Результат интеллектуальной деятельности: РОБОТ-ПЫЛЕСОС, СОДЕРЖАЩИЙ СЕНСОРНУЮ РУЧКУ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Изобретение относится к роботу-пылесосу, содержащему сенсорное средство для обнаружения физического контакта с неподвижными объектами в окружении пылесоса.
Предпосылки изобретения
Такой робот-пылесос раскрыт в US-A-2002/0174506. Эта публикация описывает автономный пылесос, содержащий устройство, которое может автоматизировать повседневную работу по дому, устраняя необходимость людей выполнять эту повторяющуюся и трудоемкую работу. Пылесос может автономно чистить комнату, в то время как пылесос перемещается по полу комнаты. При этом траектория пылесоса может контролироваться на основании наблюдений его окружения камерами или другим наблюдательным средством, таким как гидролокационные сенсоры или инфракрасные сенсоры. Дополнительно, сенсорное средство находится на одной или более стороне мобильного устройства для обнаружения физического контакта между мобильным устройством и неподвижными объектами (препятствиями) на полу комнаты. Сенсорное средство генерирует соответствующие сигналы управления для контролирования траектории перемещения пылесоса. Пылесос, описанный в US-A-2002/0174506, состоит из двух модулей, основного модуля, содержащего всасывающий вентилятор и секцию для сбора мусора, и модуля чистящей головки, соединенного с основным модулем шлангом, через который мусор перемещается из модуля чистящей головки в основной модуль.
Мобильный робот-пылесос должен находить траекторию перемещения вокруг и между неподвижными объектами в своем окружении. Когда перемещающийся пылесос касается неподвижного объекта, направление перемещения должно меняться, так что столкновение с неподвижными объектами предотвращается. Таким образом, физический контакт с таким неподвижным объектом обнаруживается для изменения направления перемещения пылесоса, например, на противоположное направление от неподвижного объекта.
Сущность изобретения
Обычно при желании пылесос можно переносить рукой, например, чтобы принести пылесос в комнату, которую нужно почистить. Поэтому пылесос может снабжаться шарнирной ручкой. Публикация US-A-2006/0137129 описывает пылесос, содержащий ручку, которая может поворачиваться между первым положением, при котором ручка находится в, по существу, вертикальном положении для переноски пылесоса рукой, и вторым положением, при котором ручка располагается близко от корпуса пылесоса.
Задачей изобретения является робот-пылесос, который можно переносить рукой, пылесос содержит эффективное сенсорное средство для обнаружения физического контакта с неподвижными объектами в окружении, когда перемещается по полу комнаты, которую необходимо почистить.
Для выполнения этой задачи пылесос содержит ручку для переноски пылесоса рукой, ручка может поворачиваться между первым положением, при котором ручка находится в, по существу, вертикальном положении для переноски пылесоса, и вторым положением, при котором ручка располагается близко от корпуса пылесоса, в результате чего указанное сенсорное средство может обнаруживать усилия, прилагаемые к ручке, когда ручка находится в указанном втором положении. Таким образом, обнаруженные усилия могут быть преобразованы в соответствующие сигналы управления для контролирования траектории перемещения пылесоса.
В указанном втором положении ручка достигает наружной стороны корпуса пылесоса, так что она может быть сформирована как элемент обнаружения вокруг части корпуса для установления физического контакта с неподвижными объектами, когда пылесос перемещается по полу. Таким образом, она является соответствующим средством для восприятия такого физического контакта.
Сенсорное средство может находиться на поверхности ручки, но в предпочтительном варианте осуществления сенсорное средство может обнаруживать перемещения ручки, когда ручка находится в указанном втором положении. Таким образом, ручка может удерживаться пружинами или другим упругим средством в указанном втором положении, при этом она может перемещаться немного, преодолевая усилие указанных пружин или другого упругого средства. Такое перемещение воспринимается сенсорным средством и преобразуется в соответствующий сигнал управления для контролирования траектории перемещения пылесоса.
Предпочтительно, сенсорное средство содержит микровыключатели для обнаружения перемещений ручки, когда ручка находится в указанном втором положении. Более предпочтительно, микровыключатели располагаются в местах, где могут быть измерены другие перемещения ручки, так что соответствующие сигналы управления могут быть выработаны для других перемещений ручки.
В предпочтительном варианте осуществления на виде сверху пылесоса, по меньшей мере, часть ручки продолжается с наружной стороны остального участка пылесоса. Большинство из неподвижных объектов в комнате, таких как столы, стулья, стены, дверные коробки и т.д., имеют около пола вертикальные поверхности, так что элемент обнаружения, продолжающийся за сторону корпуса пылесоса (на виде сверху), будет касаться таких объектов, когда пылесос ударяется об них.
В предпочтительном варианте осуществления на виде сбоку пылесоса часть ручки образует самую высокую часть пылесоса, когда ручка находится во втором положении. При этом ручка будет продвигаться вниз в случае, если перемещающийся пылесос попадает под очень низкий объект, так что присутствие и местоположение такого объекта обнаруживается.
Изобретение также относится к способу контролирования траектории перемещения робота-пылесоса, при котором сигнал управления генерируется сенсорным средством, когда физический контакт между пылесосом и неподвижным объектом в окружении пылесоса обнаруживается указанным сенсорным средством, и при котором пылесос содержит ручку для переноски пылесоса рукой, так что ручка может поворачиваться между первым положением, при котором ручка находится в, по существу, вертикальном положении для переноски пылесоса, и вторым положением, при котором ручка располагается близко от корпуса пылесоса, в результате чего указанное сенсорное средство обнаруживает усилия, прилагаемые к ручке, когда ручка находится в указанном втором положении.
WO 00/36970 А раскрывает переносной робот-пылесос, содержащий ручку, обеспеченную на одной стороне, близлежащей к ведущему колесу. Ручка подпружинена в выступающем вверх положении для поднятия пылесоса с пола. Ручка располагается по существу внутри корпуса пылесоса и имеет форму, такую, что за нее может браться пользователь. Так как пользователь поднимает пылесос, ручка поворачивается от стороны пылесоса, ручка выступает наружу со стороны пылесоса, когда пылесос подняли с пола.
Краткое описание чертежей
Изобретение будет здесь дополнительно объяснено посредством описания варианта осуществления робота-пылесоса, при этом ссылка делается на чертеж, содержащий четыре фигуры, при этом:
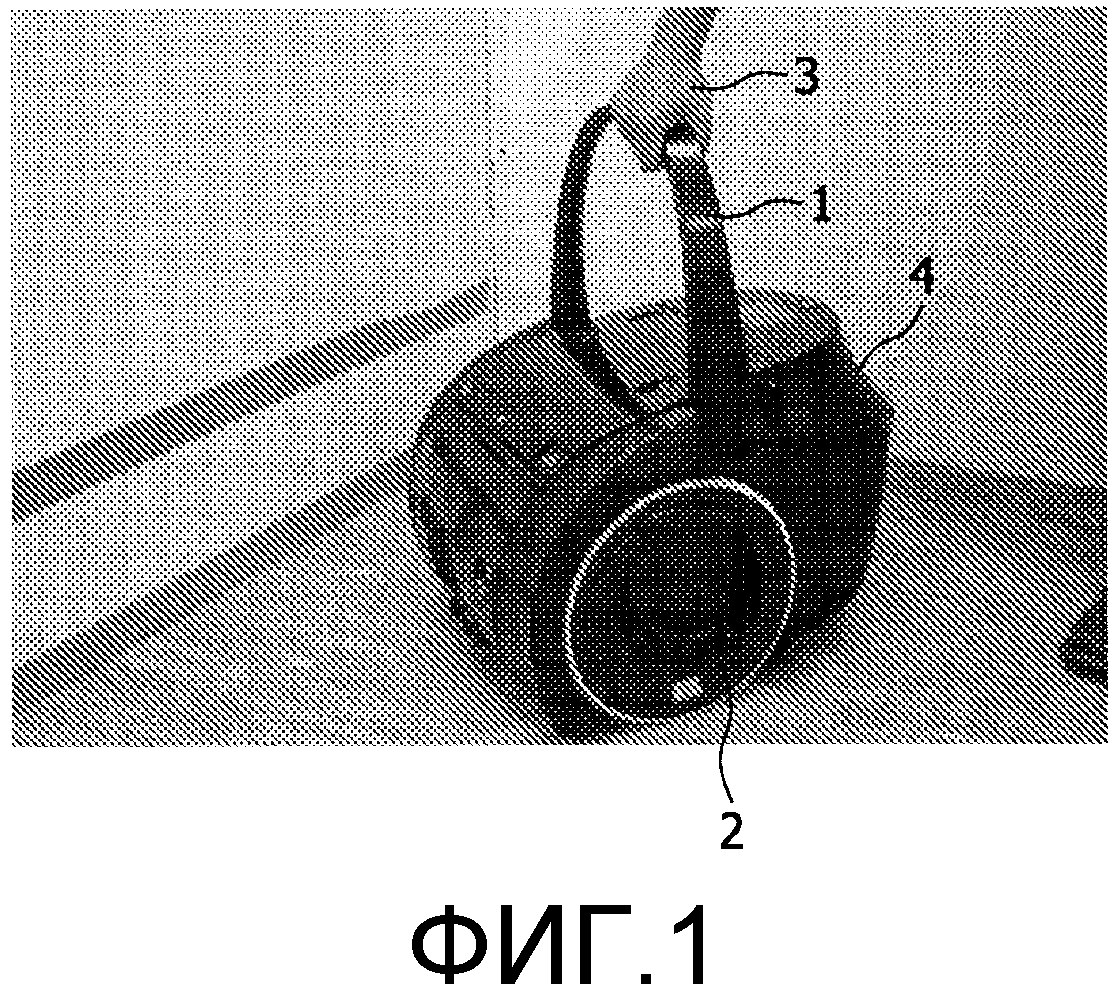
фиг.1 изображает пылесос в положении при переноске;
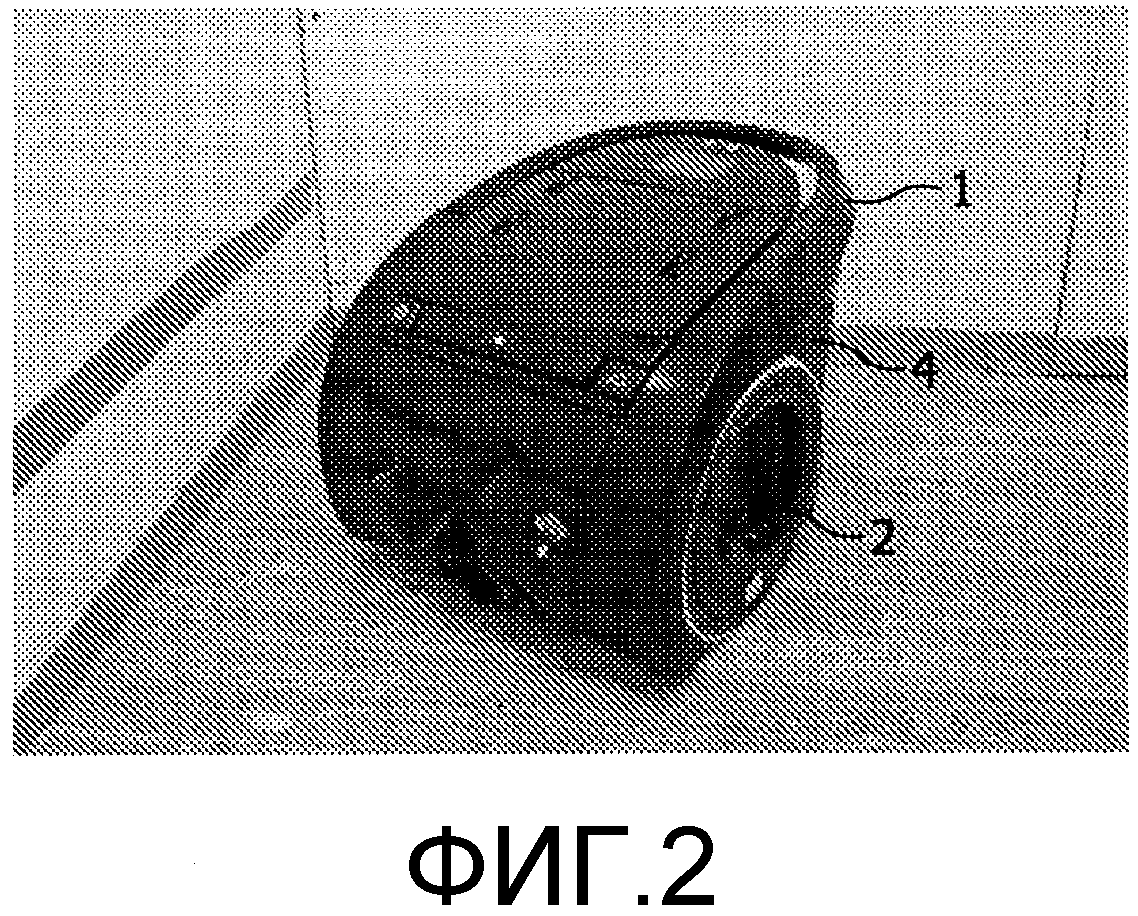
фиг.2 представляет собой вид в перспективе пылесоса;
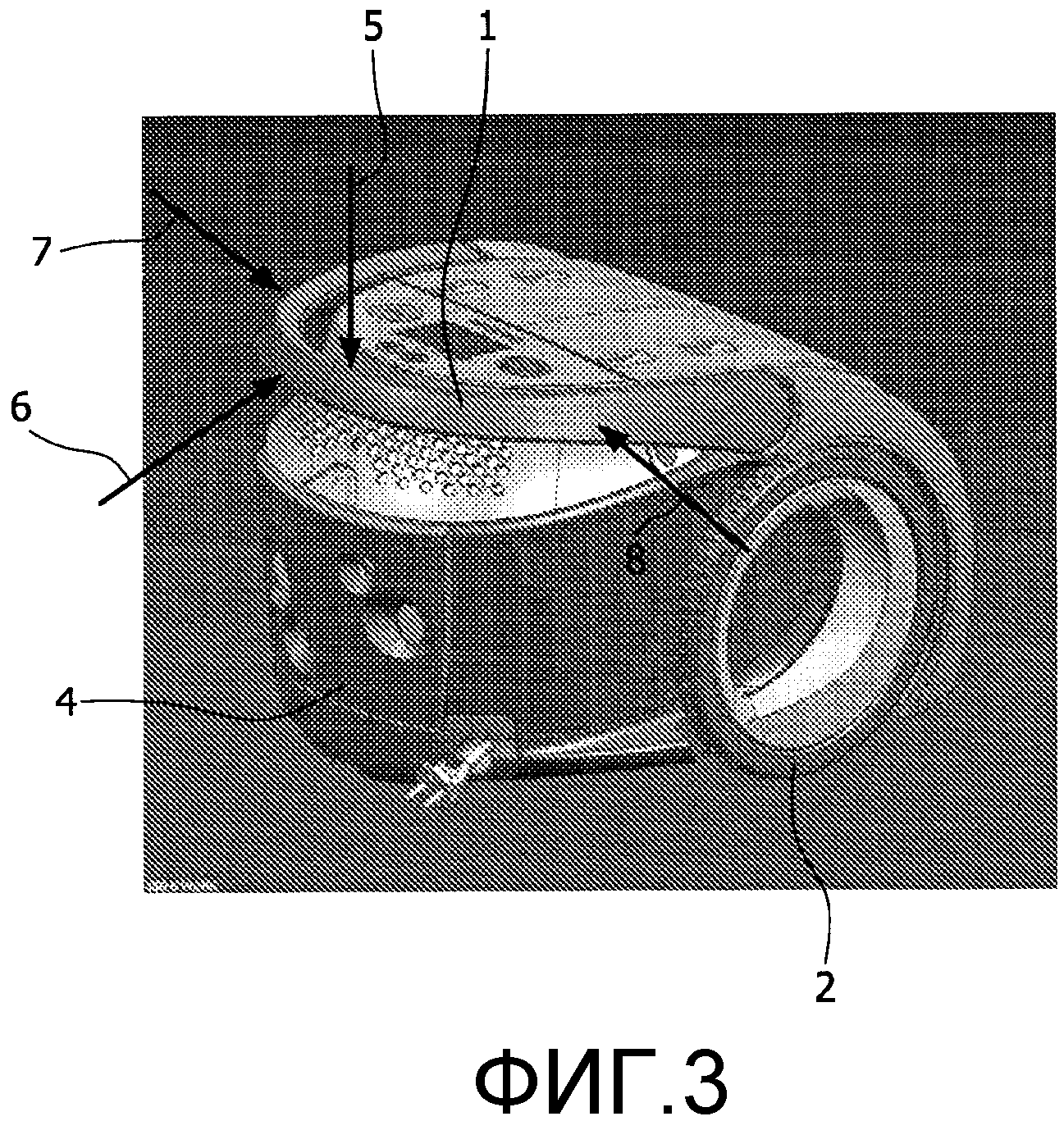
фиг.3 изображает другой вид в перспективе пылесоса; и
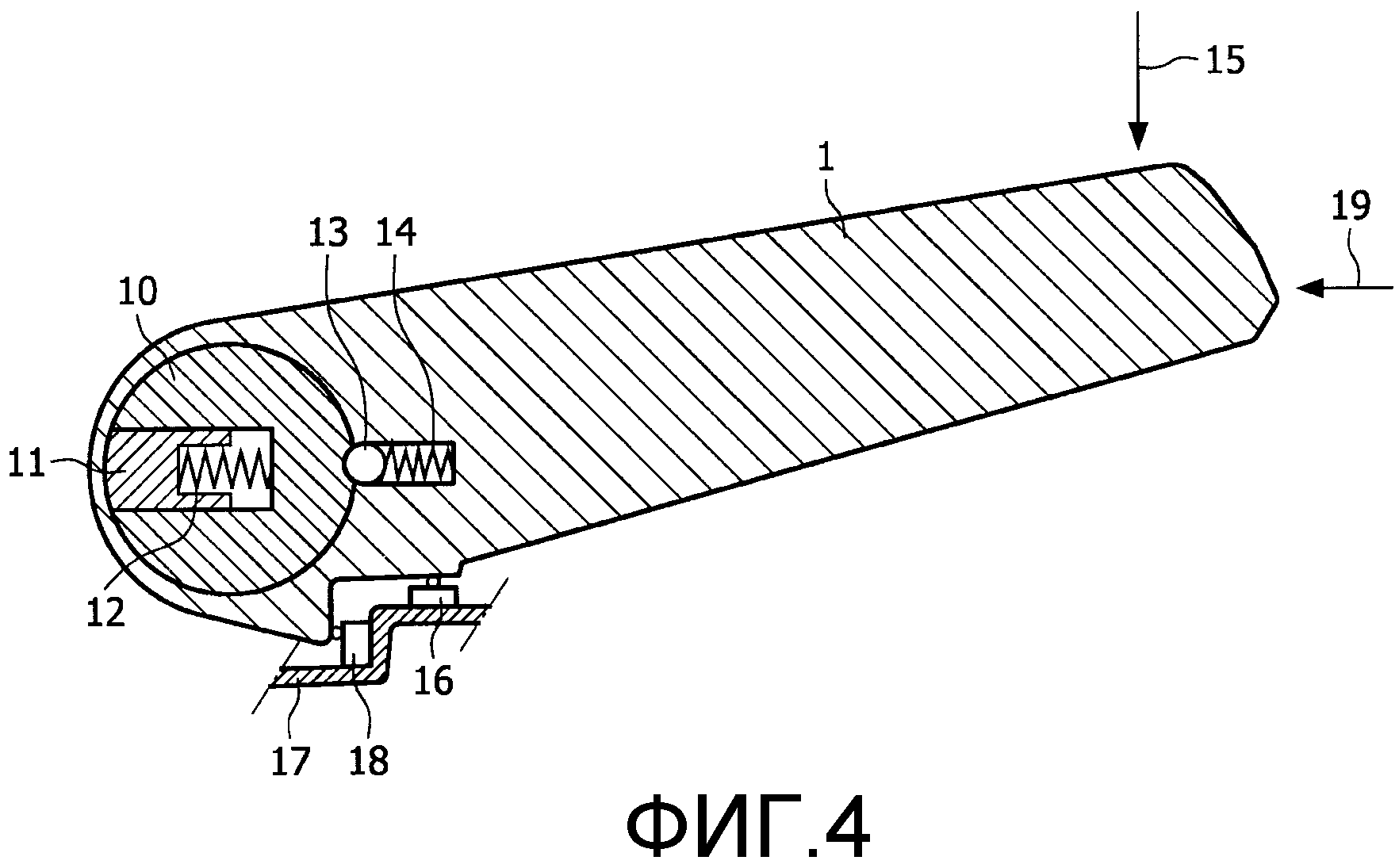
фиг.4 представляет собой схематичный вид в разрезе сенсорного средства.
Подробное описание варианта осуществления
Фиг.1-3 изображают вариант осуществления робота-пылесоса, содержащего шарнирную ручку 1 для переноски устройства. Пылесос содержит два ведомых колеса 2, расположенных на обеих сторонах устройства (фигуры изображают только одно из этих колес). Кроме того, он содержит ролик, который может вращаться вокруг вертикальной оси так, что пылесос может перемещаться в любом направлении, ролик расположен на нижней стороне пылесоса и не виден на фигурах. Приведением в движение двух колес 2 независимо с заданными скоростями пылесос может перемещаться по полу комнаты в любом необходимом меняющемся направлении во время своей работы.
Фиг.1 изображает ручку 1 в вертикальном положении, так что пылесос можно переносить рукой 3, как изображено на фигуре. Фиг.2 изображает ручку во втором положении, являющемся положением во время работы робота-пылесоса. Фиг.3 изображает пылесос с другой стороны. Ручка 1 пылесоса функционирует как элемент обнаружения во время работы пылесоса, при этом ручка находится во втором положении, как изображено на фиг.2 и 3. Ручка 1 достигает наружной стороны корпуса 4 пылесоса, так что ручка 1 может устанавливать физический контакт с неподвижными объектами в окружении, когда пылесос перемещается по полу комнаты, которую необходимо почистить.
Стрелки 5, 6, 7, 8 на фиг.3 указывают направление, в котором неподвижные объекты могут ударяться о ручку 1, когда пылесос перемещается по полу во время работы. Когда пылесос перемещается под очень низким столом, ручка 1 будет продвигаться вниз, как указано стрелкой 5. Перемещение вниз ручки 1 будет обнаруживаться микровыключателем, как будет объяснено ниже, в результате чего генерируется сигнал управления для изменения направления перемещения устройства, например, на противоположное направление. Когда пылесос перемещается влево (на фиг.3), столкновение с неподвижным объектом будет продвигать ручку 1 в направлении, указанном стрелкой 6. Перемещение ручки 1 будет обнаружено одним или более микровыключателями для генерирования соответствующего сигнала управления для изменения направления перемещения пылесоса, так что можно уклониться от неподвижного объекта.
В частности, когда пылесос следует по криволинейной траектории, ручка 1 может продвигаться в сторону неподвижным объектом, как указано стрелками 7 и 8. Такое столкновение пылесоса с неподвижным объектом также обнаруживается микровыключателями, измеряющими перемещение ручки 1, так что соответствующий сигнал управления генерируется для изменения направления перемещения устройства.
Фиг.4 изображает схематичный вид в разрезе сенсорного средства для обнаружения перемещения ручки 1. Ручка 1 установлена на валу 10 и может поворачиваться вокруг вала 10. Вал 10 продолжается через корпус 4 пылесоса, при этом два конца вала 10 достигают с наружной стороны корпуса 4 пылесоса. Каждый конец ручки 1 соединен с концом вала 10, так что между ручкой 1 и остальной частью пылесоса достигается прочное соединение. Вал 10 соединен с корпусом 4 пылесоса через элемент 11, являющийся частью корпуса 4. Вал 10 может перемещаться влево (на фиг.4) в отношении элемента 11, но продвигается вправо посредством цилиндрической пружины 12.
Когда ручка 1 находится во втором положении, как изображено на фиг.4, ручка 1 удерживается в этом положении посредством шарика 13, нагруженного пружиной, так что шарик 13 взаимодействует с соответствующим углублением в валу 10. В указанном втором положении цилиндрическая пружина 14 продвигает шарик 13 в это углубление, и когда ручка 1 перемещается немного из второго указанного положения, цилиндрическая пружина 14 обеспечивает усилие для перемещения ручки 1 обратно во второе положение. Когда ручка 1 находится в вертикальном положении, как изображено на фиг.1, шарик 13 опирается на цилиндрическую поверхность на верхней стороне вала 10.
Когда робот-пылесос работает, ручка 1 функционирует как датчик для обнаружения физического контакта, т.е. столкновения, с неподвижными объектами в окружении перемещающегося пылесоса. Когда к ручке не прилагается усилие, ручка удерживается во втором положении цилиндрическими пружинами 12 и 14, эти пружины 12 и 14 находятся около обоих концов вала 10 и ручки 1. В момент, когда к ручке 1 прилагается направленное вниз усилие, как указано стрелкой 15 (на фиг.3 стрелкой 5), ручка 1 будет поворачиваться немного вокруг вала 10 в направлении по часовой стрелке, против толкающего усилия цилиндрической пружины 14. Такое перемещение ручки 1 обнаруживается микровыключателем 16, который прикрепляется к кожуху 17 корпуса 4 пылесоса. Когда микровыключатель 16 приводится в действие, генерируется сигнал управления для изменения направления перемещения пылесоса.
Чтобы обнаружить перемещения ручки 1 в, по существу, горизонтальной плоскости, как указано стрелкой 19 (на фиг.3 стрелками 6, 7, 8), микровыключатель 18 находится на каждом конце ручки 1. Микровыключатель 18 также прикреплен к кожуху 17 корпуса 4 пылесоса и приводится в действие, когда ручка 1 находится во втором положении. Перемещение ручки 1, как указано стрелкой 19, делает неактивным микровыключатель 18, в результате чего генерируется сигнал управления для изменения направления перемещения робота-пылесоса. В случае если только один из двух микровыключателей 18 на каждом конце ручки 1 обнаруживает перемещение ручки 1, происходит перемещение в сторону ручки 1, при этом может генерироваться соответствующий сигнал управления.
Несмотря на то, что изобретение пояснено на чертеже и в вышеизложенном описании, такое изображение и описание являются иллюстративными или примерными и не ограничительными; изобретение не ограничивается раскрытым вариантом осуществления. Любые ссылочные обозначения в формуле изобретения не следует истолковывать как ограничение объема изобретения.
Мобильное роботизированное устройство, имеющее датчик столкновений
Устройство и способ управления смешиванием газов
Реконструкция радионуклидного изображения
Аутентификация устройства и пользователя
Анатомически определенная автоматизированная генерация планарного преобразования криволинейных структур (cpr)
Передача данных 3d изображения
Объединение данных 3d изображения и графических данных
Картирование градиента восприимчивости
Датчик направленности света
Решетка и способ изготовления решетки для селективного пропускания электромагнитного излучения, в частности, рентгеновского излучения
Композиция для бритья, содержащая полиэтиленгликоль

