Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ
Вид РИД
Изобретение
Настоящее техническое решение относится к области судовождения, а именно к системам автоматического управления движением широкого класса подвижных объектов.
Известна система автоматического управления судном, патент RU 2248914, (B63H 25/04) от 01.03.2004, содержащая датчик и задатчик курса, датчик угловой скорости, датчик кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого соединен с входом рулевого привода кормовых рулей, датчик угла дрейфа и датчик носовых рулей, выход которого подключен к первому входу второго сумматора-усилителя. Кроме того, в состав системы введены датчик и задатчик бокового смещения судна, задатчик допустимого угла дрейфа и блок логики, содержащий алгебраический сумматор, сумматор модулей двух сигналов, диод и электромагнитное реле с двумя нормально-разомкнутыми и нормально-замкнутой контактными группами. Недостатками данного технического решения являются:
1. Нестабильность характеристик. В связи с применением аналоговых узлов, параметры которых существенно зависят от условий эксплуатации (в первую очередь от температуры окружающей среды), будет наблюдаться дрейф параметров системы в целом.
2. Низкая отказоустойчивость. В системе не предусмотрено каких-либо средств нейтрализации отказов отдельных узлов, поэтому выход из строя любого узла приведет к отказу системы в целом.
3. Ограниченные функциональные возможности. Внедрение дополнительных управляющих звеньев или расширение набора датчиков потребует полной переработки аппаратуры системы управления.
4. Фиксированный алгоритм управления. Как в случае расширения, а также реализации другого алгоритма управления требуется полная переработка аппаратуры.
Задачи расширения функциональных возможностей, применения различных алгоритмов управления и повышения стабильности, благодаря наличию цифрового вычислителя, частично решаются в изобретении - аппаратуре автоматического управления движением судна, (патент RU 2221728, (B632H 25/04) от 13.05.2002, содержащей, кроме вычислителя, задатчик путевого угла, датчик угла перекладки руля, рулевой привод, опорную и вспомогательную антенну, приемник ССН, сумматор, два интегратора и дифференциатор. Однако недостаток - низкая отказоустойчивость в данной аппаратуре по-прежнему присутствует, так как любой отказ вычислительного устройства влечет за собой отказ всей системы.
В то же время отказ может носить кратковременный характер, то есть может возникнуть так называемый сбой цифрового вычислителя, приводящий к получению недостоверных результатов вычисления. Сбой такого характера может быть следствием воздействия мощной электромагнитной помехи, вызванной, например, грозовым разрядом или потоком ионизирующего излучения при вспышках на Солнце, а также «искрением» силового электрооборудования судна (подъемники, электродвигатели и т.д.).
Однако после исчезновения внешнего воздействия вычислитель способен правильно работать, необходимо только восстановить полученные до сбоя результаты вычислений. Наиболее полно задача повышения надежности работы системы управления с восстановлением вычислительного процесса после сбоя от внешнего воздействия решена в известной системе управления судном (см. заявку на выдачу патента №2010123776, B63H 25/04 от 10.06.2010, по которой принято решение о выдаче патента на изобретение №2010123776/11(033847) от 06.04.2011). Данное решение можно взять за прототип. Для нейтрализации последствий кратковременных сбоев вычислительного устройства и сохранения работоспособности системы управления в целом в состав системы введено запоминающее устройство с санкционированным доступом (ЗУСД), в которое вычислительное устройство периодически (например, 1 раз в цикле решения задач управления) записывает массив результирующей информации и хранит значение реального времени, используя которые можно восстановить вычислительный процесс и продолжить вычисления.
Известная система содержит датчики угловой скорости, ветра, волнения, систему спутниковой навигации (ССН), блок сбора информации, управляющее вычислительное устройство (УВУ) и запоминающее устройство с санкционированным доступом, и устройства управления исполнительными механизмами (УУИМ) судна.
Однако необходимость программного расчета реального времени, записи результатов расчета параметров управления и реального времени в ЗУСАД с формированием контрольных сумм записываемых массивов приводит к нерациональным затратам времени УВУ. Это ограничивает его функциональные возможности и не позволяет повысить частоту расчета параметров управления, что необходимо при использовании системы для управления высокоманевренными объектами, например, скоростными катерами, некоторыми наземными объектами и особенно объектами авиационной и ракетно-космической техники. С целью расширения возможности применения системы для управления высокоманевренными объектами предлагается
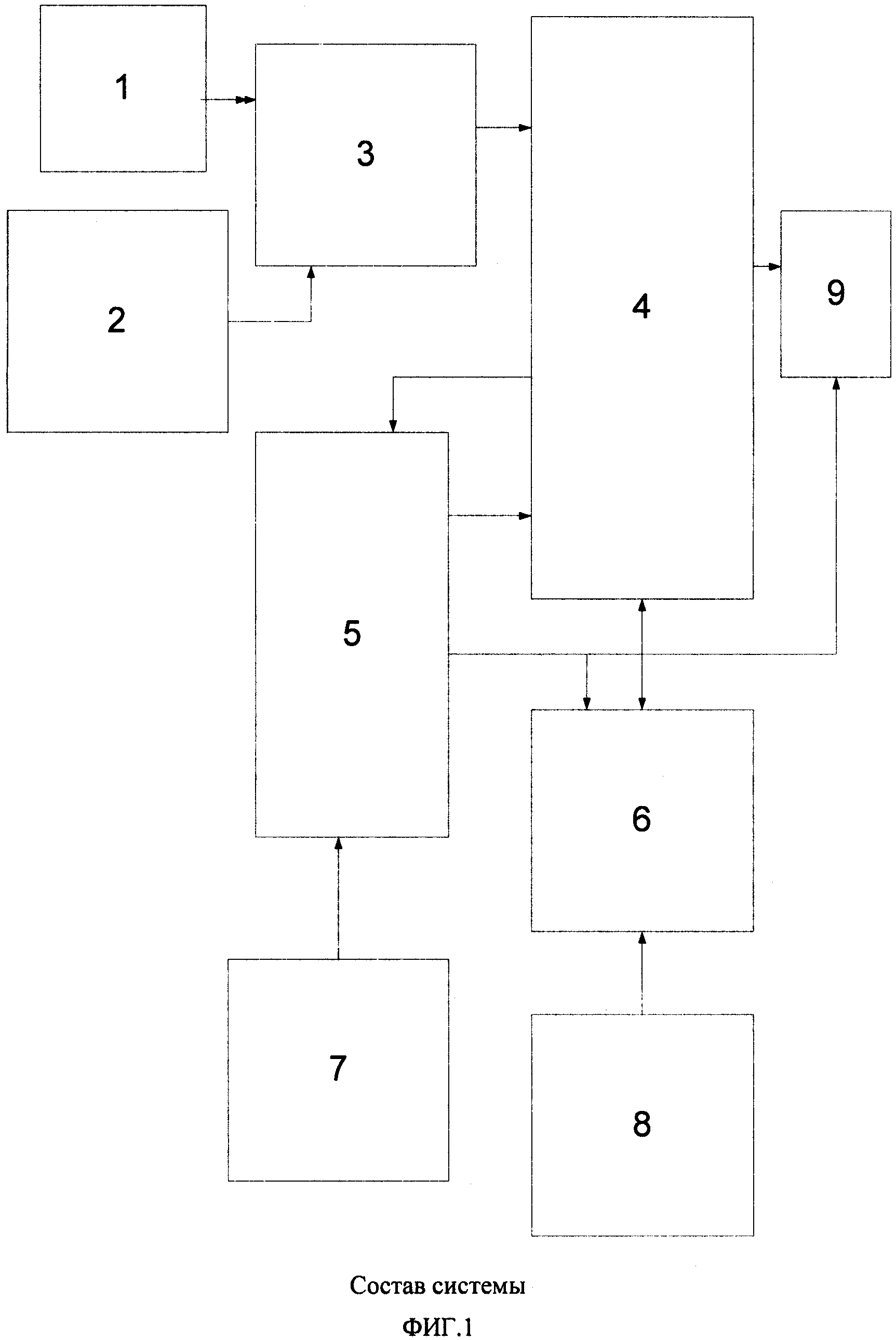
СИСТЕМА УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ, содержащая датчики угловой скорости, ускорения, систему спутниковой навигации, блок сбора информации, управляющее вычислительное устройство (УВУ), устройство управления исполнительными органами объекта и запоминающее устройство с санкционированным доступом. Кроме того, в состав системы введены, датчик реального времени, датчик внешнего воздействия (ДВВ) и формирователь сигналов (ФС) блокировки ЗУСД и пуска УВУ и перестаиваемый формирователь сенхроимпульсов (ФСИ) Состав системы приведен на фигуре 1, где цифрой 1 обозначены датчики, цифрой 2 - система спутниковой навигации, цифрой 3 - блок сбора информации, цифрой 4 - УВУ, цифрой 5 - ФС, цифрой 6 - зЗУСД, цифрой 7 - дДВВ, цифрой 8 - датчик реального времени с ФСИ (датчик меток времени) и цифрой 9 - исполнительные устройства управления механизмами. Датчики и система спутниковой навигации подключены к блоку сбора информации, подключенного к входу УВУ, выход которого подключен к УУИМ. Датчик внешнего воздействия подключен к формирователю сигналов, первый выход которого подключен к входу обнуления/пуска УВУ, а второй выход подключен к ЗУСД, подключенного через двунаправленные связи к УВУ. Третий выход формирователя сигналов подключен к блокирующему входу УУИМ и, а его управляющий вход подключен к управляющему выходу УВУ.
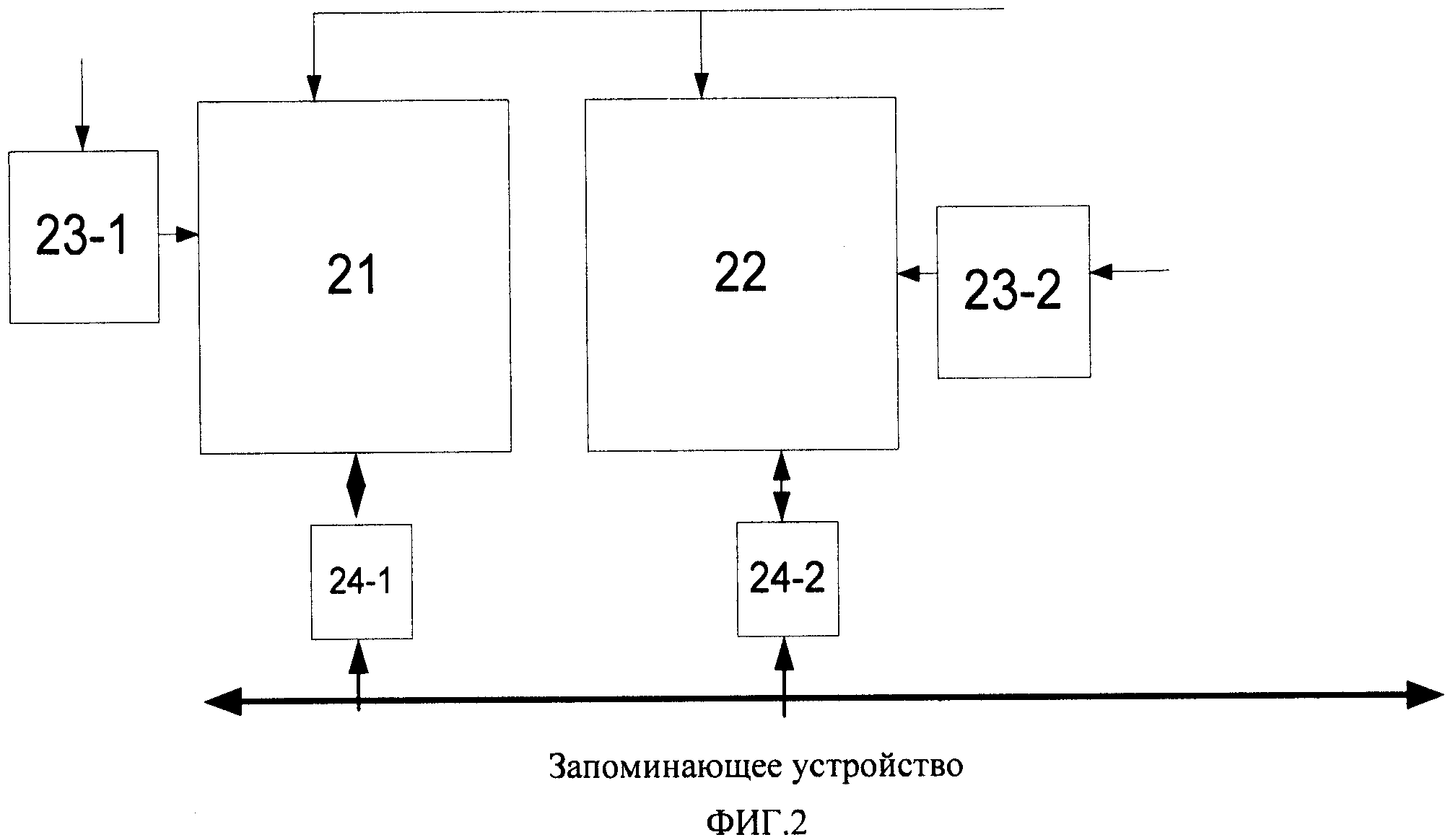
На фигуре 2 приведен состав запоминающего устройства ЗУСД, которое содержит два накопителя информации 21 и 22, на вход каждого из которых подключены собственные сумматоры меток времени 23-1 и 23-2, а также через двунаправленные связи сумматоры массивов. Входы сумматоров меток времени являются входом запоминающего устройства, а сумматоры массивов подключены к шине связи запоминающего устройства с УВУ.
Блокирующий вход накопителей является входом запоминающего устройства, подключенного к ФСБ.
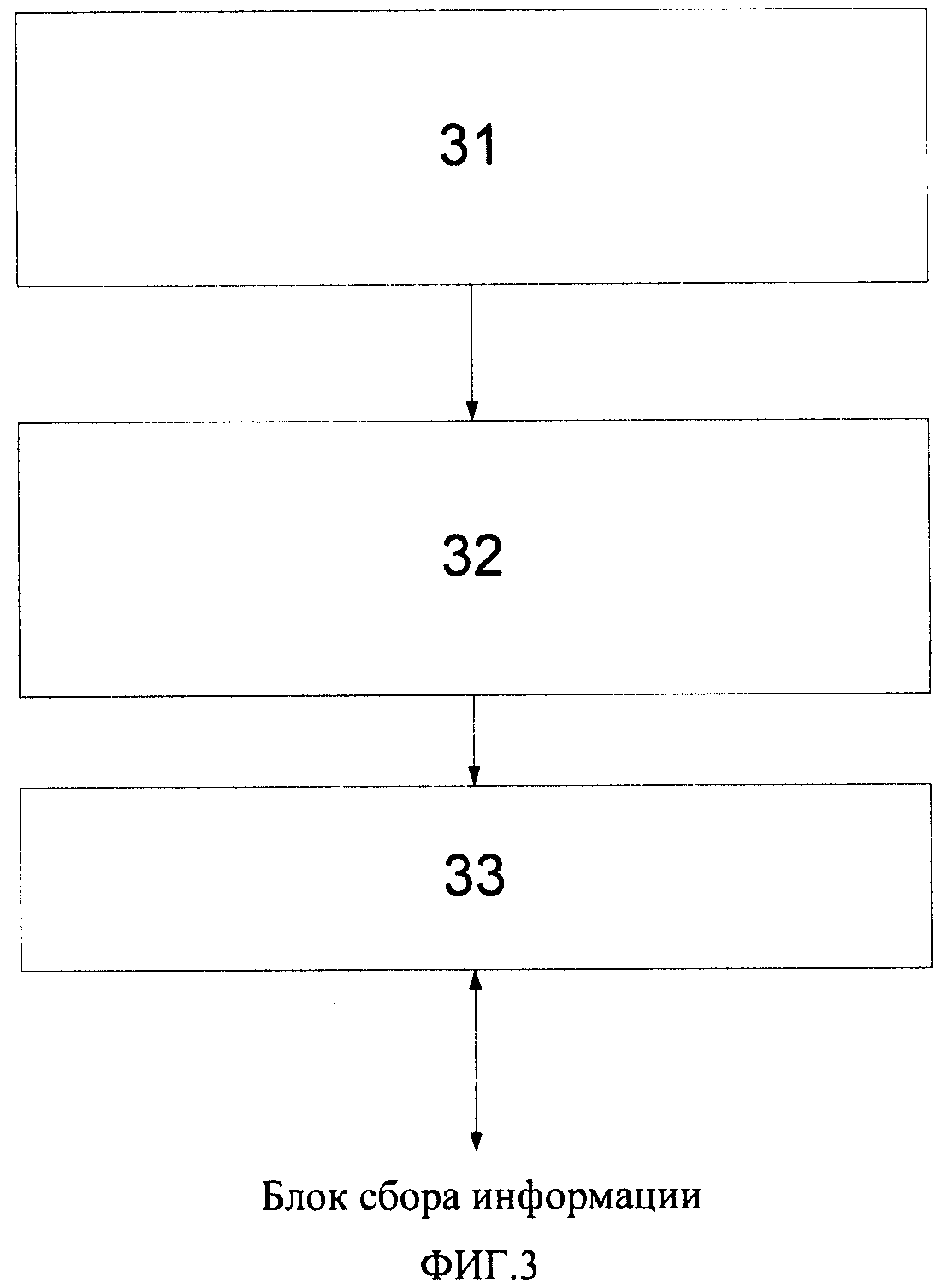
Блок сбора информации (см. Фиг.3) содержит последовательно соединенные буферные регистры 31 элементы гальванической развязки 32 и согласующее устройство, вход-выход которого является входом-выходом блока, подключенным к УВУ.
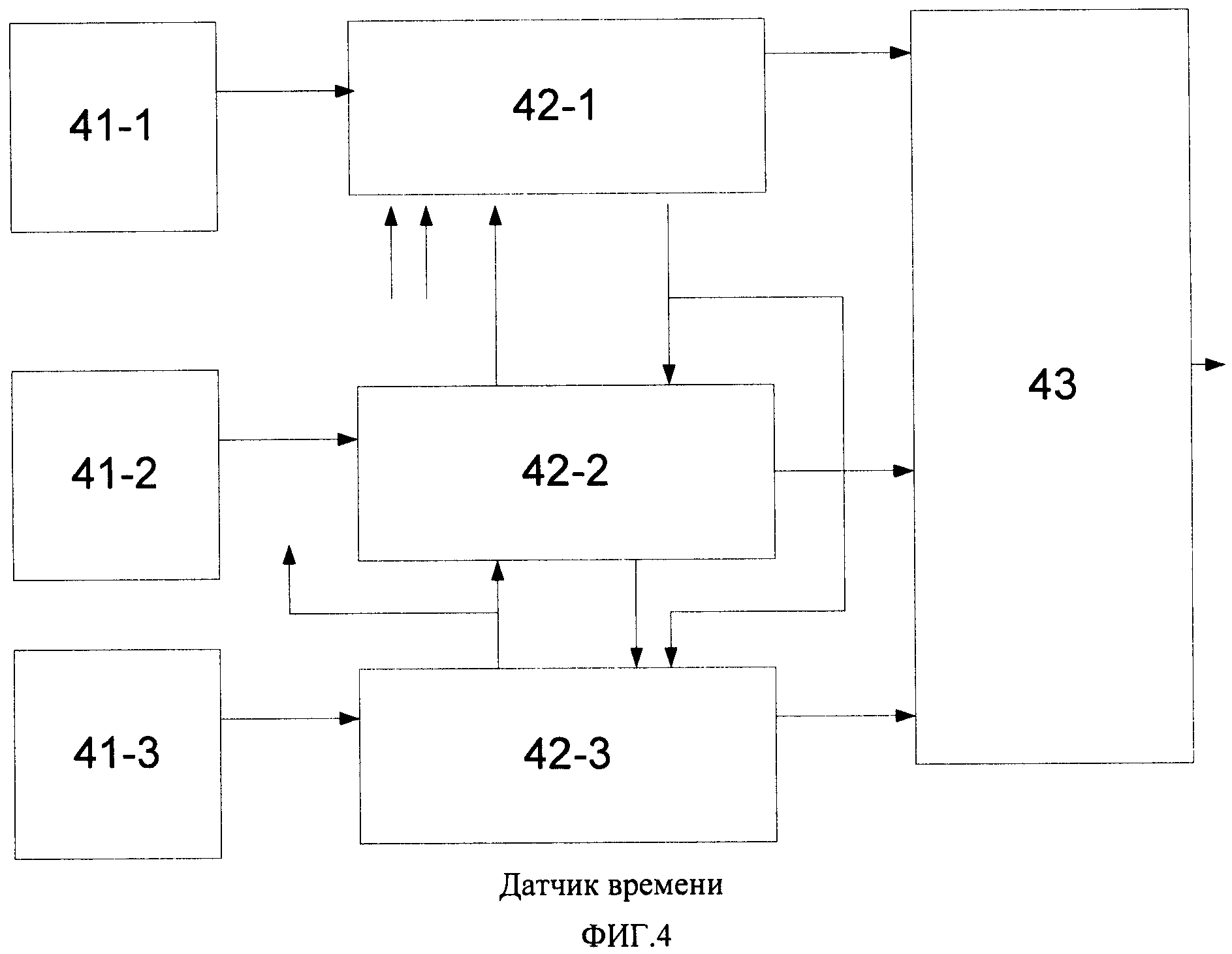
Датчик времени содержит три кварцованных генератора импульсов 41-1, 41-2 и 41-3, каждый из которых подключен к своему формирователю 42-1, 42-2 и 42-3, Фазирующий выход каждого из которых подключен к фазирующим входам двух других формирователей. Выходы формирователей подключены к мажоритарному элементу, выход которого является выходом формирователя и датчика в целом.. ФСИ реализован аналогично датчику времени с тем отличием, что генераторы импульсов выполнены не на основе кварцевых резонаторов, а на основе кольцевых генераторов изменяемым по внешнему коду количестве инверторов в кольце, что обеспечивает изменение частоты следования синхроимпульсов и подстройку быстродействия цифровых узлов под фактическое быстродействие полупроводниковых элементов, на которых реализованы эти узлы. Изменение быстродействия элементов связано с зменением температуры окружающей среды и(или) действия дозовах факторов внешнего тонизирующего излучения космического пространства и ядерно-энергетических установок объекта управления
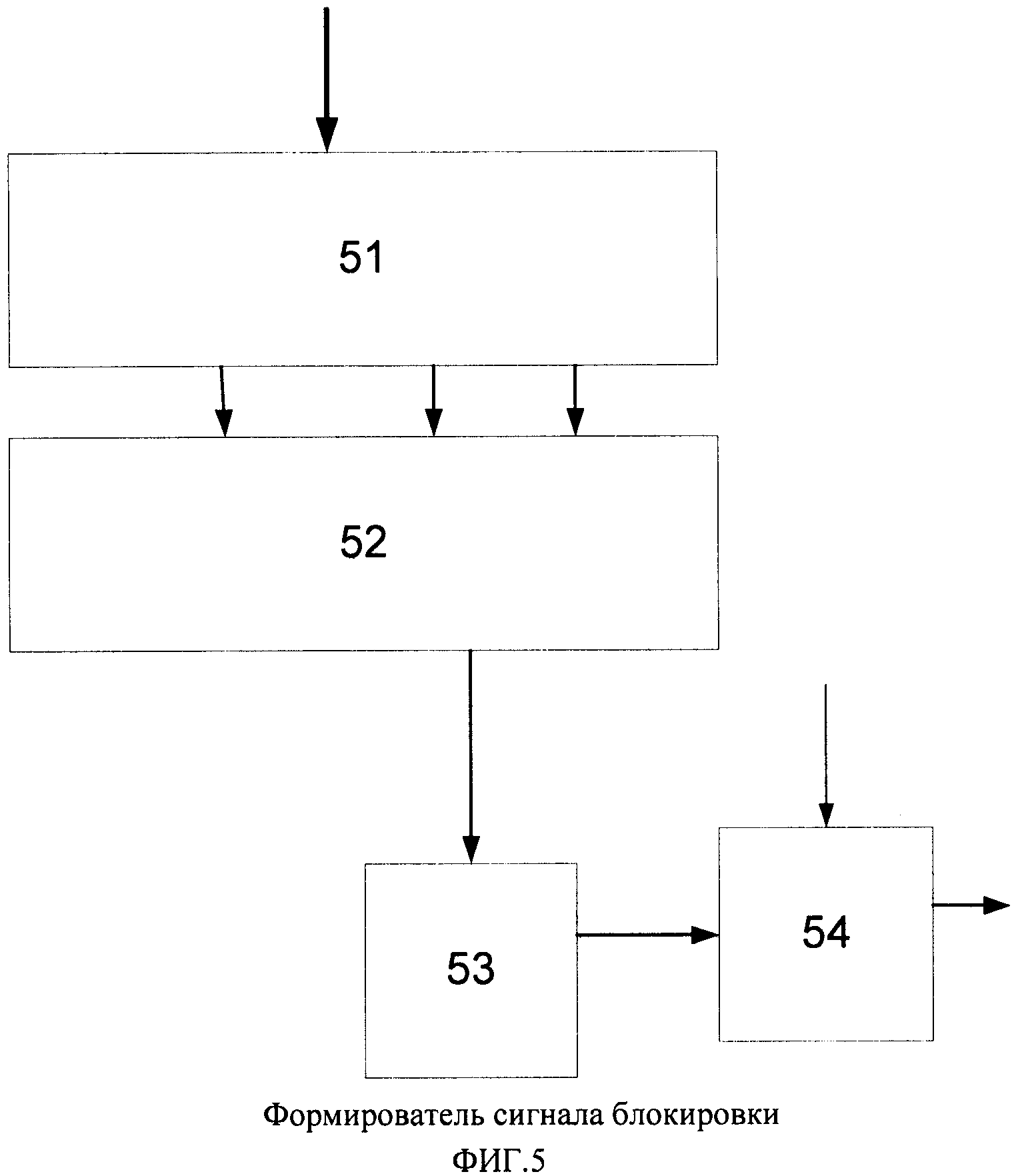
Формирователь сигнала блокировки (см. фиг.5) содержит последовательно соединенные регистр 51, вход которого является входом формирователя, подключенным к УВУ, дешифратор 52 и триггер 53, выход которого подключен е первому входу элемента И 54, второй вход которого является входом формирователя, подключенным в датчику внешнего воздействия, а выход элемента является выходом формирователя, подключенным к запоминающему устройству.
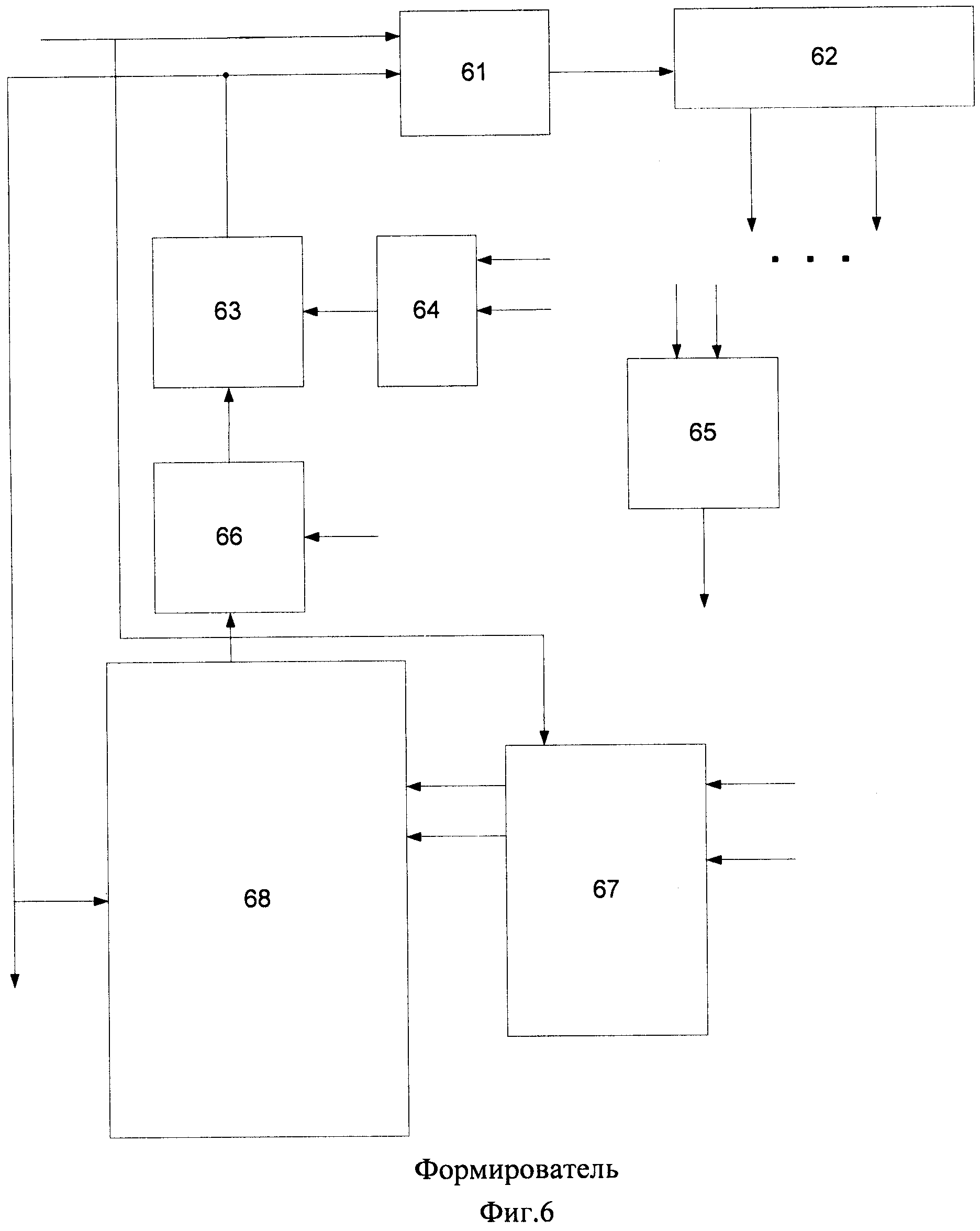
Формирователь сигнала (см. фиг.6) содержит элемент И 61, первый вход которого является входом формирователя, подключенным к генератору импульсов. Выход элемента подключен к счетчику 62, выходы которого подключены к входам первого 64 и второго 65 дешифраторов. Выход первого дешифратора подключен к входу триггера останова 63, выход которого является фазирующим выходом формирователя и подключен к второму входу элемента И и первому входу мажоритарного элемента 68, к второму и третьему входу которого подключены выходы триггеров привязки, входы которых являются фазирующими входами формирователя, их синхровход объединен с первым входом элемента И, а выход второго дешифратора является выходом формирователя.
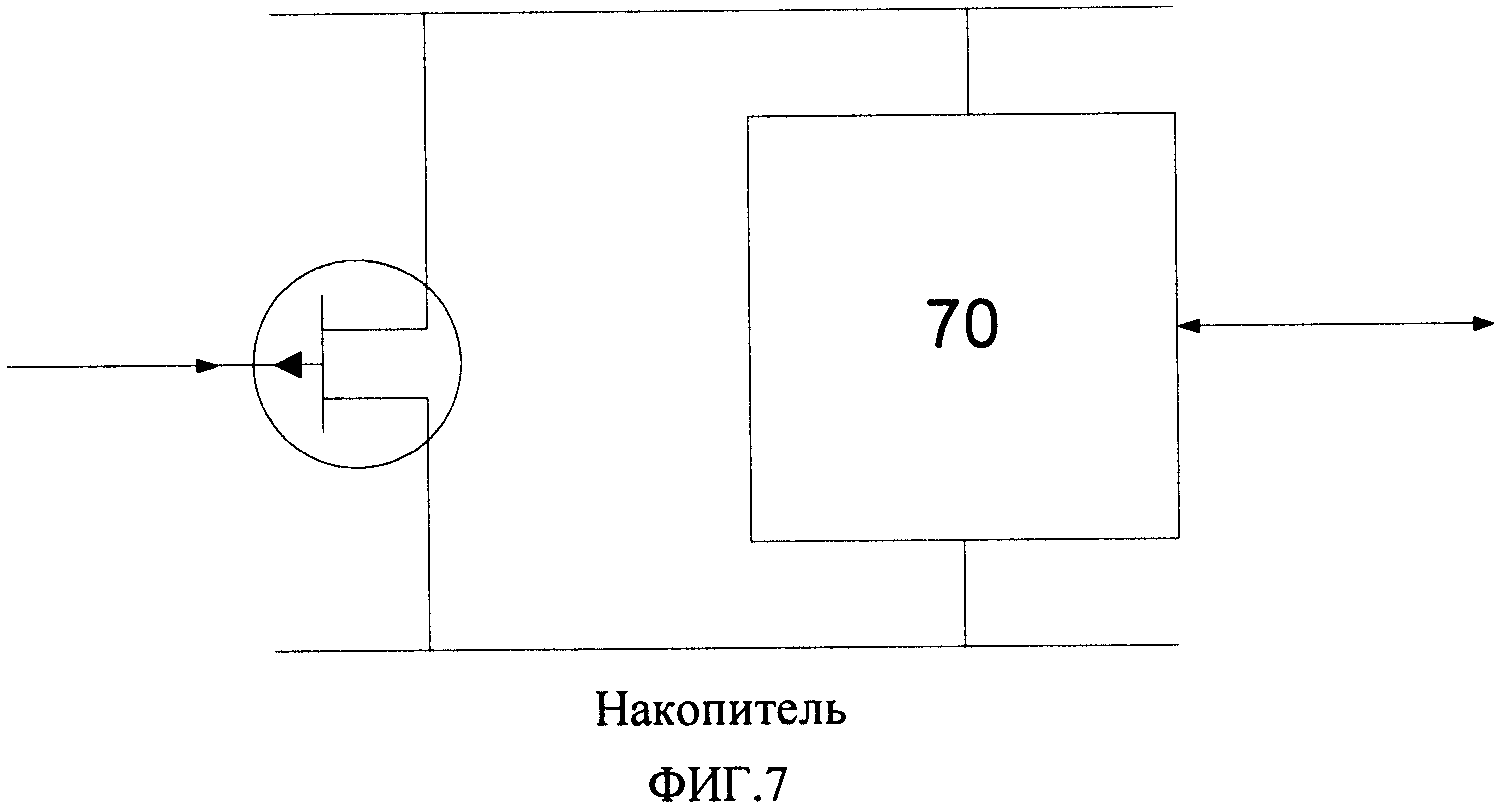
Накопитель (см. фиг.7) содержит узел хранения 70, информационный вход-выход которого является входом-выходом накопителя, а параллельно шинам обращения к узлу хранения установлен МОП транзистор со встроенным каналом, к затвору которого подключен сигнал блокировки накопителя.
Система может быть реализована следующим образом:
Управляющее вычислительное устройство, реализуется на основе БИС 1867ВМ2 или 1867ВМ3, изготавливаемых в производстве НИИЭТ г.Воронеж, дополненных БИС серий 1825, 1620 и БИС на основе БМК сер. 1555 и 1556, изготавливаемых АО «Ангстрем», г.Москва. На основе этих БМК реализуются БИС для блока связи, формирователя сигнала, датчика времени и цифровые узлы запоминающего устройства санкционированного доступа, накопители которого изготавливаются на основе многоотверстевых ферритовых пластин или цилиндрических тонких магнитных пленок в производстве ФГУП НПОА, г.Екатеринбург. В этом же производстве изготавливаются их дискретных компонентов кварцевые задающие генераторы датчика времени, датчик внешнего воздействия и устройства управления исполнительными органами объекта управления.
Наличие в составе системы датчика внешнего воздействия с формирователем сигнала блокировки и запоминающего устройства санкционированного доступа обеспечивают возможность рестарта (повторения вычислений) при сбоях вычислительного устройства и исключают ложную выдачу команд на исполнительные органы объекта управления., а введение режима перестройки частоты генераторов импульсов, входящих в состав ФСИ, обеспечивают подстройку частоты следования синхроимпульсов под фактическое быстродействие вычислительного устройства и других цифровых компонентов системы и обеспечивают их работоспособность при изменении в широком диапазоне температуры окружающей среды и накоплении дозовых параметрических изменений в полупроводниковых элементах, на которых реализуется аппаратура системы управления.
Таким образом, предложенная система в отличие от известных обладает повышенной надежностью и обеспечивает работоспособность при действии мощных импульсных электромагнитных и ионизирующих воздействиях в широком диапазоне изменения температуры окружающей среды и продолжительном воздействии внешнего ионизирующего излучения
Система обработки изображений
Вычислительное устройство бинс
Способ получения навигационной информации для автоматической посадки беспилотных летательных аппаратов (бла)
Несущий винт винтокрылого летательного аппарата с системой складывания лопастей
Опора для установки главного редуктора с несущим винтом
Несущий винт винтокрылого летательного аппарата с системой складывания лопастей
Система обработки изображений
Вычислительное устройство бинс

