Результат интеллектуальной деятельности: ПРИВОД С ДАТЧИКОМ УСИЛИЙ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к конструкции приводного устройства для измерения и/или контроля усилий, которые оно передает или которые оно воспринимает.
В частности, изобретение касается роторно-линейного приводного устройства с сателлитными роликами, который содержит систему измерения и контроля микроперемещений, создаваемых усилиями, которые действуют на уровне его крышки.
Предшествующий уровень техники
Крышка приводного устройства этого типа содержит между крепежной лапкой и цилиндрическим кожухом фланец, образующий кольцевую зону, которая может стать местом появления определенной упругой деформации под действием осевых усилий, которые могут возникать между крепежной лапкой и кожухом, который связан с подвижным штоком приводного устройства. Эти усилия в штоке проходят к кожуху через сателлитные ролики, через резьбовую втулку, которая выполняет роль гайки, и через средства направления и упора, установленные между гайкой и кожухом.
Эта кольцевая зона крышки может содержать, например, тензометры, которые позволяют получать информацию об усилиях, действующих на устройство.
Однако в некоторых областях применения, например в области авиации, использование тензометров, закрепляемых клеем на контролируемой зоне, не обеспечивает надежного получения данных во время всего срока службы устройства, который может быть относительно долгим.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание привода, оборудованного системой контроля и отслеживания усилий в этой кольцевой зоне его крышки, при этом система, выполненная в виде датчика, позволяет гарантированно получать надежную информацию в течение всего срока службы приводного устройства.
В области авиации, например, срок службы этих устройств соответствует сроку службы механизма, на котором они установлены.
Эта система контроля в соответствии с настоящим изобретением не требует никакого обслуживания, а также не подвержена напряжениям, которые могут ухудшить ее работу; действительно, она состоит из элементов, которые не входят в контакт друг с другом.
Таким образом, объектом изобретения является привод, оборудованный этой системой контроля усилий, которая содержит электромагнитный датчик измерения и контроля микроперемещений, которые возникают в крышке привода, при этом крышка содержит две зоны, имеющие разные диаметры и являющиеся концентричными вокруг оси привода, при этом одна из зон соответствует кожуху привода, а другая - внутреннему продолжению крепежной лапки крышки, и они соединены между собой фланцем, который образует кольцевую зону, деформирующуюся в осевом направлении, при этом датчик содержит обмотки, расположенные в ярме, которое соединено с одной из концентричных зон, причем якорь, проходящий в радиальном направлении и соединенный с другой концентричной зоной, и датчик дополнительно содержат средства измерения для обработки сигналов, поступающих от обмоток, при этом обмотки выполнены в виде тора и расположены в пазах ярма, при этом ярмо магнитно замкнуто якорем.
Согласно изобретению, датчик установлен в приводе и выполнен в виде двойного трансформатора предпочтительно с первичной обмоткой, распределенной в каждом трансформаторе, и вторичной обмоткой, установленной в каждом трансформаторе, при этом обмотки расположены в ярме в виде венца с центром на оси привода, при этом ярмо имеет Ш-образное сечение и плоскость симметрии, которая перпендикулярна оси привода, и это ярмо выполнено на уровне своих боковых стенок и своей центральной стенки таким образом, что образует вместе с якорем два воздушных зазора, сумма значений осевой толщины которых имеет постоянное значение, независимо от перемещения якоря относительно ярма.
Согласно предпочтительному отличительному признаку изобретения, якорь содержит зубцы, и ярмо тоже содержит зубцы ответной формы для установки якоря относительно ярма движением байонетного типа, то есть осевым поступательным движением для позиционирования двух деталей в одной плоскости симметрии, затем движением вращения для углового смещения якоря относительно ярма и для расположения выступающих частей зубцов друг против друга, при этом выступающие части образуют два воздушных зазора, расположенных в плоскостях, параллельных плоскости симметрии и перпендикулярных к оси привода.
Согласно варианту выполнения, зубчатый якорь выполнен в виде шайбы с центром на оси и в плоскости симметрии ярма, при этом якорь содержит бортик, сечение которого имеет С-образную форму, при этом бортик расположен сверху на центральной стенке, и полки бортика расположены напротив боковых стенок ярма.
Согласно варианту выполнения изобретения, зубчатый якорь выполнен в виде шайбы с центром на оси и в плоскости симметрии ярма, при этом якорь расположен между боковыми стенками ярма напротив его центральной стенки.
Согласно еще одному варианту выполнения, якорь выполнен в виде шайбы, вставленной в ярмо с Ш-образным сечением, и это ярмо состоит из элементов, соединенных между собой после установки на место якоря, при этом якорь расположен напротив центральной стенки ярма и образует два кольцевых воздушных зазора.
Согласно другому варианту, якорь состоит из двух симметричных шайб, соединенных после их размещения с двух сторон выступающей центральной стенки ярма, при этом якорь имеет С-образное сечение на уровне ярма и образует два кольцевых воздушных зазора, расположенных по обе стороны от центральной стенки, и его концы находятся напротив боковых стенок ярма.
Согласно изобретению, якорь соединяют либо с наружной частью деформирующейся детали, либо с центральной частью этой деформирующейся детали.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
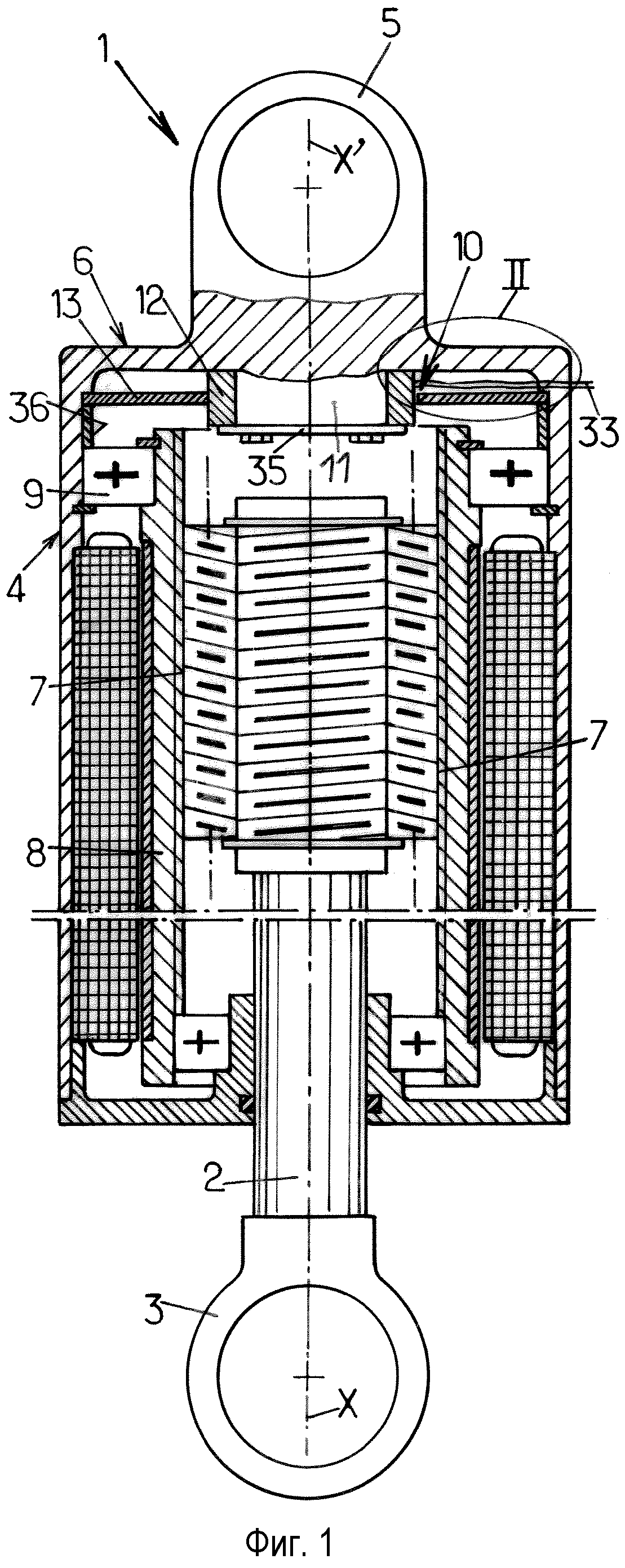
Фиг.1 изображает общий схематичный вид в разрезе роторно-линейного привода, содержащего датчик усилий в соответствии с настоящим изобретением;
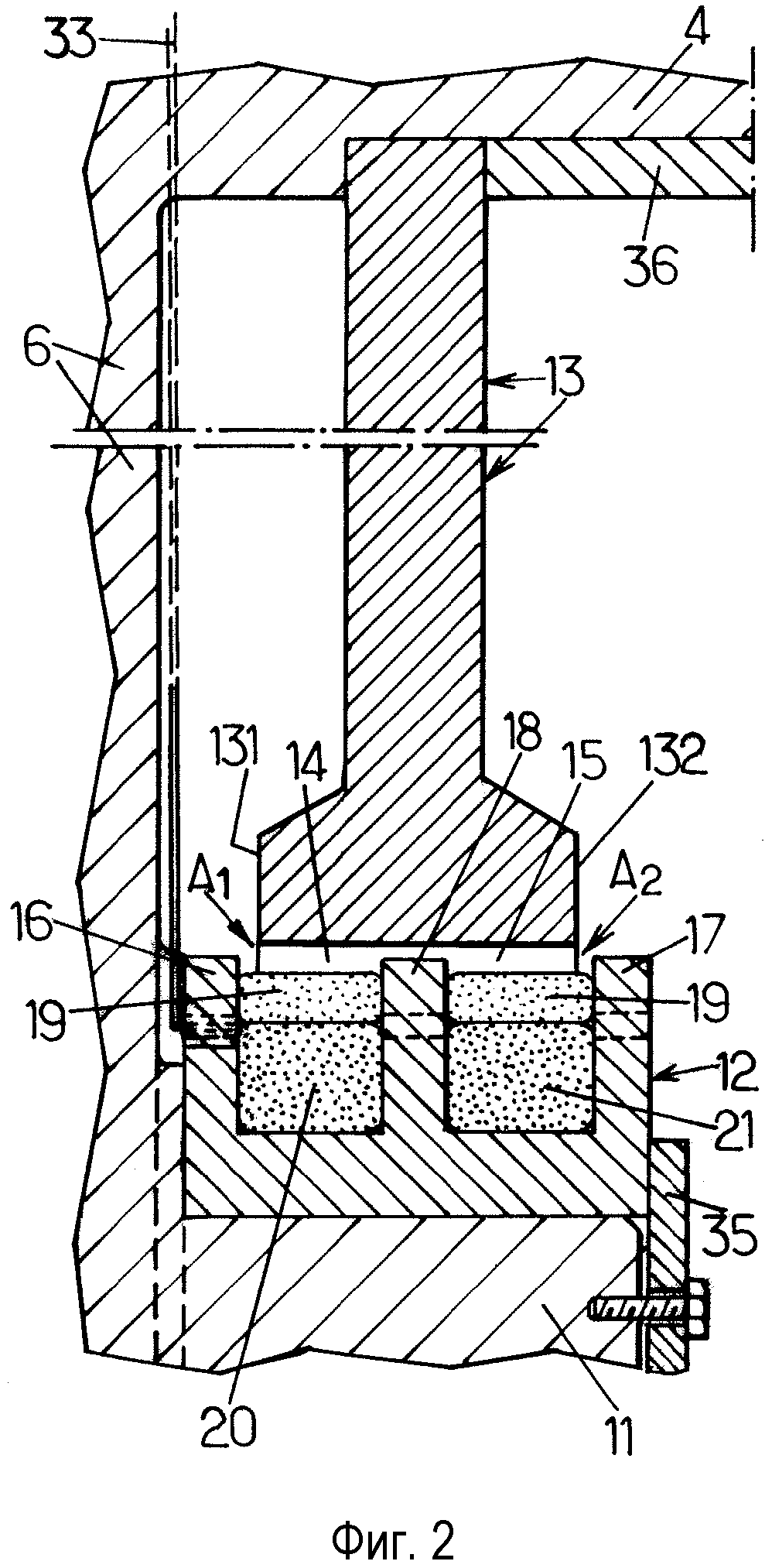
Фиг.2 изображает детальный вид в частичном разрезе составных элементов датчика согласно варианту выполнения изобретения;
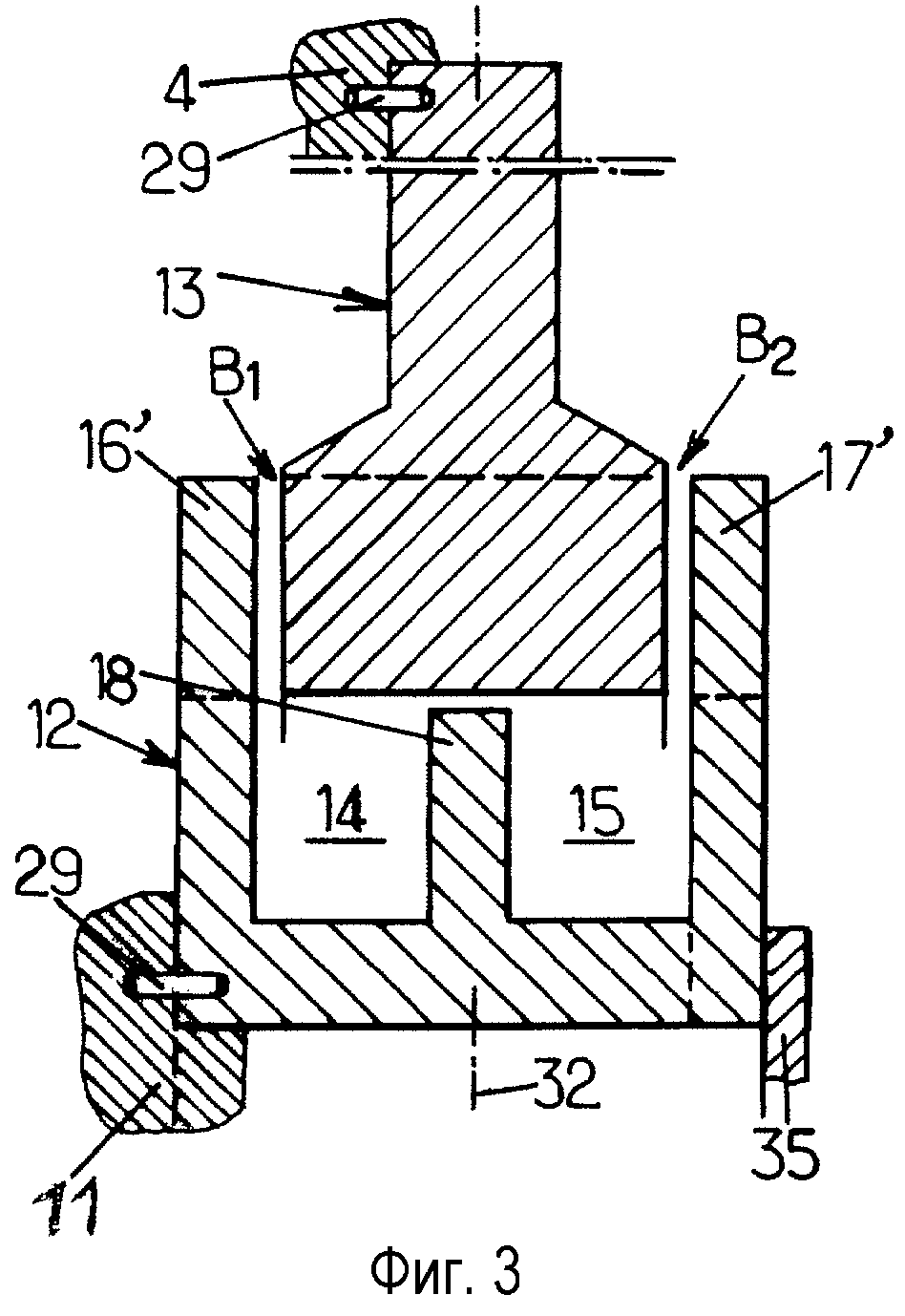
Фиг.3 изображает другой вариант выполнения датчика в соответствии с настоящим изобретением;
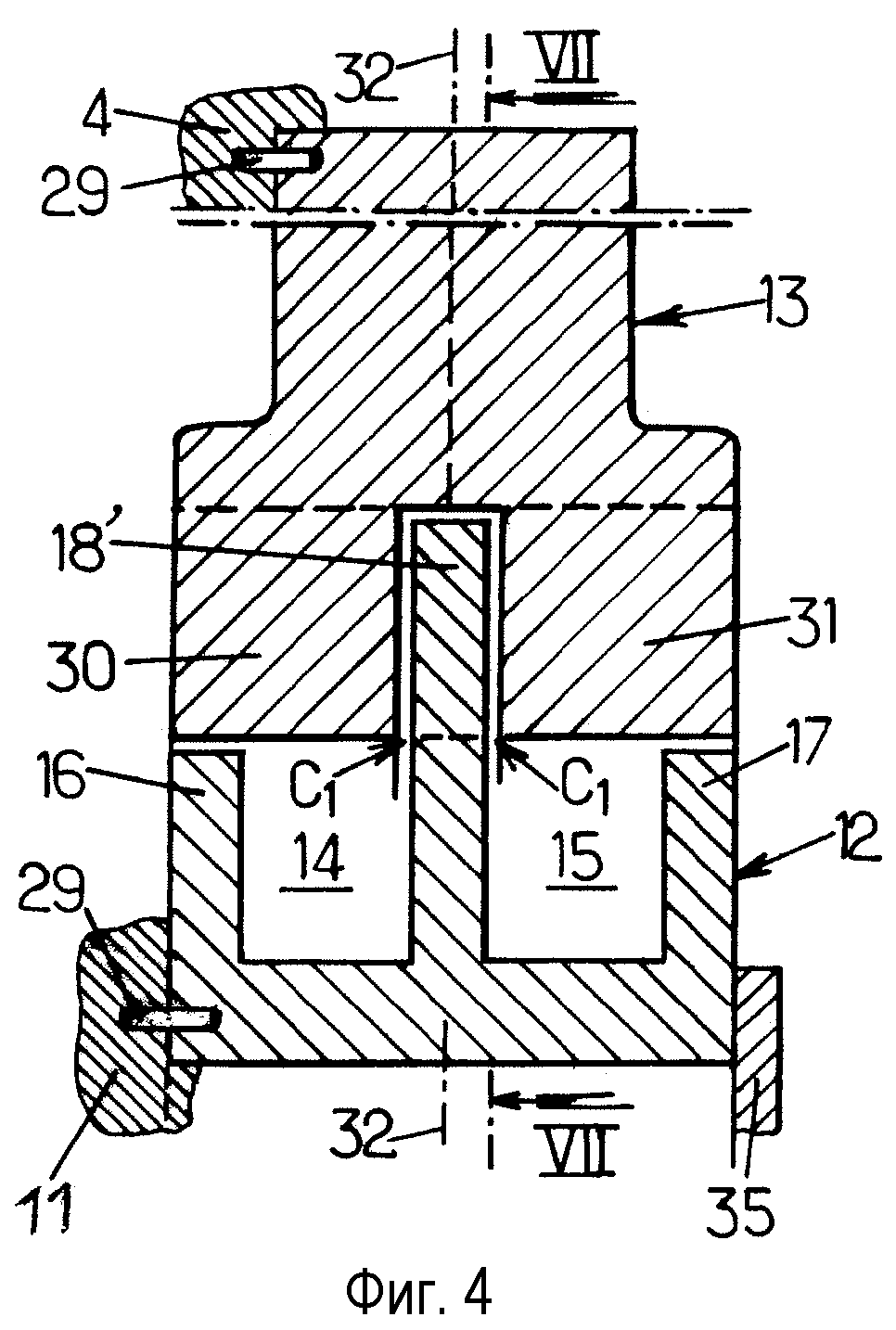
Фиг.4 изображает вариант выполнения датчика в соответствии с настоящим изобретением;
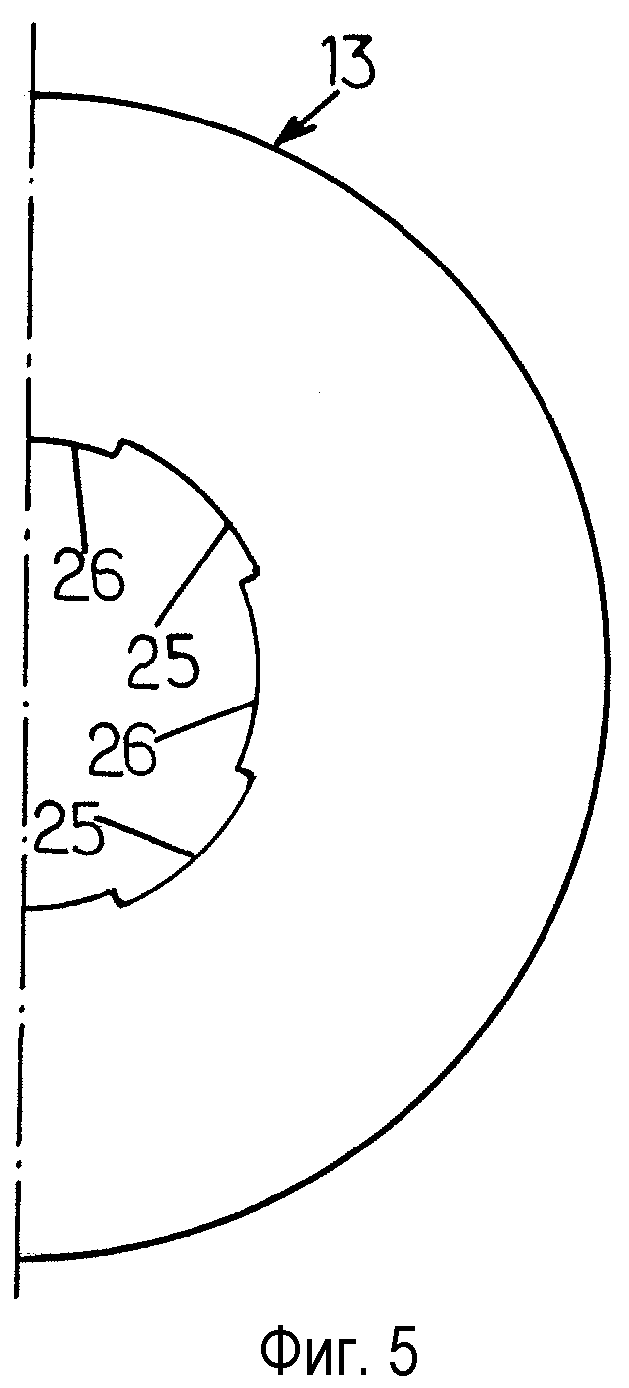
Фиг.5 изображает половину шайбы, выполняющей роль якоря в случае вариантов выполнения, показанных на Фиг.3 и 4;
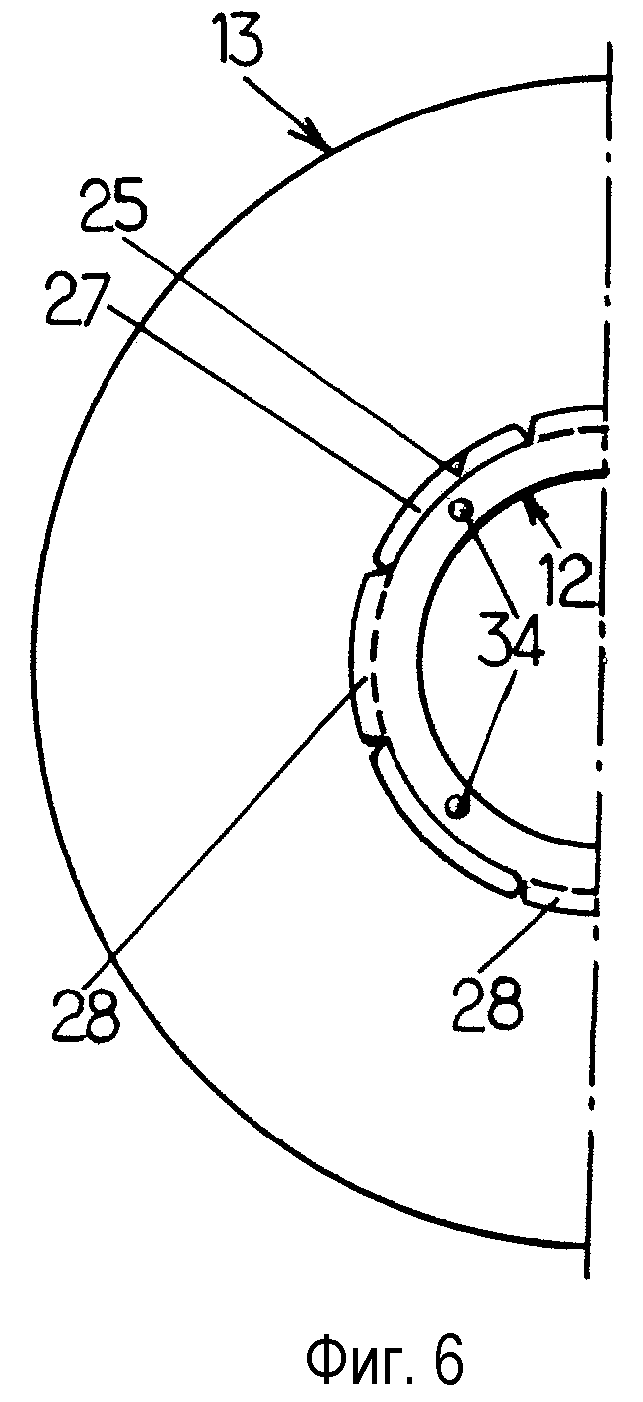
Фиг.6 изображает половинчатый вид спереди датчиков, показанных на Фиг.3 и 4;
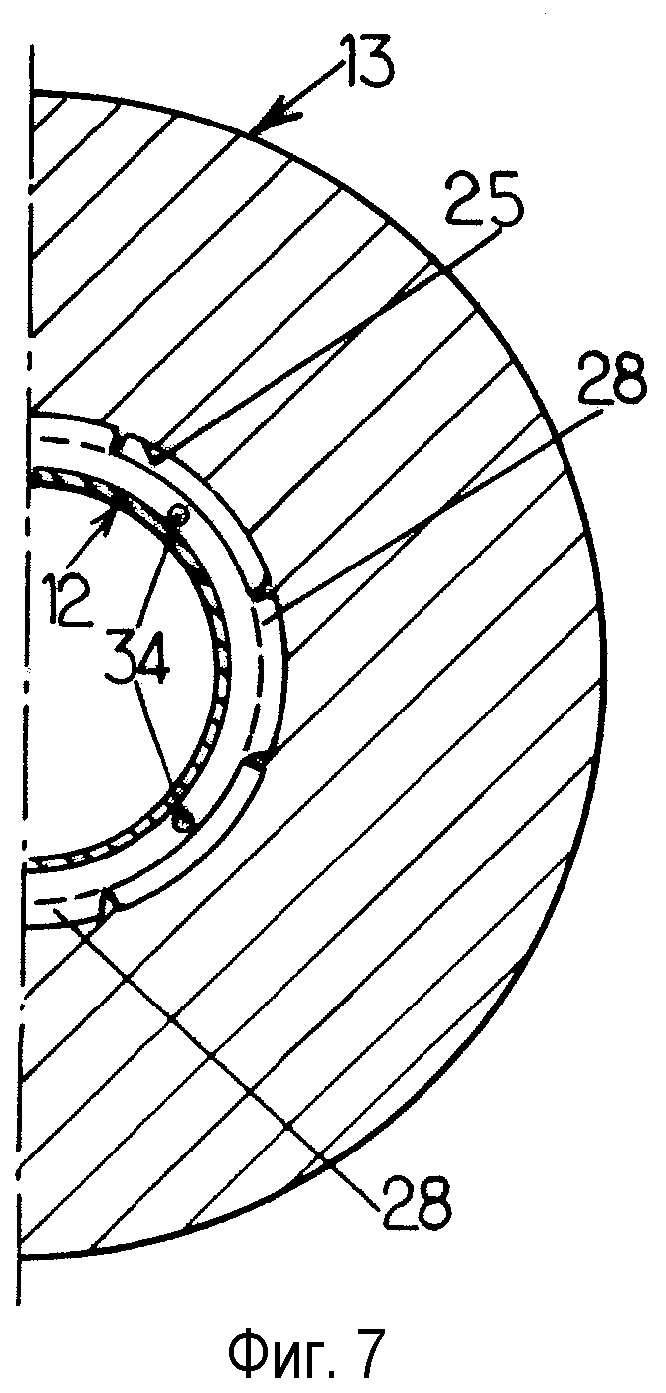
Фиг.7 изображает половинчатый вид в разрезе по линии VII-VII на Фиг.4.
Описание предпочтительных вариантов воплощения изобретения
На Фиг.1 схематично показано приводное устройство типа устройств, применяемых в области авиации для управления рулевыми элементами.
Это приводное устройство выполнено в виде силового цилиндра, содержащего с одной стороны крышку 1 или цоколь, с другой стороны рабочий шток 2, оборудованный на своем конце проушиной 3, и между ними, то есть между крышкой 1 и проушиной 3 - цилиндрический кожух 4.
Крышка 1 расположена на конце кожуха 4 и содержит лапку 5, которая служит для крепления приводного устройства, и между этой лапкой 5 и концом кожуха 4 она содержит кольцевой фланец 6, образующий деформирующуюся зону приводного устройства. Этот фланец 6 может деформироваться во время передачи усилий, и эта деформация позволяет наблюдать относительные микроперемещения вдоль оси X-X' приводного устройства между двумя зонами, которые являются концентричными вокруг этой оси X-X', при этом одна из этих зон соответствует кожуху 4, а другая - крепежной лапке 5.
Эти усилия, действующие на крышку 1, могут быть очень большими; они передаются через крепежную лапку 5 крышки 1 и через проушину 3 приводного штока 2 на приемный орган, например на руль управления летательным аппаратом.
На Фиг.1 в качестве примера показаны также составные элементы этого устройства, обычно называемого роторно-линейным приводом. Это роторно-линейное приводное устройство содержит между рабочим штоком 2 и крепежной лапкой 5 сателлитные ролики 7, которые перемещаются качением на резьбовом конце штока и на резьбовой части, выполненной внутри втулки 8, которая выполняет роль гайки. Эта втулка 8 направляется при вращении подшипниками качения и соединена с кожухом 4 со стороны крышки 1 через подшипник 9, выполняющий также роль упора и передающий усилия между этой втулкой 8 и кожухом 4.
Кольцевой фланец 6, выполненный между кожухом 4 и крепежной лапкой 5 крышки 1, подвергается упругим деформациям, зависящим от усилий, действующих на привод через крепежную лапку 5 и приводной шток 2.
Чтобы контролировать и измерять эти усилия приводное устройство содержит датчик 10 электромагнитного типа, встроенный внутри приводного устройства, при этом датчик 10 взаимодействует с двумя концентричными зонами, то есть с кожухом 4 и с крепежной лапкой 5, при этом концентричные зоны образуют фланец 6 и являются подвижными относительно друг друга в осевом направлении за счет микроперемещений.
Этот датчик 10 установлен внутри приводного устройства за фланцем 6 между кожухом 4 и цилиндрической площадкой 11 с центром на оси X-X' кожуха 4 в продолжении крепежной лапки 5. Он принадлежит к семейству датчиков положения, известных под сокращенным названием “LVDT” от “Linear Variable Differential Transformer”.
Электромагнитные средства, используемые в этом виде прибора, представляют собой двойной трансформатор, который позволяет преобразовать в электрические сигналы, используемые соответствующими средствами измерения, перемещения одной из деталей прибора, причем при любых перемещениях, даже микроперемещениях, как в случае этого приводного устройства.
Первый возможный вариант выполнения датчика 10 более детально показан на Фиг. 2. Он выполнен в виде двойного трансформатора, содержащего ярмо 12 в виде венца с Ш-образным сечением и ферромагнитный якорь 13 в виде кольца. Ярмо 12 неподвижно закреплено, например, на цилиндрической площадке 11, и в этом случае якорь 13 неподвижно закреплен на внутренней стенке кожуха 4.
Ярмо 12 содержит два набора обмоток, распределенных в двух пазах 14 и 15, ограниченных боковыми стенками 16, 17 и стенкой 18, находящейся в центре между боковыми стенками 16 и 17. В каждом из этих пазов 14 и 15 расположены две обмотки: с одной стороны, одна и та же первичная обмотка 19 и, с другой стороны, одна вторичная обмотка 20, расположенная в пазу 14, и другая вторичная обмотка 21, расположенная в пазу 15.
Первичная обмотка 19 получает питание током возбуждения и, когда сердечник 13 перемещается, направляет магнитный поток и изменяет токи, индуцируемые в каждой вторичной обмотке; эти токи преобразуются в сигналы, которые могут обрабатывать электронные средства для контроля и анализа величины перемещения и определения на его основе величины усилий, действующих на фланец 6 крышки 1.
Размеры якоря 13 определяют таким образом, чтобы он мог замыкать магнитную цепь, которая обеспечивает работу обоих трансформаторов.
В варианте выполнения, показанном на Фиг. 2, сигналы, передаваемые вторичными обмотками 20 и 21, соответствуют изменению расстояния между боковыми сторонами 131, 132 якоря 13 и концами боковых стенок соответственно 16 и 17 ярма 12.
Осевой воздушный зазор между ярмом 12 и сторонами 131 и 132 якоря 13 обозначен на фигуре соответственно А1 и А2; сложение этих двух воздушных зазоров А1 и А2 дает постоянное значение, когда якорь 13 остается в габарите ярма 12.
В действительности, относительные перемещения между кожухом 4 и крепежной лапкой 5 вдоль оси X-X' являются очень незначительными; они составляют, например, около ±0,2 мм с двух сторон радиальной плоскости симметрии ярма 12, при этом радиальная плоскость перпендикулярна к оси X-X'.
На Фиг.3 показан другой вариант выполнения датчика в соответствии с настоящим изобретением. Этот датчик содержит ярмо 12 в виде венца с Ш-образным сечением и образует, как и в предыдущем случае, два трансформатора. Это ярмо 12 закреплено на цилиндрической площадке 11 при помощи соответствующих механических средств, которые будут описаны ниже, и содержит две боковые стенки 16', 17' и центральную стенку 18.
Боковые стенки 16' и 17' венца выступают относительно центральной стенки 18 и охватывают якорь 13, образуя воздушные зазоры В1 и В2 кольцевой формы. Внутренний бортик якоря 13 находится напротив центральной стенки 18.
Для размещения якоря 13 между боковыми стенками 16' и 17' ярма 12, как показано на Фиг.3, ярмо 12 может содержать расположенные друг с другом рядом элементы, которые соединяются друг с другом после установки на место якоря 13 между стенками 16' и 17'.
Согласно другому решению, показанному на Фиг.5 и 6, на бортике якоря 13 и, соответственно, на боковых стенках 16' и 17' ярма 12 выполнены зубцы.
Якорь 13 содержит выемки 25, которые соответствуют выступам 26 ярма 12, и, наоборот, ярмо 12 содержит выемки 27, которые соответствуют выступам 28 якоря 13. Таким образом, якорь 13 может заходить в ярмо 12, располагаясь напротив центральной стенки 18. Эта установка на место выполняется при помощи байонетного движения, то есть осевого движения с последующим вращательным движением якоря 13 относительно ярма 12 или наоборот, чтобы совместить их выступы, соответственно 26 и 28, между которыми находятся воздушные зазоры В1 и В2.
Для удержания на месте ярма 12 и якоря 13 необходимы средства фиксации. Эти средства фиксации могут быть выполнены в виде штифта 29, как показано на Фиг.3.
В варианте выполнения, показанном на Фиг. 4, в данном случае центральная стенка 18' ярма 12 выступает относительно боковых стенок 16 и 17. Активная часть якоря 13 имеет С-образное сечение, которое охватывает выступающую часть центральной стенки 18' ярма 12. Две полки 30 и 31 якоря 13 находятся напротив боковых стенок 16 и 17 ярма 12 и образуют вместе с центральной стенкой 18' два кольцевых воздушных зазора С1 и С2, которые имеют те же характеристики, что и в предыдущем варианте: сумма значений толщины этих двух воздушных зазоров С1 и С2 является константой при любом положении якоря 13 относительно стенки 18' ярма 12.
Как и в предыдущем случае, для позиционирования якоря 13 относительно ярма 12, то есть, чтобы установить их в одной плоскости симметрии 32, якорь 13 может содержать две симметричные части, соединяемые друг с другом по плоскости симметрии 32 после их установки на место вокруг центральной стенки 18' ярма 12.
Другое решение, показанное на Фиг.5 и 6, может содержать выполнение зубцов на каждой полке 30 и 31 и, соответственно, на центральной стенке 18' ярма 12.
На каждой из своих полок 30 и 31 якорь 13 содержит выполненные в линию осевые выемки 25, которые соответствуют выступам 26 ярма 12, и, наоборот, ярмо 12 содержит выемки 27, которые соответствуют выступам 28 полок 30 и 31 якоря 13. Таким образом, якорь 13 может заходить на ярмо 12, располагаясь сверху с охватом на центральной стенке 18'. Эта установка на место выполняется при помощи байонетного движения, то есть осевого движения с последующим вращательным движением якоря 13 относительно ярма 12 или наоборот, чтобы совместить их выступы, между которыми находятся воздушные зазоры С1 и С2.
Для удержания на месте ярма 12 и якоря 13 относительно друг друга тоже необходимы средства фиксации. Эти средства фиксации могут быть выполнены в виде простого штифта 29, как показано на Фиг.3 и 4.
Ярмо 12 и якорь 13 можно устанавливать как на цилиндрической площадке 11, так и на кожухе 4.
В случае якоря 13, соединяемого с кожухом 4, и ярма 12, соединяемого с площадкой 11, как показано на различных фигурах, провода 33 обмоток 19, 20 и 21 располагают между внутренней стороной фланца 6 и якорем 13 датчика. Как показано на Фиг.3 и 4, провода 33 выходят на периферии ярма 12. Эти провода 33 могут проходить через отверстия 34 или вырезы, которые выполнены в не активной в магнитном плане части или частях ярма 12; эти отверстия 34, показанные на Фиг.6 и 7, выполнены на уровне выемок 27 ярма 12 в их средней части.
Предпочтительно ярмо 12 крепят на центральной площадке 11 при помощи шайбы 35 за счет прижатия, при этом шайба 35 представляет собой, например, пластинчатую пружину, соединенную с площадкой 11 при помощи винта. Эта шайба 35 может также служить для разметки положения ярма 12 и представлять собой альтернативу возможной фиксации при помощи штифта 29, как было указано выше.
Якорь 13 стопорят, например, при помощи кольца 36, которое выполняет роль опоры для подшипника 9, который выполняет функцию направляющей и упора.
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства
Модульная электрическая плата для силовых компонентов
Способ измерения при помощи гироскопической системы
Инерциальный датчик угловой скорости с компенсацией отклонения
Электрический блок с отдельными управляющими и силовыми модулями
Гондола двигателя летательного аппарата, содержащая подвижный капот, перемещаемый электродвигателями
Вибродатчик с двумя каналами, активируемыми последовательно
Цепь возбуждения датчиков постоянного тока
Частично металлизированный резонатор
Способ определения курса путем поворота инерциального устройства
Способ определения курса путем поворота инерциального устройства

