Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПОЛЯ ПОРАЖЕНИЯ СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к полигонным испытаниям боеприпасов и может быть использовано в частности для измерения характеристик поля поражения снаряда.
Известен способ измерения скорости метаемого тела, заключающийся в размещении двух датчиков на заданном расстояние между собой, выполнении конструкции датчика в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, измерении моментов срабатывания между двумя датчиками в процессе движения метаемого тела, измерение скорости метаемого тела на основе измеренного временного интервала, определение комбинации сработавших элементов фотоприемников первого и второго датчиков в процессе движения метаемого тела, определение координат движения метаемого тела на основе информации о комбинации сработавших элементов фотоприемников, выдачи информации о скорости и координатах движения метаемого тела в блок индикации (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Известно устройство для измерения скорости метаемого тела, которое содержит два разнесенных датчика, первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые входы матрицы элементов И соединены с первыми входами блока логики, а вторые входы соединены со вторыми входами блока логики, а выходы элементов И соединены со входами триггеров, выходы которых соединены с блоком индикации (Ефанов В.В., Мужичек С.М., патент РФ на изобретение №2285267 от 10.10.2006 г.).
Недостатком данных способа и устройства является невозможность определения характеристик поля поражения снаряда, таких как количество эшелонированных групп осколков, скоростей их движения, углов подхода эшелонированных групп осколков к мишени, геометрических размеров осколков.
Технической задачей изобретения является повышения информативности за счет определения характеристик поля поражения снаряда.
Решение технической задачи достигается тем, что в способе, определения характеристик поля поражения снаряда заключающемся в размещении двух датчиков на заданном расстояние между собой, выполнении конструкции датчика в виде двух перпендикулярно расположенных линеек излучающих диодов и фотоприемников, измерении временного интервала срабатывания между первым и вторым датчиками в процессе движения снаряда, определении скорости снаряда на основе измеренного временного интервала, определении комбинации сработавших элементов фотоприемников первого и второго датчиков в процессе движения снаряда, определении координат движения метаемого тела на основе информации о комбинации сработавших элементов фотоприемников, выдаче информации о скорости и координатах движения снаряда в блок индикации, дополнительно размещают два датчика на заданном расстоянии между собой, выполняют конструкцию датчиков в виде трех перпендикулярно расположенных линеек излучающих диодов и фотоприемников, осуществляют подрыв снаряда на траектории движения и формируют поля поражения снаряда, фиксируют моменты времени и количество последовательных срабатываний элементов фотоприемников третьего и четвертого датчиков в процессе движения эшелонированной группы осколков снаряда к мишени, определяют количество эшелонированных групп осколков снаряда на основе количество последовательных срабатываний элементов фотоприемников, определяют временные интервалы между эшелонированными группами осколков снаряда на основе фиксации последовательностей моментов срабатывания третьего и четвертого датчиков, фиксируют комбинацию сработавших элементов фотоприемников в трех плоскостях, определяют координаты сработавших элементов фотоприемников на основе информации о комбинации сработавших элементов фотоприемников, определяют скорость движения эшелонированных групп осколков снаряда на основе данных о координатах и временных интервалах сработавших элементов фотоприемников третьего и четвертого датчиков в виде выражения  , где dni - расстояние между эшелонированными группами осколков снаряда относительно третьего и четвертого датчиков
, где dni - расстояние между эшелонированными группами осколков снаряда относительно третьего и четвертого датчиков  , Δti - время, которое определяет дискретность срабатываний элементов фотоприемников, x2i, x1i, y2i, y1i, z2i, z1i, - координаты эшелонированных групп осколков снаряда относительно третьего и четвертого датчиков в трех плоскостях, фиксируют количества одновременно сработавших элементов фотоприемников в трех плоскостях и на основе полученных данных определяют геометрические размеры осколков снаряда в виде выражений lx=ni, ly=nj, lz=nk, где n - количества одновременно сработавших элементов, i, j, k - линейные размеры, мм чувствительных элементов линеек фотоприемников в трех плоскостях, фиксируют изменение координат эшелонированных групп осколков снаряда относительно третьего и четвертого датчиков и на основе полученных данных определяют координаты Xi, Yi, Zi векторов движения эшелонированных групп осколков снаряда в виде выражения Xi=x1i-x2i, Yi=y1i-y2i, Zi=z1i-z2i определяют углы подхода эшелонированных групп осколков снаряда к мишени в виде выражений
, Δti - время, которое определяет дискретность срабатываний элементов фотоприемников, x2i, x1i, y2i, y1i, z2i, z1i, - координаты эшелонированных групп осколков снаряда относительно третьего и четвертого датчиков в трех плоскостях, фиксируют количества одновременно сработавших элементов фотоприемников в трех плоскостях и на основе полученных данных определяют геометрические размеры осколков снаряда в виде выражений lx=ni, ly=nj, lz=nk, где n - количества одновременно сработавших элементов, i, j, k - линейные размеры, мм чувствительных элементов линеек фотоприемников в трех плоскостях, фиксируют изменение координат эшелонированных групп осколков снаряда относительно третьего и четвертого датчиков и на основе полученных данных определяют координаты Xi, Yi, Zi векторов движения эшелонированных групп осколков снаряда в виде выражения Xi=x1i-x2i, Yi=y1i-y2i, Zi=z1i-z2i определяют углы подхода эшелонированных групп осколков снаряда к мишени в виде выражений  ,
,  , осуществляют индикацию величин скоростей движения эшелонированных групп осколков снаряда, геометрических размеров эшелонированных групп осколков снаряда в трех плоскостях, углов подхода эшелонированных групп осколков снаряда к мишени.
, осуществляют индикацию величин скоростей движения эшелонированных групп осколков снаряда, геометрических размеров эшелонированных групп осколков снаряда в трех плоскостях, углов подхода эшелонированных групп осколков снаряда к мишени.
Решение технической задачи достигается тем, что в устройство определения характеристик поля поражения снаряда состоящим из двух разнесенных датчиков и первого измерительного блока, который содержит первый и второй измерительные приборы, связанные с выходами датчиков, первый, второй, третий, четвертый элементы ИЛИ, первый и второй блоки логики, каждый из датчиков выполнен в виде двух перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, причем выходы горизонтально расположенной линейки фотоприемников первого датчика соединены одновременно с входами первого элемента ИЛИ и первыми входами первого блока логики, выходы вертикально расположенной линейки фотоприемников первого датчика соединены одновременно с входами второго элемента ИЛИ и вторыми входами первого блока логики, выходы горизонтально расположенной линейки фотоприемников второго датчика соединены одновременно с входами третьего элемента ИЛИ и первыми входами второго блока логики, выходы вертикально расположенной линейки фотоприемников второго датчика соединены одновременно с входами четвертого элемента ИЛИ и вторыми входами второго блока логики, выход первого и второго элементов ИЛИ соединены соответственно с первыми входами первого и второго измерительных приборов, выходы третьего и четвертого элементов ИЛИ соединены соответственно со вторыми входами первого и второго измерительных приборов, выход источника питания соединен с линейками излучающих диодов, блок логики состоит из матрицы элементов И, из матрицы триггеров, блока индикации, причем первые и вторые входы матрицы элементов И соединены с первыми и вторыми входами блока логики, а выходы элементов И соединены со входами триггеров, выходы которых соединены с блоком индикации, дополнительно введены третий, четвертый датчики, мишень, устройство для метания снаряда, устройство для срабатывания взрывателя снаряда, второй блок измерений, вычислитель определения скоростей движения эшелонированных групп осколков снаряда, вычислитель определения углов подхода эшелонированных групп осколков снаряда к мишени, блок определения геометрических размеров осколков снаряда, индикатор скоростей движения эшелонированных групп осколков снаряда, индикатор углов подхода эшелонированных групп осколков снаряда к мишени, индикатор геометрических размеров осколков снаряда, при этом третий и четвертый датчики выполнены в виде трех перпендикулярно расположенных линеек излучающих диодов и линеек фотоприемников, второй блок измерений содержит первый и второй блоки регистрации параметров перемещения осколков снаряда, первый и второй блок логики, причем первая, вторая, третья группа и четвертый выходы третьего и четвертого датчиков соединены соответственно с первой, второй, третьей группой и четвертым, пятой, шестой, седьмой группами и восьмым входами второго измерительного блока, входы которого являются соответственно первыми, вторыми, третьим группами и четвертым входами первого и второго блоков регистрации параметров перемещения осколков снаряда, первая, вторая, третья группа выходов которых соединены с первой, второй и третьей группой входов соответственно первого и второго блоков логики, группа выходов которых является соответственно первой и второй группой выходов второго блока измерений, которые соединены соответственно с первой и второй группой входов вычислителя определения скоростей движения эшелонированных групп осколков снаряда, первая и вторая группа выходов которого соединена с входами индикатора скоростей движения эшелонированных групп осколков снаряда и вычислителя определения углов подхода эшелонированных групп осколков снаряда к мишени, выход которого соединен с индикатором углов подхода эшелонированных групп осколков снаряда к мишени, первая, вторая и третья группа выходов второго блока регистрации параметров перемещения осколков снаряда соединены соответственно с первым, вторым и третьими входами блока определения геометрических размеров осколков снаряда, выходы которого соединены соответственно с первым, вторым и третьим входами индикатора геометрических размеров осколков снаряда.
Кроме того, блоки регистрации параметров перемещения осколков снаряда состоят из первой, второй и третьей групп элементов И, дифференцирующей цепи, генератора импульсов, сдвигового регистра, первого и второго элементов ИЛИ, при этом n-первые, n-вторые, n-третьи и четвертый входы блока регистрации параметров перемещения эшелонированных групп осколков снаряда, являются соответственно первыми входами n-первой, n-второй, n-третьей групп элементов И и входами дифференцирующей цепи, вторые входы n-первой и n-второй групп элементов И, соединены соответственно с выходами первого и второго элементов ИЛИ, выход дифференцирующей цепи соединен с третьим входом сдвигового регистра, второй и третий входы которого соединены соответственно с выходом генератора импульсов, и первым входом одного из n-третьих элементов И, каждый из выходов сдвигового регистра соединен со одним из вторых входов n-третьего элемента И, выходы которых соединены со входами первого и второго элемента ИЛИ, выходы n-первой, n-второй и n-третьей групп элементов И, являются соответственно n-первыми, n-вторыми и n-третьими группами выходов блока регистрации параметров перемещения осколков снаряда.
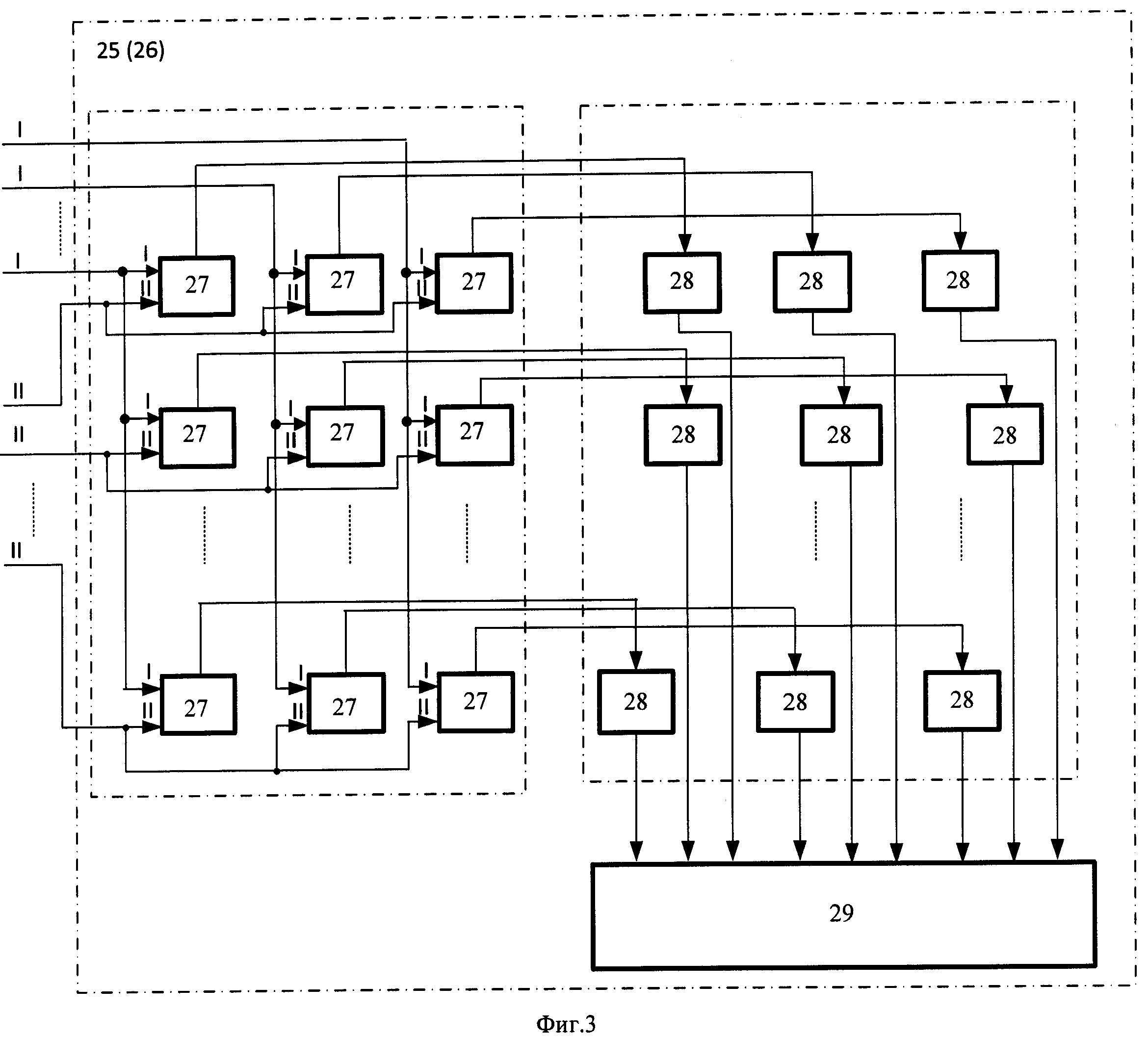
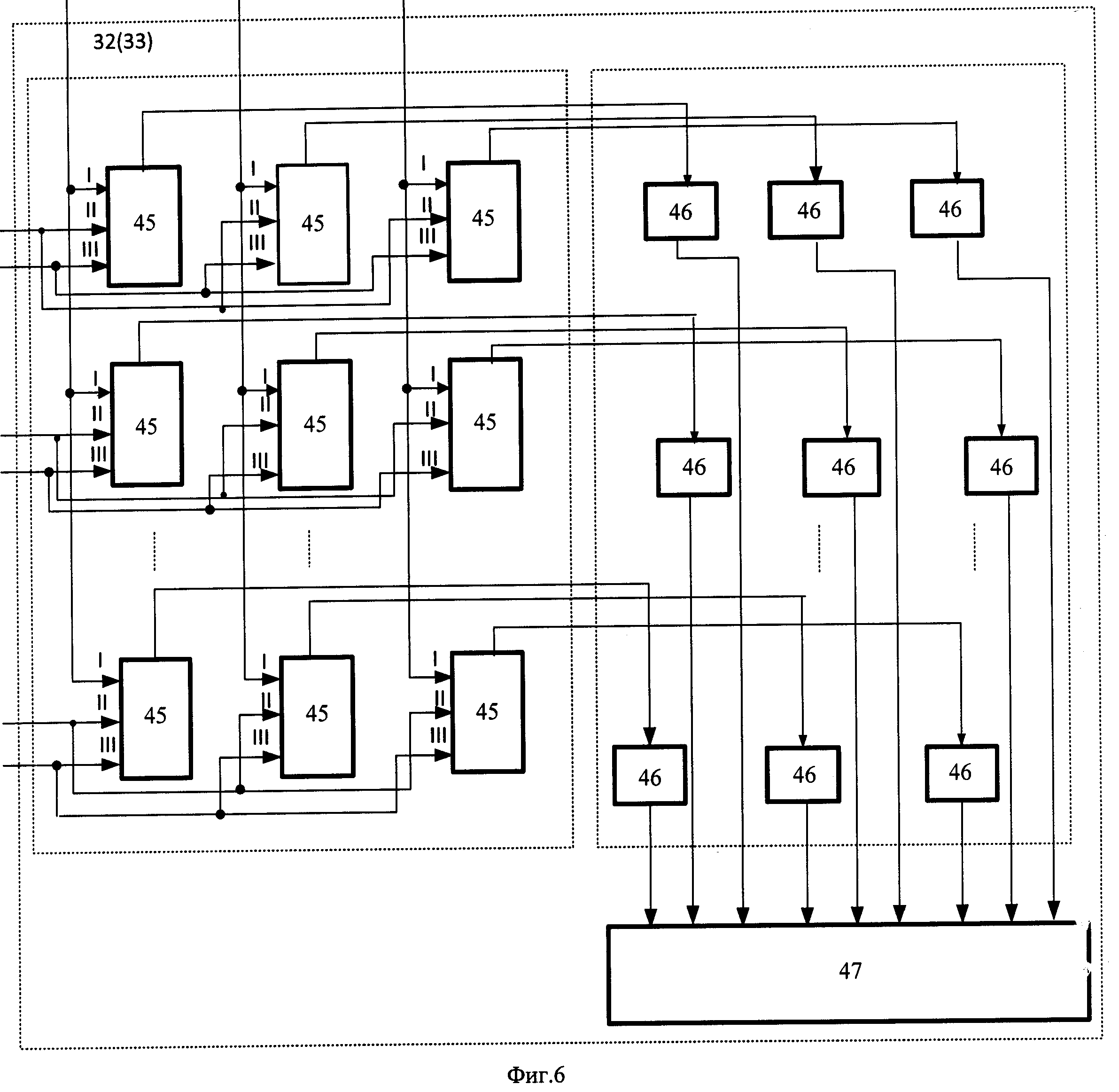
Кроме того, блоки логики состоят из квадратной матрицы n-порядка элементов И, из квадратной матрицы n-порядка триггеров, блока индикации, причем первые, вторые и третьи входы квадратной матрицы n-порядка элементов И соединены соответственно с первыми, вторыми и третьими входами блока логики, выходы квадратной матрицы n-порядка элементов И соединены со входами триггеров, выходы которых соединены с входами блока индикации.
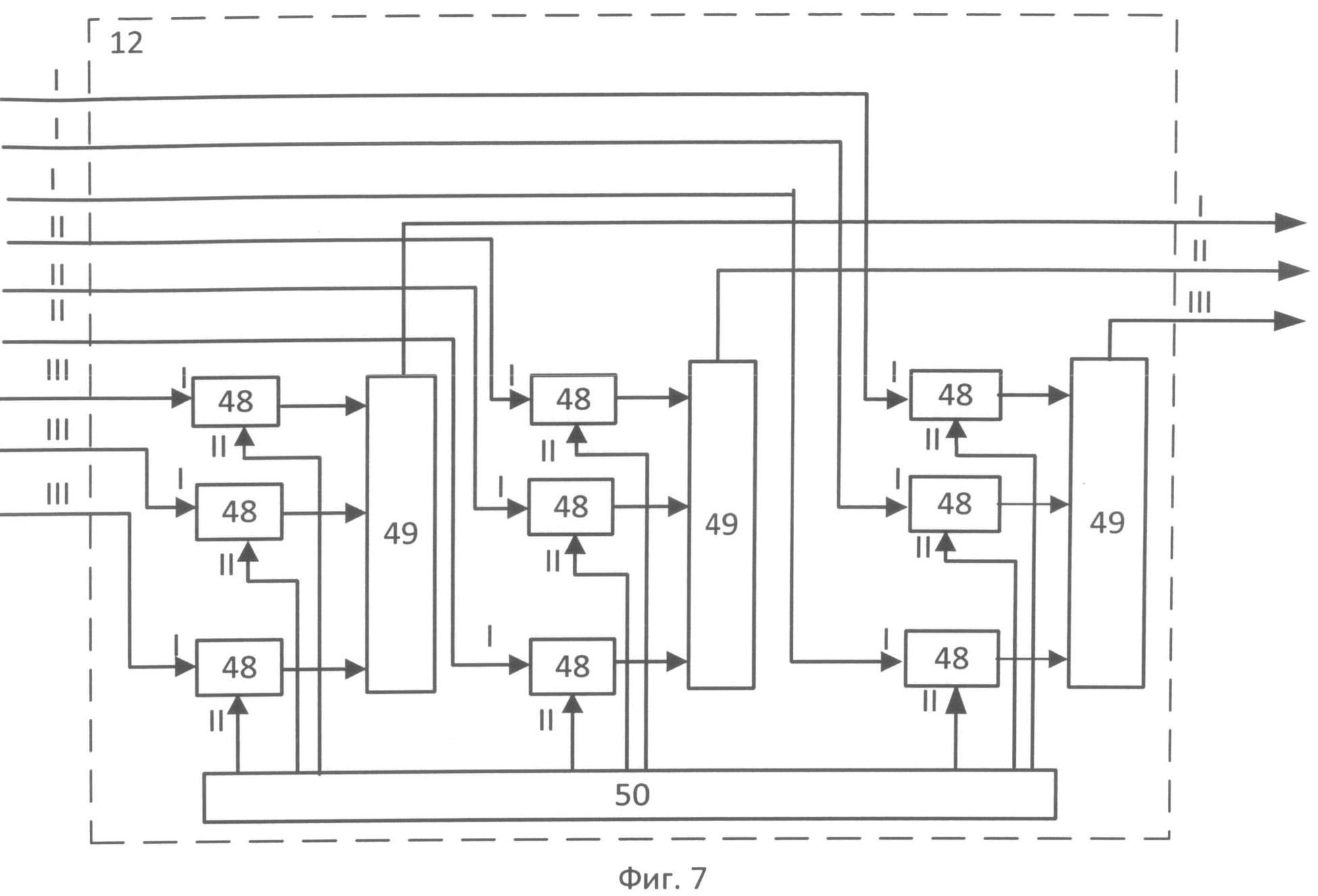
Кроме того блок определения геометрических размеров осколков снаряда состоит из квадратной матрицы n-ого порядка элементов И, квадратной матрицы n-ого порядка суммирующих устройств, задатчика сигналов, причем группа входов блоков определения геометрических размеров метаемого тела являются первыми входами квадратной матрицы n-ого порядка элементов И, вторые входы которых соединены с выходами задатчика сигналов, а выходы строк квадратной матрицы n-ого порядка элементов И, соединены со входами квадратной матрицы n-ого порядка суммирующих устройств, выходы которых являются выходами блока определения геометрических размеров осколков снаряда.
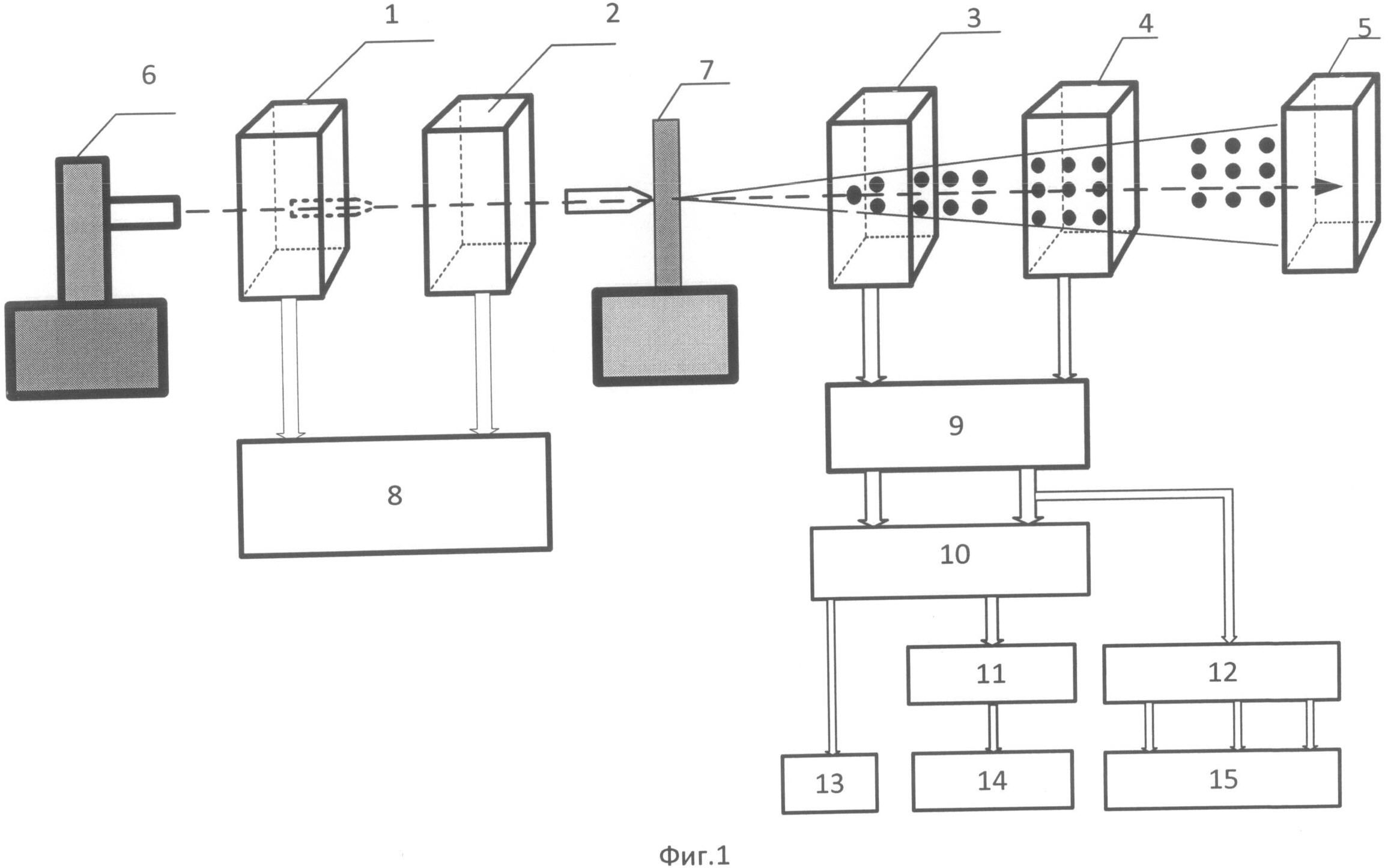
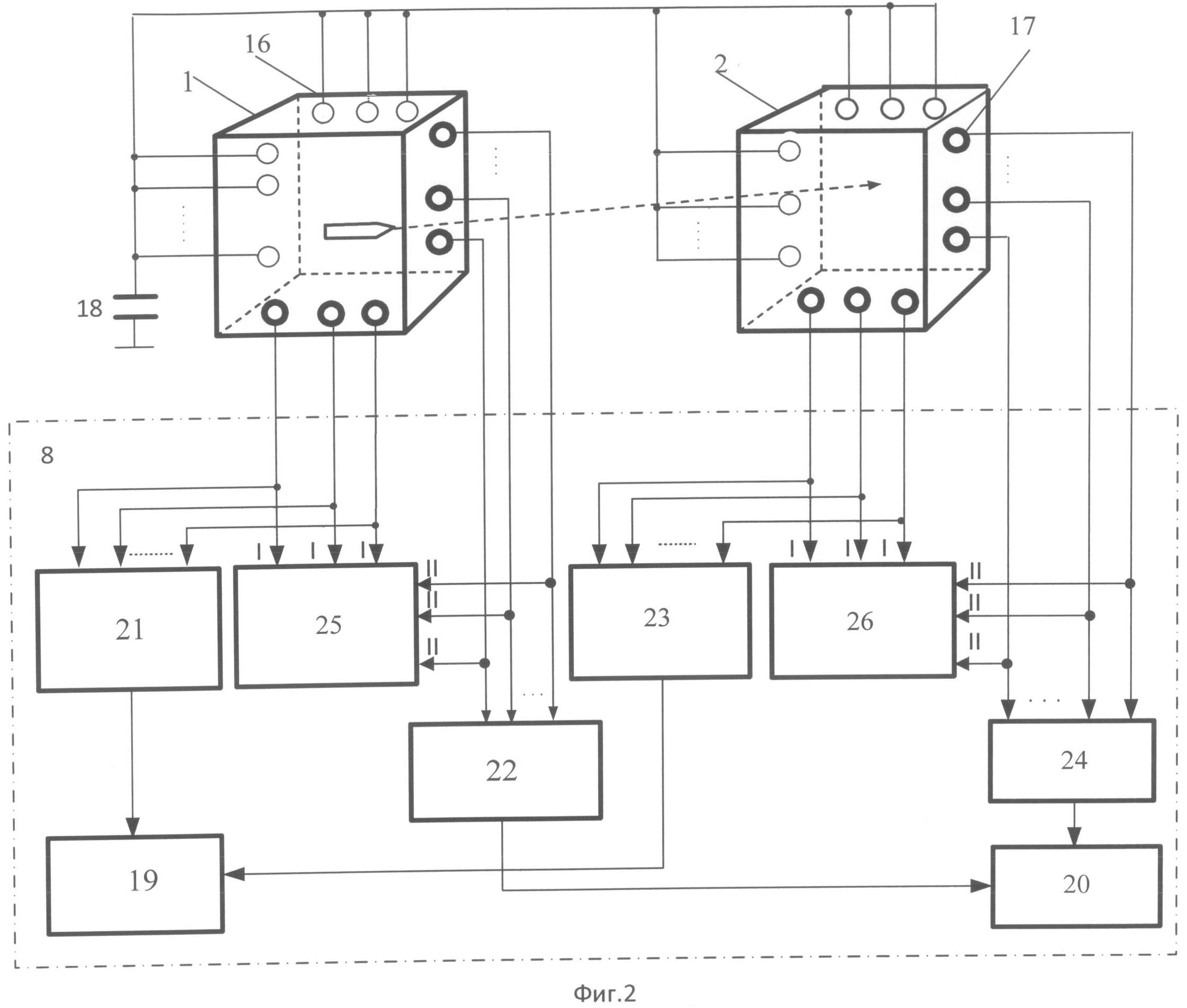
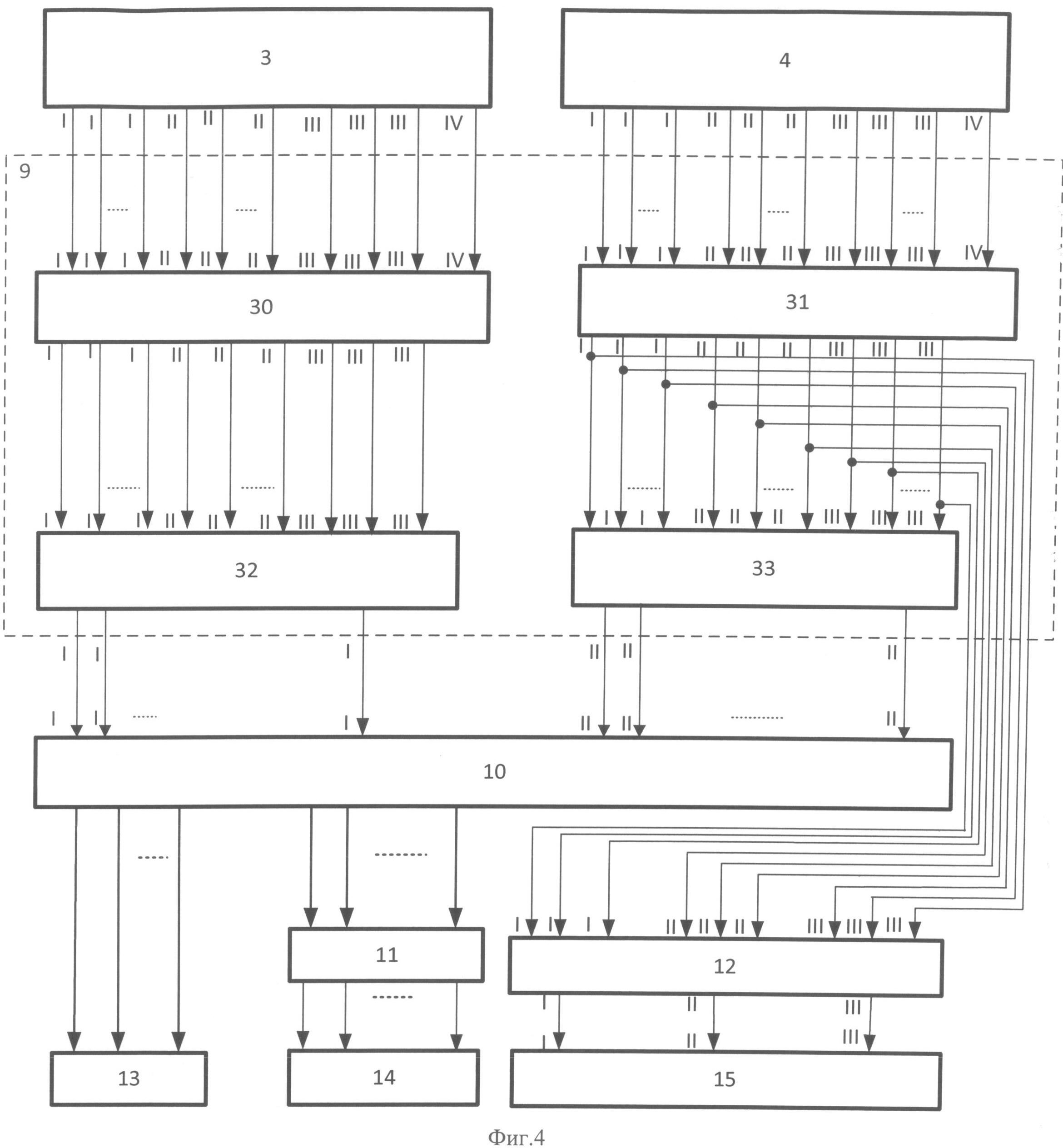
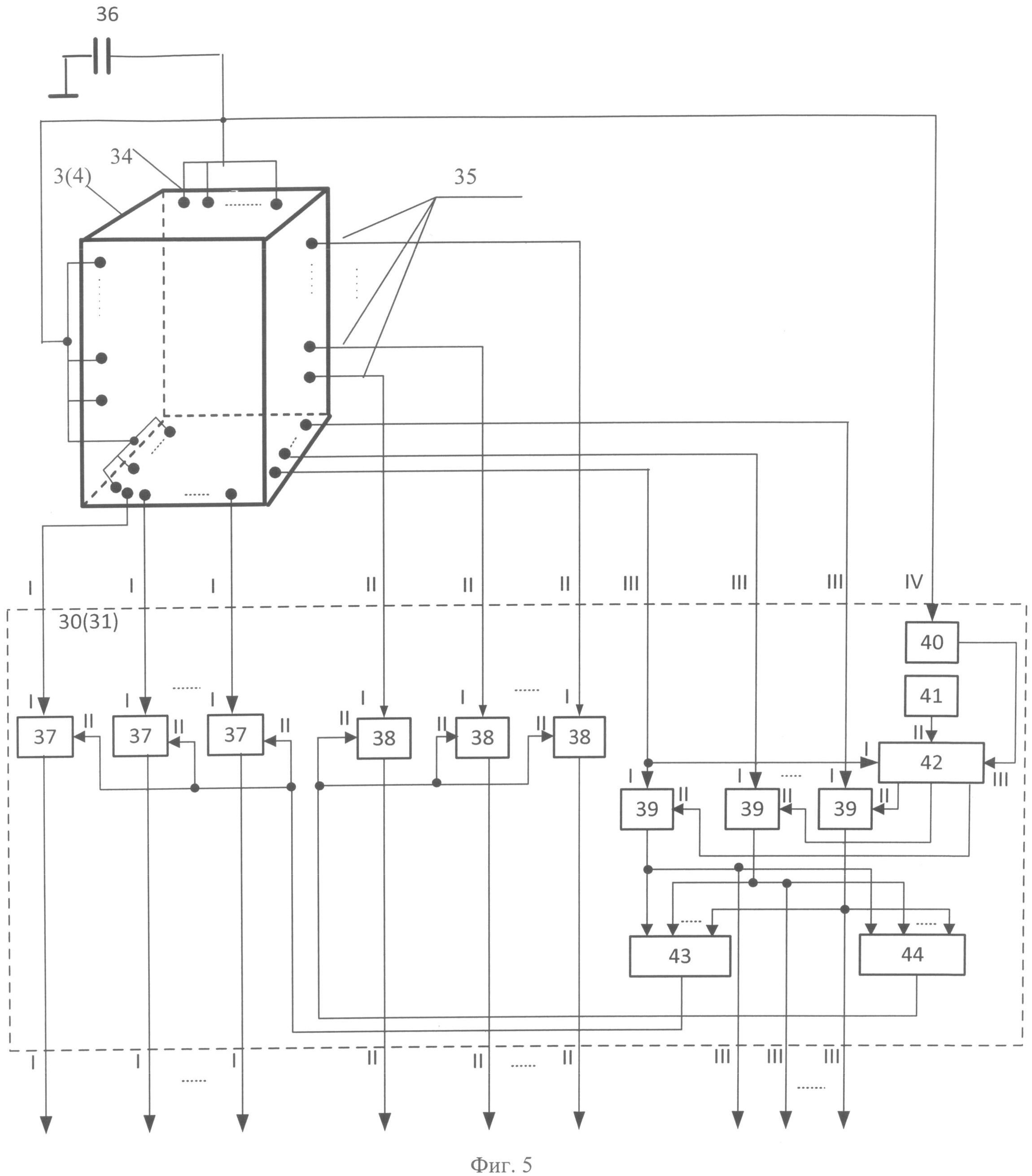
На фиг.1 приведена схема измерения параметров движения осколков снаряда, на фиг.2 приведена структурная схема первого блока измерения, на фиг.3 - блоков логики первого блока измерений, на фиг.4 - структурная схема устройства измерения параметров движения осколков, на фиг.5 - структурная схема блока регистрации параметров перемещения осколков снаряда, на фиг.6 - структурная схема блоков логики второго блока измерений, на фиг.7 - структурная схема блока определения геометрических размеров осколков снаряда.
Устройство для измерения параметров поля поражения снаряда содержит первый 1, второй 2, третий 3 и четвертый 4 датчики, которые разнесены в пространстве, мишень 5, устройство 6 для метания снаряда, устройство 7 для срабатывания взрывателя снаряда, первый 8 и второй 9 блоки измерений, вычислитель 10 определения скорости движения эшелонированных групп осколков снаряда, вычислитель 11 углов подхода эшелонированных групп осколков снаряда к мишени, блок 12 определения геометрических размеров осколков снаряда, индикатор 13 скоростей движения эшелонированных групп осколков снаряда, индикатор 14 углов подхода эшелонированных групп осколков снаряда к мишени, индикатор 15 геометрических размеров осколков снаряда, при этом первый 1 и второй 2 датчики выполнены в виде двух перпендикулярно расположенных линеек излучающих диодов 16 и линеек фотоприемников 17, третий 3 и четвертый 4 датчики выполнены в виде трех перпендикулярно расположенных линеек излучающих диодов 34, линеек фотоприемников 35 и источника 36 питания.
Первый 8 блок измерений содержит источник 18 питания, первый 19 и второй 20 измерительные приборы, первый 21, второй 22, третий 23 и четвертый 24 элементы ИЛИ, первый 25 и второй 26 блок логики.
Блоки (25, 26) логики состоят из матрицы элементов И 27, из матрицы триггеров 28, блока 29 индикации.
Второй 9 блок измерений содержит первый 30 и второй 31 блоки регистрации параметров перемещения осколков, первый 32 и второй 33 блоки логики.
Блоки (30, 31) регистрации параметров перемещения осколков снаряда состоят из первой 37, второй 38 и третьей 39 групп элементов И, дифференцирующей цепи 40, генератора 41 импульсов, сдвигового регистра 42, первого 43 и второго 44 элементов ИЛИ.
Блоки (32, 33) логики состоят из квадратной матрицы n-порядка элементов И 45, из квадратной матрицы n-порядка триггеров 46, блока 47 индикации.
Вычислитель 11 определения скорости движения эшелонированных групп осколков снаряда и вычислитель 12 углов подхода эшелонированных групп осколков снаряда к мишени могут быть выполнены, например на основе микроконтроллеров.
Блок 12 определения геометрических размеров состоят из квадратной матрицы n-ого порядка элементов И 48, квадратной матрицы n-ого порядка суммирующих устройств 49, задатчика 50 сигналов.
Описание работы устройства.
Снаряд выстреливают в направление расположение мишени.
При пролете снаряда относительно первых двух датчиков происходит их срабатывания и сигналы выдаются на входы первого блока измерений.
Первый блок измерений определяет скорость движения снаряда и координаты его движения на основе информации о временном интервале между моментами срабатывания датчиков и комбинации сработавших чувствительных элементов фотоприемников.
Это происходит следующим образом.
В момент пролета снаряда относительно первого датчика происходит срабатывания определенной комбинации чувствительных элементов 17 датчика соответствующих координатам пролета снаряда в двух плоскостях.
Сигналы с выходов датчика 1 через первые 21 и вторые 22 элементы ИЛИ поступают одновременно на запуск первого 19 и второго 20 измерительных приборов и на первые и вторые входы первого 25 блока логики (фиг.2).
В момент пролета снаряда относительно второго 2 датчика происходит срабатывания определенной комбинации чувствительных элементов 17 датчика соответствующих координатам пролета снаряда в двух плоскостях.
Сигналы с выходов датчика 2 через третий и четвертый элементы ИЛИ поступают одновременно на остановку первого и второго измерительных приборов и на первые и вторые входы второго блока логики (фиг.2).
Коды сигналов, поступающих на первые и вторые входы первого 25 блока логики, соответствуют координатам движения снаряда и обеспечивают срабатывания определенной комбинации матрицы элементов И 27, сигналы с выхода которых обеспечивают срабатывания комбинации матрицы триггеров 28, сигналы с выхода которых обеспечивают индикацию координат снаряда блоком 29 индикации (фиг.3).
Аналогично работает и второй 26 блок логики.
В момент встречи снаряда устройства 7 срабатывания взрывателя снаряда, происходит подрыв снаряда.
Устройство 7 срабатывания взрывателя снаряда может быть выполнено, например, в виде листа фанеры толщиной 10 мм.
При этом корпус снаряда дробится на большое число осколков различного веса. Под воздействием газообразных продуктов детонации осколки получают большую начальную скорость, достигающую 500-1500 м/с, и разлетаются по определенным направлениям от точки взрыва. В зависимости от скорости и массы осколков формируются эшелонированные группы осколков снаряда.
С момента подрыва снаряда на траектории движения начинается этап определения характеристик поля поражения снаряда (фиг.1, 4).
На данном этапе определяют количество эшелонированных групп осколков снаряда, скорость их движения, геометрические размеры осколков снаряда, углы подхода эшелонированных групп осколков снаряда к мишени.
В момент пролета эшелонированных групп осколков снаряда относительно третьего 3 датчика происходит последовательное срабатывание комбинации чувствительных элементов 35 датчика и сигналы с выходов третьего 3 датчика поступают на первые, вторые, третьи и четвертый входы первого 30 блока регистрации параметров перемещений осколков.
Сигналы с третьих выходов третьего 3 датчика последовательно поступают на первые входы соответствующих элементов И из n-третьей 39 группы элементов И и на первый вход сдвигового регистра 42, обеспечивая тем самым последовательное поступление импульсов с выходов сдвигового регистра 26 через первый 43 и второй 44 элемент ИЛИ, на вторые входы n-первых 37 и n-вторых 38 групп элементов И, с выходов которых поступают на входы первого 32 логики, определяя тем самым координаты пролета групп эшелонирования осколков снаряда (фиг 5).
В момент пролета эшелонированных групп осколков снаряда относительно четвертого 4 датчика происходит последовательное срабатывание комбинации чувствительных элементов 35 датчика и сигналы с выходов четвертого 4 датчика поступают на первые, вторые, третьи и четвертый входы второго 31 блока регистрации параметров перемещений осколков снаряда.
Второй 31 блок регистрации параметров перемещения осколков снаряда работает аналогично, как и первый блок регистрации параметров перемещения осколков снаряда.
Коды сигналов, поступающих на первые и вторые входы блока 32 логики, соответствуют координатам движения эшелонированных групп осколков и обеспечивают срабатывания определенной комбинации квадратной матрицы элементов И 45, сигналы с выхода которых обеспечивают срабатывания комбинации квадратной матрицы триггеров 46, сигналы с выхода которых обеспечивают индикацию координат эшелонированных групп осколков блоком 47 индикации (фиг.6).
Аналогично работает и второй 33 блок логики входящий в состав второго 9 измерительного блока.
Информация о координатах эшелонов осколков поступает с первого 32 и второго 33 блоков логики на первые и вторые входы вычислителя 10 определения скорости движения эшелонов осколков, который определяет скорость в соответствии с выражением выражения  , где dni - расстояние между эшелонами осколков относительно первого и второго датчиков
, где dni - расстояние между эшелонами осколков относительно первого и второго датчиков  , Δt - время, которое определяет дискретность измерения скоростей осколков снаряда (фиг.4).
, Δt - время, которое определяет дискретность измерения скоростей осколков снаряда (фиг.4).
Кроме того, информация о координатах пролета эшелонов осколков поступает с выхода вычислителя 10 определения скорости движения эшелонированных групп осколков на вход вычислителя 11 углов подхода эшелонированных групп осколков снаряда к мишени, в котором определяют координаты Xi, Yi, Zi векторов скоростей ϑni эшелонов осколков снаряда в виде выражения Xi=x1i-x2i, Yi=y1i-y2i, Zi=z1i-z2i и определяют углы подхода групп эшелонированных групп осколков снаряда к мишени в виде выражений:  ,
,  (фиг.4).
(фиг.4).
Информация с выходов вычислителя 10 определения скоростей движения эшелонированных групп осколков снаряда, вычислителя 11 определения углов подхода эшелонированных групп осколков снаряда к мишени поступает соответственно на индикатор 13 скоростей движения эшелонированных групп осколков снаряда и индикатор 14 углов подхода эшелонированных групп осколков снаряда к мишени 5 (фиг.4).
Блок 12 определения геометрических размеров осколков снаряда, на основе совокупности одновременно сработавших чувствительных элементов 35 фотоприемников определяет геометрические размеры осколков.
При этом с первой, второй и третьей группы блока 31 регистрации параметров перемещения осколков сигналы через первую, вторую и третью группу входов блока 12 определения геометрических размеров метаемого тела поступают соответственно на первые входы первого, второго и третьего столбца квадратной матрицы n-ого порядка элементов И 48, на вторые входы которых поступают сигналы с выходов задатчика 50 сигналов.
С выходов столбцов квадратной матрицы n-ого порядка элементов И48, сигналы поступают на входы квадратной матрицы n-ого порядка суммирующих устройств 49, с выходов которых сигналы соответствующие геометрическим размерам осколков снаряда поступают на вход индикатора 15 геометрических размеров осколков снаряда (фиг.7).
Таким образом, предлагаемое изобретение обеспечивает определение характеристик поля поражения снаряда.


Способ определения характеристик осколочного поля боеприпаса и устройство для его осуществления
Способ автоматизированной оценки эффективности поражающего действия боеприпаса дистанционного действия и устройство для его осуществления
Способ определения характеристик осколочного поля боеприпасов и устройство для его осуществления
Способ определения характеристик осколочного поля боеприпаса и устройство для его осуществления
Способ определения зажигательной способности боеприпаса дистанционного действия и устройство для его осуществления
Способ определения пробивного действия осколков боеприпасов и устройство для его осуществления
Способ испытания боеприпасов на гидроудар
Способ оздоровления хозяйств от некробактериоза крупного рогатого скота
Бортовая информационная система беспилотного транспортного средства
Препарат для лечения некробактериоза крупного рогатого скота
Способ согласования комплексных сопротивлений и устройство его реализации
Устройство для реализации пространственно-временной обработки изображений на основе матриц фоточувствительных приборов с зарядовой связью
Устройство для транспортирования самолетов
Способ эвакуации самолетов
Компрессор поршневой для взрывоопасных газов
Способ двухуровневого управления и система для его осуществления (варианты)
Способ моделирования процессов централизованного управления техническими средствами и система для его осуществления (варианты)
Способ моделирования процессов управления техническими средствами и система моделирования для его осуществления
Способ выработки решений проблем развития автоматизированной системы управления и система для его осуществления
Способ согласования комплексных сопротивлений и устройство его реализации

