Результат интеллектуальной деятельности: СПОСОБ ВЫПОЛНЕНИЯ СИНХРОНИЗИРОВАННОЙ РОБОТИЗИРОВАННОЙ ТЕХНОЛОГИЧЕСКОЙ ОПЕРАЦИИ НА КОНСТРУКЦИИ, ИМЕЮЩЕЙ ОГРАНИЧЕННОЕ ПРОСТРАНСТВО, В ЧАСТНОСТИ НА КЕССОНЕ КРЫЛА ЛЕТАТЕЛЬНОГО АППАРАТА, СООТВЕТСТВУЮЩЕЕ КОМПЬЮТЕРНОЕ УСТРОЙСТВО И РОБОТИЗИРОВАННАЯ УСТАНОВКА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к полностью автоматизированному способу выполнения технологической операции на конструкции, имеющей ограниченное пространство, к способу, выполняемому на кессоне крыла летательного аппарата, к изделиям с машинной памятью, в которую в виде кода заложены данные по управлению первой и второй роботизированными системами для осуществления указанных способов, а также к установке для осуществления указанных способов. Кроме того, объектом изобретения является способ позиционирования рабочего органа внутри ограниченного пространства конструкции.
Уровень техники
При сборке летательного аппарата некоторые технологические операции выполняют синхронно на противоположных сторонах конструкции. Можно рассмотреть операцию крепления, выполняемую на кессоне крыла. Роботизированная система, находящаяся снаружи кессона, выполняет сверление коническое зенкование и установку крепежного элемента. Сборщик, находящийся внутри отсека кессона крыла, помогает проведению этих операций, а также устанавливает втулку и гайку на введенный крепежный элемент, который удерживается роботизированной системой.
Желательно было бы устранить ручной труд и полностью автоматизировать такую операцию крепления. Хотя установка гайки на резьбу болта может быть простым действием для человека, для роботизированной системы эта работа не так проста. Точное позиционирование и ориентация гайки над болтом является сложной задачей.
Эта задача тем более сложна, так как роботизированной системе необходимо закреплять гайку в условиях ограниченного пространства. Фактор, дополнительно осложняющий выполнение этой задачи, заключается в том, что роботизированной системе необходимо проникнуть в ограниченное пространство через отверстие доступа. Еще один фактор, дополнительно осложняющий выполнение этой задачи, заключается в том, что на летательном аппарате все допуски находятся в очень узких пределах. Еще более усложняет выполнение этой задачи то, что роботизированная система, находящаяся внутри ограниченного пространства, должна выполнять операции синхронно с той роботизированной системой, которая находится снаружи ограниченного пространства.
Раскрытие изобретения
Одним объектом изобретения является полностью автоматизированный способ выполнения технологической операции на конструкции, имеющей ограниченное пространство и определенное место, идентифицируемое изнутри и извне ограниченного пространства. При осуществлении способа перемещают первый рабочий орган посредством первой роботизированной системы внутри ограниченного пространства таким образом, чтобы первый рабочий орган расположился над указанным местом, и генерируют первый вектор, соответствующий указанному месту. Перемещают второй рабочий орган посредством второй роботизированной системы снаружи ограниченного пространства таким образом, чтобы второй рабочий орган расположился над указанным местом, и генерируют второй вектор, соответствующий указанному месту. Первый и второй векторы используют для перемещения первого и второго рабочих органов к новому месту таким образом, чтобы первый и второй рабочие органы оказались в рабочих положениях напротив друг друга. Посредством первого и второго рабочих органов выполняют технологическую операцию в указанном новом месте.
Еще одним объектом изобретения является способ позиционирования рабочего органа внутри ограниченного пространства конструкции, характеризующийся тем, что посредством гибкой руки робота перемещают рабочий орган через выполненное в конструкции отверстие доступа внутрь ограниченного пространства, посредством руки робота приблизительно позиционируют рабочий орган над определенным местом поверхности в ограниченном пространстве, посредством руки робота прижимают рабочий орган к поверхности, и посредством связанного с рабочим органом устройства перемещают рабочий орган вдоль поверхности для точной установки рабочего органа в указанном месте.
Еще одним объектом изобретения является способ, выполняемый на предварительно собранном кессоне крыла летательного аппарата. Предварительно собранный кессон крыла содержит группу крепежных элементов. При осуществлении способа первая роботизированная система перемещает первый рабочий орган внутри отсека кессона крыла над первым и вторым временными крепежными элементами и генерирует первые векторы для первого и второго крепежных элементов. Вторая роботизированная система перемещает второй рабочий орган снаружи отсека кессона крыла над первым и вторым крепежными элементами и генерирует вторые векторы для первого и второго крепежных элементов. Первый и второй векторы используют для вычисления положений постоянных (обеспечивающих окончательное соединение) крепежных элементов, находящихся между первым и вторым крепежными элементами. Положения постоянных крепежных элементов для первой роботизированной системы вычисляют по первым векторам, а положения постоянных крепежных элементов для второй роботизированной системы вычисляют по вторым векторам.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
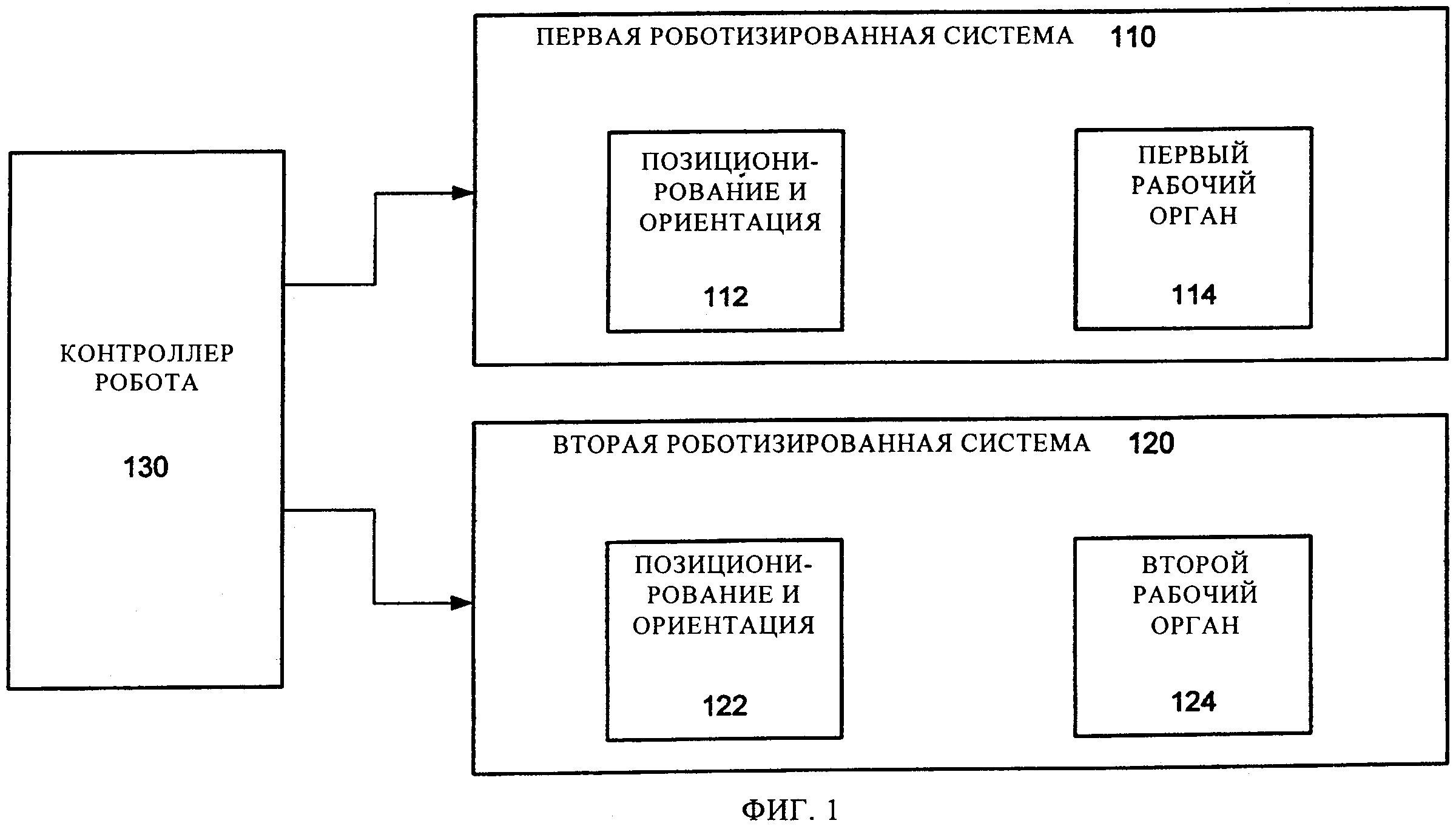
на фиг.1 - установка, включающая в себя первую и вторую роботизированные системы и контроллер робота,
на фиг.2 - блок-схема, иллюстрирующая способ управления роботизированными системами,
на фиг.3а и 3б - блок-схемы устройства и способа для точного позиционирования внутри ограниченного пространства,
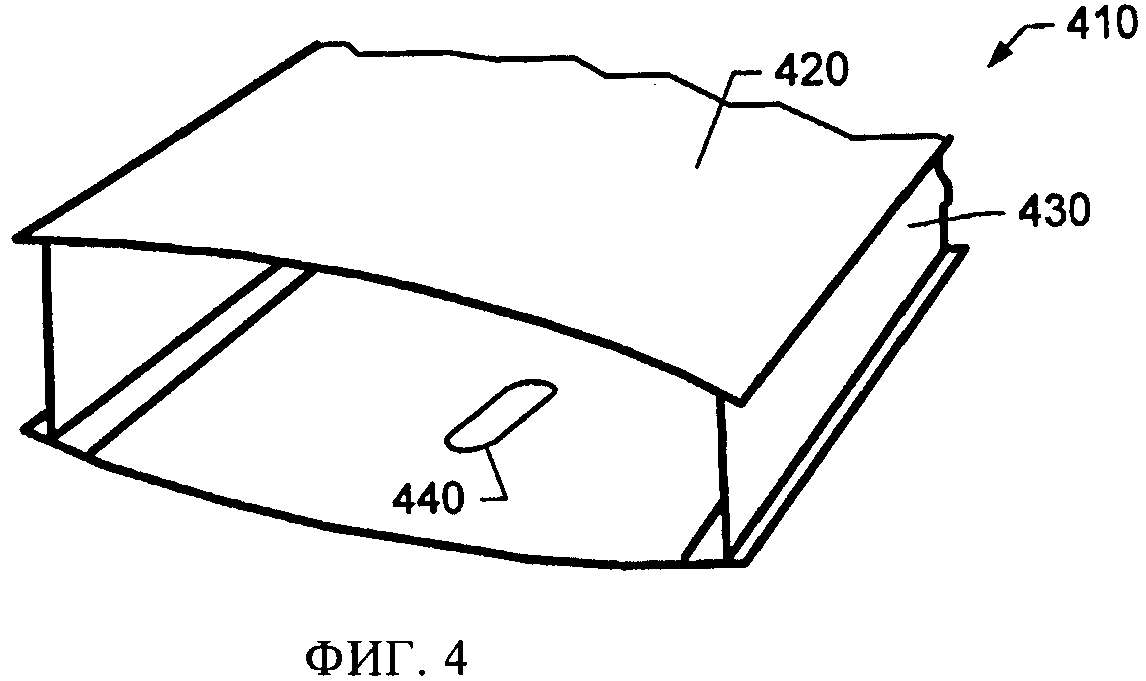
на фиг.4 - отсек кессона крыла летательного аппарата,
на фиг.5а и 5б - блок-схема способа работы роботизированных систем,
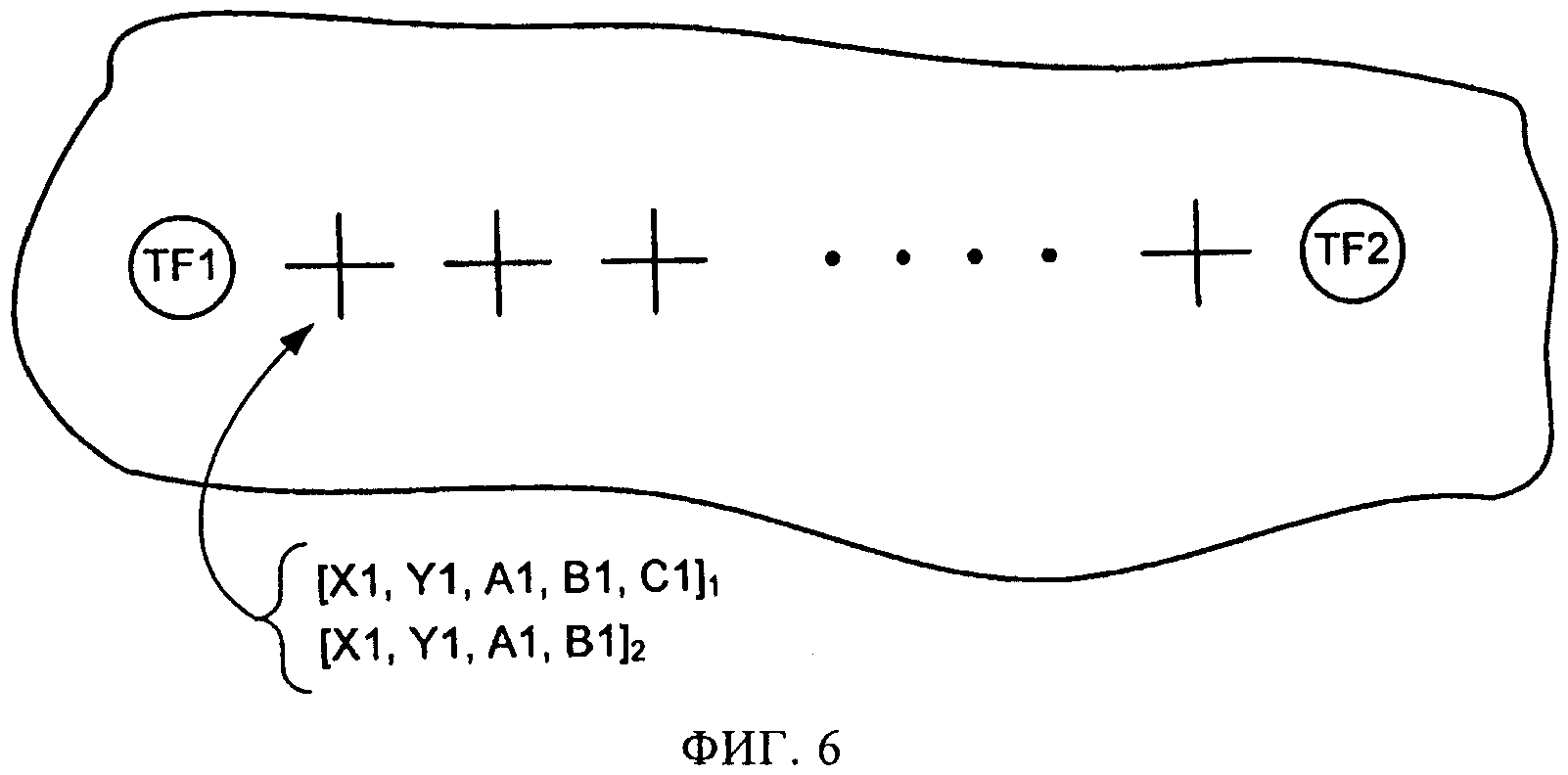
на фиг.6 - положения постоянных крепежных элементов относительно двух предварительно установленных крепежных элементов,
на фиг.7 - блок-схема, иллюстрирующая способ выполнения технологической операции крепления,
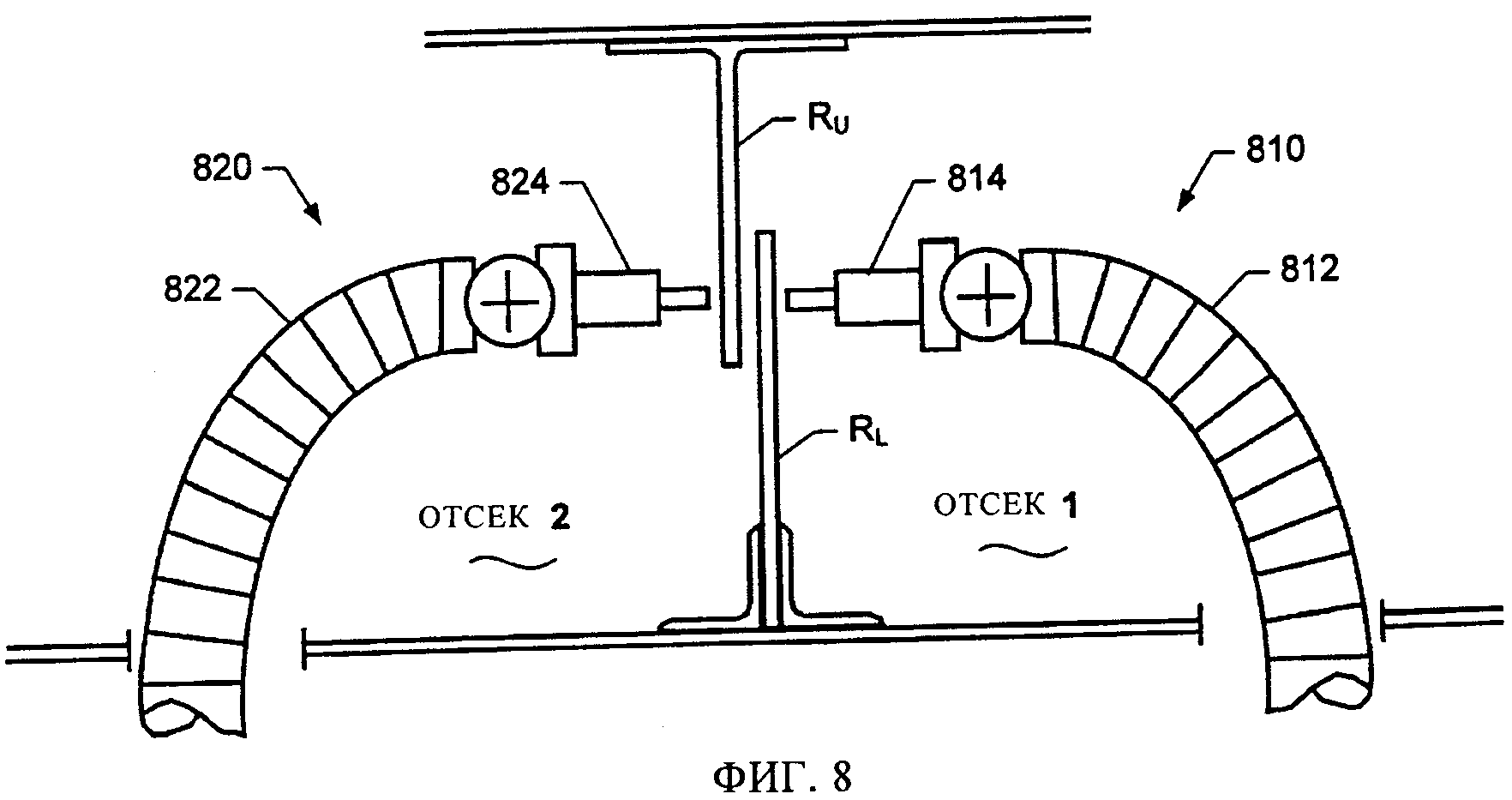
на фиг.8 - две руки робота, находящиеся в соседних ограниченных пространствах,
на фиг.9 - блок-схема, поясняющая методологию производства и эксплуатации летательных аппаратов.
Осуществление изобретения
На фиг.1 представлены первая и вторая роботизированные системы 110 и 120, предназначенные для выполнения одной или нескольких технологических операций на конструкции, имеющей ограниченное пространство. Первая роботизированная система 110 содержит устройство 112 позиционирования и ориентации, предназначенное для перемещения первого рабочего органа 114 в ограниченное пространство и ориентации его в этом ограниченном пространстве. Вторая роботизированная система содержит устройство 122 позиционирования и ориентации, предназначенное для перемещения второго рабочего органа 124 снаружи ограниченного пространства. Как только первый и второй рабочие органы 114 и 124 будут ориентированы и позиционированы, они начинают выполнять на конструкции одну или несколько технологических операций (например, сборочную операцию).
Контроллер 130 робота может содержать компьютер, запрограммированный на управление роботизированными системами 110 и 120. Компьютер имеет машинную память, или запоминающее устройство, в которую в виде кода заложены команды управления первой и второй роботизированными системами 110 и 120.
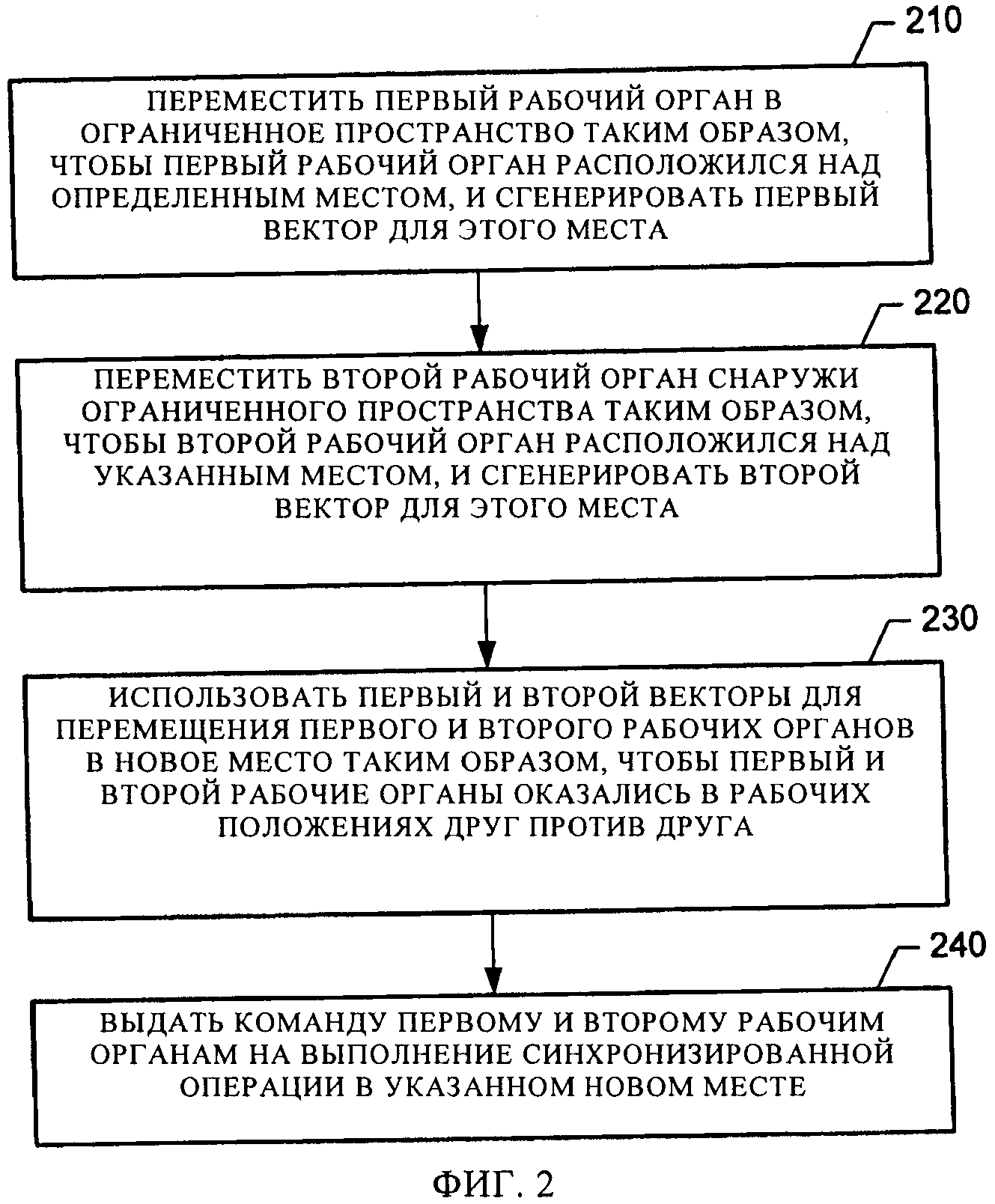
На фиг.2 проиллюстрирован способ управления работой первой и второй роботизированных систем 110 и 120 при выполнении синхронизированной технологической операции на конструкции, имеющей ограниченное пространство. Конструкция имеет место, которое может быть идентифицировано, или определено, изнутри ограниченного пространства, а также снаружи ограниченного пространства. Это место можно идентифицировать, в частности, визуально (например, с помощью метки, крепежного элемента, отверстия или другой особенности конструкции), магнитным способом (например, с помощью встроенного магнита) или с помощью снабженного прибором крепежного элемента (как описано далее).
В блоке 210 первой роботизированной системе 110 выдается команда на перемещение первого рабочего органа 114 в ограниченное пространство таким образом, чтобы первый рабочий орган 114 установился над определенным местом. При установке первого рабочего органа 114 в этом положении первая роботизированная система 110 передает, или сообщает, контроллеру 130 робота первый вектор. Первый вектор может включать информацию о положении (например, в координатах x-y) и/или угловую ориентацию (например, по отношению нормали к поверхности).
Точность позиционирования первого рабочего органа 114 определяется конкретным применением. Например, точность при сборке летательного аппарата будет обычно выше, чем при сборке промышленных конструкций других типов.
В блоке 220 второй роботизированной системе 120 выдается команда на перемещение второго рабочего органа 124 снаружи ограниченного пространства таким образом, чтобы второй рабочий орган 124 установился над вышеупомянутым местом. При установке второго рабочего органа 124 в этом положении вторая роботизированная система 120 передает, или сообщает, контроллеру 130 робота второй вектор. Второй вектор может включать информацию о положении и/или угловой ориентации.
Таким образом, в контроллер 130 робота переданы два вектора. Первый вектор будет использоваться как система отсчета для первой роботизированной системы 110. Аналогичным образом, второй вектор будет использоваться как система отсчета для второй роботизированной системы 120.
В блоке 230 первая и вторая роботизированные системы 110 и 120 используют первый и второй векторы для перемещения соответственно первого и второго рабочих органов 114 и 124 к новому месту. В этом новом месте первый и второй рабочие органы 114 и 124 оказываются в рабочих положениях, находящихся напротив друг друга, причем первый рабочий орган 114 находится внутри ограниченного пространства, а второй рабочий орган 124 - снаружи ограниченного пространства.
В блоке 240 первый и второй рабочие органы 114 и 124 получают команду на выполнение синхронизированной операции в новом месте. Например, в новом месте может быть выполнена синхронизированная сборочная операция.
Таким образом, с использованием способа, представленного на фиг.2, синхронизированная технологическая операция на конструкции может быть выполнена, даже если первый рабочий орган 114 не виден снаружи ограниченного пространства. Более того, синхронизированная технологическая операция может быть выполнена, даже если роботизированные системы 110 и 120 не имеют единой фиксированной системы отсчета.
Способ, иллюстрируемый фиг.2, может быть реализован автономно. Такая автономная работа может снизить долю ручной сборки или даже полностью исключить ее.
Способ, иллюстрируемый фиг.2, не ограничен получением системы отсчета от одного места. Если конструкция имеет несколько мест выполнения операций, видимых изнутри и снаружи ограниченного пространства, то для создания систем отсчета могут быть использованы два или более места. Пример использования двух мест выполнения операций для созданий систем отсчета приведен ниже.
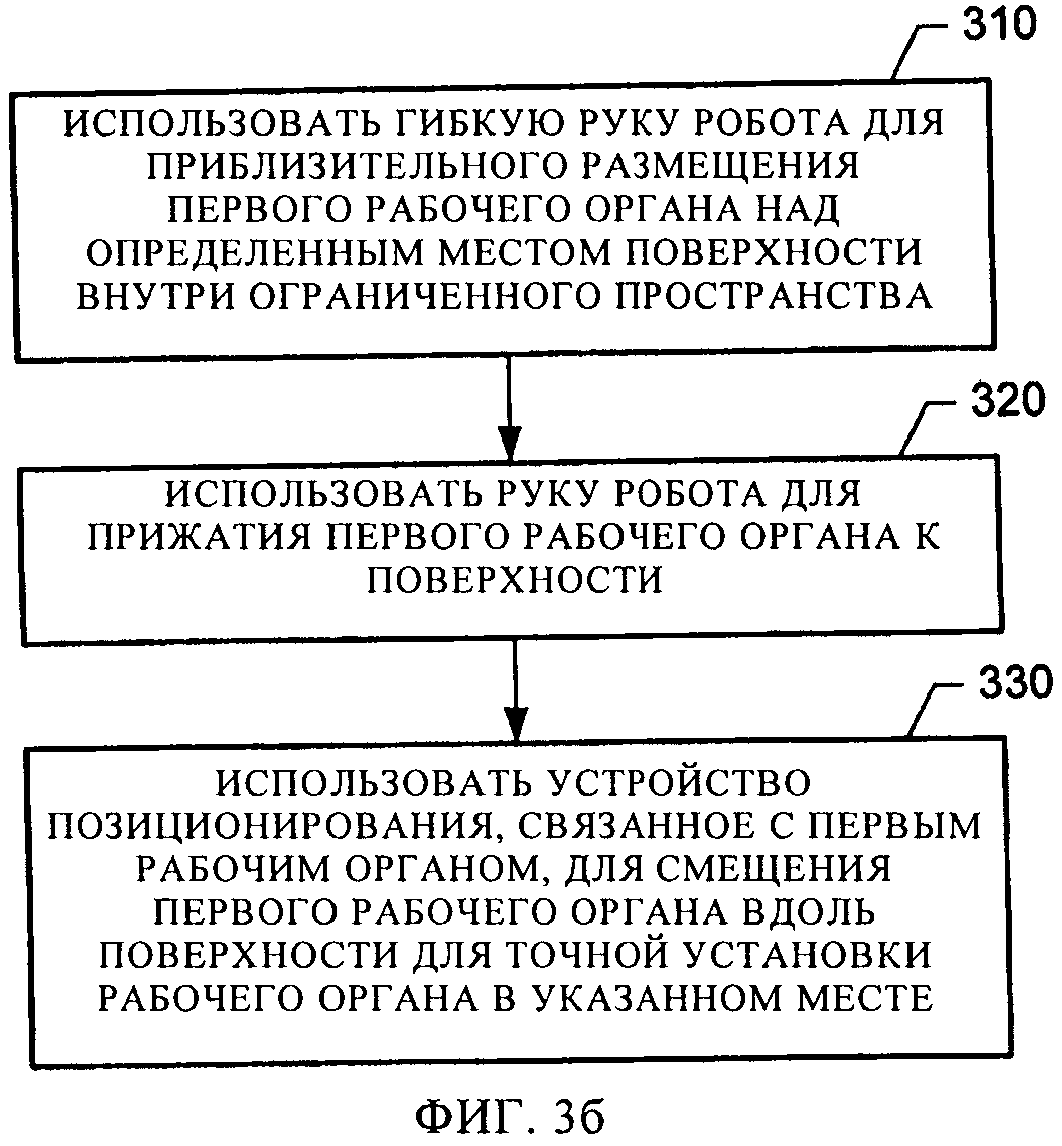
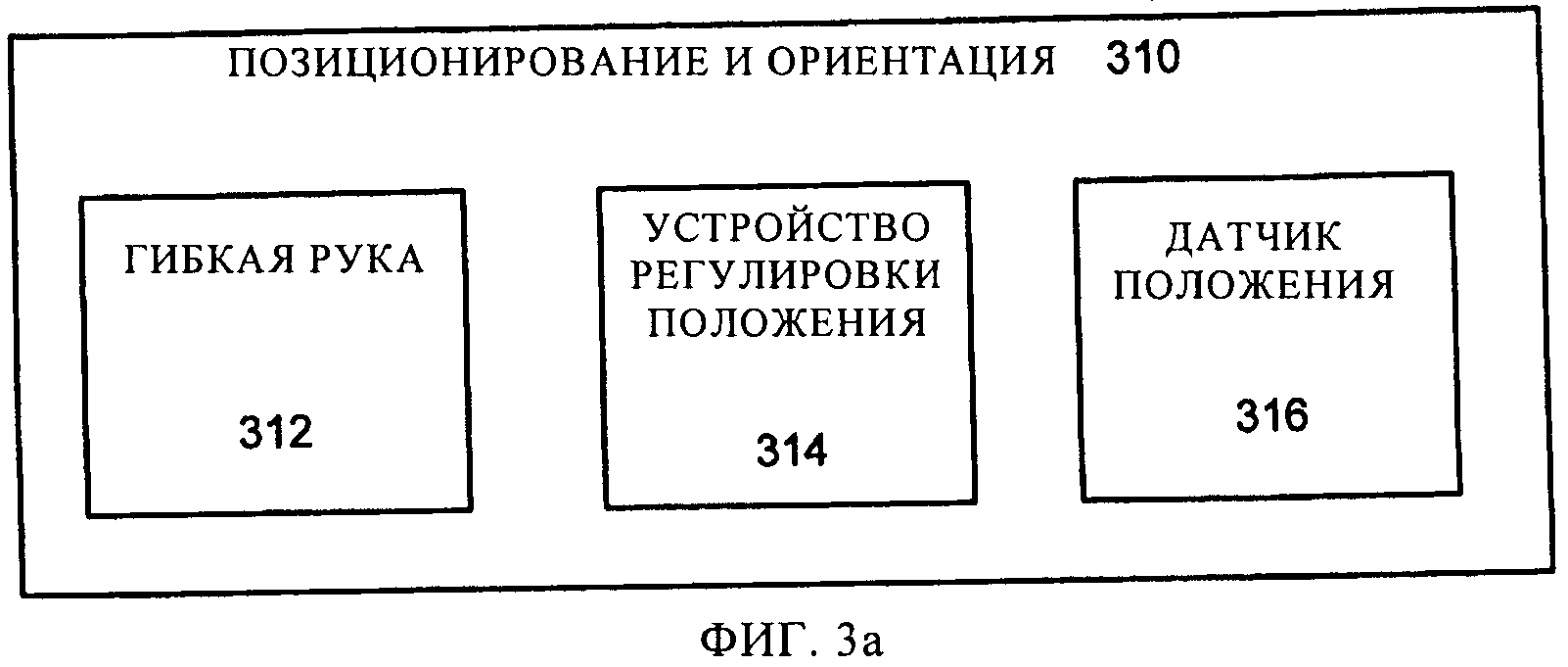
Фиг.3а и 3б иллюстрируют устройство 310 и способ достижения точного позиционирования первого рабочего органа внутри ограниченного пространства. Устройство 310 содержит удлиненную гибкую руку 312 с несколькими степенями свободы. Примером такой руки может служить змееобразное звено. Первый рабочий орган расположен на свободном конце руки 312 робота. Устройство 310 содержит также устройство 314 позиционирования, связанное с первым рабочим органом.
В блоке 310 гибкая рука используется для приблизительного размещения первого рабочего органа над местом поверхности внутри ограниченного пространства. Это размещение является приблизительным из-за подвижности руки.
В блоке 320 рука 312 робота прижимает первый рабочий орган к поверхности. Трение между первым рабочим органом и поверхностью будет предотвращать смещение первого рабочего органа из-за подвижности руки 312 от его положения в системе координат x-y.
В блоке 330 для изменения положения первого рабочего органа относительно поверхности используется устройство 314 позиционирования. Для определения момента, когда первый рабочий орган будет точно установлен в заданном месте, могут использоваться видеоустройство 316 или другой чувствительный элемент или сенсор. На устройство 314 могут подаваться команды на пошаговое смещение первого рабочего органа до тех пор, пока текущее положение первого рабочего органа не совпадет с заданным положением с учетом допустимых отклонений. На устройство 314 позиционирования команды могут подаваться с контроллера 130 робота или с контроллера, встроенного в первую роботизированную систему 110.
Синхронизированная технологическая операция и конструкция не ограничены какими-либо частными вариантами. В качестве одного из примеров может выполняться технологическая операция установки крепежа на конструктивный элемент летательного аппарата, имеющий ограниченное пространство. Конструктивный элемент летательного аппарата, имеющий по меньшей мере одно ограниченное пространство, включает в себя, но не ограничен этим, крыло, оперение, грузовые отсеки и другие отсеки фюзеляжа.
На фиг.4 показан отсек кессона крыла. Кессон крыла включает в себя такие компоненты, как панели 420 обшивки, лонжероны 430 и нервюры (нервюры не показаны). Каждый отсек 410 крыла имеет ограниченное пространство и отверстие 440 доступа (технологический лючок), ведущее в ограниченное пространство. Кессон крыла включает в себя группу отсеков 410.
Способы, представленные на фиг.2 и 3б, могут быть приспособлены для выполнения операций постоянного, т.е. окончательного, в частности неразъемного, крепления, выполняемых на кессоне крыла. В процессе предварительной сборки соединяемые (то есть перекрывающиеся) поверхности деталей кессона крыла (например, лонжеронов, панелей обшивки и нервюр) покрывают герметиком и прижимают друг к другу. Герметик заполняет зазоры между соединяемыми поверхностями для облегчения сверления без заусенцев. Прижатые друг к другу детали кессона крыла могут быть затем скреплены (временно или постоянно) крепежными элементами со шляпками. Крепежные элементы со шляпками могут крепить лонжероны к панелям обшивки, лонжероны к нервюрам и нервюры к панелям обшивки.
В некоторых вариантах выполнения кессон крыла может быть предварительно собран с использованием снабженных приборами крепежных элементов, описанных в заявке на изобретение США №11/756,447 от 31.05.2007, принадлежащей фирме-заявителю по настоящей заявке и включенной в описание путем ссылки. В одном из вариантов выполнения снабженный прибором крепежный элемент содержит один или несколько источников света (например, светодиоды), сконфигурированных таким образом, чтобы создавать световой маячок (ориентир). Информация, относящаяся к таким крепежным элементам (например, номер крепежного элемента), может быть закодирована в излучении маячков.
Эти снабженные приборами крепежные элементы дают для первой роботизированной системы возможность определения положения и ориентации оси, проходящей через место крепежного элемента. Световой маячок обращен вовнутрь и наружу кессона крыла, так что его могут обнаруживать роботизированные системы 110 и 120.
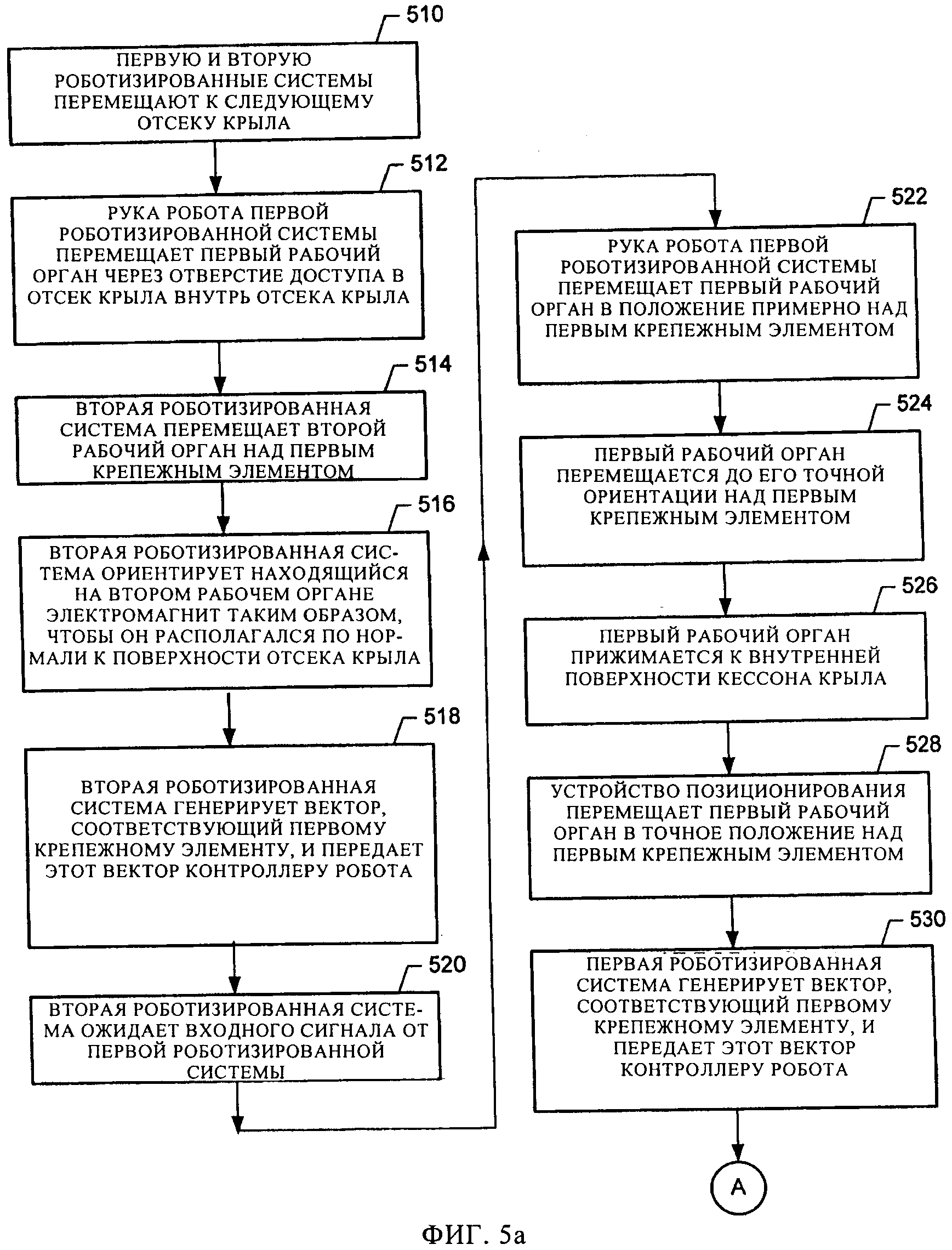
На фиг.5а и 5б иллюстрируется способ выполнения операций постоянного крепления на предварительно собранном кессоне крыла летательного аппарата. Операции крепления будут включать сверление без заусениц отверстий через кессон крыла, введение крепежных элементов в эти отверстия таким образом, чтобы крепежные элементы проходили внутрь кессон крыла, и крепежные гайки подводились к болтам изнутри кессона крыла.
В блоке 510 первую и вторую роботизированные системы перемещают к первому отсеку крыла. В блоке 512 рука робота первой роботизированной системы перемещает первый рабочий орган через отверстие доступа внутрь отсека крыла.
В блоке 514 вторая роботизированная система перемещает второй рабочий орган снаружи кессона крыла до тех пор, пока второй рабочий орган не окажется над первым крепежным элементом. Например, вторая роботизированная система может переместить второй рабочий орган в приблизительное положение, определить смещения ΔX, ΔY (например, с использованием видеосистемы), определить, находятся ли смещения в допустимых пределах, и при необходимости отрегулировать положение второго рабочего органа до тех пор, пока смещения не войдут в пределы допусков. После выполнения действий в блоке 514 второй рабочий орган займет в плане правильное положение относительно первого крепежного элемента.
Предварительно собранный кессон крыла обычно имеет несколько крепежных элементов с широкими шляпками в каждом отсеке крыла. Один из этих крепежных элементов будет идентифицирован как "первый". По первому варианту контроллер робота может быть запрограммирован таким образом, чтобы первый рабочий орган перемещался в определенное место, предпочтительно туда, где должен приблизительно располагаться первый крепежный элемент. По второму варианту для локализации первого крепежного элемента используют видеосистему. По третьему варианту кессон крыла собирают временно с использованием снабженного прибором крепежного элемента, чей маячок содержит код номера крепежного элемента. Проводя декодирование излучения маячка, можно определить, находится ли первый рабочий орган над снабженным прибором крепежным элементом "номер один".
В блоке 516 вторая роботизированная система ориентирует находящийся на втором рабочем органе электромагнит таким образом, чтобы он располагался по нормали к поверхности отсека крыла. Например, вторая роботизированная система может переместить второй рабочий орган в приблизительное положение по углу, определить отклонения по углу ΔA, ΔB, определить, находятся ли отклонения в допустимых пределах, и при необходимости отрегулировать угловое положение второго рабочего органа до тех пор, пока отклонения не войдут в пределы допуска.
Ориентация относительно нормали к поверхности может быть определена с помощью контактного или бесконтактного датчика. Например, датчик может иметь четыре детектора, расположенных по окружности (например, под углами 0°, 90°, 180° и 270°). Каждый детектор измеряет интенсивность излучения маячка. Второй рабочий орган перемещается до тех пор, пока измеренные интенсивности не сравняются, и в этой точке второй рабочий орган окажется центрированным над первым крепежным элементом и расположенным по нормали к поверхности отсека крыла.
В блоке 518 вторая роботизированная система генерирует координаты и параметры ориентации [X1, Y1, A1, B1]2 второго рабочего органа относительно первого крепежного элемента и передает этот вектор контроллеру робота. В блоке 520 вторая роботизированная система затем ожидает входной сигнал от первой роботизированной системы.
В блоке 522 рука робота первой роботизированной системы перемещает первый рабочий орган в положение примерно над первым крепежным элементом с широкой шляпкой. Например, первая роботизированная система может переместить первый рабочий орган в приблизительное положение, определить смещения ΔX, ΔY относительно первого крепежного элемента (например, с использованием видеосистемы), определить, находятся ли смещения в пределах допуска на приблизительное позиционирование, и при необходимости отрегулировать положение первого рабочего органа до тех пор, пока смещения не войдут в пределы допуска на приблизительное позиционирование.
В блоке 524 первый рабочий орган перемещается до его точной ориентации над первым крепежным элементом с широкой шляпкой. Например, первый рабочий орган перемещается до его точной ориентации по углу. Для определения отклонений в ориентации ΔA, ΔB, ΔC используются внутренние датчики или датчики положения. Отклонения в ориентации сравниваются с допуском, и ориентация затем регулируется до тех пор, пока отклонения в ориентации не войдут в пределы допуска.
В блоке 526 первая роботизированная система прижимает первый рабочий орган к внутренней поверхности кессона крыла. Трение с поверхностью предотвратит смещение первого рабочего органа из заданного положения, которое может произойти из-за подвижности руки робота.
В блоке 528 устройство позиционирования, связанное с первым рабочим органом, перемещает первый рабочий орган в точное положение над первым крепежным элементом с широкой шляпкой. Например, первая роботизированная система может определить смещения ΔX, ΔY относительно первого крепежного элемента с широкой шляпкой (например, с использованием видеосистемы), определить, находятся ли смещения в допустимых пределах на точное положение, и при необходимости выдать команду устройству на изменение положения первого рабочего органа до тех пор, пока смещения не войдут в пределы допуска на точное положение.
В блоке 530 первая роботизированная система генерирует координаты положения и параметры ориентации [X1, Y1, A1, B1, C1]1 первого рабочего органа относительно первого крепежного элемента с широкой шляпкой. Этот вектор передается в контроллер робота.
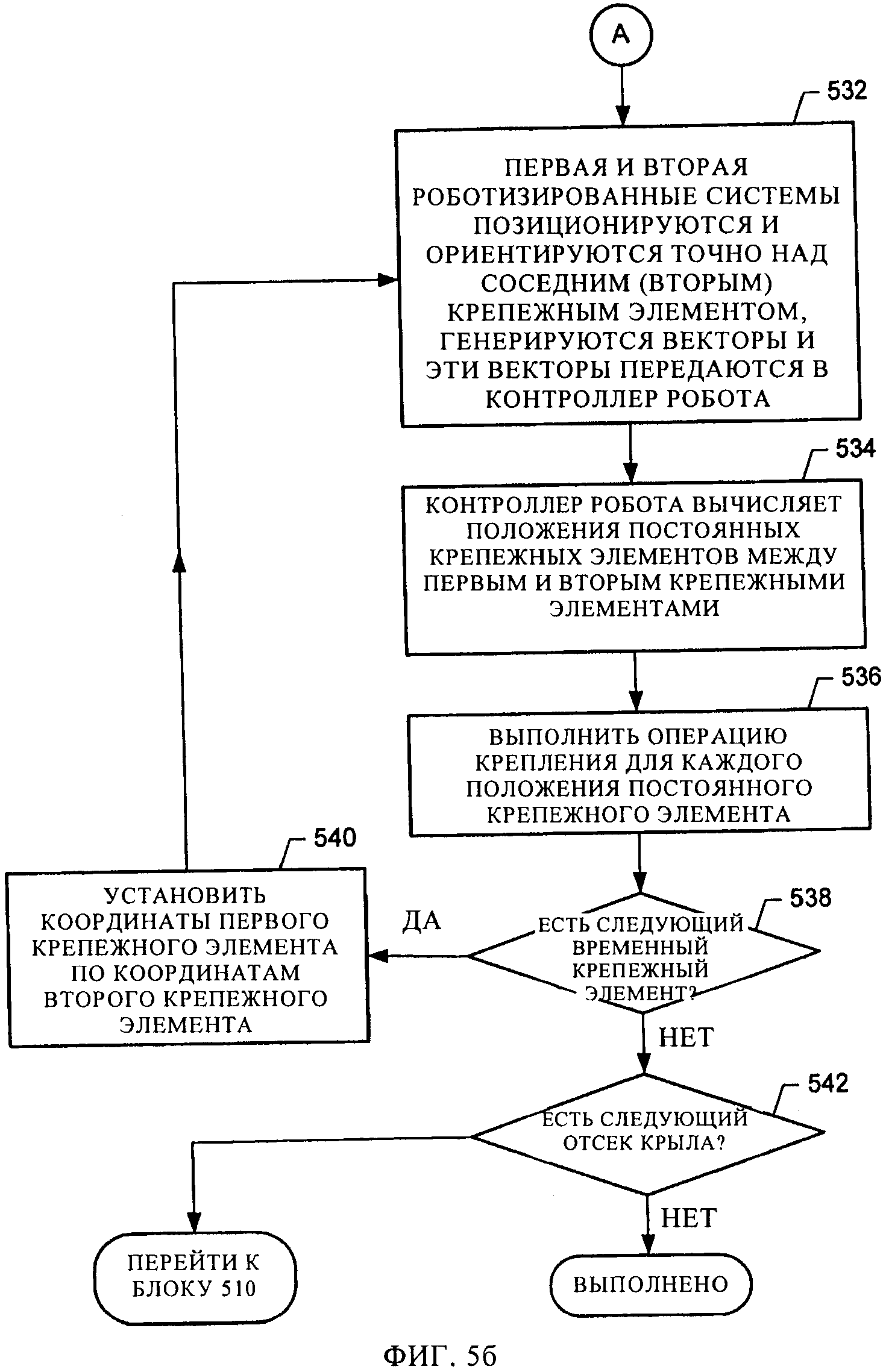
В блоке 532 первая и вторая роботизированные системы позиционируются и ориентируются точно над соседним (вторым) крепежным элементом, генерируют векторы [X2, Y2, A2, B2, C2]1 и [X2, Y2, A2, B2]2 для второго крепежного элемента с широкой шляпкой и передают их в контроллер робота. Здесь могут быть повторены действия, реализуемые в блоках 514-530, с тем отличием, что они выполняются для второго крепежного элемента.
В блоке 534 контроллер робота вычисляет положения постоянных крепежных элементов между первым и вторым крепежными элементами. На фиг.6 показаны положения постоянных крепежных элементов (изображенные крестами), размещенные в линию и на равных расстояниях друг от друга между первым и вторым крепежными элементами TF1 и TF2. Однако распределение положений постоянных крепежных элементов не имеет ограничений. Например, положения постоянных крепежных элементов могут распределяться по кривой, проходящей между первым и вторым крепежными элементами TF1 и TF2.
В блоке 536 выполняется технологическая операция крепления для каждого положения постоянного крепежного элемента. Пример такой операции проиллюстрирован на фиг.7. Однако способ, приведенный на фиг.5, не ограничен такой операцией крепления. Другие крепежные операции включают в себя, в частности, установку заклепок.
В блоках 538-540 после выполнения последней операции постоянного крепления координаты первого крепежного элемента устанавливаются по координатам второго крепежного элемента. То есть,
[X1, Y1, A1, B1, C1]1 = [X2, Y2, A2, B2, C2]1; и
[X1, Y1, A1, B1] = [X2, Y2, A2, B2]2.
Затем управление возвращается в блок 532.
После выполнения последней операции постоянного закрепления в этом отсеке крыла управление возвращается в блок 510, в результате чего первое и второе роботизированные устройства перемещаются и выполняют операции постоянного закрепления в следующем отсеке крыла. Выполнение способа продолжается (блок 542) до тех пор, пока операции крепления не будут выполнены в каждом отсеке кессона крыла.
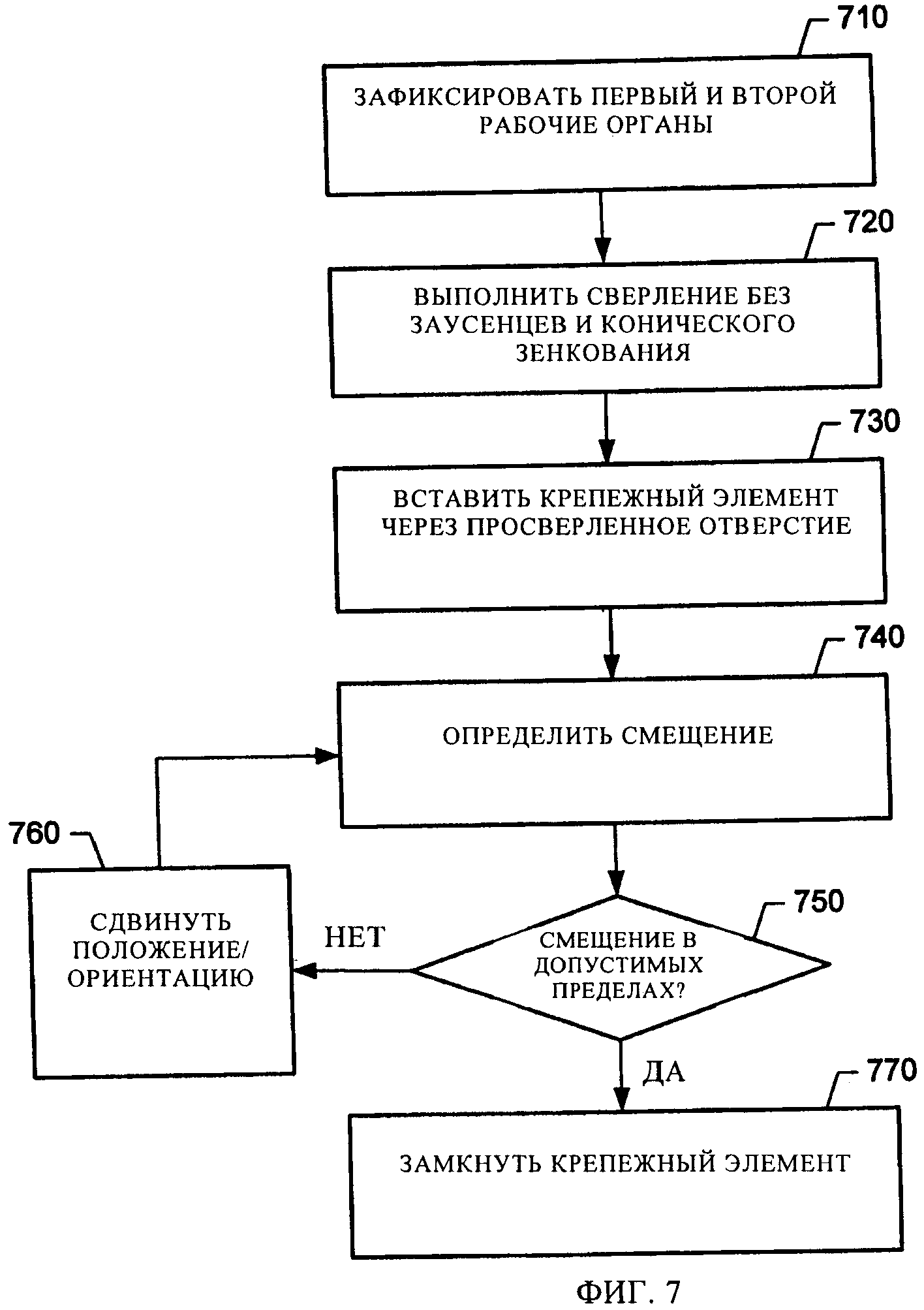
На фиг.7 проиллюстрирован пример выполнения технологической операции крепления, выполняемой первой и второй роботизированными системами. Технологическая операция крепления включает в себя фиксацию первого и второго рабочих органов на соответствующих поверхностях (блок 710). Это может быть выполнено, например, путем включения электромагнита, установленного на втором рабочем органе, который за счет магнитных сил притягивает стальную пластину, установленную на первом рабочем органе (магнитный поток от электромагнита проходит сквозь соединяемые друг с другом детали).
Сила прижима выдавливает клейкий герметик и убирает зазор между соединяемыми поверхностями деталей. За счет этого облегчается сверление без заусенцев, выполняемое вторым рабочим органом в блоке 720. Второй рабочий орган может в блоке 720 также выполнять коническое зенкование. В блоке 730 второй рабочий орган вставляет крепежный элемент через просверленное отверстие.
В блоке 740 определяется положение первого рабочего органа относительно вставленного болта. Если смещение выходит за пределы допуска (блок 750), используется устройство позиционирования, установленный на конце первого рабочего органа, для смещения положения и/или изменения ориентации первого рабочего органа (блок 760). Для обеспечения возможности регулировки положения сила магнитного сцепления между первым и вторым рабочими органами может быть уменьшена.
В блоке 770 первый рабочий орган выполняет замыкание крепежного элемента. Например, первый рабочий орган устанавливает на крепежный элемент втулку и гайку.
На фиг.8 показано, что в других вариантах выполнения вторая роботизированная система 820 может иметь такую же конфигурацию, что и первая роботизированная система 810, и выполнять те же функции. Например, первая и вторая роботизированные системы 810 и 820 могут включать гибкие руки 812 и 822, предназначенные для перемещения первого и второго рабочих органов 814 и 824 в соседних отсеках и выполнения крепежных операций на верхней или нижней половине RU и RL нервюры или другого конструктивного элемента. Конечно, эти другие варианты не ограничены выполнением работ в отсеках кессона крыла и могут быть применены для выполнения синхронизированных операций в других ограниченных пространствах.
Представленная в данном изобретении система не ограничена использованием руки робота для позиционирования рабочего органа в ограниченном пространстве. Например, вместо руки робота для позиционирования рабочего органа в ограниченном пространстве может быть использован ползающий аппарат, в частности на гусеничном ходу.
Представленный в данном изобретении способ не ограничен операцией крепления. Представленный способ может быть использован для выполнения других операций на летательном аппарате. Примеры таких операций включают, но не ограничиваются этим, нанесение герметика, очистку, покраску и проведение контроля внутри ограниченного пространства.
Представленный способ не ограничен синхронизированными технологическими операциями на летательном аппарате. Например, представленный в изобретении способ может быть использован для выполнения синхронизированных операций на контейнерах, автомобилях, фурах, водных судах и других конструкциях, имеющих ограниченные пространства.
Что касается летательного аппарата, то представленный способ не ограничен этапом сборки. Представленный способ может быть использован на других стадиях изготовления и эксплуатации летательного аппарата.
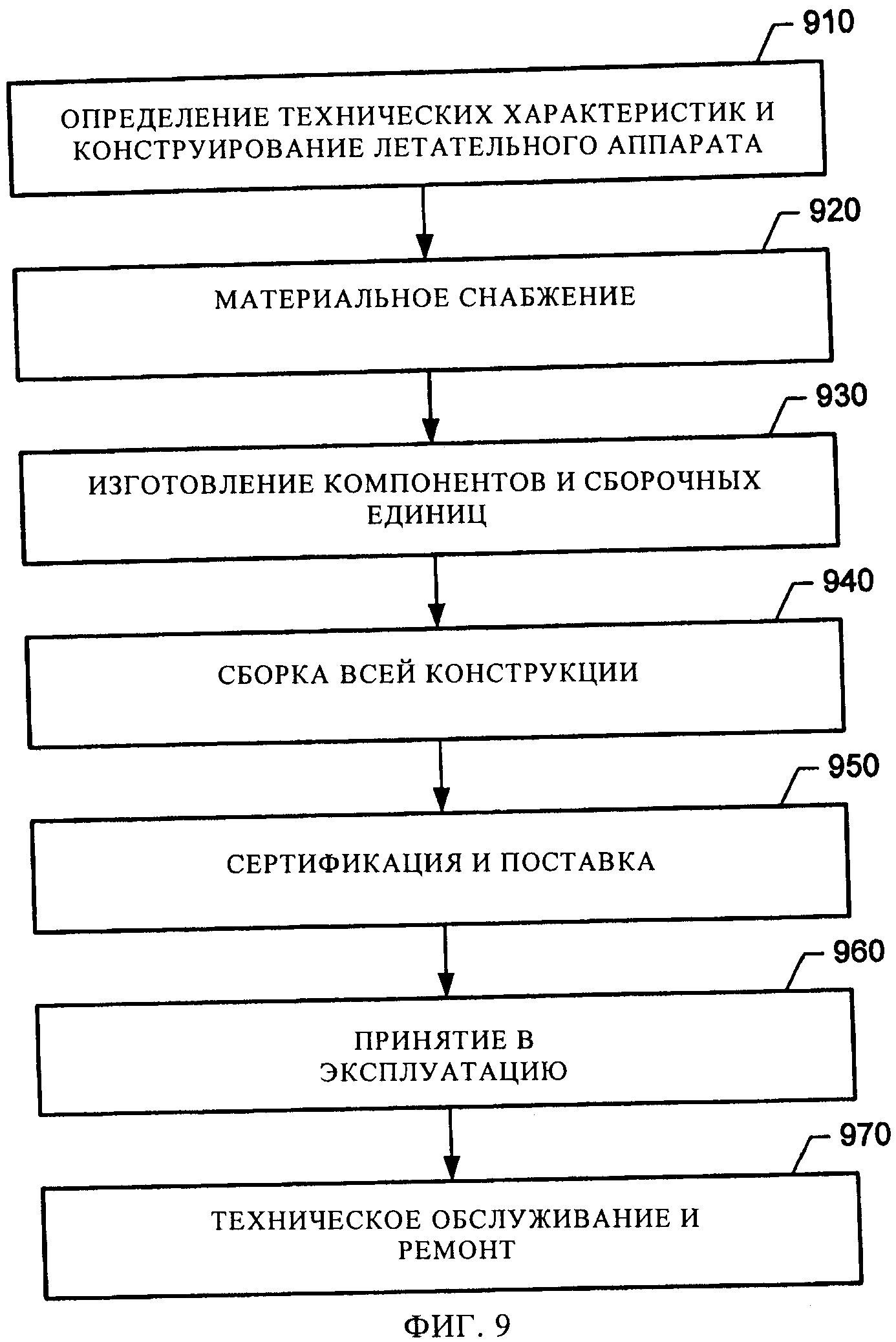
На фиг.9 представлен вариант способа изготовления и эксплуатации летательного аппарата. На этапе подготовки к серийному производству способ может включать определение технических характеристик и конструирование летательного аппарата (блок 910) и материальное снабжение (блок 920). На этапе изготовления производится изготовление компонентов и сборочных единиц (блок 930) и сборка всей конструкции (блок 940) летательного аппарата. После чего летательный аппарат проходит сертификацию и приемку (блок 950) и поступает в эксплуатацию (блок 960). В процессе эксплуатации владельцем летательного аппарата проводятся регламентные работы и обслуживание (блок 970).
Каждая из операций способа может быть выполнена или проведена фирмой, занимающейся системной интеграцией, третьим лицом и/или самим пользователем летательного аппарата. Для полноты описания можно сказать, что в фирму, занимающуюся системной интеграцией, может без ограничения входить некоторое число производителей летательных аппаратов и основной контрагент по системе, третье лицо может включать без ограничений некоторое число распространителей, субподрядчиков и снабженческих фирм, и пользователем летательного аппарата может быть авиапредприятие, лизинговая компания, военное подразделение, организация технического обслуживания и т.д.
Представленные в данном изобретении варианты выполнения могут быть использованы на любой одной или на нескольких этапах изготовления и эксплуатации. Например, компоненты или компоновочные узлы, изготовление которых соответствует операции, отражаемой блоком 930, могут изготавливаться аналогичным образом, что и компоненты или компоновочные узлы, изготавливаемые в процесс эксплуатации летательного аппарата. Кроме того, один или несколько вариантов выполнения устройства, варианты реализации способа или их комбинация могут быть использованы на этапах изготовления, отображенных блоками 930 и 940, например, для существенного ускорения сборки летательного аппарата или для снижения его стоимости. Аналогичным образом, один или несколько из представленных вариантов выполнения могут быть использованы при эксплуатации летательного аппарата, например, но не ограничиваясь этим, для технического обслуживания и ремонта, отображенных блоком 970.
Способ и система управления работой устройства с использованием комплексного моделирования с возможностью временного сдвига
Самоудерживающаяся ячеистая теплозвукоизоляция
Концевые крылышки, содержащие поверхности с углублением, и соответствующие системы и способы
Система и способ для формирования подкрепляющего элемента за одно целое с многослойным металловолокнистым листом
Регистрация удара молнии
Способ и аппарат для формования, и соответствующая им предварительно отформованная заготовка со средой для гидростатического прессования
Низкопрофильный гаечный ключ
Упрочненная структура титанового сплава для применения в зубчатых колесах трансмиссий
Формование для получения одинаковых характеристик листов, аппарат для сварки трением с перемешиванием с использованием охлаждающего элемента
Обдуваемая выхлопными газами конструкция и связанный с ней составной узел, и способ изготовления этого узла
Способ и система управления работой устройства с использованием комплексного моделирования с возможностью временного сдвига
Самоудерживающаяся ячеистая теплозвукоизоляция
Концевые крылышки, содержащие поверхности с углублением, и соответствующие системы и способы
Система и способ для формирования подкрепляющего элемента за одно целое с многослойным металловолокнистым листом
Регистрация удара молнии
Способ и аппарат для формования, и соответствующая им предварительно отформованная заготовка со средой для гидростатического прессования
Низкопрофильный гаечный ключ
Упрочненная структура титанового сплава для применения в зубчатых колесах трансмиссий
Формование для получения одинаковых характеристик листов, аппарат для сварки трением с перемешиванием с использованием охлаждающего элемента
Обдуваемая выхлопными газами конструкция и связанный с ней составной узел, и способ изготовления этого узла

