Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ СОСТАВЛЯЮЩЕЙ ПРЯМОЙ СВЯЗИ ДЛЯ ПОДАВЛЕНИЯ ИЗБЫТОЧНОГО ОТКЛИКА НА СТУПЕНЧАТОЕ ВОЗДЕЙСТВИЕ ВО ВРЕМЯ СТУПЕНЧАТОГО СЛЕЖЕНИЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к способу и устройству автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения, которые используют для автоматической регулировки составляющей прямой связи при подавлении избыточного отклика на ступенчатое воздействие от ступенчатой целевой величины с помощью обеспечения управления с прямой связью для системы, которая имеет характеристики сходимости к ступенчатой целевой величине, после того как происходит избыточный отклик на ступенчатое воздействие во время ступенчатого слежения от ступенчатой целевой величины.
Уровень техники
Обычно системы управления широко классифицируют на управление с обратной связью и управление с прямой связью. Что касается управления с PID (пропорционально-интегральная производная), которое широко используют в качестве управления с обратной связью, известны различные способы автоматической регулировки (см., например, патентную литературу (PTL) 1).
С другой стороны, что касается управления с прямой связью, традиционно предложен способ задания объекта управления и автоматической регулировки составляющей прямой связи с использованием подробной модели объекта управления в системе управления с двумя степенями свободы (см., например, PTL 2).
Широко известно, что когда ступенчатую целевую величину вводят (предоставляют) в качестве цели управления, система управления с обратной связью или объект управления, включающий в себя вибрационный элемент, такой как элемент, управляющий давлением текучей среды, демонстрирует характеристики сходимости ступенчатого слежения к фиксированной величине, соответствующей ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от ступенчатой целевой величины.
Список ссылок
Патентная литература
PTL 1: выложенная японская патентная публикация № Н11-161301;
PTL 2: японский патент № 3545006.
Раскрытие изобретения
Техническая проблема
В соответствии со способом, описанным в PTL 1, автоматическая регулировка может быть выполнена без использования подробной модели объекта управления. Однако этот способ ограничен управлением PID, которое является управлением с обратной связью.
Способ, описанный в PTL 2, является способом автоматической регулировки, связанным с управлением с прямой связью. Однако этот способ требует подробной модели объекта управления. Для того чтобы создать подробную модель объекта управления, требуется задать физические характеристики объекта управления на стадии проектирования, что требует времени и усилия.
В виду этого, изобретатели вывели и обнаружили, что при выполнении управления с прямой связью для подавления избыточного отклика на ступенчатое воздействие в системе, которая имеет характеристики сходимости ступенчатого слежения к фиксированной величине, соответствующей ступенчатой целевой величине, после того как происходит избыточный отклик на ступенчатое воздействие во время ступенчатого слежения от ступенчатой целевой величины, введенной в качестве цели управления, как упомянуто выше, составляющая прямой связи для управления с прямой связью может быть автоматически отрегулирована без требования подробной модели. В результате, изобретателями создано настоящее изобретение, основанное на двух основных свойствах, а именно линейности и инвариантности времени, которые приближенно существуют во многих системах управления, таких как механические системы и электрические станции.
Следовательно, настоящее изобретение имеет целью предоставление способа и устройства автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения, которые дают возможность, при подавлении избыточного отклика на ступенчатое воздействие от ступенчатой целевой величины с помощью обеспечения управления с прямой связью для системы, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от ступенчатой целевой величины, введенной в качестве цели управления, составляющей прямой связи быть автоматически регулируемой с использованием двух основных свойств, т.е. линейности и инвариантности времени, и отклика системы.
Решение проблемы
Для того чтобы решить проблему, указанную выше, настоящим изобретением, в соответствии с пунктом 1, является способ автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения в структуре, в которой блок управления с прямой связью расположен перед системой, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от входной ступенчатой целевой величины, причем способ автоматической регулировки содержит: получение ступенчатого отклика системы на ступенчатую целевую величину в состоянии, в котором блок управления с прямой связью выключен, затем аппроксимацию ступенчатого отклика в приближенный отклик с помощью установки точки, соответствующей максимальной величине ступенчатого отклика, как максимума избыточного отклика на ступенчатое воздействие, определение степени избыточного отклика на ступенчатое воздействие α на основе величины максимума избыточного отклика на ступенчатое воздействие и значения ступенчатой целевой величины, установку прошедшего времени от момента, когда предоставляется ступенчатая целевая величина, до момента, когда достигнут максимум избыточного отклика на ступенчатое воздействие в ступенчатом отклике, как времени запаздывания ступенчатого отклика и времени возрастания ступенчатого отклика Т , и установку приближенного отклика таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т
, и установку приближенного отклика таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т , и после этого автоматическую регулировку блока управления с прямой связью таким образом, что блок управления с прямой связью выводит сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T
, и после этого автоматическую регулировку блока управления с прямой связью таким образом, что блок управления с прямой связью выводит сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
Кроме того, время запаздывания ступенчатого отклика устанавливают во время от момента, когда предоставляют ступенчатую целевую величину в систему, до точки возрастания отклика, а время возрастания ступенчатого отклика устанавливают во время от точки возрастания отклика до максимума избыточного отклика на ступенчатое воздействие в ступенчатом отклике, где точка возрастания отклика является точкой, в которой величина, полученная с помощью применения вторичного дифференциального фильтра к ступенчатому отклику системы на ступенчатую целевую величину, является максимальной.
Кроме того, система является системой управления с обратной связью или объектом управления.
Кроме того, настоящим изобретением, в соответствии с пунктом 4, является устройство автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения в структуре, в которой блок управления с прямой связью расположен перед системой, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от входной ступенчатой целевой величины, причем устройство автоматической регулировки содержит: функциональный блок для получения ступенчатого отклика системы на ступенчатую целевую величину в состоянии, в котором блок управления с прямой связью выключен, функциональный блок для аппроксимации ступенчатого отклика в приближенный отклик с помощью установки точки, соответствующей максимальной величине ступенчатого отклика, как максимума избыточного отклика на ступенчатое воздействие, определения степени избыточного отклика на ступенчатое воздействие α на основе величины максимума избыточного отклика на ступенчатое воздействие и значения ступенчатой целевой величины, установки прошедшего времени от момента, когда предоставлена ступенчатая целевая величина, до момента, когда достигнут максимум избыточного отклика на ступенчатое воздействие в ступенчатом отклике, как времени запаздывания ступенчатого отклика и времени возрастания ступенчатого отклика Т , и установки приближенного отклика таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т
, и установки приближенного отклика таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т , и функциональный блок для автоматической регулировки блока управления с прямой связью с помощью подачи в блок управления с прямой связью команды, чтобы вывести сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T
к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
, и функциональный блок для автоматической регулировки блока управления с прямой связью с помощью подачи в блок управления с прямой связью команды, чтобы вывести сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T
к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
Полезные эффекты изобретения
В соответствии с настоящим изобретением, могут быть получены следующие отличные полезные эффекты.
(1) Способ и устройство для составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения в структуре, в которой блок управления с прямой связью расположен перед системой, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от входной ступенчатой целевой величины: получают ступенчатый отклик системы на ступенчатую целевую величину в состоянии, в котором блок управления с прямой связью выключен, аппроксимируют ступенчатый отклик в приближенный отклик с помощью установки точки, соответствующей максимальной величине ступенчатого отклика, как максимума избыточного отклика на ступенчатое воздействие, определяют степень избыточного отклика на ступенчатое воздействие α на основе величины максимума избыточного отклика на ступенчатое воздействие и значения ступенчатой целевой величины, устанавливают прошедшее время от момента, когда предоставлена ступенчатая целевая величина, до момента, когда достигнут максимум избыточного отклика на ступенчатое воздействие в ступенчатом отклике, как время запаздывания ступенчатого отклика и время возрастания ступенчатого отклика Т , и устанавливают приближенный отклик таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т
, и устанавливают приближенный отклик таким образом, чтобы он линейно сходился от максимума избыточного отклика на ступенчатое воздействие до ступенчатой целевой величины за время сходимости, равное времени возрастания ступенчатого отклика Т , и автоматически регулируют блок управления с прямой связью таким образом, что блок управления с прямой связью выводит сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T
к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
, и автоматически регулируют блок управления с прямой связью таким образом, что блок управления с прямой связью выводит сигнал, полученный с помощью применения задержки первого порядка коэффициента log(α/(1+α))/T
к ступенчатой целевой величине, введенной в блок управления с прямой связью в качестве цели управления.
Таким образом, составляющая прямой связи как содержание управляющего сигнала блока управления с прямой связью, расположенного перед системой, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения от входной ступенчатой целевой величины, может быть автоматически отрегулирована с использованием двух основных свойств, т.е. линейности и инвариантности времени, и отклика системы без требования подробной модели системы.
(2) Кроме того, сигнал, включающий в себя задержку первого порядка предварительно определенного коэффициента, выведенный из автоматически регулируемого блока управления с прямой связью дает возможность управления с прямой связью таким образом, что отклик системы быстро отслеживает ступенчатую целевую величину в состоянии, в котором подавлен избыточный отклик на ступенчатое воздействие.
Краткое описание чертежей
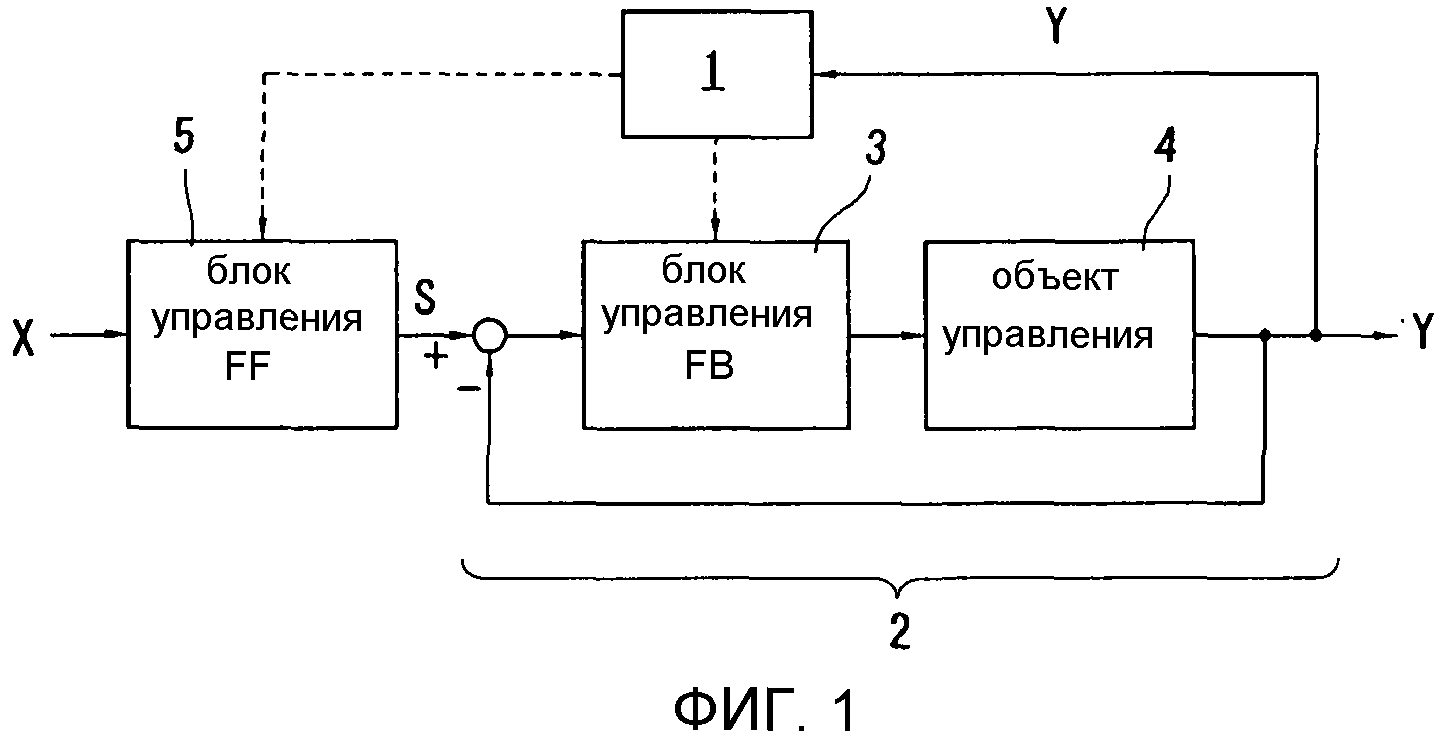
Фиг.1 - блок-схема, изображающая первый вариант осуществления способа и устройства автоматической регулировки, в соответствии с настоящим изобретением.
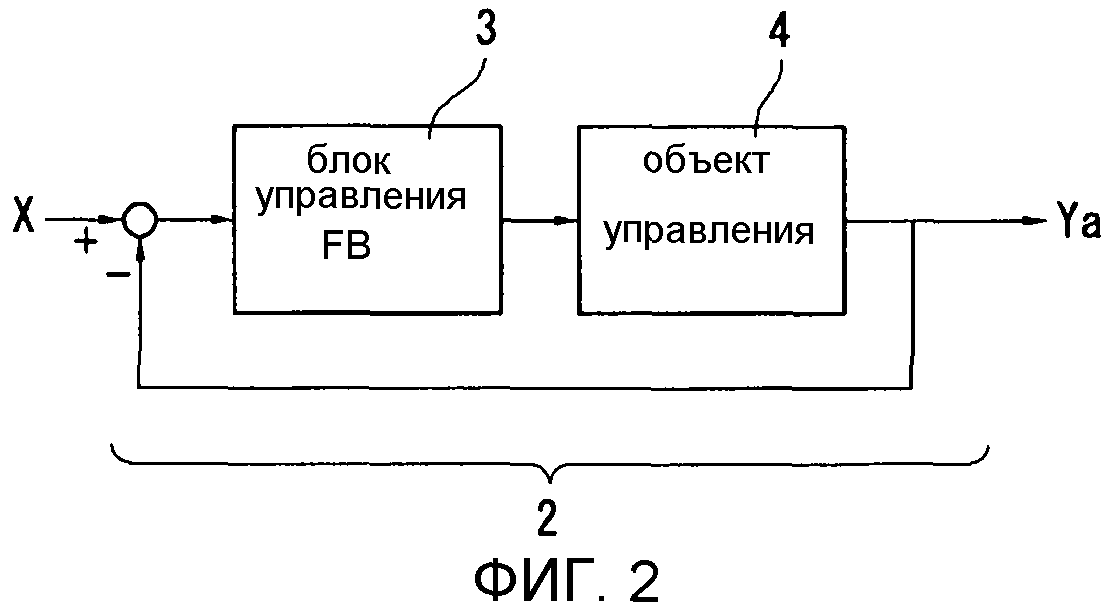
Фиг.2 - блок-схема, изображающая ситуацию, в которой устройство автоматической регулировки на Фиг.1 получает ступенчатый отклик из системы управления с обратной связью в состоянии, в котором блок управления FF выключен.
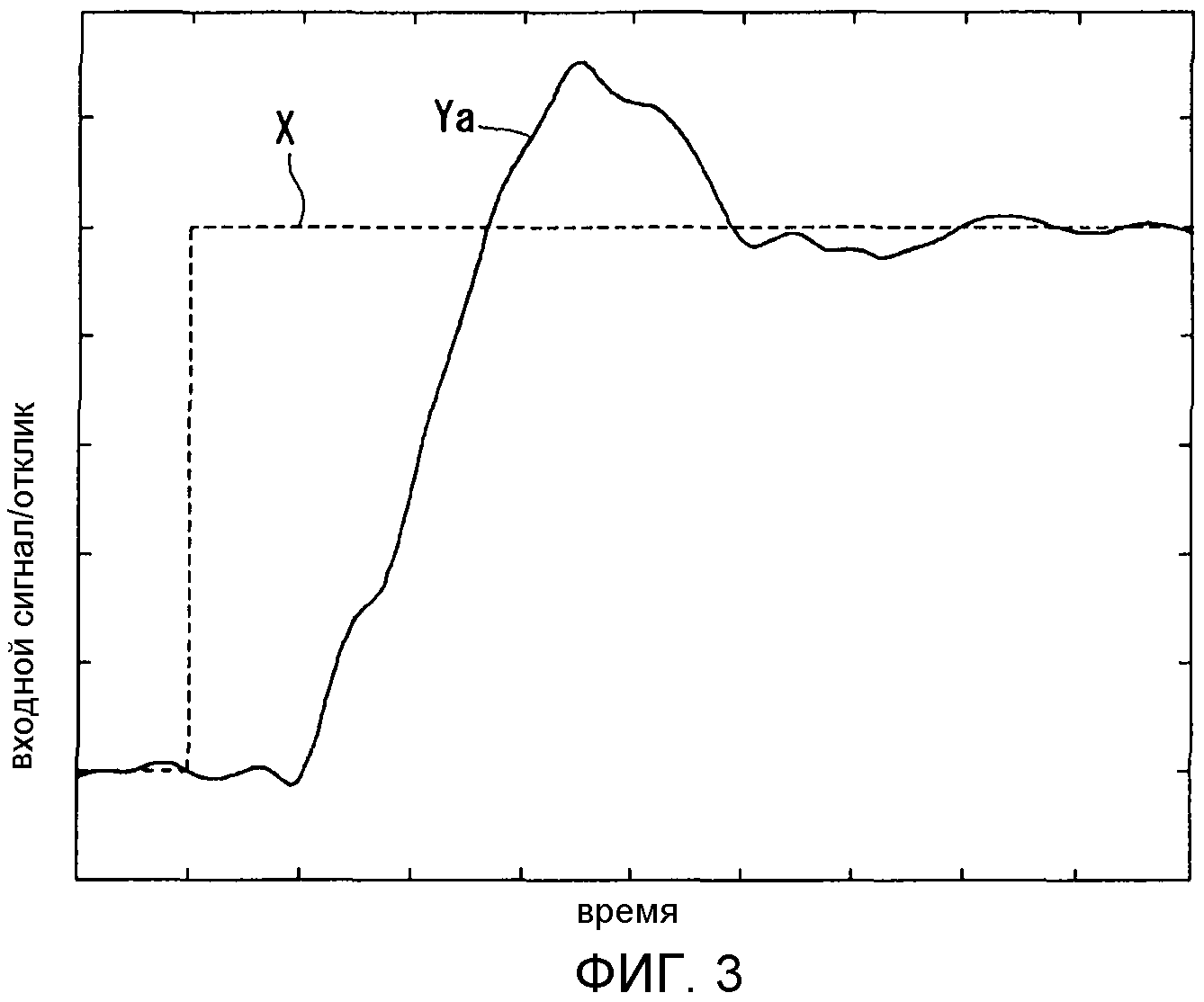
Фиг.3 - диаграмма, изображающая изменение времени ступенчатого отклика на Фиг.2.
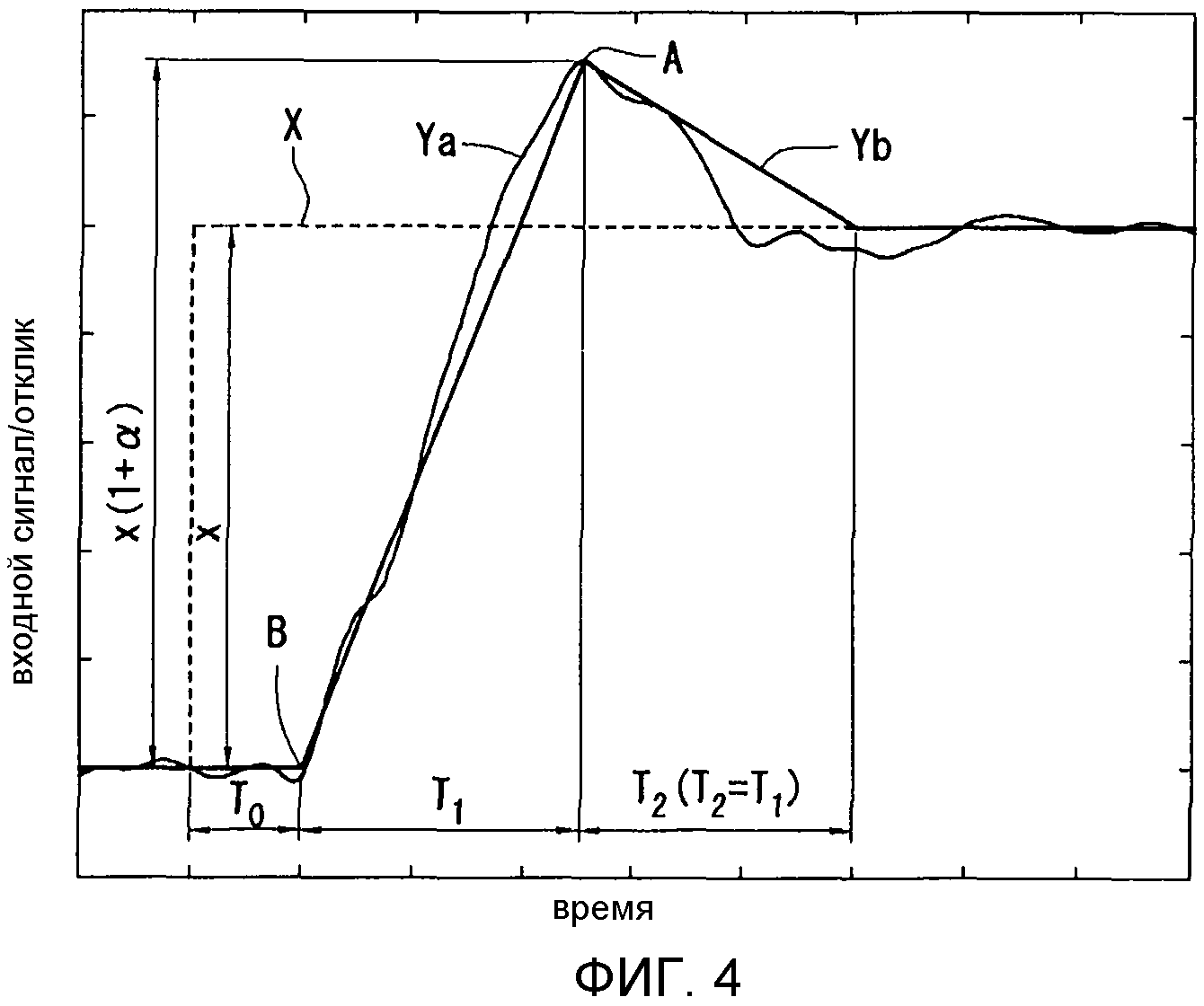
Фиг.4 - диаграмма, изображающая приближенный отклик, установленный с помощью аппроксимации ступенчатого отклика на Фиг.3.
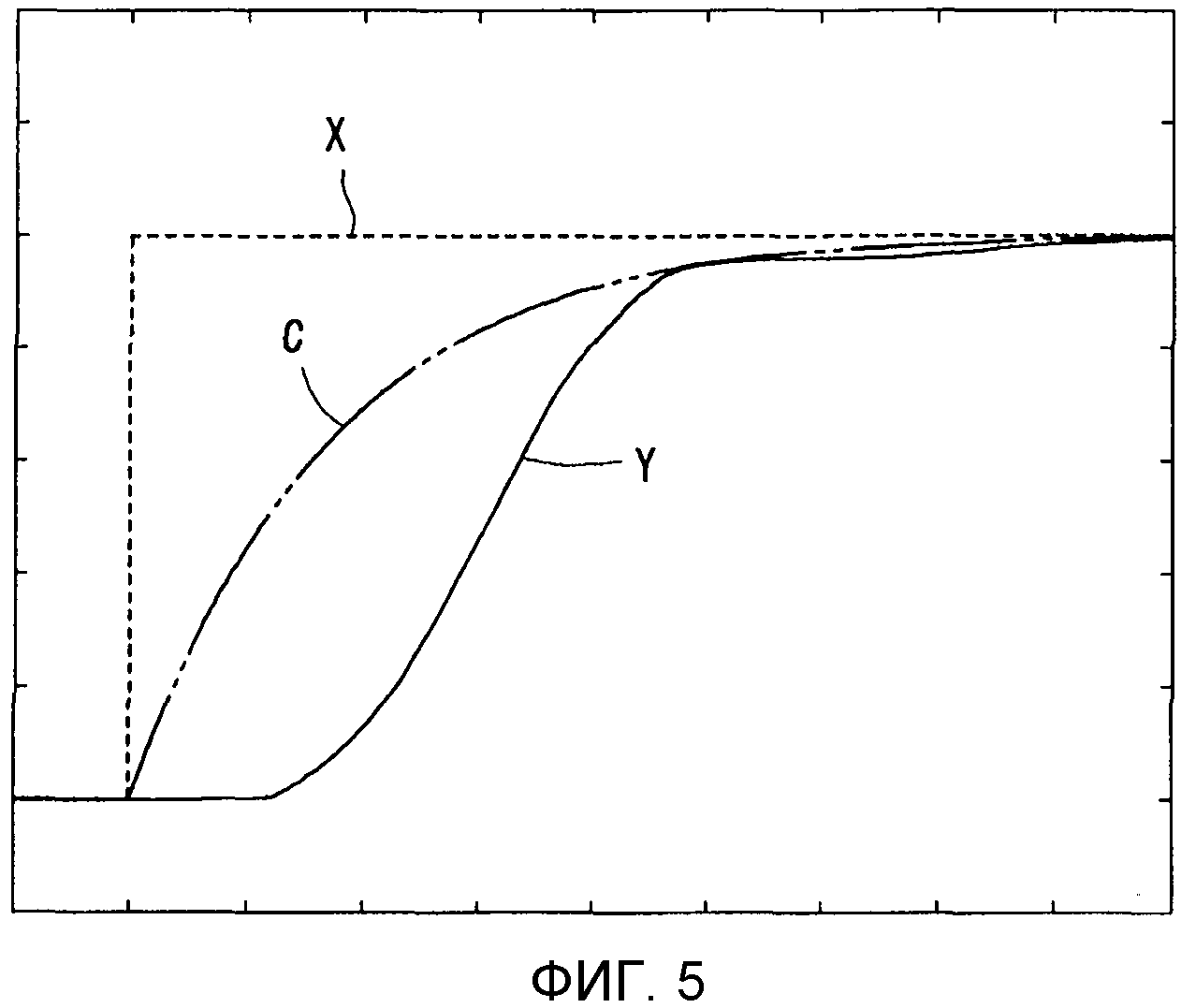
Фиг.5 - диаграмма, изображающая отклик объекта управления в системе управления с обратной связью, в которую введен сигнал, полученный с помощью применения задержки первого порядка к ступенчатой целевой величине в блоке управления FF, для того чтобы устранить избыточный отклик на ступенчатое воздействие от ступенчатой целевой величины.
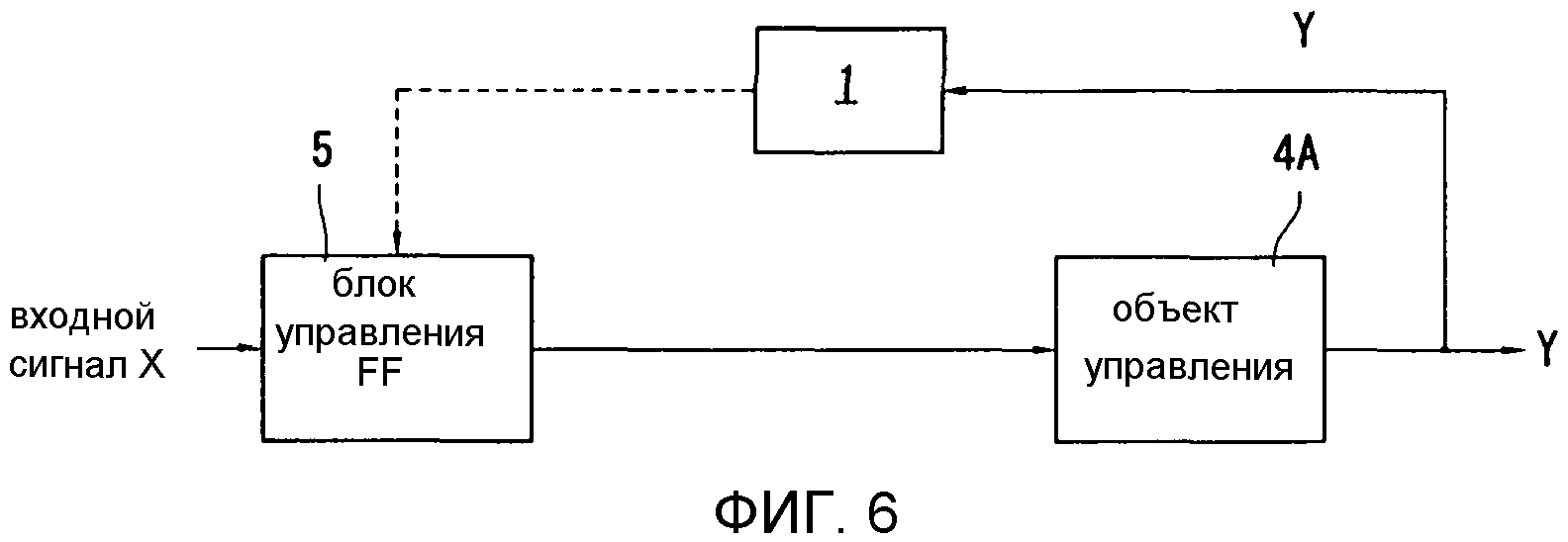
Фиг.6 - блок-схема, изображающая второй вариант осуществления способа и устройства автоматической регулировки, в соответствии с настоящим изобретением.
Осуществление изобретения
Последующее описывает варианты осуществления для выполнения настоящего изобретения со ссылкой на чертежи.
Фиг.1-5 - диаграммы, изображающие первый вариант осуществления способа и устройства автоматической регулировки, в соответствии с настоящим изобретением.
Этот вариант осуществления предоставляет обзор примера применения в случае подавления избыточного отклика на ступенчатое воздействие от ступенчатой целевой величины с помощью управления с прямой связью для такой системы, как система управления с обратной связью, которая имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения к входной ступенчатой целевой величине.
Этот вариант осуществления описан ниже.
Как изображено на Фиг.1, система управления, к которой применен способ и устройство автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения, в соответствии с настоящим изобретением, имеет структуру, в которой блок управления с прямой связью (далее в настоящем документе упомянутый как блок управления FF) 5 является автоматически регулируемым с помощью устройства 1 автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения, в соответствии с настоящим изобретением (далее в настоящем документе упомянутого просто как устройство 1 автоматической регулировки, в соответствии с настоящим изобретением) расположен перед системой 2 управления с обратной связью, сформированной с помощью последовательного соединения блока управления с обратной связью (далее упомянутого в настоящем документе как блок управления FB) 3 и объекта 4 управления.
Устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, которое применено к системе управления вышеупомянутой структуры, сконфигурировано с возможностью приема входного сигнала отклика (выходной величины) Y, выведенного из объекта 4 управления, управляемого с обратной связью с помощью системы 2 управления с обратной связью. Устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, также имеет функциональный блок для управления блоком 3 управления FB и блоком 5 управления FF и функциональный блок для подачи в блок 5 управления FF команды, определенной с помощью нижеупомянутого процесса на основе отклика Y после ввода отклика Y из объекта 4 управления, управляемого с обратной связью.
Блок 5 управления FF имеет функциональный блок для вывода сигнала S, полученного с помощью применения задержки первого порядка к входному сигналу ступенчатой целевой величины в качестве цели управления, как изображено с помощью линии С на Фиг.5, описанной позже.
Блок 3 управления FB может использовать любой тип способа линейного управления, такой как управление PID, оптимальное управление регулятора или управление с бесконечностью Н, который используют для обычного управления с обратной связью.
Управление с бесконечностью Н, упомянутое в настоящем документе, является способом управления для оценки производительности системы управления с помощью индекса, названного “нормой бесконечности Н”, и оптимальной установки параметра управления с обратной связью (таким образом, чтобы минимизировать норму бесконечности Н). Этот способ управления является подходящим для устойчивого к ошибкам управления (управления, которое имеет дело с неопределенным объектом управления).
Далее описаны функции устройства 1 автоматической регулировки, в соответствии с настоящим изобретением, в соответствии с процедурой в устройстве 1 автоматической регулировки, в соответствии с настоящим изобретением.
Сначала устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, регулирует блок 3 управления FB в состоянии, в котором блок управления 5 FF выключен, то есть в состоянии, в котором ступенчатую целевую величину Х в качестве цели управления непосредственно вводят в систему 2 управления с обратной связью, составленную из блока 3 управления FB и объекта 4 управления, как изображено на Фиг.2.
В настоящем документе блок 3 управления FB может быть отрегулирован с помощью метода проб и ошибок. В случае когда способом управления блока 3 управления FB является управление PID, блок 3 управления FB может быть отрегулирован с использованием существующего способа автоматической регулировки.
После завершения регулировки блока 3 управления FB, как описано выше, устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, предоставляет ступенчатую целевую величину Х в систему 2 управления с обратной связью, включающую в себя отрегулированный блок 3 управления FB, и получает ступенчатый отклик Ya только системы 2 управления с обратной связью в состоянии, в котором блок 5 управления FF выключен. Поскольку система 2 управления с обратной связью имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после того как происходит избыточный отклик на ступенчатое воздействие во время ступенчатого слежения от входной ступенчатой целевой величины Х, ступенчатый отклик Ya, например, является таким, как изображено с помощью сплошной линии на Фиг.3. Пунктирная линия на Фиг.3 изображает ступенчатую целевую величину Х в качестве цели управления (то же самое применимо к Фиг.4, 5, описанным далее).
Затем устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, аппроксимирует полученный ступенчатый отклик Ya, чтобы вычислить приближенный отклик (аппроксимированный ступенчатый отклик) Yb, как изображено на Фиг.4.
Подробно, аппроксимацию выполняют следующим образом. Как изображено на Фиг.4, точку, соответствующую максимальной величине в ступенчатом отклике Ya, устанавливают как максимум избыточного отклика на ступенчатое воздействие А и степень α избыточного отклика на ступенчатое воздействие определяют на основе величины максимума избыточного отклика на ступенчатое воздействие А и уровня (величины) х данной ступенчатой целевой величины Х таким образом, что величина максимума избыточного отклика на ступенчатое воздействие А равна х(1+α).
Кроме того, прошедшее время Т от момента, когда ступенчатую целевую величину Х предоставляют в систему 2 управления с обратной связью, до момента, когда ступенчатый отклик Ya достигает максимума избыточного отклика на ступенчатое воздействие А, делят на время запаздывания ступенчатого отклика Т0 и время возрастания ступенчатого отклика Т1. Приближенный отклик Yb устанавливают таким образом, чтобы он линейно возрастал до максимума избыточного отклика на ступенчатое воздействие А во время возрастания ступенчатого отклика Т1 после того, как проходит время запаздывания ступенчатого отклика Т0, с момента, когда ступенчатую целевую величину Х предоставляют в систему 2 управления с обратной связью, а затем линейно сходился к ступенчатой целевой величине Х во время сходимости Т2 (Т2=Т1), равное времени возрастания ступенчатого отклика Т1.
В настоящем документе время запаздывания ступенчатого отклика Т0 и время возрастания ступенчатого отклика Т1 предпочтительно определяют таким образом, что время запаздывания ступенчатого отклика T0 равно времени от момента, когда ступенчатую целевую величину Х предоставляют в систему 2 управления с обратной связью, до точки возрастания отклика В, а время возрастания ступенчатого отклика T1 равно времени от точки возрастания отклика В до максимума избыточного отклика на ступенчатое воздействие в ступенчатом отклике Ya, где точка возрастания отклика В является точкой, в которой величина, полученная с помощью применения вторичного дифференциального фильтра [1, -2, 1] к ступенчатому отклику Ya, является максимальной.
Вторичный дифференциальный фильтр [1, -2, 1] является операцией свертки данных временной последовательности цифрового сигнала и [1, -2, 1] и является процессом фильтрации аппроксимации вторичного дифференциального коэффициента сигнала.
Таким образом, время запаздывания ступенчатого отклика T0 и время возрастания ступенчатого отклика T1 могут быть вычислены автоматически, и может быть получен приближенный отклик Yb, который лучше отражает изменение ступенчатого отклика Ya.
После того как приближенный отклик Yb определен вышеупомянутым способом, устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, на основе линейности и инвариантности времени системы 2 управления с обратной связью, вычисляет сигнал S, который должен быть введен в систему 2 управления с обратной связью, чтобы приближенный отклик Yb, изображенный на Фиг.4, отслеживал ступенчатую целевую величину Х без избыточного отклика на ступенчатое воздействие, с использованием времени возрастания ступенчатого отклика T1 и степени избыточного отклика на ступенчатое воздействие α в приближенном отклике Yb в качестве параметров. Чтобы дать возможность блоку 5 управления FF, в который введена ступенчатая целевая величина Х, вывести сигнал S, устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, выдает, в блок 5 управления FF, команду, чтобы вывести сигнал S, полученный с помощью применения задержки первого порядка коэффициента (величины, обратной постоянной времени) log(α/(1+α))/T1 к ступенчатой целевой величине Х, введенной в качестве цели управления.
То есть в системе управления, изображенной на Фиг.1, включающей в себя устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, имеющим вышеупомянутую структуру, когда ступенчатую целевую величину Х в качестве цели управления вводят в блок 5 управления FF, блок 5 управления FF автоматически регулируется на основе команды из устройства 1 автоматической регулировки, в соответствии с настоящим изобретением, таким образом, что блок 5 управления FF выводит в систему 2 управления с обратной связью сигнал S, полученный с помощью применения задержки первого порядка установленного выше предварительно определенного коэффициента (величины, обратной постоянной времени) к ступенчатой целевой величине Х, как изображено с помощью линии С на Фиг.5.
В результате, системой 2 управления с обратной связью, в которую вводится сигнал S, полученный с помощью применения задержки первого порядка предварительно определенного коэффициента (величины, обратной постоянной времени) к ступенчатой целевой величине Х и выведенный из блока 5 управления FF, управляют таким образом, что отклик Y объекта 4 управления плавно отслеживает ступенчатую целевую величину без избыточного отклика на ступенчатое воздействие, как изображено на Фиг.5.
Таким образом, с помощью способа автоматической регулировки составляющей прямой связи для подавления избыточного отклика на ступенчатое воздействие во время ступенчатого слежения, в соответствии с настоящим изобретением, и устройства 1 автоматической регулировки, в соответствии с настоящим изобретением, составляющая прямой связи как содержание управляющего воздействия блока 5 управления FF, расположенного перед системой 2 управления с обратной связью, которая имеет, в качестве первоначальных характеристик ступенчатого слежения, характеристики сходимости к ступенчатой целевой величине Х, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения к ступенчатой целевой величине Х, введенной в качестве цели управления, может быть автоматически отрегулирована с использованием двух основных свойств, т.е. линейности и инвариантности времени, и отклика системы 2 управления с обратной связью без требования подробной модели системы 2 управления с обратной связью. Это дает возможность отклику Y объекта 4 управления в системе 2 управления с обратной связью быстро отслеживать ступенчатую целевую величину Х в состоянии, в котором подавлен избыточный отклик на ступенчатое воздействие.
Фиг.6 - блок-схема, изображающая второй вариант осуществления способа и устройства автоматической регулировки, в соответствии с настоящим изобретением.
Этот вариант осуществления предоставляет обзор примера применения в случае подавления избыточного отклика на ступенчатое воздействие от ступенчатой целевой величины с помощью управления с прямой связью для объекта 4А управления в ситуации, в которой сам объект 4А управления имеет характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения к входной ступенчатой целевой величине.
Этот вариант осуществления описан ниже.
В той же структуре, что и на Фиг.1, блок 5 управления FF, автоматически регулируемый с помощью устройства 1 автоматической регулировки, в соответствии с настоящим изобретением, расположен перед самим объектом 4А управления вместо системы 2 управления с обратной связью. Устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, сконфигурировано с возможностью приема входного сигнала отклика (выходной величины) Y, выведенного из объекта 4А управления. В настоящем документе принимается, что объект 4А управления имеет линейность и инвариантность времени относительно управляющего воздействия.
Причем это имеет место в той же процедуре, что и изображена на Фиг.2-5, устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, сначала вычисляет ступенчатый отклик Ya (см. Фиг.3) при предоставлении ступенчатой целевой величины Х в объект 4А управления в состоянии, в котором блок 5 управления FF выключен, и вычисляет приближенный отклик Yb с помощью определения максимума избыточного отклика на ступенчатое воздействие А, степень избыточного отклика на ступенчатое воздействие α, время запаздывания ступенчатого отклика T0, время возрастания ступенчатого отклика T1 и время сходимости T2 (T2=T1), равное времени возрастания ступенчатого отклика T1 в ступенчатом отклике Ya (см. Фиг.4).
Затем с использованием степени избыточного отклика на ступенчатое воздействие α и времени возрастания ступенчатого отклика T1 в качестве параметров устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, выдает команду в блок 5 управления FF, чтобы вывести сигнал S, полученный с помощью применения задержки первого порядка коэффициента (величины, обратной постоянной времени) log(α/(1+α))/T1 к ступенчатой целевой величине Х, введенной в качестве цели управления.
В результате, объект 4А управления, в который введен сигнал S, включающий в себя задержку первого порядка, выведенный из блока 5 управления FF, выводит отклик Y объекта 4А управления в состоянии, в котором подавлен избыточный отклик на ступенчатое воздействие, как в отклике Y системы 2 управления с обратной связью, изображенной на Фиг.5.
Таким образом, в соответствии с этим вариантом осуществления, составляющая прямой связи как содержание управляющего воздействия блока 5 управления FF, расположенного перед объектом 4А управления, который имеет в качестве первоначальных характеристик ступенчатого слежения характеристики сходимости ступенчатого слежения к ступенчатой целевой величине Х, после возникновения избыточного отклика на ступенчатое воздействие во время ступенчатого слежения к ступенчатой целевой величине, введенной в качестве цели управления, может быть автоматически отрегулирована с использованием двух основных свойств, т.е. линейности и инвариантности времени, и отклика объекта 4А управления без требования подробной модели объекта 4А управления. Это дает возможность отклику Y объекта 4А управления быстро отслеживать ступенчатую целевую величину Х в состоянии, в котором подавлен избыточный отклик на ступенчатое воздействие.
Настоящее изобретение не ограничено вариантами осуществления, описанными выше, и блок 5 управления FF, который автоматически отрегулирован один раз, может быть опять автоматически отрегулирован. В этом случае отклик Y объекта 4 или 4А управления, когда ступенчатая целевая величина Х вводится в блок 5 управления FF, получают в состоянии, в котором блок 5 управления FF выключен, коэффициент (величину, обратную постоянной времени) задержки первого порядка определяют на основе полученного отклика Y, таким же образом, что и в вышеупомянутом обычном автоматическом регулировании, и результат сложения этого коэффициента с предыдущим коэффициентом устанавливают в качестве нового коэффициента.
Настоящее изобретение применимо к любой системе 2 управления с обратной связью и объекту 4А управления, пока они имеют характеристики сходимости ступенчатого слежения к ступенчатой целевой величине, после того как происходит избыточный отклик на ступенчатое воздействие во время ступенчатого слежения к ступенчатой целевой величине, введенной в качестве цели управления.
Если приближенный отклик Yb, изображенный на Фиг.4, может быть установлен на основе ступенчатого отклика Ya, полученного в состоянии, в котором блок 5 управления FF выключен, так что время возрастания ступенчатого отклика T1 до максимума избыточного отклика на ступенчатое воздействие А и время сходимости T2 равны друг другу, время запаздывания ступенчатого отклика T0 может быть изменено по сравнению со случаем, в котором время запаздывания ступенчатого отклика T0 равно времени от момента, когда предоставлена ступенчатая целевая величина Х, до точки возрастания отклика В, где точка возрастания отклика В является точкой, в которой величина, полученная с помощью применения вторичного дифференциального фильтра [1, -2, 1] к ступенчатому отклику Ya, является максимальной.
В варианте осуществления, изображенном на Фиг.1-5, функциональный блок для автоматической регулировки блока 3 управления FB может быть не включен в устройство 1 автоматической регулировки, в соответствии с настоящим изобретением. В этом случае блок 3 управления FB может быть заранее автоматически отрегулирован с помощью другого устройства, до того как устройство 1 автоматической регулировки, в соответствии с настоящим изобретением, начнет автоматическую регулировку блока 5 управления FF.
Следует понимать, что различные другие изменения также могут быть сделаны без отклонения от объема настоящего изобретения.
Список ссылочных обозначений
1 - устройство автоматической регулировки
2 - система управления с обратной связью (система)
3 - блок управления с обратной связью (блок управления FB)
4, 4А - объект управления
5 - блок управления с прямой связью (блок управления FF)
α - степень избыточного отклика на ступенчатое воздействие
А - максимум избыточного отклика на ступенчатое воздействие
В - точка возрастания отклика
Х - ступенчатая целевая величина
Ya - ступенчатый отклик
Yb - приближенный отклик
S - сигнал
T0 - время запаздывания ступенчатого отклика
T1 - время возрастания ступенчатого отклика
T2 - время сходимости
Турбина
Спрямляющий аппарат вентилятора и турбовентиляторный двигатель
Зажимное устройство
Монокристаллический суперсплав на основе ni и содержащая его лопатка турбины
Жаростойкий компонент
Лопатка газотурбинного двигателя для воздушного судна и способ ее изготовления
Способ обнаружения отрезка прямой
Привод клапана
Электрическая система руления летательного аппарата и способ для управления системой
Устройство для формования композитного элемента, армированного волокнами
Способ определения свойства топлива и устройство определения свойства топлива
Способ конструирования цилиндрического резервуара
Устройство распознавания трехмерного объекта и способ распознавания трехмерного объекта
Электрически проводящая структура для реактивного двигателя
Конструкция лопатки статора и турбовентиляторный реактивный двигатель с использованием такой лопатки
Уплотнение для турбовентиляторного двигателя
Композитная лопасть и способ изготовления композитной лопасти
Турбина
Средство отслеживания крутящего момента двигателя
Способ изготовления рельсов

