Результат интеллектуальной деятельности: СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ
Вид РИД
Изобретение
Изобретение относится к области механических измерении, в частности к измерению массы, координат центра масс и моментов инерции изделий вытянутой вдоль продольной оси формы, имеющих момент инерции относительно своей продольной оси значительно меньший, чем моменты инерции относительно поперечных осей.
Задача управления скоростным движением изделий космической и реактивной техники, наземных и морских транспортных систем требует для своего решения знания массы, координат центра масс и моментов инерции изделий. Наиболее достоверным методом определения комплекса указанных параметров является измерение. В настоящее время в технике измерений механических величин отсутствует установившееся методология создания подобных средств измерения.
Известен комплекс для измерения массы, координат центра масс и моментов инерции машиностроительных изделий (см. В.В. Богданов, B.C. Волобуев и др. «Комплекс для измерения масс и моментов инерции машиностроительных изделий», Измерительная техника №2, 2002, с.37-39).
Комплекс включает в себя два стенда, один из которых предназначен для измерения массы и координат центра масс, другой - для измерения моментов инерции изделий. Стенд для измерения массы и координат центра масс состоит из двух рам, на горизонтальных балках которых с помощью специальных хомутов устанавливается протяженное по длине изделие цилиндрической формы. При помощи вертикальных стержней балки соединены с четырьмя динамометрами. Основания динамометров соединены с опорными стойками, которые жестко закреплены на силовом фундаменте. Вдоль стержней действуют силы реакции, которые измеряются динамометрами.
По сумме реакций динамометров измеряют массу изделия, а по комбинации реакций и известным координатам расположения динамометров - две горизонтальные координаты центра масс. Для измерения вертикальной координаты необходимо повернуть изделие на угол 90° вокруг продольной оси изделия.
Стенд для измерения моментов инерции представляет собой раму с четырьмя вертикальными пружинами, на которые с помощью специальных хомутов устанавливается изделие. В местах крепления пружин к хомутам расположены датчики перемещений, измеряющие деформацию пружин. Чтобы эти точки не смещались горизонтально, в конструкции стенда предусмотрены направляющие втулки. Таким образом, движение изделия возможно только по трем степеням свободы.
До начала измерений к пружинам прикладывается сила, которая затем мгновенно убирается и система начинает совершать свободные колебания по трем степеням свободы. В результате цифровой обработки сигналов каждого из датчиков, находятся частоты и амплитуды колебаний, используемые для определения моментов инерции изделия. Для получения трех осевых моментов инерции необходимо повернуть изделие на 90° вокруг продольной оси.
Основными недостатками данного комплекса являются следующие:
- необходимость поворота изделия на угол 90° для получения результата измерений (во многих случаях такой поворот недопустим по техническим условиям на изделие);
- измерение массы и координат центра масс производится на одном стенде, а моментов инерции - на другом, что приводит к дополнительным ошибкам измерений из-за неточного совмещения (рассогласования) осей изделия с осями стенда.
Наиболее близким конструктивным решением является созданный в ФГУП «ЦАГИ» стенд для измерения массы, координат центра масс и тензора инерции изделия машиностроения (см. патент на изобретение №2368880, МПК G01M 1/10, 2008, «Датчики и системы» №5, 2010 г. Стр. 24-28; 29-33), содержащий раму, к которой крепится изделие, динамометры, датчики угла, пружины, станину, динамометрическую платформу с узлом поворота рамы, устройства задания колебаний, состоящие из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла.
Все необходимые измерения выполняются при одной установке изделия на стенде.
Стенд имеет два режима работы - статический и динамический.
В статическом режиме при помощи динамометрической платформы измеряются масса и три координаты центра масс изделия. Горизонтальные координаты центра масс определяются по измеренным динамометрами силам. Для измерения вертикальной координаты изделию при помощи узла поворота задается ряд последовательных углов наклона. По измеренным при помощи динамометрической платформы моментам и измеренным углам наклона определяется вертикальная координата центра масс изделия.
Моменты инерции измеряются в динамическом режиме. При этом рама с изделием совершают свободные затухающие колебания последовательно вокруг трех ортогональных осей стенда. При помощи динамометрической платформы измеряются три динамических момента, по которым, используя данные датчиков угла, известные массу и координаты центра масс, при помощи аппарата цифровой обработки сигналов, определяются осевые и центробежные моменты инерции.
Указанный стенд рассчитан на изделия машиностроения, имеющие моменты инерции одного порядка относительно каждой из трех ортогональных осей.
Основным недостатком данного решения является сравнительно низкая точность измерения момента инерции относительно оси Х - вертикальной оси стенда.
В настоящее время промышленность ставит задачу измерения моментов инерции изделий, имеющих (сигарообразную) вытянутую вдоль продольной оси форму (изделия реактивной техники). Момент инерции таких изделий относительно собственной продольной оси (вертикальной оси X в системе координат стенда) значительно меньше моментов инерции относительно поперечных осей изделия (горизонтальных осей Y и Z в системе координат стенда). В результате негативное влияние на точность измерения моментов инерции относительно оси X оказывают присоединенные массы стенда в виде массивных рам, платформ и узла поворота, собственные моменты инерции которых могут быть намного больше момента инерции изделия.
При измерении моментов инерции относительно горизонтальных осей возникает иная проблема.
При помощи динамометрической платформы измеряются суммы моментов относительно ее осей - Y и Z:
 ;
;
 ;
;
где:  и
и  - искомые моменты,
- искомые моменты,
 и
и  - моменты инерционных сил, приложенных к центру масс изделия, измеренных относительно осей Y и Z динамометрической платформы.
- моменты инерционных сил, приложенных к центру масс изделия, измеренных относительно осей Y и Z динамометрической платформы.
Величины
и  часто оказываются больше, соответственно,
часто оказываются больше, соответственно,  и
и  , что отрицательно сказывается на точности измерений искомых моментов
и
.
, что отрицательно сказывается на точности измерений искомых моментов
и
.
Техническим результатом предлагаемого изобретения является повышение точности измерения моментов инерции путем уменьшения присоединенных масс стенда и непосредственного, без
и  , измерения моментов
и
, измерения моментов
и  .
.
Технический результат достигается тем, что стенд для измерения массы, координат центра масс и моментов инерции изделия, содержащий рамы, динамометры, датчики угла, пружины, станину, динамометрическую платформу, узлы поворота рам, устройства задания колебаний, состоящие из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, снабжен трехкомпонентным динамометрическим элементом, состоящим из четырех пластин, ориентированных вдоль координатных осей стенда, верхнего основания, на которое установлено изделие посредством крестовины, и нижнего основания, закрепленного на динамометрической платформе так, что начало координат трехкомпонентного динамометрического элемента находится по оси X выше, чем начало координат динамометрической платформы, которая опирается на динамометры, закрепленные в вершинах прямоугольной внутренней рамы, стороны которой параллельны горизонтальным осям Y и Z стенда и трехкомпонентного динамометрического элемента.
Для более подробного пояснения предлагаемого изобретения рассмотрим схему стенда, его конструкцию и принцип действия.
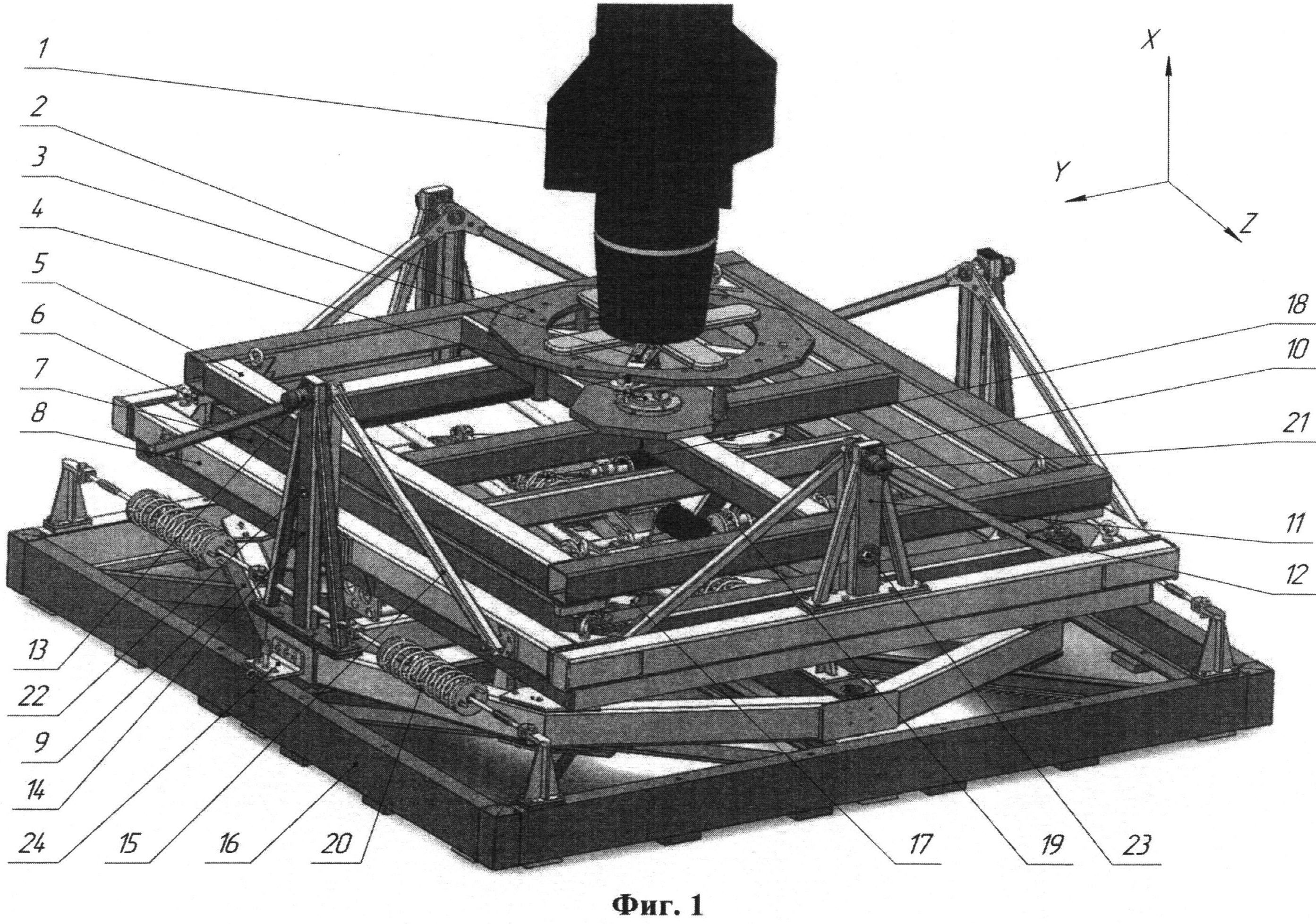
На фиг.1 показана аксонометрическая проекция конструкции стенда.
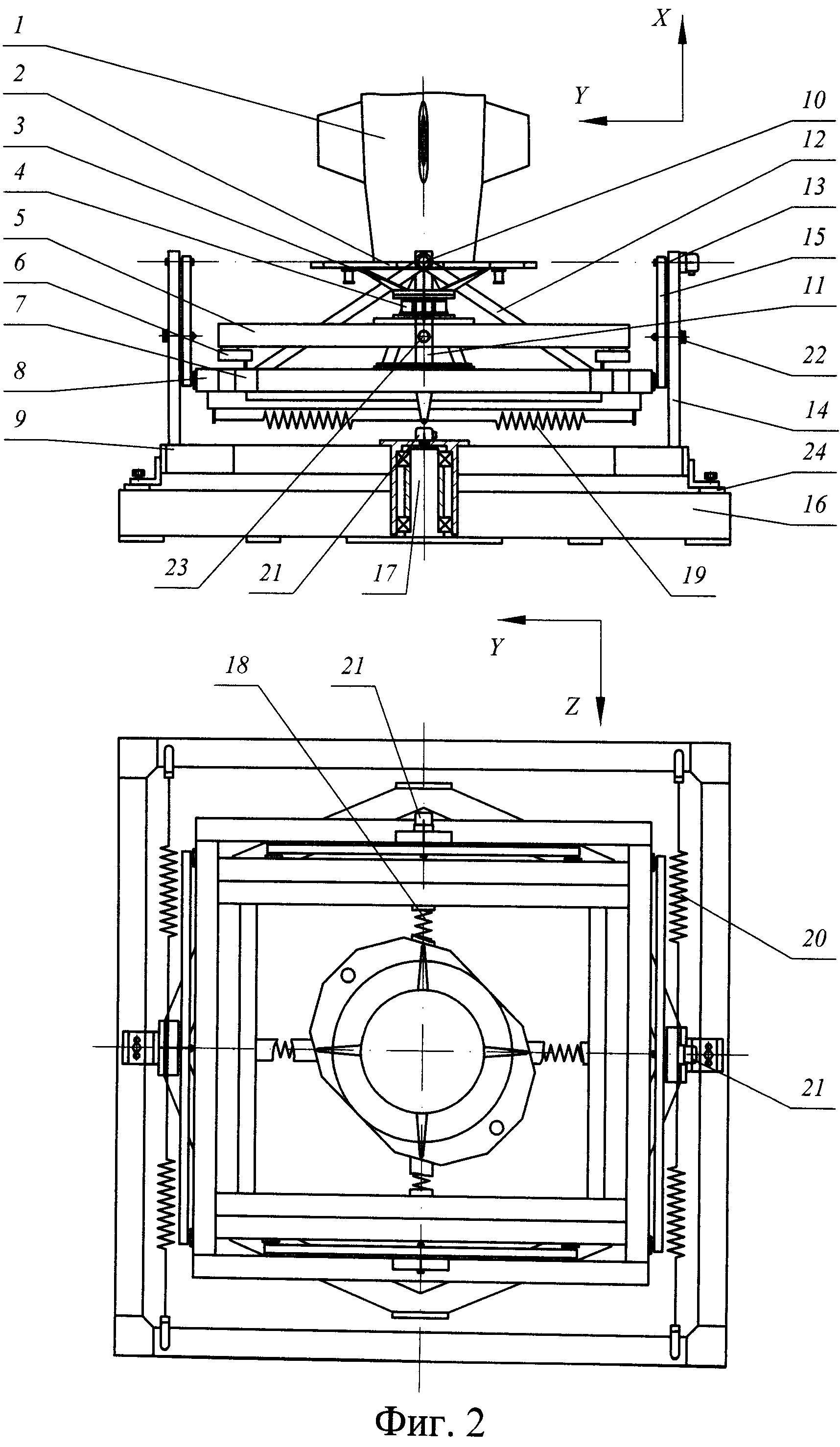
На фиг.2 - конструкция стенда в двух ортогональных проекциях.
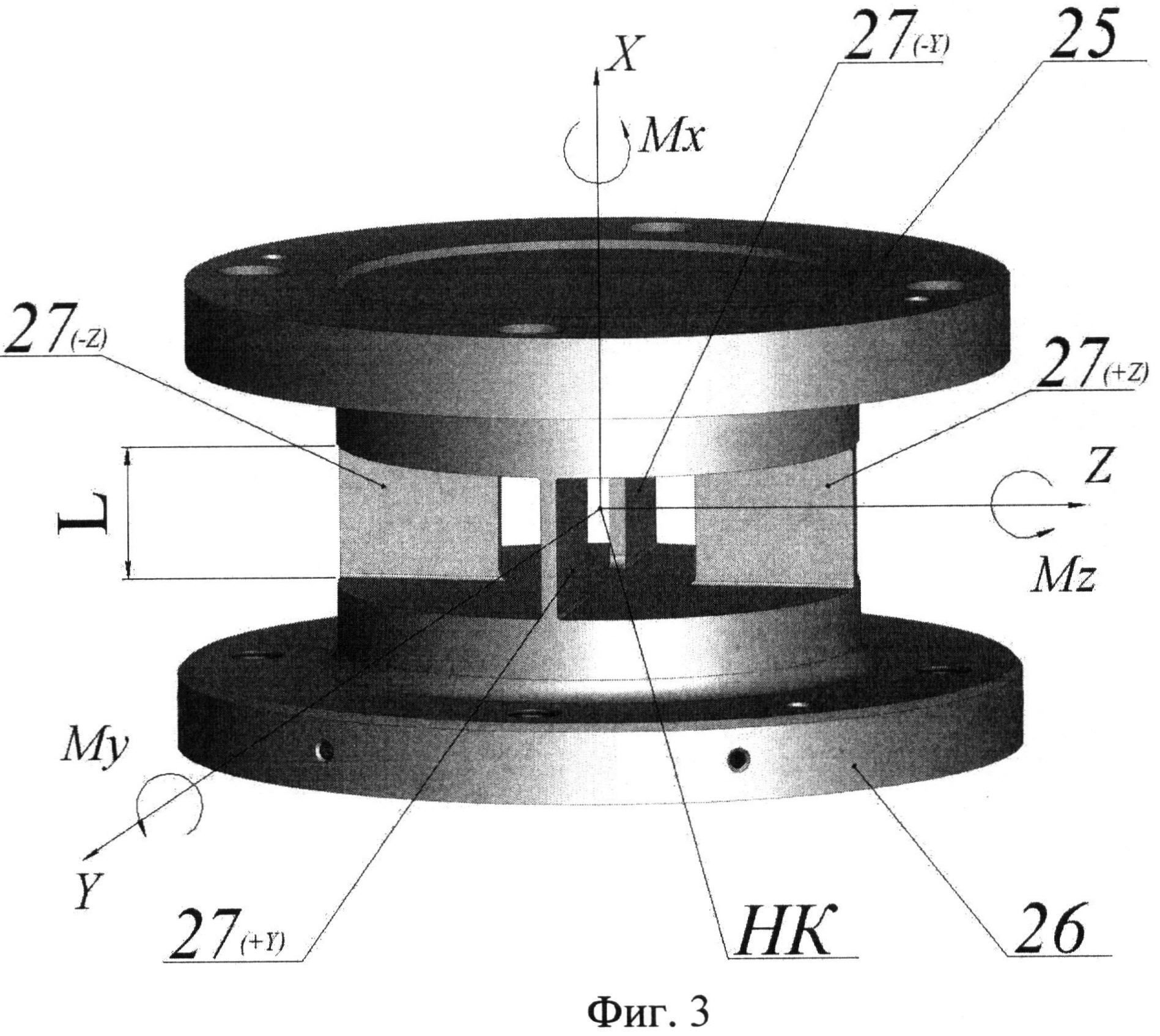
На фиг.3 - аксонометрическая проекция трехкомпонентного динамометрического элемента.
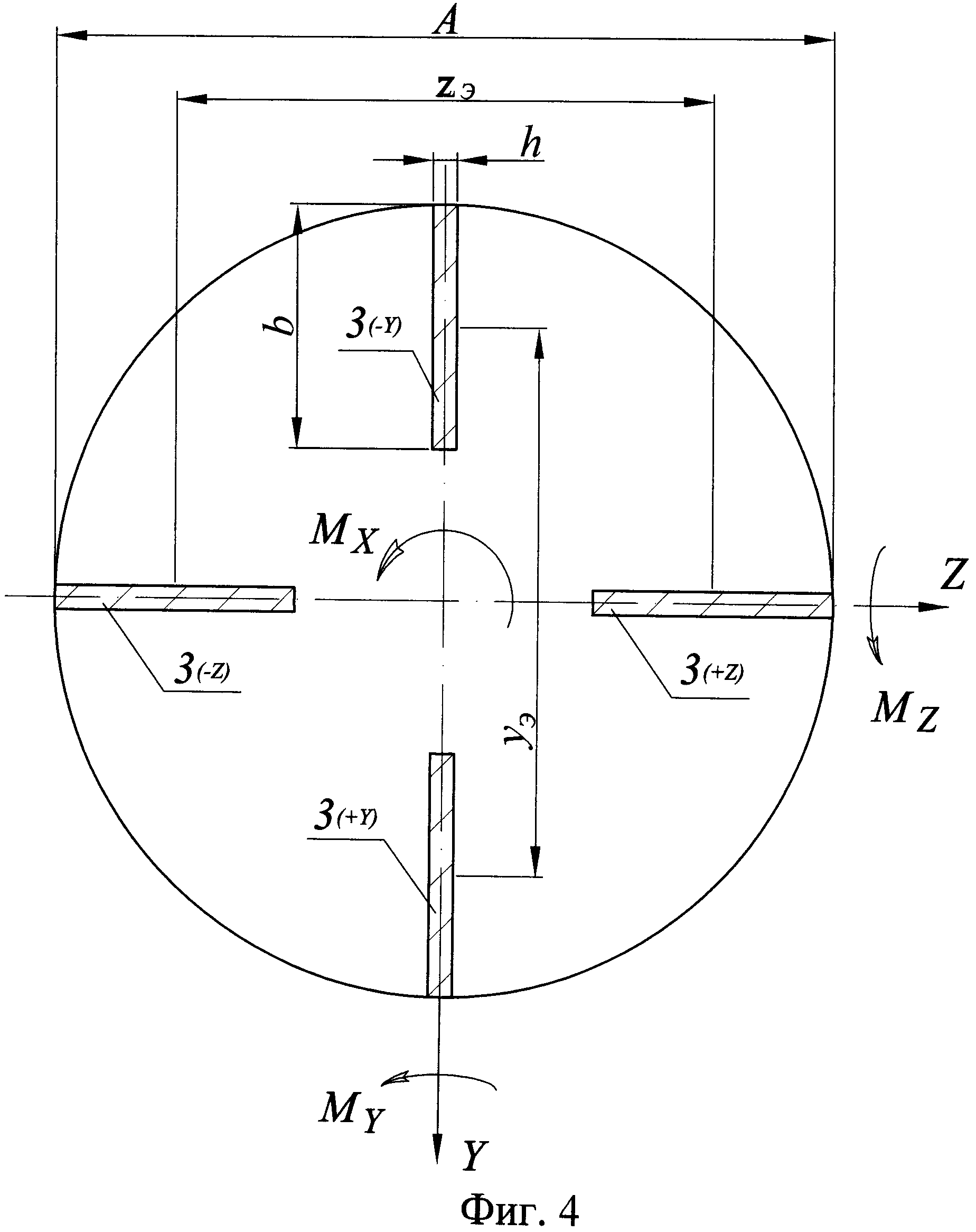
На фиг.4 - расчетная схема трехкомпонентного динамометрического элемента.
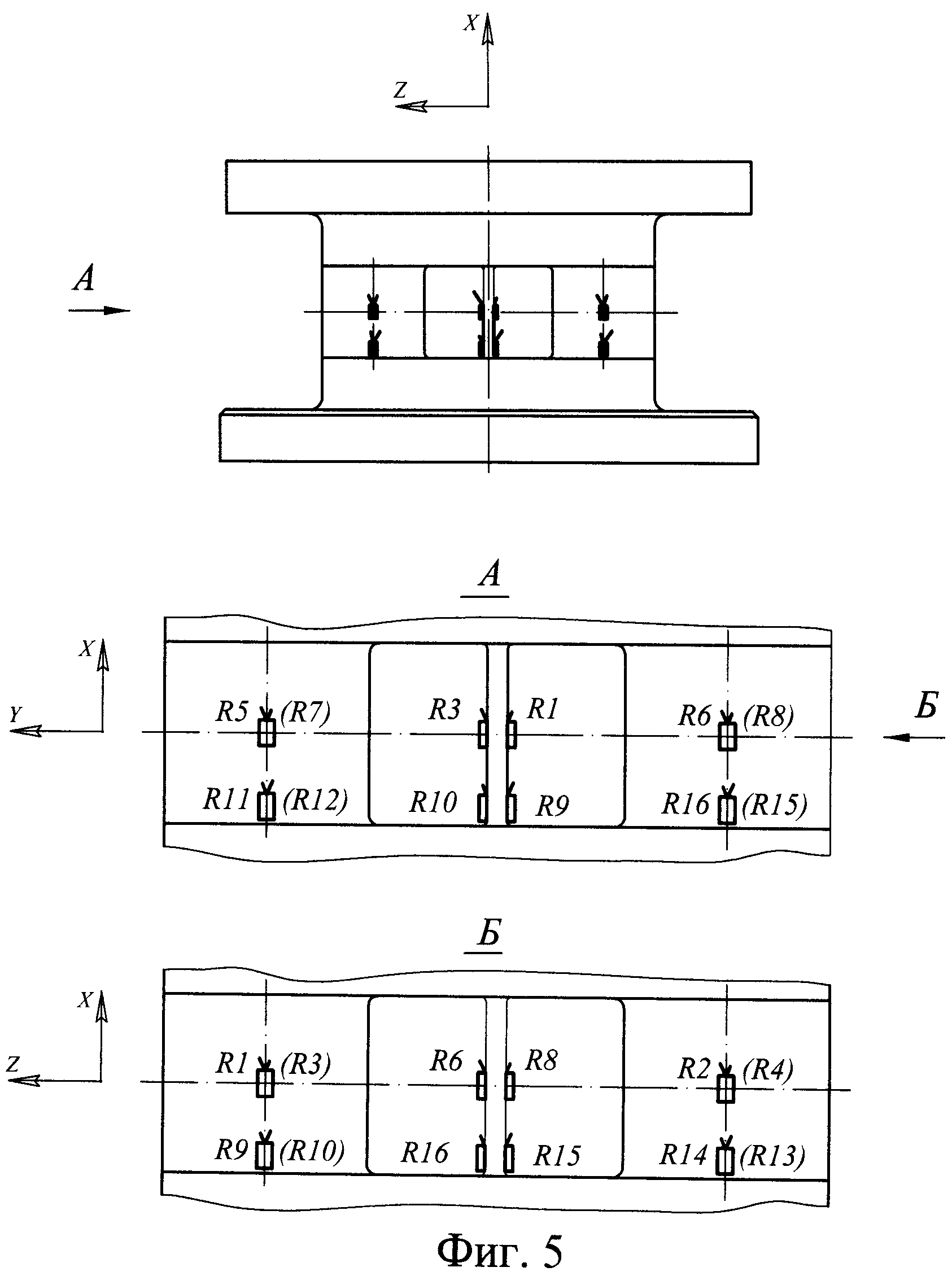
На фиг.5 - схема установки тензодатчиков на пластинах трехкомпонентного динамометрического элемента.
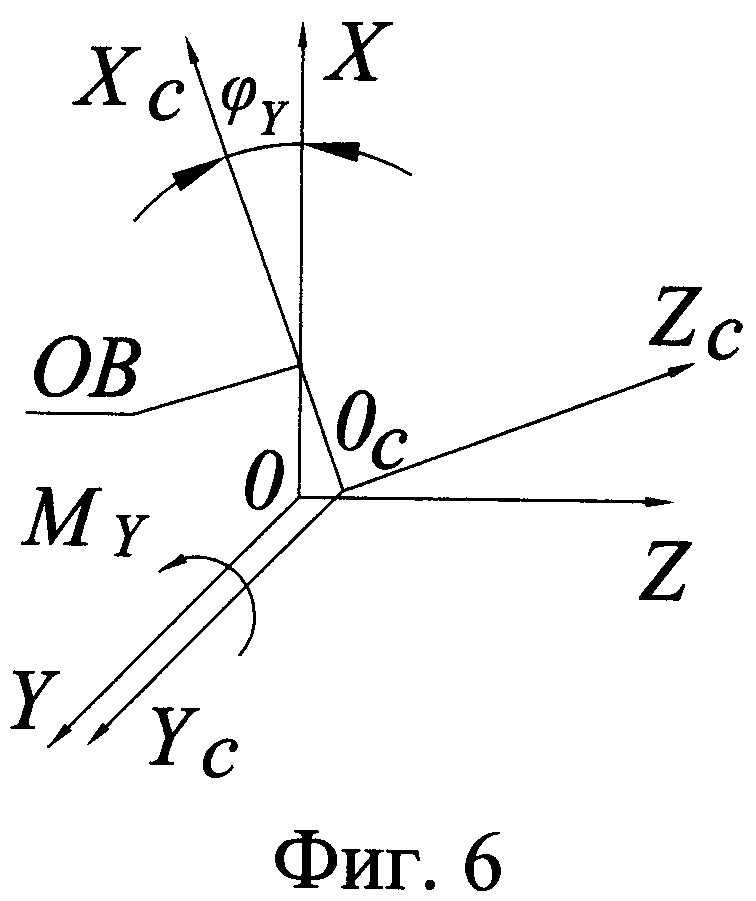
На фиг.6 - система координат стенда при колебании изделия вокруг оси Y.
На фиг.7 - диаграмма векторов при колебании изделия вокруг оси Y.
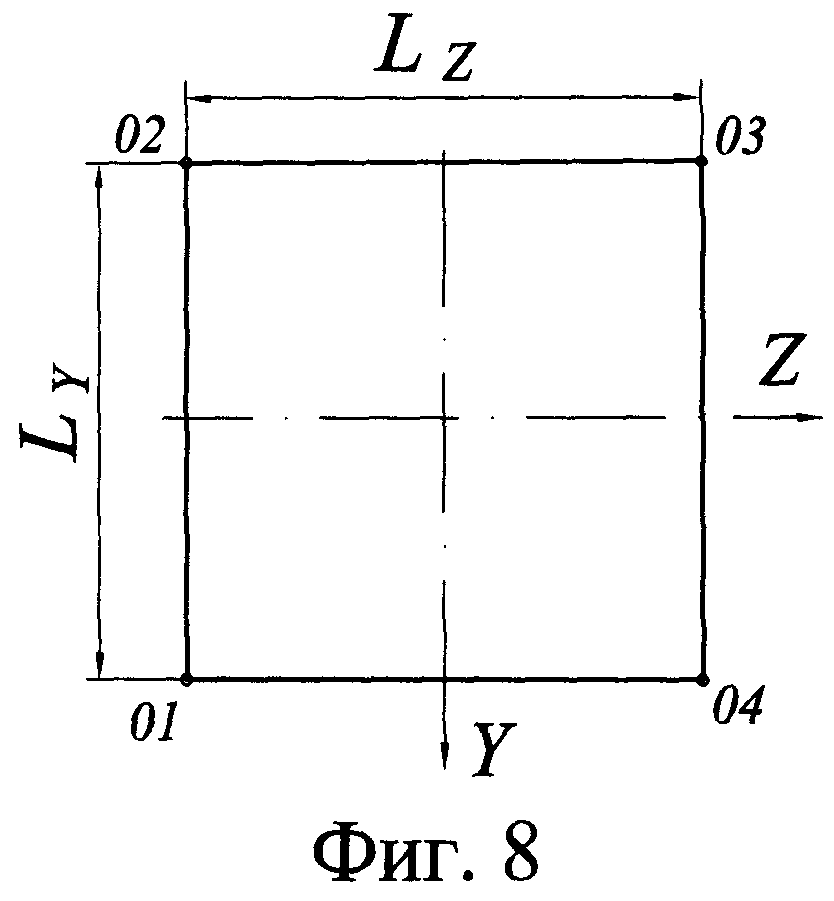
На фиг.8 - схема расположения тензодатчиков.
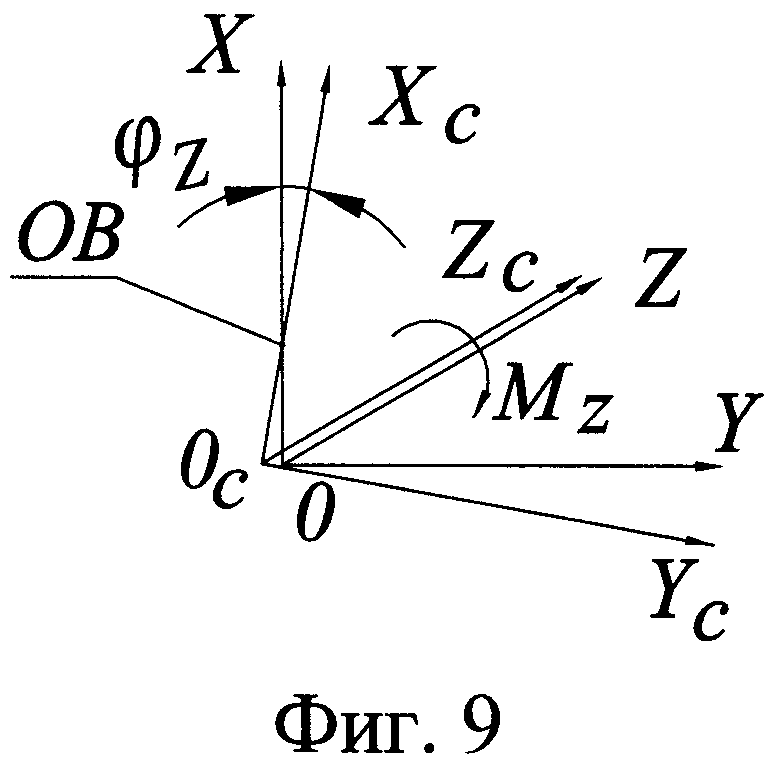
На фиг.9 - система координат стенда при колебании изделия вокруг оси Z.
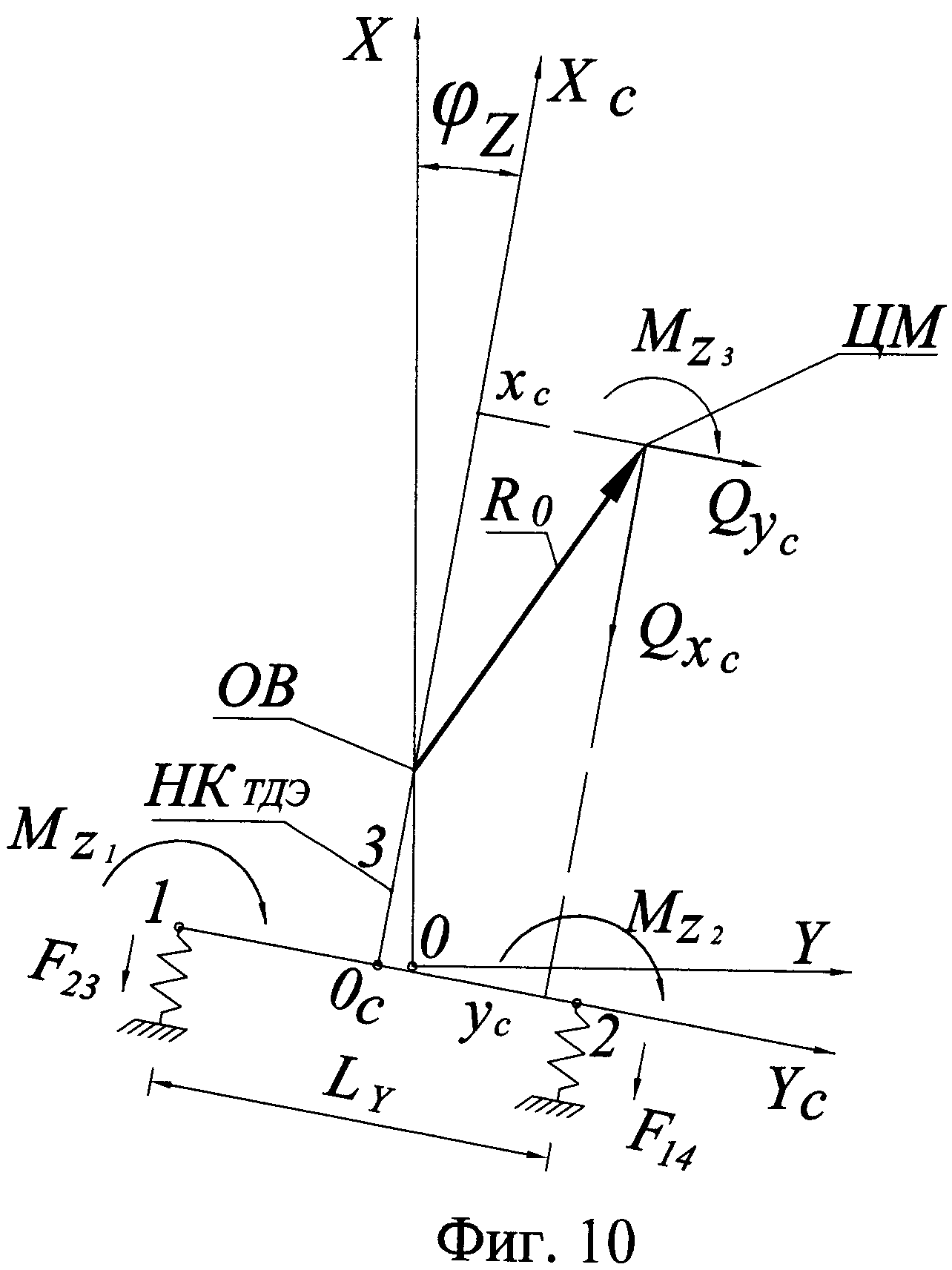
На фиг.10 - диаграмма векторов при колебании изделия вокруг оси Z.
Изделие 1 (фиг.1 и фиг.2) через пластину-кантователь 2 соединено с крестовиной 3, установленной на верхнем основании трехкомпонентного динамометрического элемента 4, который своим нижним основанием закреплен на динамометрической платформе 5, опирающейся на четыре динамометра 6 Динамометры 6 разнесены в пространстве в направлении горизонтальных координатных осей и своими нижними основаниями закреплены в вершинах прямоугольной внутренней рамы 7 устройства задания колебаний. Стороны внутренней рамы 7 параллельны горизонтальным осям Y и Z стенда и трехкомпоиентного динамометрического элемента 4. Устройство задания колебаний состоит из подвижных внутренней 7, внешней 8 и нижней 9 рам. Внутренняя рама 7 соединена с внешней рамой 8 при помощи двух горизонтальных шарниров 10, установленных на стойках 11 и подвесках 12, закрепленных на внешней и внутренней рамах соответственно. Внешняя рама 8 соединена с нижней рамой 9 при помощи двух горизонтальных шарниров 13, установленных на стойках 14 и подвесках 15, закрепленных на нижней раме и внешней раме соответственно. Нижняя рама 9 соединена со станиной 16 при помощи вертикального шарнира 17. Оси шарниров направлены вдоль координатных осей 0XYZ стенда так, что внутренняя рама 7 может совершать маятниковые колебания вокруг оси Z, внешняя рама 8 - вокруг оси Y, а нижняя рама 9 - вокруг оси X.
Внутренняя, внешняя и нижняя рамы соединены между собой и со станиной системой пружин. Внешняя рама 8 соединена с нижней рамой 9 парой пружин 18. Внутренняя рама 7 соединена с внешней рамой 8 парой пружин 19. Нижняя рама 9 соединена со станиной 16 двумя парами пружин 20. На валах трех шарниров установлены датчики угла 21. В результате образованы три независимые колебательные системы, каждая из которых способна совершать колебания вокруг одной из трех ортогональных осей стенда. Для предотвращения произвольных угловых перемещений изделия стенд снабжен фиксаторами 22, 23 и 24, обеспечивающими колебания изделия только вокруг той оси, относительно которой в настоящий момент выполняется измерение момента инерции. Каждая пара рам снабжена своим устройством задания колебаний.
Основной особенностью данного стенда является наличие в нем трехкомпонентного динамометрического элемента (ТДЭ) 4 (фиг.1 и фиг.2), состоящего из двух оснований - верхнего 25 (фиг.3), нижнего 26 и четырех пластин 27(27(+Y), 27(-Y), 27(+Z) и 27(-Z)), расположенных вдоль координатных осей Y и Z. Начало координат (НК), относительно которого измеряются моменты MX, MY и MZ, расположено на пересечении осей симметрии ТДЭ и находится по оси Х выше, чем начало координат динамометрической платформы 5.
Измеряемые моменты MY и MZ действуют на пластины 27, вызывая в них деформации растяжения и сжатия. Под действием положительного момента MY пластина 27(-Z) испытывает деформацию сжатия, пластина 27(+Z) - растяжения. Положительный момент MZ растягивает пластину 27(-Y) и сжимает пластину 27(+Y).
Измеряемый суммарный момент в результате максимально возможного приближения центра масс изделия к началу координат ТДЭ включает в себя минимальную составляющую позиционного момента, что значительно повышает точность измерения центральных моментов инерции.
В качестве примера приведен расчет чувствительности пластин при действии на ТДЭ расчетного значения момента MY=410 кгс·м и размерах пластин ТДЭ (фиг.3 и фиг.4):
А=130 мм; b=40 мм; h=4 мм; yЭ=zЭ=90 мм; L=35 мм;
тогда: 
В результате получим напряжения: растяжения на оси симметрии пластины 27(+Z) и сжатия на оси симметрии пластины 27(-Z), равные:
 .
.
Относительная деформация пластины под тензорезисторами:
 ;
;
где: для стали модуль Юнга:  .
.
Тензорезисторы R1…R4 (фиг.5) для измерения  установлены по оси симметрии на гранях пластин 27(+Z) и 27(-Z) на уровне плоскости OYZ.
установлены по оси симметрии на гранях пластин 27(+Z) и 27(-Z) на уровне плоскости OYZ.
Сигнальное напряжение на выходе четырехплечевого моста из тензорезисторов: ΔU=Un·k·ε=16·10-3 В;
где: напряжение питания моста Un=6 В;
коэффициент преобразования тензорезистора  ;
;
относительное приращение сопротивления тензорезистора  .
.
Обычно разрешающая способность электронной тензометрической аппаратуры составляет: δΔU=1·10-6 В.
В результате количество делений шкалы прибора:

Это хороший и вполне приемлемый результат.
Аналогичный результат получается от действия момента MZ=410.
Для измерения  установлены тензорезисторы R5…R8 (фиг.5).
установлены тензорезисторы R5…R8 (фиг.5).
Момент MX поворачивает на некоторый угол верхнее основание 25 (фиг.3) ТДЭ относительно нижнего 26. В результате пластины 27 испытывают в основном S-образную деформацию изгиба.
Расчетное значение момента MX=30 кгс·м.
Пара сил, действующая в корневых сечениях каждой пластины:

Изгибающий момент в корневых сечениях пластин:

Момент сопротивления пластины:

Напряжения в корневых сечениях пластин:

Полученная величина напряжения в пластинах того же порядка, что и от моментов MY и MZ.
Для измерения  установлены тензорезисторы R9…R16 (фиг.5)
установлены тензорезисторы R9…R16 (фиг.5)
Необходимо отметить, что, несмотря на сравнительно большое отношение расчетных значений моментов  , трехкомпонентный динамометрический элемент является практически реализуемой конструкцией.
, трехкомпонентный динамометрический элемент является практически реализуемой конструкцией.
Стенд работает следующим образом.
Подобно прототипу в нем предусмотрены два режима работы - динамический и статический.
В динамическом режиме измеряются центральные моменты инерции, а в статическом - вес (масса) и координаты центра масс (ЦМ) изделия.
Метод измерения моментов инерции и координат центра масс можно, в отличие от прототипа, коротко охарактеризовать как «Метод трех моментов».
При колебаниях изделия вокруг одной из горизонтальных осей измеряются моменты относительно трех точек, разнесенных в пространстве.
Рассмотрим более подробно оба режима измерений.
При измерении центрального момента инерции относительно оси Y фиксатор 22 (фиг.1 и фиг.2) разомкнут и допускает колебания изделия вокруг оси Y, а фиксаторы 23 и 24 замкнуты и предотвращают угловые перемещения изделия вокруг осей Х и Z.
Внешняя рама 8 с установленными на ней внутренней рамой 7, динамометрической платформой 5 и изделием 1 отклоняется на угол φY вокруг оси параллельной оси Y стенда и под действием пружин 18 начинает совершать угловые затухающие колебания.
На фиг.7 приведена векторная диаграмма сил и моментов, при колебании изделия вокруг оси Y, где отмечены три точки с номерами 1, 2 и 3, относительно которых измеряются моменты M1, М2, и, М3, возникающие при свободных колебаниях изделия вокруг оси вращения (OB) параллельной оси Y стенда.
Неподвижные оси OXYZ стенда представляют инерциальную систему, а оси 0cXcYcZc - связанную с изделием систему отсчета (фиг.6).
Изделие характеризуется массой m, тремя координатами xc, yc, zc центра масс (ЦМ на фиг.7 и фиг.10) и тремя центральными моментами инерции IX0, IY0, IZ0. Точки 1, 2 принадлежат динамометрической платформе ДП 5 (фиг.1 и фиг.2), опирающейся на два ряда динамометров 6 - левый ряд: 01, 02 (фиг.8) и правый ряд: 03, 04, разнесенных вдоль оси Z на расстояние Lz.
Точка 3 (фиг.7), лежащая на оси Хс с координатой xн, является началом координат (ПК) (фиг.3) трехкомпонентного динамометрического элемента.
Радиус-вектор R0 (фиг.7) соединяет точку оси вращения (OB) с ЦМ изделия. В ЦМ действуют вектор инерционной силы Fc и вес изделия Р.
Вектор инерционной силы:
Fc=m·w
где: w - вектор ускорения:

ν - скорость ЦМ изделия,
τ, n - единичные взаимно перпендикулярные векторы. Откуда составляющие вектора Fc по осям Х и Z:

 .
.
Составляющие силы веса:
 ;
;  .
.
В каждый момент времени мгновенные значения составляющих инерционной силы и силы веса суммируются, в результате чего имеем новый вектор обобщенной силы Q с двумя составляющими:
 ;
; 
составляющие моментов вдоль оси Yc относительно точек 1, 2, 3 по оси Yc:

где: MYc - искомая составляющая момента по оси Y.
Решая систему (2), находим неизвестную составляющую MYc.
Условием существования решения является отличие от нуля определителя Δ системы: Δ≠0.
В нашем случае:
Δ=-xн·Lz
откуда следует, что система имеет решение, если точки 1, 2, 3 (фиг.7) не лежат на одной прямой, что имеет место в нашем случае xн≠0; Lz≠0.
В результате решения системы (2) получим выражение для искомой составляющей полезного момента:

В действительности, вместо моментов  и
и  , входящих в (3), измеряются силы реакции F12 и F34, которые связаны с моментами зависимостями:
, входящих в (3), измеряются силы реакции F12 и F34, которые связаны с моментами зависимостями:
 ;
;  .
.
где: F12=F01+F02 и F34=F03+F04.
Тогда:

Зная составляющую момента MYc и составляющую углового ускорения по оси  находим измеряемый центральный момент инерции IY относительно оси Y:
находим измеряемый центральный момент инерции IY относительно оси Y:

Выражения (4) и (5) являются уравнениями измерения центрального момента инерции изделия относительно оси Y.
При измерении центрального момента инерции относительно оси Z фиксатор 23 (фиг.1 и фиг.2) разомкнут, а фиксаторы 22 и 24 замкнуты и предотвращают угловые перемещения изделия вокруг осей Х и Y.
Внутренняя рама 7 с установленными на ней динамометрической платформой 5 и изделием 1 отклоняются на угол φZ вокруг оси параллельной оси Z стенда и под действием пружин 19 начинают совершать угловые затухающие колебания вокруг оси вращения параллельной оси Z стенда.
На фиг.10 приведена векторная диаграмма колебаний изделия вокруг оси вращения (OB), параллельной оси Z стенда.
По аналогии с (2) составляющие моментов относительно оси Z:

В данном случае точкам 1 и 2 соответствуют два ряда динамометров 02, 03 и 01, 04 (фиг.8), измеряющих силы F23 и F14; LY - расстояние между рядами динамометров;  и
и  - составляющие вектора обобщенной силы Q;
- составляющие вектора обобщенной силы Q;  - искомая составляющая полезного момента по оси Zc.
- искомая составляющая полезного момента по оси Zc.
Решая систему (6) и учитывая, что:
 ;
;  получим:
получим:

где F14=F01+F04 и F23=F02+F03;
откуда: 
где  - измеряемый центральный момент инерции относительно оси Y,
- измеряемый центральный момент инерции относительно оси Y,
 - составляющая вектора углового ускорения по оси Z.
- составляющая вектора углового ускорения по оси Z.
Выражения (7) и (8) являются уравнениями измерения центрального момента инерции изделия относительно оси Z.
При измерении центрального момента инерции относительно оси Х фиксатор 24 (фиг.1 и фиг.2) разомкнут, а фиксаторы 22 и 23 замкнуты и предотвращают угловые перемещения изделия вокруг осей Y и Z.
Нижняя рама 9 с установленными на ней внешней рамой 8, внутренней рамой 7, динамометрической платформой 5 и изделием 1 поворачиваются на угол φX вокруг оси Х стенда и под действием пружин 20 начинают совершать угловые затухающие колебания вокруг оси Х стенда.
При колебаниях изделия вокруг оси Х стенда момент  , действующий на трехкомпонентный динамометрический элемент:
, действующий на трехкомпонентный динамометрический элемент:

где  - центральный момент инерции изделия относительно оси Хс;
- центральный момент инерции изделия относительно оси Хс;
 - составляющая вектора углового ускорения по оси X, отсюда:
- составляющая вектора углового ускорения по оси X, отсюда:

Выражение (10) является уравнением измерения  .
.
Измерение массы и координат центра масс производится в статическом режиме работы стенда.
Масса изделия 1 (фиг.1 и фиг.2) измеряется при помощи динамометрической платформы 5, установленной на четырех динамометрах 6:
Вес изделия:

где Fi - сила, измеряемая i-м динамометром.
Для измерения координат центра масс изделия производятся наклоны изделия вокруг оси Y на ряд углов  с одновременным измерением сил реакций F12; F34 (фиг.7) и момента
с одновременным измерением сил реакций F12; F34 (фиг.7) и момента  . При этом динамический момент
. При этом динамический момент  в (4) принимает нулевые значения
в (4) принимает нулевые значения  , а силы реакции становятся постоянными величинами.
, а силы реакции становятся постоянными величинами.
В уравнение (4) входят две неизвестные координаты; xc и zc.
Для их определения достаточно произвести измерения сил реакций и моментов при двух углах наклона φ1 и φ2. С учетом сказанного запишем уравнения (4) в следующем виде:

где: A1 и A2 коэффициенты, входящие в (4):

Решая систему (12) относительно коэффициентов А1 и А2, получим:

где: 
Заменяя в (14) A1 и А2 их значениями из (13), получим:

Как следует из (16), для определения координат xc и zc необходимо знать два параметра стенда: расстояние между рядами динамометров Lz (фиг.7 и фиг.8) и расстояние между началом координат динамометрической платформы и началом координат трехкомпонентного динамометрического элемента xн (фиг.7).
Обычно для измерения коэффициентов В1 и B2 используется количество углов наклона n>2. Тогда система уравнений (12) в силу избыточности решается методом наименьших квадратов.
Для измерения координаты ус воспользуемся моментами  и
и  . возникающими от составляющих веса Px и Pz на плече yc.
. возникающими от составляющих веса Px и Pz на плече yc.
Вектор момента относительно точки 3 (фиг.7):

где PX=PcosφY; PZ=PsinφY
Непосредственно из (17) находим:

Составляющая веса PY, обусловленная начальным наклоном изделия относительно оси Z сохраняет постоянное значение при изменении угла наклона φY.
С учетом сказанного выражения (18) примут следующий вид:

где  ,
,  - начальные значения моментов.
- начальные значения моментов.
м,. В координатах xc=sinφY,  момент Mx представляет прямую линию, угол наклона которой (координата yc) определяется методом наименьших квадратов для ряда последовательных углов наклона изделия.
момент Mx представляет прямую линию, угол наклона которой (координата yc) определяется методом наименьших квадратов для ряда последовательных углов наклона изделия.
С другой стороны если вычесть из показаний моменты Mx и Mz их начальные значения - тогда координата ус может быть определена следующим образом:

Полученные зависимости (16), (19) и (20) полностью решают задачу измерения координат ЦМ изделия.
Главной особенностью предложенного метода измерения координат ЦМ является независимость результата от начального угла установки изделия на стенде.
Используя выражения (14), (16), основное уравнение измерения инерциального момента (4) приводится к более рациональному виду:

В полученное уравнение входят два коэффициента В1 и В2 и единственный параметр стенда - расстояние между рядами динамометров Lz.
Важным результатом является тот факт, что в уравнение (21) в отличие от исходного (4) не входят координаты ЦМ изделия.
Изготовлен и установлен в ФГУП «Конструкторское бюро машиностроения» в г. Коломна опытный образец предлагаемого стенда, испытания которого подтвердили ожидаемый технический результат.
Стенд для измерения массы, координат центра масс и моментов инерции изделия, содержащий динамометры, датчики угла, пружины, станину, динамометрическую платформу, устройства задания колебаний, состоящие из подвижных рам, соединенных между собой и со станиной шарнирами и системой пружин, соединенных с рамами, при этом оси шарниров соединены с осями датчиков угла, отличающийся тем, что стенд снабжен фиксаторами, обеспечивающими колебания изделия только вокруг той оси, относительно которой в настоящий момент выполняется измерение момента инерции, и трехкомпонентным динамометрическим элементом, состоящим из четырех пластин, ориентированных вдоль координатных осей стенда, верхнего основания, на которое установлено изделие посредством крестовины, и нижнего основания, закрепленного на динамометрической платформе так, что начало координат трехкомпонентного динамометрического элемента находится по вертикальной оси X выше, чем начало координат динамометрической платформы, которая опирается на динамометры, закрепленные в вершинах прямоугольной внутренней рамы, стороны которой параллельны горизонтальным осям Y и X стенда и трехкомпонентного динамометрического элемента.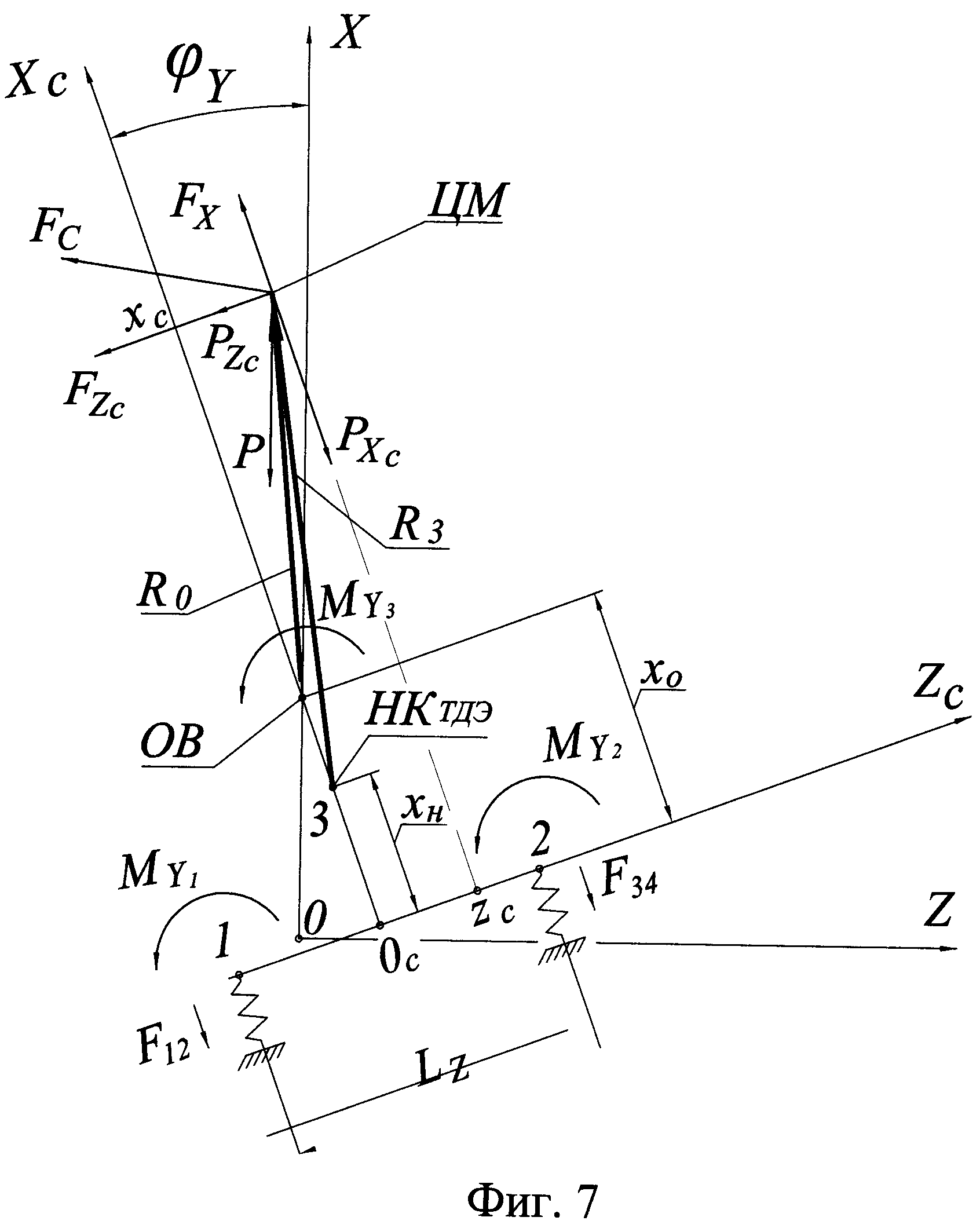
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Измерительное устройство
Способ фрезерования на станках с чпу моделей лопаток роторов газотурбинных двигателей
Система управления самолётом
Способ создания потока газа в гиперзвуковой вакуумной аэродинамической трубе и аэродинамическая труба
Аэродинамический стенд для проведения фундаментальных исследований по генерации электроэнергии мгд-методами с использованием в качестве рабочего газа высокотемпературного водорода (h)
Треугольное крыло для сверхзвуковых летательных аппаратов
Предкрылок крыла самолета и способ его обтекания
Устройство для локального подвода энергии к потоку воздуха, обтекающего объект (варианты)
Способ измерения негерметичности изделий
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Измерительное устройство
Способ фрезерования на станках с чпу моделей лопаток роторов газотурбинных двигателей
Система управления самолётом
Способ создания потока газа в гиперзвуковой вакуумной аэродинамической трубе и аэродинамическая труба
Аэродинамический стенд для проведения фундаментальных исследований по генерации электроэнергии мгд-методами с использованием в качестве рабочего газа высокотемпературного водорода (h)
Треугольное крыло для сверхзвуковых летательных аппаратов
Предкрылок крыла самолета и способ его обтекания
Устройство для локального подвода энергии к потоку воздуха, обтекающего объект (варианты)
Способ измерения негерметичности изделий

