Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ДЛЯ СОЗДАНИЯ СИГНАЛА МЕСТОПОЛОЖЕНИЯ
Вид РИД
Изобретение
Изобретение относится к способу создания сигнала местоположения, который указывает место положения транспортного средства, в частности место положения колейного транспортного средства (например, рельсового транспортного средства).
Как известно, для управления рельсовыми транспортными средствами можно использовать автоматические устройства управления поездом, такими как, например, устройства АТО (АТО: Automatic Train Operation = автоматическое управление поездом). Для обеспечения автоматического управления поездом непрерывно определяется положение рельсового транспортного средства и используется для управления поездом.
Кроме того, относительно точное определение местоположения рельсового транспортного средства требуется, когда должно осуществляться высокоточное позиционирование рельсового транспортного средства, например, в точках посадки и высадки, таких как, например, защитные двери перрона, поскольку посадка и высадка пассажиров затрудняется или невозможна, когда двери рельсового транспортного средства не находятся противоположно защитным дверям перрона.
В настоящее время для определения места положения рельсового транспортного средства используются, например, уложенные в пути перекрещивающиеся линии направляющей петли или маяка в виде ориентира, в большинстве случаев в соединении с имеющимся на рельсовом транспортном средстве счетчиком пройденного пути. При этом затраты на установку на стороне рельсов тем больше, чем точнее должно быть позиционирование рельсового транспортного средства, поскольку плотность местных опорных точек должна быть тем больше, чем точнее необходимо определять местоположение транспортного средства.
Относительно точный сигнал местоположения необходим, как известно, не только для позиционирования рельсового транспортного средства, но также когда необходимо контролировать надежную остановку рельсового транспортного средства. В настоящее время для контролирования остановки используются, как правило, компоненты счетчика пройденного пути на стороне транспортного средства. При этом система датчиков счетчика пройденного пути может состоять, например, из передатчика импульсов положения и доплеровского радара. Однако недостатком доплеровского радара является то, что по физическим причинам нельзя измерять скорость меньше 2 км/ч, и поэтому он лишь очень ограниченно пригоден для распознавания остановки. Однако передатчик лишь импульсов положения является в большинстве случаев недостаточным по соображениям безопасности; как правило, требуются вторичные или параллельные системы для обеспечения надежности всей системы в случае выхода из строя одного устройства.
В соответствии с этим в основу изобретения положена задача создания способа для создания сигнала местоположения. Способ должен быть очень простым в выполнении, однако создавать сигналы очень точного местоположения.
Эта задача решена, согласно изобретению, с помощью способа с признаками пункта 1 формулы изобретения. Предпочтительные варианты выполнения способа, согласно изобретению, указаны в зависимых пунктах формулы изобретения.
В соответствии с этим, согласно изобретению, предусмотрено, что заранее внесенный в память опорный объект идентифицируют в окружении транспортного средства, опорный объект подвергают измерению расстояния или на основе разделенных изображений, или на основе совпадения контуров и посредством оценки измерения расстояния на основе разделенных изображений или совпадения контуров создают сигнал местоположения.
Существенным преимуществом способа, согласно изобретению, является то, что определение местоположения выполняют на основе оптического измерения, за счет чего обеспечивается возможность достижения очень высокой точности измерения со сравнительно низкими затратами на измерительную технику. С помощью способа, согласно изобретению, можно выполнять также распознавание состояния остановки посредством контролирования изменений во времени сигнала местоположения. В целом, способ, согласно изобретению, обеспечивает возможность определения местоположения и тем самым также распознавания неподвижности транспортного средства с небольшими затратами на основании, согласно изобретению, измерения расстояния на основе разделенных изображений или совпадения контуров, однако, несмотря на это, с хорошими результатами измерения.
Предпочтительно в рамках измерения расстояния на основе разделенных изображений или совпадения контуров создают два подызображения опорного объекта и получают их с помощью одной камеры и опорный объект в полученных частичных изображениях подвергают измерению расстояния на основе разделенных изображений или совпадения контуров.
Согласно одному особенно предпочтительному варианту выполнения способа предусмотрено, что в качестве сигнала местоположения создают сигнал расстояния, который указывает расстояние до опорного объекта тем, что в рамках измерения расстояния на основе разделенных изображений или совпадения контуров сначала измеряют расстояние до опорного объекта с образованием измеренного значения расстояния и измеренное значение расстояния затем выдают с сигналом местоположения.
Предпочтительно в рамках измерения расстояния на основе разделенных изображений или совпадения контуров создают с помощью устройства для измерения расстояния на основе разделенных изображений или совпадения контуров два частичных изображения, и устройство для измерения расстояния на основе разделенных изображений или совпадения контуров регулируется настолько, пока частичные изображения не будут совпадать друг с другом, соответственно, пока не будет установлено совпадение частичных изображений. На основании параметров установки устройства измерения расстояния на основе разделенных изображений или совпадения контуров, для которых частичные изображения подгоняются друг к другу, определяют измеренное значение расстояния.
Особенно быстро и просто можно устанавливать совпадение, соответственно, совпадение частичных изображений в рамках цифровой обработки изображения с помощью устройства обработки данных.
Также предпочтительно, когда настройка устройства для измерения расстояния на основе разделенных изображений или совпадения контуров осуществляется с помощью устройства обработки данных.
Согласно другому предпочтительному варианту выполнения способа предусмотрено, что в качестве сигнала местоположения создают выходной сигнал, который указывает, имеется или нет заранее заданное расстояние до опорного объекта, что с помощью установленного на заранее заданное расстояние устройства измерения расстояния на основе разделенных изображений или совпадения контуров проверяют, имеется ли совпадение созданных с помощью устройства измерения расстояния на основе разделенных изображений или совпадения контуров частичных изображений, соответственно, или подгоняются ли они друг к другу, и при совпадении или подгонке создают другой выходной сигнал, чем при отсутствии совпадении или отсутствии подгонки частичных изображений.
Подгонку или совпадение частичных изображений можно устанавливать, например, в рамках способа цифровой обработки изображения с помощью устройства обработки данных. Предпочтительно в качестве выходного сигнала создают цифровой или двоичный сигнал.
Кроме того, изобретение относится к устройству для создания сигнала местоположения, которое указывает местоположение транспортного средства, в частности колейного транспортного средства (например, рельсового транспортного средства).
В этой связи, согласно изобретению, предусмотрено:
устройство измерения расстояния на основе разделенных изображений или совпадения контуров, которое на стороне выхода создает два частичных изображения окружения транспортного средства, расположенная после устройства измерения расстояния на основе разделенных изображений или совпадения контуров камера для записи частичных изображений и соединенное с камерой устройство обработки данных, которое выполнено так, что оно в рамках обработки данных идентифицирует заранее внесенный в память опорный объект в записанных частичных изображениях, например в рамках способа цифровой обработки данных, и за счет оценки частичных изображений опорного объекта создает сигнал местоположения.
Согласно первому предпочтительному варианту выполнения устройства предусмотрено, что устройство обработки данных выполнено так, что оно в качестве сигнала местоположения создает сигнал расстояния, который указывает расстояние до опорного объекта, что оно в рамках измерения расстояния на основе разделенных изображений или совпадения контуров сначала измеряет расстояние до опорного объекта с образованием измеренного значения расстояния и выдает соответствующее измеренное значение расстояния с сигналом местоположения.
Предпочтительно устройство измерения расстояния на основе разделенных изображений или совпадения контуров имеет устройство регулировки, которое предназначено для управления и регулировки с помощью устройства обработки данных, при этом устройство обработки данных выполнено так, что оно регулирует устройство регулировки таким образом, что записанные камерой частичные изображения не будут подогнаны друг к другу или пока не будет установлено совпадение, и на основании имеющихся параметров установки устройства регулировки при совпадении или совпадении частичных изображений определяется измеренное значение расстояния.
Согласно второму предпочтительному варианту выполнения устройства предусмотрено, что устройство обработки данных выполнено так, что оно в качестве сигнала местоположения создает выходной сигнал, который указывает, имеется или нет заданное расстояние до опорного объекта, тем, что оно с помощью предварительно установленного на заданное расстояние устройства измерения расстояния на основе разделенных изображений или совпадения контуров проверяет, подогнаны ли записанные камерой частичные изображения или имеется ли совпадение, и при подогнанных частичных изображениях или совпадении создает другой двоичный выходной сигнал, чем при не совпадающих частичных изображениях или отсутствии подгонки.
Ниже приводится более подробное пояснение изобретения на основании примеров выполнения со ссылками на прилагаемые чертежи, на которых в качестве примера изображено:
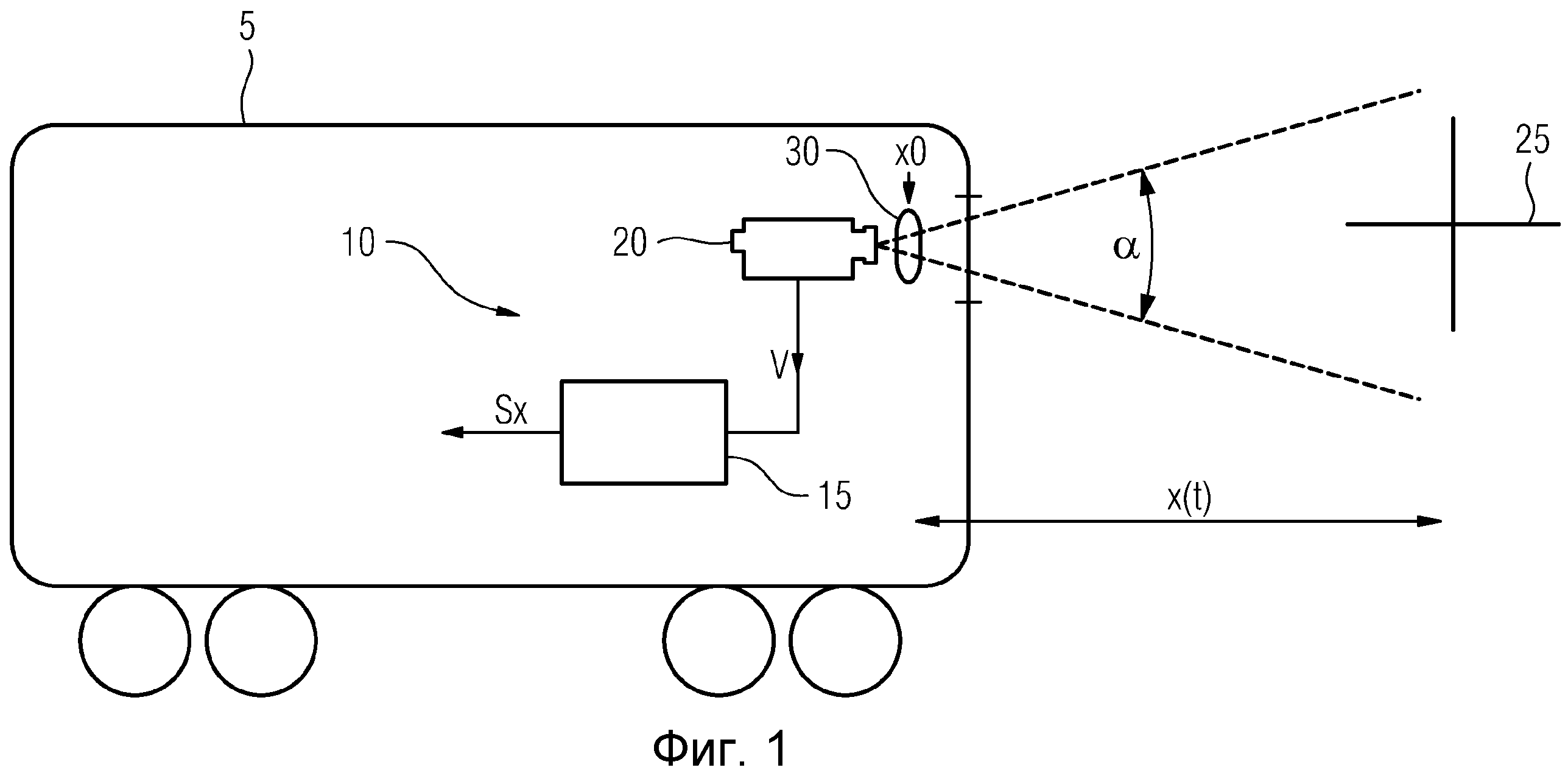
Фиг.1 - первый пример выполнения устройства для создания сигнала местоположения;
Фиг.2-5 - примеры выполнения частичных изображений, которые создаются камерой устройства, согласно Фиг.1;
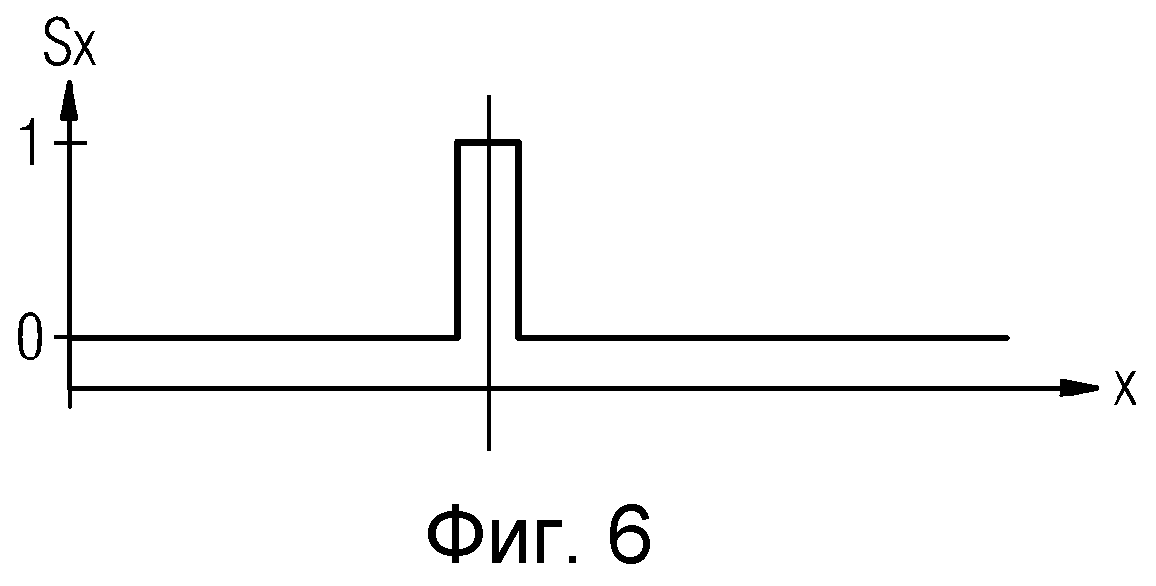
Фиг.6 - пример выполнения двоичного выходного сигнала, который может создаваться устройством, согласно Фиг.1;
Фиг.7 - второй пример выполнения устройства для создания сигнала местоположения;
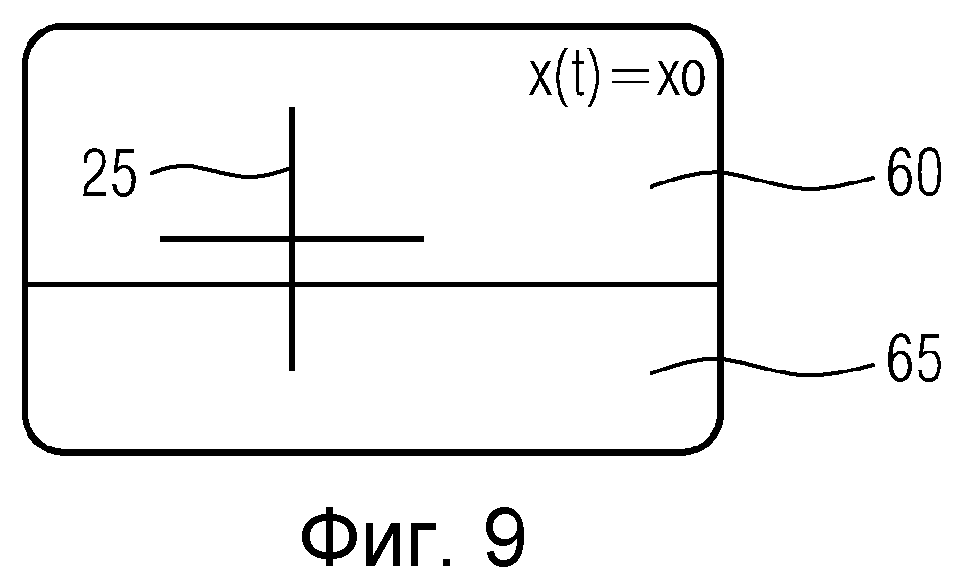
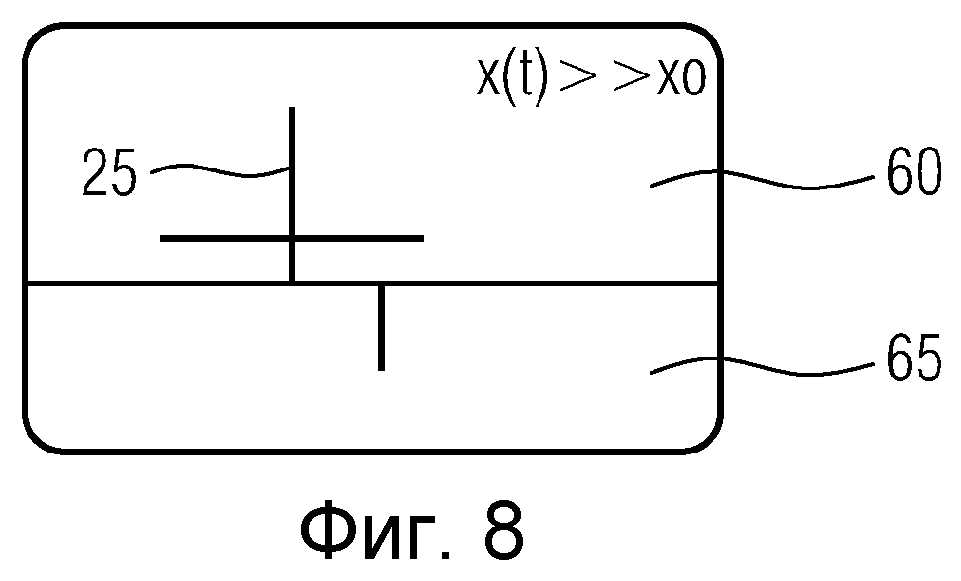
Фиг.8 и 9 - примеры выполнения частичных изображений, которые создаются камерой устройства, согласно Фиг.7;
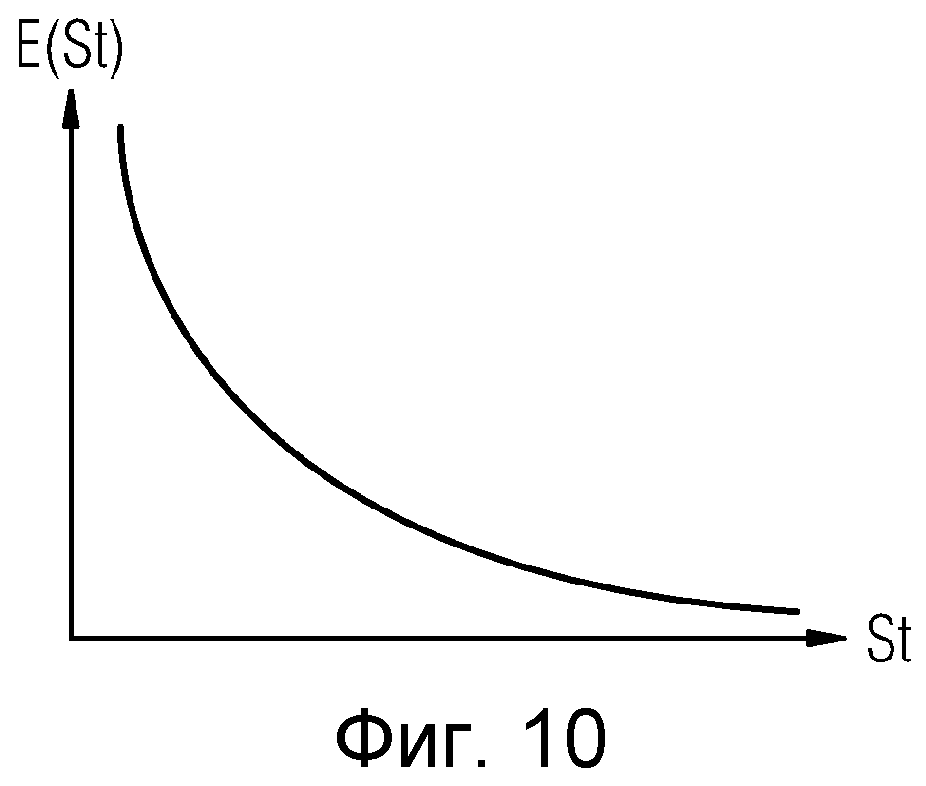
Фиг.10 - пример выполнения калибровочной кривой для создания измеренного значения расстояния для устройства, согласно Фиг.7;
Фиг.11 - пример выполнения измеренного значения расстояния устройства, согласно Фиг.7, в форме профиля времени;
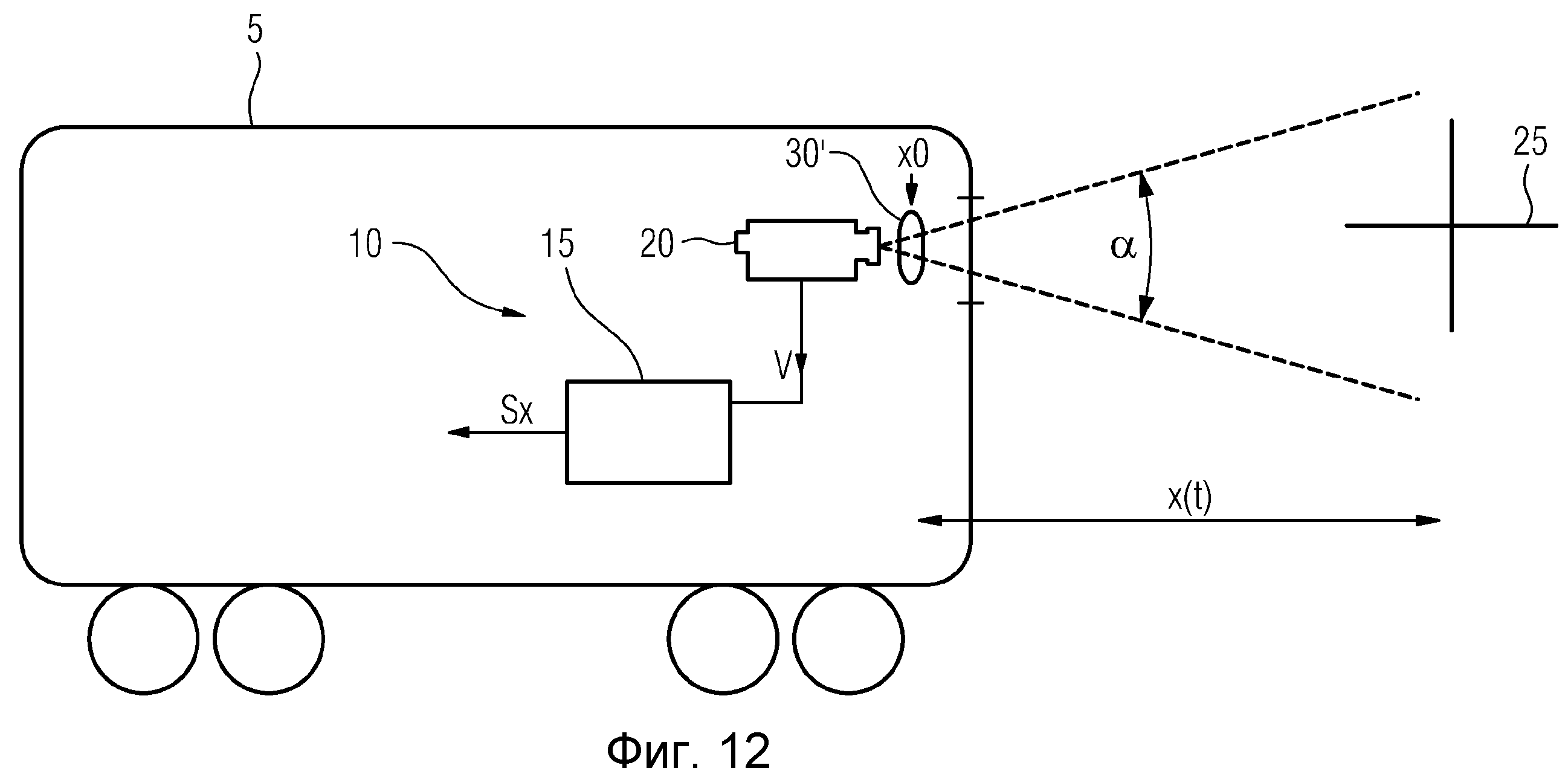
Фиг.12 - третий пример выполнения устройства для создания сигнала местоположения;
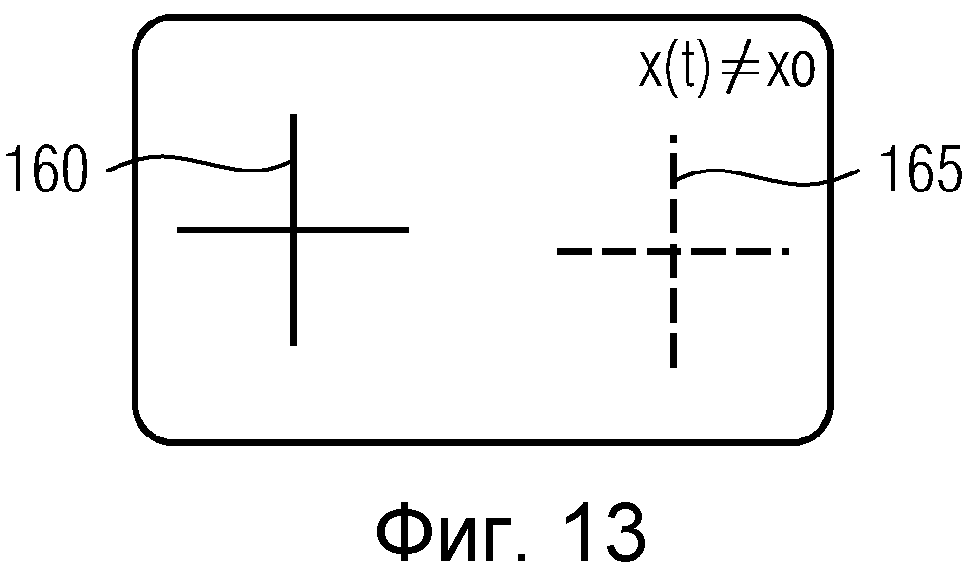
Фиг.13-14 - примеры выполнения частичных изображений, которые создаются камерой устройства, согласно Фиг.12;
Фиг.15 - четвертый пример выполнения устройства для создания сигнала местоположения; и
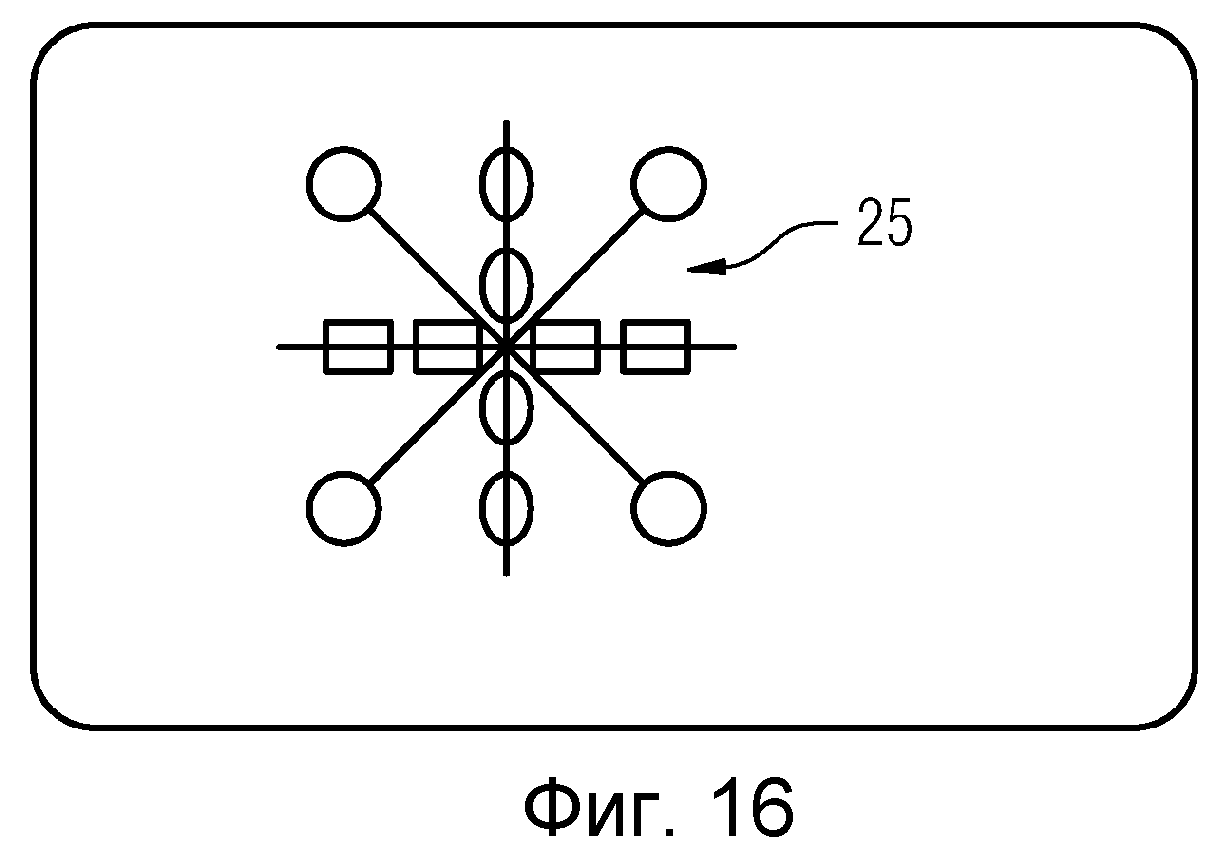
Фиг.16 - другой пример выполнения опорного объекта, на основании которого можно создавать сигнал местоположения.
На фигурах для ясности идентичные или подобные компоненты везде обозначены одинаковыми позициями.
На Фиг.1 показано рельсовое транспортное средство 5, которое снабжено устройством 10 для создания сигнала Sx местоположения. Устройство 10 имеет устройство 15 обработки данных, с которым соединена камера 20.
Как показано на Фиг.1, камера 20 ориентирована на опорный объект 25, который установлен неподвижно на перегоне и положение которого заранее известно. Угол обзора камеры 20 обозначен на Фиг.1 как угол α.
Камера 20 может быть установлена неподвижно в рельсовом транспортном средстве 5, так что угол α обзора не может изменяться. В качестве альтернативного решения, камера 20 может быть также снабжена функцией изменения масштаба изображения, так что можно произвольно устанавливать угол α обзора. Можно также устанавливать камеру 20 с возможностью поворота или наклона на механически переставляемом удерживающем приспособлении, с целью обеспечения возможности направления камеры 20, предпочтительно под управлением устройства 15 обработки данных, на любые объекты вдоль преодолеваемого рельсовым транспортным средством пути. Такое механически переставляемое удерживающее приспособление для ясности не изображено на Фиг.1.
В показанном на Фиг.1 примере выполнения опорный объект 25 образован крестом; естественно, возможны также другие формы опорного объекта; например, опорным объектом могут быть также здания или части зданий, в которые въезжает рельсовое транспортное средство или мимо которых оно проезжает. На Фиг.16 показан другой пример выполнения для подходящего опорного объекта 25; на основании его необычной формы он распознается относительно просто в рамках машинного автоматического распознавания изображения по существу в любом частичном изображении устройства 30 измерения расстояния на основе разделенных изображений.
Кроме того, как показано на Фиг.1, между камерой 20 и опорным объектом 25 расположено устройство 30 измерения расстояния на основе разделенных изображений. В показанном на Фиг.1 примере выполнения установка параметров устройства 30 измерения расстояния на основе разделенных изображений задана неизменно и неизменно установлена на заданное значение x0 расстояния.
Расстояние между рельсовым транспортным средством 5 и опорным объектом 25 обозначено позицией x(t). Например, исходят из того, что рельсовое транспортное средство приближается к опорному объекту 25, так что расстояние до опорного объекта 25 становится меньше.
Поскольку устройство 30 послойного измерения расстояния расположено перед камерой 20, то камера 20 в качестве видеосигнала V создает два частичных изображения и передает их дальше в устройство 15 обработки данных.
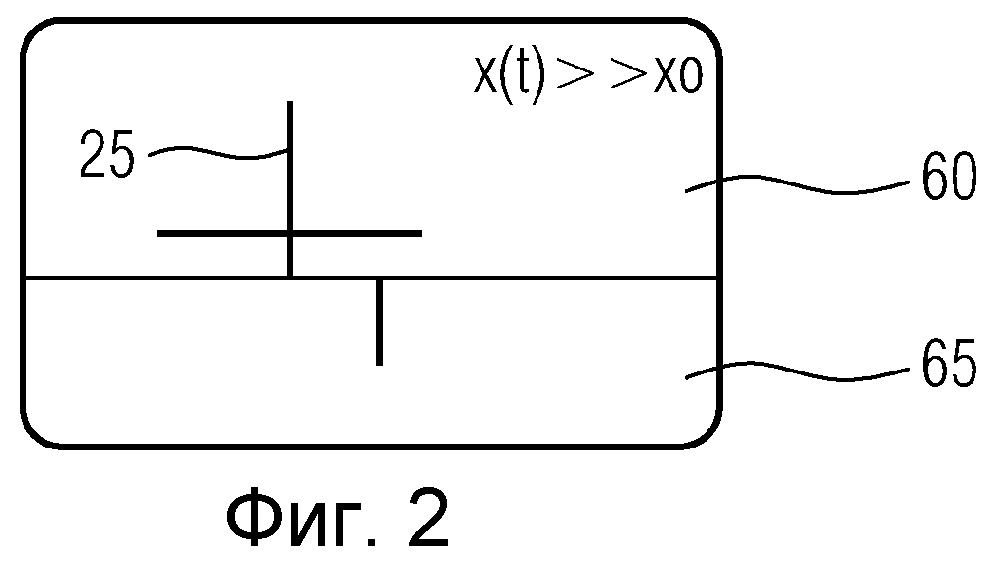
На Фиг.2 показан пример выполнения созданных камерой 20 частичных изображений. Верхнее на Фиг.2 частичное изображение обозначено позицией 60, и нижнее на Фиг.2 частичное изображение обозначено позицией 65.
Можно видеть, что опорный объект 25 воспроизведен неправильно, поскольку между обоими частичными изображениями 60 и 65 возникает смещение. В показанном на Фиг.2 примере выполнения исходят из того, что расстояние между рельсовым транспортным средством 5 и опорным объектом 25 еще очень велико. То есть x>>x0.
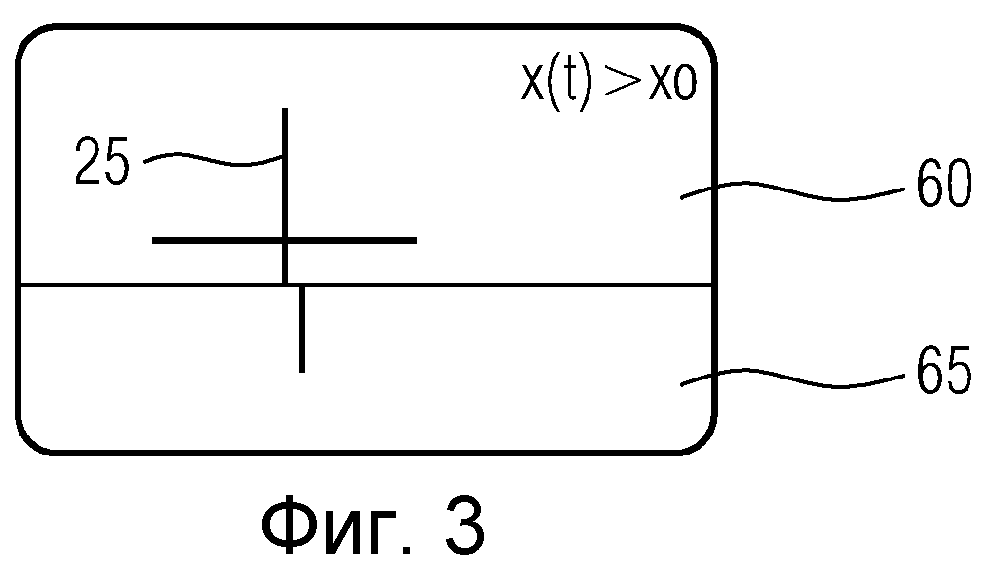
Если рельсовое транспортное средство 5 приближается к опорному объекту 25, то смещение между обоими частичными изображениями 60 и 65 относительно опорного объекта 25 становится меньше. Это показано в качестве примера на Фиг.3. Можно видеть, что опорный объект 25 показан почти правильно.
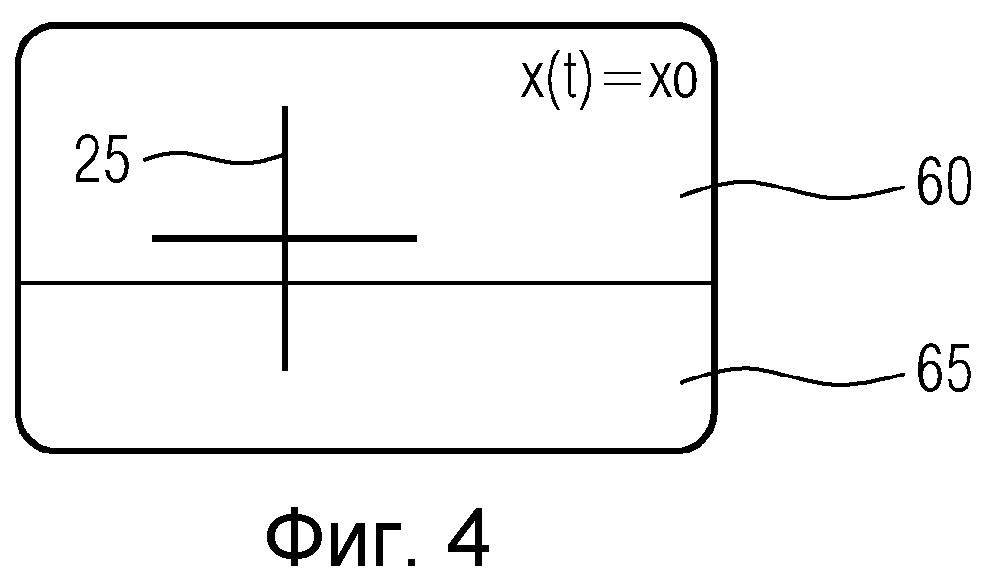
Если рельсовое транспортное средство 25 приближается далее к опорному объекту 25, то расстояние x(t) до опорного объекта 25 будет соответствовать предварительно установленному значению x0 расстояния устройства 30 измерения расстояния на основе разделенных изображений. То есть в этом случае x(t)=x0. При этом расстоянии опорный объект 25 правильно представлен в созданном камерой 20 видеосигнале V (см. Фиг.4). Можно видеть, что нижнее частичное изображение 65 подгоняется к верхнему частичному изображению 60 и опорный объект 25 показан без искажения.
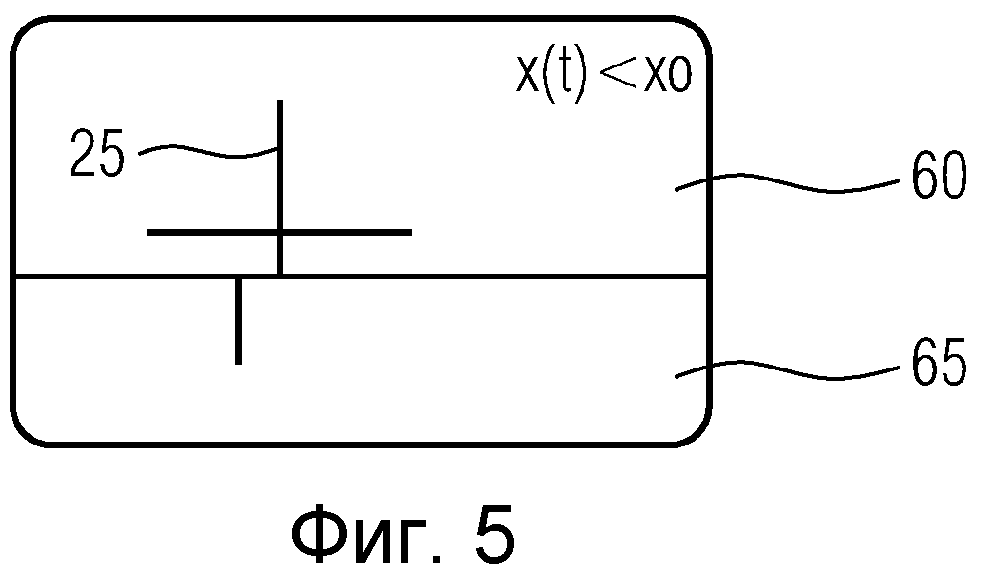
Если теперь рельсовое транспортное средство 5 перемещается еще дальше к опорному объекту 25, то расстояние становится меньше, чем заданное значение x0 расстояния устройства 30 измерения расстояния на основе разделенных изображений. В этом случае для значений x<x0 снова образуется сдвинутое изображение, как показано в качестве примера на Фиг.5. Оба частичных изображения 60 и 65 снова не подогнаны друг к другу, так что опорный объект 25 отображен неправильно.
Созданный камерой 20 видеосигнал V оценивается устройством 15 обработки сигнала, при этом оно сначала снова распознает в видеосигнале V опорный объект 25, который был заранее внесен в память устройства обработки данных.
Затем устройство 15 обработки данных на основании верхнего частичного изображения 60 и нижнего частичного изображения 65 проверяет, совпадает ли полностью и не искажен ли созданный в видеосигнале V опорный объект 25 с внесенным в память опорным объектом.
Если это так, как показано на Фиг.4, то устройство 15 обработки данных создает в качестве сигнала Sx местоположения двоичный выходной сигнал. Двоичный выходной сигнал может, например, содержать логическую 1, когда расстояние x(t) соответствует заданному значению x0 расстояния и частичные изображения согласованы друг с другом. Если же расстояние x(t) до опорного объекта 25 не соответствует заданному значению x0 расстояния и в соответствии с этим оба частичных изображения не подогнаны друг к другу, то в качестве сигнала Sx местоположения создается двоичный выходной сигнал с логическим 0. В изображениях, согласно Фиг.2, 3 и 5, опорный объект 25, как указывалось выше, изображен неправильно, так что в этом случае в качестве двоичного выходного сигнала создается логический 0 (см. Фиг.6).
Двоичный выходной сигнал Sx можно применять, например, для снабжения автоматического управления поездом, такого как, например, устройство АТО, сигналом местоположения, с целью обеспечения возможности правильной работы управления поездом. Однако наряду с использованием устройства 10 лишь для определения местоположения его можно также использовать для распознавания остановки. Если, например, рельсовое транспортное средство 5 расположено в месте остановки на расстоянии x(t) от опорного объекта 25, которое соответствует заданному значению x0 расстояния, то устройство 15 обработки данных может контролировать, действительно ли рельсовое транспортное средство 5 стоит неподвижно. Пока рельсовое транспортное средство 5 не движется, сигнал местоположения имеет логическую 1. Если сигнал местоположения изменяется с логической 1 на логический 0, то это означает, что рельсовое транспортное средство 5 сдвинулось, при этом оно может иметь как большее расстояние до опорного объекта 25, так и меньшее расстояние до него.
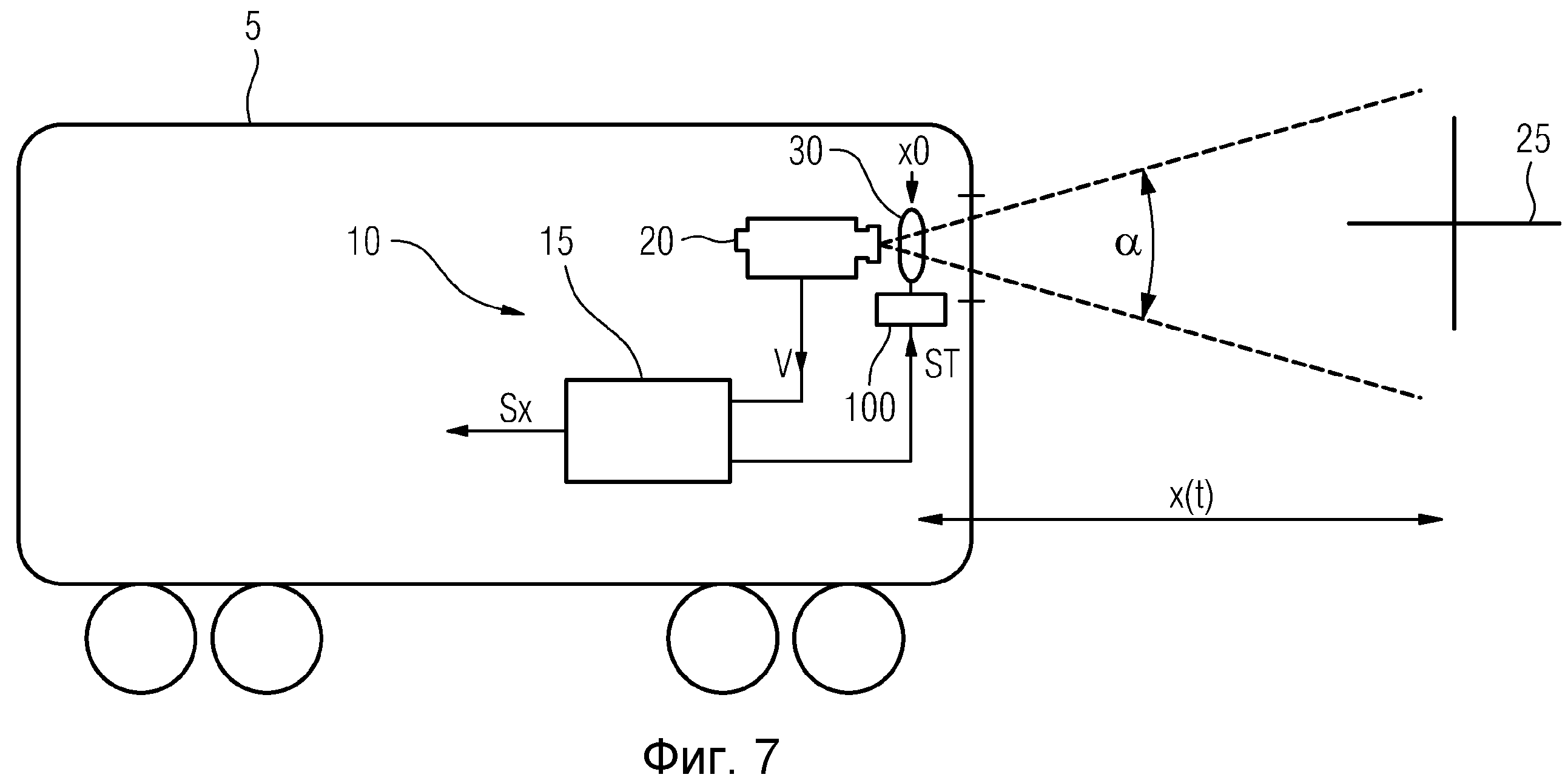
На Фиг.7 показан второй пример выполнения рельсового транспортного средства 7 с устройством 10 для создания сигнала Sx местоположения. В отличие от показанного на Фиг.1 примера выполнения устройство 30 измерения расстояния на основе разделенных изображений имеет дополнительно устройство 100 регулировки, с помощью которого под управлением управляющего сигнала ST можно регулировать заданное значение x0 устройства 30 измерения расстояния на основе разделенных изображений. Таким образом, в отличие от показанного на Фиг.1 примера выполнения можно для каждого расстояния x(t) между рельсовым транспортным средством 5 и опорным объектом 25 устанавливать совпадение между верхним частичным изображением и нижним частичным изображением 65 относительно опорного объекта 25.
Если, например, устройство 15 обработки данных устанавливает, что верхнее частичное изображение 60 не подогнано к нижнему частичному изображению 65, соответственно, что отсутствует совпадение (см. Фиг.8), то создается управляющий сигнал ST, с помощью которого заданное значение x0 расстояния устройства 15 обработки данных устанавливается так, что оба частичных изображения 60 и 65 совпадают друг с другом относительно опорного объекта 25, и имеется совпадение относительно места соединения. Это показано в качестве примера на Фиг.9. После совмещения обоих частичных изображений 60 и 65, соответственно, после согласующего сдвига, устройство 15 обработки данных на основании выданного для регулировки устройством 15 регулировки управляющего сигнала определяет, какое расстояние имеется между рельсовым транспортным средством 5 и опорным объектом 25.
Для этого можно использовать сравнительную, соответственно, калибровочную кривую, показанную на Фиг.10. На Фиг.10 показан график установки расстояния устройства 30 измерения расстояния на основе разделенных изображений в зависимости от прикладываемого управляющего сигнала ST. Установка расстояния обозначена позицией E(ST).
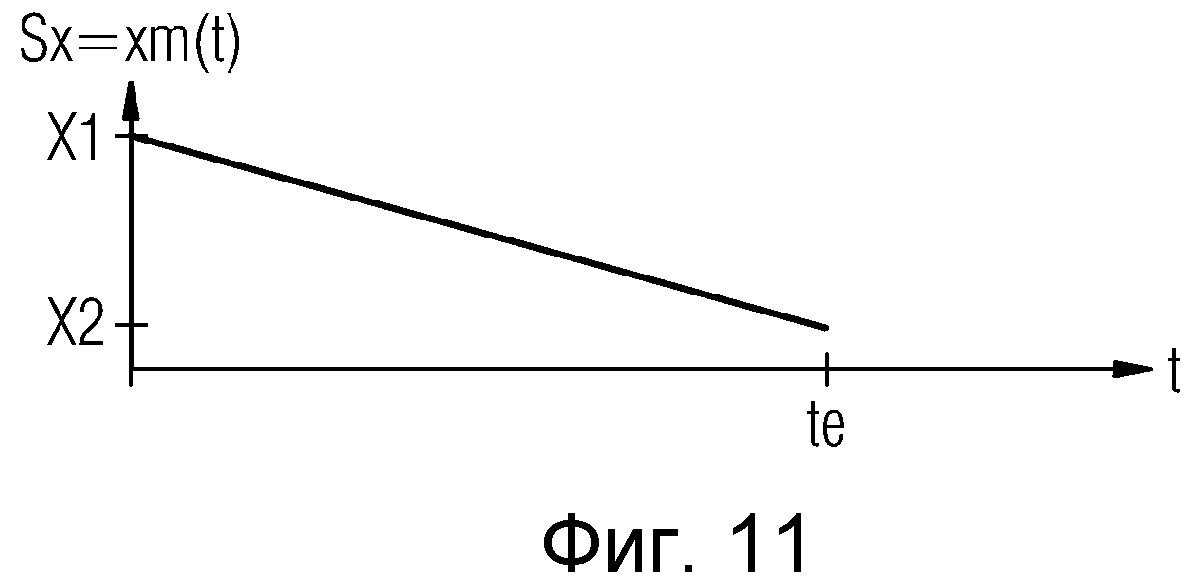
Посредством считывания калибровочной кривой, согласно Фиг.10, устройство 15 обработки данных определяет соответствующее расстояние x(t) между рельсовым транспортным средством 5 и опорным объектом 25 и выдает в качестве сигнала 3x местоположения измеренное значение xm(t) расстояния. Таким образом, измеренное значение xm(t) расстояния указывает соответствующее расстояние между рельсовым транспортным средством 5 и опорным объектом 25. На Фиг.11 показан в качестве примера ход изменения измеренного значения xm(t). Можно видеть, что рельсовое транспортное средство 5 приближается к опорному объекту 25, поскольку измеренное расстояние между рельсовым транспортным средством 5 и опорным объектом 25 становится меньше.
Кроме того, можно видеть, что в момент времени te измерение заканчивается и больше не выдается измеренное значение расстояния. Это может вызываться, например, тем, что рельсовое транспортное средство 5 проехало мимо опорного объекта 25 и/или опорный объект 25 больше не находится внутри угла α обзора камеры 20.
Выскальзывание, соответственно, выход опорного объекта 25 из угла α обзора можно предотвращать, соответственно, замедлять, когда предусмотрена возможность регулирования камеры 20 относительно ее угла α обзора, как указывалось выше.
На Фиг.12 показан третий пример выполнения рельсового транспортного средства 5 с устройством 10 для создания сигнала Sx местоположения. Устройство 10 имеет вместо устройства 10 измерения расстояния на основе разделенных изображений устройство 30' для измерения расстояния на основе совпадения контуров, которое предварительно установлено на неизменно заданное значение x0 расстояния.
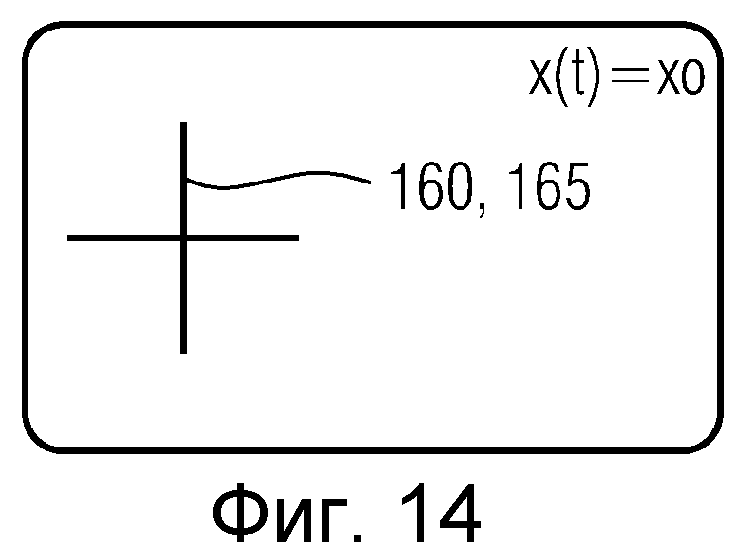
В отличие от устройства 30 измерения расстояния на основе разделенных изображений, согласно Фиг.1 и 7, устройство 30' измерения расстояния на основе совпадения контуров выдает не отдельные частичные изображения, которые пространственно лежат рядом друг с другом и должны в месте разреза согласовываться, соответственно, совмещаться, а вместо этого - два лежащих друг над другом частичных изображения. Таким образом, выдаваемый камерой видеосигнал V создает два частичных изображения опорного объекта 25, которые обозначены на Фиг.13 и 14 позициями 160 и 165.
Не совпадающие частичные изображения 160 и 165 показаны в качестве примера на Фиг.13. На основании отсутствия совпадении обоих частичных измеренных изображений 160 и 165 можно делать вывод, что расстояние между рельсовым транспортным средством 5 и опорным объектом 25 не соответствует заданному значению x0 расстояния, которое задано устройству 30' измерения расстояния на основе совпадения контуров.
Лишь когда оба частичных изображения 160 и 165 лежат друг над другом, как показано в качестве примера на Фиг.14, расстояние между рельсовым транспортным средством 5 и опорным объектом 25 соответствует заданному значению x0 расстояния.
В целом, принцип действия устройства 30' измерения расстояния на основе совпадения контуров по существу соответствует принципу действия устройства 30 измерения расстояния на основе разделенных изображений, поскольку оба устройства работают с заданным значением x0 расстояния. В соответствии с этим, устройство 30' измерения расстояния на основе совпадения контуров может выдавать выходной сигнал S, как было пояснено выше применительно к Фиг.6.
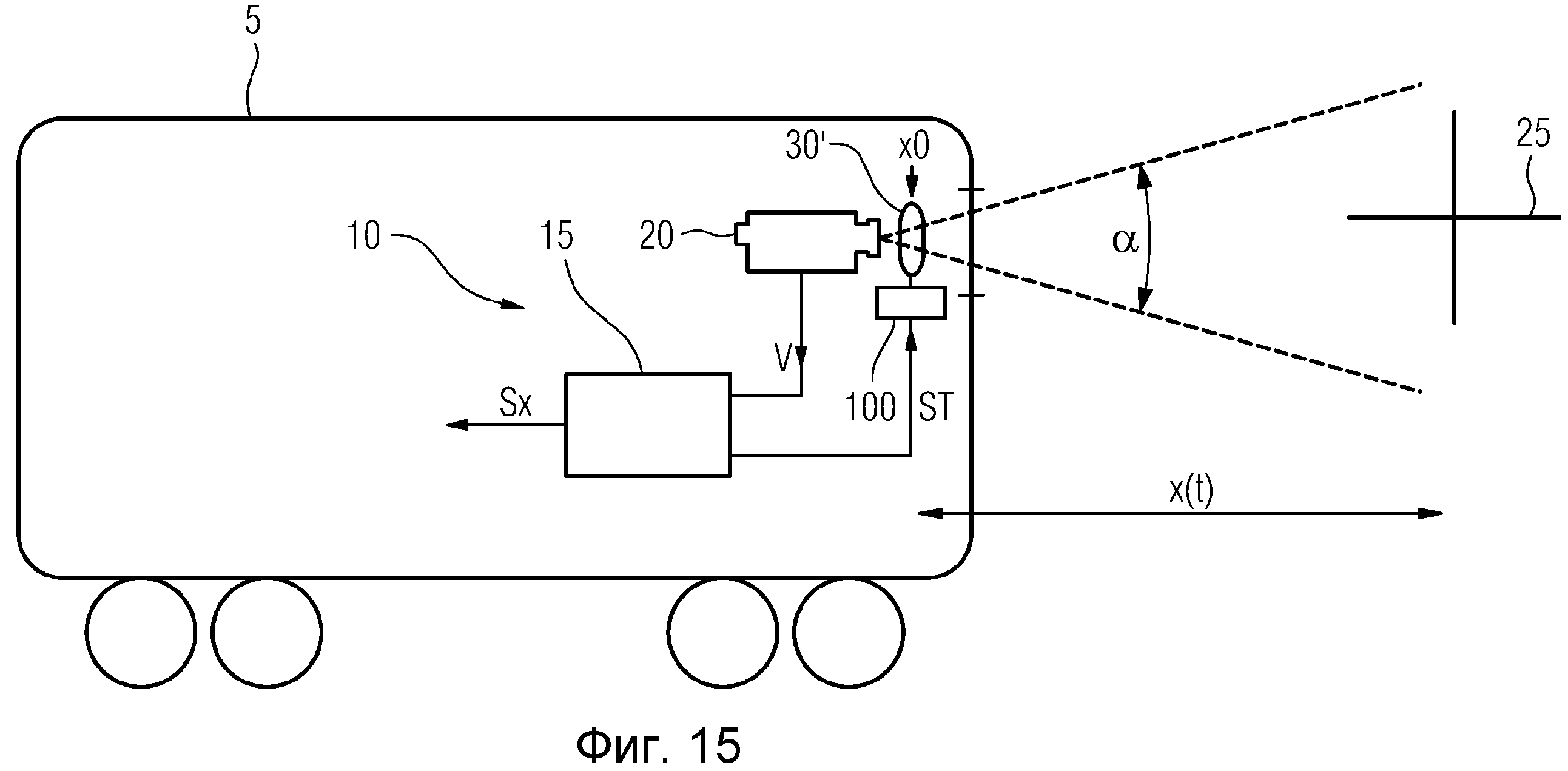
На Фиг.15 показан другой пример выполнения рельсового транспортного средства 5 с устройством 10 для создания сигнала 3x местоположения. В этом примере выполнения имеется устройство 30' измерения расстояния на основе совпадения контуров, которое дополнительно снабжено устройством 100 регулировки. Устройство 100 регулировки соединено с устройством 15 обработки данных и управляется им с помощью управляющего сигнала x(t).
Как указывалось выше, устройство 30' измерения расстояния на основе совпадения контуров создает два частичных изображения 160 и 165 опорного объекта 25, которые в зависимости от заданного устройством 30' измерения расстояния на основе совпадения контуров значения x0 расстояния лежат или не лежат друг на друге. Если устройство 15 обработки данных определяет, что оба частичных изображения 160 и 165 не лежат друг на друге, как это показано на Фиг.13, то оно с помощью управляющего сигнала ST и с помощью устройства 100 регулировки изменяет заданное значение x0 расстояния устройства 30' измерения расстояния на основе совпадения контуров таким образом, что достигается совпадение. Такое совпадение показано, как уже пояснялось, на Фиг.14.
Затем устройство 15 обработки данных на основании калибровочной кривой, согласно Фиг.10, определяет, какой параметр установки E(ST) соответствует управляющему сигналу ST и на основании определяемого параметра установки расстояния устройства 100 регулировки, соответственно, устройство 30' измерения расстояния на основе совпадения контуров определяет, какое действительное расстояние x(t) имеет рельсовое транспортное средство 5 от опорного объекта 25. Соответствующее измеренное значение xm(t) расстояния выдается в качестве сигнала Sx местоположения. Например, при измерении расстояния x(t) можно получать сигнал Sx расстояния, как это показано на Фиг.11.
В связи с показанными примерами выполнения было пояснено, как можно создавать сигнал Sx местоположения, будь то в виде измеренного значения xm(t) расстояния (см. Фиг.11) или в виде двоичного сигнала (см. Фиг.6). Кроме того, на основании сигнала Sx местоположения можно осуществлять распознавание остановки транспортного средства тем, что наблюдается, соответственно, измеряется и оценивается ход изменения во времени, соответственно, изменение во времени сигнала Sx местоположения. Например, можно делать вывод о движении транспортного средства всегда тогда, когда изменяется сигнал местоположения. Однако во многих случаях предпочтительно разрешать определенный допуск сигнала Sx местоположения и определенное изменение во времени сигнала Sx местоположения, т.е., например, определенное колебание или уход сигнала Sx местоположения, без вывода непосредственно или тотчас о недопустимом движении транспортного средства. Для обеспечения такой оценки и допусков предпочтительно, когда сигнал Sx местоположения подвергается фильтрации, например цифровой или числовой фильтрации (например, в устройстве 15 обработки данных), и фильтрованный сигнал местоположения оценивается относительно неподвижности транспортного средства. Другими словами, предпочтительно, когда с помощью (например, цифрового) фильтрованного сигнала местоположения создается сигнал распознавания неподвижности.
Элемент теплозащитного экрана
Газовая турбина с уплотнительными пластинами на турбинном диске
Сотовое уплотнение и способ его изготовления
Газотурбинная установка, утилизационный парогенератор и способ эксплуатации утилизационного парогенератора
Электрическая машина с осевым, радиально смещенным охлаждающим потоком и соответствующий способ
Вакуумный выключатель с неподвижно соединенными с шинами на обеих сторонах контактными зажимами
Трансформатор среднего и низкого напряжения со ступенчатым переключением и способ его эскплуатации
Способ регулировки клапана
Система теплозащитного экрана с элементами для вхождения винтов и способ монтажа элемента теплозащитного экрана
Газотурбинный двигатель
Устройство сгорания
Уплотнительный элемент, сопловое устройство газовой турбины и газовая турбина
Резонатор гельмгольца для камеры сгорания газовой турбины
Электрическая машина, в частности, погружной электродвигатель с защищенным статором
Реактор с бегущим полем и способ отделения намагничивающихся частиц от жидкости
Схема и способ контроля нагрузочного тока и устройство управления противопожарной сигнализацией
Расширенная автоматизированная система энергоснабжения
Опора для сиденья в консольном выполнении
Способ функционирования судового приводного двигателя, питаемого инвертором с широтно-импульсной модуляцией, а также система судового привода
Электрическая машина с контролем функции заземления и способ

