Результат интеллектуальной деятельности: СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в обзорных радиолокационных станциях (РЛС) с двумерным электронным сканированием и механическим вращением антенны по азимуту при обзоре пространства последовательным перемещением луча.
Известен способ обзора пространства радиолокационной станцией с последовательным перемещением луча столбцами по углу места с заданным шагом с помощью электронного сканирования, а по азимуту - за счет механического вращения антенны, при котором в каждом положении луча излучают зондирующий сигнал, принятый затем в том же положении луча отраженный сигнал в каждой дискрете по дальности сравнивают с порогом обнаружения, при превышении которого принимают решение об обнаружении цели (Справочник по радиолокации. Под ред. М. Сколника, том 1. - М., 1976, с.180, 1-й абзац).
Недостатком известного способа являются значительные временные и энергетические затраты при обзоре. Это объясняется тем, что энергию зондирующего сигнала, излучаемого в каждом положении луча зоны обзора, определяют исходя из требуемой (обычно достаточно высокой) вероятности обнаружения цели при заданной (обычно достаточно низкой) вероятности ложной тревоги. А поскольку цели, как правило, находятся далеко не в каждом положении луча, то значительная часть времени (энергии) РЛС расходуется в положениях, где целей нет.
Суммарные временные затраты на обзор в известном способе определяются из выражения:

где n0 - количество импульсов, которое излучается в каждом положении луча зоны обзора для обнаружения цели с требуемой вероятностью;
Nл - количество положений луча в зоне обзора РЛС;
Δtз - длительность периода зондирующего импульса.
Наиболее близким к заявляемому является способ обзора пространства радиолокационной станцией с последовательным перемещением луча столбцами с помощью электронного сканирования по азимуту и механическим вращением по азимуту и двухэтапным обнаружением сигнала от цели. Способ заключается в следующем.
При обзоре пространства в каждом положении луча излучают зондирующий сигнал первого этапа обнаружения, принимают отраженный сигнал и во всех дискретах по дальности принятый сигнал сравнивают с порогом первого этапа обнаружения. Если хотя бы в одной дискрете по дальности на первом этапе обнаружения произошло превышение порога обнаружения, то в этом же положении луча излучают второй зондирующий сигнал (сигнал второго этапа обнаружения), принимают отраженный сигнал и в дискретах по дальности, соответствующих дискретам, в которых произошло превышение порога первого этапа обнаружения, сравнивают его с порогом второго этапа обнаружения. Выбор дискрет по дальности, в которых производят сравнение принятого сигнала с порогом второго этапа обнаружения, осуществляют с учетом ошибок измерения дальности и возможного перемещения цели за время между моментами излучения зондирующих сигналов на этапах обнаружения (Справочник по радиолокации. Под ред. М. Сколника, том 1. - М, 1976, с.200).
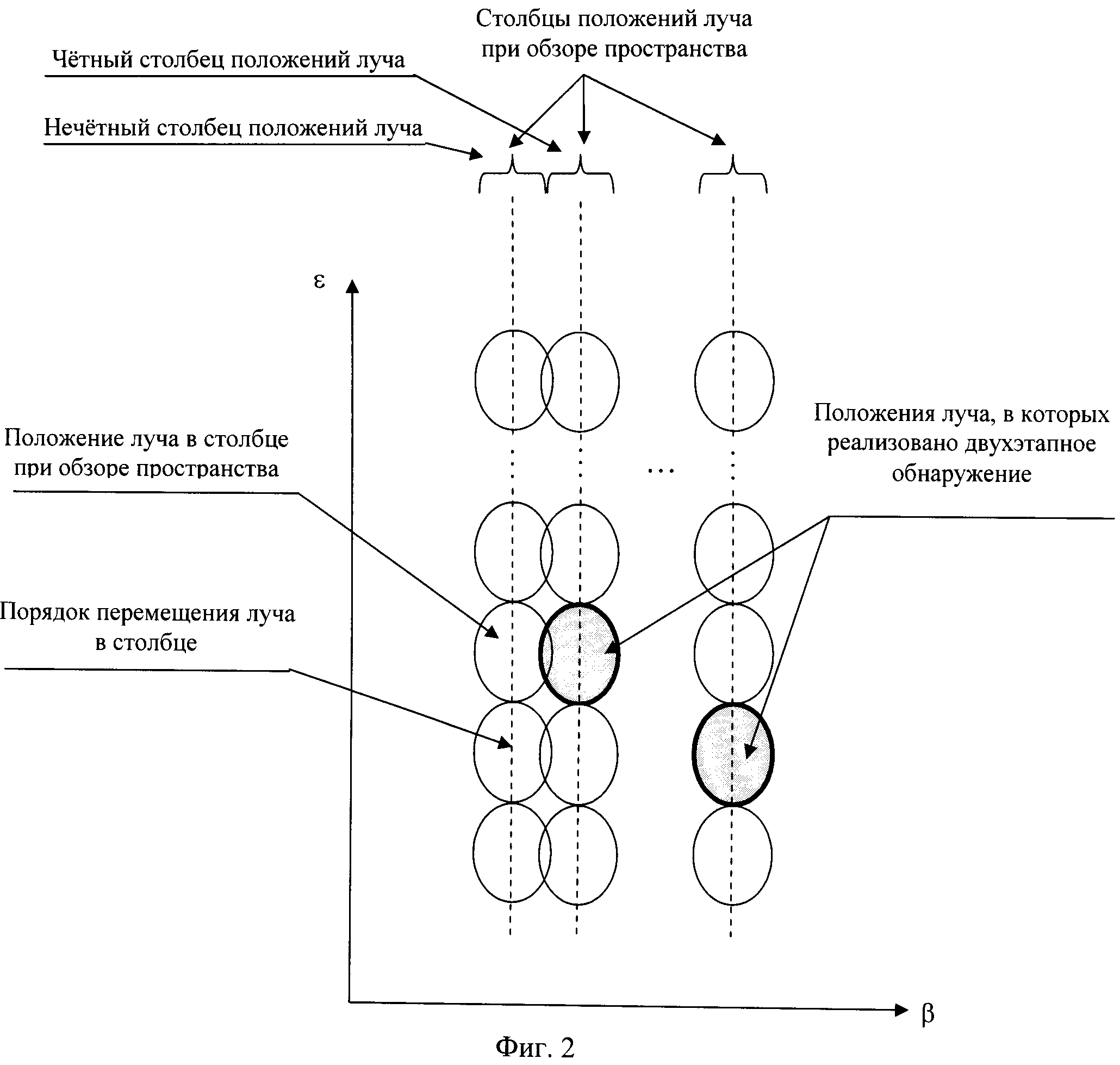
В наиболее близком способе луч при обзоре пространства последовательно перемещается линейными столбцами по углу места с заданным шагом с помощью электронного сканирования, а по азимуту - за счет вращения антенны. Четные/нечетные столбцы зоны обзора могут быть смещены по углу места относительно нечетных/четных столбцов (фиг.1) или могут быть без смещения по углу места (фиг.2). На чертежах эллипсами с серой заливкой и жирной границей обозначены сечения луча в положениях, в которых принимается решение о двухэтапном обнаружении сигнала.
Зондирующий сигнал второго этапа обнаружения излучается только в положениях луча, в которых принятым на первом этапе обнаружения сигналом превышен порог первого этапа обнаружения. Этим достигается экономия энергии, излучаемой в зоне обзора.
Суммарные временные затраты на обзор при двухэтапном обнаружении в наиболее близком способе определяются из выражения:

где n1 и n2 - количество импульсов, излучаемых в положении луча зоны обзора на первом и втором этапах обнаружения соответственно, n1+n2=n0;
k - количество вторых этапов.
Однако упомянутая экономия имеет место при относительно небольшом количестве целей и помех в зоне обзора (при малой величине k).
При нормальной (среднестатистической) целевой и помеховой обстановке количество положений луча в зоне обзора, в которых реализуется второй этап обнаружения, не превышает 20% от количества положений луча, в которых произошло превышение порога первого этапа обнаружения (k=0.2). В этом случае применение двухэтапного обнаружения эффективно, поскольку позволяет при обзоре пространства экономить временные и энергетические ресурсы РЛС.
В сложной целевой и помеховой обстановке, когда целей и помех в зоне обзора много во многих положениях луча, суммарные временные затраты на обзор зоны в наиболее близком способе могут достигать предельно большой величины (при k=1), равной:

В этом случае затраты времени в наиболее близком способе становятся равными затратам в известном способе (1), то есть применение наиболее близкого способа оказывается неэффективным.
Таким образом, недостатком наиболее близкого способа является увеличение временных и энергетических затрат при обзоре пространства в условиях большого количества целей и помех во многих положениях луча.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является уменьшение временных и энергетических затрат при обзоре пространства радиолокационной станцией в условиях большого количества целей и помех во многих положениях луча.
Указанный технический результат достигается тем, что в способе обзора пространства радиолокационной станцией с электронным сканированием лучом антенны и вращением антенны по азимуту с последовательным перемещением луча столбцами по углу места, двухэтапным обнаружением сигнала, отраженного от цели, включающем излучение зондирующего сигнала в каждом положении луча в столбце, прием отраженного сигнала, сравнение принятого сигнала во всех дискретах по дальности с порогом первого этапа обнаружения, сравнение принятого сигнала с порогом второго этапа обнаружения и принятие решения об обнаружении цели при превышении указанного порога, при этом выбор дискрет по дальности, в которых осуществляют сравнение принятого сигнала с порогом второго этапа обнаружения, производят с учетом ошибок измерения дальности и возможного перемещения цели за время между моментами излучения зондирующих сигналов на этапах обнаружения, согласно изобретению луч в столбце перемещают зигзагообразно с помощью двумерного электронного сканирования, при этом по углу места луч перемещают с постоянным или переменным шагом, не превышающим ширину луча по углу места по уровню половинной мощности, каждое перемещение луча по азимуту в столбце кроме первого перемещения осуществляют в направлении, противоположном предыдущему, первое в столбце перемещение луча по азимуту осуществляют в направлении, совпадающем с направлением вращения антенны, при этом луч по азимуту в столбце перемещают с шагом, не превышающим половину ширины луча по азимуту по уровню половинной мощности, сравнение сигнала, принятого в положении луча в столбце в данный момент времени, с порогом второго этапа обнаружения осуществляют в упомянутых дискретах по дальности, в которых хотя бы в одном из двух соседних положений луча в столбце, осмотренных в предыдущие моменты времени, произошло превышение порога первого этапа обнаружения.
Суть заявляемого технического решения заключается в том, что при двухэтапном обнаружении сигнала, отраженного от цели, в текущем положении луча в столбце используются сигналы, принятые в предыдущие моменты времени в ближайших соседних положениях луча в этом столбце.
Возможность такого технического решения основана на следующих двух предпосылках.
Во-первых, известно, что ближе некоторой дальности отраженные от цели сигналы, вследствие перекрытия диаграммы направленности антенны при последовательном перемещении луча, обнаруживаются в нескольких соседних положениях луча, то есть по цели формируется угловой пакет (пачка) обнаруженных сигналов (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, с.43-45). Наличие углового пакета сигналов, отраженных от цели, позволяет совместить обнаружение цели на этапах обнаружения с обзором пространства и этим сэкономить временные и энергетические ресурсы РЛС.
Во-вторых, известно, что сигналы, излучаемые на первом и втором этапах двухэтапного обнаружения, а также количество излучаемых на этапах импульсов (n1 и n2) без существенного ущерба для оптимальности могут быть приняты одинаковыми (Справочник по радиолокации. Под ред. М.Сколника, том 1. - М., 1976, с.201). Это позволяет один и тот же сигнал использовать на обоих этапах обнаружения.
В заявляемом изобретении обзор пространства осуществляется зигзагообразным последовательным перемещением луча в столбце с помощью двумерного электронного сканирования (на фиг.3 и фиг.4 порядок обзора столбца обозначен штриховыми стрелками) и механического вращения антенны. Такой столбец осматривается за один проход вместо двух столбцов наиболее близкого способа, осматриваемых за два прохода. При этом появляется возможность формировать в столбце угловые пакеты по сигналам от цели, принятым через минимальные интервалы времени, по обеим координатам и последовательно использовать их в двухэтапном обнаружении.
Сравнение сигнала, принятого в положении луча в столбце в данный момент времени, с порогом второго этапа обнаружения осуществляют в дискретах по дальности, соответствующих дискретам, в которых хотя бы в одном из двух соседних положений луча в предыдущие моменты времени произошло превышение порога первого этапа обнаружения. Выбор упомянутых дискрет по дальности производят с учетом ошибок измерения дальности и возможного перемещения цели за время между моментами излучения зондирующих сигналов на этапах обнаружения.
На фиг.3 и фиг.4 эллипсами с серой заливкой и жирной границей обозначены сечения луча в положениях, в которых принимается решение о двухэтапном обнаружении сигнала. Первым этапом обнаружения в каждом таком случае является превышение порога первого этапа обнаружения в одном из двух соседних положений луча, обозначенных серой заливкой и тонкой границей.
В каждом положении луча в столбце, кроме первого положения (первым положением луча в столбце может быть крайнее нижнее или крайнее верхнее положение луча, в зависимости от порядка обзора столбца), может реализовываться и первый, и второй этапы обнаружения. Изучение сигнала первого этапа обнаружения, по аналогии с прототипом, осуществляется во всех положениях луча зоны обзора.
Второй этап обнаружения реализуется в положении луча столбца в данный момент времени только в случае, если в какой-либо дискрете по дальности в этом положении луча принятый сигнал превысил порог второго этапа обнаружения, а в одном из двух соседних положений луча в этой же по дальности произошло превышение порога обнаружения первого этапа обнаружения. Так как на обоих этапах обнаружения используются одни и те же сигналы и специальных сигналов для второго этапа не излучается, то время (энергия), затрачиваемое на обзор зоны, остается постоянным независимо от помеховой обстановки.
Поскольку для работы способа необходимо, чтобы обнаружение цели осуществлялось не менее чем в двух соседних положениях луча (то есть по отраженному сигналу должен формироваться угловой пакет), то шаг перемещения луча в столбце должен быть достаточно мал: он не должен превышать половину ширины луча по уровню половинной мощности хотя бы одной из угловых координат. Обычно зона обзора РЛС по углу места жестко задана, поэтому наиболее целесообразно устанавливать малый шаг луча по азимуту. Таким образом шаг перемещения луча в столбце по углу места не должен превышать ширины луча по углу места, а по азимуту - ширину луча по азимуту по уровню половинной мощности.
Суммарные временные затраты в заявляемом способе определяются из выражения:

Величина выигрыша во временных затратах в заявляемом способе относительно наиболее близкого способа следует из выражений (2) и (4) с учетом того, что n2=n1, в виде:
В выражении (5) величина l+k больше единицы при любом значении k>0, что означает, что временные затраты в заявляемом способе в любой целевой и помеховой обстановке всегда меньше, чем временные затраты в наиболее близком способе.
Важно отметить, что эффективность заявляемого способа, то есть выигрыш во временных и энергетических затратах, увеличивается с ростом напряженности целевой и помеховой обстановки (то есть с увеличением величины k).
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами:
Фиг.1 - обзор зоны в наиболее близком способе, когда соседние столбцы смещены по углу места.
Фиг.2 - обзор зоны в наиболее близком способе, когда соседние столбцы не смещены по углу места.
Фиг.3 - обзор зоны в заявляемом способе, луч в столбце перемещают зигзагообразно с шагом по углу места, равным 0.5θε, по азимуту - с шагом, равным 0.5θβ, причем каждое перемещение луча по азимуту в столбце осуществляют в направлении, противоположном предыдущему, где θβ и θε - ширина луча по уровню половинной мощности по азимуту и углу места соответственно. Эллипсами с серой заливкой и жирной границей обозначены сечения луча в положениях, в которых принимается решение о двухэтапном обнаружении сигнала. Первым этапом обнаружения в каждом таком случае является превышение порога первого этапа обнаружения в одном из соседних положения луча, обозначенных серой заливкой и тонкой границей.
Фиг.4 - обзор зоны в заявляемом способе, луч в столбце перемещают зигзагообразно с переменным шагом по углу места (чередующимися от положения к положению луча значениями, равными нулю и θε), по азимуту - с шагом, равным 0.5θβ, причем каждое перемещение луча по азимуту в столбце осуществляют в направлении, противоположном предыдущему.
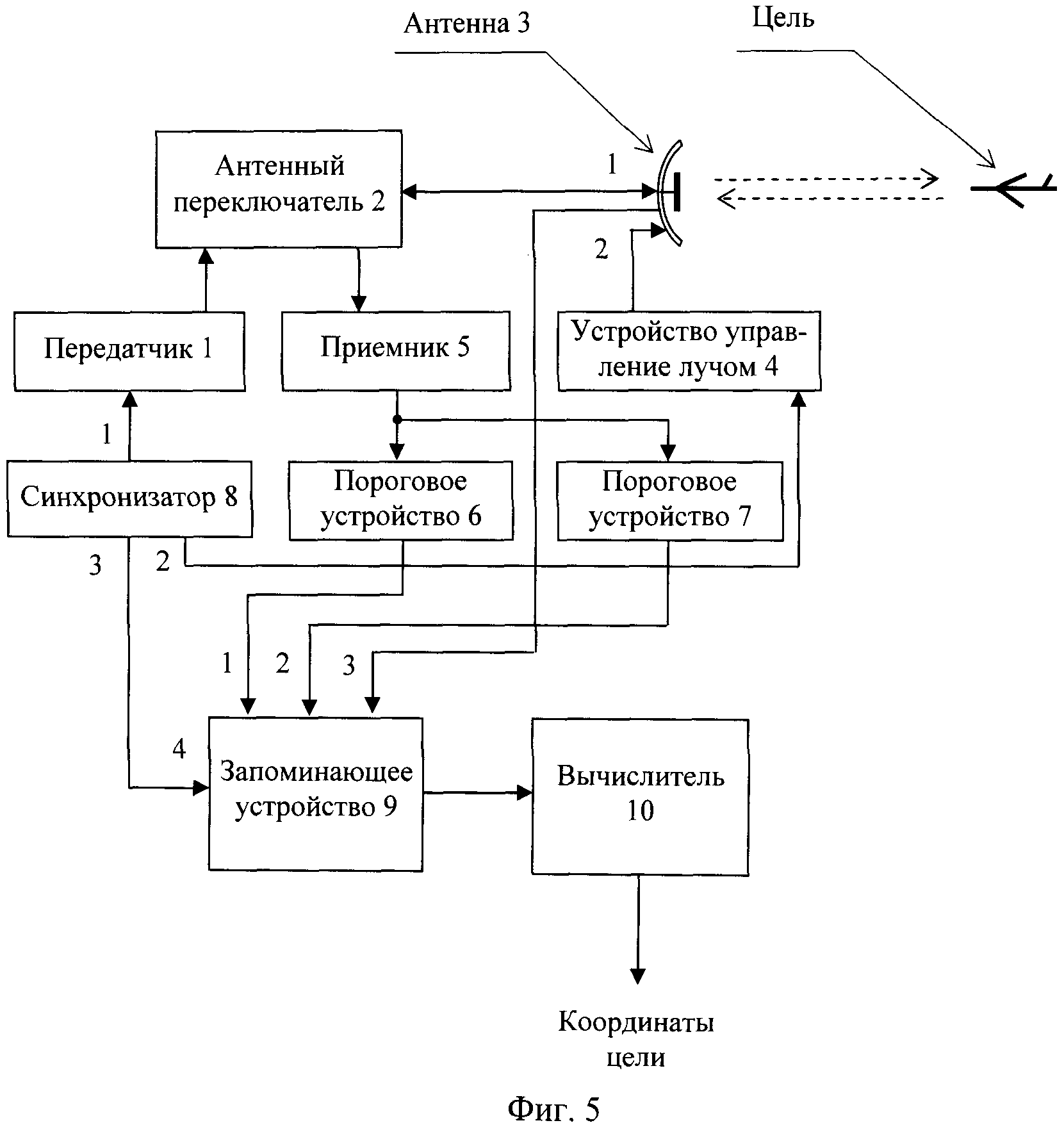
Фиг.5 - функциональная схема радиолокационной станции, реализующей заявляемый способ.
Заявляемый способ может быть реализован в РЛС (фиг.5), содержащей передатчик 1, антенный переключатель 2, антенну 3, устройство управления лучом 4, приемник 5, пороговое устройство 6, пороговое устройство 7, синхронизатор 8, запоминающее устройство 9, вычислитель 10, при этом вход передатчика 1 соединен с первым выходом синхронизатора 8, выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с первым входом/выходом антенны 3, второй управляющий вход антенны 3 соединен с выходом устройства управления лучом 4, вход которого соединен со вторым выходом синхронизатора 8, выход антенного переключателя 2 соединен со входом приемника 5, выход которого соединен со входом порогового устройства 6 и со входом порогового устройства 7, выход порогового устройства 6, выход порогового устройства 7, координатный выход антенны 3 и третий выход синхронизатора 8 соединены соответственно с первым, вторым, третьим и четвертым входами запоминающего устройства 9, выход которого соединен со входом вычислителя 10, выход вычислителя 10 является выходом РЛС.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием лучом по обеим угловым координатам (двумерным сканированием) и с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, том 2. - М, 1977, с.132-138).
Устройство управления лучом 4 - вычислитель, выполненный на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М., 1984). Реализует функцию расчета положения луча в пространстве перед каждым излучением зондирующего сигнала.
Приемник 5 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Пороговое устройство 6, пороговое устройство 7, запоминающее устройство 9 выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М., 1984).
Синхронизатор 8 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М., 1970, с.602-603).
Вычислитель 10 выполнен на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М., 1984). Реализует функцию определения номеров дискрет по дальности, в которых произошло превышение порога обнаружения.
Работа РЛС происходит следующим образом. В передатчике 1 по командам синхронизатора 8 (импульсам синхронизации) формируются зондирующие сигналы, которые посредством антенного переключателя 2 подаются на первый вход/выход антенны 3. Положение луча антенны 3 определяется в устройстве управления лучом 4, с выхода которого по команде синхронизатора 8 на второй управляющий вход антенны 3 подаются координаты луча (азимут и угол места) в соответствии с заданной программой обзора пространства зигзагообразными столбцами положений луча. Отраженные сигналы принимаются антенной 3 и через антенный переключатель 2 поступают на вход приемника 5.
С выхода приемника 5 сигналы подаются на вход порогового устройства 6 и вход порогового устройства 7, в которых принятые сигналы сравниваются с порогами первого и второго этапов обнаружения соответственно. Сигналы, уровень которых превышает пороговый, проходят на выходы пороговых устройств. Сигналы с выходов порогового устройства 6, порогового устройства 7 и сигналы, пропорциональные координатам луча антенны 3, поступают соответственно на первый, второй и третий входы запоминающего устройства 9, где в ходе обзора зоны запоминаются.
По командам с синхронизатора 8 из запоминающего устройства 9 извлекаются записанные в них данные трех последовательных положений луча в столбце и подаются в вычислитель 10. В вычислителе 10 в этих положениях луча осуществляется поиск дискрет по дальности, в которых произошло превышение порога второго этапа обнаружения (с учетом ошибок измерения дальности и возможного перемещения цели по дальности за время между этапами) в текущем положении луча и порога первого этапа обнаружения хотя бы в одном из предыдущих соседних положений луча. Для этих дискрет принимается решение об обнаружении сигналов от целей. Координаты обнаруженных целей выдаются с выхода вычислителя 10.
Таким образом, в РЛС, реализующей заявляемый способ двухэтапного обнаружения сигнала от цели, достигается заявляемый технический результат.
Способ обзора пространства радиолокационной станцией с электронным сканированием лучом антенны и вращением антенны по азимуту с последовательным перемещением луча столбцами по углу места, двухэтапным обнаружением сигнала, отраженного от цели, включающий излучение зондирующего сигнала в каждом положении луча в столбце, прием отраженного сигнала, сравнение принятого сигнала во всех дискретах по дальности с порогом первого этапа обнаружения, сравнение принятого сигнала с порогом второго этапа обнаружения и принятие решения об обнаружении цели при превышении указанного порога, при этом выбор дискрет по дальности, в которых осуществляют сравнение принятого сигнала с порогом второго этапа обнаружения, производят с учетом ошибок измерения дальности и возможного перемещения цели за время между моментами излучения зондирующих сигналов на этапах обнаружения, отличающийся тем, что луч в столбце перемещают зигзагообразно с помощью двумерного электронного сканирования, при этом по углу места луч перемещают с постоянным или переменным шагом, не превышающим ширину луча по углу места по уровню половинной мощности, каждое перемещение луча по азимуту в столбце кроме первого перемещения осуществляют в направлении, противоположном предыдущему, первое в столбце перемещение луча по азимуту осуществляют в направлении, совпадающем с направлением вращения антенны, при этом луч по азимуту в столбце перемещают с шагом, не превышающим половину ширины луча по азимуту по уровню половинной мощности, сравнение сигнала, принятого в положении луча в столбце в данный момент времени, с порогом второго этапа обнаружения осуществляют в упомянутых дискретах по дальности, в которых хотя бы в одном из двух соседних положений луча в столбце, осмотренных в предыдущие моменты времени, произошло превышение порога первого этапа обнаружения.
Способ сопровождения траектории цели
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Способ обнаружения радиолокационных целей и радиолокационная станция для его реализации
Устройство фиксации грунта откоса
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны
Способ сопровождения траектории цели
Способ радиолокационного обнаружения целей и устройство для его реализации
Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации
Способ обнаружения радиолокационных целей и радиолокационная станция для его реализации
Устройство фиксации грунта откоса
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Противооползневое защитное сооружение
Способ сопровождения траектории цели
Способ защиты обзорной радиолокационной станции от пассивных помех, принимаемых по боковым лепесткам диаграммы направленности антенны

