Результат интеллектуальной деятельности: СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ
Вид РИД
Изобретение
Изобретение относится к области динамической балансировки роторов, а именно к контролю параметров массо-инерционной асимметрии роторов и обеспечению соответствия этих параметров предельно допустимым значениям, путем изменения дисбаланса в одной плоскости коррекции.
При компоновке скоростного транспортного средства, выполненного в виде осесимметричного ротора (цилиндра, конуса, усеченного конуса), часто возникает необходимость не только точно знать массу, положение центра масс и моменты инерции ротора, но и обеспечить после его изготовления и сборки заданные в эксплуатационной документации значения параметров массо-инерционной асимметрии, к которым относятся величина поперечного смещения центра масс и угол отклонения продольной главной центральной оси инерции (ГЦОИ) относительно геометрической оси ротора. При этом стремятся в первую очередь минимизировать поперечное смещение центра масс, поскольку его величина существенно влияет на устойчивость движения транспортного средства вокруг центра масс.
Невысокая точность теоретического расчета, неизбежный технологический разброс в определенных пределах характеристик элементов конструкции, компонуемых внутри ротора (масс, моментов инерции, координат установки элементов и грузов, что обусловлено влиянием случайных отклонений указанных характеристик от их расчетных значений), приводит к появлению асимметрии в распределении масс ротора, характеризующейся перекосом продольной ГЦОИ и поперечным смещением центра масс относительно геометрической оси ротора. Это требует применения экспериментальных или расчетно-экспериментальных методов определения указанных параметров массо-инерционной асимметрии с целью их последующего приведения с высокой точностью к заданным нормативам путем корректировки массы ротора. Такая задача возникает при компоновке сухопутных, морских, воздушных, космических транспортных средств, силовая установка которых представляет собой сложный ротор, имеющий в своем составе рамы, отсеки, датчиковую аппаратуру, исполнительные механизмы. Решением задачи определения и приведения с высокой точностью к заданным нормативам параметров массо-инерционной асимметрии является использование динамических балансировочных стендов, обладающих высокой инструментальной точностью, что обеспечивает значительное повышение точности определения указанных параметров по сравнению как с теоретическим расчетом, так и с известными из технической литературы экспериментальными методами с использованием устройств, реализующих, например, методы статической балансировки, физического маятника или крутильных колебаний.
Как правило, в процессе балансировки ротора в одной плоскости коррекции невозможно полностью устранить главный вектор и главный момент дисбалансов, совместив продольную ГЦОИ ротора с его геометрической осью, поэтому задачей балансировщиков является достижение минимальных и не превышающих заданных предельно допустимых значений поперечного смещения центра масс и угла отклонения продольной ГЦОИ от геометрической оси ротора.
Если в ходе балансировочного эксперимента выявляется, что задача приведения одновременно двух указанных параметров массо-инерционной асимметрии контролируемого ротора к значениям, не превышающим заданных предельно допустимых значений нагружением массой в одной плоскости коррекции, невыполнима, ротор бракуют и направляют на перекомпоновку.
Известен способ одноплоскостной балансировки ротора [Основы балансировочной техники. Т.1 // Под ред. проф. В.А.Щепетильникова. - М.: Машиностроение, 1975. С.184-186], заключающийся в том, что в опоры балансировочного стенда устанавливают ротор, имеющий плоскость коррекции, приводят ротор во вращение, сначала измеряют амплитуды и фазы вибраций опоры, вызванные начальными дисбалансами ротора, затем измеряют амплитуды и фазы вибраций опоры после прикрепления к плоскости коррекции пробного груза, по результатам этих измерений рассчитывают массу и угол установки в плоскости коррекции балансировочного груза.
В процессе балансировки амплитуды и фазы вибраций измеряют для ближайшей к плоскости коррекции опоры. По полученным результатам определяют относительное изменение амплитуды вибрации при вращении ротора с пробным грузом и угол сдвига фазы вибрации, а по этим двум величинам находят коэффициент отношения балансировочного груза к пробному, а также угол, на который следует переместить балансировочный груз от места установки пробного груза. Через коэффициент отношения и массу пробного груза находят массу балансировочного груза, а по значениям углового положения пробного груза и угла сдвига фазы находят угол установки балансировочного груза.
Одновременное измерение амплитуд и фаз вибраций опоры позволяет значительно сократить время балансировки одной плоскости коррекции ротора, исключая аналитическим путем или с использованием векторных построений погрешности измерений указанных параметров.
При уравновешивании одной плоскости коррекции ротора способ позволяет выполнить либо статическую балансировку с устранением или уменьшением поперечного смещения центра масс с геометрической оси ротора, либо моментную балансировку с устранением или уменьшением угла отклонения продольной ГЦОИ ротора, однако он не обеспечивает одновременное приведение параметров массо-инерционной асимметрии ротора к значениям, не превышающим предельно допустимых значений.
Известен способ одноплоскостной балансировки роторов, дисбалансы которых сосредоточены в одной плоскости [Левит М.Е., Рыженков В.М. Балансировка деталей и узлов. - М.: Машиностроение, 1986. С.71-76]. Способ заключается в том, что в опоры балансировочного стенда устанавливают ротор, имеющий плоскость коррекции, приводят ротор во вращение, сначала измеряют амплитуды и фазы вибраций опоры, вызванные начальными дисбалансами ротора, затем измеряют амплитуды и фазы вибраций опоры после прикрепления к плоскости коррекции пробного груза, по результатам этих измерений рассчитывают массу и угол установки в плоскости коррекции балансировочного груза.
По значениям амплитуды и фазы вибрации одной из опор находят начальное значение и угловое положение вектора дисбаланса в плоскости коррекции, рассчитывают массу и угол установки балансировочного груза, прикрепление которого к плоскости коррекции обеспечивает устранение действия начального дисбаланса в этой плоскости и, тем самым - устранение смещения центра масс ротора.
Недостатком известного способа является то, что при его использовании не решается задача определения главного момента дисбалансов и, следовательно, угла отклонения продольной ГЦОИ от геометрической оси ротора, в связи с чем отсутствует возможность обеспечения заданного значения данного параметра массо-инерционной асимметрии ротора. Способ применим только к роторам, имеющим форму плоского диска, плоскость коррекции которого находится на незначительном расстоянии от центра масс.
Известен способ балансировки ротора в двух плоскостях [Левит М.Е., Рыженков В.М. Балансировка деталей и узлов. - М.: Машиностроение, 1986. С.76-77]. Способ заключается в том, что в опоры балансировочного стенда устанавливают ротор, имеющий расположенные на торцах две плоскости коррекции и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, затем определяют значения и углы векторов начальных дисбалансов в каждой плоскости коррекции.
По значениям и угловым положениям векторов начальных дисбалансов рассчитывают массы и угловые положения балансировочных грузов для каждой плоскости коррекции, установка которых в соответствующей плоскости коррекции обеспечит устранение начального дисбаланса.
В результате устранения действия начальных дисбалансов в обеих плоскостях коррекции известный способ обеспечивает совмещение геометрической оси и продольной ГЦОИ ротора, полностью устраняя поперечное смещения центра масс и угол отклонения продольной ГЦОИ относительно геометрической оси ротора.
Однако он требует не только временной установки пробных грузов, но и постоянной установки балансировочных грузов в двух плоскостях коррекции, что не всегда возможно.
Известен способ балансировки ротора в одной плоскости коррекции [Журнал: «Приборы и системы. Управление, Контроль, Диагностика», авторы: Ключников А.В., Сидоров А.В., статья: «Применение метода низкочастотной динамической балансировки для прецизионного контроля параметров массо-инерционной асимметрии роторных объектов». - М.: Научтехлитиздат, 2011, №3. С.48-53]. Данный способ принят за прототип как наиболее близкий по технической сущности к заявляемому способу и имеет наибольшее количество общих существенных признаков с заявляемым способом.
Известный способ заключается в том, что в опоры балансировочного стенда устанавливают ротор, с заданными предельно допустимыми значениями поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, при вращении сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, после чего по полученным результатам рассчитывают коэффициенты балансировочной чувствительности стенда и коэффициенты взаимовлияния плоскостей коррекции, затем определяют значения и углы векторов начальных дисбалансов в каждой плоскости коррекции, находят начальные значения поперечного смещения центра масс относительно геометрической оси ротора и угла отклонения продольной ГЦОИ относительно геометрической оси ротора (параметров массо-инерционной асимметрии), при превышении хотя бы одним из них, заданного предельно допустимого значения, создают балансировочный дисбаланс в балансировочной плоскости коррекции, предварительно произведя расчет его значения и углового положения, после чего определяют остаточные значения параметров массо-инерционной асимметрии, а затем судят о балансировке ротора путем сопоставления остаточных и предельно допустимых значений параметров массо-инерционной асимметрии.
После расчета значения и углового положения балансировочного дисбаланса, по известным законам статики производят расчет массы и угла установки балансировочного груза (грузов), обеспечивающего создание балансировочного дисбаланса. Затем устанавливают балансировочный груз в балансировочной плоскости коррекции ротора и повторно контролируют значения параметров остаточной массо-инерционной асимметрии. Повторный контроль параметров заключается в том, что ротор приводят во вращение, измеряют амплитуды и фазы вибраций обеих опор и с использованием ранее определенных коэффициентов балансировочной чувствительности стенда и коэффициентов взаимовлияния плоскостей коррекции рассчитывают значения остаточных дисбалансов, действующих в обеих плоскостях коррекции, по которым определяют значения остаточных параметров массо-инерционной асимметрии.
Способ позволяет обеспечить достижение предельно допустимых значений параметров асимметрии путем установки балансировочного груза (грузов) в одной плоскости коррекции ротора. Способ применим в случае использования дополнительной технологической оснастки для балансировки ротора.
Недостатком известного способа является то, что он не обеспечивает одновременное приведение значений обоих параметров массо-инерционной асимметрии ротора к значениям, не превышающим его предельно допустимых значений, что приводит к увеличению длительности и трудоемкости балансировочного эксперимента, за счет необходимости повторения операций по расчету и установке балансировочных грузов, с последующим контролем остаточных параметров массо-инерционной асимметрии. Необходимость многократного расчета и установки балансировочных грузов и экспериментального контроля параметров остаточной массо-инерционной асимметрии делает способ неудобным для использования в серийном производстве роторов.
Задачей предлагаемого изобретения является приведение значений обоих параметров массо-инерционной асимметрии роторов к значениям, не превышающим заданных предельно допустимых значений, и уменьшение длительности и трудоемкости процесса балансировки.
Техническим результатом изобретения является возможность оптимизации параметров массо-инерционной асимметрии в пределах их допустимых значений, менее трудоемкий контроль остаточных значений массо-инерционной асимметрии за счет сокращения количества балансировочных операций и точность прогнозирования остаточных значений параметров массо-инерционной асимметрии.
Технический результат достигается тем, что в способе балансировки ротора в одной плоскости коррекции в опоры балансировочного стенда устанавливают ротор, с заданными предельно допустимыми значениями параметров массо-инерционной асимметрии - поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно его геометрической оси, имеющий расположенные на торцах две плоскости коррекции, одна из которых - балансировочная, а другая - пробная, и обладающий известными массой, расстояниями от центра масс до плоскостей коррекции, значениями моментов инерции, приводят ротор во вращение, при вращении сначала измеряют амплитуды и фазы вибраций обеих опор, вызванных начальными дисбалансами ротора, затем, поочередно прикрепляя к каждой из плоскостей коррекции пробные грузы, снова измеряют амплитуды и фазы вибраций обеих опор, после чего по полученным результатам рассчитывают коэффициенты балансировочной чувствительности стенда и коэффициенты взаимовлияния плоскостей коррекции, определяют значения и углы векторов начальных дисбалансов в каждой плоскости коррекции, находят начальные значения параметров массо-инерционной асимметрии - поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси ротора, при превышении хотя бы одним из них, заданного предельно допустимого значения, создают балансировочный дисбаланс в балансировочной плоскости коррекции, предварительно произведя расчет его значения и углового положения, после чего определяют остаточные значения параметров массо-инерционной асимметрии, а затем судят о балансировке ротора путем сопоставления остаточных и заданных предельно допустимых значений параметров массо-инерционной асимметрии, согласно изобретению, при создании балансировочного дисбаланса сначала моделируют появление дисбаланса в балансировочной плоскости коррекции, обеспечивающего исключение начального дисбаланса в этой плоскости коррекции, затем с учетом коэффициента взаимовлияния плоскостей коррекции моделируют появление дисбаланса в балансировочной плоскости коррекции, обеспечивающего приведение значений поперечного смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси ротора к значениям, не превышающим соответствующих заданных предельно допустимых значений.
Также согласно изобретению, с целью минимизации погрешностей определения амплитуд и фаз вибраций опор при использовании жестко соединяемой с ротором технологической оснастки, пробные грузы прикрепляют дважды к каждой из плоскостей коррекции в двух взаимно противоположных угловых положениях, с последующим усреднением результатов измерений, причем одна из плоскостей коррекции принадлежит технологической оснастке.
Кроме того, с целью минимизации погрешностей определения коэффициентов балансировочной чувствительности стенда и коэффициентов взаимовлияния плоскостей коррекции при использовании жестко соединяемой с ротором технологической оснастки, измерение вибраций опор при вращении ротора в исходном состоянии выполняют дважды, при этом второе измерение выполняют после отсоединения технологической оснастки, разворота ротора на 180 градусов вокруг своей оси и его повторного жесткого соединения с технологической оснасткой.
Моделирование балансировочных дисбалансов с использованием коэффициентов взаимовлияния плоскостей коррекции позволяет подтвердить возможность достижения значений параметров массо-инерционной асимметрии, не превышающих предельно допустимых, при балансировке ротора в одной плоскости коррекции и более точно определить массу и угол установки балансировочного груза, без осуществления дополнительных балансировочных операций.
При использовании технологической оснастки прикрепление пробных грузов дважды к каждой из плоскостей коррекции в двух взаимно противоположных угловых положениях, с последующим усреднением результатов измерений, позволяет уменьшить погрешности измерений, вызванные возможным смещением центра плоскости коррекции относительно оси вращения.
Также при использовании технологической оснастки измерения вибраций опор при вращении ротора в исходном состоянии выполняют дважды, при этом второе измерение выполняют после отсоединения технологической оснастки, разворота ротора на 180 градусов вокруг своей оси и его повторного жесткого соединения с технологической оснасткой, что позволяет уменьшить погрешности, вызванные возможным перекосом геометрической оси ротора относительно оси вращения технологической оснастки.
Способ может быть реализован как на горизонтальном, так и на вертикальном балансировочном стенде.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в изобретениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
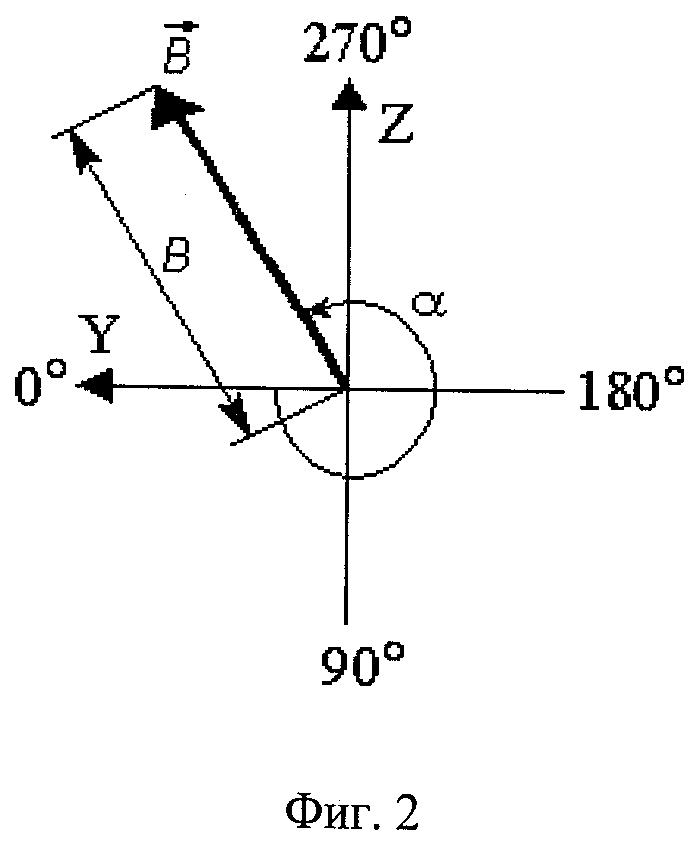
На фиг.1 показан ротор, установленный в опоры вертикального балансировочного стенда.
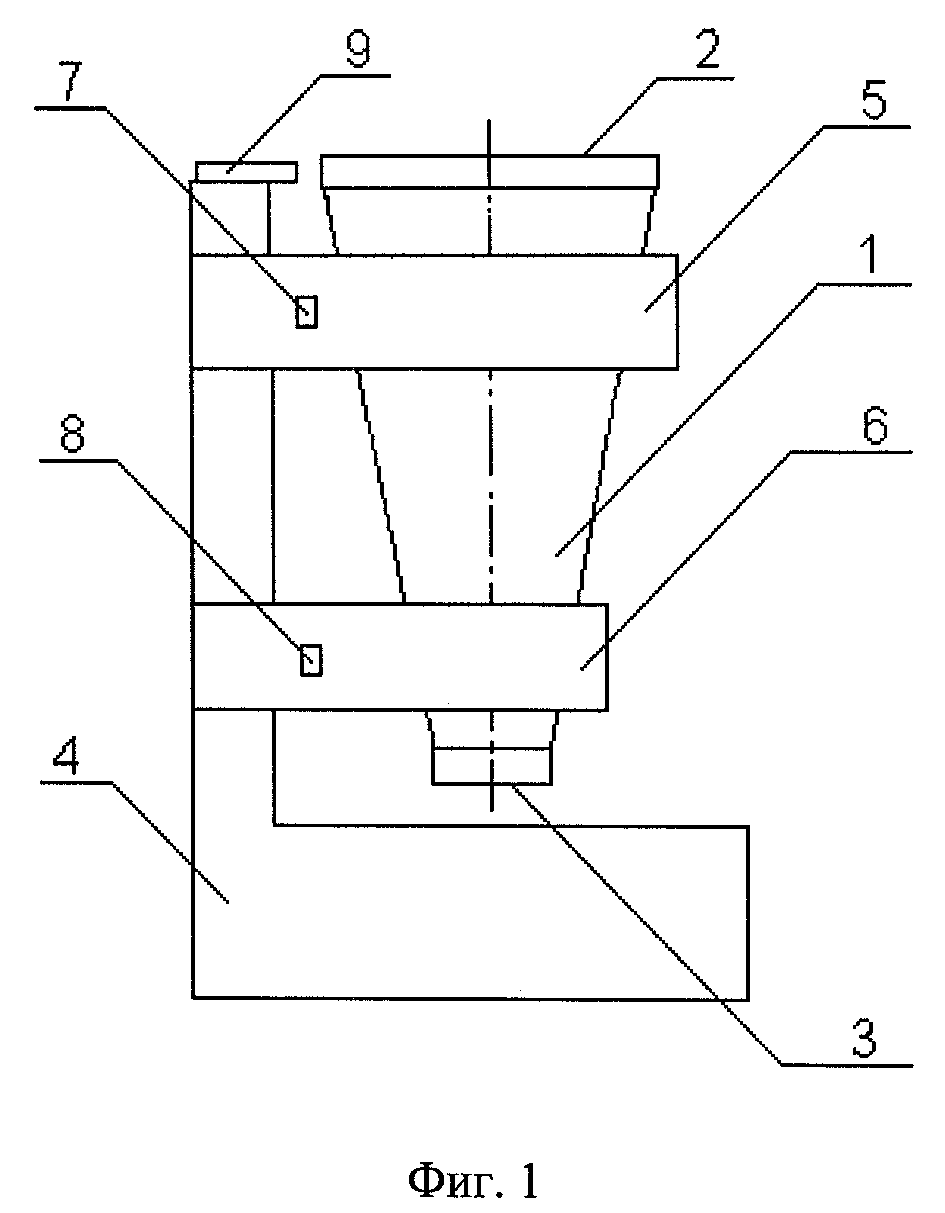
На фиг.2 показана векторная диаграмма для балансировочной плоскости, в которой действует дисбаланс  , характеризуемый значением B и углом α в связанной с ротором системе координат.
, характеризуемый значением B и углом α в связанной с ротором системе координат.
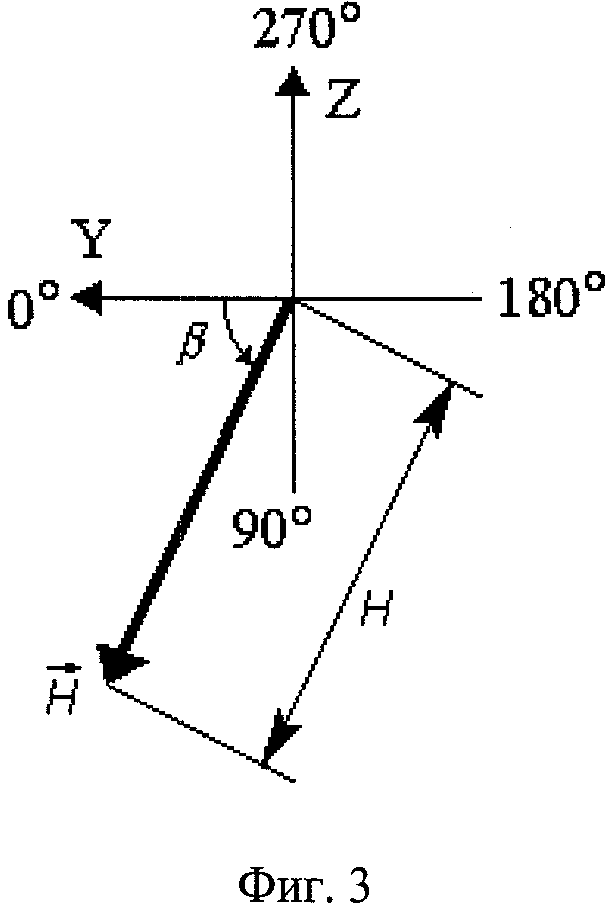
На фиг.3 показана векторная диаграмма для пробной плоскости коррекции, в которых действует дисбаланс  , характеризуемый значением H и углом β в связанной с ротором системе координат.
, характеризуемый значением H и углом β в связанной с ротором системе координат.
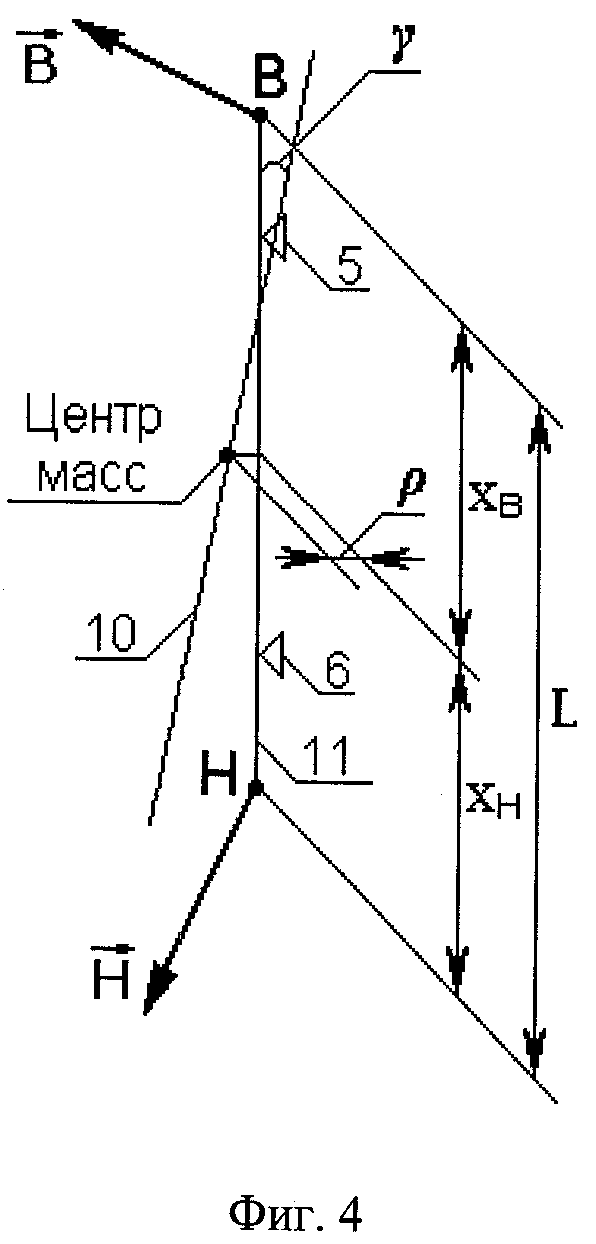
На фиг.4 показана расчетная схема ротора с действующими в двух - балансировочной (B) и пробной (H) - плоскостях коррекции дисбалансами. Также показаны параметры массо-инерционной асимметрии ротора, наличие которой обуславливает появление дисбалансов в балансировочной и пробной плоскостях коррекции вращающегося в опорах несбалансированного ротора.
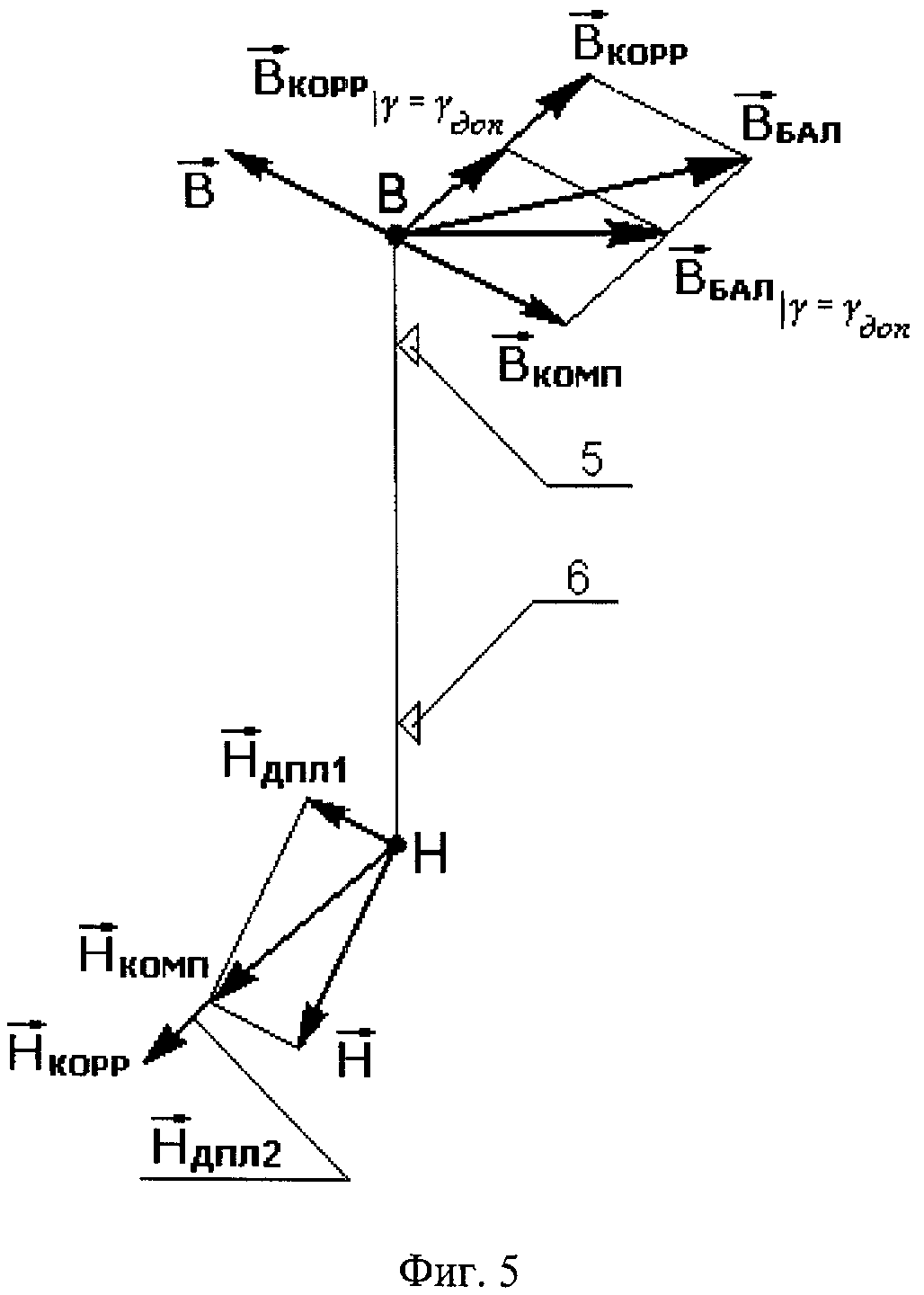
На фиг.5 показаны векторные диаграммы дисбалансов, действующих в плоскостях коррекции в процессе и после приведения значений параметров массо-инерционной асимметрии ротора к значениям, не превышающим заданных предельно допустимых значений.
Способ реализуется следующим образом. Ротор 1 (фиг.1), имеющий две плоскости коррекции, одна из которых является балансировочной 2, то есть предназначена как для временной установки пробных, так и для постоянной установки балансировочных грузов, а другая - пробной 3, то есть используется только для временной установки пробных грузов, устанавливают и приводят во вращение в опорах 5 и 6 стенда 4, имеющего датчики 7 и 8, измеряющие вибрации соответственно опор 5 и 6, и датчик 9 фиксирующий фазы вибраций опор 5 и 6. На постоянной рабочей частоте вращения ротора 1 измеряют амплитуды (А) и фазы (<р) вибраций опор 5 и 6 с помощью датчиков 7, 8 и 9.
При отсутствии у ротора 1 пробной плоскости коррекции 3 эта плоскость может быть образована за счет использования различных вариантов технологической оснастки (на чертеже не показана), жестко соединенной с ротором. В этом случае функцию пробной плоскости коррекции будет выполнять плоскость коррекции, образованная технологической оснасткой, расположенная на известном расстоянии от центра масс ротора и обладающая известным радиусом установки пробных грузов.
Также ротор 1 имеет заданные предельно допустимыме значения параметров массо-инерционной асимметрии и обладает известными массой, расстояниями от центра масс до плоскостей коррекции 2 и 3, радиусами установки балансировочных грузов rв и rн в плоскостях коррекции 2 и 3 и значениями аксиального и экваториального моментов инерции.
В ходе балансировочного эксперимента ротор 1 сначала приводят во вращение в исходном состоянии, то есть с начальными дисбалансами, измеряют, с помощью датчиков 7, 8 и 9, амплитуды и фазы вибраций опор, обусловленные начальной асимметрией ротора 1. После останова ротора 1 в одной из плоскостей коррекции 2 или 3, например, в балансировочной плоскости коррекции 2 устанавливают первый пробный груз известной массы mв в известном угловом положении φmВ на известном радиусе rВ. Снова приводят ротор 1 во вращение, измеряют амплитуды и фазы вибраций опор 5 и 6, поступающих от датчиков 7 и 8, после чего ротор 1 останавливают. Снимают первый пробный груз и прикрепляют во второй, например, пробной плоскости коррекции 3 второй пробный груз известной массы mH в известном угловом положении φmH на известном радиусе rH. Вновь приводят ротор 1 во вращение, измеряют амплитуды и фазы вибраций опор, с помощью датчиков 7, 8 и 9.
Затем, в ходе обработки полученных данных, выделяют амплитуды и фазы вибраций опор, обусловленные только наличием пробных грузов, установленных на соответствующих плоскостях коррекции, тем самым, исключая влияние начальных дисбалансов на результаты измерений. После чего рассчитывают коэффициенты балансировочной чувствительности стенда 4 и коэффициенты взаимовлияния плоскостей коррекции 2 и 3, по формулам:
 ;
;
 ;
;

 ;
;
где АВ - амплитуда вибрации опоры 5 при вращении ротора с начальным дисбалансом;
АН - амплитуда вибрации опоры 6 при вращении ротора с начальным дисбалансом;
 - амплитуда вибрации опоры 5 при наличии пробного груза в балансировочной плоскости коррекции 2;
- амплитуда вибрации опоры 5 при наличии пробного груза в балансировочной плоскости коррекции 2;
 - фаза вибрации опоры 5 при наличии пробного груза в балансировочной плоскости коррекции 2;
- фаза вибрации опоры 5 при наличии пробного груза в балансировочной плоскости коррекции 2;
 - амплитуда вибрации опоры 5 при наличии пробного груза в пробной плоскости коррекции 3;
- амплитуда вибрации опоры 5 при наличии пробного груза в пробной плоскости коррекции 3;
 - амплитуда вибрации опоры 6 при наличии пробного груза в балансировочной плоскости коррекции 2;
- амплитуда вибрации опоры 6 при наличии пробного груза в балансировочной плоскости коррекции 2;
 - амплитуда вибрации опоры 6 при наличии пробного груза в пробной плоскости коррекции 3;
- амплитуда вибрации опоры 6 при наличии пробного груза в пробной плоскости коррекции 3;
 - фаза вибрации опоры 6 при наличии пробного груза в пробной плоскости коррекции 3;
- фаза вибрации опоры 6 при наличии пробного груза в пробной плоскости коррекции 3;
KB - коэффициент балансировочной чувствительности стенда 1 к значению дисбаланса в балансировочной плоскости коррекции 2;
KφB - коэффициент балансировочной чувствительности стенда 1 к углу дисбаланса в балансировочной плоскости коррекции 2;
KH - коэффициент балансировочной чувствительности стенда 1 к значению дисбаланса в пробной плоскости коррекции 3;
KφH - коэффициент балансировочной чувствительности стенда 1 к углу дисбаланса в пробной плоскости коррекции 3;
KHB - коэффициент влияния балансировочной плоскости коррекции 2 на пробную плоскость коррекции 3 при наличии дисбаланса в балансировочной плоскости коррекции 2;
KBH - коэффициент влияния пробной плоскости коррекции 3 на балансировочную плоскость коррекции 2 при наличии дисбаланса в пробной плоскости коррекции 3.
Затем с использованием полученных коэффициентов, а также значений амплитуд и фаз вибраций опор, полученных при вращении ротора с начальными дисбалансами, определяют значения (B, H) и угловые положения (α, β) векторов начальных дисбалансов  и
и  , соответственно действующих в балансировочной (фиг.2) и пробной (фиг.3) плоскостях коррекции, по формулам:
, соответственно действующих в балансировочной (фиг.2) и пробной (фиг.3) плоскостях коррекции, по формулам:
 ; αΣ=φB-KφB;
; αΣ=φB-KφB;
 ; βΣ=φH-KφH;
; βΣ=φH-KφH;
где φB и φH - фазы вибрации соответственно опор 5 и 6 при вращении ротора 1 с начальными дисбалансами;
BH=HΣ·KBH; αH=βΣ+180°;
HB=BΣ·KHB; βH=αΣ+180°;
 ;
;
 ;
;
 ;
;
По значениям и углам начальных дисбалансов, а также по известным массе, расстояниям от центра масс до плоскостей коррекции 2 и 3, значениям аксиального и экваториального моментов инерции ротора, находят начальные значения поперечного смещения центра масс и угла отклонения продольной главной центральной оси инерции относительно геометрической оси ротора, которыми являются радиус-вектор начального поперечного смещения центра масс  и вектор-угол
и вектор-угол  отклонения продольной ГЦОИ 10 от геометрической оси 11 (фиг.4) ротора 1, по формулам:
отклонения продольной ГЦОИ 10 от геометрической оси 11 (фиг.4) ротора 1, по формулам:
 ;
;
 ,
,
где M - масса ротора;
 - вектор начального дисбаланса, действующего в балансировочной плоскости коррекции 2 радиусом rB;
- вектор начального дисбаланса, действующего в балансировочной плоскости коррекции 2 радиусом rB;
 - вектор начального дисбаланса, действующего в пробной плоскости коррекции 3 радиусом rH;
- вектор начального дисбаланса, действующего в пробной плоскости коррекции 3 радиусом rH;
xB - расстояние от центра масс ротора 1 до балансировочной плоскости коррекции 2;
xH - расстояние от центра масс ротора 1 до пробной плоскости коррекции 3;
Iэ - экваториальный момент инерции ротора 1;
Ia - аксиальный момент инерции ротора 1.
Если величина поперечного смещения центра масс ρнач и угол γнач отклонения продольной ГЦОИ 10 от геометрической оси 11 ротора 1 не превышают своих заданных предельно допустимых значений (соответственно ρдоп и γдоп), то балансировочный эксперимент завершают и оформляют протокол балансировки, в котором указывают полученные значения массо-инерционной асимметрии.
В случае если значение хотя бы одного из указанных начальных параметров массо-инерционной асимметрии ротора 1 превышает соответствующее предельно допустимое значение, то изменяют дисбаланс в балансировочной плоскости коррекции 2, создав балансировочный дисбаланс  путем установки в этой плоскости коррекции балансировочного груза. Массу и угол установки балансировочного груза определяют с помощью значений вектора балансировочного дисбаланса
путем установки в этой плоскости коррекции балансировочного груза. Массу и угол установки балансировочного груза определяют с помощью значений вектора балансировочного дисбаланса  .
.
Для определения значений вектора балансировочного дисбаланса  сначала устраняют действие начального дисбаланса в балансировочной плоскости коррекции 2 путем моделирования в этой плоскости дисбаланса
сначала устраняют действие начального дисбаланса в балансировочной плоскости коррекции 2 путем моделирования в этой плоскости дисбаланса  5, равного по значению, но противоположного по направлению начальному дисбалансу , компенсирующего действие дисбаланса в указанной плоскости коррекции. В результате геометрическая ось 11 и продольная ГЦОИ 10 ротора 1 будут приведены к режиму квазистатической неуравновешенности, когда указанные оси пересекаются не в центре масс. При этом в пробной плоскости коррекции возникнет дополнительный дисбаланс
5, равного по значению, но противоположного по направлению начальному дисбалансу , компенсирующего действие дисбаланса в указанной плоскости коррекции. В результате геометрическая ось 11 и продольная ГЦОИ 10 ротора 1 будут приведены к режиму квазистатической неуравновешенности, когда указанные оси пересекаются не в центре масс. При этом в пробной плоскости коррекции возникнет дополнительный дисбаланс  , образовавшийся в результате влияния балансировочной плоскости коррекции 2 с действующим в этой плоскости дисбалансом
, образовавшийся в результате влияния балансировочной плоскости коррекции 2 с действующим в этой плоскости дисбалансом  на пробную плоскость коррекции 3, значение которого находят по формуле:
на пробную плоскость коррекции 3, значение которого находят по формуле:
НДПЛ1=ВКОМП·КНВ,
а угловое положение дополнительного дисбаланса  будет противоположным угловому положению дисбаланса , так как он образован в результате взаимовлияния плоскостей коррекции.
будет противоположным угловому положению дисбаланса , так как он образован в результате взаимовлияния плоскостей коррекции.
После определения параметров дополнительного дисбаланса находят значение и угловое положение дисбаланса  в пробной плоскости коррекции 3, путем геометрического сложения векторов двух дисбалансов, действующих в этой плоскости - начального
в пробной плоскости коррекции 3, путем геометрического сложения векторов двух дисбалансов, действующих в этой плоскости - начального  и дополнительного по формуле:
и дополнительного по формуле:

Затем моделируют создание дисбаланса  в балансировочной плоскости коррекции в противоположном направлении дисбалансу
в балансировочной плоскости коррекции в противоположном направлении дисбалансу  , при этом в пробной плоскости коррекции возникает дисбаланс
, при этом в пробной плоскости коррекции возникает дисбаланс  , значение которого уравнивается со значением
, значение которого уравнивается со значением  , с помощью коэффициента взаимовлияния плоскостей коррекции.
, с помощью коэффициента взаимовлияния плоскостей коррекции.
Для этого сначала определяют значение дисбаланса по формуле:
 ,
,
а затем определяют значение  , на которое увеличилось значение дисбаланса
, на которое увеличилось значение дисбаланса  , в результате действия дисбаланса
, в результате действия дисбаланса  в балансировочной плоскости коррекции, по формуле:
в балансировочной плоскости коррекции, по формуле:
НДПЛ2=ВКОРР· КНВ,
после чего определяют значение дисбаланса  , возникшего в результате увеличения дисбаланса на значение , по формуле:
, возникшего в результате увеличения дисбаланса на значение , по формуле:

В результате, геометрическая ось 11 ротора 1 и его продольная ГЦОИ 10 будут приведены к режиму моментной неуравновешенности, когда дисбалансы и , действующие в плоскостях коррекции 2 и 3, равны по значению, но противоположны по направлению, а указанные оси 10 и 11 пересекаются в центре масс, что указывает на отсутствие поперечного смещения центра масс с геометрической оси 11 ротора 1 и, соответственно, не превышению предельно допустимых значений данного параметра.
Далее рассчитывают ожидаемое (в режиме моментной неуравновешенности) значение γКОРР угла отклонения продольной ГЦОИ 10 от геометрической оси 11 ротора 1, по формуле:
где L - расстояние между плоскостями коррекции 2 и 3.
В случаях, когда значение γКОРР не превышает своего предельно допустимого значения γдоп, определяют значение ВБАЛ и угловое положение αБАЛ вектора балансировочного дисбаланса  используя соответствующие параметры смоделированных в балансировочной плоскости коррекции 2 векторов дисбалансов и
используя соответствующие параметры смоделированных в балансировочной плоскости коррекции 2 векторов дисбалансов и  . После чего по значению вектора балансировочного дисбаланса
. После чего по значению вектора балансировочного дисбаланса  определяют массу балансировочного груза, установку которого производят в угловом положении, соответствующем угловому положению
определяют массу балансировочного груза, установку которого производят в угловом положении, соответствующем угловому положению  Для определения массы и угла установки балансировочного груза используют формулы:
Для определения массы и угла установки балансировочного груза используют формулы:

 ,
,

где αКОМП - угловое положение дисбаланса , а αКОРР - угловое положение дисбаланса .
После чего проводят корректировку массы ротора 1, прикрепив балансировочный груз к балансировочной плоскости 2, обеспечив тем самым приведение обоих параметров массо-инерционной асимметрии к значениям, не превышающим предельно допустимых.
В случаях, когда значение γКОРР будет превышать предельно допустимое значение γдоп, рассчитывают предполагаемое значение  поперечного смещения центра масс с оси симметрии 11 (минимально возможное для ротора 1), которое может быть достигнуто путем изменения дисбаланса в балансировочной плоскости коррекции 2 для уменьшения значения угла отклонения продольной ГЦОИ 10 до предельно допустимого значения γдоп по формуле:
поперечного смещения центра масс с оси симметрии 11 (минимально возможное для ротора 1), которое может быть достигнуто путем изменения дисбаланса в балансировочной плоскости коррекции 2 для уменьшения значения угла отклонения продольной ГЦОИ 10 до предельно допустимого значения γдоп по формуле:
В случаях, когда полученное значение будет превышать заданное предельно допустимое значение ρдоп, балансировочный эксперимент прекращают, а ротор 1 бракуют и направляют изготовителю на перекомпоновку. В ином случае, то есть когда полученное значение поперечного смещения центра масс ротора 1 не превышает своего предельно допустимого значения, определяют значение вектора дисбаланса  сонаправленного вектору и обеспечивающего достижение значения по формуле:
сонаправленного вектору и обеспечивающего достижение значения по формуле:

при этом благодаря взаимовлиянию плоскостей коррекции значение дисбаланса  изменится на величину
изменится на величину  (на чертеже не показан) в результате действия дисбаланса
(на чертеже не показан) в результате действия дисбаланса  в балансировочной плоскости коррекции, значение которой определяют по формуле:
в балансировочной плоскости коррекции, значение которой определяют по формуле:
 .
.
Затем определяют значение  и угловое положение
и угловое положение  вектора балансировочного дисбаланса
вектора балансировочного дисбаланса  , используя соответствующие параметры смоделированных в балансировочной плоскости коррекции 2 векторов дисбалансов
и
, используя соответствующие параметры смоделированных в балансировочной плоскости коррекции 2 векторов дисбалансов
и  . После чего по значению вектора балансировочного дисбаланса определяют массу балансировочного груза, установку которого производят в угловом положении, соответствующем угловому положению . Для определения значения балансировочного дисбаланса, массы и угла установки балансировочного груза используют формулы:
. После чего по значению вектора балансировочного дисбаланса определяют массу балансировочного груза, установку которого производят в угловом положении, соответствующем угловому положению . Для определения значения балансировочного дисбаланса, массы и угла установки балансировочного груза используют формулы:
 ,
,
 ,
,

После чего проводят корректировку массы ротора 1, прикрепив балансировочный груз к балансировочной плоскости 2, обеспечив тем самым приведение обоих параметров массо-инерционной асимметрии к значениям, не превышающим предельно допустимых.
При такой последовательности действий обеспечивается приведение одновременно двух параметров массо-инерционной асимметрии ротора - величины поперечного смещения центра масс и угла отклонения продольной ГЦОИ от геометрической оси ротора - к значениям, не превышающим соответствующих предельно допустимых значений (заданных в эксплуатационной документации на ротор) с обеспечением минимального смещения центра масс с геометрической оси и, соответственно, сокращением числа операций балансировки и время балансировки ротора, а также обеспечивается повышение информативности процесса балансировки ротора и точности вычисления массы и углового положения балансировочного груза.
Экспериментальное опробование, проведенное на вертикальном балансировочном стенде с опорами, выполненными в виде конических газостатических подшипников, подтвердило высокую точность и эффективность способа.
Прикрепление пробных грузов дважды к каждой из плоскостей коррекции в двух взаимно противоположных угловых положениях, с последующим усреднением результатов измерений позволяет уменьшить погрешности, вызванные возможным поперечным смещением центров плоскостей коррекции с оси вращения, связанные со смещением центров окружностей, по которым расположены места для установки балансировочных и пробных грузов.
Выполнение измерений вибраций опор, дважды, при вращении ротора, жестко соединенного с технологической оснасткой в исходном состоянии и после разворота ротора на 180 градусов вокруг своей оси с его повторным жестким соединением с технологической оснасткой, а затем с последующим усреднением полученных значений, позволяет уменьшить погрешности, связанные с неидеальностью изготовления сопрягаемых поверхностей ротора и оснастки, возможным перекосом оси симметрии ротора относительно оси вращения технологической оснастки.
Способ измерения энергетических спектров импульсного гамма-излучения
Устройство формирования компактного элемента
Способ определения сплошности покрытия изделия
Установка для испытаний металлического урана
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Способ контроля электронно-лучевой сварки
Исполнительное коммутирующее устройство
Способ измерения энергетических спектров импульсного гамма-излучения
Устройство формирования компактного элемента
Способ определения сплошности покрытия изделия
Установка для испытаний металлического урана
Затвор люка камеры
Складываемая аэродинамическая поверхность
Контактный датчик
Двухдиапазонная микрополосковая антенна круговой поляризации
Способ контроля электронно-лучевой сварки
Исполнительное коммутирующее устройство

