Результат интеллектуальной деятельности: ТЕХНОЛОГИЧЕСКАЯ МАШИНА С РАБОЧИМ ИНСТРУМЕНТОМ В ВИДЕ ПИЛЬНОГО ПОЛОТНА
Вид РИД
Изобретение
Настоящее изобретение относится к технологической машине с рабочим инструментом в виде пильного полотна, прежде всего к ручной машине, согласно ограничительной части пункта 1 формулы изобретения.
Известно, что для работы с технологическими машинами этого типа, которые нашли широкое применение на практике в виде лобзиковых пил, а также циркулярных пил, применяют вспомогательные устройства, которые облегчают следование по желательной рабочей траектории, которая зачастую только недостаточно просматривается из-за того, что она закрыта машиной. Для этого ведение технологической машины осуществляется с ориентацией по соответствующей заданной траектории обработки, которая проходит со смещением в сторону от рабочей траектории и путем ориентации по которой облегчается точная работа вдоль рабочей траектории. При этом в качестве вспомогательного устройства предусмотрен направляющий башмак, закрепляемый консольно сбоку машины, который установлен на регулируемой по отношению к технологической машине консоли и точно выдерживает линию своего движения вдоль заданной траектории обработки, параллельной рабочей траектории, при его скольжении в направлении работы технологической машины, причем в качестве заданной траектории обработки может выступать, например, кромка заготовки, параллельная желательной рабочей траектории.
Помимо того, что такие вспомогательные устройства являются механически сложными и имеют ограниченные возможности применения, для их настройки и регулировки требуется проведение соответствующих подготовительных операций, а также частично требуется дополнительная установка планок или подобных средств в качестве заданной траектории обработки в случае, если в результате производимых работ еще не был получен соответствующий эталонный контур, соответствующий рабочей траектории, который можно было бы использовать в качестве заданной траектории обработки. Если же такой контур уже существует, то зачастую в таком виде, который по меньшей мере затрудняет непосредственное его использование в качестве эталонного контура при применении известных вспомогательных устройств.
В основу изобретения была положена задача создания для пользователя улучшенных возможностей по ведению технологической машины с ориентацией по такой заданной траектории обработки, смещенной относительно рабочей траектории рабочего инструмента технологической машины, а также обеспечения активной помощи пользователю в ведении технологической машины с ориентацией по заданной траектории обработки, смещенной в сторону относительно рабочего инструмента.
В соответствии с изобретением эта задача решается признаками пунктов 1 и 10 формулы. В зависимых пунктах формулы приведены целесообразные варианты осуществления изобретения.
Объектом изобретения является технологическая машина с рабочим инструментом в виде пильного полотна, прежде всего ручная машина, имеющая рабочую зону для рабочего инструмента, предназначенного для обработки заготовки, и содержащая вспомогательное устройство для ведения рабочего инструмента вдоль рабочей траектории, которое включает в себя сенсорное устройство, имеющее зону регистрации, находящуюся у края рабочей зоны рабочего инструмента. В предлагаемой в изобретении технологической машине сенсорное устройство содержит камеру, направленную на зону регистрации, а вспомогательное устройство выполнено с возможностью выравнивания рабочего инструмента по рабочей траектории с учетом ее смещения относительно заданной траектории обработки. По меньшей мере заданная траектория обработки имеет участок, попадающий в зону регистрации.
Улучшенные возможности в плане ведения технологической машины вдоль находящейся со сдвигом относительно заданной траектории обработки рабочей траектории являются следствием того, что согласно изобретению в качестве вспомогательного устройства предусмотрено сенсорное устройство, имеющее зону регистрации, которая находится у края рабочей зоны рабочего инструмента и в которую попадает своим участком заданная траектория обработки, так что исходя из значений параметров (координат) заданной траектории обработки, регистрируемых сенсорным устройством, технологическая машина следует по своей траектории за счет соответствующего придания направления рабочему инструменту с выравниванием по рабочей траектории. Таким образом, непосредственное, окончательное направление технологической машины не является задачей пользователя, который осуществляет по существу только подачу технологической машины, т.е. обеспечивает ей соответствующую поддержку.
Изобретение одновременно, при соответствующей визуализации условий и значений параметров, регистрируемых сенсорным устройством, будь то в зоне регистрации или в другом месте, прежде всего на корпусе машины, дает возможность контроля процесса работы, и это также относится к следованию по рабочей траектории, когда она - что особенно целесообразно в рамках настоящего изобретения - также попадает в пределы зоны регистрации. Такие условия имеются, в частности, при часто встречающихся в практике критичных по качеству работах, когда уже существующие контуры, например обводы встраиваемой детали, к примеру кухонной мойки, определяют рабочие траектории, которые проходят параллельно этим обводам со сдвигом относительно них и по которым необходимо выполнить выпиливание.
Соответственно, в варианте выполнения технологической машины в виде лобзиковой пилы с рабочим инструментом в виде пильного полотна, поворачиваемым вокруг оси вращения, проходящей в его продольном направлении, которое направляется вдоль рабочей траектории посредством исполнительного механизма средств управления, включающих в себя, в частности, сенсорное устройство, также получается решение, имеющее особенно важное значение на практике, поскольку лобзиковая пила в такой конфигурации представляет собой машину с полуавтономным (полуавтоматическим) режимом ведения, используя которую, даже неопытный пользователь может получить хорошие результаты работы.
В предлагаемом решении заданную траекторию обработки можно обеспечить при помощи как оптической, так и механической разметки, например при помощи направленного луча, а также при помощи линии, положение которой относительно зоны регистрации может отслеживаться с достаточной точностью, причем очертания зоны регистрации визуализируются оптически и/или механически, например, посредством ограничений по кромкам выреза. Помимо этого, изобретение дает также хорошие предпосылки для визуализации возможных критичных отклонений технологической машины от заданной траектории обработки и/или рабочего инструмента от рабочей траектории, при необходимости также с соответствующим взвешиванием, при помощи средства индикации, так что облегченное для пользователя ведение технологической машины сочетается с хорошими возможностями контроля результатов работы, а также состояния самой технологической машины, поскольку в совокупности с визуализацией факторов, определяющих результаты работы, также возможна и целесообразна визуализация относящейся к машине информации.
Таким образом, объектом изобретения также является способ управления работой технологической машины, прежде всего ручной машины, предпочтительно выполненной в виде лобзиковой пилы, при осуществлении которого от пользователя требуется только удерживать технологическую машину с ориентацией по заданной траектории обработки, а уже сам рабочий инструмент выполняет ведение и выравнивание технологической машины по рабочей траектории, смещенной относительно заданной траектории обработки, и притом с полезными возможностями визуализации относящихся к рабочему процессу условий, а также, в частности, указаний на отклонения от нормального режима работы и на опасности, посредством как визуальных, так и звуковых сигналов.
При этом величину смещения пользователь может устанавливать в определенных пределах произвольно.
Объектом изобретения является также способ управления обработкой заготовки с использованием технологической машины, прежде всего ручной машины, характеризующийся тем, что удерживаемую пользователем технологическую машину ведут с ориентацией по заданной траектории обработки, направляя рабочий инструмент вдоль рабочей траектории, смещенной относительно заданной траектории обработки, и визуализируют пользователю положение заданной траектории обработки и/или рабочей траектории в зоне регистрации сенсорного устройства, направленного на рабочую зону рабочего инструмента.
Другие конструктивные элементы и признаки изобретения раскрыты в формуле изобретения. Изобретение более подробно поясняется в приведенном ниже описании варианта его осуществления со ссылками на чертежи, на которых показано:
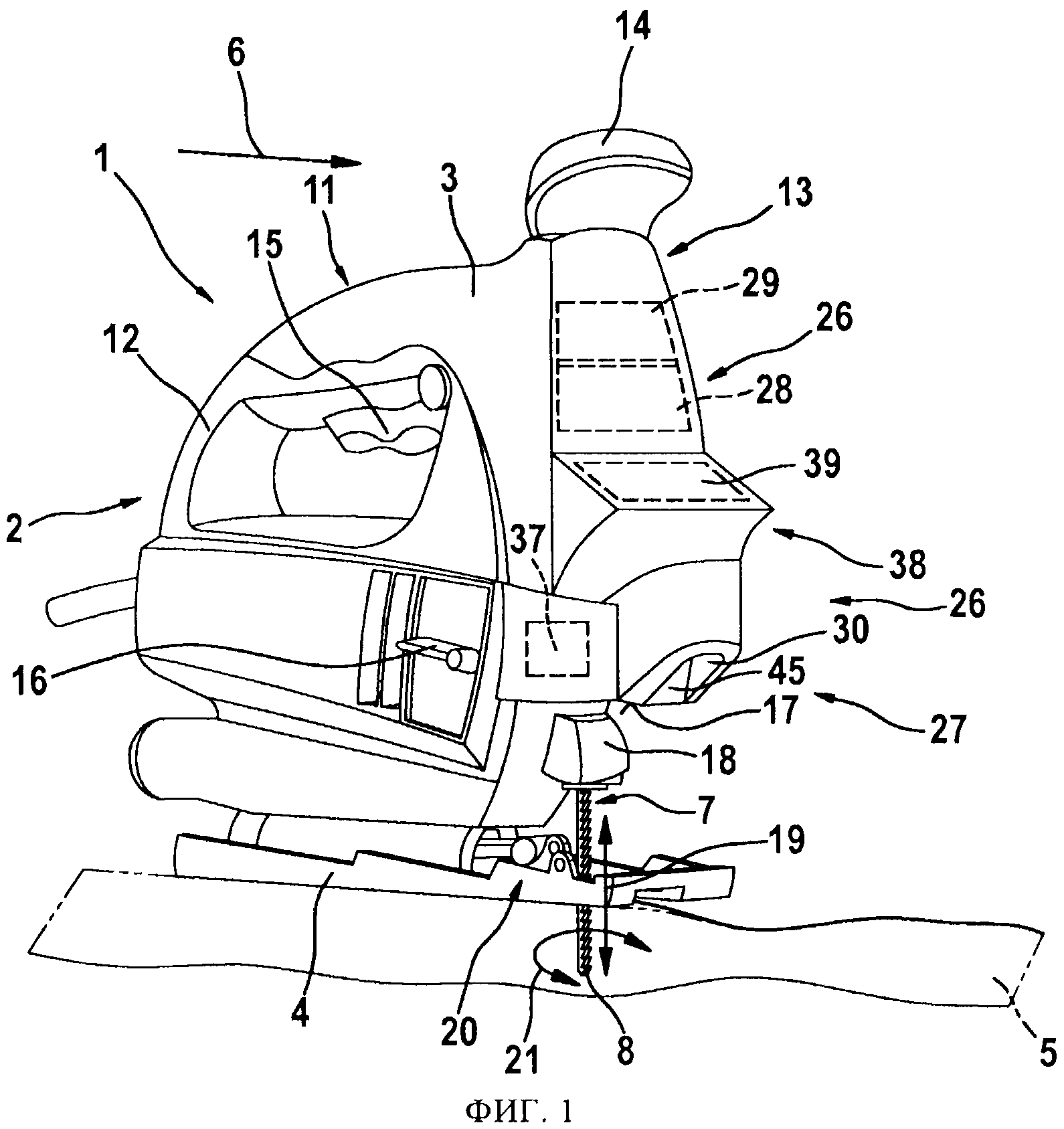
на фиг.1 - перспективное изображение лобзиковой пилы, приведенной в качестве примера предлагаемой технологической машины, которая, являясь лобзиковой пилой, работающей в полуавтономном режиме, имеет пильное полотно, поворачиваемое вокруг его продольной оси и регулируемое по угловому положению с помощью исполнительного органа, причем лобзиковая пила изображена в своем рабочем положении, в котором она приставлена к заготовке,
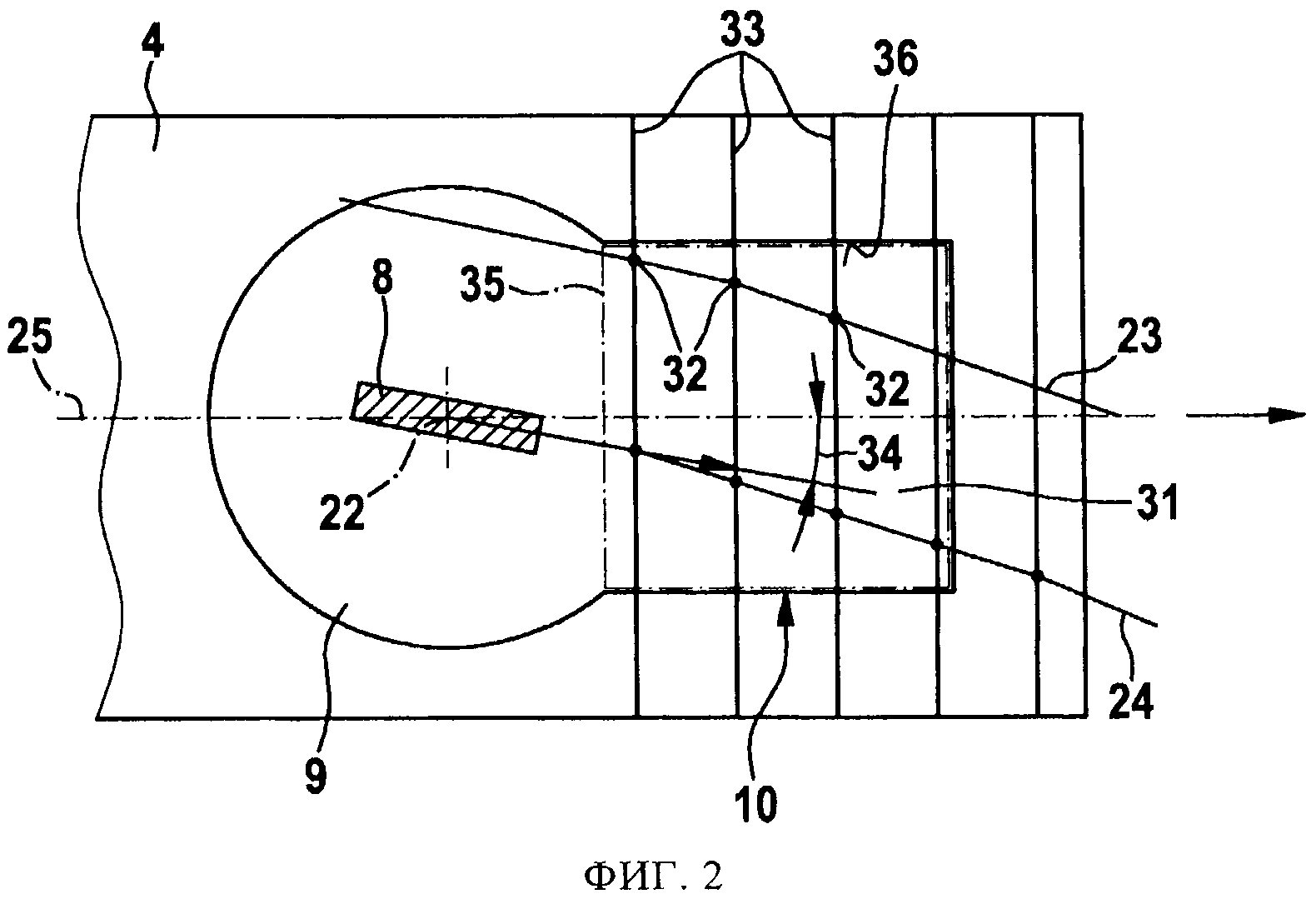
на фиг.2 - схематический вид сверху рабочей зоны опорной плиты лобзиковой пилы, через которую проходит пильное полотно, где показаны заданная траектория обработки и проходящая со смещением, т.е. сдвинутая, относительно нее, рабочая траектория,
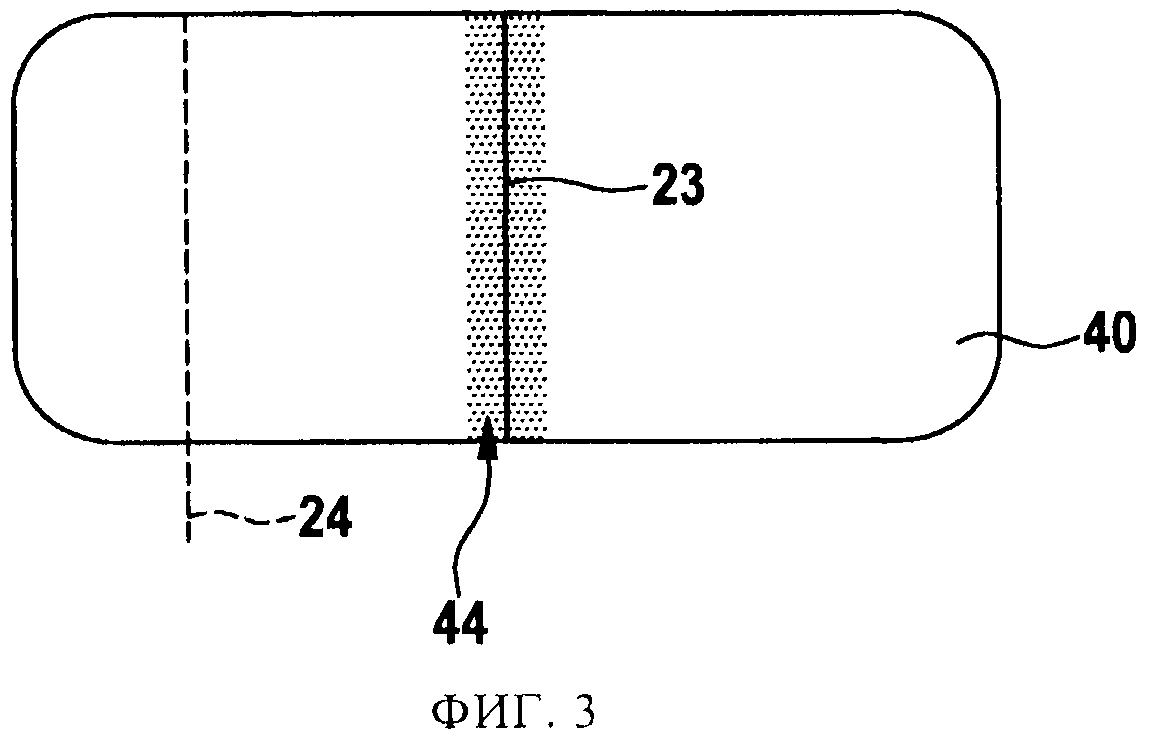
на фиг.3 - схематическое изображение контролируемой датчиком зоны, используемой в качестве зоны регистрации.
На фиг.1 в качестве примера ручной машины 1 изображена пила с возвратно-поступательным движением пильного полотна, а именно лобзиковая пила 2, имеющая корпус 3 и опирающаяся своей опорной плитой 4, также называемой подошвой, на заготовку 5.
В передней - по направлению работы - области лобзиковой пилы 2 в качестве рабочего инструмента 7 установлено пильное полотно 8. Во время работы пильное полотно врезается в заготовку 5, на которую лобзиковая пила 2 установлена посредством опорной плиты 4 с возможностью подачи лобзиковой пилы.
Лобзиковая пила 2 имеет поле 10 обзора, предусмотренное для пользователя, предпочтительно проходящее по меньшей мере по поверхности рабочей зоны 9, определяемой пильным полотном 8, и, как правило, как это показано на чертеже, выходящее за пределы этой рабочей зоны, в частности, в направлении 6 работы, чтобы предоставлять пользователю наилучшие возможности наблюдения за рабочей обстановкой перед рабочим инструментом.
Корпус 3 лобзиковой пилы 2 выполнен в основном по традиционной схеме и с противоположной, глядя в вертикальном направлении, опорной плите 4, переставляемой поворотом вокруг проходящей в направлении продольной оси лобзиковой пилы 2 оси наклона и фиксируемой в выбранном положении, стороны имеет скобообразную рукоятку 11, скоба 12 которой вытянута в направлении 6 работы и спереди переходит в торцевую часть 13 корпуса 3. Вверху рукоятка переходит в направляющий наконечник 14.
В области рукоятки 11 предусмотрен выключатель 15, который вмонтирован снизу в скобу 12 рукоятки и посредством которого технологическая машина 1 включается и выключается. Различные режимы работы лобзиковой пилы 2 устанавливаются с помощью расположенного сбоку на корпусе 3 переключателя 16.
Торцевая часть 13 корпуса 3 обрывается вниз, т.е. нисходя к опорной плите 4, уступом, обращенным в направлении 6 работы. Образованный таким образом уступ 17 нависает над держателем (зажимом) 18 для пильного полотна 8.
Пильное полотно 8 технологической машины 1, имеющей электропривод, приводится в возвратно-поступательное движение вверх-вниз, как показано стрелкой 19. Исполнительный привод 20 служит для реализации другого режима работы пильного полотна 8, а именно режима маятникового хода, при котором к возвратно-поступательному движению пильного полотна 8 вверх-вниз добавляется возможность качания вокруг оси качания (не показана), проходящей поперек плоскости пильного полотна.
В третьем режиме работы, иллюстрируемом стрелкой 21, пильное полотно 8, дополнительно к возвратно-поступательному движению вверх-вниз, может поворачиваться вокруг оси 22 вращения, проходящей в направлении его продольной оси. Благодаря этому существует возможность регулирования положения пильного полотна 8, как показано на фиг.2, путем его перевода из его прямолинейного положения (прямого направления работы), соответствующего нулевому углу к продольной оси 25 лобзиковой пилы 2, в положения, соответствующие направлениям работы под углом. В результате этого лобзиковая пила 2 будет работать в так называемом режиме "подруливания" (scrolling), а при соответствующем управлении перестановкой пильного полотна, т.е. при соответствующем регулировании углового положения пильного полотна, лобзиковая пила 2 сможет работать в полуавтономном (полуавтоматическом) режиме. При этом пользователю, держащему в руке лобзиковую пилу 2, по существу нужно лишь осуществлять подачу лобзиковой пилы, приблизительно выдерживая направление 6 работы. Точное же, выровненное по рабочей траектории 24 и соответствующее ей позиционирование лобзиковой пилы 2 осуществляется путем регулирования углового положения пильного полотна 8.
На фиг.2 рабочая траектория 24 показана тонкой линией. Рабочая траектория 24, применительно к показанной рабочей ситуации, имеет точку пересечения с осью 22 вращения, через которую также проходит показанная продольная ось 25 лобзиковой пилы 2. Начиная от оси 22 вращения пильного полотна, принятая рабочая траектория 24 проходит в направлении 6 работы с постепенно возрастающим боковым смещением от продольной оси 25.
Работа вдоль рабочей траектории 24 осуществляется с ориентацией по заданной траектории 23 обработки, представленной на фиг.3 толстой линией. Это соответствует рабочей ситуации, при которой по рабочей траектории 24 выпиливается заданный контур с соответствующим смещением относительно заданной траектории 23 обработки, т.е. сдвинутый относительно него.
Для регистрации такой рабочей обстановки служат средства 26 управления, которые включают в себя, среди прочего, сенсорное устройство 27, вычислительный блок 28 и исполнительный привод 29. При помощи средств 26 управления угловое положение пильного полотна 8 регулируется таким образом, чтобы пильное полотно выравнивалось по рабочей траектории 24 и находилось под нулевым углом к ней. В этом варианте выполнения лобзиковая пила 2 имеет режим "подруливания", в котором она работает в качестве полуавтономной лобзиковой пилы. При этом пользователь выполняет по существу только подачу и поддержку лобзиковой пилы 2.
В иллюстрируемом варианте выполнения сенсорное устройство 27 содержит выполненный в виде камеры 30 датчик, к которому подключен вычислительный блок 28. Камера 30 сенсорного устройства 27 направлена на зону 31 регистрации, находящуюся в области опорной плиты 4, которая соответствует контролируемой датчиком зоне или находится по меньшей мере внутри нее. На проиллюстрированном виде сверху внутри зоны 31 регистрации проходит заданная траектория 23 обработки, со смещением от которого проходит рабочая траектория 24, по которой и предстоит вести обработку (пропил).
При помощи сенсорного устройства 27 с направленной на зону 31 регистрации камерой 30, используемой в качестве датчика, происходит регистрация заданной траектории 23 обработки в отдельных точках 32, которые лежат в рядах 33 поиска, проходящих поперек направления 6 работы и перекрывающих зону 31 регистрации. В результате этого, как при аналоговой, так и при цифровой обработке изображений данные, регистрируемые сенсорным устройством 27, могут передаваться в вычислительный блок 28, где происходит распознавание поведения заданной траектории 23 обработки, а соответственно, и характера изменения ее направления относительно продольной оси 25.
С учетом заданного параллельного смещения между заданной траекторией 23 обработки и рабочей траекторией 24, как дополнительного параметра, вычислительный блок 28 преобразует регистрируемые данные в управляющие сигналы и передает их в блок управления 29, который посредством исполнительного органа с регулятором, например в виде шагового электродвигателя, регулирует угловое 34 положение пильного полотна в зависимости от ведения лобзиковой пилы пользователем. Угловое положение 34 пильного полотна характеризуется углом установки пильного полотна 8 относительно продольной оси 25.
В изображенном на фиг.2 варианте осуществления изобретения зона 31 регистрации ограничена штрихпунктирной линией 35, совпадающей с кромками имеющегося в опорной плите 4 выреза 36, в результате чего в рассматриваемом варианте осуществления изобретения зона 31 регистрации ограничена и визуализируется механически кромками этого выреза 36. Зона 31 регистрации расположена симметрично относительно продольной оси 25, на которой находится ось 22 вращения пильного полотна 8, которое при совпадении рабочей траектории 24 с продольной осью 25 лобзиковой пилы проходит своей плоскостью в направлении продольной оси 25.
Также зоной 31 регистрации ограничена область, которая в рассматриваемом варианте осуществления изобретения представляет собой область примерно по 1 см по обе стороны от продольной оси 25, в которой ведение лобзиковой пилы 2 с учетом регистрируемых датчиком значений происходит в полуавтономном режиме - если такой режим ведения не отключен, в результате чего за счет автоматизированного регулирования углового положения 34 пильного полотна последнее выравнивается по рабочей траектории 24 вне зависимости от управляющих воздействий со стороны пользователя. Если заданная траектория 23 обработки выходит за пределы контролируемой датчиком области, служащей в качестве зоны 31 регистрации, то прекращается поддержка пользователя машиной в ведении лобзиковой пилы 2 со смещением от заданной траектории 23 обработки параллельно ей. Поэтому предпочтительно формируется сигнал о выходе заданной траектории 23 обработки за пределы зоны 31 регистрации, в частности, посредством визуального и/или звукового сигнала. Соответствующее устройство звукового предупреждения обозначено позицией 37. В сочетании с таким предупреждением машину целесообразно выключать.
Поскольку благодаря полуавтономному режиму ведения лобзиковой пилы 2 пользователь должен лишь приближенно ориентировать технологическую машину по заданной траектории 23 обработки, от пользователя не требуется точно отслеживать и наблюдать эту траекторию; напротив, достаточно, если пользователь получает информацию о том, что заданная траектория 23 обработки все еще проходит через зону 31 регистрации, так что он может ориентироваться по зоне 31 регистрации или по иным предусмотренным индикаторам 38 с полем 39 индикации. Это также облегчается за счет наличия направленного на рабочую зону 9 и/или поле 10 обзора источника 45 подсветки.
С помощью предлагаемой в изобретении технологической машины 1 можно выпиливать контур, например контур встраиваемого предмета, такого как кухонная мойка, параллельно заданной траектории с большим или меньшим смещением относительно нее, и притом без значимых отклонений размеров, так что последующие работы могут проводиться беспрепятственно. Величину соответствующего смещения можно устанавливать произвольным образом и она должна находиться в пределах той контролируемой датчиком зоны, которая ограничена зоной 31 регистрации, внутри которой должна проходить заданная траектория 23 обработки, на расстоянии от которой, в соответствии с величиной смещения, проходит рабочая траектория 24. Если величина смещения такова, что при соответствующем сдвиге рабочей траектории 24 от заданной траектории 23 обработки последняя уже не находится в пределах зоны регистрации, то об этом предпочтительно подается сигнал, а также происходит выключение машины 1, поскольку работа в полуавтономном режиме с соответствующей поддержкой пользователя становится невозможной.
Смещение учитывается за счет того, что перемещается середина контролируемой датчиком зоны, т.е. центр 44 изображения, и в результате этого происходит активная раскалибровка системы. При этом центр 44 изображения представляет собой ориентир в виде "нулевой точки" для ориентации сенсорного устройства, выполненного в виде камеры 30, относительно положения пильного полотна (при нулевом угле установки). Таким образом, обеспечиваемая средствами 26 управления исполнительная система регулирования положения пильного полотна 8 получает симулированные данные о том, что оно выровнено точно по центру по заданной траектории 23 обработки, хотя в действительности в результате разъюстировки, оно находится на некотором постоянном расстоянии от заданной траектории 23 обработки как распознанной линии. В результате этого также обеспечивается то, что осуществляется соответствующее масштабирование контура, и линия обработки проходит так, что даже в местах закругления она всегда остается параллельной заданной траектории обработки.
На фиг.3 зона регистрации в целом обозначена позицией 40, заданная траектория 23 обработки символически - симулированно - в виде линии, проходящей по центру изображения, а штриховой линией обозначена полученная путем смещения рабочая траектория 24.
Способ и система для управления по меньшей мере одним исполнительным органом
Соединительное устройство для датчика и датчик
Оптический дальномер
Ручная машина в виде перфоратора и/или отбойного молотка
Блок управления средствами безопасности для автомобиля
Способ управления работой гибридного транспортного средства при неисправности энергетической системы и устройство для его осуществления
Ультразвуковой преобразователь для применения в текучей среде
Шестеренный насос
Керамический держатель оптики
Топливная форсунка
Сенсорное устройство и способ управления работой сенсорного устройства
Ручная машина с щеточным электрическим двигателем (варианты)
Способ управления работой автомобильной тормозной системы с гидравлическим приводом и с регулятором тормозных сил
Ручная машина с динамическим виброгасителем
Многоспектральный датчик
Ручная машина, прежде всего лобзиковая пила, дисковая пила, фрезерная машина или рубанок
Электромеханический усилитель тормозного привода
Соединительное устройство
Кабельный ввод для ручной машины
Электрическая машина

