Результат интеллектуальной деятельности: СПОСОБ СТЫКОВКИ КОСМИЧЕСКИХ АППАРАТОВ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике и может быть использовано для стыковки космических аппаратов (КА), например, при уводе отработавших отделяющихся частей (ОЧ) последних ступеней ракет космического назначения (РКН) с орбит выведения на орбиты спуска.
Известны и широко отработаны способы стыковки КА на орбите и устройства для их осуществления, например система «Игла», андрогинные системы «Курс», «Курс-ММ». При всех этих способах стыковка осуществляется после совмещения плоскости орбит стыкуемых аппаратов и выравнивания их относительных скоростей. Завершающим этапом является мягкая стыковка, касание, захват с фиксацией узлами стыковки и последующим стягиванием КА, например, патент RU №2131829, B64G 1/00 от 23.02.1998.
Недостатком известного способа является ограниченность его применения только для условий штатной ситуации, при которой требуется обязательное совмещение плоскостей движения стыкуемых космических аппаратов и выравнивание их относительных скоростей.
Наиболее близким по сути является техническое решение по патенту RU №2430861 B64G 1/64 от 04.03. 2010 «Способ стыковки космических аппаратов и устройство для его реализации».
Способ заключается в следующем. Перед стыковкой с пассивного КА (ПКА) выпускают на тросе устройство зацепления, например, надувную мишень с высокопрочной сеткой и световой сигнализацией. С активного КА (АКА) при его сближении с ПКА запускают ракету, связанную с АКА при помощи троса, снабженного энергопоглощающими элементами, наводят ракету в режиме самонаведения на световые сигналы устройства зацепления и после ее попадания и зацепления с этим устройством регулируют натяжение троса, осуществляя его торможение при выпуске. При этом обеспечивают натяжение троса, не превышающее предельного значения. После выпуска троса на всю длину начинают осуществлять раскрытие энергопоглощающих элементов, выполненных на этом тросе (например, в виде складок, зафиксированных разрушаемым креплением). Трос продолжает удлиняться с натяжением, не превышающим предельного значения. При совместном движении КА в связке двигателями АКА устраняют вращение связки вокруг ее центра масс, а после прекращения расхождения КА подтягивают ПКА к АКА с помощью троса и производят стыковку.
Использование этого способа для стыковки с пассивными объектами типа ОЧ орбитальных ступеней РКН затруднено по ряду причин, например:
- установка устройства зацепления на давно выведенную ОЧ представляется труднореализуемой операцией;
- при сматывании троса усилие прилагается не к центру масс ПКА, а к буксировочным узлам, при этом возникают возмущающие моменты, которые могут привести к запутыванию троса;
- проблемы изготовления и эксплуатации троса с энергопоглощающими элементами и т.д.
Техническим результатом предлагаемого решения является расширение возможности стыковки с ПКА (в рассматриваемом случае - это ОЧ орбитальной ступени РКН, а вместо термина «ракета» используется термин «космический микробуксир» (КМБ), более подходящий для данного случая) без установки устройства зацепления и энергопоглощающих элементов троса с максимально допустимой разницей относительных скоростей, упрощающих процесс стыковки.
Достижение указанного технического результата при реализации предлагаемого способа обеспечивают тем, что после создания механической связки (КМБ+ПКА)совмещают продольные оси АКА и связки (КМБ+ПКА) с направлением линии, соединяющей их центры масс, осуществляют стабилизацию углового положения АКА и связки (КМБ+ПКА) в инерциальной системе координат относительно линии, соединяющей их центры масс, с помощью продольных ускорений, развиваемых двигателями АКА и КМБ, осуществляют снижение натяжения троса до минимального, после касания связки (КМБ+ПКА) посадочного места на АКА осуществляют фиксацию связки с помощью системы, установленной на АКА.
Сущность изобретения поясняется чертежами, где:
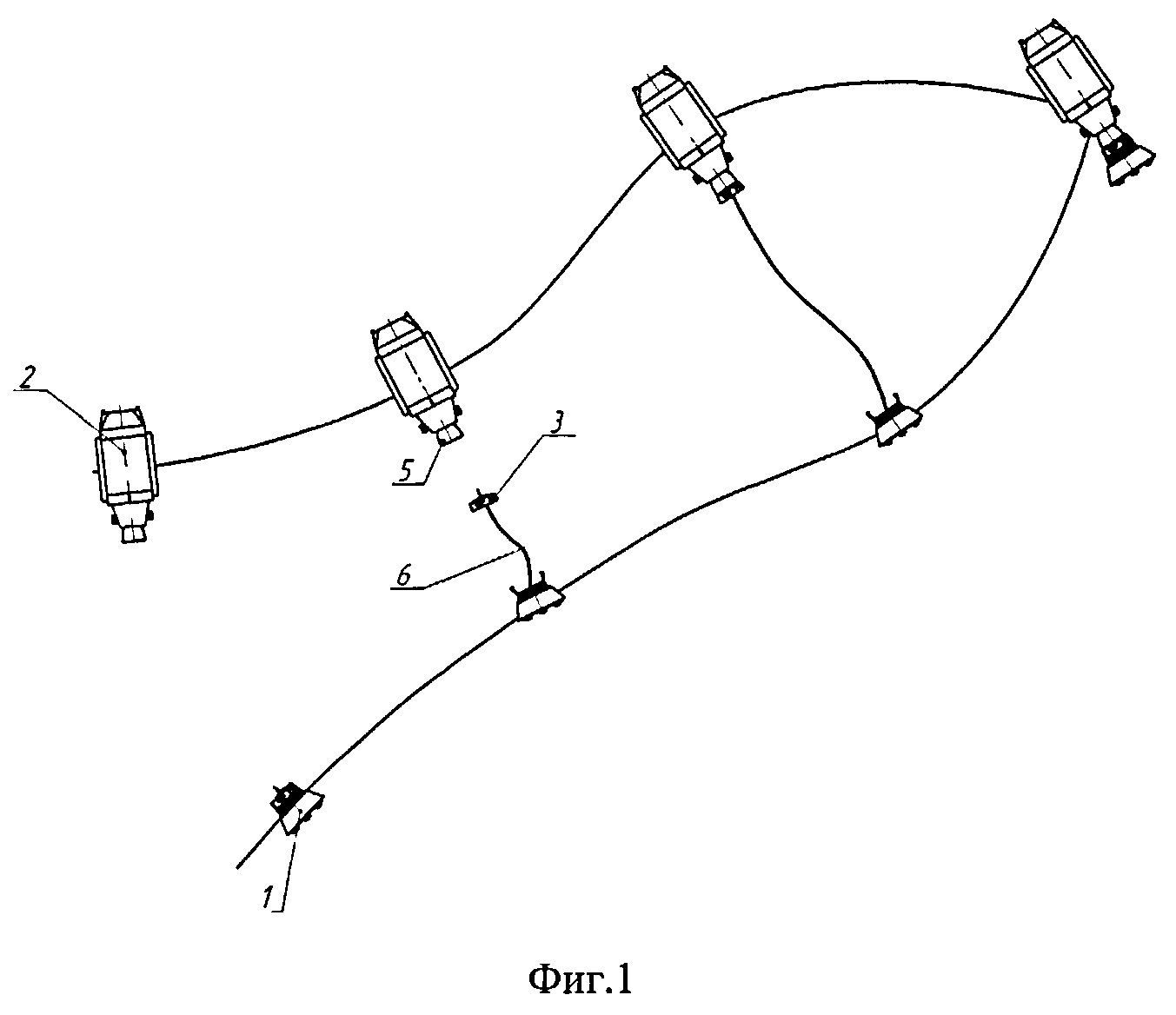
фиг.1 - этапы стыковки АКА и ПКА;
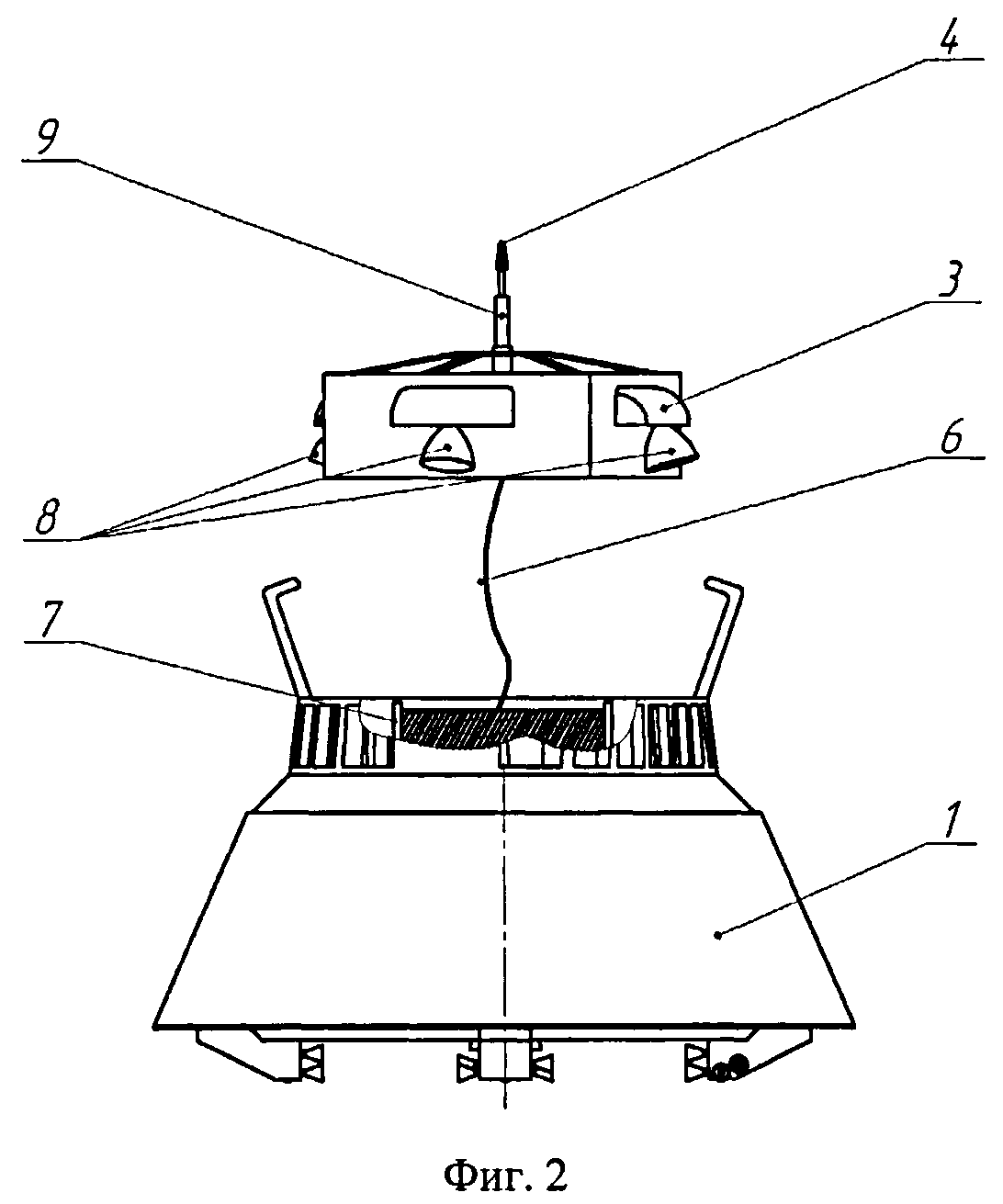
фиг.2 - АКА с КМБ, с телескопическим стыковочным штырем и тросовой системой;
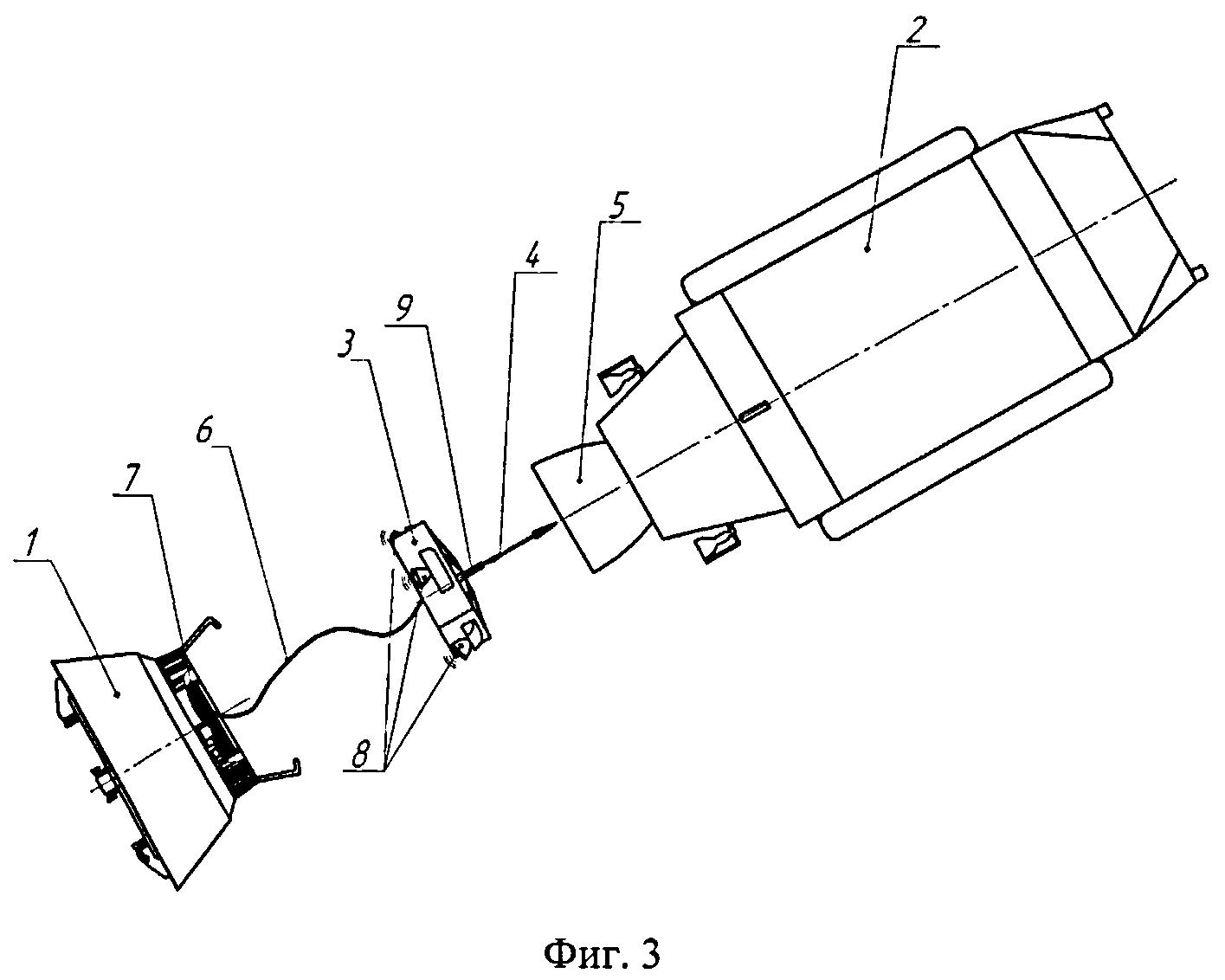
фиг.3 - пуск КМБ с АКА и наведение на ПКА;
фиг.4 - создание связки (КМБ+ПКА);
фиг.5 - сложное движение связки (КМБ+ПКА) и АКА;
фиг.6 - стягивание связки (КМБ+ПКА) и АКА;
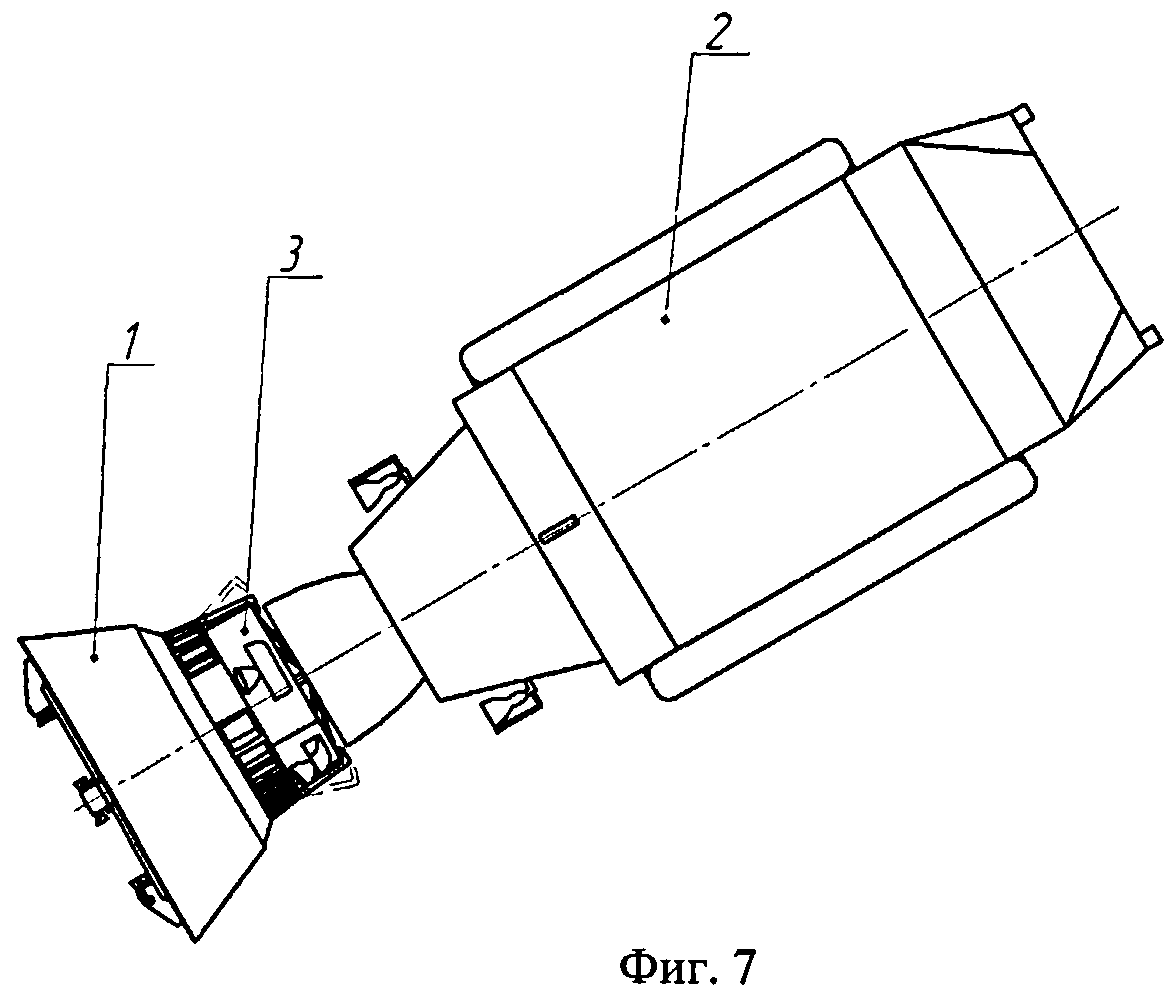
фиг.7 - механическая связка (АКА+КМБ+ПКА).
Реализация предлагаемого технического решения
АКА выводят на орбиту, оптимизированную для стыковки с ПКА, например, по минимуму времени, необходимому для выполнения стыковки, с возможно меньшим расхождением параметров движения КА (обеспечение практически нулевой угловой скорости линии визирования АКА-ПКА на интервале стыковки и стягивания).
При достижении минимального расстояния между АКА и ПКА с АКА выпускают КМБ с головкой самонаведения, который наводят на ПКА, в частности, на сопло ракетного двигателя ОЧ ступени РКН. КМБ прикреплен к тросу, разматываемому с лебедки АКА.
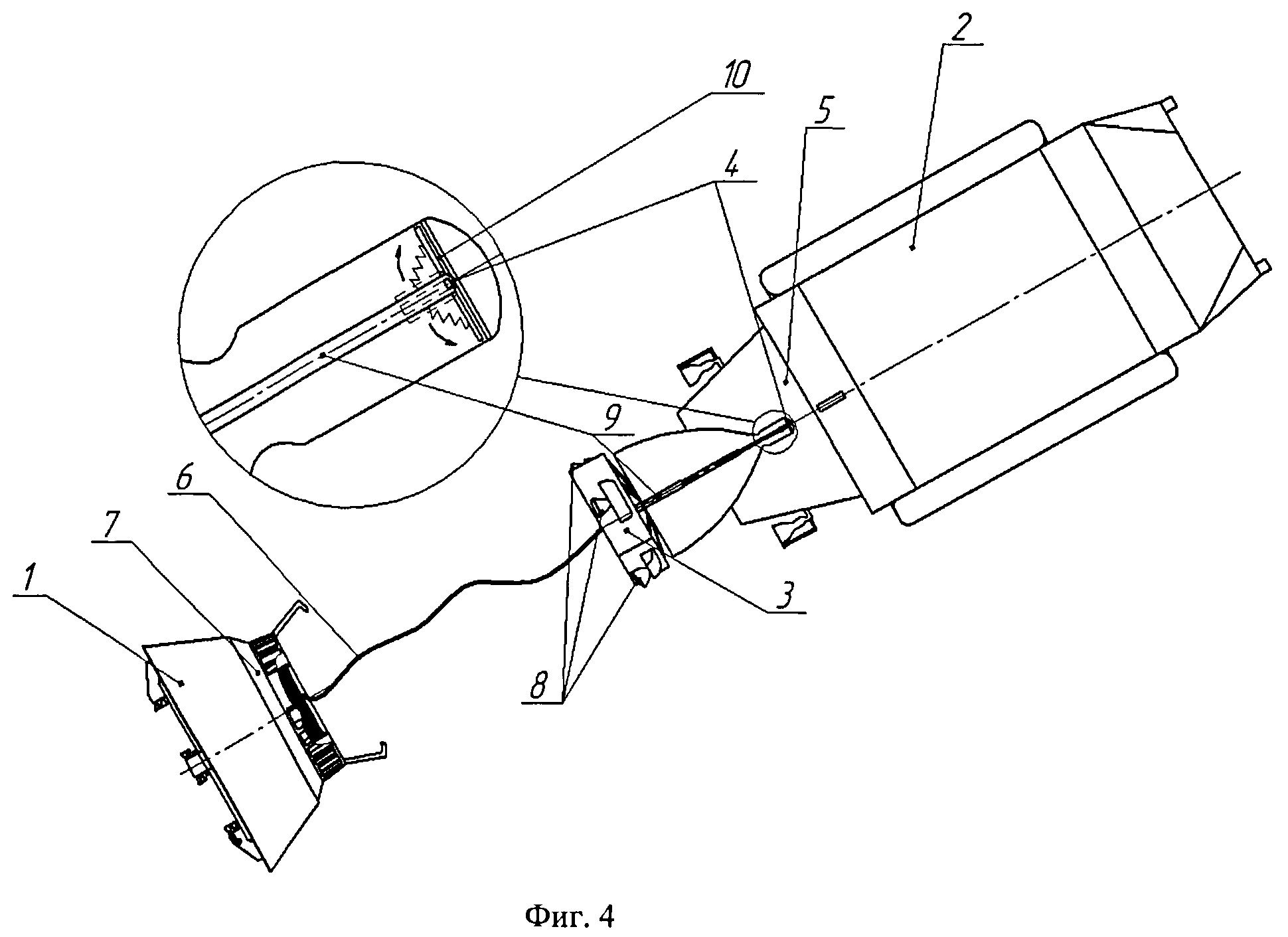
При приближении КМБ к соплу ПКА осуществляют выдвижение штыря на величину свободного хода. После прохождения штырем критического сечения, раскрывают устройство фиксации, а при касании устройством фиксации передней стенки сопла камеры включат устройство, которое начинает втягивать штырь. После касания раскрытым устройством фиксации сужающейся стенки камеры происходит выключение привода. Для обеспечения заданной жесткости соединения системы (ПКА+КМБ) привод отключают при достижении заданного момента.
Таким образом, осуществляется фиксация телескопического штыря в камере сгорания маршевого ракетного двигателя и стягивание ПКА и КМБ, т.е. создание механической связки (ПКА+КМБ).
Демпфирование кинетической энергии соударения при стыковке КМБ и ПКА не рассматривается, т.к. масса КМБ на порядок меньше массы ПКА, а скорости сближения малы (менее 1 м/с), кроме того, гашение таких величин энергий не представляет технических трудностей.
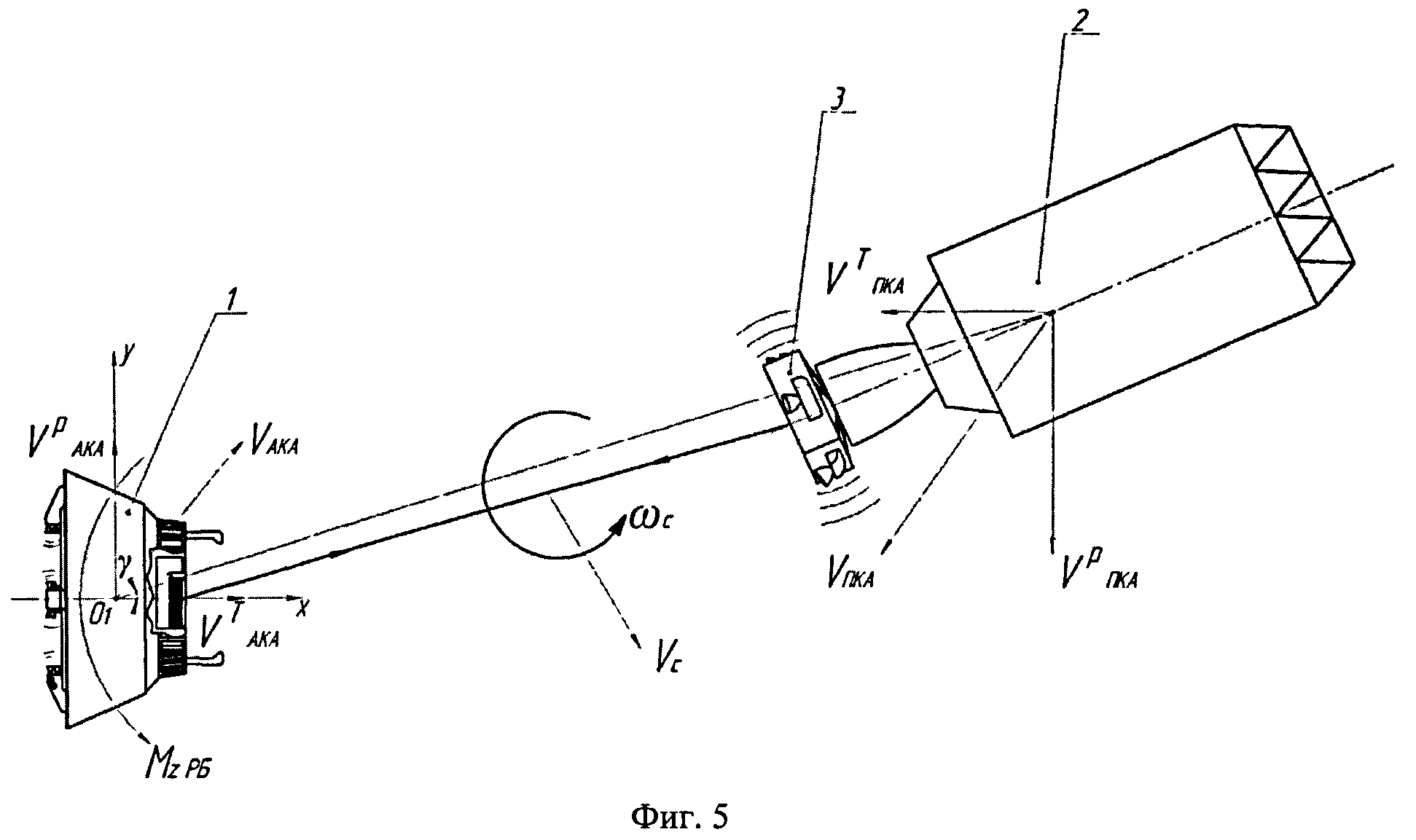
После создания связки (КМБ+ПКА) из-за различия векторов скоростей (центра масс, вокруг центра масс) АКА и ПКА имеет место совместное движение с вращением вокруг суммарного центра масс.
Вся динамическая картина рассматривается в инерциальной системе координат, например, соответствующая моменту времени отделения КМБ от АКА и помещенная в центр масс АКА и совпадающей с его связанной системой координат.
Далее разворачивают продольные оси АКА и связки (КМБ+ПКА) до совмещения их с линией, соединяющей центры масс АКА и связки (КМБ+ПКА), и стабилизируют их в этом положении с использованием двигателей АКА и КМБ.
С помощью продольных ускорений, развиваемых двигателями АКА и КМБ, осуществляют снижение натяжения троса до минимального, после касания связки (КМБ+ПКА) посадочного места на АКА осуществляют фиксацию связки с помощью системы, установленной на АКА.
Двигательные установки АКА и КМБ в системе АКА-трос-КМБ+ПКА играют роль троса с энергопоглощающими элементами в прототипе.
После этого, используя двигатели АКА, уводят связку (АКА+КМБ+ОЧ) в необходимую точку космического пространства или обеспечивают вход в земную атмосферу.
Уровень технологий, обеспечивающих прочность применяемого материала троса, конструкции лебедки АКА, энерговооруженность КМБ, устройств стягивания и фиксации определяет технико-экономические границы применения предлагаемого способа стыковки.
Этапы стыковки АКА и ПКА показаны на фиг.1 (упрощенно).
1) АКА 1 (фиг.2) осуществляет маневрирование с орбиты выведения или с дежурной орбиты для подготовки к стыковке с оптимизацией, например, по критерию минимизации полного времени на операцию стыковки, относительным параметрам движения (минимизация угловой скорости линии визирования АКА-ПКА).
2) С АКА 1 в момент сближения с ПКА 2 на необходимое расстояние выпускают КМБ3 с головкой самонаведения 4, настроенной на параметры среза сопла камеры маршевого двигателя 5 ПКА 2.
КМБ 3 растягивает прикрепленный к ней трос 6, намотанный на лебедку 7 в корпусе АКА 1, с помощью двигательной установки КМБ 8. Механизм лебедки 7 обеспечивает своевременную подачу троса 6 для его раскрутки с регулированием силы натяжения троса 6.
4) Перед подходом к соплу камеры маршевого ракетного двигателя 5 ПКА 2 на КМБ 3 раскрывают телескопический стыковочный штырь 9 с устройством стягивания и устройством фиксации, установленным на наконечнике телескопического стыковочного штыря 9 (фиг.2). Устройство стягивания может быть выполнено, например, на основе винтовой передачи.
5) После попадания стыковочным штырем 9 в камеру маршевого ракетного двигателя 5 ПКА 2, достижения штырем передней стенки камеры сгорания 10 (фиг.4) создают зацепление путем задействования устройства фиксации и стягивания телескопического штыря 9.
На фиг.5 показаны:
ωc - мгновенное угловое вращение вокруг суммарного центра масс АКА и ПКА;
Vc - мгновенная поступательная скорость суммарного центра масс;
VАКА - вектор скорости центра масс АКА;
, - радиальная и тангенциальная составляющих вектора скорости АКА;
Vпка - вектор скорости центра масс ПКА;
, - радиальная и тангенциальная составляющих вектора скорости ПКА.
7) После достижения стабилизации движения связки (КМБ+ПКА) и АКА 1 относительно линий, связывающих их центры масс, осуществляют стягивание АКА 1 и связки (КМБ+ПКА) с помощью лебедки 7, установленной на АКА 1, включая ее электродвигатель в режим наматывания троса 6.
8) При стягивании АКА 1 и связки (КМБ+ПКА) осуществляют контроль параметров движения связки (КМБ+ПКА) и АКА, регулируя натяжение троса электродвигателем лебедки, устраняя превышение натяжения троса с помощью двигателей АКА, КМБ.
9) После формирования связки (АКА+КМБ+ПКА) совершается маневр увода на орбиту утилизации за счет двигательной установки АКА.
10) По достижении параметров движения, соответствующих параметрам перехода на орбиту утилизации, совершается расстыковка и отделение ПКА с помощью многоразовой системы отделения, установленной на КМБ (приведение устройства фиксации, установленного на наконечнике стыковочного штыря, в исходное положение, раскрытие устройств фиксации ПКА на КМБ и включение толкателей для отделения ПКА от КМБ) и маневр (АКА+КМБ) в район следующей цели.
Способ стыковки космических аппаратов (КА), один из которых пассивный (ПКА), а другой, сближающийся с ним - активный (АКА), включающий использование самонаводящегося космического микробуксира (КМБ) для доставки троса, выпускаемого с АКА, и оснащенного стыковочным штырем, при сближении с ПКА на минимальное расстояние, стыковку, стягивание механической связки КМБ+ПКА и АКА с помощью троса, отличающийся тем, что после создания механической связки КМБ+ПКА совмещают продольные оси АКА и связки КМБ+ПКА с направлением линии, соединяющей их центры масс, осуществляют стабилизацию углового положения АКА и связки КМБ+ПКА в инерциальной системе координат с центром, находящимся в центре масс АКА, и с помощью продольных ускорений, развиваемых двигателями АКА и КМБ, осуществляют снижение натяжения троса до минимального, а после касания связки КМБ+ПКА посадочного места на АКА осуществляют фиксацию связки с помощью системы, установленной на АКА.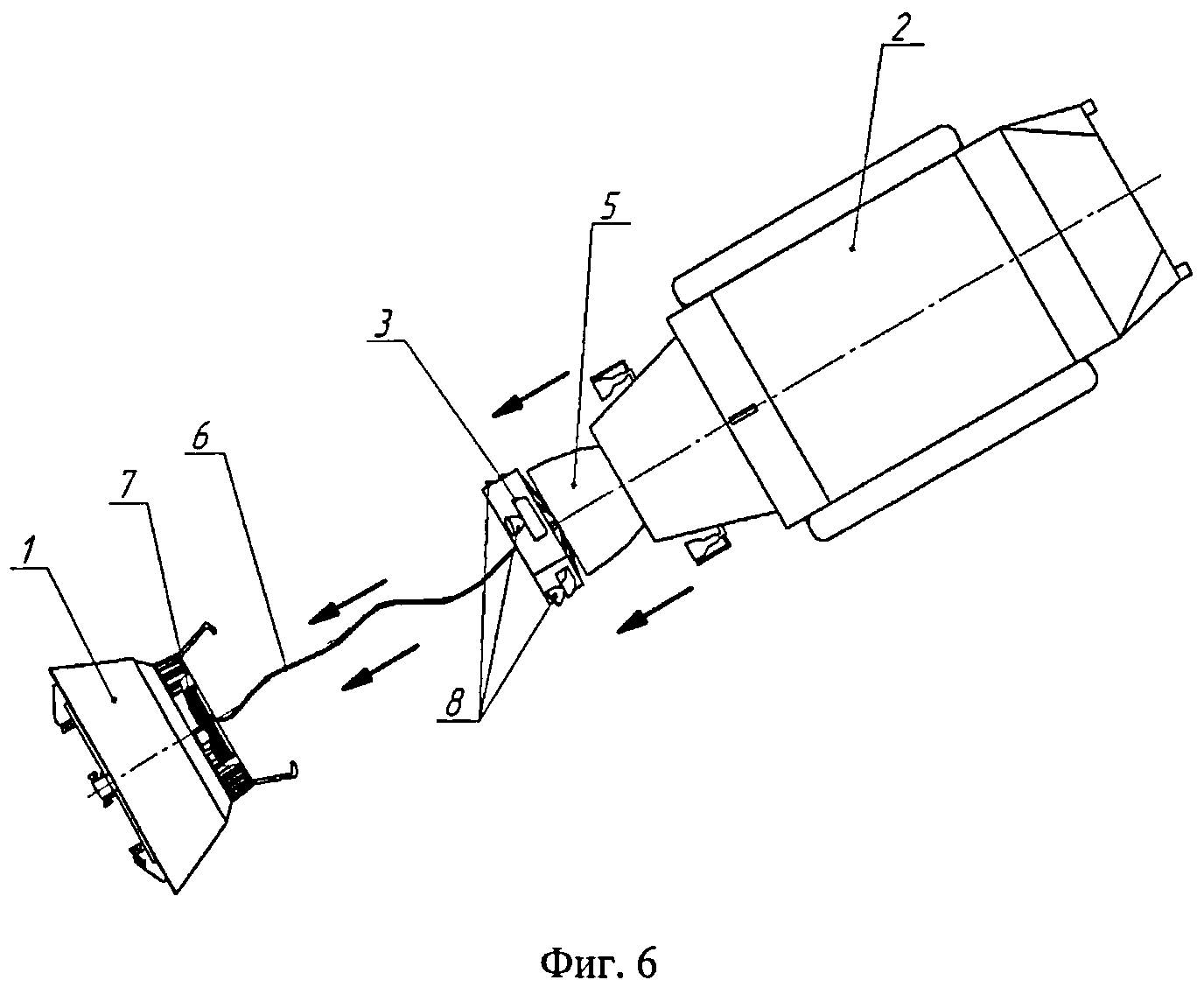
Магнитоэлектрическая машина
Способ минимизации зон отчуждения отделяемых частей ракеты-носителя
Стабилизированный электропривод
Способ изготовления зубчатого колеса
Система датчиков для магнитотеллурического зондирования земли
Свая
Поршневая машина с индивидуальной системой охлаждения цилиндра
Электротермический микродвигатель
Снаряд с газовым подвесом
Поршневая машина с индивидуальным жидкостным охлаждением
Снаряд с газовым подвесом
Магнитоэлектрическая машина
Способ минимизации зон отчуждения отделяемых частей ракеты-носителя
Стабилизированный электропривод
Способ изготовления зубчатого колеса
Система датчиков для магнитотеллурического зондирования земли
Свая
Поршневая машина с индивидуальной системой охлаждения цилиндра
Электротермический микродвигатель
Снаряд с газовым подвесом

