Результат интеллектуальной деятельности: СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ
Вид РИД
Изобретение
Изобретение относится к области определения координат местоположения скрытых ферромагнитных объектов, от подводных лодок и неразорвавшихся боеприпасов (бомб, снарядов, донных мин) до зарытых единиц стрелкового оружия (винтовка, автомат, пистолет) и т.д.
Многие сосредоточенные источники магнитного поля можно аппроксимировать (точечным) диполем с магнитным моментом М=Mm, где М - модуль магнитного момента, m - единичный вектор направления магнитного момента. Различают задачи обнаружения, пеленгации и локализации (неподвижного или движущегося) диполя по параметрам его магнитного поля, измеренным в одной или нескольких точках наблюдения. При локализации определяют радиус-вектор X=Rn, где R - модуль расстояния, n - единичный вектор направления или координаты вектора X в системе координат наблюдения. При пеленгации определяют единичный вектор направления n или направляющие косинусы углов его в системе координат наблюдения. При обнаружении определяют факт наличия неоднородного магнитного поля на фоне поля Земли.
Первое решение задачи пеленгации в явном виде по градиенту вектора дипольной индукции получил C.Frahm [W.M.Wynn а.о. Advanced Superconducting Gradiometer/Magnetometer Arrays and a Novel Signal Processing Technique // IEEE Transactions on Magnetics, vol. MAG-11, no.2, March 1975. P.701-707]. Решение было неоднозначным. Оно включало 4 направления, одно из которых было истинным, остальные три - ложными. Вместе с тем решение Frahm'a оставалось нераскрытым.
Первое решение задачи локализации в явном виде получил T.Kolbenhayer [Prispevok krieseniu obratenej magnetometrickey ulohy predipol // Banickey listy. 1976. #4 31-35 (Реферативный Журнал Геология. 1980. №12. C.20)] по заданным вектору и градиенту вектора дипольной индукции, опираясь на теорему Эйлера для однородных функций. Однако решение Kolben-hayer'a оказалось неустойчивым к ориентации искомого диполя.
Затем в работе [В.Г.Семенов. Решение обратной задачи для источника физического поля дипольной или квадрупольной модели // Методы и средства точных магнитных измерений / Сб. научных трудов НПО «ВНИИМ им. Д.И.Менделеева». 1980. С.3-19] в результате решения в общем виде характеристического уравнения для градиента решение Фрама было упрощено:


где ni, mi - единичные направления искомых радиус-вектора i=1, 2, 3, 4 - индекс пары решений;
λ1, λ2, λ3 и u2, u3 - собственные числа (λ2≥λ1≥λ3) и векторы матрицы (3×3) градиента индукции дипольного поля в точке наблюдения D;
N - скалярная интенсивность градиента D;
µ0 - магнитная постоянная;
М - значение магнитного момента искомого источника;
R - расстояние до искомого источника от точки наблюдения.
Таким образом, если в произвольной точке измерен градиент индукции D, то стандартными методами определяют его собственные числа и векторы, затем по (1) находят единичное направление на искомый диполь, направление его магнитного момента, а также отношение величин М к R4 (но не сами эти величины). Решение (1) неоднозначно (одно какое-то из 4 - истинное, остальные 3 - ложные).
Там же [1980] получено однозначное и устойчивое решение задачи локализации в виде

где В - вектор индукции дипольного поля в точке наблюдения.
Позднее для (1) и (2) были выведены выражения СКО погрешностей пеленгации σn и локализации σх [В.Г.Семенов и А.Я.Зайончковский. Сравнительный анализ градиентных методов локализации источников магнитного поля дипольной модели. Сб. научных трудов «Создание средств измерений для метрологического обеспечения прецизионных нанотесламетров». ВНИИМ им. Менделеева. Л-д. 1988 г. С.56-67].


где φ=m·n;  - СКО погрешностей измерения компоненты приращения дипольной индукции;
- СКО погрешностей измерения компоненты приращения дипольной индукции;  - СКО погрешностей измерения компоненты дипольной индукции; L - база градиентометра.
- СКО погрешностей измерения компоненты дипольной индукции; L - база градиентометра.
Выражения (3) и (4) были перепроверено компьютерным моделированием [Ю.М.Иванов и В.Г.Семенов. Оценки погрешностей пеленгации и локализации источника магнитного поля дипольной модели // Измерительная техника №5. 2008. С.30-35 и №7. 2008. С.72].
Из выражения (3) следует, что метод пеленгации (1) расходится в окрестности φ2≈1, это обстоятельство осталось незамеченным в работе [1980].
Выражение СКО (4) состоит из двух слагаемых, зависящих от
и  . В работе [Р.Б. Семевский и др. Специальная магнитометрия. СПб. Наука. 2002. С.36 и 37] приводятся освоенные уровни СКО для компонентных первичных преобразователей
. В работе [Р.Б. Семевский и др. Специальная магнитометрия. СПб. Наука. 2002. С.36 и 37] приводятся освоенные уровни СКО для компонентных первичных преобразователей  и
и  . То есть
в 30 раз хуже
. То есть
в 30 раз хуже  , что авторы [2002] объясняют недостаточной точностью учета вариаций магнитного поля Земли. Отсюда следует, что участие вектора дипольной индукции В в (2) серьезно ограничивает точностные возможности и перспективы метода локализации (2). Поэтому была предпринята попытка добавить к методу пеленгации (1) измерение приращения (разности) вектора В на увеличенной базе ΔВ и обратить метод пеленгации (1) в метод локализации [Иванов Ю.М., Семенов В.Г. Способ локализации магнитного диполя. Патент РФ №2456642 от 20.07.2012 г.]. Частично попытка удалась. Компьютерное моделирование способа локализации [2012] дало результаты, сопоставимые по точности с методом (2), причем в отличие от (2), способ [2012] позволял осуществить локализацию в движении. Однако способ [2012] не дал заметного запаса в точности и дальности локализации в сравнении с методом (2). Дело в том, что способ [2012] объединял решение в явном виде по градиенту D (относительно ni, mi) и численное решение по приращению ΔВ (относительно расстояния R). Первое требовало уменьшения базы градиента, второе - увеличения расстояния между опорной точкой и точкой градиента. Это противоречие явилось причиной дополнительного ограничения точности и дальности локализации по способу [2012].
, что авторы [2002] объясняют недостаточной точностью учета вариаций магнитного поля Земли. Отсюда следует, что участие вектора дипольной индукции В в (2) серьезно ограничивает точностные возможности и перспективы метода локализации (2). Поэтому была предпринята попытка добавить к методу пеленгации (1) измерение приращения (разности) вектора В на увеличенной базе ΔВ и обратить метод пеленгации (1) в метод локализации [Иванов Ю.М., Семенов В.Г. Способ локализации магнитного диполя. Патент РФ №2456642 от 20.07.2012 г.]. Частично попытка удалась. Компьютерное моделирование способа локализации [2012] дало результаты, сопоставимые по точности с методом (2), причем в отличие от (2), способ [2012] позволял осуществить локализацию в движении. Однако способ [2012] не дал заметного запаса в точности и дальности локализации в сравнении с методом (2). Дело в том, что способ [2012] объединял решение в явном виде по градиенту D (относительно ni, mi) и численное решение по приращению ΔВ (относительно расстояния R). Первое требовало уменьшения базы градиента, второе - увеличения расстояния между опорной точкой и точкой градиента. Это противоречие явилось причиной дополнительного ограничения точности и дальности локализации по способу [2012].
Способ [2012] выбран в качестве прототипа заявляемого способа по совокупности существенных признаков, наиболее близких к нему.
Известный способ локализации источника магнитного поля дипольной модели включает одновременные измерения приращений (разностей) индукции магнитного поля между удаленной опорной точкой и точкой на каждой полуоси системы координат, а также измерение расстояний между этими точками и определение по результатам измерений искомых радиуса-вектора до источника и его магнитного момента.
Причиной, препятствующей достижению указанного ниже технического результата для известного способа, является то, что известный способ основан на измерении градиента, что по определению предполагает ограничения размера баз приращений в зоне измерения градиента.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении точности и дальности локализации.
Технический результат, получаемый при осуществлении изобретения, заключается в возможности повышения базы каждого приращения до конструктивно удобного предела ради повышения точности и дальности локализации.
Указанный технический результат достигается тем, что заявляемый способ локализации источника магнитного поля дипольной модели, включающий одновременные измерения приращений индукции магнитного поля между опорной точкой и точкой на каждой полуоси системы координат, а также измерение расстояний между точками и определение по результатам измерений искомых радиус-вектора до источника и его магнитного момента, отличается тем, что опорную точку совмещают с центром системы координат, размер базы каждого приращения повышают до конструктивно удобного предела, при этом все искомые величины определяют численно без обращения к измерениям градиента.
На Фиг.1 изображена схема реализации заявляемого способа.
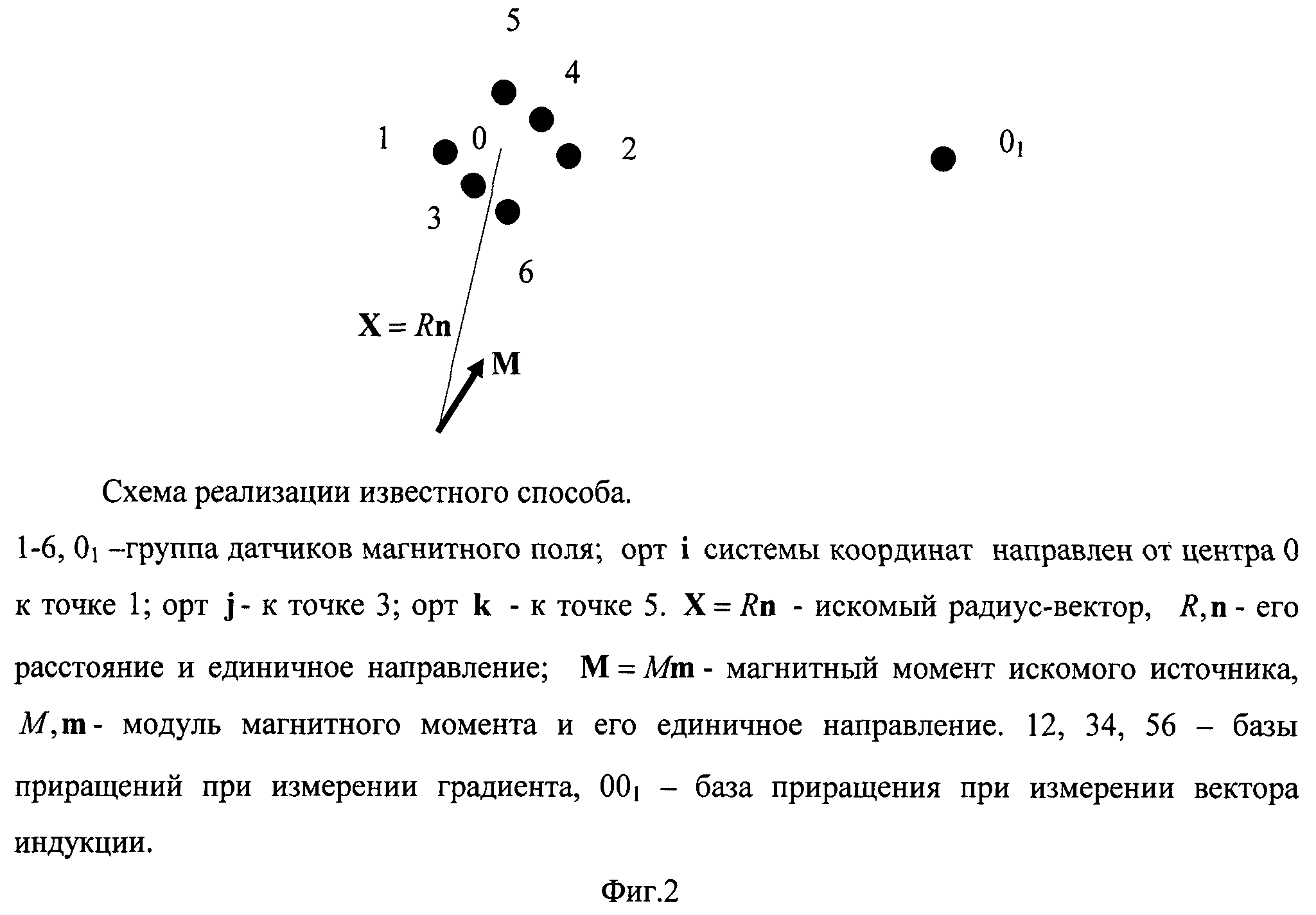
На Фиг.2 изображена схема реализации известного способа.
На Фиг.1 изображена система 7 жестко связанных трехкомпонентных или модульных датчиков магнитного поля В1,В2, В3, В4, В5, В6, В0, предназначенных для измерения 6 приращений индукции магнитного поля В10, В20, В30, В40, В50, В60 относительно центра системы координат 0, в которой размещен опорный датчик В0.
На Фиг.2 изображены 7 конструктивно жестко связанных трехкомпонентных датчиков магнитного поля, предназначенных для измерения 6 приращений индукции магнитного поля относительно опорного датчика, размещенного в удаленной точке 01. Разности пар  ;
;  ;
;  служат для организации измерения градиента индукции магнитного поля в точке 0. Среднее
служат для организации измерения градиента индукции магнитного поля в точке 0. Среднее  служит для измерения приращения индукции магнитного поля между точками 0 и 01.
служит для измерения приращения индукции магнитного поля между точками 0 и 01.
Заявляемый способ действует следующим образом. Измеряют расстояния между точками 1 и 0, 2 и 0, 3 и 0, 4 и 0, 5 и 0, 6 и 0 и выражают каждое из 6 приращений дипольной индукции через измеренное (известное) расстояние между соответствующими точками и неизвестный радиус-вектор X, и неизвестный магнитный момент М f1(X, M)…f6(X, M) измеряют (синхронно) все приращения В10…В60 и составляют систему нелинейных уравнений В10=f1(X, M)…B60=f6(Х, М), которую решают одним из численных методов, для которых в пакете МАТЛАБ составлены универсальные программы, например методом наименьших квадратов.
Таким образом, заявляемый способ основан на измерении приращения (разности) в строгом смысле этого слова и не содержит операций явного решения, связанных с измерением градиента, что характерно для известного способа. (Градиент - понятие точечное, приращение - двуточечное). В известном способе нельзя увеличивать базы 1 и 2…5 и 6, так как градиент по определению требует малую базу (в пределе стремящуюся к нулю), но базу 001 увеличивать необходимо для повышения размера приращения  . Последнее снижает компактность системы датчиков известного способа.
. Последнее снижает компактность системы датчиков известного способа.
Поскольку заявляемый способ основан на измерениях приращений индукции в строгом смысле, он позволяет оптимизировать базы, выбирать их малыми, средними или большими, одинаковыми или разными, в зависимости от конструктивных особенностей носителя системы датчиков, либо оптимизировать базы из условия обеспечения максимальной точности при том или другом расстоянии локализации магнитного источника.
Заявляемый способ проверен (в сравнении с известным) с помощью компьютерного моделирования локализации с оценкой граничной (при доверительной вероятности 0.997) погрешности локализации (средней на компоненту)

где σх - СКО локализации; Δх - оценка погрешности среднего.
Оценки (5) рассчитаны для заявляемого и известного метода при освоенном уровне СКО компонентных датчиков в режиме измерения приращений
[Семевский и др. 2002], для модульных датчиков  при локализации двух типов объекта. Результаты расчета представлены в таблицах 1 и 2. В правых столбцах таблиц указаны предельные расстояния локализации Rпр.
при локализации двух типов объекта. Результаты расчета представлены в таблицах 1 и 2. В правых столбцах таблиц указаны предельные расстояния локализации Rпр.
|
|
Отметим, что время счета одного цикла локализации по заявляемому способу лежит в пределах 0.1-2 с.
Как видно из таблиц, с повышением расстояния (за счет роста Х(2) или Х(3)) оценки погрешностей нарастают лавинообразно. Предельные расстояния Rпр определены как расстояния, при которых соответствующие оценки погрешности достигают половины соответствующего значения Х(2) или Х(3).
Приведенные в табл.1 и 2 данные позволяют сделать главный вывод: заявляемый способ лучше известного по точности и дальности локализации даже при меньшей базе, не говоря уже о равной или большей базах.
Особенность заявляемого способа, в отличие от известного, заключается в том, что его точность и дальность улучшается с повышением размера базы.
Сравним особенности локализации с помощью трехкомпонентных и модульных датчиков. Особенность модульных датчиков состоит в том, что они точнее, но менее информативны, чем трехкомпонентные, так как являются по сути однокомпонентными приборами. Поэтому локализация с помощью модульных датчиков зависит от измерительной ситуации, то есть от расположения локализуемого объекта и от ориентации его магнитного момента. Для них эта ситуация может оказаться благоприятной или неблагоприятной. Например, условия табл.1 оказались благоприятными и модульные датчики на расстояниях более 200 м дали лучшие результаты, чем трехкомпонентные, а условия табл.2 оказались неблагоприятными и модульные датчики уступили трехкомпонентным на всех расстояниях. Отметим также, что на 200 м (см. табл.1) модульные датчики даже при благоприятной ситуации проигрывают по точности локализации трехкомпонентным. (Трехкомпонентные датчики почти не зависят от измерительной ситуации).
В заключение добавим, что локализация также возможна, если использовать не 6 приращений (см. Фиг.2), а меньше 5…2 (любых трехкомпонентных) приращений, но тогда снижаются точность и дальность локализации и появляется заметная зависимость точности от измерительной ситуации.
Способ локализации источника магнитного поля дипольной модели, включающий одновременные измерения приращений индукции магнитного поля между опорной точкой и точкой на каждой полуоси системы координат, а также измерение расстояний между точками и определение по результатам измерений искомых радиус-вектора до источника и его магнитного момента, отличающийсятем, что опорную точку совмещают с центром системы координат, размер базы каждого приращения повышают до конструктивно удобного предела, при этом все искомые величины определяют численно без обращения к измерениям градиента.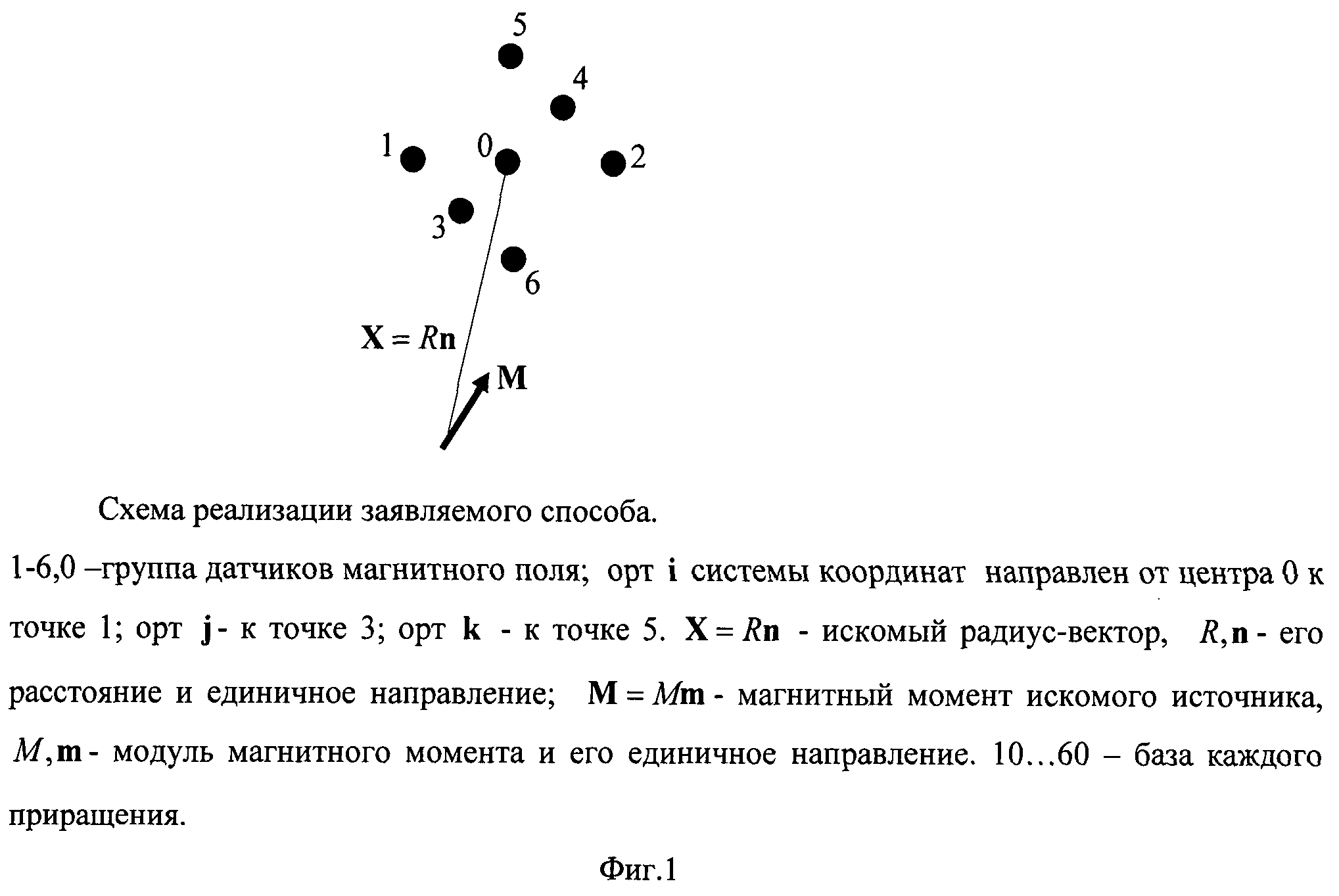
Способ раздельного измерения индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела удлиненной формы
Способ определения корректирующей матрицы трехкомпонентного магнитометра
Способ измерения магнитного момента крупногабаритного тела удлиненной формы
Способ измерения плоского угла и устройство для его реализации
Способ локализации магнитного диполя
Способ калибровки трехкомпонентного магнитометра
Способ защиты от вибрации и устройство для его осуществления
Способ измерения магнитного момента тела удлиненной формы
Способ раздельного измерения индуктивного и постоянного магнитных моментов крупногабаритного ферромагнитного тела удлиненной формы
Устройство для изготовления тонкосводных баллиститных пороховых трубок
Способ изготовления тонкосводных пороховых трубок
Экструдер для переработки баллиститных порохов и топлив
Способ измерения магнитного момента крупногабаритного тела удлиненной формы
Способ измерения плоского угла и устройство для его реализации
Способ изготовления заготовки заряда баллиститного твердого ракетного топлива и устройство для его осуществления

