Результат интеллектуальной деятельности: СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ
Вид РИД
Изобретение
Изобретение относится к автоматическому управлению, а именно к адаптивному двухпозиционному регулированию, и может быть использовано как при управлении бытовыми объектами (электропечи, холодильники), так и общепромышленными объектами (муфельные печи, промышленные холодильники).
Известны способы двухпозиционного регулирования на основе прямой релейной характеристики, переключение осуществляется при переходе регулируемой величины через линию задания, низкий уровень сигнала соответствует нахождению регулируемой величины под линией задания, высокий уровень соответствует нахождению регулируемой величины над линией задания (А.А. Кампе-Немм. Автоматическое двухпозиционное регулирование. - М.: Наука, 1967, с.7). Недостатком такого способа является низкое качество регулирования. При использовании релейного закона управления с зоной неоднозначности удается избежать частых переключений, но при этом ухудшается качество регулирования.
Также известен способ, основанный на выбеге регулируемой величины за заданную зону адаптации. В зависимости от направления выбега изменяют значение недействующей позиции регулятора в сторону действующей позиции регулятора согласно пат. №2144690 МПК7, G05В 11/16. Недостатком этого способа является низкая скорость сходимости вследствие большого количества итераций. Более высокая скорость адаптации достигается путем присвоения недействующей позиции усредненного значения действующей и недействующего значения в случае выбега регулируемого параметра за зону адаптации, пат. №2158435 МПК7, G05В 11/18. Однако в этих способах адаптация проходит только в одном направлении (величина управляющего воздействия может только уменьшаться), и способ не предлагает возможности перенастройки значения управляющего воздействия в случае изменения нагрузки объекта. В пат. №2129726 МПК7, G05В 11/54, 11/16 предлагается введение зоны реадаптации. В случае выбега регулируемой величины за зону реадаптации действующей позиции присваивается ее крайнее значение и адаптация начинается заново. Во всех вышеописанных способах на входе регулятора используется аналоговый сигнал, тогда как достаточным для управления может являться двухпозиционный сигнал. Также на выходе регулятора используется позиционный сигнал управления, тогда как использование двухпозиционного сигнала позволяет значительно упростить конструкцию и принцип действия регуляторов, основанных на адаптации управляющего воздействия под текущую нагрузку объекта.
Цель изобретения - ускорение процесса адаптации и улучшение параметров качества регулируемого процесса, приводящего к снижению энергопотребления объекта управления.
Технический результат состоит в предложении нового способа адаптивного двухпозиционного регулирования, приводящего к уменьшению амплитуды автоколебаний и энергосбережению.
Поставленная цель достигается за счет того, что в предложенном способе автоматического двухпозиционного регулирования колебательных процессов, основанным на адаптации длительности управляющего воздействия с изменяющимся шагом под текущую нагрузку объекта управления с использованием двухпозиционного сигнала на входе и на выходе регулятора, изменение шага производится итерационно в зависимости от скорости схождения процесса и приближения длительности верхней полуволны Тn2 к значению выражения (1+Tn1/Tu1)·k·Tn1, где Tn1, Tu1 - длительность верхней и нижней полуволны процесса в установившемся режиме при двухпозиционном регулировании, k - коэффициент, характеризующий требуемое качество адаптации, на следующем этапе адаптация происходит итерационно пошагово с величиной шага 1, с критерием качества Tn2≤k·Tn1, после чего управляющее воздействие представляет собой адаптированный выходной сигнал длительностью (1-0.01·k·l)·Tu2, где Тu2 - длительность управляющего воздействия, полученного на этапе адаптации с переменным шагом; l - коэффициент, полученный на этапе адаптации с постоянным шагом.
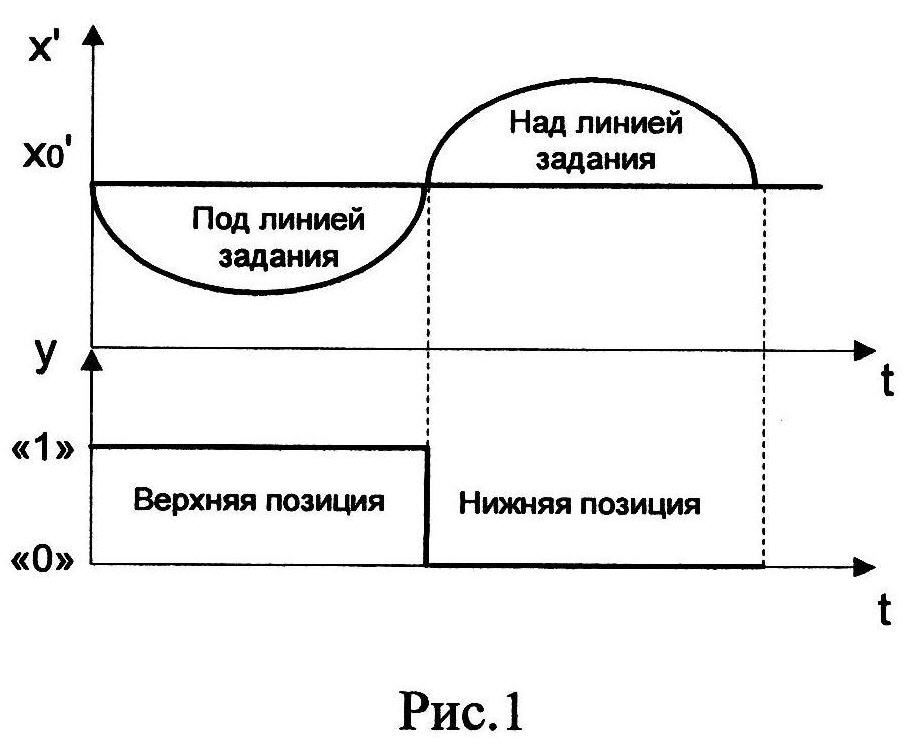
При включении системы регулируемая переменная х', например температура, изменяется от своего исходного состояния до некоторого заданного значения х0, при этом на вход регулятора поступает высокий уровень входного сигнала у (логическая единица «1») при нахождении регулируемой переменной х' ниже заданного значения. На вход регулятора поступает низкий уровень входного сигнала у (логический ноль «0») при нахождении регулируемой переменной х' выше заданного значения:
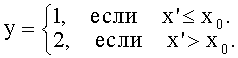
Такой закон управления называется обратной релейной характеристикой (Рис.1). В не установившемся режиме производится ретрансляция значения входного сигнала х' на выход, т.е. u=х'. При таком регулировании динамика процесса представляет собой автоколебательный режим, причем амплитуда колебаний будет затухать до некоторого установившегося значения.
Предложенный способ подавления автоколебаний состоит в реализации следующих этапов.
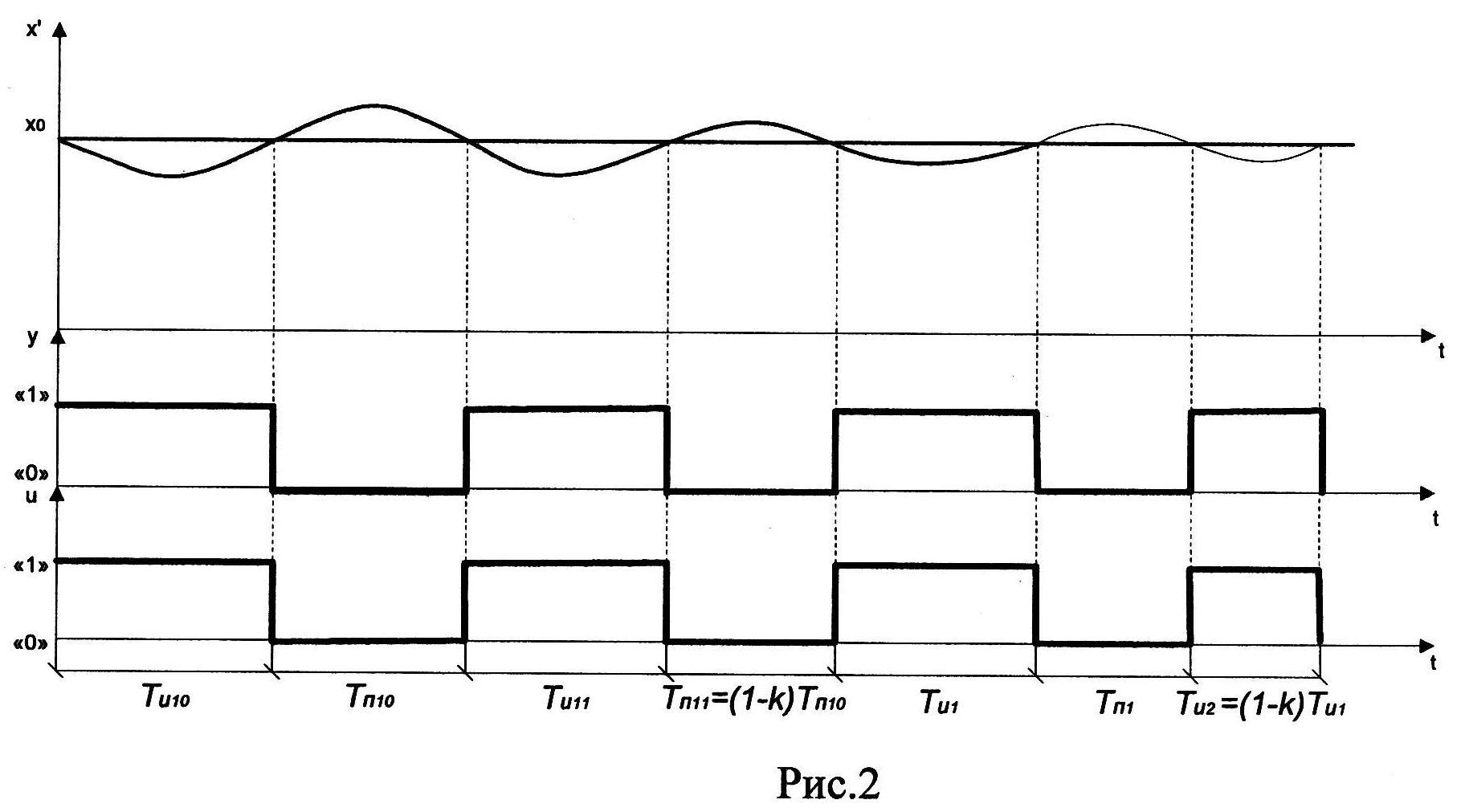
Этап 1. После выхода регулируемого параметра на установившийся автоколебательный режим, чему соответствует Tn11≤(1-k)-Tn10 (где k<1 - коэффициент, характеризующий требуемое качество адаптации; Тn11, Тn10 - длительность верхней полуволны текущего и предыдущего колебания (Рис.2)). Происходит ожидание изменения уровня входного сигнала y с низкого на высокий. После перехода входного сигнала y из состояния «0» в «1» на выходе (управляющий сигнал u) устанавливается высокий уровень и начинается подсчет длительности нахождения входного сигнала y в состояние «1» - Тu1. При изменении уровня входного сигнала y с высокого на низкий, что происходит при изменении знака полуволны х', подсчет Tu1 останавливается и производится подсчет длительности нахождения входного сигнала y в состояние «0» - Tn1, который останавливается при изменении уровня входного сигнала с низкого на высокий.
Этап 2. После перехода входного сигнала y из состояния «0» в «1» выходной сигнал u устанавливается в верхнюю позицию на длительность Тu2 (где начальное значение Tu2=(1-k)·Tu1), если в течение этого времени позиция входного сигнала изменяется на низкую, то выполнение алгоритма возвращается к измерению длительностей Tu1 и Tn1. После истечения Tu2 сигнал управления u переводится в нижнюю позицию и находится в ней в течение интервала (1+0.1-Tn1/Tu1)·(Tn1-Tu2) (увеличение времени ожидания обусловлено возможным замедлением скорости нарастания регулируемого параметра (Рис.3)). Если в течение этого времени изменения фронта входного сигнала с высокого на низкий не происходит, то значение Tu2:=(1+k)·Tu2, а выполнение переходит к этапу 3, в ином случае выполнение переходит к этапу 4.
Этап 3. Выходной сигнал u устанавливается в верхнюю позицию на время n·Tu1·k (где изначально n=2), после чего выходной сигнал u устанавливается в нижнюю позицию на время (1+0.1·Тn1/Тu1)·(Тu1-Тu2)/n. Если входной сигнал y в течение итерации изменился с «1» на «0», то m:=(l+n·k) исполнение переходит к этапу 2. В ином случае n:=n·2 и выполнение возвращается к началу этапа 3.
Этап 4. После перехода входного сигнала из состояния «1» в «0» производится измерение Tn - времени нахождения входного сигнала к нижней позиции, после чего производится вычисление коэффициента m:=Тn2/Тn1 (если величина m>1, то выполнение переходит к этапу 2, а m:=(1-k). Затем производится сравнение Tn с (1+Tn1/Tu1)·k·Tn1. Если Tn≤(1+Tn1/Tu1)·k·Tn1, то выполнение переходит к этапу 5, в ином случае Tu2:=(1+k)·Tu2 и выполнение возвращается к этапу 2.

Этап 5. После перехода входного сигнала y из состояния «0» в «1» выходной сигнал u переводится в верхнюю позицию на длительность Tu3:=(1-0.01·k·l)·Tu3 (где начальное значение Tu3=Tu2, т.е. длительности импульса, полученного в ходе режима настройки, а l - номер текущей итерации, изначально равный 1). После истечения интервала времени Tu3 выходной сигнал u переводится в нижнюю позицию на (1+0.1·Tn1/Tu1)·(Tu1-Tu3), если в течение этого времени изменения позиции входного сигнала y с «1» на «0» не происходит, то выполнение переходит к этапу 3. В ином случае измеряется Тn3 - время, в течение которого y находился в нижней позиции, и сравнивается с k·Tn1. Если Tn3>k·Tn1, то l:=l+1, в ином случае l:=l. Выполнение возвращается к началу этапа 5.
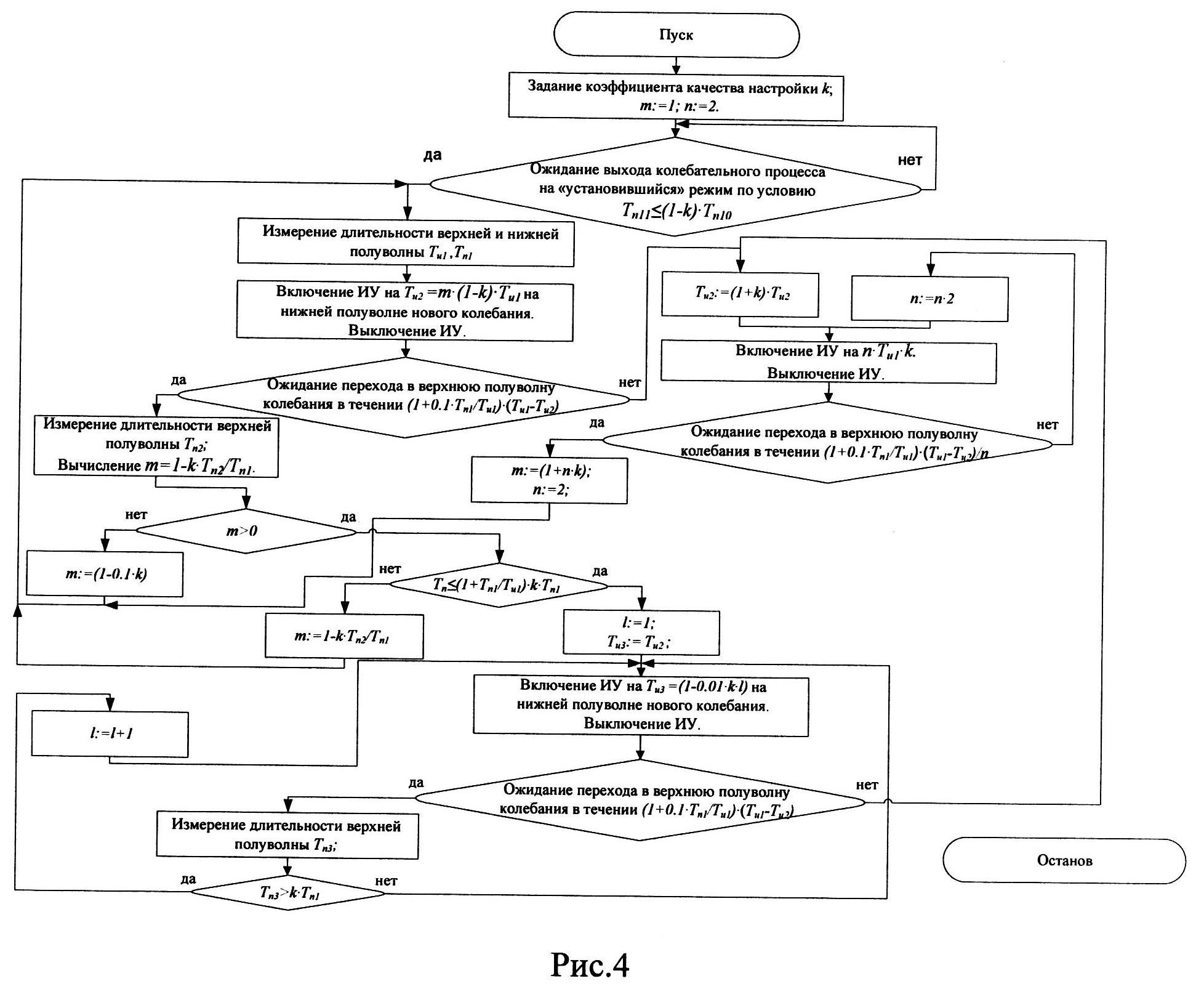
Графическое описание способа представлено в виде блок-схемы на Рис.4.
Способ автоматического двухпозиционного регулирования колебательных процессов, основанный на адаптации длительности управляющего воздействия с изменяющимся шагом под текущую нагрузку объекта управления с использованием двухпозиционного сигнала на входе и на выходе регулятора, отличающийся тем, что изменение шага производится итерационно в зависимости от скорости схождения процесса и приближения длительности верхней полуволны T к значению выражения (1+T/T)·k·T, где T, T - длительность верхней и нижней полуволны процесса в установившемся режиме при двухпозиционном регулировании; k - коэффициент, характеризующий требуемое качество адаптации, на следующем этапе адаптация происходит итерационно пошагово с величиной шага 1, с критерием качества T≤k·T, после чего управляющее воздействие представляет собой адаптированный выходной сигнал длительностью (1-0.01·k·)·Т, где Т - длительность управляющего воздействия, полученного на этапе адаптации с переменным шагом; - коэффициент, полученный на этапе адаптации с постоянным шагом.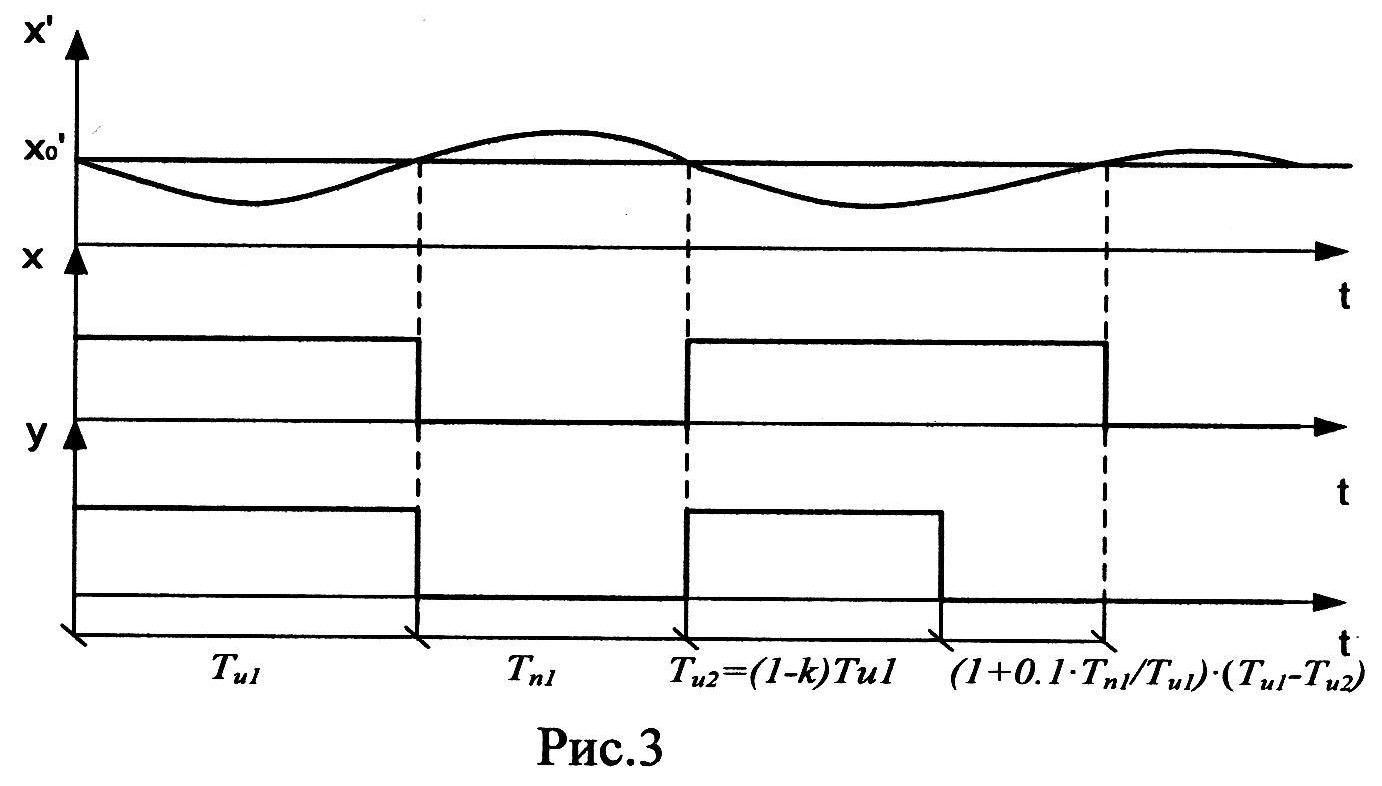

Генератор хаотических колебаний
Способ металлизации автоклавных стеновых материалов
Стенд и способ исследования движения робокара
Дезинтегратор
Способ автоматического подавления вибрации помольно-смесительного агрегата
Способ заполнения нанотрубок тугоплавкими малорастворимыми соединениями
Способ свч-обработки диэлектрических материалов (варианты)
Способ идентификации сложного объекта управления дробного порядка
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Устройство регулирования температуры индукционного электронагрева
Генератор хаотических колебаний
Способ металлизации автоклавных стеновых материалов
Стенд и способ исследования движения робокара
Дезинтегратор
Способ автоматического подавления вибрации помольно-смесительного агрегата
Способ заполнения нанотрубок тугоплавкими малорастворимыми соединениями
Способ свч-обработки диэлектрических материалов (варианты)
Способ идентификации сложного объекта управления дробного порядка
Устройство и способ автоматического подавления вибрации помольно-смесительного агрегата
Устройство регулирования температуры индукционного электронагрева

