Результат интеллектуальной деятельности: МОБИЛЬНОЕ РОБОТИЗИРОВАННОЕ УСТРОЙСТВО, ИМЕЮЩЕЕ ДАТЧИК СТОЛКНОВЕНИЙ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к мобильному роботизированному устройству, содержащему, по меньшей мере, один смещаемый элемент датчика для обнаружения столкновения между мобильным устройством и неподвижным объектом, при этом элемент датчика располагается подпружиненным образом так, чтобы в нормальном состоянии быть в вытянутом положении, и при этом присутствуют средства для обнаружения смещения элемента датчика относительно мобильного устройства, при этом упомянутые средства содержат первое средство обнаружения для обнаружения предварительно определенного первого смещения элемента датчика и второе средство обнаружения для обнаружения предварительно определенного большего смещения элемента датчика.
Предшествующий уровень техники
Такое мобильное роботизированное устройство раскрыто в KR-B-100835968, при этом предварительно опубликованный документ соответствует публикации WO-A-2008/105634. В публикации описывается роботизированный пылесос, имеющий смещаемый элемент датчика, содержащий два бампера на своей передней стороне в основном направлении движения. Первый бампер расположен в более высокой части передней стороны устройства, а второй бампер расположен в более низкой части. Таким образом, первый бампер обнаруживает объекты, которые следует избегать, а второй бампер обнаруживает объекты, через которые можно переехать. Второй бампер может поворачиваться вниз вокруг горизонтальной оси, так что устройство поднимается для того, чтобы переехать через преодолимый объект. Первый бампер может быть размещен, чтобы выступать вперед по сравнению со вторым бампером, так что препятствие, которое необходимо избегать, сначала соприкасается с первым бампером, а затем со вторым бампером. Следовательно, прежде, чем задействуется второй бампер, препятствие, которое необходимо избегать, определяется.
Другой вид тактильного бампера автономного мобильного робота или платформы описывается в US4596412. Тактильный бампер содержит множество смещаемых элементов датчиков, являющихся свободно плавающими лентами, заключенными в корпус. Средствами для обнаружения смещения элементов датчиков являются множество микропереключателей, прикрепленных к корпусу и размещенных за элементами датчиков.
Например, мобильное роботизированное устройство является пылесосом для автономной очистки комнаты, когда мобильное устройство движется по полу комнаты. Таким образом, маршрут пылесоса может управляться на основе наблюдения его окружения камерами или другими средствами наблюдения, такими как сонары или инфракрасные датчики. Кроме того, элементы датчиков присутствуют на одной или более сторонах мобильного устройства для того, чтобы обнаруживать физический контакт между мобильным устройством и неподвижными объектами (препятствиями) на полу комнаты. Пылесос может содержать два модуля, основной модуль, содержащий всасывающий вентилятор, и отделение для сбора мусора, и модуль чистящей головки, соединенный с основным модулем шлангом, через этот шланг мусор передается из модуля чистящей головки в основной модуль. Кроме того, шланг содержит токопроводящие провода для подачи электрической энергии из основного модуля в модуль чистящей головки и для обмена электронной информацией между двумя модулями. Такой пылесос раскрыт в US-2002/0174506. Таким образом, модуль чистящей головки может быть мобильным устройством, содержащим один или более элементов датчиков для обнаружения физического контакта между модулем и неподвижными объектами на полу комнаты, которая должна быть очищена.
В общем мобильное роботизированное устройство должно определять свой маршрут движения между неподвижными объектами в своем окружении. Когда мобильное устройство касается неподвижного объекта, направление движения должно быть изменено, так что можно избежать неподвижного объекта. Следовательно, контакт с таким неподвижным объектом обнаруживается для того, чтобы продолжать движение мобильного устройства в другом направлении, например, в противоположном направлении, от неподвижного объекта. Однако, мобильное устройство может попасться в ловушку между неподвижными объектами при движении. Для того, чтобы освободиться из такого пойманного положения, мобильное устройство будет выполнять движения, такие как смещения вперед и назад и/или поворот вокруг вертикальной оси, но пространство для маневрирования может быть небольшим.
Сущность изобретения
Задачей изобретения является обеспечение мобильного роботизированного устройства, в котором присутствуют средства для обнаружения смещения элемента датчика относительно мобильного устройства и в котором упомянутые средства содержат первое средство обнаружения для обнаружения предварительно определенного смещения элемента датчика и второе средство обнаружения для обнаружения предварительно определенного большего смещения элемента датчика, при этом может быть достигнута компактная и относительно простая структура.
Для решения этой задачи элемент датчика прикрепляется к раме, при этом элемент датчика может смещаться относительно рамы, выполняя первое смещение, обнаруживаемое первым средством обнаружения, при этом элемент датчика вместе с рамой может смещаться относительно мобильного устройства для получения большего смещения элемента датчика, обнаруживаемого вторым средством обнаружения, причем это второе средство обнаружения обнаруживает предварительно определенное смещение рамы. Таким образом, нагрузка пружины между мобильным устройством и рамой выше, чем нагрузка пружины между рамой и элементом датчика. Используя такую промежуточную раму, может быть получена компактная и относительно простая структура, в особенности, когда устройство относительно небольшое, например, в случае, когда оно является модулем чистящей головки пылесоса.
Во время обычного движения мобильного устройства управление перемещением мобильного устройства основывается на сигналах от первого средства обнаружения. Однако, в случае, когда мобильное устройство находится в положении, в котором видно, что ему трудно освободиться из этого положения, например, при маневрировании неоднократно вперед и назад, тогда второе средство обнаружения становится активным и доминирует над первом средством обнаружения, при этом мобильное устройство имеет большую свободу перемещения для того, чтобы освободиться из пойманного положения.
В предпочтительном варианте осуществления элемент датчика является смещаемым бампером со стороны мобильного устройства, предпочтительно с передней стороны и/или с задней стороны мобильного устройства. Таким образом, бампер может формировать сигнал обнаружения, как только мобильное устройство касается неподвижного объекта, также может поглощать удар во время столкновения между мобильным устройством и этим объектом. Мобильное устройство может нести два или более бамперов на разных сторонах мобильного устройства, при этом каждый бампер функционирует как элемент датчика.
Мобильное роботизированное устройство, имеющее смещаемый бампер, задающий внешний периметр устройства, раскрыто в EP-1582957. Бампер плавает на пружинах над основной рамой устройства. Контакт с препятствием вызывает перемещение бампера относительно основной рамы, причем это перемещение обнаруживается посредством переключателя-джойстика.
Предпочтительно, мобильное роботизированное устройство имеет основное направление движения, при этом два элемента датчика присутствуют на противоположных сторонах мобильного устройства, являясь элементом переднего датчика и элементом заднего датчика, при этом упомянутый элемент переднего датчика выступает в основном направлении движения. Когда мобильное устройство попадает в ловушку между двумя неподвижными объектами, один спереди мобильного устройства, а другой с его задней стороны, тогда свобода маневрирования может быть увеличена посредством использования второго средства обнаружения вместо первого средства обнаружения. Таким образом, мобильное устройство может двигаться вперед и назад на бóльшую дистанцию, так что оно имеет больше пространства, чтобы поворачиваться вокруг своей вертикальной оси для того, чтобы освободиться из своего пойманного положения.
Рама может нести более чем один элемент датчика, при этом первое средство обнаружения обнаруживает предварительно определенное смещение каждого из элементов датчиков, а второе средство обнаружения обнаруживает предварительно определенное смещение рамы. В предпочтительном варианте осуществления рама несет два элемента датчика на противоположных сторонах мобильного устройства, предпочтительно с передней стороны и с задней стороны в основном направлении движения мобильного устройства, так что мобильное устройство имеет повышенную свободу в маневрировании вперед и назад во время высвобождения из пойманного положения. Конечно, рама может нести более чем два элемента датчика, например, с каждой стороны устройства.
Предпочтительно, средство обнаружения содержит микропереключатели, причем эти микропереключатели могут быть активированы посредством смещения элемента датчика. Микропереключатели являются простыми и относительно небольшими устройствами, которые могут предоставлять электрический сигнал, когда элемент датчика совершает предварительно определенное смещение.
В предпочтительном варианте осуществления мобильное устройство является пылесосом, содержащим основной модуль и мобильный модуль чистящей головки, соединенный шлангом с основным модулем, например, как описано в US2002/0174506, при этом модуль чистящей головки содержит упомянутый смещаемый элемент датчика.
Изобретение также относится к способу управления мобильным роботизированным устройством, содержащим, по меньшей мере, один смещаемый элемент датчика, обнаруживающий столкновения между мобильным устройством и неподвижными объектами, при этом элемент датчика подпружинен и нормально находится в растянутом положении, и посредством чего детектируется смещение элемента датчика относительно мобильного устройства, при этом первое средство обнаружения обнаруживает предварительно определенное первое смещение элемента датчика, второе средство обнаружения обнаруживает предварительно определенное бóльшее смещение элемента датчика, элемент датчика прикреплен к раме, элемент датчика смещается относительно рамы, осуществляя первое смещение, обнаруживаемое первым средством обнаружения, и элемент датчика вместе с рамой смещается относительно мобильного устройства для получения большего смещения элемента датчика, обнаруживаемого вторым средством обнаружения.
Краткое описание чертежей
Изобретение теперь будет дополнительно пояснено посредством описания варианта осуществления модуля чистящей головки мобильного роботизированного пылесоса, содержащего два смещаемых элемента датчика, прикрепленных к смещаемой раме, со ссылками на чертежи, на которых:
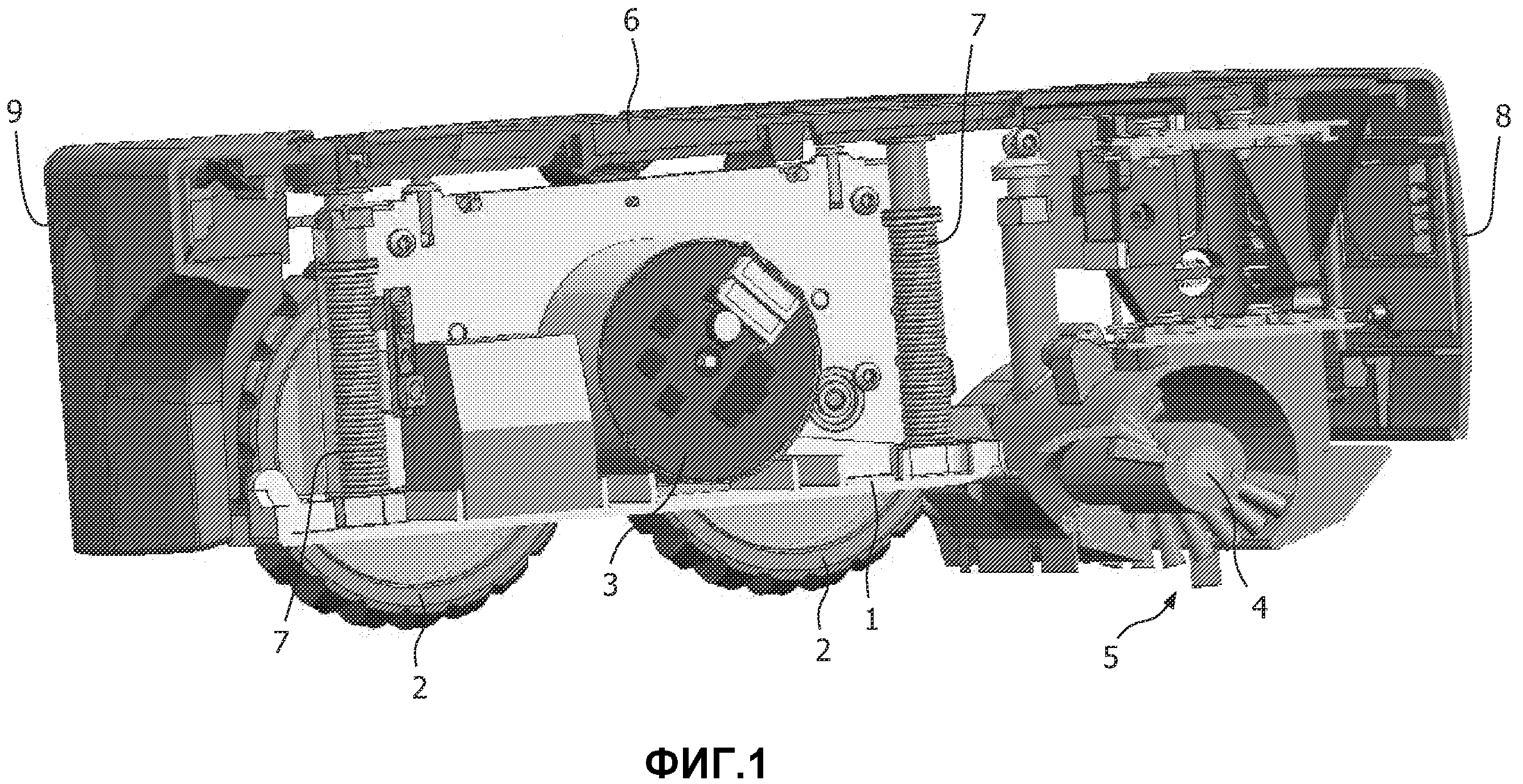
Фиг.1 изображает общий вид поперечного сечения модуля чистящей головки; и
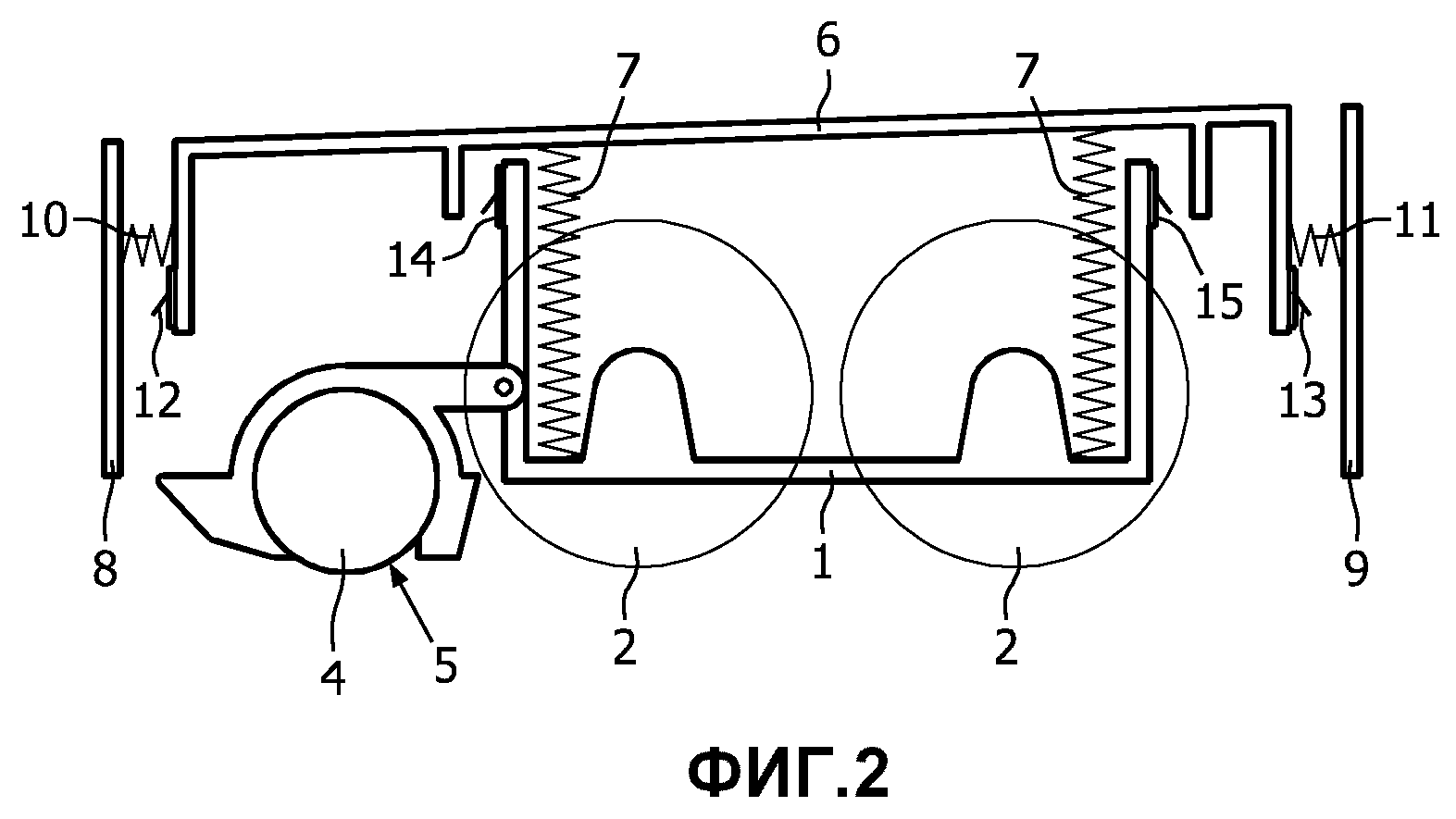
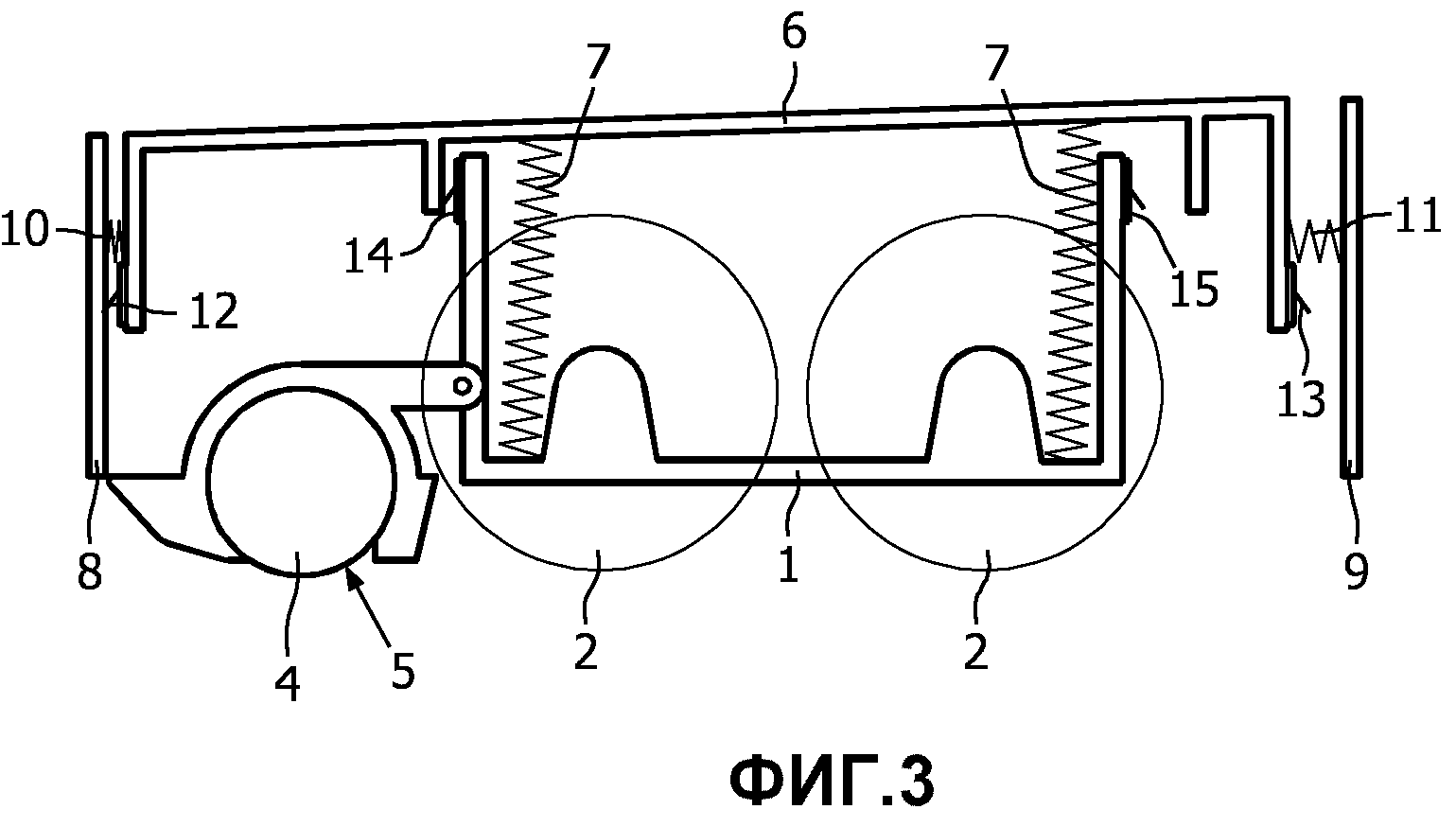
Фиг.2 и фиг.3 изображают схематические виды в разрезе модуля.
В частности, фиг.2 и 3 являются схематическими представлениями, показывающими только части, которые участвуют в пояснении описанного варианта осуществления.
Подробное описание варианта осуществления изобретения
На чертежах показан модуль чистящей головки, имеющий базовую часть 1, формирующую главную часть нижней стороны модуля. Базовая часть 1 несет четыре колеса, при этом только два колеса 2 представлены на видах в разрезе. Два колеса 2 приводятся в движение электродвигателем 3 (фиг.1), а два других колеса (не показаны) приводятся в движение другим электродвигателем (не показан). Отдельно управляя скоростью вращения двух пар колес 2, можно управлять движением модуля по полу. Таким образом модуль может перемещаться вперед и назад и может поворачиваться вокруг вертикальной оси за счет приведения в движение пары колес 2 с различными скоростями вращения, во время своего перемещения, а также в неподвижном положении модуля.
Модуль чистящей головки имеет вращающуюся щетку 4 во входном патрубке 5 для всасывания, проходящем в обратном направлении относительно основного направления движения модуля, на чертежах в правом направлении и в левом направлении. Во время работы отверстие входного патрубка 5 для всасывания на нижней стороне модуля располагается близко к полу, в то время как вращающаяся щетка 4 касается пола, так что мусор будет удаляться с пола и будет всасываться через входной патрубок 5 для всасывания и передаваться в шланг (не показан), соединенный с модулем чистящей головки. Другой конец шланга соединяется с основным модулем пылесоса (не показан), содержащим всасывающий вентилятор и отделение для сбора мусора.
Верхняя стенка модуля является частью рамы 6, причем эта рама 6 частично окружает модуль. Рама 6 прикрепляется к базовой части 1 посредством четырех цилиндрических пружин 7 (две пружины 7 показаны), так что рама 6 может двигаться в горизонтальном направлении. Пружины 7 являются относительно жесткими, так что относительно большое усилие требуется, чтобы сместить раму 6 относительно базовой части 1. На передней стороне модуля (на фиг.1 правая сторона, а на фиг.2 и 3 - левая сторона) рама 6 несет бампер 8, так же рама несет бампер 9 на задней стороне модуля. Два бампера 8, 9 прикрепляются к раме 6 посредством цилиндрических пружин 10, 11 (представленных на фиг.2 и 3), так что каждый бампер 8, 9 может смещаться из своего вытянутого положения (показанного на фиг.2) по направлению к раме 6 против толкающего усилия пружин 10, 11. Таким образом, каждый бампер 8, 9 будет касаться микропереключателя 12, 13, причем этот микропереключатель 12, 13 обнаруживает смещение бампера 8, 9.
Когда модуль чистящей головки движется вперед (на фиг.2 и 3 - влево), модуль может сталкиваться с неподвижным объектом, при этом бампер 8 на передней стороне модуля толкается по направлению к раме 6 (как показано на фиг.3). Таким образом, микропереключатель 12 активируется, при этом формируется сигнал, сообщающий о столкновении с неподвижным объектом, так что перемещение модуля чистящей головки будет остановлено немедленно и будет продолжено в противоположном направлении от неподвижного объекта. Может быть так, что модуль затем ударяется о другой неподвижный объект, например, когда модуль не двигался по прямой траектории, или когда другой неподвижный объект не присутствовал ранее. Таким образом, бампер 9 на задней стороне модуля толкается по направлению к раме 6, так что микропереключатель 13 обнаруживает столкновение с упомянутым другим неподвижным объектом. Для того, чтобы найти путь из такого пойманного положения, модуль может пытаться повернуться вокруг вертикальной оси, в то же время, двигаясь вперед и назад. Когда пространство между двумя неподвижными объектами относительно мало, маневр может быть затруднительным для модуля. Для того, чтобы увеличить свободу маневрирования, обнаружение посредством микропереключателей 12, 13 деактивируется, и обнаружение контакта с неподвижными объектами выполняется микропереключателями 14, 15, причем эти микропереключатели 14, 15 активируются, когда рама 6 движется относительно базовой части 1 модуля. Поскольку обнаружение посредством микропереключателей 14, 15 имеет место при большем смещении бамперов 8, 9 относительно базовой части 1, модуль может перемещаться ближе к двум неподвижным объектам, получая в результате большую свободу маневрирования модуля.
Фиг.3 изображает ситуацию, в которой микропереключатели 12, 13 деактивируются, т.е. находятся в нерабочем состоянии, и при этом столкновение с неподвижными объектами обнаруживается посредством микропереключателей 14, 15. На фиг.3 модуль ударяется о неподвижный объект при движении в прямом направлении. Таким образом, микропереключатель 14 активируется, поскольку рама 6 перемещается против усилия пружин 7. Усилие для перемещения рамы 6 относительно базовой части 1 больше, чем усилие, сформированное пружинами 10, 11, так что рама 6 движется только относительно базовой части 1, когда одна из пружин 10, 11 толкается внутрь.
В итоге, мобильное роботизированное устройство содержит, по меньшей мере, один смещаемый элемент 8, 9 датчика для обнаружения столкновения между мобильным устройством и неподвижным объектом. Первые средства 12, 13 обнаружения присутствуют для обнаружения предварительно определенного первого смещения элемента 8, 9 датчика, а вторые средства 14, 15 обнаружения присутствуют для обнаружения предварительно определенного бóльшего смещения элемента 8, 9 датчика.
Описанный вариант осуществления изобретения является только примером, множество других вариантов осуществления возможно в рамках объема притязаний изобретения.
Робот-пылесос, содержащий сенсорную ручку
Способ и система для кодирования сигнала трехмерного видео, инкапсулированный сигнал трехмерного видео, способ и система для декодера сигнала трехмерного видео
Осветительное устройство с отражающим электроактивным полимерным приводом
Сид на фотонных кристаллах
Устройство и способ ввода выбора цвета
Подставка с двойной опорной поверхностью для чашек и других емкостей в машинах для приготовления напитков
Узел рукоятки для всасывающего узла
Визуализация васкуляризации
Способ коррекции движения для выравнивания динамического объема без временных ограничений
Устройство стыковки головки щетки и ручки для электрической зубной щетки
Микроэлектронное сенсорное устройство сенсора для детектирования целевых частиц

