Результат интеллектуальной деятельности: МЕХАНИЗМ КОЛЕННОГО ШАРНИРА
Вид РИД
Изобретение
Изобретение относится к машиностроению в области медицинской техники, а именно к протезированию нижних конечностей.
Известны протезы бедра, в которых механизм коленного шарнира выполнен в виде верхней опорной площадки и нижнего кронштейна, соединенных одной осью вращения (одноосный коленный шарнир). Для обеспечения устойчивости протеза в положении стоя ось вращения коленного модуля расположена сзади линии приложения нагрузки к верхней опорной площадке по направлению ходьбы.
Недостатком конструкции данных устройств является недостаточная величина уменьшения функциональной длины протеза в фазе переноса. Во время 4)азы переноса, эта геометрия отмечена особенно низким клиренсом и, чтобы исключить спотыкания или зацепление протезом за землю на неровной поверхности, необходимо уменьшить длину протеза (длину голени). Уменьшение длины протеза в фазе переноса приводит к значительным компенсаторным движениям и асимметрии при ходьбе.
Известен механизм коленного шарнира, взятый за прототип, с бесступенчатой фиксацией протеза бедра (патент РФ №2096026, A61F 2/64), состоящий из верхней опорной головки с креплением гильзы бедра, нижнего опорного кронштейна с креплением трубки голени, соединенные кинематическим переходным звеном, осей вращения, механизма подтормаживания в виде тормозного барабана с передним и задним рычагами.
Недостатком прототипа является необходимость дополнительных компенсаторных движений пациента при ходьбе из-за неточной имитации протезом истинной траектории движения коленного шарнира.
Задачей изобретения является улучшение эргономических характеристик протеза, а также обеспечение большей устойчивости при ходьбе.
Технический результат изобретения заключается в том, что механизм коленного шарнира выполнен с дискретно-переменным положением его оси вращения. Устойчивость протеза в положении стоя обеспечивается задним расположением оси вращения относительно линий действия нагрузки при стоянии, динамика основного проноса протеза происходит при вращении коленного модуля относительно оси расположенной впереди направления действующей нагрузки в положении стоя. Функция перемены положения оси вращения приводит к естественному укорочению протеза и свободному проносу протезируемой конечности, что обеспечивает естественный рисунок ходьбы, увеличивает безопасность ходьбы по грязи, гололеду, высокой траве и разного рода неровностям.
Сущность изобретения заключается в том, что в механизме коленного шарнира, содержащего верхнюю опорную головку с креплением гильзы бедра, нижний опорный кронштейн с креплением трубки голени, переходное кинематическое звено, по меньшей мере две оси вращения, а также голенооткидное устройство переходное кинематическое звено выполнено в виде вилки с выступами, соединяющееся с верхней опорной головкой посредством первой оси вращения, при этом верхняя опорная головка опирается на переходное кинематическое звено, а вторая ось вращения установлена в проушины нижнего опорного кронштейна, охватывающих переходное кинематическое звено и соединенное с ними посредством второй оси вращения, на верхней опорной головке закреплены элементы фиксации от поворота относительно второй оси вращения, взаимодействующие с выполненными на проушинах нижнего опорного кронштейна упорами, а выступы переходного кинематического звена взаимодействуют с выступающими площадками на верхней опорной головке, при этом первая ось вращения смещена относительно линий действия нагрузки при вертикальном положении нижнего опорного кронштейна к тыльной стороне коленного шарнира, и голеннооткидное устройство с одной стороны связано с верхней опорной головкой, а с другой оно закреплено на нижнем опорном кронштейне со стороны крепления трубки голени.
Сущность изобретения поясняется фигурами:
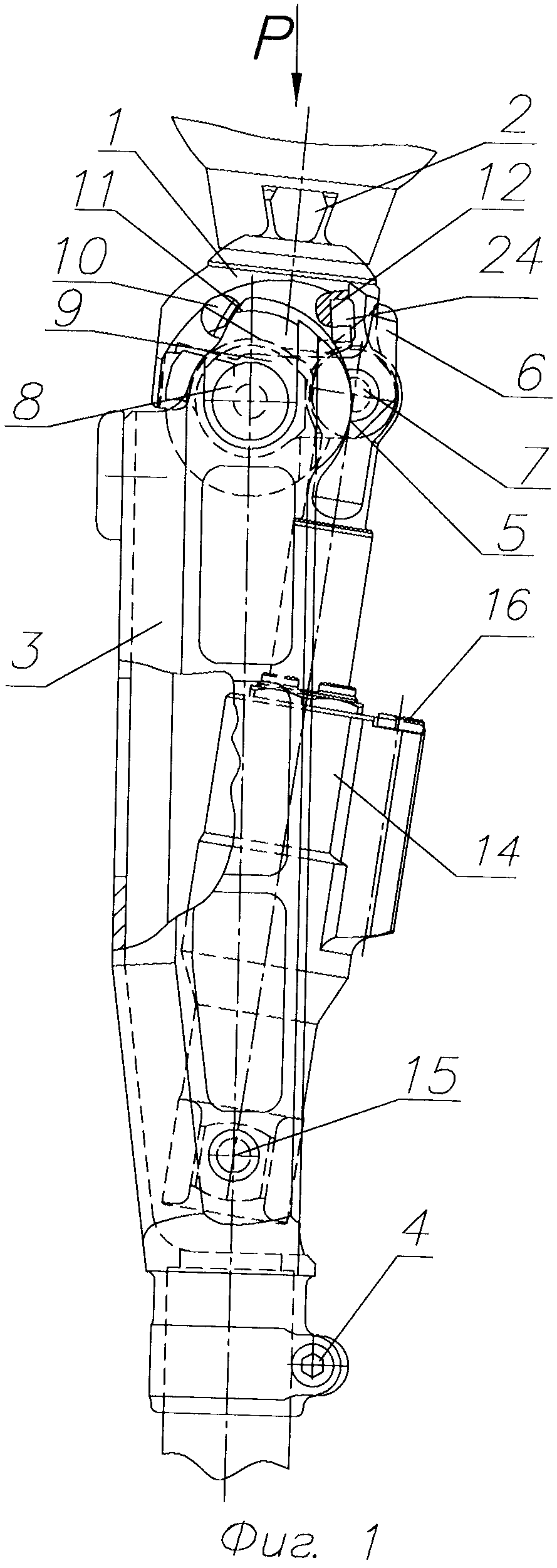
Фиг.1 механизм коленного шарнира изображен в сагиттальной плоскости.
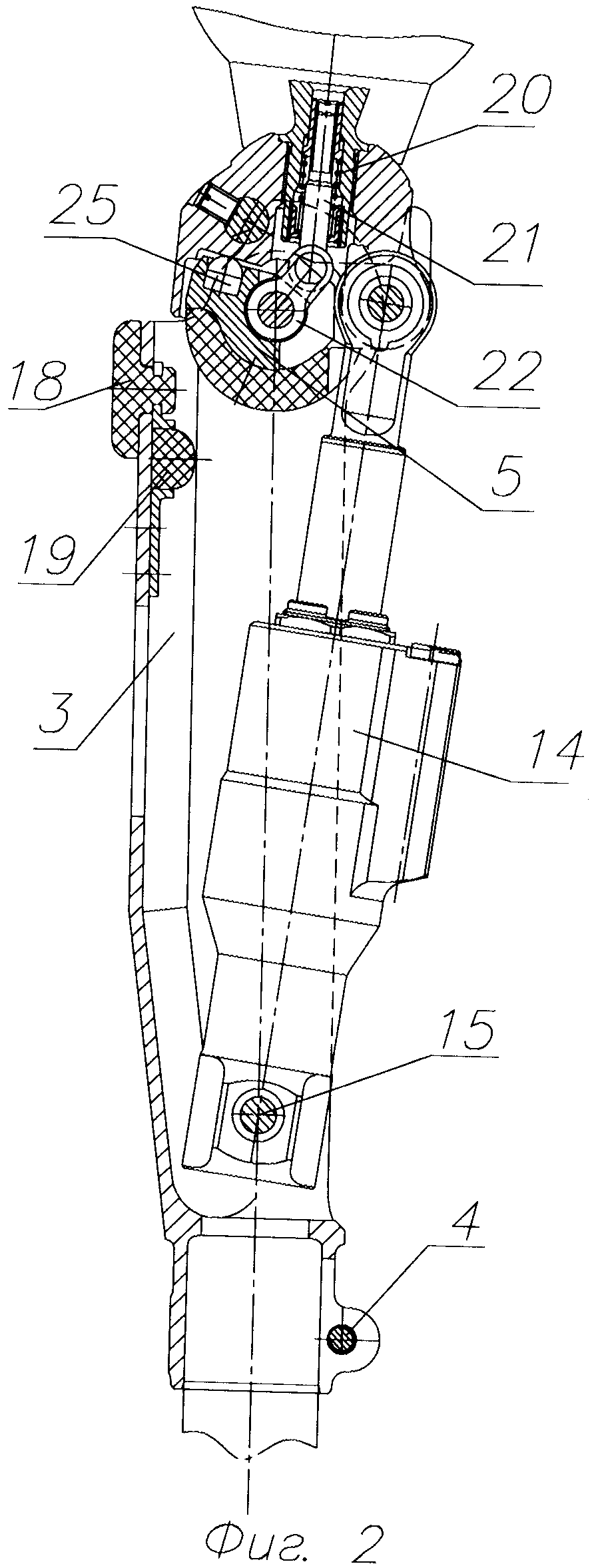
Фиг.2 механизм коленного шарнира изображен в сечении по сагиттальной плоскости.
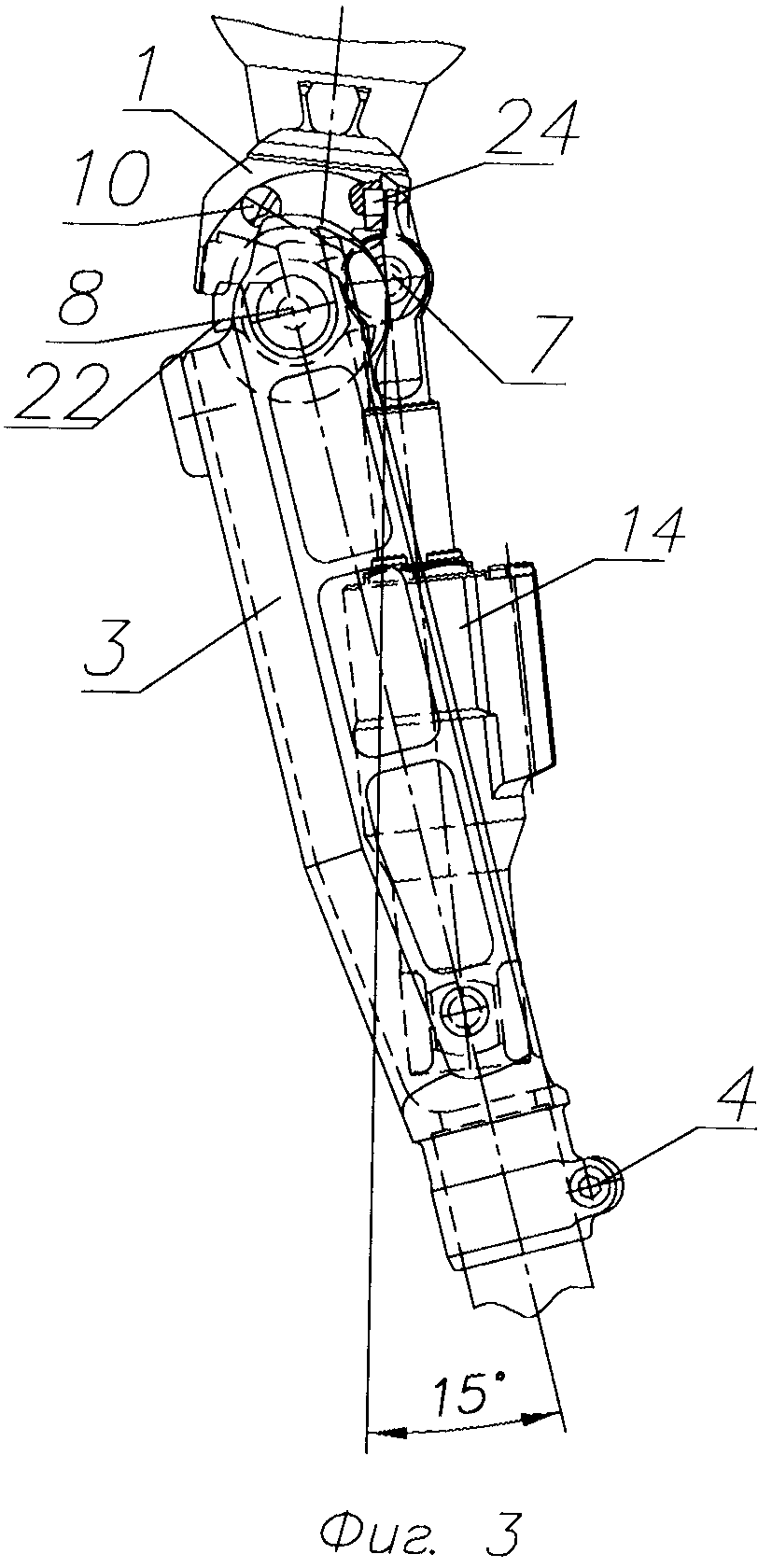
Фиг.3 - механизм изображен в начальной стадии сгибания, угол 15° относительно первой оси вращения 7.
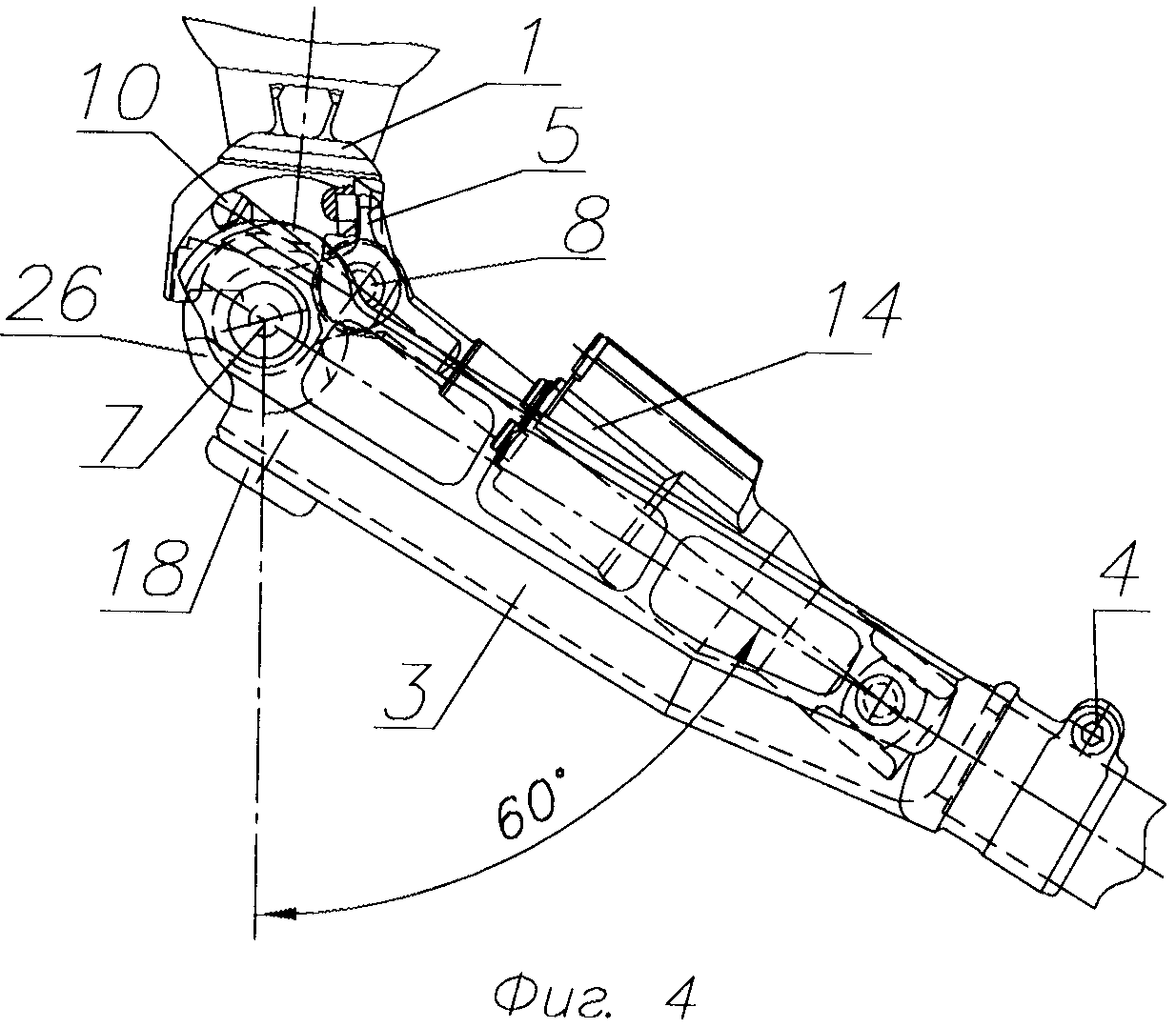
Фиг.4 - механизм изображен в основной фазе переноса протеза, относительно второй оси вращения 8.
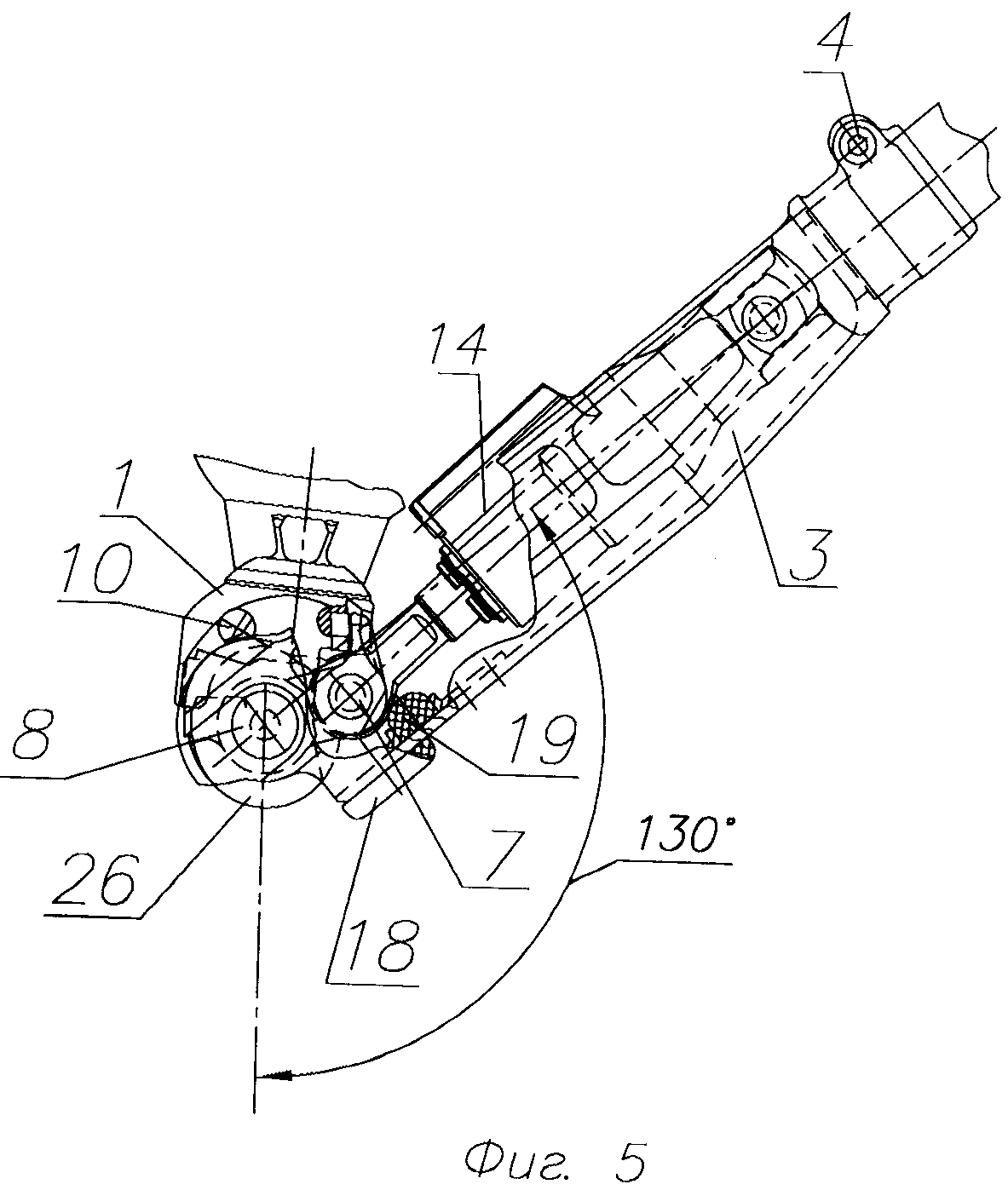
Фиг.5 максимальный угол поворота протеза с данным коленным шарниром.
Фиг.6 вид на механизм шарнира сверху.
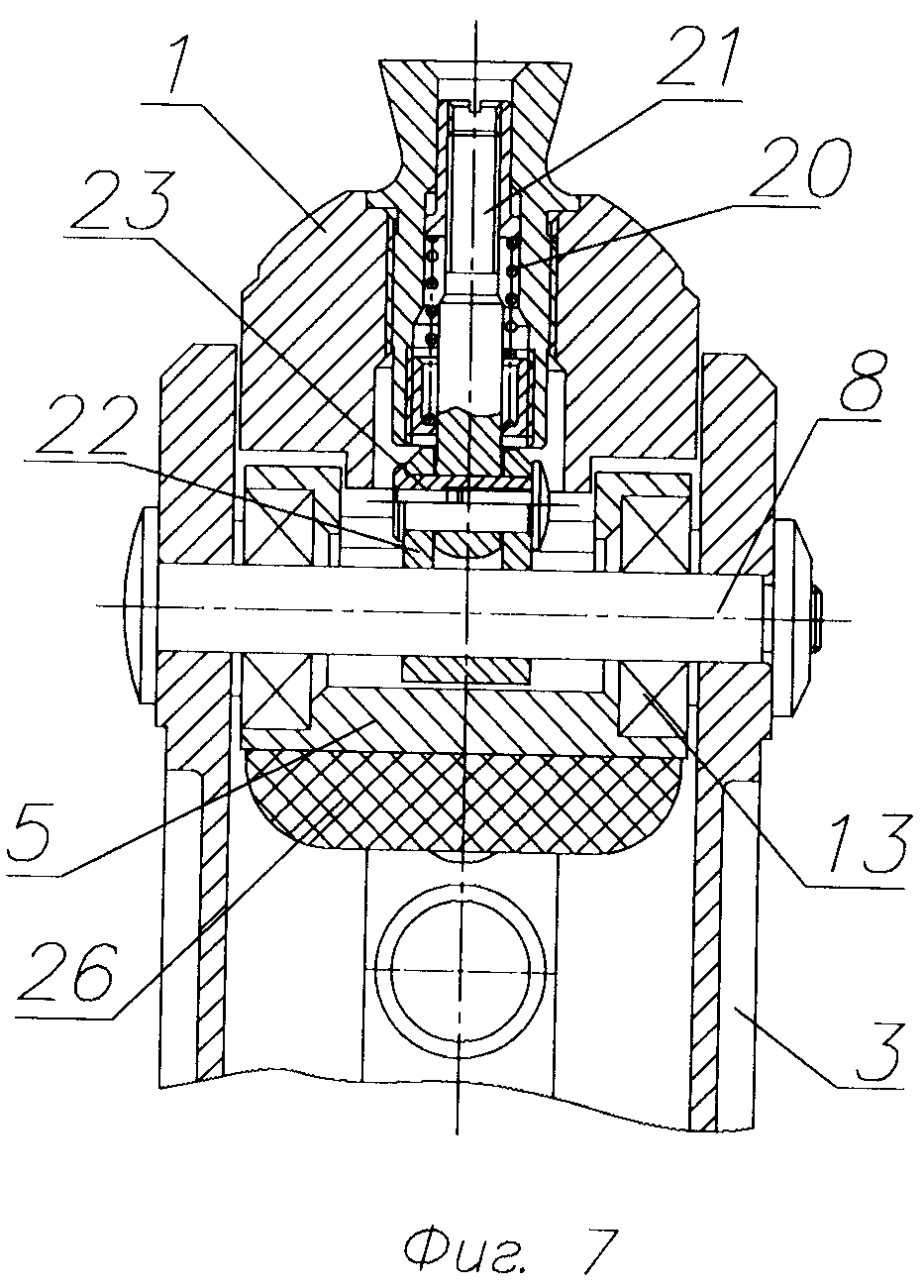
Фиг.7 - сечение механизма шарнира но второй оси вращения 8.
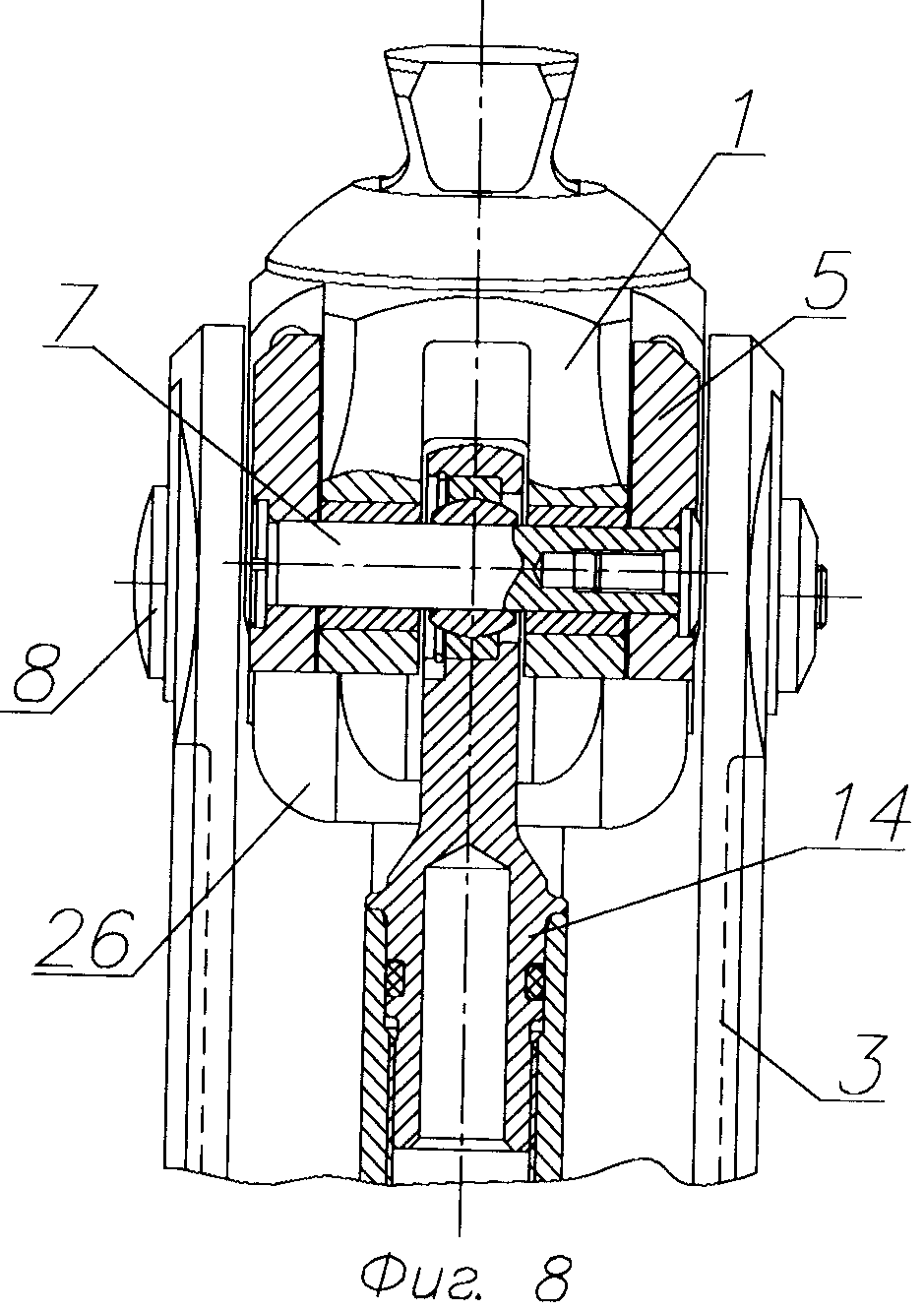
Фиг.8 - сечение механизма шарнира но первой оси вращения 7.
Механизм коленного шарнира состоит из верхней опорной головки 1, соединяемой с гильзой бедра с помощью пирамидки 2 (или других видов адаптеров), нижнего опорного кронштейна 3 соединяемого с трубкой голени при помощи клемного зажима 4. Переходное кинематическое звено 5 выполнено в виде вилки с выступами 6, соединяющейся с верхней опорной головкой 1 посредством первой оси вращения 7, при этом верхняя опорная головка 1 опирается на переходное кинематическое звено 5, а вторая ось вращения 8 установлена в проушины 9 нижнего опорного кронштейна 3, охватывающие переходное кинематическое звено 5 и соединенное с ним посредством второй оси вращения 8. На верхней опорной головке 1 выполнены элементы фиксации от поворота 10, взаимодействующие с выполненными на проушинах 9 нижнего опорного кронштейна упорами 11 относительно второй оси вращения 8, выступы 6 переходного кинематического звена 5 взаимодействует с выступающими площадками 12 на верхней опорной головке 1, при этом первая ось вращения 7, смещена относительно линий действия нагрузки при вертикальном положении нижнего опорного кронштейна 3 к тыльной стороне коленного шарнира.
В начальной стадии сгибания коленного модуля от положения стоя, когда верхняя опорная головка 1 опирается па переходное кинематическое звено 5 (фиг.3), разворот протеза происходит относительно первой оси вращения 7 па угол 15° до упора выступов переходного кинематического звена 5 в верхнюю опорную головку 1. Дальнейший разворот коленного модуля в фазе переноса протеза происходит относительно второй оси вращения 8 (фиг.4), что обеспечивает естественное укорочение протеза и как следствие свободный пронос протезируемой конечности, сохраняя естественный рисунок ходьбы.
Вращение нижнего опорного кронштейна 3 происходит па подшипниках 13 установленных на переходном кинематическом звене 5 (фиг.7). Развороту коленного модуля относительно второй оси вращения 8 препятствуют элементы фиксации от поворота 10 закрепленные на верхней опорной головке 1, взаимодействующие с выполненными на проушинах нижнего опорного кронштейна 3 упорами 11. Элементы фиксации от поворота 10 выходят из зацепления с нижним опорным кронштейном 3 при его совместном повороте с переходным кинематическим звеном 5 и верхней опорной головкой 1 относительно первой оси вращения 7 (фиг.3), после чего происходит дальнейший разворот коленного модуля относительно второй оси вращения 8.
В конструкции коленного модуля установлено голеннооткидное устройство, выполненное, например, в виде силового гидроцилиидра 14 с расположенной внутри откидной пружиной. Силовой гидроцилиндр 14 с одной стороны связан с верхней опорной головкой 1, а с другой он закреплен па нижнем опорном кронштейне 3 со стороны крепления трубки голени на оси 15 (фиг.1). На фиг.8 изображено сечение коленною модуля но первой оси вращения 7, показывающее соединение верхней опорной головки 1, переходного кинематического звена 5 и гидроцилиндра 14. Силовой гидроцилиндр 14 воспринимает основную силовую нагрузку в опорной фазе, а также предназначен для гидравлического управления скоростями сгибания и разгибания коленного модуля в фазе переноса протеза с помощью дросселей сгибания 16 и разгибания 17 предусмотренных в конструкции гидроцилиндра 14. Скорости сгибания и разгибания коленного модуля протеза можно настраивать индивидуально в соответствии с характеристиками пациента, что позволяет обеспечить гармоничный рисунок ходьбы. Максимальный угол поворота протеза с данным коленным шарниром изображен на фиг.5 и равен 130°, что позволяет пациенту посредством амортизатора 18 стоять па коленях, сидеть или одевать одежду. Максимальный угол сгибания модуля ограничивается упорным амортизатором 19.
Поджатие верхней опорной головки 1 к переходному кинематическому звену 5 в положении для хранения модуля осуществляется пружиной 20 посредством штока 21 и звена 22 соединенных осью 23 (фиг.7).
Для исключения ударных нагрузок при работе коленного модуля установлены амортизаторы 19, 24, 25. На переходном кинематическом звене 5 закреплена декоративная крышка 26.
Механизм коленного шарнира, содержащий верхнюю опорную головку с креплением гильзы бедра, нижний опорный кронштейн с креплением трубки голени, переходное кинематическое звено, по меньшей мере, две оси вращения, а также голеннооткидное устройство, отличающийся тем, что переходное кинематическое звено выполнено в виде вилки с выступами, соединяющееся с верхней опорной головкой посредством первой оси вращения, при этом верхняя опорная головка опирается на переходное кинематическое звено, а вторая ось вращения установлена в проушины нижнего опорного кронштейна, охватывающих переходное кинематическое звено и соединенное с ними посредством второй оси вращения, на верхней опорной головке закреплены элементы фиксации от поворота относительно второй оси вращения, взаимодействующие с выполненными на проушинах нижнего опорного кронштейна упорами, а выступы переходного кинематического звена взаимодействуют с выступающими площадками на верхней опорной головке, при этом первая ось вращения смещена относительно линий действия нагрузки при вертикальном положении нижнего опорного кронштейна к тыльной стороне коленного шарнира, и голеннооткидное устройство с одной стороны связано с верхней опорной головкой, а с другой оно закреплено на нижнем опорном кронштейне со стороны крепления трубки голени.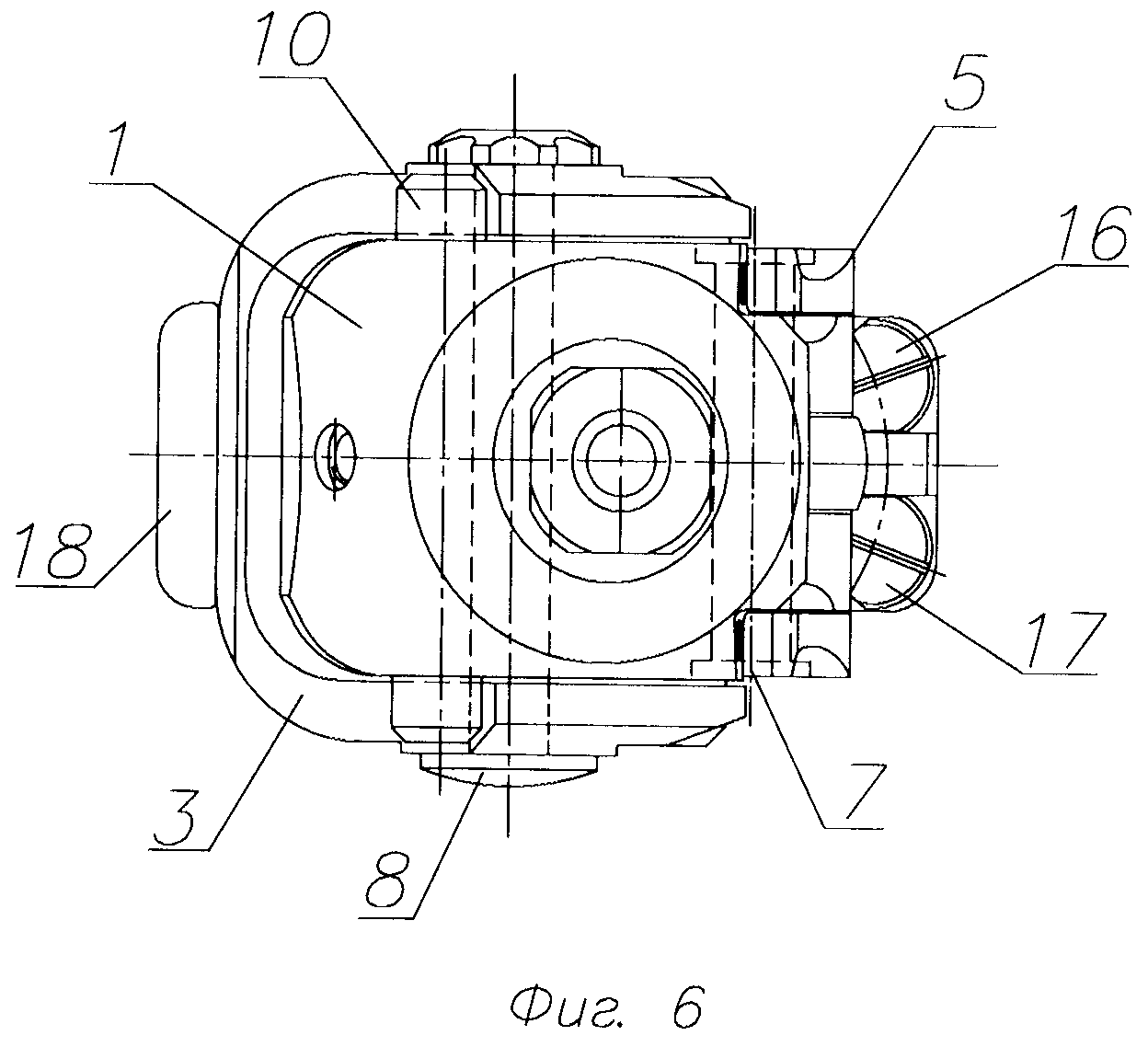
Энергоустановка с электрохимическим генератором на основе водородно-кислородных топливных элементов и способ ее эксплуатации
Способ термостатирования объектов ракеты-носителя и бортовая система для его реализации
Способ управления движением космического аппарата вокруг центра масс при поддержании ориентации
Центробежное рабочее колесо и способ его изготовления
Космическая головная часть
Способ определения магнитной помехи на космическом аппарате в полете
Устройство управления приводом постоянного тока
Способ определения трехосной ориентации космического аппарата
Способ управления кинетическим моментом космического аппарата с помощью реактивных исполнительных органов
Способ поддержания трехосной ориентации космического аппарата с силовыми гироскопами и целевой нагрузкой
Электромеханическая кисть

