Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА С ОГРАНИЧЕНИЕМ УГЛА ПОВОРОТА СОЛНЕЧНОЙ БАТАРЕИ
Вид РИД
Изобретение
Способ управления ориентацией солнечной батареи космического аппарата с ограничением угла поворота солнечной батареи относится к системам электроснабжения космических аппаратов (КА) и может быть применен при управлении спутниками, имеющими круговые или эллиптические орбиты. Снабжение электроэнергией бортового оборудования КА, включая заряд его аккумуляторных батарей, осуществляется при помощи солнечных батарей (СБ). Величина тока, вырабатываемого СБ, зависит от ориентации плоскости ее рабочей поверхности относительно Солнца.
Управление ориентацией СБ осуществляется при помощи бортовых автоматических систем управления, которые управляют устройствами поворота СБ, состоящими из электронных блоков и электромеханических приводов с закрепленными на выходном валу панелями и датчиками положения СБ.
В состав бортовых автоматических систем управления входят бортовые цифровые вычислительные машины, в которых реализуются алгоритмы управления движением КА, а также управления бортовым оборудованием, а том числе алгоритмы управления ориентацией СБ.
Бортовая автоматическая система управления, используя информацию от соответствующих датчиков (астродатчиков, датчиков положения Солнца и др.), определяет положение КА в пространстве и направление на Солнце относительно связанных с КА осей координат, при помощи средств управления движением (двигателей орбитального маневрирования, газовых двигателей и др.) управляет положением КА в пространстве, а при помощи устройств поворота СБ управляет ориентацией панелей СБ.
Таким образом, в соответствии с заложенными алгоритмами, бортовая автоматическая система управления осуществляет определение текущих угловых положений вектора направления на Солнце и нормали к рабочей поверхности СБ относительно связанных с КА осей координат. При достижении рассогласования между указанными угловыми положениями бортовая автоматическая система управления формирует команды на вращение СБ по или против часовой стрелки для его уменьшения, а отсутствие рассогласования формирует команды на прекращение вращения СБ.
В зависимости от назначения КА, особенностей его конструкции, требуемых характеристик по электроснабжению, сроков эксплуатации и других факторов, на борту КА могут устанавливаться одна или несколько СБ. Используемые в современных КА устройства поворота позволяют вращать панели СБ по кругу на 360°. Вместе с тем установленное на КА бортовое оборудование, например для проведения научных исследований, в некоторых угловых положениях может соприкасаться с панелью СБ, в результате чего может происходить заклинивание, либо поломка панелей СБ или бортового оборудования. При указанном ограничении допустимый угол поворота СБ составляет величину менее 180°. В то же время для выполнения ряда задач, например по исследованию определенных областей и объектов космического пространства, положение КА должно изменяться в ограниченном диапазоне углов, либо фиксироваться относительно исследуемого объекта. В связи с этим в процессе управления учитываются параметры задаваемой орбиты, требуемая ориентация КА во время продолжительных исследований космического пространства, а также расположение бортового оборудования, ограничивающего угол поворота СБ. При этом задают указанные параметры таким образом, чтобы панель СБ обеспечивала максимально возможный ток, а направление на Солнце для СБ во время указанных исследований изменялось бы в границах, либо близко к границам угла ограничения. Таким образом, стоит задача эффективного управления ориентацией СБ с целью обеспечения максимально возможного тока при ограничении угла поворота СБ менее 180°.
Наиболее близким техническим решением, принятым за прототип, является способ управления положением СБ, сущность которого заключается в том, что определяют угловую скорость СБ, затем по времени пересечения СБ границы между дискретными секторами датчика угла вычисляют расчетный угол относительно измеренного углового положения СБ. Данный угол вычисляют как произведение угловой скорости СБ на время ее вращения. Вращают СБ в направлении уменьшения рассогласования между заданным и ее расчетным углами. По соответствующим углам отклонения нормали к рабочей поверхности СБ определяют углы разбега и торможения СБ. Корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения показаний датчика угла на величину одного дискретного сектора. По углам разбега и торможения, а также по минимально допустимому и максимально возможному токам, вырабатываемым СБ, задают порог срабатывания. При превышении указанного порога формируется рассогласование между заданным и расчетным углами СБ. Задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами СБ. Вращение СБ прекращают, если рассогласование между заданным и расчетным углами начинает увеличиваться, но не превышает порога срабатывания [1].
Технической задачей предлагаемого изобретения является расширение функциональных возможностей способа управления ориентацией СБ с целью исключения заклинивания или поломки панели СБ или бортового оборудования КА и обеспечение максимально возможного тока в условиях ограничений углов поворота СБ.
Указанный технический результат достигается тем, что в известном способе управления положением солнечной батареи космического аппарата, заключающемся в том, что определяют заданный угол солнечной батареи как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют угловое положение нормали к рабочей поверхности солнечной батареи относительно связанных с космическим аппаратом осей координат в плоскости вращения солнечной батареи с точностью до дискретного сектора соответствующего датчика угла, определяют угловую скорость вращения солнечной батареи по времени пересечения солнечной батареей границы между дискретными секторами датчика угла, вычисляют расчетный угол относительно измеренного углового положения солнечной батареи как произведение угловой скорости солнечной батареи на время ее вращения, вращают солнечную батарею в направлении уменьшения рассогласования между заданным и расчетным углами, определяют угол разгона солнечной батареи и угол торможения, корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения значений датчика угла на величину одного дискретного сектора, задают порог срабатывания, при превышении которого формируется рассогласование между заданным и расчетными углами, как:
 ,
,
где αCP - порог срабатывания;
αРАЗГ - угол разгона солнечной батареи;
αТОРМ - угол торможения солнечной батареи;
IMIN - минимально допустимый ток, вырабатываемый солнечной батареей;
IMAX - максимально возможный ток, вырабатываемый солнечной батареей,
задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, как:
αОТП≈αТОРМ,
где αОПТ - порог отпускания,
прекращают вращение солнечной батареи, если рассогласование между заданным и текущим углами начинает увеличиваться, но не превышает порога срабатывания, дополнительно задают угловую скорость вращения солнечной батареи на порядок и выше максимальной угловой скорости вращения космического аппарата вокруг Земли, задают угловую величину дискретного сектора датчика угла менее порога срабатывания, а угол ограничения поворота солнечной батареи в диапазоне:
90°≤αОГР<180°,
где αОГР - угол ограничения поворота солнечной батареи, задают рабочий угол солнечной батареи, биссектриса которого совпадает с биссектрисой угла ограничения, как:
αСР<αРАБ<(αОРГ-2·((αРАЗГ+αТОРМ)),
где αРАБ - рабочий угол солнечной батареи,
присваивают заданному углу значение углового положения ближайшего к нему луча рабочего угла, если положение указанной выше проекции единичного вектора направления на Солнце находится вне рабочего угла, формируют сигнал отказа и прекращают управление солнечной батареей, если угловое положение нормали к рабочей поверхности солнечной батареи находится вне рабочего угла и при этом изменяется в направлении увеличения угла относительно ближайшего к нему луча рабочего угла.
На фиг.1 представлено положение КА относительно Солнца и Земли, на фиг.2 - датчик угла, выполненный в виде круга вращения СБ, на фиг.3 - возможные положения нормали к рабочей поверхности СБ в круге вращения СБ.
Способ управления ориентацией солнечной батареи космического аппарата с ограничением угла поворота солнечной батареи реализуется следующим образом.
Устройство поворота СБ имеет электромеханический привод с угловой скоростью вращения выходного вала на порядок и более максимальной угловой скорости вращения КА вокруг Земли в перигее орбиты, то есть:
ωСБ>10·ωО,
где ωСБ - установившаяся угловая скорость СБ;
ωО - угловая скорость вращения КА вокруг Земли.
По паспортным данным, а также по результатам экспериментов на стендах определяют угол разгона αРАЗГ выходного вала электромеханического привода с закрепленной на нем СБ как угловое отклонение нормали к рабочей поверхности СБ относительно связанных с КА осей координат от момента появления рассогласования между заданным и текущим углами до достижения СБ установившейся угловой скорости СБ. Кроме того, определяют угол торможения αТОРМ выходного вала электромеханического привода с закрепленной на нем СБ как угловое отклонение нормали к рабочей поверхности СБ от момента прекращения рассогласования между заданным и текущим углами СБ при наличии установившейся угловой скорости до полного прекращения вращения СБ.
Как известно, ток, формируемый панелью СБ, определяется уравнением:

где I - ток, вырабатываемый СБ;
IMAX - максимально возможный ток, вырабатываемый СБ, при совпадении проекции единичного вектора направления на Солнце и нормали к рабочей поверхности СБ в плоскости вращения нормали;
αTEK - текущий угол СБ;
αЗАД - заданный угол СБ;
|αЗАД-αТЕК| - модуль разности между заданным и текущим углами СБ.
Учитывая уравнение (1), задают порог срабатывания, как угол, при котором формируется сигнал рассогласования между заданным и текущим угловым положением СБ, как:

где αCP - порог срабатывания СБ;
αРАЗГ - угол разгона СБ;
αТОРМ - угол торможения СБ;
IMIN - задаваемый минимально допустимый ток, вырабатываемый СБ для питания бортовой аппаратуры КА;
IMAX - максимально возможный ток, вырабатываемый СБ при совпадении нормали к рабочей поверхности СБ и проекции единичного вектора направления на Солнце на плоскость вращения СБ,
далее задают порог отпускания, при котором прекращается формирование сигнала рассогласования между заданным и текущим углом СБ, как:

где αОТП - порог отпускания.
Датчик угла, установленный на выходном валу электромеханического привода устройства поворота СБ, представляет собой круг 360°, который разбит на равные дискретные угловые сектора, при этом:
где σ - угловая величина дискретного сектора датчика угла;
n - число дискретных секторов в круге вращения СБ.
По результатам экспериментов на стендах определяют угол ограничения, образованный двумя положениями нормали к рабочей поверхности СБ, в которых конструктивные элементы КА соприкасаются с элементами конструкции СБ, причем внутри угла ограничения указанные соприкосновения отсутствуют, при этом угол ограничения находится в диапазоне:

где αОГР - угол ограничения СБ.
Задают рабочий угол СБ, биссектриса которого совпадает с биссектрисой угла ограничения, как:

где αРАБ - рабочий угол СБ.
Во время полета КА по орбите при помощи датчиков (датчиков положения Солнца, астродатчиков), а также путем вычисления относительно связанной с КА системы координат определяют угловое положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ. Кроме того, определяют текущий угол СБ как положение указанной выше нормали относительно связанных с КА осей координат.
Если проекция единичного вектора направления на Солнце находится в границах рабочего угла, то при наличии рассогласования между заданным и текущим углом СБ более угла срабатывания формируют команду на вращение СБ по кратчайшему пути в направлении уменьшения угла рассогласования. При этом вычисляют текущий угол как произведение угловой скорости на время вращения СБ, а в моменты пересечения нормали к рабочей поверхности СБ границы между дискретными секторами датчика угла, текущему углу присваивают фактическое значение пересеченной границы. Таким образом, текущий угол СБ определяют, как:

где αТЕК - текущий угол СБ;
αФi - фактический угол СБ в момент пересечения i-й границы между дискретными секторами датчика угла;
ωСБ - угловая скорость вращения СБ;
ti - время вращения СБ от момента пересечения i-й границы, при этом 0≤i≤(n-1).
Формируют команду на прекращение вращения СБ, если рассогласование между заданным и текущим углами достигает угла отпускания.
В случае если положение проекции единичного вектора направления на Солнце находится вне рабочего угла, заданному углу присваивают значение, равное угловому положению ближайшего к нему луча рабочего угла. Угловое положение нормали может отличаться от углового положения ближайшего луча рабочего угла на величину не более порога срабатывания, но при штатной работе всегда находится в границах этого угла.
В случае если угловое положение нормали к рабочей поверхности СБ находится вне рабочего угла и при этом продолжает изменяться в направлении увеличения от ближайшего к нему луча рабочего угла, формируют сигнал отказа и прекращают управление СБ.
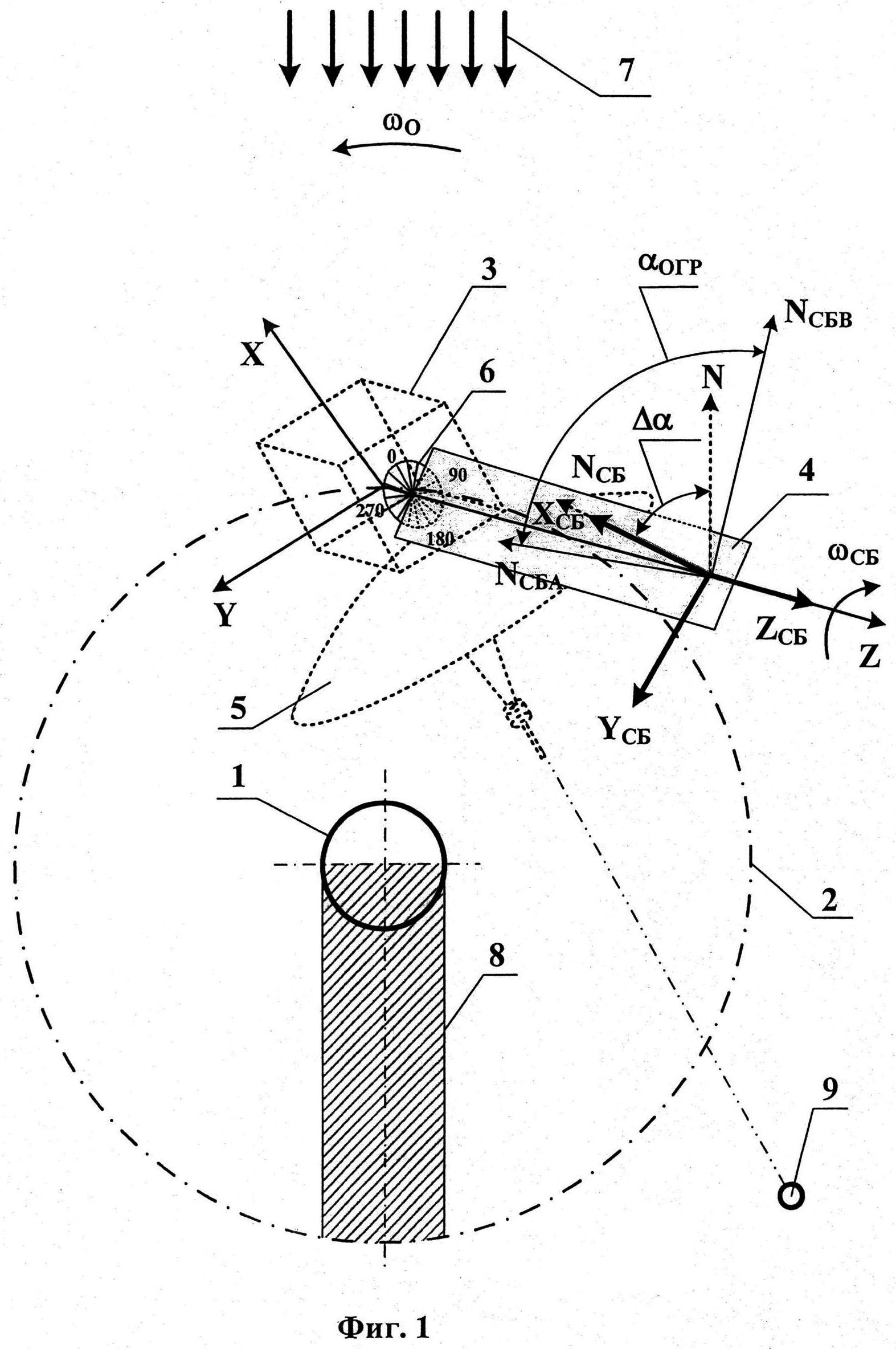
На фиг.1 представлено положение КА относительно Солнца и Земли,
где
1 - Земля;
2 - орбита КА;
3 - корпус КА;
4 - панель СБ;
5 - научная аппаратура КА;
6 - датчик угла СБ;
7 - направление излучения от Солнца;
8 - теневой участок орбиты;
9 - объект наблюдения;
N - заданное направление ориентации СБ как проекция единичного вектора направления на Солнце на плоскость вращения нормали к рабочей поверхности СБ;
NСБ - нормаль к рабочей поверхности СБ;
X, Y, Z - оси связанной с КА системы координат;
XСБ, YСБ, ZСБ - оси связанной с СБ системы координат;
NСБА, NСБВ - положения нормали к рабочей поверхности СБ, в которых панель СБ соприкасается с аппаратурой КА;
ωO - направление угловой орбитальной скорости КА относительно Земли;
ωСБ - направление угловой скорости СБ относительно оси Z;
αОГР - угол ограничения поворота панели СБ;
Δα - угол рассогласования нормали к рабочей поверхности СБ и заданного направления ориентации СБ.
Вокруг Земли 1 по орбите 2 с угловой скоростью ωO вращается КА. С корпусом 3 КА жестко связаны оси X, Y, Z связанной с КА системы координат. На корпусе 3 КА установлена панель СБ 4, а также научная аппаратура 5 (например, радиотелескоп). Оси XСБ, YСБ, ZСБ образуют связанную с СБ систему координат. СБ вращается вокруг оси ZСБ, причем направления осей ZСБ и Z совпадают, а плоскость, образованная осями XСБ и YСБ, параллельна плоскости, образованной осями X и Y. Направление нормали к рабочей поверхности СБ NСБ совпадает с направлением оси XСБ. Угловое положение указанной нормали NСБ определяется при помощи датчика угла 6 СБ, закрепленного на корпусе 3 КА, причем указанный датчика угла 6 формирует нулевое значение при совпадении направлений осей XСБ и X. В соответствии с направлением излучения Солнца 7 определяют направление проекции единичного вектора направления на Солнце N на плоскость, образованную осями XСБ и YСБ. Во время полета КА по орбите 2 он периодически попадает в тень Земли 8.
При совпадении положения нормали NСБ с положениями лучей NСБА и NСБВ панель 4 СБ соприкасается с оборудованием КА. Таким образом, поворот панели СБ вокруг оси ZСБ ограничен углом αОГР, образованным лучами NСБА и NСБВ. В процессе полета панель 4 СБ разворачивают таким образом, чтобы обеспечить минимальный угол рассогласования Δα между направлением проекции единичного вектора направления на Солнце N на плоскость вращения нормали к рабочей поверхности СБ, образованную осями XСБ и YСБ и указанной нормалью NСБ, в результате чего обеспечивается формирование максимального возможного тока.
В рабочем положении КА разворачивается таким образом, чтобы научная аппаратура 5, установленная на его борту, обеспечивала ориентацию на объект наблюдения 9.
На рабочем участке поворота панели СБ, то есть если нормаль NСБ находится в границах угла ограничения αОГР и если рассогласование между положением указанной нормали NСБ и проекцией N становится более порога срабатывания, панель СБ разворачивается с угловой скоростью ωСБ до совмещения положения нормали NСБ с положением проекции N. В случае если проекция N находится вне угла ограничения, нормаль NСБ занимает положения внутри угла αОГР близкие к положениям NСБА и NСБВ.
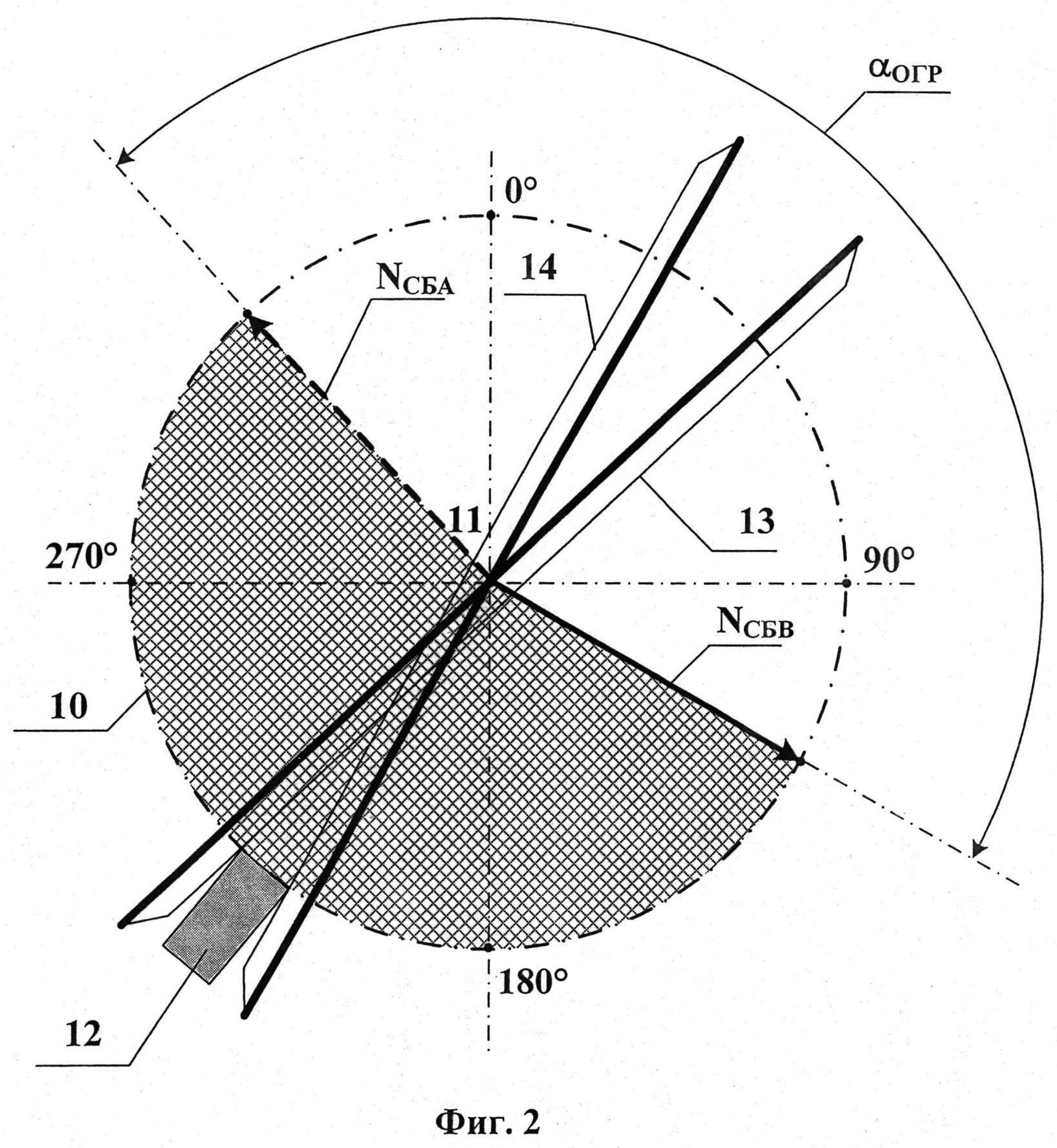
Ha фиг.2 представлен датчик угла, выполненный в виде круга вращения СБ, где:
10 - круг вращения нормали к рабочей поверхности СБ;
11 - центр круга вращения нормали к рабочей поверхности СБ;
12 - элементы конструкции КА, ограничивающие вращение СБ;
13, 14 - положения панели СБ;
NСБА - положение нормали к рабочей поверхности СБ, соответствующее положению 13 панели;
NСБВ - положение нормали к рабочей поверхности СБ, соответствующее положению 14 панели;
αОГР - угол ограничения поворота СБ.
В круге вращения 10 датчик угла осуществляет измерение положения нормали к рабочей поверхности СБ относительно связанных с КА осей координат. На чертеже показаны фиксированные значения датчика угла 0°, 90°, 180°, 270°. Центр круга 11 совпадает с осью ZСБ, направленной перпендикулярно к плоскости вращения нормали. Элементы конструкции 12 КА в положениях 13 и 14 панелей СБ соприкасаются с ней и таким образом физически ограничивают вращение панели СБ, при этом лучи угла ограничения αОГР соответствуют положениям нормали NСБА и NСБВ.
На фиг.3 представлены возможные положение нормали к рабочей поверхности СБ в круге вращения СБ, где:
15 - круг вращения нормали к рабочей поверхности СБ;
16 - центр круга вращения нормали к рабочей поверхности СБ;
N1, N2, N3, NA, NB, NРАБ, NЗАП - положения проекций единичного вектора направления на Солнце, на плоскость вращения нормали к рабочей поверхности СБ;
NСБ1, NСБ2, NСБ2, NСБ4, NОГРА, NОГРА, NОГРВ - положения нормали к рабочей поверхности СБ;
αОГР - угол ограничения поворота СБ;
αЗАП - угол запрета поворота СБ;
αРАБ - рабочий угол СБ;
αА, αВ - буферные углы;
ΔαА, ΔαВ - углы рассогласования между заданным и текущим углами СБ.
В круге вращения 15 нормали к рабочей поверхности СБ с центром 16 угол ограничения αОГР угла поворота СБ образован лучами NОГРА и NОГРВ соответствующими положениям нормалей к рабочей поверхности СБ, в которых бортовое оборудование КА соприкасается с панелью СБ.
Величина угла запрета поворота αЗАП СБ определяется, как:
αЗАП=360-αОГР.
Рабочий угол αРАБ СБ образован лучами NА и NВ, угловые положения которых соответствуют значениям заданного угла, если проекция единичного вектора направления на Солнце выходит за его пределы.
Буферные углы αА и αВ, каждый из которых более суммы углов разгона и торможения, образованы лучами NA, NОГРА и NВ и NОГРВ соответственно, при этом:
 .
.
Управление ориентацией СБ зависит от положения проекции единичного вектора заданного направления на Солнце в данном круге, а также положения нормали к рабочей поверхности СБ.
Если указанная проекция занимает положение в границах рабочего угла N1, то на момент окончания вращения СБ нормаль к рабочей поверхности СБ занимает положение NСБ1, совпадающее с положением N1.
Если проекция находится вне рабочего угла, но в границах, образованных лучами NВ, NЗАП, то положение нормали NСБ3 находится в границах рабочего угла и может отличаться от положения луча NА на величину не более порога срабатывания.
Если проекция находится вне рабочего угла, но в границах, образованных лучами NB, NЗАП, то положение нормали NСБ3 находится в границах рабочего угла и может отличаться от положения луча NB на величину не более порога срабатывания.
Если положение нормали выходит за пределы рабочего угла αРАБ, например, соответствует положениям NСБ4 или NСБ5 и при этом наблюдается изменение положения нормали в направлении к ближайшему лучу угла ограничения, соответственно NОГРА или NОГРВ, формируется сигнал отказа и прекращается управление СБ.
Предлагаемый способ позволяет исключить заклинивание или поломки панели СБ или бортового оборудования КА в условиях ограничения угла поворота СБ и обеспечить ее ориентацию таким образом, чтобы получить максимально возможный ток.
Источники информации
1. Патент РФ 2356788, В64С 1/00, 28.12.2007 г.
Способ управления ориентацией солнечной батареи космического аппарата с ограничением угла поворота солнечной батареи, заключающийся в том, что определяют заданный угол солнечной батареи как положение проекции единичного вектора направления на Солнце на плоскость вращения нормали к ее рабочей поверхности относительно связанных с космическим аппаратом осей координат, измеряют угловое положение нормали к рабочей поверхности солнечной батареи относительно связанных с космическим аппаратом осей координат в плоскости вращения солнечной батареи с точностью до дискретного сектора соответствующего датчика угла, определяют угловую скорость вращения солнечной батареи по времени пересечения солнечной батареей границы между дискретными секторами датчика угла, вычисляют расчетный угол относительно измеренного углового положения солнечной батареи как произведение угловой скорости солнечной батареи на время ее вращения, вращают солнечную батарею в направлении уменьшения рассогласования между заданным и расчетным углами, определяют угол разгона солнечной батареи и угол торможения, корректируют расчетный угол по измеренному угловому положению указанной нормали в моменты изменения значений датчика угла на величину одного дискретного сектора, задают порог срабатывания, при превышении которого формируется рассогласование между заданным и расчетными углами, как: ,где α - порог срабатывания;α - угол разгона солнечной батареи;α - угол торможения солнечной батареи;I - минимально допустимый ток, вырабатываемый солнечной батареей;I - максимально возможный ток, вырабатываемый солнечной батареей, задают порог отпускания, менее которого прекращается рассогласование между заданным и расчетным углами солнечной батареи, как:α≈ α,где α - порог отпускания,прекращают вращение солнечной батареи, если рассогласование между заданным и текущим углами начинает увеличиваться, но не превышает порога срабатывания, отличающийся тем, что задают угловую скорость вращения солнечной батареи на порядок и выше максимальной угловой скорости обращения космического аппарата вокруг Земли, задают угловую величину дискретного сектора датчика угла менее порога срабатывания, а угол ограничения поворота солнечной батареи в диапазоне:90° ≤ α< 180°,где α - угол ограничения поворота солнечной батареи, задают рабочий угол солнечной батареи, биссектриса которого совпадает с биссектрисой угла ограничения, как:α< α< (α-2·(α+α)),где α - рабочий угол солнечной батареи,присваивают заданному углу значение углового положения ближайшего к нему луча рабочего угла, если положение указанной выше проекции единичного вектора направления на Солнце находится вне рабочего угла, формируют сигнал отказа и прекращают управление солнечной батареей, если угловое положение нормали к рабочей поверхности солнечной батареи находится вне рабочего угла и при этом изменяется в направлении увеличения угла относительно ближайшего к нему луча рабочего угла.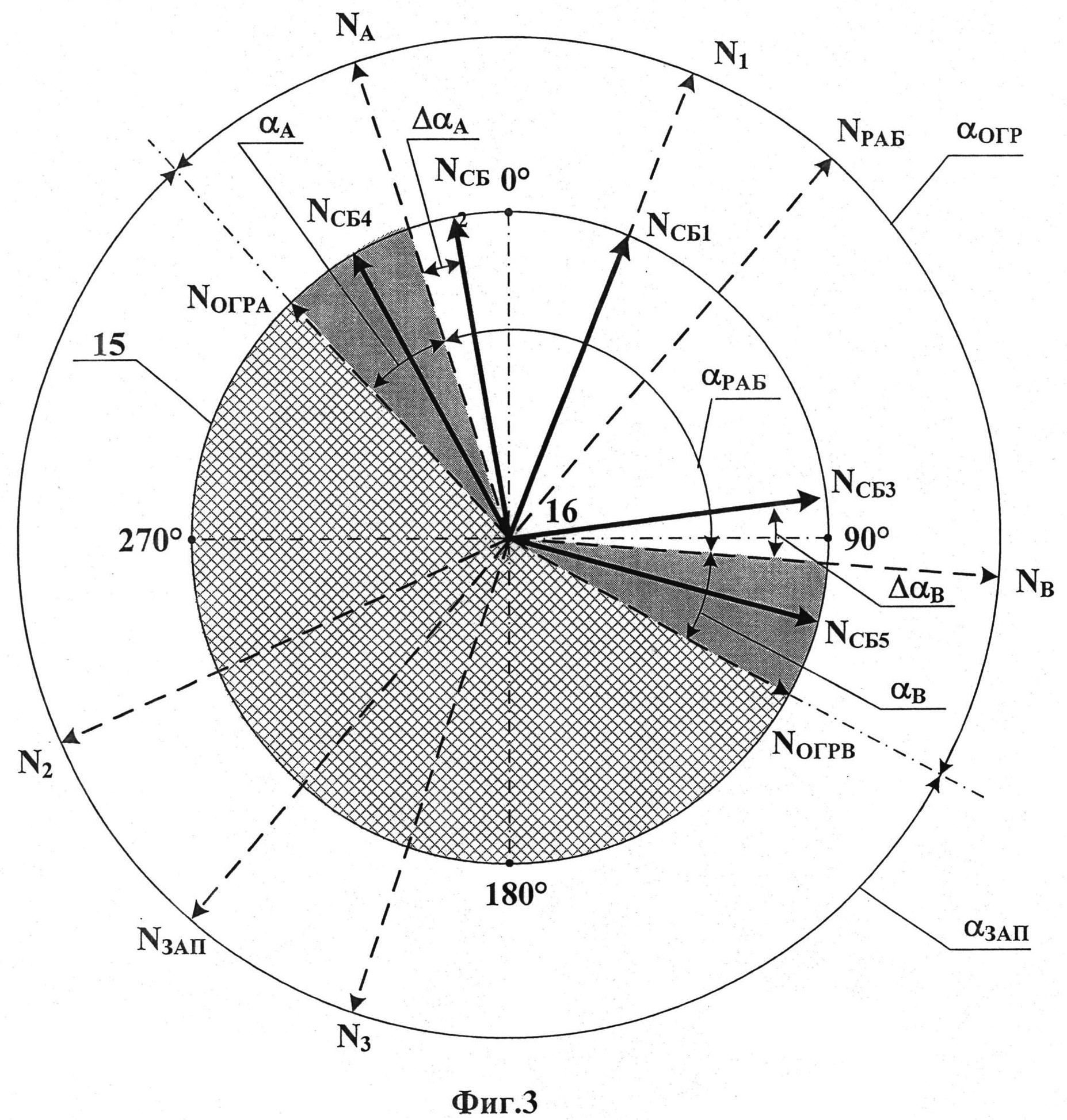
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления

