Результат интеллектуальной деятельности: СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе помощи водителю транспортного средства, охарактеризованной в ограничительной части пункта 1 формулы изобретения, с одной стороны, и к соответствующему способу управления работой системы помощи водителю транспортного средства, охарактеризованному в ограничительной части пункта 6 формулы изобретения.
Уровень техники
Система и способ указанного выше назначения известны из публикации DE 10138001 А1. В этой публикации описано устройство для контроля эхо-сигналов, содержащее множество передатчиков и приемников, которые служат для посылки сигнала и приема эхо-сигнала, отраженного от внешнего предмета. При этом для оценки расстояния от устройства для контроля эхо-сигналов до внешнего объекта с помощью принятого эхо-сигнала предусмотрен блок обработки сигналов, который в одном режиме работы вычисляет на основании отраженных эхо-сигналов взаимное положение передатчиков и приемников относительно друг друга.
Основная идея известного технического решения состоит в том, что с помощью эхо-сигналов при известном расстоянии между приемниками и передатчиками можно не только измерять расстояние от них до препятствия, но также с помощью избыточных измерений - их удаление друг от друга. Измерение расстояния между приемниками и передатчиками называется также калибровкой. Поэтому достаточно, чтобы при встраивании устройства контроля эхо-сигналов заданные положения установки выдерживались лишь приблизительно. Несмотря на это, при последующем измерении расстояний между приемниками и передатчиками и использовании измеренных расстояний для анализа времени прохождения эхо-сигналов в обычном режиме работы можно точно определять расстояния до препятствия. При этом логическая и пространственная адресация используемых датчиков осуществляется при необходимости посредством так называемых соединений "точка-точка". В принципе под каждым прямым соединением между двумя абонентами сети понимается соединение "точка-точка".
Раскрытие изобретения
Предлагаемая в изобретении система помощи водителю транспортного средства, охарактеризованная признаками пункта 1 формулы изобретения, имеет то преимущество, что посредством датчиков (сенсоров), конструктивно одинаковых и различающихся только однозначными (уникальными) адресами, можно реализовать шину датчиков. При этом не обязательно должно быть известно, какие однозначные адреса имеют встроенные в шину датчики, чтобы обеспечить возможность их однозначной логической и пространственной адресации в системе. Существенно при этом то, что посылка сигнала датчика для генерирования эхо-сигнала датчика должна происходить таким образом, чтобы заранее известный логический адрес одного из датчиков ставился в соответствие его заранее определенному точному положению путем обработки (анализа) принятого эхо-сигнала. В конечном итоге за счет реализации шины датчиков достигается экономия проводов в кабельном стволе транспортного средства, причем используются конструктивно одинаковые датчики, отличающиеся только однозначным внутренним адресом, и соответственно имеющие различные серийные номера. Кроме того, возможно автоматическое присвоение положений абонентам шины, в частности датчикам, которое может осуществляться как при первичном вводе в эксплуатацию, так и в случае ремонта без специальных измерительных приспособлений. При этом шина датчиков обходится без системы сложных соединений "точка-точка", в частности без так называемого гирляндного (шлейфового) подключения.
Гирляндным подключением называется несколько аппаратных компонентов, последовательно соединенных друг с другом в шинной системе. При этом первый компонент непосредственно связан с процессором, прежде всего блоком управления. Другие компоненты связаны каждый со своим предшественником в смысле принципа последовательного подключения, что ведет к созданию цепочки компонентов. Сигнал к компоненту и от него проходит через его предшественников до процессора. Существенной при такой схеме соединений компонентов является возможность присвоения приоритетов. Таким путем можно определить, чтобы передача данных возможна, например, лишь в том случае, когда линия свободна или когда некоторые компоненты имеют безусловный приоритет перед другими компонентами, что позволяет исключить конфликты и сбои в системе.
То же самое относится к способу управления работой системы помощи водителю, охарактеризованной признаками пункта 6 формулы изобретения.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы.
В предпочтительном варианте осуществления изобретения эхо-сигнал может представлять собой переходный эхо-сигнал, прямой эхо-сигнал и/или перекрестный эхо-сигнал, что позволяет в зависимости от ситуации и назначения использовать различные виды эхо-сигналов. Под переходным эхо-сигналом понимают сигнал, возникающий, например, в том случае, если излученный датчиком сигнал, прежде всего ультразвуковой сигнал, распространяется вдоль поверхности блока датчиков, в результате чего на соседних датчиках возникают указанные эхо-сигналы. Прямой эхо-сигнал описывает ситуацию передачи и приема, в которой посланный датчиком сигнал в результате отражения возвращается непосредственно к тому же самому датчику. В случае же перекрестного эхо-сигнала речь идет об отражении сигнала, которое принимается не передавшим датчиком, а соседним датчиком.
В другом предпочтительном варианте осуществления изобретения дополнительно по меньшей мере к одному эхо-сигналу может быть предусмотрено использование по меньшей мере одного сигнала от транспортного средства. Эта комбинация сигналов играет определенную роль прежде всего при симметричном расположении датчиков, так как при этом установление однозначного соответствия установленных датчиков их положениям невозможно. При этом можно определить лишь некоторую заданную последовательность положений или отношений соседства между датчиками. Путем анализа или обработки дополнительных сигналов транспортного средства можно избежать перепутывания адресов датчиков из-за их симметричного расположения.
В предпочтительном варианте осуществления изобретения каждый отдельный датчик может конфигурироваться в качестве передатчика или в качестве приемника, что позволяет учесть различные ситуации установки датчиков и использовать различные варианты конфигураций.
В другом предпочтительном варианте осуществления изобретения каждый отдельный датчик может конфигурироваться в качестве передатчика и приемника, что позволило бы учитывать также прямые эхо-сигналы при адресации датчиков.
Преимущества вариантов системы, описанных в зависимых пунктах 2-5 формулы изобретения, в равной мере относятся и к соответствующим вариантам осуществления способа.
Краткое описание чертежей
Сущность изобретения поясняется ниже на примерах его осуществления в описании, не ограничивающем возможностей осуществления изобретения, но включающем в себя любые возможные варианты, изменения и эквиваленты, возможные в рамках патентных притязаний, и сопровождаемом чертежами, на которых показано:
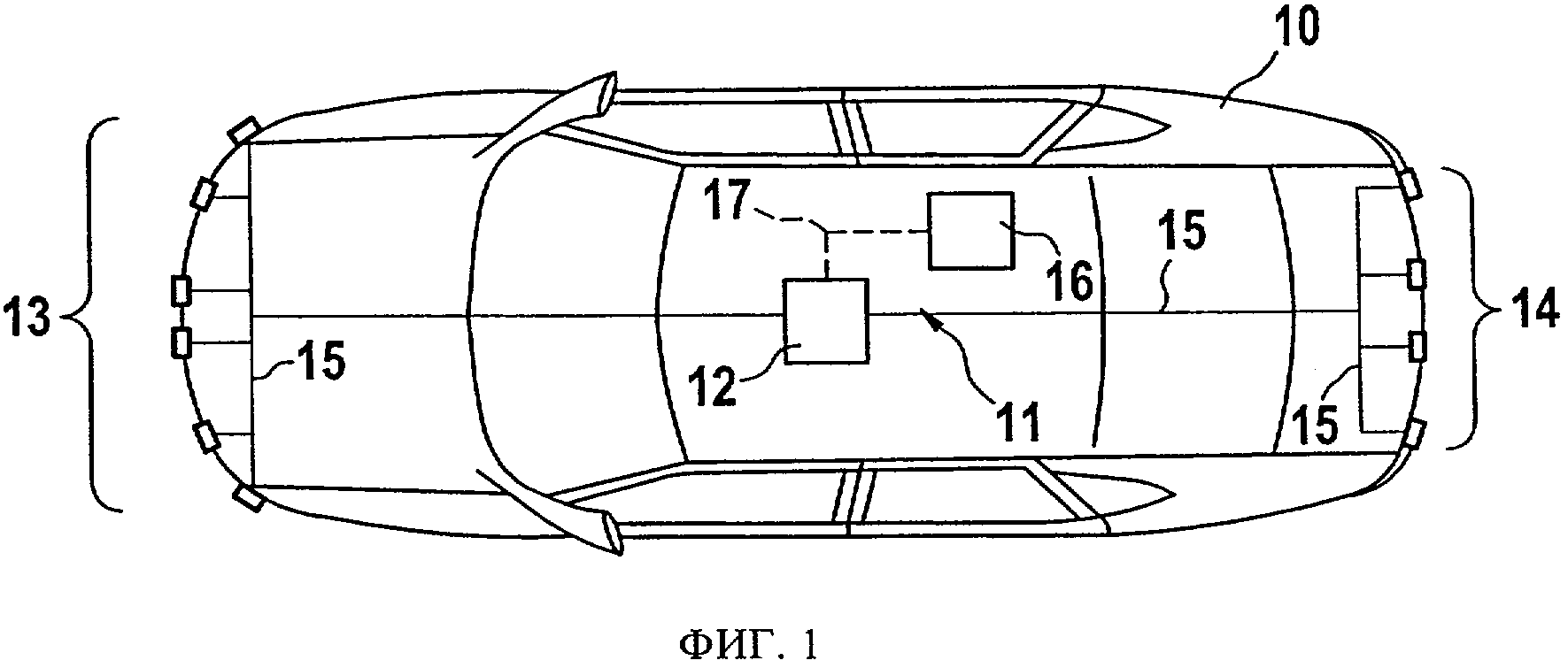
на фиг.1 - схематическое изображение транспортного средства с предлагаемой в изобретении системой помощи водителю,
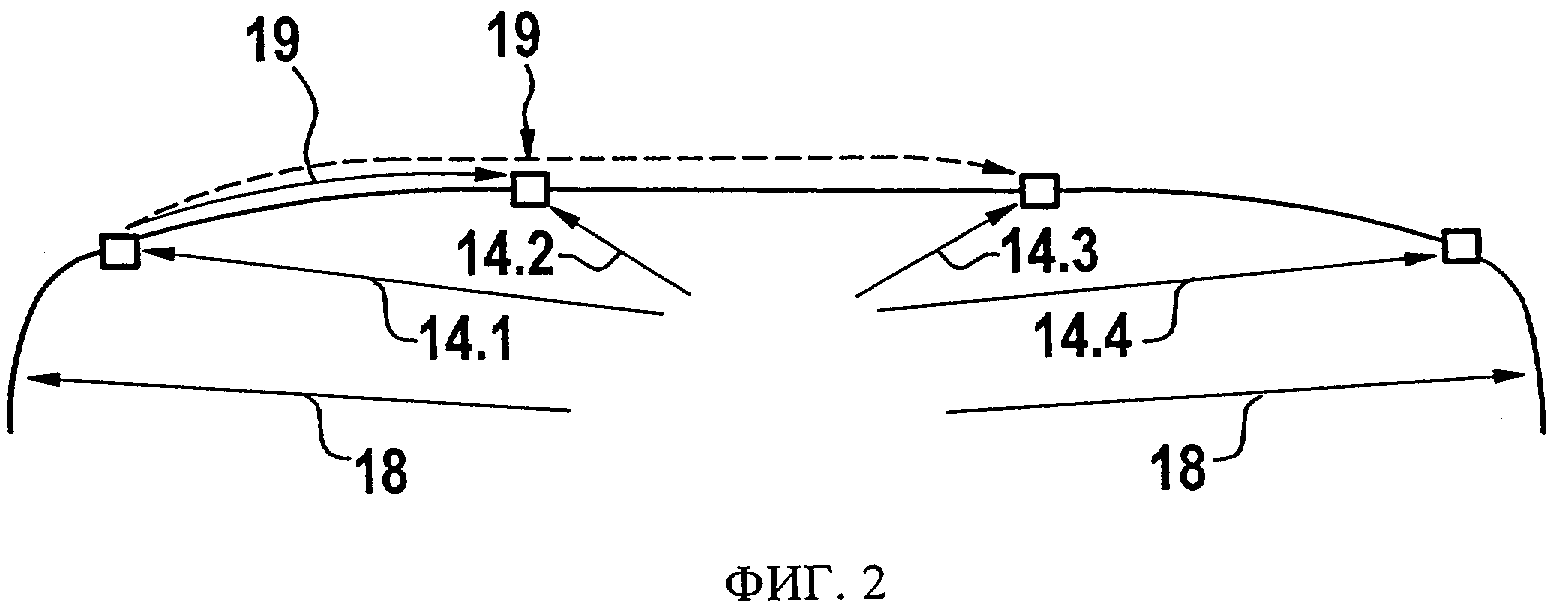
на фиг.2 - фрагмент транспортного средства с симметричным расположением датчиков в первой конфигурации датчиков,
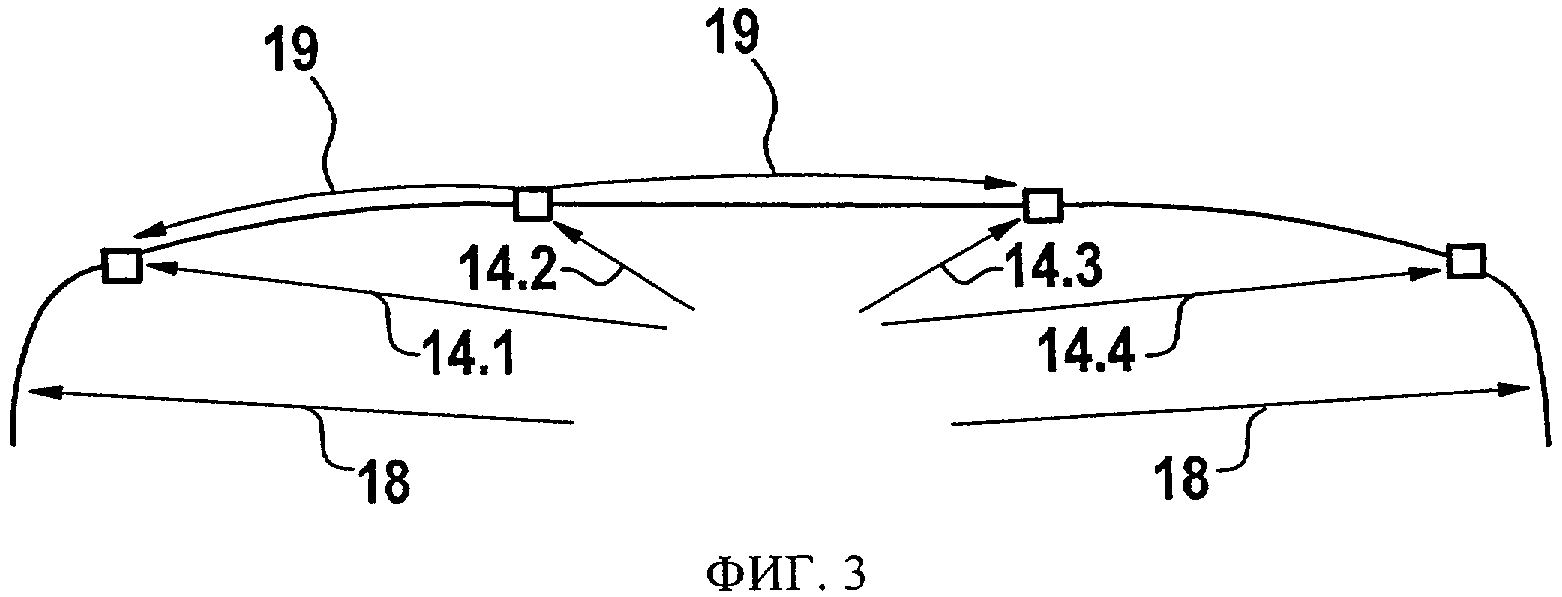
на фиг.3 - фрагмент транспортного средства, показанного на фиг.2, с симметричным расположением датчиков в другой конфигурации датчиков,
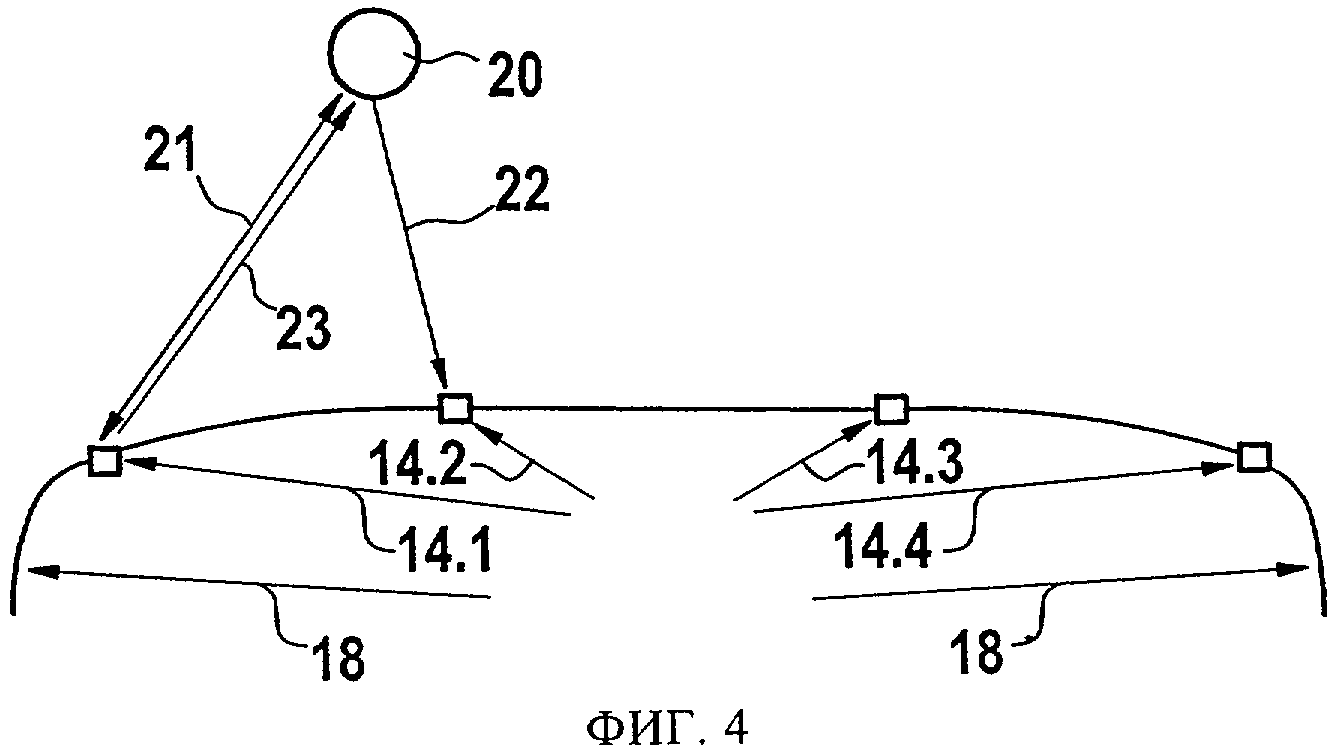
на фиг.4 - фрагмент транспортного средства, показанного на фиг.2, с симметричным расположением датчиков в конфигурации датчиков, учитывающей наличие препятствия,
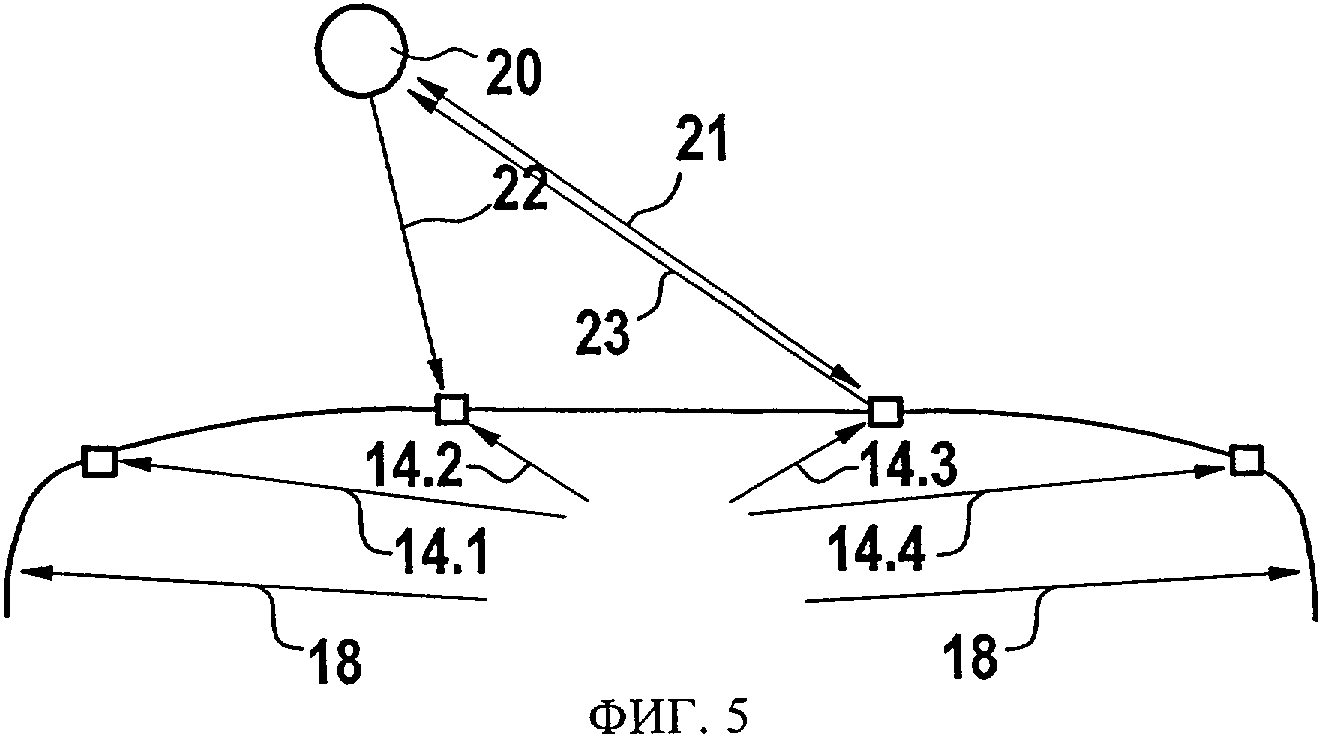
на фиг.5 - фрагмент транспортного средства, показанного на фиг.2, с симметричным расположением датчиков в другой конфигурации датчиков, учитывающей наличие препятствия,
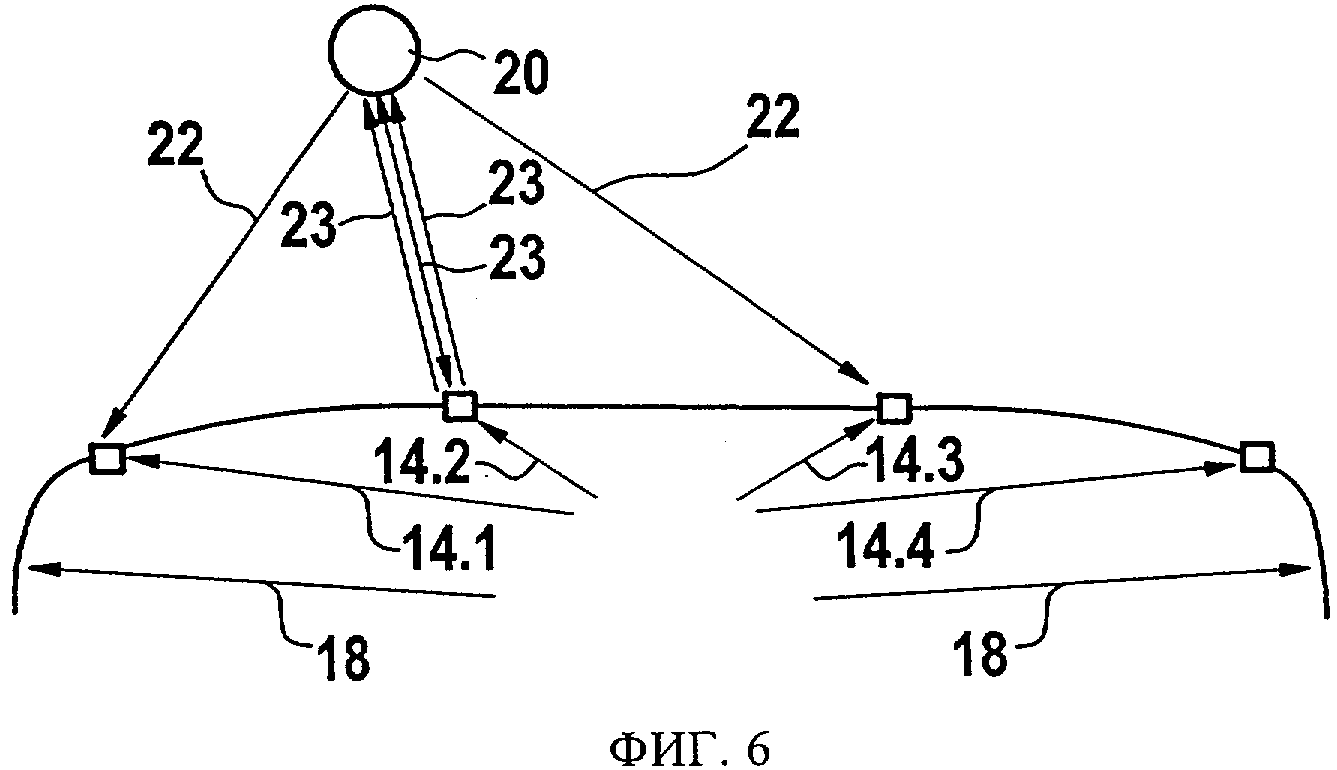
на фиг.6 - фрагмент транспортного средства, показанного на фиг.2, с симметричным расположением датчиков в третьей конфигурации датчиков, учитывающей наличие препятствия,
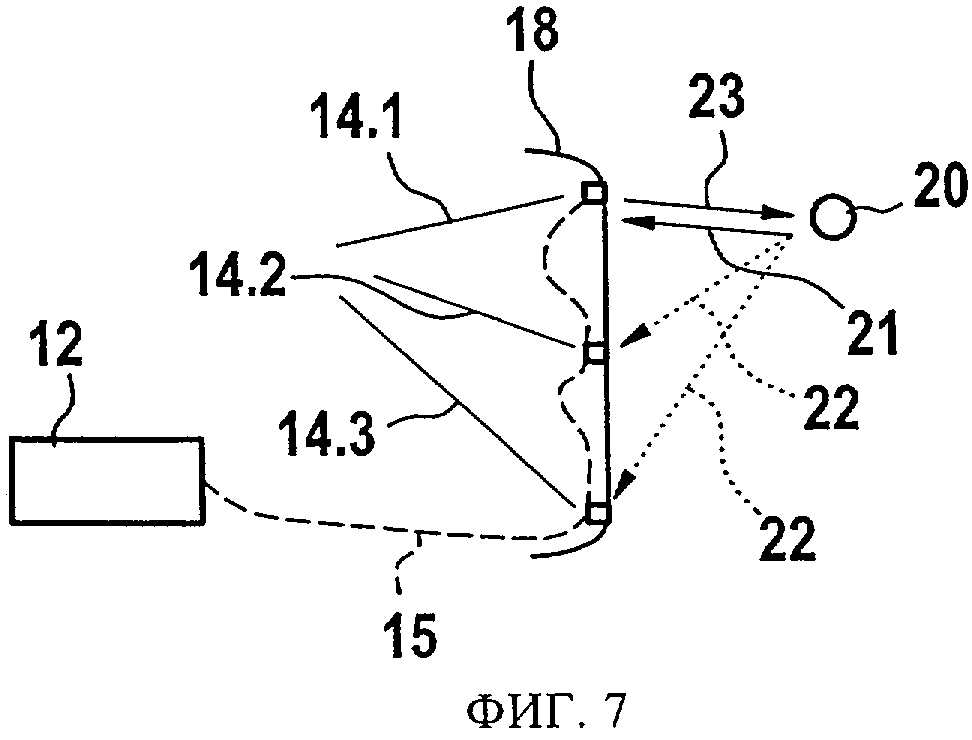
на фиг.7 - фрагмент транспортного средства с шиной данных и устройством управления, а также с сенсорной системой, включающей в себя три датчика в конфигурации датчиков, учитывающей наличие препятствия.
Осуществление изобретения
На фиг.1 показано транспортное средство 10, прежде всего автомобиль, с системой 11 помощи водителю. Система 11 помощи водителю называется также парковочным ассистентом (парктроник), вспомогательным средством парковки или системой помощи при парковке. Основными компонентами системы 11 помощи водителю являются устройство 12 управления, прежде всего электронный блок управления, серия передних датчиков 13 и другая серия задних датчиков 14. Датчиками 13, 14 являются так называемые ультразвуковые датчики. Датчики 13, 14 связаны одной или несколькими шинами 15 датчиков с устройством 12 управления с возможностью обмена данными, причем устройство 12 управления выполняет функцию ведущего, а датчики 13, 14 - функцию ведомых. Кроме того, устройство управления посредством промышленной шины 17 соединено с центральным процессором 16 и/или с другим устройством управления. В качестве промышленной шины 17 можно использовать, например, так называемую шину протокола CAN (Control Area Network), по которой сигналы от транспортного средства поступают в устройство 12 управления. Речь при этом идет об асинхронной, последовательной шинной системе, которая служит для соединения в сеть устройств управления в транспортных средствах, чтобы уменьшить длину используемых кабельных жгутов в целях экономии материала и уменьшения веса транспортного средства.
Шина 15 данных может быть выполнена также в виде шины протокола LIN (Local Interconnect Network). Такая шина служит для обеспечения экономичной связи между интеллектуальными датчиками и исполнительными механизмами в транспортном средстве. Возможно также применение так называемого интерфейса PSI (Peripheral Sensor Interface), представляющего собой 10-разрядный коммуникационный интерфейс (устройство сопряжение). К интерфейсу по двухпроводной линии можно подключать несколько каналов связи с датчиками. Это обеспечивает возможность свободной компоновки системы при одновременном снижении затрат. Через интерфейс PSI надежно передаются как данные от датчиков, так и информация, касающаяся состояния датчиков, типа датчиков и диапазона измеряемых ими значений.
На фиг.2 показан фрагмент системы 11 помощи водителю, которая включает в себя, например, задние датчики 14, встроенные в бампер 18 транспортного средства 10. При известном логическом адресе датчиков 14 в фазе инициализации управление датчиками 14 осуществляется в специальном режиме измерения устройством 12 управления. При этом устройством 12 управления последовательно даются команды каждому датчику по отдельности на излучение ультразвуковых импульсов 23. Одновременно все остальные датчики переводятся в режим работы только на прием. При этом на виде сверху первый задний датчик 14.1 установлен на левой внешней кромке бампера 18. На расстоянии от первого заднего датчика 14.1 находится второй задний датчик 14.2, за ним следует третий задний датчик 14.3, который расположен на правой внешней кромке бампера 18 на расстоянии от четвертого заднего датчика 14.4. Ультразвук, излученный первым задним датчиком 14.1, сконфигурированным в качестве передатчика, распространяется вдоль поверхности бампера 18, поэтому на соседнем датчике 14.2, а также, как возможный вариант, на следующем датчике 14.3 возникают так называемые переходные (неотраженные) эхо-сигналы 19. Переходные эхо-сигналы 19 детектируются сконфигурированными в качестве приемников задними датчиками 14.2-14.3 и сообщаются устройству 12 управления. Как только все датчики 14 выполнят передачу, и все соответствующие переходные эхо-сигналы 19 будут переданы в устройство 12 управления, по различному времени прохождения переходных эхо-сигналов 19 при известных возможных положениях датчиков 14 в бампере 18 можно точно определить пространственное положение или географический (физический) адрес датчиков 14, т.е. даже если известны положения установки датчиков, можно определить, в каком положении установлен датчик с тем или иным адресом. Согласно фиг.3 второй датчик 14.2 сконфигурирован (настроен) в качестве передатчика, тогда как оба соседних с ним датчика 14.1 и 14.3 служат в качестве приемников.
При симметричном расположении датчиков 14 в бампере 18 однозначное соотнесение их с географическими (физическими) положениями не представляется возможным. Можно определить только последовательность положений или отношения соседства между соответствующими датчиками 14. Ввиду симметричного расположения датчиков 14 можно перепутать датчики левой стороны с датчиками правой стороны и наоборот, поскольку переходные эхо-сигналы 19 датчика 14.1 соответствуют переходным эхо-сигналам датчика 14.4, а переходные эхо-сигналы 19 датчика 14.2 - переходным эхо-сигналам датчика 14.3. Однако эту проблему правильного соотнесения можно решить путем анализа сигналов транспортного средства, в частности сигналов, поступающих из систем транспортного средства и характеризующих состояние компонентов транспортного средства, например, сигналов угла поворота рулевого колеса, импульсов от колес и т.п., в ситуациях возникновения препятствий в динамике.
На фиг.4 и 5 воспроизведена структура системы датчиков, показанных на фиг.2 и 3, причем устройство 12 управления при известных логических адресах датчиков 14 может последовательно подавать на них команды на выполнение измерений. Процесс измерения включает в себя посылку ультразвуковых импульсов 23 и последующее измерение времени прохождения сигнала, пока в соответствующий передатчике или приемник не попадет отраженный от препятствия 20 эхо-сигнал, прежде всего прямой эхо-сигнал 21 и/или перекрестный эхо-сигнал 22. При этом все не ведущие передачу датчики 14 одновременно приводятся в состояние готовности к приему. Согласно фиг.4 первый датчик 14.1 и согласно фиг.5 третий датчик 14.3 сконфигурированы в качестве передатчиков. В каждом цикле передачи все датчики подтверждают момент времени приема эхо-сигнала или эквивалентное расстояние устройству 12 управления. Частота повторения измерений при этом такова, чтобы препятствие 20 между двумя следующими друг за другом замерами отдельного датчика 14 совершало лишь минимальное перемещение. Таким образом, путем анализа эхо-сигналов, отраженных от препятствия 20, можно в конечном итоге определить географический адрес датчиков 14.
На фиг.6 показан фрагмент возможной серии измерений для системы из четырех датчиков, в которой второй датчик 14.2 сконфигурирован в качестве передатчика. На основании посылаемой последовательно датчиками 14 на устройство 12 управления информации о расстоянии и ее временной характеристики можно определить положения датчиков 14 в бампере 18 и по ним - географический (физический) адрес. Координаты возможных положений датчиков в бампере 18 должны быть известны, чтобы с помощью принятых эхо-сигналов, прежде всего прямого эхо-сигнала 21 и/или перекрестного эхо-сигнала 22 поставить в соответствие отдельным датчикам 14 положения в бампере 18.
В описанном выше способе при симметричном расположении датчиков 14 в бампере 18 однозначная географическая привязка датчиков (однозначное соотнесение конкретных датчиков с географическими положениями) также невозможна. Можно определить лишь последовательность положений или отношения соседства датчиков 14 по отношению друг к другу. Однако из-за симметрии расположения возможно перепутывание положений датчиков, расположенных слева и справа и наоборот. Если дополнительно к информации о расстоянии анализировать сигналы от транспортного средства, становится возможным однозначное соотнесение датчиков со стороной, на которой он расположен. На основе сигналов транспортного средства, например угла поворота рулевого колеса, импульсов от колес и т.п., определяют движение транспортного средства и регулируют его по измеренному расстоянию и его временной характеристике. Если, например, препятствие 20, в частности круглое препятствие, находится точно перед вторым датчиком 14.2 и автомобиль с поворотом управляемых колес влево движется на препятствие 20, то самым коротким измеренным расстоянием сначала проходит прямой эхо-сигнал 21 второго датчика 14.2. Поворот управляемых колес влево ведет к тому, что препятствие 20 все больше приближается ко второму датчику 14.2. Путем анализа временной характеристики эхо-сигналов 21, 22 и их коррелирования с данными или сигналами транспортного средства можно однозначно определить, на какой стороне расположен тот или иной из датчиков 14.
На фиг.7 схематически показан другой вариант базирующейся на шине данных системы 11 помощи при парковке, которая служит для определения конфигурации положения датчиков. Система помощи при парковке работает, например, на основе ультразвуковых датчиков 14.1-14.3. При этом путем измерения времени прохождения звука определяют расстояние между объектом, в частности препятствием 20, и ультразвуковыми датчиками 14. Затем в зависимости от измеренного расстояния водитель транспортного средства 10, показанного на фиг.1, получает предупреждение о расстоянии в виде звукового и/или светового или иного сигнала. В простых системах анализируют, как правило, только прямой эхо-сигнал 21 между датчиками 14 и препятствием 20. При этом в качестве приемника включают только датчик, пославший ультразвуковой импульс 23. Другие датчики 14 в этой связи не учитываются. В сложных системах анализируют также перекрестные эхо-сигналы 22. При этом в качестве приемников включают и другие датчики 14, вследствие чего часть отраженного от препятствия 20 ультразвука обнаруживается этими другими датчиками 14. Это позволяет очень быстро, например, путем сравнения времени прохождения прямых эхо-сигналов 21 и перекрестных эхо-сигналов 22, определить, находится ли препятствие в виде столбика между двумя ультразвуковыми датчиками или прямо перед одним из ультразвуковых датчиков 14. На этом основании вычисляют эффективное и фактическое расстояние до бампера 18 и используют его для сигнализации приближения к препятствию.
В этом случае все датчики 14 также подключены к центральному устройству 12 управления, причем шинная система 15 служит для связи между устройством 12 управления и соответствующим датчиком 14. В рассматриваемом примере исполнения шинная система может также быть выполнена в виде шины на основе протокола CAN или LIN. При этом в наиболее благоприятном случае на устройстве 12 управления можно предусмотреть всего один сигнальный вывод, если датчики 14.1, 14.2, 14.3 подключены к шине 15 последовательно. Кроме того, длина используемых кабелей уменьшается по сравнению с обычным проводным монтажом, так как необходимо лишь проложить 5 м кабеля между устройством управления и датчиками 14, а также по 1,5 м между датчиками 14. Важным условием при этом является то, что устройству 12 управления должно быть известно, где на бампере 18 находится каждый отдельный датчик 14, чтобы анализ перекрестных эхо-сигналов 22 функционировал правильно.
Систему 11 можно при этом откалибровать, установив после монтажа датчиков 14 перед датчиками 14 соответствующее препятствие 20 и перемещая его. Система 11 на основе прямых и перекрестных эхо-сигналов измеряет расстояния между датчиками 14 и препятствием 20. Путем сравнения значений расстояния устройство 12 управления определяет наиболее достоверное расположение датчиков, соответствующие зарегистрированным значениям расстояния. Система 11 сохраняет эту конфигурацию в памяти, прежде всего в памяти ЭСППЗУ, флэш-памяти или буферном ЗУПВ и т.д., например, в устройстве 12 управления или в датчиках 14. Калибровочную информацию в дальнейшем используют для расчета порогового расстояния, при котором водитель получает предупреждение, что в конечном счете позволяет свободно выбирать место монтажа ультразвуковых датчиков 14 без ущерба для функционирования системы в целом.
При этом систему 11 можно рассчитать таким образом, чтобы она имела минимальную функциональность в случае, если, например, перед проведением калибровки, т.е. когда еще отсутствуют значения калибровки или обнаружено изменение положения датчика или тому подобное, используются только прямые эхо-сигналы 21. Далее возможно, чтобы система 11 спорадически или регулярно перепроверяла результаты калибровки и при необходимости обновляла их, при необходимости в процессе парковки или в аналогичных ситуациях. При этом система 11 может быть построена таким образом, чтобы в случае не поддающейся однозначному определению последовательности датчиков 14 одновременно анализировать перемещение препятствия 20. Далее система 11 может быть выполнена так, чтобы в случае не поддающейся однозначному определению последовательности датчиков 14 давать частичные решения. Это имеет место в том случае, если можно определить только то, что первый датчик 14.1 и второй датчик 14.2 являются соседями, но отношения соседства между третьим датчиком 14.3 и двумя первыми датчиками 14.1 и 14.2 еще не известны. Такие частичные решения могут привлекаться уже для использования перекрестных эхо-сигналов 22 для известных отношений. Кроме того, частичные решения можно ступенчатым образом дополнять до полного решения, если, например, в одном процессе парковки определилось отношение соседства между первым датчиком 14.1 и вторым датчиком 14.2, а в другом процессе парковки -отношение соседства между вторым датчиком 14.2 и третьим датчиком 14.3.
Как показано на фиг.7, первый датчик 14.1 посылает ультразвуковой импульс, после чего измеряются три расстояния, а именно одно по прямому эхо-сигналу 21 и два по перекрестным эхо-сигналам 22.1, 22.2. Устройство 12 управления при этом распознает, что расстояние для прямого эхо-сигнала 21 меньше расстояния для второго перекрестного эхо-сигнала 22.2, и что расстояние для первого перекрестного эхо-сигнала 22.1 меньше расстояния для второго перекрестного эхо-сигнала 22.2. Отсюда следует, что первый датчик 14.1 и второй датчик 14.2 являются соседями. Далее устройство 12 управления распознает, что расстояние для прямого эхо-сигнала 21 меньше, чем расстояние для первого перекрестного эхо-сигнала 22.1, и что расстояние для первого перекрестного эхо-сигнала 22.1 меньше, чем расстояние для второго перекрестного эхо-сигнала 22.2. Отсюда следует, что первый датчик 14.1 находится дальше от третьего датчика 14.3, чем второй датчик 14.2 от третьего датчика 14.3. Наконец, отсюда делается вывод о том, что датчики 14 соседствуют друг с другом в последовательности: первый датчик 14.1, второй датчик 14.2 и третий датчик 14.3. При этом данная система 11 отличается простотой реализации и уменьшает последствия ошибок монтажа. Далее систему 11 можно использовать для дооборудования транспортных средств. Не требуются ни заводское кодирование датчиков 14 по положению, ни применение вариантов датчиков, специализированных для определенных положений.
Таким образом, в изобретении предлагается система помощи водителю, содержащая устройство управления, взаимодействующее с несколькими установленными на транспортном средстве датчиками путем обмена данными по шине данных, причем посылка сигнала для генерирования эхо-сигнала осуществляется таким образом, что заранее известный логический адрес одного из датчиков ставится в соответствие заранее определенному точному положению. При этом при известных логических адресах установленных датчиков определяют, в каком положении или месте бампера установлен тот или иной датчик. Условием для этого является необходимость установки датчиков в бампере только в определенных известных положениях. Точное знание того, в каком положении какой датчик установлен в бампере, является существенным для системы, так как устройство управления управляет датчиками индивидуально, и информация от датчиков, например принятые эхо-сигналы, должны однозначно соотноситься с географическим (физическим) положением в бампере, чтобы, например, выполнять точный расчет расстояния или приводить в действие визуальный индикатор, в частности дисплей с разрешением в поперечном направлении. При этом в созданной шинной системе датчиков не требуется предусматривать дополнительные компоненты или модификацию компонентов, например, в виде дополнительного вывода в датчике в случае системы с гирляндным (шлейфовым) подключением.
Топливная форсунка
Насос высокого давления
Соединительное устройство для шарнирного соединения щетки стеклоочистителя с ее рычагом по принципу бокового замка
Датчик для определения концентрации газообразных компонентов в отработавших газах двигателей внутреннего сгорания
Шестеренный насос
Система предупреждения столкновений для транспортного средства
Соединительный палец, технологическая машина и способ изготовления такого соединительного пальца
Электродинамический тормоз для универсального электродвигателя
Щетка стеклоочистителя бескаркасной конструкции
Система подачи топлива из бака в двигатель внутреннего сгорания
Электронный модуль
Узел-абонент коммуникационной системы с функционально отдельным устройством памяти событий передачи
Щетка стеклоочистителя с переходником для ее закрепления на ее рычаге
Насосный узел для подачи топлива, предпочтительно дизельного топлива, в двигатель внутреннего сгорания
Устройство впрыскивания топлива
Способ и система для управления по меньшей мере одним исполнительным органом
Соединительное устройство для датчика и датчик
Оптический дальномер
Ручная машина в виде перфоратора и/или отбойного молотка
Блок управления средствами безопасности для автомобиля

