Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ
Вид РИД
Изобретение
Изобретение относится к системам управления движением подводных аппаратов (ПА).
Известно устройство для управления подводным аппаратом, содержащее движители вертикального и горизонтального перемещений, телекамеру, установленную с возможностью поворота, последовательно соединенные датчик угла поворота телекамеры и первый пороговый элемент, последовательно соединенные первый сумматор, первый вход которого подключен к выходу первого источника опорного сигнала, второй пороговый элемент, логический элемент HE и логический элемент ИЛИ, второй вход которого через третий пороговый элемент подключен к выходу первого сумматора, последовательно соединенные синусный функциональный преобразователь, первый блок умножения, первый ключ, второй вход которого подключен к выходу первого порогового элемента, и первый усилитель, выход которого соединен со входом движителя вертикального перемещения, последовательно соединенные косинусный функциональный преобразователь, вход которого подключен ко второму входу первого сумматора, входу синусного функционального преобразователя и выходу датчика угла поворота телекамеры, второй блок умножения, второй ключ, второй вход которого подключен к выходу логического элемента ИЛИ и второй усилитель, выход которого соединен со входом движителя горизонтального перемещения, последовательно соединенные датчик расстояния, третий ключ, четвертый пороговый элемент, четвертый ключ, пятый ключ, второй вход которого подключен к выходу четвертого порогового элемента, и шестой ключ, выход которого подключен ко вторым входам первого и второго блоков умножения, а также датчик команд и последовательно соединенные первый блок деления, первый и второй входы которого подключены соответственно к выходам косинусного функционального преобразователя и второго источника опорного сигнала, второй сумматор и седьмой ключ, второй вход которого соединен с выходом первого блока деления, а третий - со вторым входом второго сумматора и выходом второго блока деления, первый и второй входы которого соединены с выходом третьего источника опорного сигнала и выходом синусного функционального преобразователя, последовательно соединенные третий сумматор, первый вход которого соединен с выходом датчика команд, пятый пороговый элемент и восьмой ключ, второй вход которого подключен к выходу датчика команд, а выход - к третьему входу шестого ключа, причем выход пятого порогового элемента соединен со вторым входом четвертого ключа, последовательно соединенные первый многоуровневый релейный элемент, вход которого подключен к выходу третьего ключа, третий блок умножения и девятый ключ, второй вход которого соединен с выходом седьмого ключа и вторым входом третьего блока умножения, а выход - со вторыми входами третьего сумматора и шестого ключа (патент РФ №2412858. Бюл. №6, 2011).
Недостатком этого устройства является то, что оно позволяет управлять прямолинейным движением ПА к обнаруженному объекту только в вертикальной плоскости. При пространственном движении ПА это прямолинейное движение не обеспечивается.
Известно также устройство для управления подводным аппаратом, содержащее движители вертикального и горизонтального перемещений, телекамеру, установленную с возможностью поворота, последовательно соединенные первый датчик угла поворота телекамеры и первый пороговый элемент, последовательно соединенные первый сумматор, первый вход которого подключен к выходу первого источника опорного сигнала, второй пороговый элемент, логический элемент НЕ и логический элемент ИЛИ, второй вход которого через третий пороговый элемент подключен к выходу первого сумматора, последовательно соединенные первый синусный функциональный преобразователь, первый блок умножения, первый ключ, второй вход которого подключен к выходу первого порогового элемента, и первый усилитель, выход которого соединен со входом движителя вертикального перемещения, второй косинусный функциональный преобразователь, вход которого подключен ко второму входу первого сумматора, входу первого синусного функционального преобразователя и выходу первого датчика угла поворота телекамеры, последовательно соединенные второй блок умножения, второй ключ, второй вход которого подключен к выходу логического элемента ИЛИ, и второй усилитель, выход которого соединен со входом движителя горизонтального перемещения, последовательно соединенные датчик расстояния, третий ключ, четвертый пороговый элемент, четвертый ключ, пятый ключ, второй вход которого подключен к выходу четвертого порогового элемента, и шестой ключ, выход которого подключен ко вторым входам первого и второго блоков умножения, а также датчик команд и последовательно соединенные второй источник опорного сигнала и первый блок деления, последовательно соединенные второй сумматор и седьмой ключ, а также второй блок деления, первый и второй входы которого соединены соответственно с выходами третьего источника опорного сигнала и первого синусного функционального преобразователя, последовательно соединенные третий сумматор, пятый пороговый элемент и восьмой ключ, второй вход которого подключен к выходу датчика команд и первому входу третьего сумматора, а выход - к третьему входу шестого ключа, причем выход пятого порогового элемента соединен со вторым входом четвертого ключа, последовательно соединенные первый многоуровневый релейный элемент, вход которого подключен к выходу третьего ключа, третий блок умножения и девятый ключ, выход которого подключен к вторым входам третьего сумматора и шестого ключа, последовательно соединенные второй датчик угла поворота телекамеры, третий косинусный функциональный преобразователь и четвертый блок умножения, выход которого подключен ко второму входу первого блока деления и первому входу второго блока умножения, последовательно соединенные четвертый синусный функциональный преобразователь, вход которого подключен к выходу второго датчика угла поворота телекамеры, пятый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя и второму входу четвертого блока умножения, шестой блок умножения, второй вход которого подключен к выходу шестого ключа, третий усилитель и движитель поперечного перемещения, а также последовательно соединенные четвертый источник опорного сигнала, третий блок деления, второй вход которого подключен к выходу пятого блока умножения, первый блок взятия модуля, четвертый сумматор и десятый ключ, второй вход которого подключен к входу первого блока взятия модуля, третий - к выходу седьмого ключа и к второму входу четвертого сумматора, а выход - ко вторым входам третьего блока умножения и девятого ключа, причем первый вход второго сумматора подключен ко второму входу седьмого ключа и через второй блок взятия модуля - к выходу первого блока деления, а второй вход - к третьему входу седьмого ключа и через третий блок взятия модуля - к выходу второго блока деления (патент РФ №2465168. Бюл. №30, 2012).
Данное устройство по своей технической сущности является наиболее близким к предлагаемому решению. Недостатком этого устройства является то, что оно обеспечивает качественное управление ПА только при использовании движителей со специальными винтами, обеспечивающими одинаковые тяги независимо от направления их вращения. Но такие винты не являются эффективными при реализации основных (превалирующих) движений ПА.
Технической задачей, на решение которой направлено заявляемое техническое решение, является устранение указанного выше недостатка. То есть обеспечение качественного (точного) движения ПА к обнаруженному объекту в пространстве независимо от направления вращения любых типов винтов, используемых в движителях ПА.
Технический результат, который может быть получен при реализации заявляемого решения, выражается в автоматическом выборе требуемой скорости вращения движителей ПА с учетом направлений этих вращений, при которых ни один из движителей не входит в режим насыщения (независимо от направления их вращения).
Поставленная задача решается тем, что в устройство для управления подводным аппаратом, содержащее движители вертикального и горизонтального перемещений, телекамеру, установленную с возможностью поворота, первый датчик угла поворота телекамеры и первый пороговый элемент, последовательно соединенные первый сумматор, первый вход которого подключен к выходу первого источника опорного сигнала, второй пороговый элемент, логический элемент НЕ и логический элемент ИЛИ, второй вход которого через третий пороговый элемент подключен к выходу первого сумматора, последовательно соединенные первый синусный функциональный преобразователь, первый блок умножения, первый ключ, второй вход которого подключен к выходу первого порогового элемента, а также первый усилитель, выход которого соединен со входом движителя вертикального перемещения, и второй косинусный функциональный преобразователь, вход которого подключен ко входу первого синусного функционального преобразователя и выходу первого датчика угла поворота телекамеры, последовательно соединенные второй блок умножения и второй ключ, второй вход которого подключен к выходу логического элемента ИЛИ, а также второй усилитель, выход которого соединен со входом движителя горизонтального перемещения, последовательно соединенные датчик расстояния, третий ключ, четвертый пороговый элемент, четвертый ключ, пятый ключ, второй вход которого подключен к выходу четвертого порогового элемента, и шестой ключ, выход которого подключен ко вторым входам первого и второго блоков умножения, а также датчик команд, второй источник опорного сигнала и первый блок деления, последовательно соединенные второй сумматор и седьмой ключ, а также второй блок деления, первый вход которого соединен с выходом первого синусного функционального преобразователя, и третий источник опорного сигнала, последовательно соединенные третий сумматор, пятый пороговый элемент и восьмой ключ, второй вход которого подключен к выходу датчика команд и первому входу третьего сумматора, а выход - к третьему входу шестого ключа, причем выход пятого порогового элемента соединен со вторым входом четвертого ключа, последовательно соединенные первый многоуровневый релейный элемент, вход которого подключен к выходу третьего ключа, третий блок умножения и девятый ключ, выход которого подключен к вторым входам третьего сумматора и шестого ключа, последовательно соединенные второй датчик угла поворота телекамеры, третий косинусный функциональный преобразователь и четвертый блок умножения, выход которого подключен к первому входу первого блока деления и первому входу второго блока умножения, последовательно соединенные четвертый синусный функциональный преобразователь, вход которого подключен к выходу второго датчика угла поворота телекамеры, пятый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя и второму входу четвертого блока умножения, и шестой блок умножения, второй вход которого подключен к выходу шестого ключа, а также третий усилитель, подключенный ко входу движителя поперечного перемещения, четвертый источник опорного сигнала и последовательно соединенные третий блок деления, первый вход которого подключен к выходу пятого блока умножения, первый блок взятия модуля, четвертый сумматор и десятый ключ, второй вход которого подключен к входу первого блока взятия модуля, третий - к выходу седьмого ключа и к второму входу четвертого сумматора, а выход - ко вторым входам третьего блока умножения и девятого ключа, причем первый вход второго сумматора подключен ко второму входу седьмого ключа и через второй блок взятия модуля - к выходу первого блока деления, а второй вход - к третьему входу седьмого ключа и через третий блок взятия модуля - к выходу второго блока деления, дополнительно вводятся последовательно соединенные одиннадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу первого ключа, и пятый сумматор, второй вход которого подключен ко второму выходу одиннадцатого ключа, а выход - ко входу первого усилителя, последовательно соединенные двенадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу второго ключа, и шестой сумматор, второй вход которого подключен ко второму выходу двенадцатого ключа, а выход - ко входу второго усилителя, последовательно соединенные тринадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу шестого блока умножения, и седьмой сумматор, второй вход которого подключен ко второму выходу тринадцатого ключа, а выход - ко входу третьего усилителя, четвертый блок взятия модуля, вход которого подключен к выходу первого датчика угла поворота телекамеры и входу первого порогового элемента, а выход - к второму входу первого сумматора, последовательно соединенные пятый источник опорного сигнала и четырнадцатый ключ, второй сигнальный вход которого подключен к выходу второго источника опорного сигнала, третий управляющий вход - к выходу четвертого блока умножения, а выход - ко второму входу первого блока деления, последовательно соединенные шестой источник опорного сигнала и пятнадцатый ключ, второй сигнальный вход которого подключен к выходу четвертого источника опорного сигнала, третий управляющий вход - к выходу пятого блока умножения, а выход - ко второму входу третьего блока деления, а также последовательно соединенные седьмой источник опорного сигнала и шестнадцатый ключ, второй сигнальный вход которого подключен к выходу третьего источника опорного сигнала, третий управляющий вход - к выходу первого синусного функционального преобразователя, а выход - ко второму входу второго блока деления.
Сопоставительный анализ заявляемого технического решения с его аналогом и прототипом свидетельствует о его соответствии критерию «Новизна».
Заявленная совокупность признаков, приведенная в отличительной части формулы изобретения, позволяет автоматически корректировать скорость вращения движителей ПА с учетом направлений этих вращений и при этом предотвращать их вхождение в насыщение независимо от направления этих вращений.
На фиг.1 представлена функциональная схема устройства для управления подводным аппаратом.
Устройство для управления подводным аппаратом содержит движители вертикального 1 и горизонтального 2 перемещений, телекамеру 3, установленную с возможностью поворота, первый датчик 4 угла поворота телекамеры 3 и первый пороговый элемент 5, последовательно соединенные первый сумматор 6, первый вход которого подключен к выходу первого источника 7 опорного сигнала, второй пороговый элемент 8, логический элемент 9 НЕ и логический элемент 10 ИЛИ, второй вход которого через третий пороговый элемент 11 подключен к выходу первого сумматора 6, последовательно соединенные первый синусный функциональный преобразователь 12, первый блок 13 умножения, первый ключ 14, второй вход которого подключен к выходу первого порогового элемента 5, а также первый усилитель 15, выход которого соединен со входом движителя 1 вертикального перемещения, и второй косинусный функциональный преобразователь 16, вход которого подключен ко входу первого синусного функционального преобразователя 12 и выходу первого датчика 4 угла поворота телекамеры 3, последовательно соединенные второй блок 17 умножения и второй ключ 18, второй вход которого подключен к выходу логического элемента 10 ИЛИ, а также второй усилитель 19, выход которого соединен со входом движителя 2 горизонтального перемещения, последовательно соединенные датчик 20 расстояния, третий ключ 21, четвертый пороговый элемент 22, четвертый ключ 23, пятый ключ 24, второй вход которого подключен к выходу четвертого порогового элемента 22, и шестой ключ 25, выход которого подключен ко вторым входам первого 13 и второго 17 блоков умножения, а также датчик 26 команд, второй источник 27 опорного сигнала и первый блок 28 деления, последовательно соединенные второй сумматор 29 и седьмой ключ 30, а также второй блок 31 деления, первый вход которого соединен с выходом первого синусного функционального преобразователя 12, и третий источник 32 опорного сигнала, последовательно соединенные третий сумматор 33, пятый пороговый элемент 34 и восьмой ключ 35, второй вход которого подключен к выходу датчика 26 команд и первому входу третьего сумматора 33, а выход - к третьему входу шестого ключа 25, причем выход пятого порогового элемента 34 соединен со вторым входом четвертого ключа 23, последовательно соединенные первый многоуровневый релейный элемент 36, вход которого подключен к выходу третьего ключа 21, третий блок 37 умножения и девятый ключ 38, выход которого подключен к вторым входам третьего сумматора 33 и шестого ключа 25, последовательно соединенные второй датчик 39 угла поворота телекамеры 3, третий косинусный функциональный преобразователь 40 и четвертый блок 41 умножения, выход которого подключен к первому входу первого блока 28 деления и первому входу второго блока 17 умножения, последовательно соединенные четвертый синусный функциональный преобразователь 42, вход которого подключен к выходу второго датчика 39 угла поворота телекамеры 3, пятый блок 43 умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя 16 и второму входу четвертого блока 41 умножения, и шестой блок 44 умножения, второй вход которого подключен к выходу шестого ключа 25, а также третий усилитель 45, подключенный ко входу движителя 46 поперечного перемещения, четвертый источник 47 опорного сигнала и последовательно соединенные третий блок 48 деления, первый вход которого подключен к выходу пятого блока 43 умножения, первый блок 49 взятия модуля, четвертый сумматор 50 и десятый ключ 51, второй вход которого подключен к входу первого блока 49 взятия модуля, третий - к выходу седьмого ключа 30 и к второму входу четвертого сумматора 50, а выход - ко вторым входам третьего блока 37 умножения и девятого ключа 38, причем первый вход второго сумматора 29 подключен ко второму входу седьмого ключа 30 и через второй блок 52 взятия модуля - к выходу первого блока 28 деления, а второй вход - к третьему входу седьмого ключа 30 и через третий блок 53 взятия модуля - к выходу второго блока 31 деления, последовательно соединенные одиннадцатый ключ 54, первый сигнальный и второй управляющий входы которого подключены к выходу первого ключа 14, и пятый сумматор 55, второй вход которого подключен ко второму выходу одиннадцатого ключа 54, а выход - ко входу первого усилителя 15, последовательно соединенные двенадцатый ключ 56, первый сигнальный и второй управляющий входы которого подключены к выходу второго ключа 18, и шестой сумматор 57, второй вход которого подключен ко второму выходу двенадцатого ключа 56, а выход - ко входу второго усилителя 19, последовательно соединенные тринадцатый ключ 58, первый сигнальный и второй управляющий входы которого подключены к выходу шестого блока 44 умножения, и седьмой сумматор 59, второй вход которого подключен ко второму выходу тринадцатого ключа 58, а выход - ко входу третьего усилителя 45, четвертый блок 60 взятия модуля, вход которого подключен к выходу первого датчика 4 угла поворота телекамеры и входу первого порогового элемента 5, а выход - к второму входу первого сумматора 6, последовательно соединенные пятый источник 61 опорного сигнала и четырнадцатый ключ 62, второй сигнальный вход которого подключен к выходу второго источника 27 опорного сигнала, третий управляющий вход - к выходу четвертого блока 41 умножения, а выход ко второму входу первого блока 28 деления, последовательно соединенные шестой источник 63 опорного сигнала и пятнадцатый ключ 64, второй сигнальный вход которого подключен к выходу четвертого источника 47 опорного сигнала, третий управляющий вход - к выходу пятого блока 43 умножения, а выход - ко второму входу третьего блока 48 деления, а также последовательно соединенные седьмой источник 65 опорного сигнала и шестнадцатый ключ 66, второй сигнальный вход которого подключен к выходу третьего источника 32 опорного сигнала, третий управляющий вход - к выходу первого синусного функционального преобразователя 12, а выход - ко второму входу второго блока 31 деления. 67 - обнаруженный объект.
Главной задачей устройства для управления ПА является обеспечение минимального времени его подхода к объекту 67 в пространстве без столкновения с ним и с другими объектами. Исходя из этой задачи целесообразно сохранять его прямолинейное движение к объекту с максимально возможной скоростью.
Предложенное устройство работает следующим образом.
Датчик 4 измеряет текущий угол поворота телекамеры 3 в вертикальной плоскости относительно горизонтальной плоскости (угол α), в которой расположены оси X и Y (где ось X совпадает с продольной осью ПА), а датчик 39 - угол поворота этой телекамеры относительно вертикальной оси Z (угол β). В результате однозначно определяется направление прямолинейного движения ПА к объекту 67 в пространстве вдоль текущего направления оптической оси телекамеры 3. При этом вдоль оси Z он должен перемещаться на расстояние, пропорциональное sinα, вдоль оси X - пропорционально cosαcosβ, а вдоль поперечной оси Y - пропорционально cosαsinβ. Т.е. движители 1, 2 и 46 должны создавать тяги, пропорциональные sinα, cosαcosβ и cosαsinβ соответственно. Если используются одинаковые винтовые движители, то скорости вращения их винтов также должны быть пропорциональны sinα, cosαcosβ и cosαsinβ соответственно, но с учетом направления их вращения, поскольку величины тяг этих движителей с учетом конструктивных особенностей типовых винтов имеют различную пропорциональную зависимость от скорости их вращения в зависимости от направления этого вращения.
Функциональные зависимости sinα и cosα формируются на выходах функциональных преобразователей 12 и 16, а функциональные зависимости sinβ и cosβ - на выходах функциональных преобразователей 42 и 40 соответственно. В результате на выходах блоков 13, 17 и 44 формируются сигналы Uysinα, Uycosβ и Uycosβ и Uycosαsinβ соответственно. Причем сигнал Uy определяет скорость перемещения ПА по прямолинейной траектории к объекту 67. Он формируется или автоматически, или оператором с помощью датчика 26 команд, который представляет собой рукоятку с потенциометром или просто потенциометр любого типа.
Если ключи 14 и 18 замкнуты, а сигналы Uysinα, Uycosαcosβ и Uycosαsinβ, поступающие соответственно на первые сигнальные и вторые управляющие входы ключей 54, 56 и 58, положительны, то вторые управляющие входы ключей 54, 56 и 58 обеспечивают соединение их первых выходов с первыми положительными входами сумматоров 55, 57, 59, имеющими единичные коэффициенты усиления. Если же некоторые из этих сигналов отрицательны, то, поступив на вторые управляющие входы соответствующих ключей 54, 56 и 58, они обеспечивают соединение их вторых выходов со вторыми положительными входами сумматоров 55, 57, 59, имеющими коэффициенты усиления K1i соответственно, где i=55, 57, 59. В результате на выходах сумматоров 55, 57 и 59 формируются сигналы KUysinα, KUycosαcosβ, KUycosαsinβ соответственно, где K принимают или единичное значение, если соответствующий движитель ПА вращается в одну сторону, или K=K1i, если движитель i вращается в противоположную сторону. Введение коэффициента K необходимо, поскольку типовые винты движителей ПА имеют разные тяги при одной и той же скорости их вращения, но в противоположные стороны. Причем конкретный K1i может быть больше или меньше единицы в зависимости от особенностей конструкции винта конкретного движителя.
В результате на движители 1, 2 и 46 будут поступать сигналы UB=KKBUysinα, UГ=KKГUycosαcosβ, UП=KKПUycosαsinβ, где КВ, КГ, КП - коэффициенты усиления усилителей 15, 19 и 45 соответственно, которые выбираются в зависимости от гидродинамических свойств ПА. При этом величины K1i подбираются с учетом соответствующих величин КВ, КГ, КП. Создаваемые движителями 1, 2 и 46 тяги пропорциональны величинам подаваемых на них сигналов UB, UГ и UП, которые имеют ограничения. Эти тяги должны обеспечивать прямолинейное перемещение ПА к объекту 67 с максимально возможной скоростью.
Предложенное устройство обеспечивает качественное управление ПА и при наличии подводных течений. В этом случае оператор должен постоянно удерживать объект 67 в центре телемонитора, изменяя углы α и β телекамеры. При этом соответствующие движители, уменьшив или увеличив свои тяги, автоматически обеспечивают сближение ПА с объектом 67. Однако если течение значительно (например, встречное течение в горизонтальной плоскости), то ПА при α>0 (α имеет положительное значение при измерении против часовой стрелки от горизонтальной плоскости) прижмется к грунту до момента достижения объекта 67. При наличии неровностей на дне возможны или потеря объекта 67 из виду, или столкновение ПА с этими неровностями. Для устранения подобной ситуации необходимо отключить движитель 1 вертикальной тяги при некотором минимально допустимом значении угла |α|. Отключение движителя 1 обеспечивается с помощью порогового элемента 5 с характеристикой
 ,
,
где U5вых, U5вх - соответственно выходной и входной сигналы этого элемента; U5cp>0 - величина срабатывания элемента 5 (она определяется рельефом дна и свойствами ПА, характером выполняемых работ и др.).
Таким образом, если |α| достигает малого значения, то пороговый элемент 5 размыкает ключ 14, движитель 1 останавливается, а встречное течение отрабатывается только движителем 2. При этом ПА приближается к объекту по горизонтали. Так как телекамера 3 продолжает слежение за этим объектом, а расстояние между ним и ПА сокращается, то через некоторое время значение |α| увеличится, сработает пороговый элемент 5, включая ключ 14, и вновь запустится движитель 1. Это будет продолжаться до подхода ПА к объекту 67.
При попутном течении возникает ситуация, когда ПА может проскочить объект, проходя над ним на некоторой высоте, так как в предлагаемом методе управления ПА в определенный момент сближения с объектом будет находиться в положении, когда угол α будет приближаться к 90°, оставаясь меньше 90°. В этом случае и течение, и движитель 2 способствуют увеличению угла |α|.
Если при приближении угла α к 90° не отключить движитель 2, то ПА проскочит объект 67 на большой скорости и для его возвращения потребуется значительное время и потеря энергии. Для исключения этой ситуации используют источник опорного сигнала 7, вырабатывающий напряжение, равное выходному сигналу датчика положения 4 при |α|=90° и совпадающее с ним по знаку. Пороговые элементы 8 и 11 имеют соответственно характеристики
 ;
;  ,
,
где Uiвых, Uiвх - выходные и входной сигналы соответствующих пороговых элементов (i=8, 11); U8c<0 - значение входного сигнала, при котором срабатывает пороговый элемент 8.
Выходные сигналы элементов НЕ 9 и ИЛИ 10 определяются соотношениями  ,
,  .
.
В результате движитель 2 будет всегда останавливаться при выполнении условия U8c≤U8вх≤0 до того, как ПА проскочит объект 67. Последнее следует из того, что элементы 8-10 с помощью ключа 18 размыкают цепь питания движителя 2 при приближении |α| к 90°. Величина U8c определяется заранее и зависит от скорости течения, гидродинамических свойств ПА, характера выполняемых работ и т.п.
После отключения движителя 2 движение к объекту 67 происходит только под действием движителя 1 по вертикали. Если в процессе сближения ПА с этим объектом угол |α| уменьшается, то ключ 18 вновь замыкается, запуская движитель 2, и ПА опять начинает приближаться к объекту 67 до появления условия U8c≤U8вх≤0.
Если же после остановки движителя 2 течение сместит ПА по горизонтали так, что угол |α| становится больше 90°, то пороговый элемент 11 замыкает ключ 18, но движитель 2 уже создает тягу в противоположную по отношению к течению сторону, не давая ПА сильно проскочить объект 67. Поскольку в данном случае до момента достижения |α| значения 90° движитель 2 отключен, то ПА в момент |α|=90° имеет малую горизонтальную скорость, в основном определяемую величиной попутного горизонтального течения. В результате ПА проскакивает объект 67 с малой скоростью, которая быстро гасится реверсивным включением движителя 2.
Если движитель 2 смещает ПА так, что |α| станет меньше 90°, то опять размыкается цепь питания движителя 2. В данном случае горизонтальная составляющая скорости автоматически гасится уже встречным течением.
Таким же образом рассматриваемое устройство работает и при α<0, когда плавающие объекты или объекты, удерживаемые в толще воды на якорях, находятся над ПА. В этом случае блок 60 взятия модуля ликвидирует отрицательный знак угла а для той части устройства, которая предназначена для обеспечения работы ПА при наличии течений. При этом движение ПА к объекту 67, расположенному над ним, будет обеспечиваться с помощью соответствующих элементов, работа которых не зависит от знака α.
Аналогично описывается работа ПА и при боковом течении, которое направлено встречно или попутно движущемуся ПА. Предположим, что имеет место встречное боковое течение. Тогда при описанном алгоритме управления возникает ситуация, когда по осям Z и X расстояние до объекта 67 будет стремиться к нулю, а по оси Y расстояние будет большим. В результате угол α будет стремиться к нулю, а угол |β| - к 90°. В этой ситуации с помощью порогового элемента 5 произойдет отключение движителя 1. Близок к нулю будет и управляющий сигнал UГ. Оставшееся не пройденным расстояние по оси Y будет уменьшено до нуля движителем 46, на вход которого будет подаваться сигнал UП, имеющий близкую к максимальной составляющую cosαsinβ. Описанная ситуация возникает только при сильном боковом встречном течении. При незначительных течениях движение к объекту 67 будет осуществляться по некоторой плавной криволинейной пространственной траектории.
При попутном боковом течении расстояние до объекта 67 по оси Y может обнулиться несколько раньше, чем по осям X и Z. При этом произойдет изменение знака sinβ, а следовательно, и реверс движителя 46. В результате также будет обеспечен плавный подход ПА к объекту 67.
Очевидно, что чем быстрее ПА будет двигаться к обнаруженному объекту 67 по прямолинейной траектории, тем быстрее он его достигнет. Однако если задаваемая оператором скорость движения ПА и пространственное расположение прямолинейной траектории будут такими, что некоторые из его движителей в силу ограничения своей мощности будут входить в насыщение, то система управления автоматически (независимо от оператора) должна изменять режим движения ПА таким образом, чтобы исключить эти насыщения и тем самым предотвратить сход ПА с заданной траектории и потерю визуального контакта с объектом 67.
Сигналы, поступающие с выходов источников 27, 32 и 47 на вторые сигнальные входы ключей 62, 66, 64 соответственно, равны  ,
,  ,
,  , а с выходов источников 61, 63 и 65 - на первые сигнальные входы этих ключей соответственно, равны
, а с выходов источников 61, 63 и 65 - на первые сигнальные входы этих ключей соответственно, равны  ,
,  ,
,  , где
, где  ,
,  ,
,  - максимально возможные значения входных сигналов движителей 2, 1 и 46 соответственно, при которых еще не наступает их насыщение. Если на третьи управляющие входы ключей 62, 66, 64 поступают положительные сигналы, то эти ключи соединяют выходы источников 27, 32 и 47 соответственно со входами блоков деления 28, 31 и 48. Если же на третьи входы ключей 62, 66, 64 поступают отрицательные сигналы, то эти ключи соединяют выходы источников 61, 65 и 63 соответственно со входами блоков деления 28, 31 и 48. В результате на выходах этих блоков формируются сигналы, соответствующие максимально допустимым значениям управляющих воздействий, при которых движители 2, 1 и 46 еще не входят в насыщение при текущих значениях углов α и β:
- максимально возможные значения входных сигналов движителей 2, 1 и 46 соответственно, при которых еще не наступает их насыщение. Если на третьи управляющие входы ключей 62, 66, 64 поступают положительные сигналы, то эти ключи соединяют выходы источников 27, 32 и 47 соответственно со входами блоков деления 28, 31 и 48. Если же на третьи входы ключей 62, 66, 64 поступают отрицательные сигналы, то эти ключи соединяют выходы источников 61, 65 и 63 соответственно со входами блоков деления 28, 31 и 48. В результате на выходах этих блоков формируются сигналы, соответствующие максимально допустимым значениям управляющих воздействий, при которых движители 2, 1 и 46 еще не входят в насыщение при текущих значениях углов α и β:  ,
,  ,
,  - соответственно при положительных значениях сигналов, поступающих на сигнальные входы ключей 62, 66, 64, и
- соответственно при положительных значениях сигналов, поступающих на сигнальные входы ключей 62, 66, 64, и  ,
,  ,
,  - соответственно при отрицательных значениях сигналов, поступающих на управляющие входы ключей 62, 66, 64. В результате при отсутствии подводных течений для обеспечения прямолинейного перемещения ПА к объекту 67 в качестве управляющего должно быть выбрано минимальное из трех значений
- соответственно при отрицательных значениях сигналов, поступающих на управляющие входы ключей 62, 66, 64. В результате при отсутствии подводных течений для обеспечения прямолинейного перемещения ПА к объекту 67 в качестве управляющего должно быть выбрано минимальное из трех значений  ,
,  или
или  .
.
Поскольку с течением времени расстояние между объектом 67 и ПА уменьшается, а скорость его прямолинейного движения является максимально возможной, то без своевременного уменьшения этой скорости возможно столкновение ПА и объекта даже в случае отключения движителей, т.к. ПА будет продолжать движение к объекту по инерции. Поэтому при достижении расстояния l1 между указанным объектом и ПА скорость последнего должна быть автоматически уменьшена в k1 раз без схода ПА с прямолинейной траектории движения к объекту. Это удается сделать с помощью релейного элемента 36 и блока 37, на выходе которого формируются сигналы  ,
,  или
или  . Если ПА приближается к объекту 67 на расстояние li, то на выходе блока 37 сигнал управления движителями уменьшается до величин
. Если ПА приближается к объекту 67 на расстояние li, то на выходе блока 37 сигнал управления движителями уменьшается до величин  ,
,  или
или  , обеспечивая автоматическое снижение скорости движения ПА по прямолинейной траектории в ki раз.
, обеспечивая автоматическое снижение скорости движения ПА по прямолинейной траектории в ki раз.
На выходе сумматора 29 формируется сигнал, равный  . Если он положителен, то
. Если он положителен, то  . Тогда выход ключа 30 соединяется с выходом блока 53 и на выходе этого ключа появляется сигнал
. Тогда выход ключа 30 соединяется с выходом блока 53 и на выходе этого ключа появляется сигнал  , а на выходе сумматора 50 - сигнал
, а на выходе сумматора 50 - сигнал  . Если этот сигнал положителен, то
. Если этот сигнал положителен, то  . Тогда выход ключа 51 соединяется с выходом блока 53 и на выходе ключа 51, а также на выходе блока 37 и ключей 38, 25 появляется минимальный из трех возможных сигналов:
. Тогда выход ключа 51 соединяется с выходом блока 53 и на выходе ключа 51, а также на выходе блока 37 и ключей 38, 25 появляется минимальный из трех возможных сигналов:  (предельно возможный для движителя 1 при текущем значении углов α и β, если ПА находится на большом расстоянии от объекта 67 и U36вх>ll). В результате на вторые входы блоков умножения 13, 17 и 44 также будет подаваться управляющий сигнал
(предельно возможный для движителя 1 при текущем значении углов α и β, если ПА находится на большом расстоянии от объекта 67 и U36вх>ll). В результате на вторые входы блоков умножения 13, 17 и 44 также будет подаваться управляющий сигнал  .
.
Если же разность  отрицательна, то
отрицательна, то  и на выходе ключей 51, 38 и 25 появится минимальный из текущих сигналов:
и на выходе ключей 51, 38 и 25 появится минимальный из текущих сигналов:  (предельно возможный для движителя 46 при текущем значении углов α и β).
(предельно возможный для движителя 46 при текущем значении углов α и β).
Если сигнал  отрицателен, то
отрицателен, то  и на выходе ключа 30 появится сигнал
и на выходе ключа 30 появится сигнал  , а на выходе сумматора 50 - сигнал
, а на выходе сумматора 50 - сигнал  . Если этот сигнал положителен, то
. Если этот сигнал положителен, то  и на выходе ключей 38, 25 и 51 появится минимальный из трех возможных сигналов:
и на выходе ключей 38, 25 и 51 появится минимальный из трех возможных сигналов:  (предельно возможный для движителя 2 при текущем значении углов α и β), который поступит на вторые входы блоков умножения 13, 17 и 44. Если же при
(предельно возможный для движителя 2 при текущем значении углов α и β), который поступит на вторые входы блоков умножения 13, 17 и 44. Если же при  будет выполняться неравенство
будет выполняться неравенство  , то на вторые входы блоков умножения 13, 17 и 44 будет подан сигнал
.
, то на вторые входы блоков умножения 13, 17 и 44 будет подан сигнал
.
При таком формировании сигнала Uy при отсутствии течений всегда будет обеспечиваться прямолинейное перемещение ПА к объекту 67 на большом расстоянии от него.
Релейный элемент 36 имеет характеристику U36вых=1, если ПА находится на большом расстоянии от объекта 67 и U36вх>11; U36вых=k1<1, если ПА начинает приближаться к этому объекту, l1>U36вых>l2; l1>U36вых=k2<k1, если ПА еще ближе подходит к объекту, и l2>U36вх>l3; U36вых=ki<ki-1, если li>U36вх>li+1 и т.д., где i=1, 2, …, n. Здесь n - любое заданное проектировщиком число; ki, li - любые действительные положительные числа, задаваемые проектировщиком ПА и зависящие от динамических свойств ПА и особенностей его взаимодействия с вязкой средой; li - расстояние от ПА до объекта 67, измеряемое датчиком 20.
Очевидно, что в описанном алгоритме формирования управляющего сигнала датчик команд 26 (ручное управление) должен быть отключен. Отключение этого датчика обеспечивается с помощью ключа 25. Указанный автоматический алгоритм управления имеет место только при значительных расстояниях между ПА и объектом 67. Это расстояние измеряется с помощью датчика 20 и, если оно становится меньше некоторого наперед заданного значения, то срабатывает пороговый элемент 22 и ключ 25 соединяет вторые входы блоков умножения 13, 17 и 44 с выходом датчика команд 26. В результате осуществляется переход на ручное управление ПА вблизи объекта 67. Порог срабатывания элемента 22 выбирается заранее. Он зависит от пути торможения ПА, который в свою очередь определяется гидродинамическими свойствами этого аппарата и возможной скоростью его движения в автоматическом режиме.
Если в процессе приближения ПА к объекту 67 независимо от расстояния между ними требуется использовать только ручное управление, то выход датчика 20 вручную отключается от входа порогового элемента 22 с помощью ключа 21. В результате независимо от расстояния между ПА и объектом 67 выходной сигнал порогового элемента 22 равен нулю и ключ 24 соединит соответствующие входы блоков 13, 17 и 44 с выходом датчика команд 26.
Если опять потребуется перейти на автоматическое управление, то ключ 21 замыкается. Однако когда вокруг объекта 67 работают другие ПА, пересекающие траекторию движения рассматриваемого ПА, то может понадобиться маневрирование его скоростью. В этом случае автоматический режим движения ПА к объекту 67 без оснащения его специальными средствами обнаружения других ПА и защиты от столкновения невозможен. В данной ситуации требуется непрерывное ручное управление. При этом, если в зоне движения ПА не появляется посторонних движущих аппаратов, то движение ПА к объекту 67 по-прежнему должно осуществляться по прямолинейной траектории и с максимальной скоростью. Причем эта скорость в любой момент времени должна быть уменьшена оператором, если на траектории движения или вблизи нее предполагается появление других ПА.
В данной ситуации ключ 24 вручную переключается оператором и соединяет выход ключа 23 с первым входом ключа 25. На выходе сумматора 33 формируется сигнал, равный разности между сигналом, вырабатываемым датчиком команд 26, и наименьшим из сигналов  ,
,  или
или  . Если эта разность отрицательна, то ни один из трех движителей еще не входит в насыщение и сигнал управления Uy, вырабатываемый оператором с помощью датчика команд 26, способен перемещать ПА по прямолинейной траектории к объекту 67. В этом случае ключ 23, на вход которого поступает нулевой сигнал с порогового элемента 34, размыкает цепь даже при значительном расстоянии до объекта 67 и на первый вход ключа 25 поступает нулевой управляющий сигнал, который отключает входы блоков 13, 17 и 44 от выхода ключа 38 и соединяет их с выходом ключа 35, через который проходит сигнал Uy от датчика команд 26.
. Если эта разность отрицательна, то ни один из трех движителей еще не входит в насыщение и сигнал управления Uy, вырабатываемый оператором с помощью датчика команд 26, способен перемещать ПА по прямолинейной траектории к объекту 67. В этом случае ключ 23, на вход которого поступает нулевой сигнал с порогового элемента 34, размыкает цепь даже при значительном расстоянии до объекта 67 и на первый вход ключа 25 поступает нулевой управляющий сигнал, который отключает входы блоков 13, 17 и 44 от выхода ключа 38 и соединяет их с выходом ключа 35, через который проходит сигнал Uy от датчика команд 26.
Если же выходной сигнал сумматора 33 становится положительным, то прямолинейное движение ПА к объекту 67 под действием сигнала Uy с выхода датчика 26 становится невозможным. В данной ситуации оператор пытается задать такую скорость движения ПА, которую тот не способен отработать в процессе прямолинейного движения к объекту 67, т.к. происходит насыщение одного из движителей. Допущенная оператором ошибка должна быть немедленно исправлена автоматической системой управления. При этом положительный сигнал с выхода сумматора 33 заставляет сработать пороговый элемент 34. В результате с помощью ключа 23 выход порогового элемента 22 соединяется с первым входом ключа 25. Поскольку большую скорость движения ПА оператор может задать только при значительном расстоянии до объекта 67, то сигнал с выхода порогового элемента 22 не равен нулю. В результате ключ 25 автоматически отстраняет оператора от управления ПА и независимо от допущенной им ошибки ПА продолжит движение к объекту 67 в автоматическом режиме прямолинейно и с максимально возможной скоростью.
Если на пути движения ПА появятся другие объекты, то оператор уменьшает сигнал Uy с выхода датчика команд 26. В результате сигнал с выхода сумматора 33 опять станет отрицательным, обнулится выход порогового элемента 34 и ключ 23 разомкнется. При этом ключ 25 опять подключит выход датчика 26 к входам блоков 13, 17 и 44 и ПА вновь подчинится команде оператора, переключаясь на ручное управление. Это ручное управление продолжится до тех пор, пока оператор не совершит очередную ошибку и не задаст с помощью датчика 26 не реализуемую при прямолинейном движении к объекту 67 скорость движения ПА. При новой ошибке оператора система опять переведет ПА на автоматическое управление. В результате ПА всегда будет двигаться к цели по кратчайшей прямолинейной траектории независимо от действий оператора. Это экономит и затрачиваемую энергию на перемещения и сокращает время подхода ПА к обнаруженным объектам 67.
Если неожиданных препятствий на пути к цели не предвидится, то оператор может опять перейти на полностью автоматическое управление ПА с максимально возможной скоростью его прямолинейного движения, вручную соединив с помощью ключа 24 выход порогового элемента 22 с входом ключа 25.
Если расстояние от ПА до объекта 67 уменьшится до такой величины, при которой появится нулевой сигнал с выхода пороговыйого элемента 22, то через замкнутый ненулевым сигналом с выхода порогового элемента 34 ключ 23 во всех случаях переведет управление ПА на ручной режим от датчика 26 даже тогда, когда оператор выдает с помощью этого датчика недопустимо большой для прямолинейного движения ПА к объекту 67 сигнал (с учетом насыщения движителей). В этой ситуации для устранения ошибки оператора переход на автоматический режим работы (при малом расстоянии от ПА до объекта 67) уже невозможен. Поэтому ошибочно большой сигнал управления, вырабатываемый оператором с помощью датчика 26, с целью сохранения прямолинейного движения к объекту 67 не должен поступить на входы блоков 13, 17 и 44, а также движителей 1, 2 и 46. Отключение этого ошибочного сигнала осуществляется ключом 35, на управляющий вход которого подается ненулевой сигнал с порогового элемента 34. При этом все движители перестают работать до тех пор, пока управляющий сигнал, вырабатываемый датчиком 26, будет больше сигнала  , или
, или  , или
, или  .
.
В указанной ситуации ПА продолжит движение к объекту 67 только по инерции и с малой скоростью за счет предварительного уменьшения управляющих сигналов на величину ki несмотря на недопустимо большие сигналы, вырабатываемые датчиком 26. Почувствовав торможение ПА, оператор должен понять свою ошибку, связанную с формированием большого сигнала Uy, и уменьшить его. Если этот управляющий сигнал станет меньше  , или
, или  , или
, или  , то на выходе сумматора 33 появится отрицательный сигнал, а на выходе порогового элемента 34 - нулевой сигнал, обеспечивающий замыкание ключа 35, который в свою очередь обеспечит прохождение создаваемого оператором уменьшенного (допустимого) сигнала на входы блоков умножения 13, 17, 44 и движителей 1, 2, 46. В результате прямолинейное движение ПА к объекту 67 будет продолжено с необходимой малой скоростью.
, то на выходе сумматора 33 появится отрицательный сигнал, а на выходе порогового элемента 34 - нулевой сигнал, обеспечивающий замыкание ключа 35, который в свою очередь обеспечит прохождение создаваемого оператором уменьшенного (допустимого) сигнала на входы блоков умножения 13, 17, 44 и движителей 1, 2, 46. В результате прямолинейное движение ПА к объекту 67 будет продолжено с необходимой малой скоростью.
Если оператор захочет быстро уничтожить объект 67 на большой скорости прямолинейного движения ПА путем тарана, то он должен вручную перевести ключ 38 из режима подключения к выходу блока 37 в режим его соединения с выходом ключа 51, обеспечивая соединение выхода ключа 51 со входами сумматора 33 и ключа 25.
Таким образом, предложенное устройство для управления ПА позволяет осуществить автоматический и ручной режимы управления сближением ПА с объектом 67, сохраняя прямолинейное движение ПА к этому объекту с максимально возможной скоростью даже при различных направлениях вращения винтов его движителей.
Устройство для управления подводным аппаратом, содержащее движители вертикального и горизонтального перемещений, телекамеру, установленную с возможностью поворота, первый датчик угла поворота телекамеры и первый пороговый элемент, последовательно соединенные первый сумматор, первый вход которого подключен к выходу первого источника опорного сигнала, второй пороговый элемент, логический элемент НЕ и логический элемент ИЛИ, второй вход которого через третий пороговый элемент подключен к выходу первого сумматора, последовательно соединенные первый синусный функциональный преобразователь, первый блок умножения, первый ключ, второй вход которого подключен к выходу первого порогового элемента, а также первый усилитель, выход которого соединен со входом движителя вертикального перемещения, и второй косинусный функциональный преобразователь, вход которого подключен ко входу первого синусного функционального преобразователя и выходу первого датчика угла поворота телекамеры, последовательно соединенные второй блок умножения и второй ключ, второй вход которого подключен к выходу логического элемента ИЛИ, а также второй усилитель, выход которого соединен со входом движителя горизонтального перемещения, последовательно соединенные датчик расстояния, третий ключ, четвертый пороговый элемент, четвертый ключ, пятый ключ, второй вход которого подключен к выходу четвертого порогового элемента, и шестой ключ, выход которого подключен ко вторым входам первого и второго блоков умножения, а также датчик команд, второй источник опорного сигнала и первый блок деления, последовательно соединенные второй сумматор и седьмой ключ, а также второй блок деления, первый вход которого соединен с выходом первого синусного функционального преобразователя, и третий источник опорного сигнала, последовательно соединенные третий сумматор, пятый пороговый элемент и восьмой ключ, второй вход которого подключен к выходу датчика команд и первому входу третьего сумматора, а выход - к третьему входу шестого ключа, причем выход пятого порогового элемента соединен со вторым входом четвертого ключа, последовательно соединенные первый многоуровневый релейный элемент, вход которого подключен к выходу третьего ключа, третий блок умножения и девятый ключ, выход которого подключен к вторым входам третьего сумматора и шестого ключа, последовательно соединенные второй датчик угла поворота телекамеры, третий косинусный функциональный преобразователь и четвертый блок умножения, выход которого подключен к первому входу первого блока деления и первому входу второго блока умножения, последовательно соединенные четвертый синусный функциональный преобразователь, вход которого подключен к выходу второго датчика угла поворота телекамеры, пятый блок умножения, второй вход которого подключен к выходу второго косинусного функционального преобразователя и второму входу четвертого блока умножения, и шестой блок умножения, второй вход которого подключен к выходу шестого ключа, а также третий усилитель, подключенный ко входу движителя поперечного перемещения, четвертый источник опорного сигнала и последовательно соединенные третий блок деления, первый вход которого подключен к выходу пятого блока умножения, первый блок взятия модуля, четвертый сумматор и десятый ключ, второй вход которого подключен к входу первого блока взятия модуля, третий - к выходу седьмого ключа и к второму входу четвертого сумматора, а выход - ко вторым входам третьего блока умножения и девятого ключа, причем первый вход второго сумматора подключен ко второму входу седьмого ключа и через второй блок взятия модуля - к выходу первого блока деления, а второй вход - к третьему входу седьмого ключа и через третий блок взятия модуля - к выходу второго блока деления, отличающееся тем, что в него дополнительно введены последовательно соединенные одиннадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу первого ключа, и пятый сумматор, второй вход которого подключен ко второму выходу одиннадцатого ключа, а выход - ко входу первого усилителя, последовательно соединенные двенадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу второго ключа, и шестой сумматор, второй вход которого подключен ко второму выходу двенадцатого ключа, а выход - ко входу второго усилителя, последовательно соединенные тринадцатый ключ, первый сигнальный и второй управляющий входы которого подключены к выходу шестого блока умножения, и седьмой сумматор, второй вход которого подключен ко второму выходу тринадцатого ключа, а выход - ко входу третьего усилителя, четвертый блок взятия модуля, вход которого подключен к выходу первого датчика угла поворота телекамеры и входу первого порогового элемента, а выход - к второму входу первого сумматора, последовательно соединенные пятый источник опорного сигнала и четырнадцатый ключ, второй сигнальный вход которого подключен к выходу второго источника опорного сигнала, третий управляющий вход - к выходу четвертого блока умножения, а выход - ко второму входу первого блока деления, последовательно соединенные шестой источник опорного сигнала и пятнадцатый ключ, второй сигнальный вход которого подключен к выходу четвертого источника опорного сигнала, третий управляющий вход - к выходу пятого блока умножения, а выход - ко второму входу третьего блока деления, а также последовательно соединенные седьмой источник опорного сигнала и шестнадцатый ключ, второй сигнальный вход которого подключен к выходу третьего источника опорного сигнала, третий управляющий вход - к выходу первого синусного функционального преобразователя, а выход - ко второму входу второго блока деления.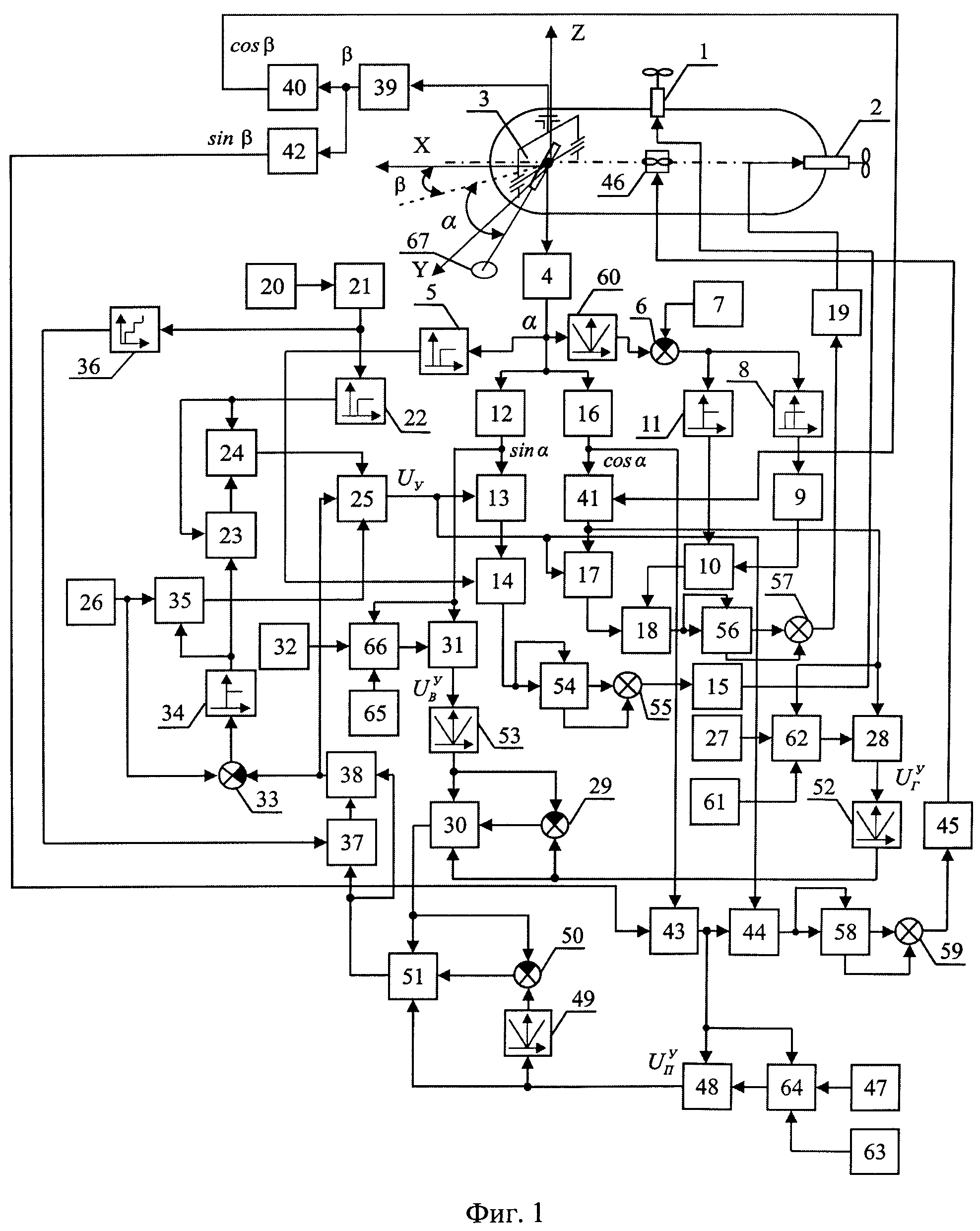
Способ обеспечения навигации автономного подводного робота
Способ производства хлебобулочных изделий
Композиция для приготовления хлебопекарного улучшителя
Майонез
Способ производства соуса майонезного
Способ фиксации и приготовления гистологических препаратов
Электрошпиндель
Подводный генератор отпугивающих звуков
Способ получения слоистого наноматериала
Состав для приготовления сахарного печенья
Устройство для формирования программных сигналов управления пространственным движением динамических объектов
Устройство для формирования программных сигналов управления пространственным движением динамических объектов
Самонастраивающийся электропривод
Самонастраивающийся электропривод
Электромашина
Установка для оценки усталости асфальтобетона при циклических динамических воздействиях
Устройство для управления подводным роботом
Устройство для формирования программных сигналов управления пространственным движением динамических объектов
Устройство для формирования программных сигналов управления пространственным движением динамических объектов
Тесто для производства хлебобулочных изделий

