Результат интеллектуальной деятельности: АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН
Вид РИД
Изобретение
Изобретение относится к электронной технике и автоматике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин (температуры, скорости, ускорения, перемещения, давления, производительности и т.д.) с отрицательной обратной связью, применяемых в различных отраслях промышленности и в научных исследованиях для управления нестационарными объектами, то есть объектами, меняющими со временем коэффициенты своего математического описания.
Высокоточное управление нестационарными динамическими объектами актуально во многих отраслях промышленности, техники, технологии и науки. Эти задачи решаются с помощью адаптивных систем (называемых еще самонастраивающимися системами), в которых осуществляются соответствующие изменения коэффициентов регулятора для обеспечения неизменных свойств системы в целом, вопреки изменениям свойств объекта. Например, если коэффициент усиления объекта уменьшается, то коэффициент усиления регулятора должен увеличиться, и наоборот. Если изменяется несколько коэффициентов объекта, то столь однозначной связи между этими изменениями и требуемыми изменениями регулятора иногда не существует. Поэтому задача адаптивного управления состоит из двух подзадач: определения изменений коэффициентов динамических объектов и вычисления требуемых изменений коэффициентов регулятора. Количество изменяемых коэффициентов объекта может быть различным. Количество изменяемых коэффициентов регулятора, как правило, не превышает трех, поскольку наиболее распространенный вид регулятора имеет три тракта воздействия на объект: пропорциональный, интегрирующий и дифференцирующий, в зависимости от того действия, которое этот тракт осуществляет по отношению к ошибке управления.
Известна адаптивная система для регулирования и стабилизации физических величин, содержащая:
объект управления,
сумматор-вычитатель,
управляемый регулятор,
генератор гармонических сигналов по заданной программе,
анализатор характеристик,
устройство самонастройки
[из статьи В.А.Жмудь, Д.О.Терешкин, «Обоснование новой классификации адаптивных систем автоматического регулирования» в сборнике «Труды семинара по автоматике и программной инженерии, посвященном 40-летнему юбилею ОАО «Новосибирский институт программных систем», Новосибирск, 2012 г., стр.71, рис.47; электронная версия журнала: http://www.nips.ru/images/stories/pdfs/Pros_NIPS-2012.pdf].
Входом системы является положительный вход вычитателя, выходом системы является выход объекта управления.
Эта система работает следующим образом.
Генератор гармонических сигналов по заданной программе формирует малые по величине гармонические сигналы, частота которых задается анализатором характеристик по некоторой встроенной в него программе, например, по линейно нарастающему закону, плавно или дискретно. Сигналы с входа и с выхода объекта управления подаются на входы анализатора характеристик и анализируются им. Этот анализатор характеристик определяет зависимость отношений амплитуд на выходе и на входе объекта управления от частоты этих сигналов на его входе. По результатам этого анализа, анализатор характеристик рассчитывает оптимальный регулятор, информация о результатах этого расчета подается на устройство самонастройки, которое осуществляет управление изменениями коэффициентов управляемого регулятора, за счет чего и реализуются адаптивные свойства адаптивной системы для регулирования и стабилизации физических величин.
Существенным недостатком описанной адаптивной системы для регулирования и стабилизации физических величин является низкое быстродействие и недостаточная точность. Для эффективной работы системы требуется оценка модели объекта в широком диапазоне частот, что и приводит к снижению быстродействия и, как следствие, к ухудшению точности, а также повышает сложность системы. Для расчета регулятора адаптивная система для регулирования и стабилизации физических величин использует информацию о многих значениях амплитудно-частотной характеристики в относительно широком диапазоне частот. Эта информация снимается в последовательном режиме, а именно используется генератор гармонических сигналов по заданной программе, который должен изменять частоту генерируемого сигнала под управлением анализатора характеристик. Каждый полный цикл измерения требует значительного времени. Необходимость охвата широкого частотного диапазона вызывает необходимость формирования тестовых сигналов и в рабочей области частот, в которой такие помехи нежелательны, поскольку они ухудшают точность системы.
Таким образом, такая система не обладает достаточной точностью и быстродействием.
Наиболее близкой к заявляемой является адаптивная система для регулирования и стабилизации физических величин, содержащая
объект управления,
вычитатель,
управляемый регулятор,
имитатор желаемого математического описания разомкнутого контура,
имитатор обращенного математического описания объекта,
анализатор сигналов,
вычислитель,
причем вычитатель, управляемый регулятор, объект управления, анализатор сигналов через его первый вход и вычислитель последовательно соединены, входом системы является неинвертирующий вход вычитателя, выход объекта соединен с инвертирующим входом вычитателя и является выходом системы, выход вычислителя соединен с управляющим входом управляемого регулятора, а выход регулятора соединен со вторым входом анализатора сигналов
[К.П.Власов. Теория автоматического управления. Учебное пособие. Харьков: Издательство Гуманитарный центр. 2007. Стр.443, рис.4.40].
Эта система работает следующим образом. Основной контур управления образован объектом управления, вычитателем и управляемым регулятором. Стартовое значение коэффициентов математического описания (МО) объекта управления приближенно известно. Оно описывается передаточной функцией WO и используется для определения стартовых коэффициентов настройки управляемого регулятора. Управляемый регулятор состоит из двух последовательно включенных блоков, первый из которых обладает передаточной функцией WЖ, соответствующей желаемому МО разомкнутого контура, а второй блок обладает передаточной функцией WК, обратной по отношению к известному стартовому МО объекта, то есть обеспечивается приближенное равенство

При последовательном соединении элементов в контуре эквивалентная передаточная функция всего контура WЭ равна произведению передаточных функций элементов, находящихся в этом контуре. Поэтому передаточная функция контура равна

В силу соотношения (1) достигается примерное равенство эквивалентной передаточной функции всего контура WЭ ее желаемому значению WЖ:

Таким образом, в исходном состоянии управляемый регулятор настроен на начальные коэффициенты объекта управления и адаптивная система обладает желаемыми свойствами, поэтому она устойчива и выполняет свои функции успешно.
В ходе работы адаптивной системы на нее действуют внешние неизвестные факторы F, которые заставляют объект управления медленно изменять коэффициенты своего МО. Анализатор сигналов анализирует входной и выходной сигнал объекта, передает результат анализа на вход вычислителя, на основании чего вычислитель вычисляет новые значения передаточной функции объекта управления, а по ним вычисляет значения обратной передаточной функции объекта и управляет вторым блоком управляемого регулятора таким образом, чтобы его передаточная функция оставалась равной обратной передаточной функции объекта.
В этой адаптивной системе задача анализатора сигналов состоит в том, чтобы вычислить текущие динамические характеристики объекта управления, изменяющиеся под воздействием неизвестных факторов F, вычислитель на основании этой изменяющейся во времени информации определяет изменяющиеся во времени коэффициенты управляемого регулятора и вводит их управляемый регулятор.
Основным недостатком этой адаптивной системы является невозможность ее реализации для большинства реальных объектов управления, поскольку объект управления зачастую содержит элемент запаздывания. Наличие элемента запаздывания в составе передаточной функции объекта WO делает невозможным реализацию второго блока управляемого регулятора, а следовательно, и всего управляемого регулятора в целом. Элемент запаздывания формирует на своем выходе сигнал лишь по истечении некоторого времени после появления его на входе этого элемента. Обратную функцию по отношению к элементу запаздывания физически реализовать невозможно, поскольку такой элемент, обратный элементу запаздывания, должен был бы предугадывать и формировать на своем выходе входной сигнал до того, как он появился на его входе. Таким образом, для большого числа реальных объектов управления такая адаптивная система для регулирования и стабилизации физических величин не может быть применена вследствие невозможности реализации управляемого регулятора, если объект управления содержит элемент запаздывания.
Другим недостатком данного устройства является недостаточное быстродействие. Необходимость точного определения многих коэффициентов объекта управления с помощью анализатора сигналов вынуждает конструировать его на основе использования корреляционных методов, в которых высокая точность достигается лишь в случае чрезвычайно длительного осреднения результатов, особенно в присутствии возмущающего воздействия F. Поэтому высокая точность определения коэффициентов объекта управления в анализаторе сигналов может быть достигнута лишь с низким быстродействием, а недостаточная точность определения этих коэффициентов не позволяет осуществить эффективную работу контура адаптации, состоящего из анализатора сигналов, вычислителя и управляемого регулятора. Поэтому этот недостаток приводит к невозможности обеспечения достаточного быстродействия системы.
Таким образом, такая система не обладает достаточным быстродействием и не может широко применяться, поскольку не позволяет управлять объектом с запаздыванием.
Изобретение решает задачу повышения быстродействия и расширения области применения.
Поставленная задача решается тем, что с помощью предварительных модельных исследований синтезируется плавная зависимость всех коэффициентов управляемого регулятора от единственного входного параметра К, данный параметр впоследствии используется для вычисления всех коэффициентов управляемого регулятора и методом тестовой девиации осуществляется настройка управляемого регулятора на экстремум целевой функции по этому параметру К. С этой целью в устройство вводятся генератор тестовой девиации, второй вычитатель, второй вычислитель, синхронный детектор и регулятор контура адаптации, а первый вычислитель осуществляет вычисления коэффициентов регулятора по величине параметра К и по известной зависимости коэффициентов от этой величины.
Для отыскания зависимости коэффициентов управляемого регулятора от параметра К все множество возможных значений коэффициентов объекта управления предварительно разбивается на ограниченное количество подмножеств, в пределах которых задача управления может быть обеспечена управляемым регулятором с фиксированными коэффициентами.
Во многих практических случаях все множество получаемых вариантов настройки управляемого регулятора может быть упорядочено вдоль оси единственного условного параметра К. Например, для этого может быть построена зависимость коэффициентов интегрирующего и дифференцирующего тракта от коэффициента пропорционального тракта, после чего эти зависимости могут быть аппроксимированы плавными кривыми линиями, например, методом полиномиальной аппроксимации. Даже если эти зависимости не однозначны, то есть одному значению параметра К соответствует несколько значений коэффициентов, в ряде случаев среднее значение этих коэффициентов может успешно использоваться в качестве коэффициентов управляемого регулятора. Данное соображение подтверждается модельным исследованием и может быть продемонстрировано практическими примерами. Пример и метод отыскания таких зависимостей даны в статье «Жмудь В.А., Полищук А.В. Расчет множества коэффициентов регуляторов для объекта с двумя нестационарными параметрами, Сборник научных трудов НГТУ, 2012, №3(69), стр.59-70» (графики зависимостей даны на рис.7 и 8 этой статьи). В итоге получаем зависимость всей группы коэффициентов регулятора от единственного входного параметра К. Если такую зависимость получить не удалось, то данная предлагаемая адаптивная система для регулирования и стабилизации физических величин не применима к управлению таким объектом управления.
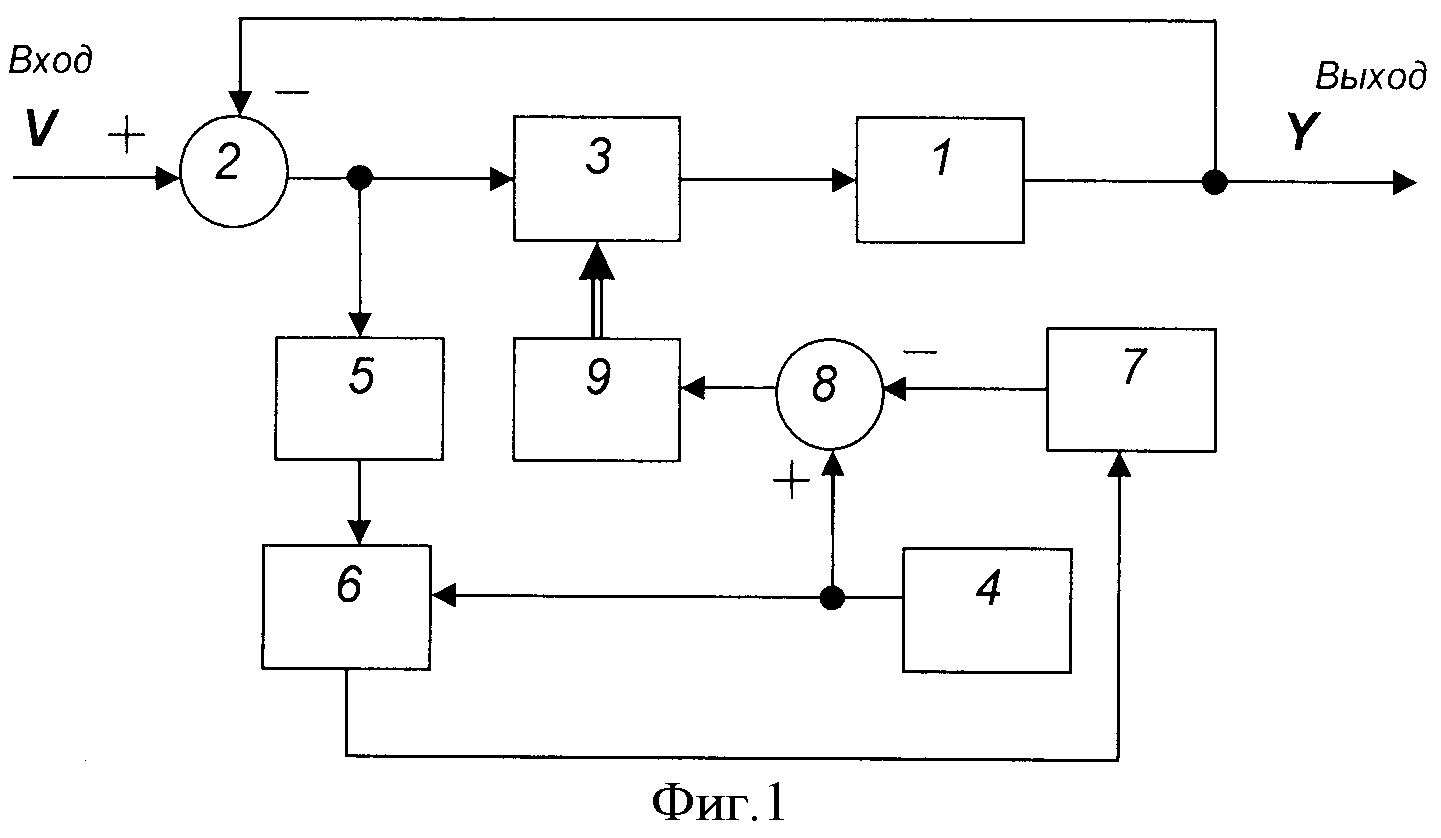
После отыскания указанной зависимости коэффициентов регулятора от единственного параметра К адаптивная система для регулирования и стабилизации физических величин строится по следующей структурной схеме: основной контур управления образуется соединенными петлей элементами: объектом управления, первым вычитателем и управляемым регулятором. Контур адаптации строится соединенными последовательно вторым вычислителем, подключенным к выходу первого вычитателя, синхронным детектором, регулятором контура адаптации, вторым вычитателем и первым вычислителем, а для успешной работы синхронного детектора в систему вводится генератор, выход которого подключен к вторым входам синхронного детектора и второго вычитателя.
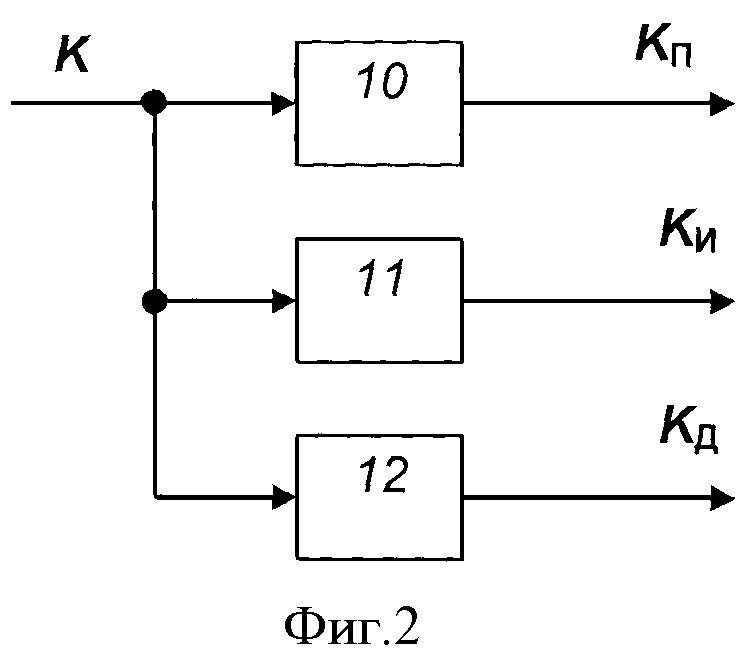
На фигуре 1 показана схема предлагаемой адаптивной системы для регулирования и стабилизации физических величин, на фигуре 2 показана схема второго вычислителя.
Предлагаемая адаптивная система для регулирования и стабилизации физических величин содержит:
1 - объект управления,
2 - первый вычитатель,
3 - управляемый регулятор,
4 - генератор,
5 - первый вычислитель,
6 - синхронный детектор,
7 - регулятор контура адаптации,
8 - второй вычитатель,
9 - второй вычислитель.
Входом системы является положительный вход сумматора-вычитателя 2. Выходом системы является выход объекта управления 1. Выход первого вычитателя соединен с его же инвертирующим входом через последовательно включенные управляемый регулятор и объект управления. Также выход первого вычитателя соединен с управляющим входом управляемого регулятора через последовательно соединенные второй вычислитель, синхронный детектор, регулятор контура адаптации второй вычитатель по его инвертирующему входу и первый вычислитель. Выход генератора соединен с опроным входом синхронного детектора и с неинвертирующим входом второго вычитателя.
Второй вычислитель (фигура 2) содержит:
10 - вычислитель заданной функции КП(К),
11 - вычислитель заданной функции КИ(К),
12 - вычислитель заданной функции КД(К).
При этом все три вычислителя заданной функции соединены с входом второго вычислителя, а их выходы являются выходами этого второго вычислителя.
Все элементы системы, кроме объекта управления, могут быть реализованы на микроконтроллере, оснащенном АЦП на каждом входе и ЦАП на каждом выходе.
Эта адаптивная система для регулирования и стабилизации физических величин работает следующим образом.
В исходном состоянии математическое описание объекта управления 1 известно и это позволяет настроить управляемый регулятор, то есть задать его коэффициенты. Математическая модель объекта в общем виде и диапазон изменения всех коэффициентов этой модели известен, а в случае, если эти коэффициенты изменяются совместно, например, в зависимости от какого-либо внешнего параметра, например температуры, то эта известная связь также используется для определения зависимости, связывающей наиболее эффективные коэффициенты регулятора с формальным параметром К. Это позволяет перестраивать все коэффициенты регулятора одновременно и синхронно по различным зависимостям, определенным предварительно, обозначаемым КП(К), КИ(К), КД(К) для зависимостей пропорционального, интегрирующего и дифференцирующего трактов, соответственно. В этом случае настройка управляемого регулятора сводится к реализации аппаратной или программной зависимости этих функций и к отысканию оптимального значения параметра К. Первоначальную настройку обозначим К0.
В ходе работы адаптивной системы вследствие действия неизвестных внешних факторов и воздействий коэффициенты объекта управления изменяются, что нарушает качество настройки управляемого регулятора. Качество настройки оценивается вторым вычислителем, который осуществляет вычисление наперед заданной функции F(t), например, интеграла от модуля ошибки за фиксированное время:

Здесь Т - интервал осреднения, t - текущее время, е(τ) - ошибка управления, τ - величина, аналогичная времени (обозначена другим символом для того, чтобы отличать ее от времени, используемом для обозначения границ интервала интегрирования).
Поскольку величина ошибки зависит от качества адаптивной системы, а следовательно, и от качества настройки управляемого регулятора, и поскольку коэффициенты управляемого регулятора зависят от параметра К, следовательно и величина критерия качества зависит от значения этого параметра К. Первоначальная настройка управляемого регулятора осуществляется за счет установки начального состояния регулятора контура адаптации 7. Выходное значение сигнала этого регулятора контура адаптации 7, поступая на вход первого вычислителя 9 через второй вычитатель 8, задает выходные значения этого первого вычислителя, которые и определяют коэффициенты управляемого регулятора 3. Генератор 4, воздействуя через второй вычитатель 8 на вход первого вычислителя 9, заставляет его вычислять новые значения коэффициентов управляемого регулятора 3, которые изменяются в небольших пределах по периодическому закону, например, по гармоническому закону. Период частоты модуляции, формируемой генератором 4, должен быть существенно (не менее чем в 10 раз) больше, чем время интегрирования Т. В итоге функция (1), вычисляемая вторым вычислителем, также изменяет свои значения по периодическому закону, синхронно с изменениями выходного сигнала генератора 4. Синхронный детектор осуществляет умножение этой функции с выхода второго вычислителя на сигнал модуляции, формируемый генератором 4, а результат усредняет во времени, получаемый выходной сигнал через регулятор контура адаптации 7 и второй вычитатель 8 воздействует на вход первого вычислителя, заставляя его изменять вычисляемые коэффициенты в ту сторону, которая соответствует наименьшему среднему значению функции (1). Контур адаптации, образуемый элементами 4-9, работает по принципу экстремальной системы автоматического регулирования, то есть системы, настраивающейся на минимум целевой функции (1). В результате работа этого контура обеспечивает минимальное значение целевой функции (1). Достижение минимального значения этой функции соответствует наилучшей настройке управляемого регулятора 3. В результате управляемый регулятор системы 3 оказывается настроенным по критерию минимума целевой функции (1), что обеспечивает достижение устойчивости, наилучшего быстродействия этого основного контура управления, а следовательно, и наилучшее качество всей адаптивной системы.
В отличие от прототипа, в данной адаптивной системе не требуется вычисление статистическими методами точной математической модели объекта, изменяющейся во времени. Предварительные вычисления зависимостей КП(К), КИ(К) и KД(K) могут быть осуществлены методом математического моделирования, например, с использованием программ MATLAB или VisSim.
Таким образом, предлагаемая адаптивная система для регулирования и стабилизации физических величин отличается повышенным быстродействием.
При действии данной адаптивной системы не требуется вычисления и реализации обратной передаточной функции по отношению к передаточной функции объекта управления. Поэтому если объект управления содержит элемент запаздывания, это никак не препятствует эффективному действию предлагаемой адаптивной системы. Поэтому данная адаптивная система может быть применена и к таким объектам, которые содержат элемент запаздывания, к которым не может быть применена адаптивная система, взятая за прототип. Таким образом, предлагаемая адаптивная система для регулирования и стабилизации физических величин решает задачу расширения области применения.
Все устройство, кроме объекта управления, может быть реализовано на микроконтроллере с соответствующим количеством входов и выходов и с АЦП на всех входах и ЦАП на всех выходах.
Расчет зависимости коэффициентов регулятора от параметра К может быть осуществлен, например, как это обеспечено в статье «Жмудь В.А., Полищук А.В. Расчет множества коэффициентов регуляторов для объекта с двумя нестационарными параметрами, Сборник научных трудов НГТУ, 2012, №3(69), стр.59-70».
Адаптивная система для объекта с запаздыванием
Фазометр с гетеродинным преобразованием частоты
Автономный приемник рентгеновского и ультрафиолетового излучения
Измеритель линейных перемещений
Система с обратной связью
Система с обратной связью
Фазометр с гетеродинным преобразованием частоты
Структура модели для оптимизации системы с обратной связью
Система управления с обратной связью
Фазометр
Регулятор переменного напряжения
Способ измерения дисперсии внутрирезонаторных оптических элементов в спектральной области генерации фемтосекундного лазера
Способ управления двухкатушечным электромагнитным двигателем возвратно-поступательного движения
Смесь для изготовления керамической плитки
Способ проветривания систем горных выработок
Синхронный электромагнитный ударный механизм
Синхронный электромагнитный двигатель возвратно-поступательного движения
Электромагнитный двигатель возвратно-поступательного движения
Фазометр с гетеродинным преобразованием частоты
Устройство дифференциальной защиты силового трансформатора

