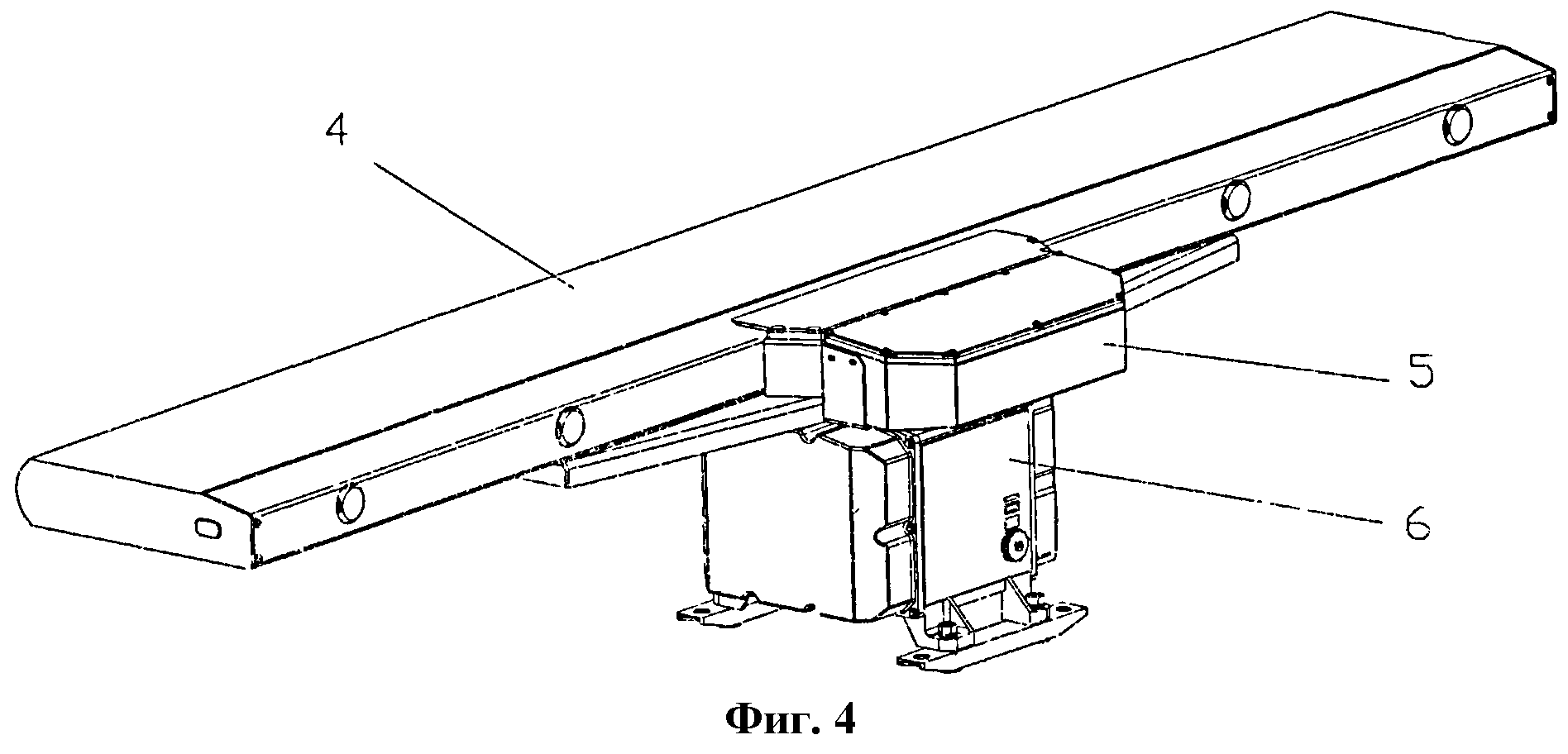
на фиг.4 изображен антенный пост 1 в аксонометрический проекции, вид сзади;
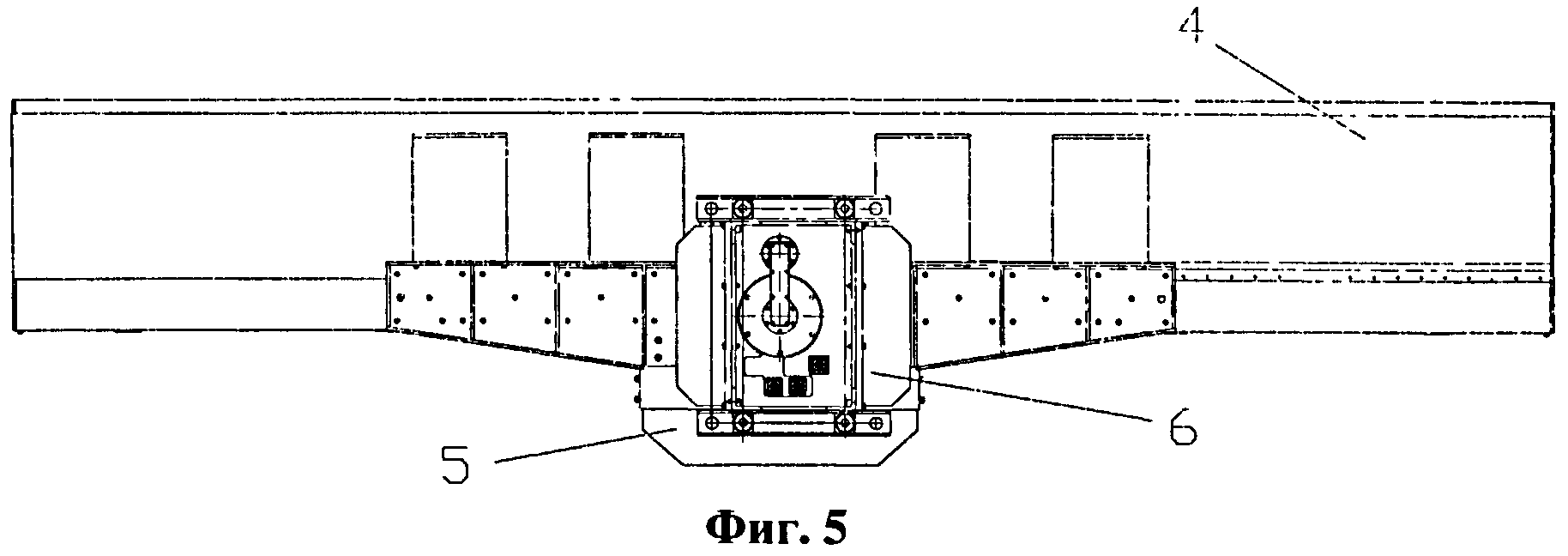
на фиг.5 антенный пост 1 в аксонометрический проекции, вид снизу;
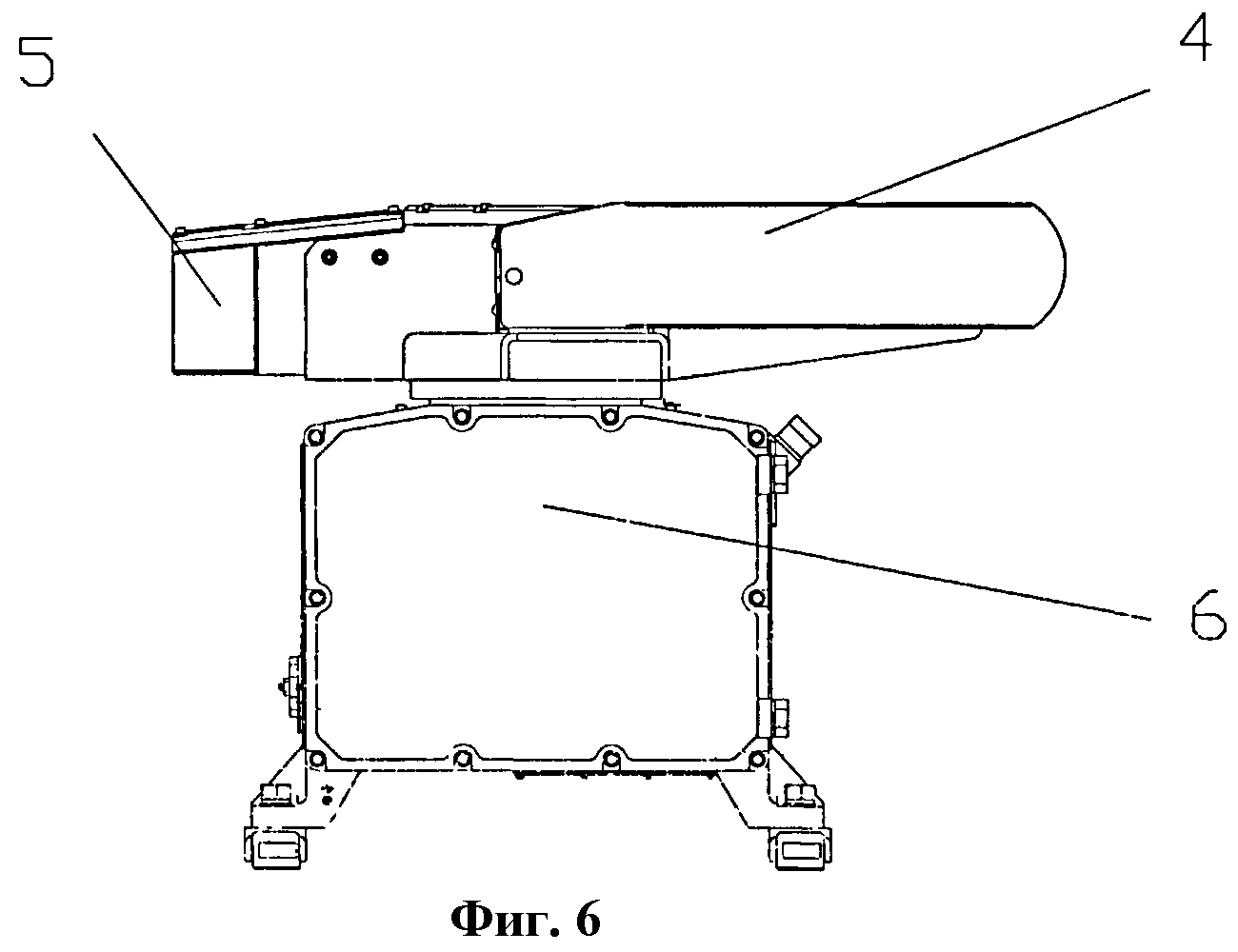
на фиг.6 изображен антенный пост 1, вид сбоку;
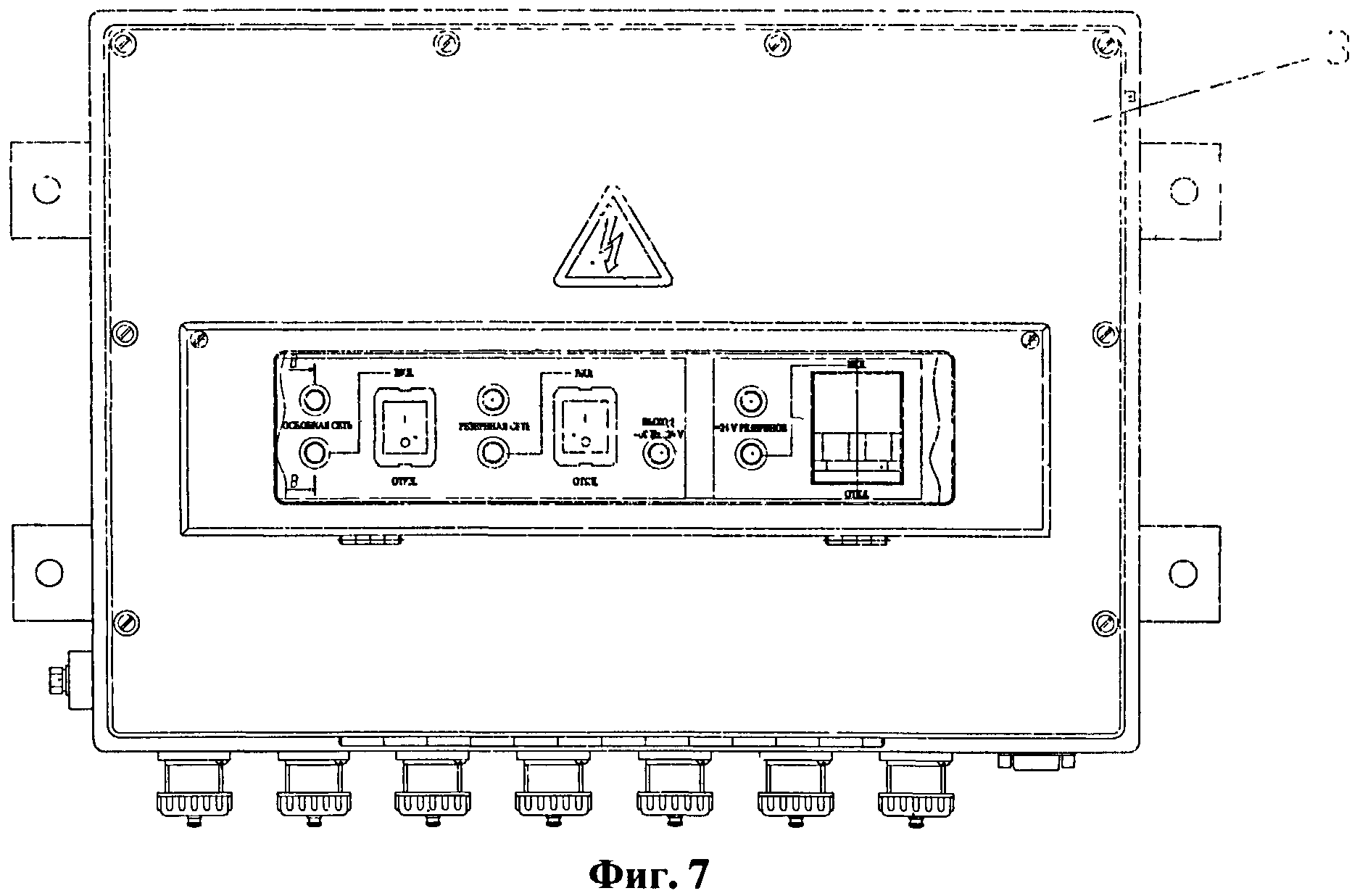
на фиг.7 изображен автомат включения резервного электропитания 3, вид спереди;
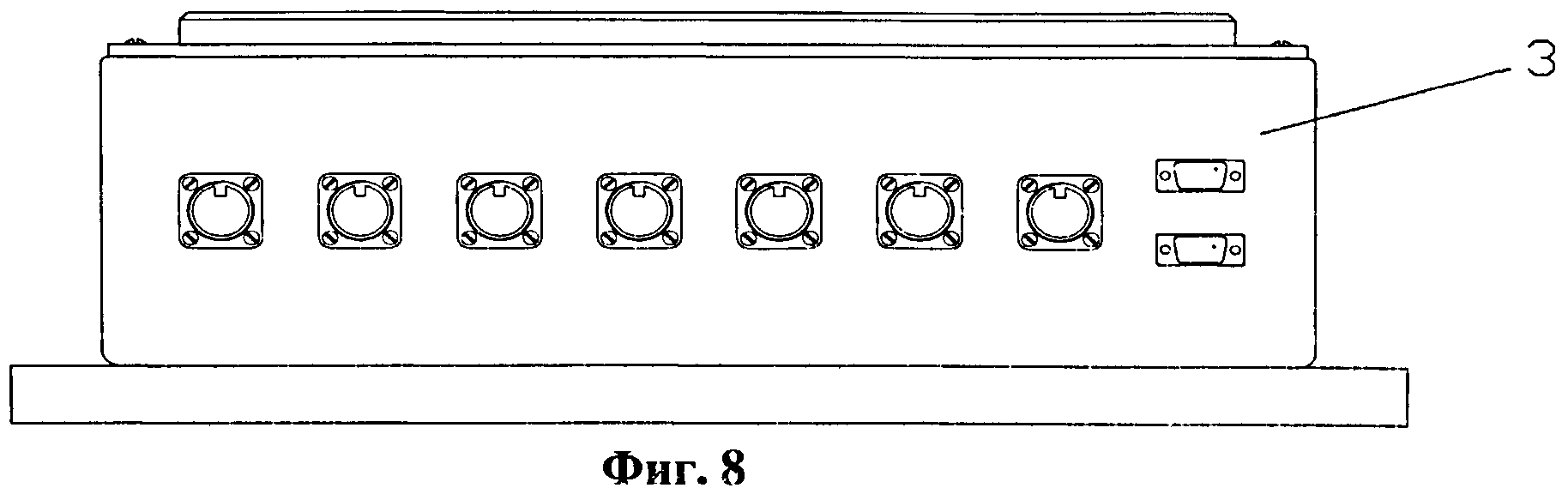
на фиг.8 изображен автомат включения резервного электропитания 3, вид снизу;
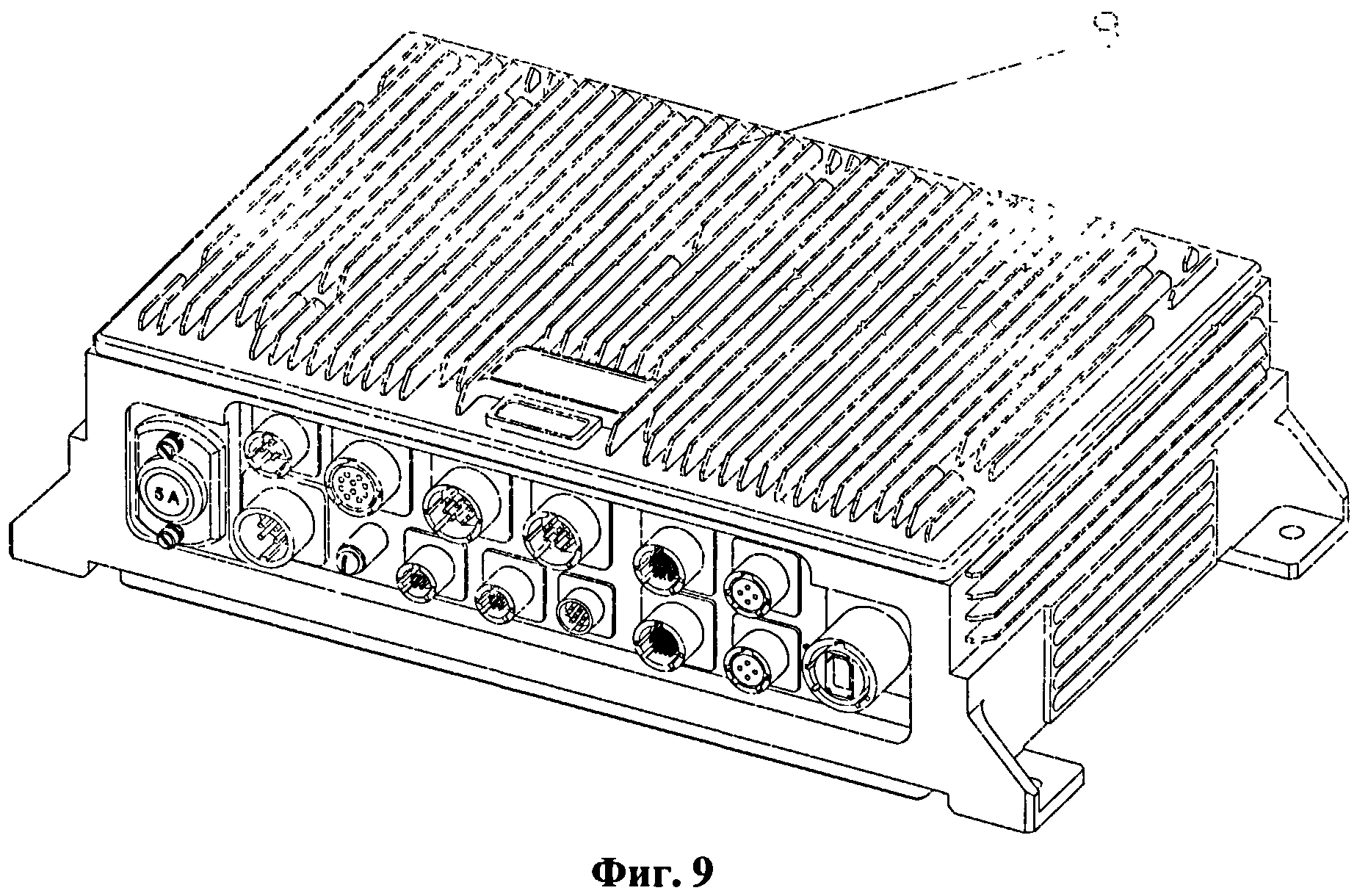
на фиг.9 изображено вычислительное устройство 8 в аксонометрический проекции;
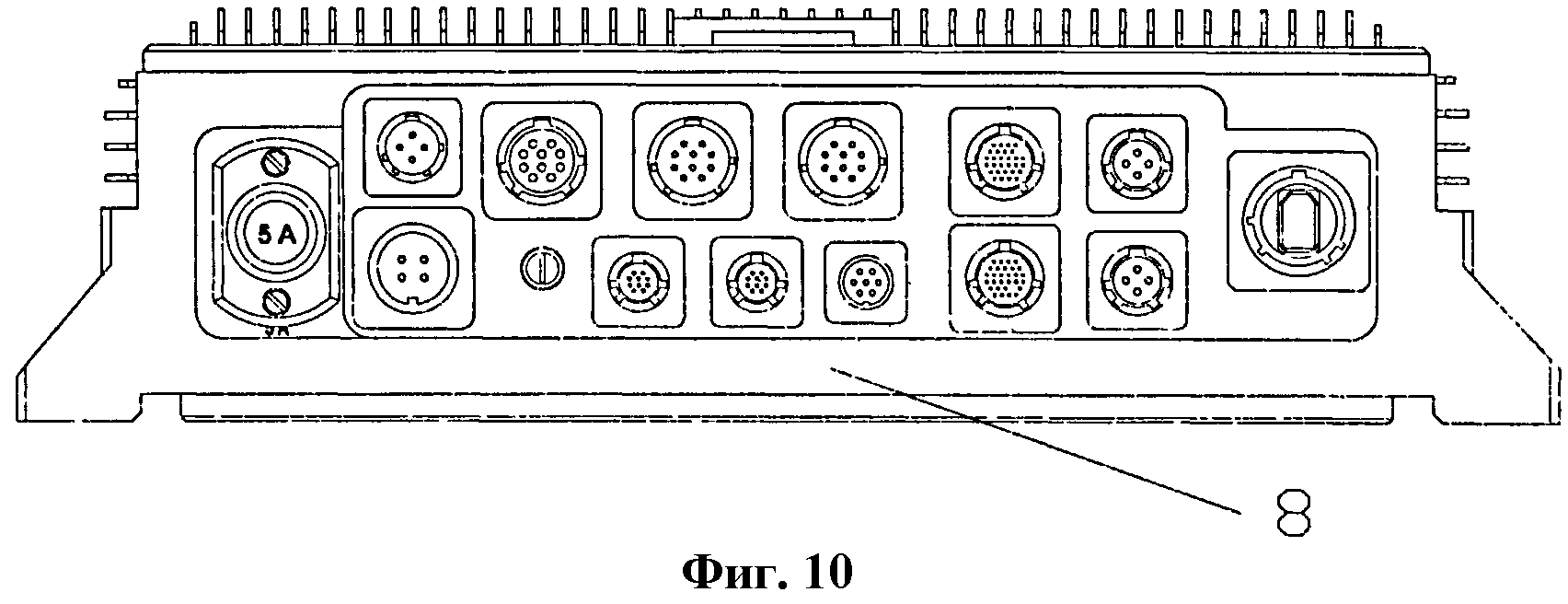
на фиг.10 изображено вычислительное устройство 8, вид снизу;
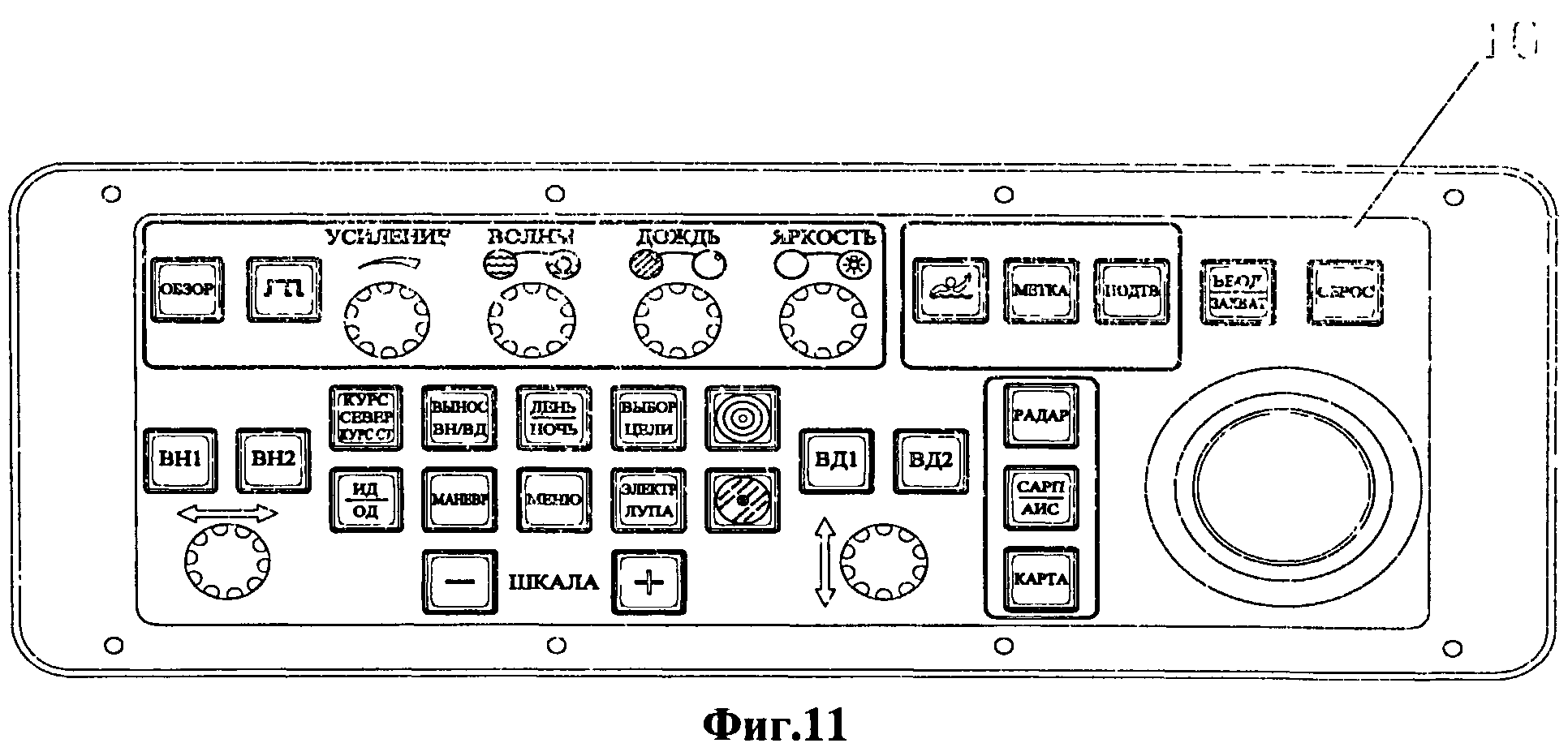
на фиг.11 изображена панель управления 10, вид спереди.
Автоматическая навигационная радиолокационная станция кругового обзора содержит антенный пост 1, пульт управления 2 и автомат включения резервного электропитания 3. Антенный блок 1 состоит из антенны 4, соединенной с приемопередатчиком 5 через циркулятор. Антенна 4 и приемопередатчик 5 кинематически соединены с опорно-поворотным устройством 6. Пульт управления 2 содержит устройство обработки, целевыделения и выработки параметров движения 7, вычислительное устройство 8, коммутатор 9, панель управления 10, видеомонитор 11 и модуль питания 12. Устройство обработки, целевыделения и выработки параметров движения 7 состоит из модуля аналогового ввода 13, который соединен с радар-процессором 14. Выход сигналов радиолокационной информации приемопередатчика 5 соединен с входом модуля аналогового ввода 13. Вход сигналов управления приемопередатчика 5 соединен с выходом управления радар-процессора 14. Выход модуля аналогового ввода 13 соединен с входом радар-процессора 14. Вход управления модуля аналогового ввода 13 соединен с выходом радар-процессора 14. Вход-выход канала Ethernet радар-процессора 14 соединен с входом-выходом 1-го канала коммутатора 9. Вход-выход 2-го канала коммутатора 9 соединен с входом-выходом вычислительного устройства 8. Выход видеоизображения вычислительного устройства 8 соединен с видеовходом видеомонитора 11. Выход сигналов управления панели управления 10 соединен с входом вычислительного устройства 8. Входы-выходы шины CAN приемопередатчика 5, радар-процессора 14, автомата включения резервного электропитания 3 и вычислительного устройства 8 объединены в единую шину. Выход переменного напряжения 220 В автомата включения резервного электропитания 3 соединен с входом переменного электропитания антенного поста 1 и входом переменного электропитания модуля питания 12. Выход постоянного напряжения 24 В автомата включения резервного электропитания 3 соединен с входом постоянного электропитания антенного поста 1 и выходом постоянного напряжения 24 В модуля питания 12. Выход постоянного напряжения 24 В модуля питания 12 соединен с входами постоянного электропитания устройства обработки, целевыделения и выработки параметров движения 7. вычислительного устройства 8, коммутатора 9, панели управления 10, видеомонитора 11.
Передающее устройство приемопередатчика 5 построено на основе магнетронного автогенератора и импульсного модулятора.
Антенна 4 изготовлена с использованием блока диэлектрических линзовых элементов.
Модуль аналогового ввода 13 и радар-процессор 14, входящие в устройство обработки, целевыделения и выработки параметров движения 7, выполнены на основе современных цифровых электронных компонентов, таких как программируемые логические интегральные схемы, цифровые сигнальные процессоры обработки сигналов, аналого-цифровые преобразователи, микросхемы прямого цифрового синтеза сигналов, микросхемы динамической памяти.
Вычислительное устройство 8 выполнено на базе IBM PC совместимой электронной вычислительной машины.
Панель управления 10 имеет набор кнопок, трекбол, органы управления помехозащитой, оптоэлектронные преобразователи визиров направления и дальности.
Автоматическая навигационная радиолокационная станция кругового обзора работает в S-диапазоне частот, может производить автоматический анализ надводной обстановки без участия оператора и выдавать рекомендации судоводителю для обеспечения безопасности плавания судов в особо сложных условиях.
Для увеличения необслуживаемого периода автономной работы в автоматическую навигационную радиолокационную станцию введена система допускового и параметрического контроля, выполненная на программно-аппаратном уровне. Для реализации этой системы, в антенном посту 1 происходит контроль следующих параметров:
- связь с источником питания модулятора;
- работоспособность источника питания модулятора;
- напряжение накала магнетрона;
- напряжение высокое магнетрона;
- ток магнетрона;
- работоспособность модулятора магнетрона;
- признак включения вращения антенны;
- наличие сигнала курсового угла антенны;
- наличие сигнала отметки курса;
- работоспособность привод вращения антенны;
- работоспособность приемника;
- контроль импульсной мощности;
- уровень износа магнетрона;
- работоспособность программируемой логической интегральной схемы;
- наличие связи с устройством обработки, целевыделения и выработки параметров движения 7;
- наработка приемопередатчика 5;
- признак работоспособности всего антенного поста 1.
В автомате включения резервного электропитания 3 происходит контроль следующих параметров:
- наличие основного питания ~50 Гц 220 В;
- наличие резервного питания ~50 Гц 220 В;
- значение постоянного напряжения 24 В аварийного источника электропитания;
- работоспособность составных частей;
- режим работы автомата включения резервного электропитания 3;
- признак работоспособности всего автомата включения резервного электропитания 3.
В устройстве обработки, целевыделения и выработки параметров движения 7 происходит контроль следующих параметров:
- наличие импульса запуска индикатора;
- наличие аналогово видеосигнала;
- наличие сигнала курсового угла антенны;
- наличие сигнала отметки курса;
- наличие связи с антенным постом 1;
- код ошибки устройства обработки, целевыделения и выработки параметров движения 7.
В пульте управления 2 происходит контроль следующих параметров:
- работоспособность вычислительного устройства 8;
- работоспособность панели управления 10;
- работоспособность CAN контролера в вычислительном устройстве 8;
- наличие связи вычислительного устройства 8 по шине CAN с автоматом включения резервного электропитания 3;
- наличие связи вычислительного устройства 8 по шине CAN с антенным постом 1;
- наличие связи вычислительного устройства 8 по каналу Ethernet с антенным постом 1;
- наличие связи вычислительного устройства 8 по каналу Ethernet с устройством обработки, целевыделения и выработки параметров движения 7;
- наличие данных от гирокомпаса;
- наличие данных от лага;
- наличие данных от спутниковой навигационной системы;
- наличие данных от автоматизированной информационной системы;
- наличие данных радиолокационной информации от устройства обработки, целевыделения и выработки параметров движения 7;
- признак работоспособности всего пульта управления 2.
Прогнозируемые основные технические характеристики автоматической навигационной радиолокационной станции для конкретного примера:
- импульсная излучаемая мощность - 30 кВт;
- частотный диапазон - 10 см;
- ширина диаграммы направленности - 2 градуса;
- Длительность зондирующих импульсов - 0.06, 0.16, 0.3, 0.63, 1 и 1,2 мкс;
- скорость обзора - 24 об/мин;
- минимальная дальность обнаружения - 30 м;
- разрешающая способность по дальности - 20 м;
- разрешающая способность по пеленгу - 2.2 градуса
- потребляемая мощность - не более 500 Вт;
- электропитание от сети переменного тока с напряжением 220 В, 50 Гц;
- автоматическое переключение с основной сети на резервную сеть переменного тока с напряжением 220 В, 50 Гц или на аварийный источник питания постоянного тока с напряжением 24 В;
- суммарный вес оборудования - не более 300 кг;
- средняя наработка на отказ - 2500 часов.
Работает автоматическая навигационная радиолокационная станция следующим образом. Автомат включения резервного электропитания 3 проводит анализ наличия основного и резервного электропитания с напряжением 220 В, 50 Гц и измеряет значение постоянного напряжения 24 В аварийного источника питания. При наличии всех напряжений электропитания, автомат включения резервного электропитания 3 выдает на антенный пост 1 и на пульт управления 2 напряжение от сети основного электропитания с напряжением 220 В, 50 Гц. При его отсутствии автомат включения резервного электропитания 3 подключает сеть резервного электропитания с напряжением 220 В, 50 Гц. При отсутствии сети резервного электропитания автомат включения резервного электропитания 3 подключает аварийный источник питания с напряжением 24 В. Модуль питания 12 преобразует напряжение 220 В, 50 Гц, поступающее от автомата включения резервного электропитания 3, в напряжение постоянного тока 24 В и выдает его на все устройства пульта управления 2. При отсутствии основного и резервного электропитания 220 В, 50 Гц модуль питания 12 отключается, напряжение 24 В аварийного источника питания с выхода автомата включения резервного электропитания 3 поступает на все устройства пульта управления 2. Радар-процессор 14 выдает команду на включение вращения в антенный пост 1. Опорно-поворотное устройство 6 осуществляет вращение антенны 4 вокруг вертикальной оси. Также радар-процессор 14 выдает команду на включение излучения в антенный пост 1. Передающее устройство в приемопередатчике 5 формирует импульсы СВЧ заданной мощности и длительности. Для улучшения подавления квазисинхронных импульсных помех от других РЛС, а также для подавления ложных отметок на неоднозначных дальностях в приемопередатчике 5 предусмотрена вобуляция периода следования импульсов. Антенна 4 излучает зондирующие сигналы в эфир и принимает отраженные от препятствий радиолокационные эхо-сигналы. Приемное устройство в приемопередатчике 5 производит предварительное усиление и обработку эхо-сигналов. С выхода приемопередатчика 5 сигналы поступают в модуль аналогового ввода 13, который осуществляет их усиление и преобразование в цифровую форму. Одновременно с этим в модуль аналогового ввода 13 от приемопередатчика 5 поступают импульсы синхронизации, обеспечивающие определение дальности до препятствия, от которого получены отраженные эхо-сигналы. От опорно-поворотного устройства 6 в модуль аналогового ввода 13 поступают импульсы углового положения антенны. Модуль аналогового ввода 13 передает оцифрованные эхо-сигналы в радар-процессор 14. Радар-процессор 14 производит цифровую обработку радиолокационных эхо-сигналов, для чего осуществляет некогерентное внутриимпульсное и межпериодное накопление огибающей радиолокационных эхо-сигналов и подавление несинхронных помех от однотипных и аналогичных РЛС. Затем радар-процессор 14 передает обработанные сигналы по каналу Ethernet в коммутатор 9. Коммутатор 9 по каналам Ethernet выдает сигналы в вычислительное устройство 8, со скоростью 100 МБит/с. Вычислительное устройство 8 преобразует полученные сигналы в формат телевизионного изображения и выдает полученную картинку на видеомонитор 11. Вычислительное устройство 8 хранит и обрабатывает информацию электронных карт, обрабатывает информацию, полученную от приемника автоматизированной информационной системы, интегрирует ее с радиолокационным изображением и выдает на видеомонитор 11. Кроме того, вычислительное устройство 8 по каналу Ethernet через коммутатор 9 получает oт внешних устройств видсонаблюдения видеоизображение, которое выдает на видеомонитор 11. Видеомонитор 11 отображает полученную информацию на жидкокристаллическом экране с разрешением 1920×1080 точек. Управление режимами работы автоматической навигационной радиолокационной станцией осуществляет оператор при помощи панели управления 10. Коммутатор 9 имеет возможность передавать информацию от приемопередатчика 5, радар-процессора 14 и от вычислительного устройства 8 по каналу Ethernet на внешний модуль оператора.
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина
Катализатор, способ его приготовления и способ получения малосернистого дизельного топлива
Катализатор для получения сверхвысокомолекулярного полиэтилена
Способ получения хлопчатобумажной ткани технического назначения с комплексом защитных свойств от кислот и нефтепродуктов
Координатный стол
Стенд для контроля точности контурных перемещений промышленного робота
Эпоксиполиэфирная лакокрасочная композиция
Способ сбора штормовых выбросов морских водорослей
Фотохромная регистрирующая среда для трехмерной оптической памяти
Устройство для преобразования изменения сопротивления в напряжение
Устройство для защиты емкостного накопителя энергии
Катализатор, способ его приготовления и способ получения β-пиколина

