Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области космической техники и может быть использовано при создании трехосной гироскопической системы ориентации (ГСО) для космического аппарата (КА) на околокруговой орбите.
Наиболее близким аналогом может служить техническое решение, представленное в статье авторов Кэмпбел, Коффи «Цифровые системы отсчета углов». Журнал «Вопросы ракетной техники», 1971 г., №11, стр.63÷88. В нем рассматривается ГСО в составе гироскопического трехосного блока датчиков угловых скоростей (ДУС), оптикоэлектронного построителя местной вертикали (ПМВ), например типа ИК-вертикали и вычислителя, реализующего алгоритм режима орбитального гирокомпасирования относительно орбитальной системы координат (ОСК).
Известна также система ориентации в составе трехосного гироприбора ориентации в кардановом подвесе, ИК-вертикали, вычислителя и задатчика путевого угла по курсу («Система управления космических комплексов на базе орбитальной станции «Алмаз»». Эскизный проект. Система ориентации, стр.6, 72, 188. НПО Машиностроения. 1990 г.). Данная система работает в режиме трехосного орбитального гирокомпаса и в процессе программного движения по курсу строит путевой угол.
Недостаток системы заключается в том, что при построении путевой системы координат (ПСК) космический аппарат совершает вынужденные колебательные движения по курсу относительно плоскости орбиты с амплитудой путевого угла и частотой орбитального движения, что приводит к запаздыванию отработки программных значений путевого угла и увеличенному расходу энергии.
Целью предлагаемого решения является устранение казанных недостатков, т.е. создание способа и устройства для его осуществления по ориентации КА в ПСК без непрерывного колебательного движения КА по курсу относительно плоскости ОСК, без запаздывания в отработке программного угла курса и без дополнительного расхода энергии.
Согласно изобретению способа технический результат достигается тем, что в известный способ ориентации, содержащий угловую стабилизацию КА по курсу, крену и тангажу относительно построенной ОСК, повороты КА на текущий курсовой путевой угол для подспутниковой траектории на Земле, перед каждым сеансом работы аппаратуры наблюдения (АН) наземных объектов поворот АН на заданный угол крена и доворот КА по курсу при отклонении визирной оси АН по крену от подспутниковой траектории, введены новые приемы и условия. Одновременно с поворотом КА на путевой угол курса поворачивают КА на путевой угол крена и продолжают стабилизировать КА по трем углам относительно вновь образованной приборной путевой плоскости, повернутой относительно линии узлов орбиты на угол, равный амплитуде путевого угла, а поворот визирной оси АН на заданный угол крена относительно ОСК выполняют за вычетом текущего путевого крена, причем курсовой и креновый путевой углы соответствуют выражениям:
ψП=АПcosΩП(t-t0) - текущий путевой угол курса;
γП=-АПsinΩП(t-t0) - текущий путевой угол крена;
где ψП, γП - курсовой и креновый путевые текущие углы относительно ОСК; АП - амплитуда путевого угла; ΩП - программная угловая скорость, равная текущей орбитальной скорости Q движения центра масс КА; t - текущее время; t0 - время прохождения КА входящего узла орбиты.
Согласно изобретению устройства для реализации способа технический результат достигается тем, что в известное устройство, содержащее последовательно соединенные построитель местной тикали ПМВ по каналу крена, первый сумматор, первое усилительно-преобразующее устройство УПУ, второй сумматор, второй вход которого подключен к датчику угловой скорости ДУС по каналу крена, первый интегратор, первый блок управления БУ и двигатель-маховик ДМ по каналу крена, также последовательно соединенные второй УПУ, вход которого подключен ко входу первого УПУ, третий сумматор, второй вход которого подключен к ДУС по каналу курса, второй интегратор, четвертый сумматор, второй вход которого подключен к задатчику курсового угла, второй БУ и ДМ по каналу курса, также последовательно соединенные ПМВ по каналу тангажа, пятый сумматор, третий УПУ, шестой сумматор, второй вход которого подключен к ДУС по каналу тангажа, третий интегратор, третий БУ и ДМ по каналу тангажа, причем вторые входы первого и пятого сумматоров подключены соответственно к выходам первого и третьего интеграторов, третий вход второго сумматора подключен через первый задатчик орбитальной угловой скорости к выходу второго интегратора, третий вход третьего сумматора подключен через второй задатчик орбитальной угловой скорости к выходу первого интегратора, третий выход шестого сумматора подключен к третьему задатчику орбитальной угловой скорости, вторые входы первого, второго и третьего БУ подключены соответственно к выходам второго, третьего и шестого сумматоров, также привод поворота визирной оси АН, вход которого подключен к задатчику угла крена, дополнительно ведены новые блоки и связи: последовательно соединенные вычислитель программного угла крена и управляемый коммутатор, выход которого подключен к третьему входу первого сумматора, а два управляемых входа - к внешнему источнику команд «ОСК» и «ПСК», во входную цепь привода поворота АН введен седьмой сумматор, второй вход которого подключен к выходу управляемого коммутатора, а третий вход - к выходу первого интегратора, причем выходной сигнал вычислителя программного угла крена соответствует выражению: γП=-АПsinΩП(t-t0).
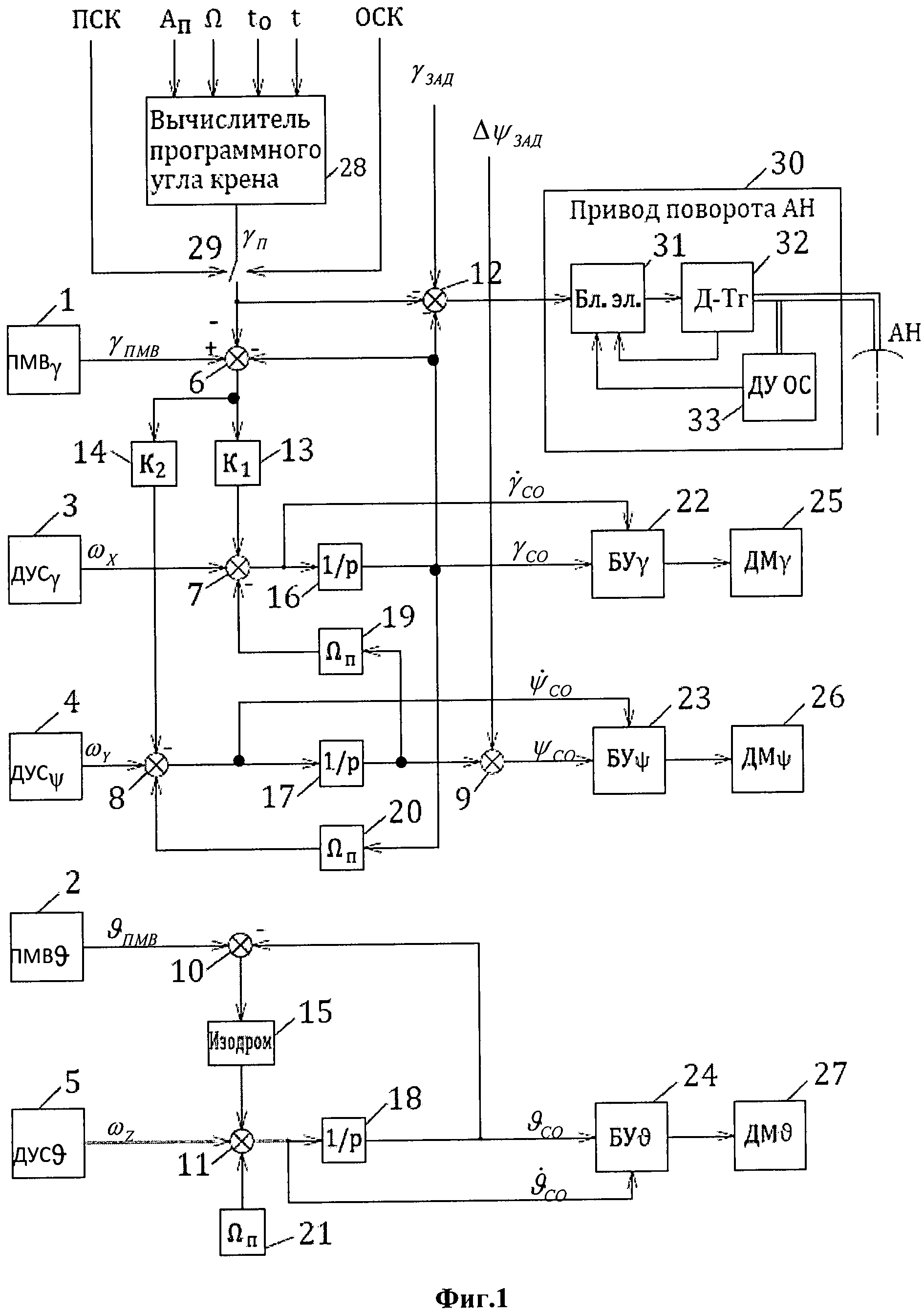
На фигуре 1 показана структурно-функциональная схема системы ориентации.
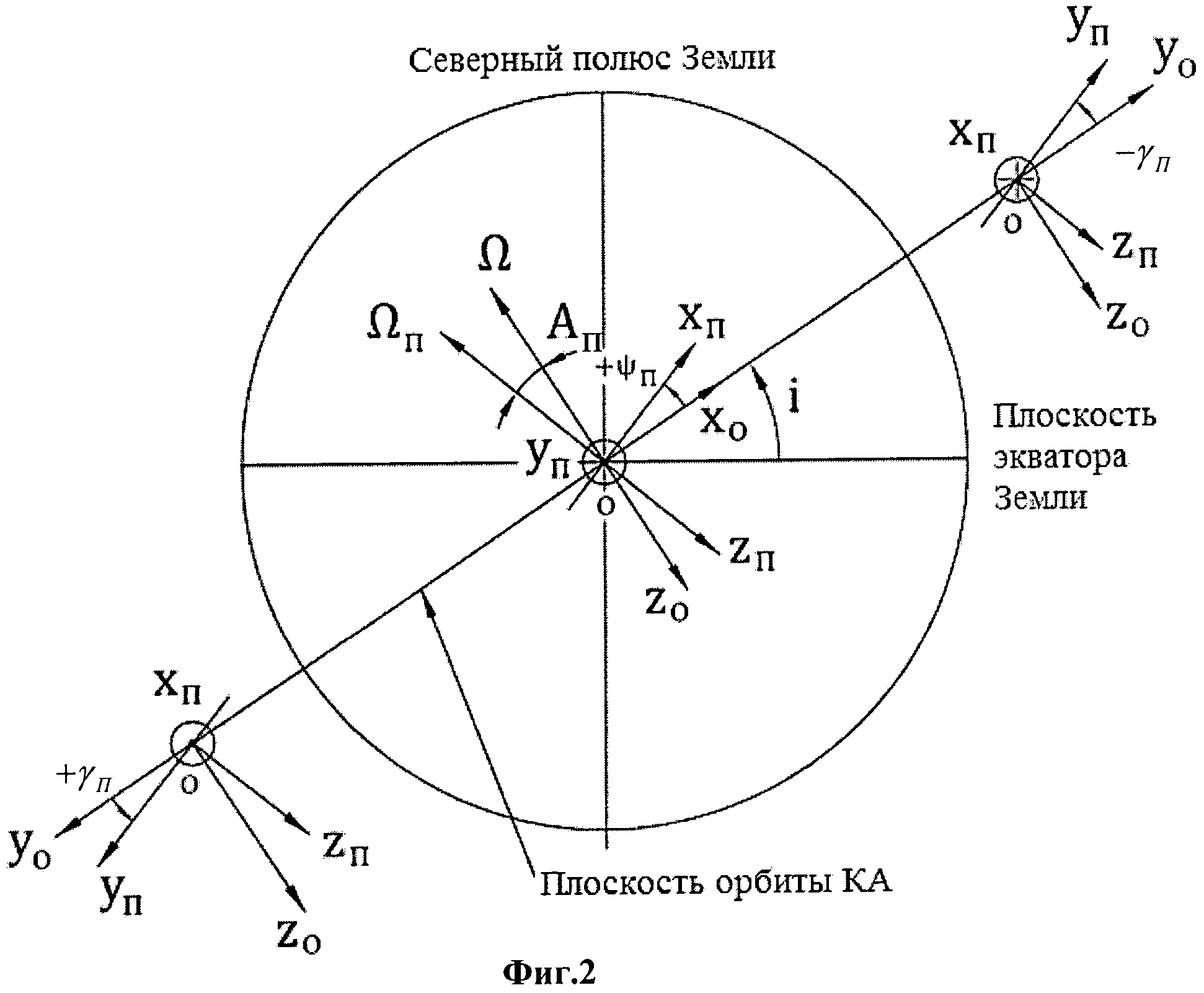
На фигуре 2 показана схема обкатки приборной системы координат в путевой плоскости относительно орбитальной плоскости движения центра масс КА.
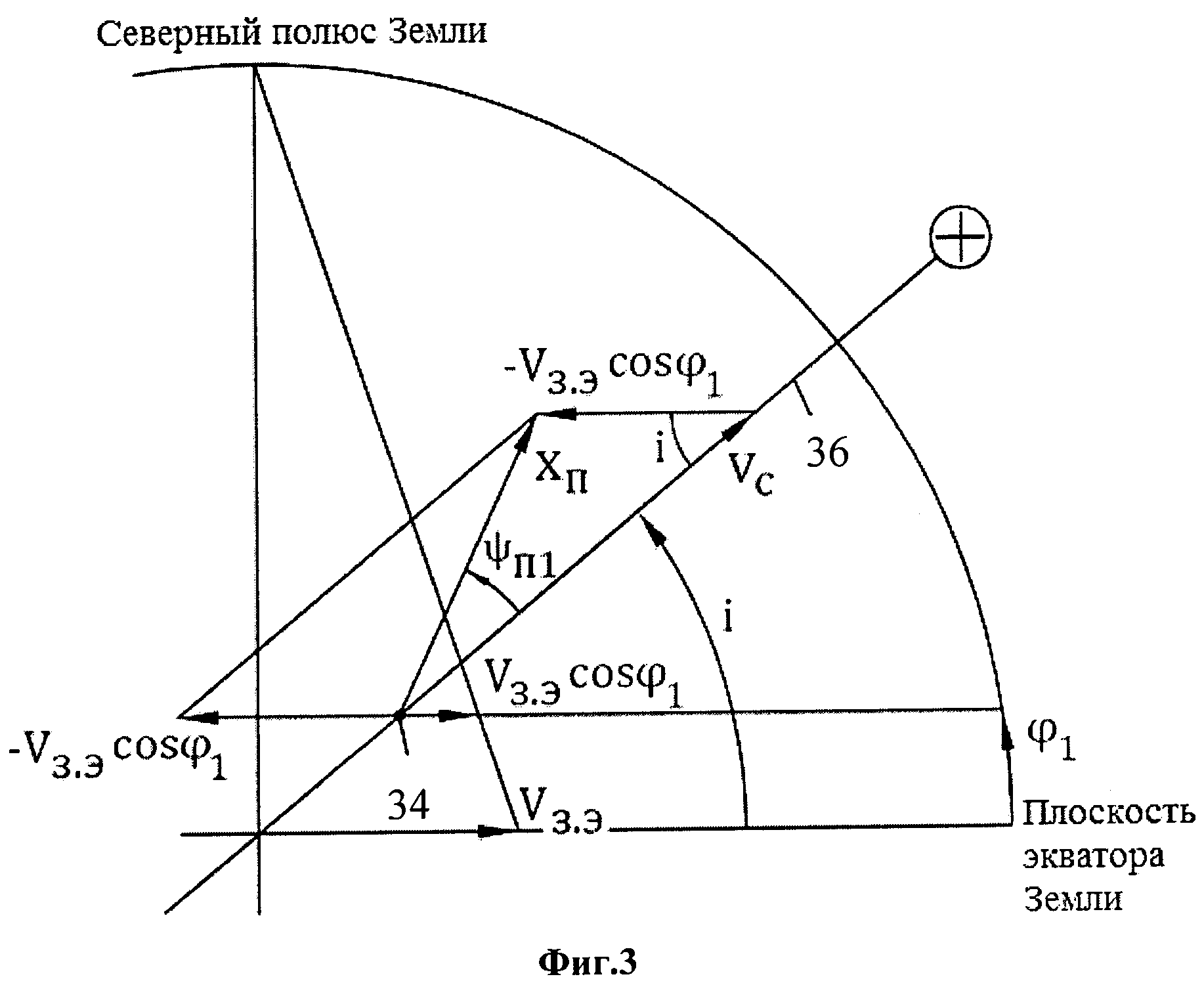
На фигуре 3 показано построение путевого угла ψП1 для подспутниковой трассы на Земле.
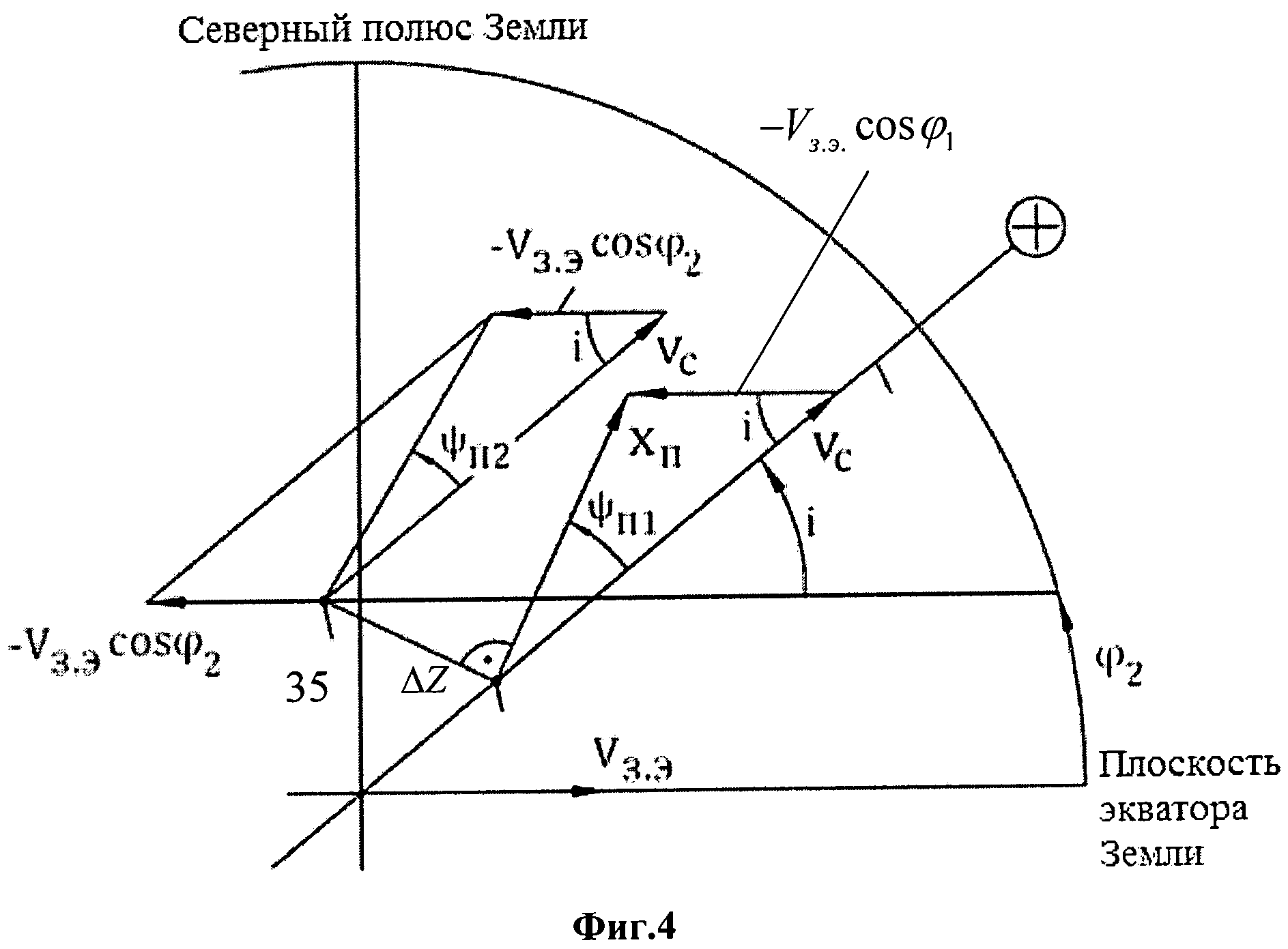
На фигуре 4 показано построение путевого угла ψП2 для трассы на Земле, пролагаемой визирной осью АН при ее повороте по крену на угол γАН относительно орбитальной плоскости.
На фигуре 1 обозначено:
1, 2 - построитель местной вертикали ПМВ по крену и курсу соответственно;
3, 4, 5 - гироскопические датчики угловых скоростей ДУС по курсу, крену и тангажу соответственно;
6, 7, 8, 9, 10, 11, 12 - сумматоры;
13, 14 - усилительно-преобразующие устройства УПУ;
15 - усилительно-преобразовательное устройство УПУ с изодромом;
16, 17, 18 - интеграторы;
19, 20, 21 - задатчики расчетного значения орбитальной угловой скорости ΩП на нормаль к приборной путевой плоскости;
22, 23, 24 - блоки управления БУ двигателей-маховиков ДМ;
25, 26, 27 - двигатели-маховики ДМ по крену, курсу и тангажу соответственно;
28 - вычислитель программного угла крена КА;
29 - коммутатор;
30 - привод поворота по крену визирной оси АН;
31 - блок электроники;
32 - двигатель тахогенератор;
33 - датчик угла обратной связи привода 30;
γCO, ψCO, ϑCO - выходные углы системы ориентации по крену, курсу и тангажу соответственно;
 ,
,  ,
,  - выходы системы ориентации по угловым скоростям каналов крена, курса и тангажа соответственно;
- выходы системы ориентации по угловым скоростям каналов крена, курса и тангажа соответственно;
ωX, ωY, ωZ - выходные угловые скорости ДУС по каналам крена, курса и тангажа соответственно;
γПМВ, ϑПМВ - выходные углы ПМВ по крену и тангажу соответственно;
- путевой угол крена;
- заданный угол поворота визирной оси АН по крену относительно ОСК;
Δψзад - поправка к курсовому путевому углу на смещение следа визирной оси от подспутниковой трассы из-за поворота визирной оси по крену γзад.
Вновь введенный вычислитель программного угла крена КА может быть выполнен в виде процессора, вычисляющего текущий программный угол крена γП=-АПsinΩП(t-t0) по внешним данным: амплитуде путевого угла АП, программной угловой скорости орбитального движения ΩП, текущему времени t и времени прохождения КА восходящего узла орбиты; ОСК, ПСК - орбитальная и путевая системы координат соответственно.
На фигуре 2 обозначено:
OX0Y0Z0 - оси текущей системы ОСК;
i - угол наклона плоскости орбиты относительно плоскости экватора Земли;
XПOYП - оси приборной путевой плоскости, в которой выполняется обкатка приборных осей ОХП и OYП относительно оси OZП, отклоненной по крену на амплитуду путевого угла АП относительно линии, проходящей через восходящий и нисходящий узлы орбиты (линии узлов орбиты);
ψП=-АПsinΩП(t-t0) - текущий путевой угол курса;
γП=-АПsinΩП(t-t0) - текущий путевой угол крена;
ΩП - программная орбитальная угловая скорость движения центра масс КА.
На фигуре 3 и 4 обозначено:
34 - проекция центра масс КА на поверхность Земли;
35 - проекция визирной оси АН на поверхность Земли при повороте КА по крену на угол γзад относительно плоскости орбиты;
36 - плоскость орбиты К А;
Δz=Н·tgγзад - боковое линейное отклонение проекции визирной оси на поверхность Земли;
VС - проекция линейной скорости КА на поверхность Земли;
VЗЭ - линейная скорость Земли на экваторе из-за ее суточного вращения;
φ1 - орбитальный угол движения КА относительно восходящего узла орбиты;
φ2 - орбитальный угол для проекции визирной оси на поверхность Земли;
ψП1 - путевой угол курса для подспутниковой трассы на поверхности Земли;
ψП2 - путевой угол курса с учетом поворота КА по крену плюс поворота визирной оси АН относительно КА.
Фигура 2 наглядно демонстрирует кинематическую обкатку по тангажу приборных осей ОХП и OYП в путевой плоскости практически с постоянной скоростью для околокруговой орбиты, и с соответствующими поворотами КА относительно ОСК с путевыми углами по курсу и крену, т.е. без приложения управляющих моментов к корпусу КА. Сохраняются лишь стабилизирующие моменты, противодействующие внешним возмущениям (гравитационные и другие моменты).
Фигура 3 наглядно демонстрирует графическое определение курсового путевого угла ψП1 для подспутниковой точки 34 на поверхности Земли из-за собственного вращения Земли VЗ.Э·cosφ1 и угла наклона i плоскости орбиты от плоскости экватора Земли.
Фигура 4 так же демонстрирует графическое определение путевого угла ψП2 для проекции 35 на поверхность Земли визирной оси АН. Место этой проекции на Земле не совпадает с местом подспутниковой точки на величину ΔZ (между точками 34 и 35) из-за поворота корпуса КА на путевой угол крена и поворота визирной оси АН относительно корпуса КА. Для точки 35 аргумент широты φ2 больше чем φ1 для точки 34 на величину, соответствующую проекции Z на местный меридиан. Соответственно проекция VЗ.Э·cosφ2 меньше проекции VЗ.Э·cosφ1 и, следовательно, путевой угол ψП2 меньше путевого угла ψП2. Величины указанных путевых углов определяются так же из косоугольных треугольников с двумя известными сторонами (VС, VЗ.Э·cosφ и одним известным углом i). Поправка Δψзад к путевому углу из-за поворота визирной оси АН по крену относительно плоскости орбиты соответствует разности углов ψП1-ψП2.
Работа системы совершается следующим образом (см. фиг.1).
В начальный период построения ОСК система ориентации работает в режиме орбитального гирокомпасирования ОГК. Выходные углы системы γCO, ψCO, ϑCO образуются путем интегрирования сигналов соответственно ДУСγ3, ДУСψ4, ДУСϑ5 с помощью интеграторов 16, 17, 18 и их коррекции с помощью элементов системы:
- по крену: ПМВγ1 - сумматор 6 - УПУ 13 - сумматор 7 - интегратор 16 - задатчик (19);
- по курсу: ПМВγ1 - сумматор 6 - УПУ 14 - сумматор 8 - интегратор 17 - задатчик 20;
- по тангажу: ПМВϑ2 - сумматор 10 - УПУ 15 - сумматор 11 интегратор 18- задатчик 21.
Угловая стабилизация КА в построенной системе координат выполняется с помощью двигателей-маховиков 25, 26, 27, управляемых блоками управления 22, 23, 24 соответственно по крену, курсу и тангажу при использовании сигналов углов γCO, ψCO, ϑCO и скоростных сигналов
,
,
системы СО.
Перед задействованием аппаратуры наблюдения наземных объектов СО переводится в режим построения ПСК. Коммутатор 29 (фигура 1) по внешней команде «ПСК» замыкается и в контуры коррекции СО по крену и курсу на сумматор 6 поступает текущий программный угол крена γП=-АПsinΩП(t-t0) из вычислителя программного угла крена 28.
В результате этого система ориентации переводит угловое движение КА со следующими новыми параметрами ориентации относительно ОСК:
- по курсу с угловым перемещением относительно ОСК, соответствующим
- путевому курсовому углу ψП=-АПcosΩП(t-t0);
- по крену с угловым перемещением относительно γП=-АПsinΩП(t-t0)
- по тангажу с угловой скоростью вращения, равной фактической орбитальной угловой скорости КА-Ω.
Это соответствует неподвижному положению приборной оси OZП относительно инерциального пространства и вращательному движению осей ОХП и OYП вокруг оси OZП в образованной приборной путевой плоскости, повернутой относительно линии узлов орбиты на угол АП. Приборная путевая плоскость так же условно неподвижна, как и орбитальная плоскость (см. фигуру 2).
Таким образом, выполнена задача построения путевого курсового угла: ψП=-АПcosΩП(t-t0).
Перед непосредственной работой аппаратуры наблюдения наземных объектов в привод поворота АН 30 задается информация через сумматор 12:
- прежний заданный угол поворота визирной оси АН относительно плоскости орбиты γзад для совмещения визирной оси с наземным объектом наблюдения, не лежащим в плоскости орбиты;
- программный угол поворота КА по крену из вычислителя 28 для учета программного поворота КА по крену γП=-АПsinΩП(t-t0);
- выходной сигнал СО по крену γCO для исключения влияния ошибки системы угловой стабилизации КА на положение визирной оси АН. Одновременно с поворотом АН по крену выполняется доворот КА по курсовому углу при отклонении визирной оси АН от плоскости орбиты.
Приведем математическое обоснование реализации приборной путевой плоскости при введении в контур коррекции СО текущего программного угла крена γП=-АПsinΩП(t-t0).
Линеаризованные уравнения системы в соответствии с фигурой 1 (без учета инструментальных погрешностей) имеют вид:


 где
где
γCO, ψCO, ϑCO - выходные углы крена, курса и тангажа ГСО;
ωX, ωY, ωZ - угловые скорости КА по крену, курсу и тангажу на выходе ДУС;
К1, К2, К3 - коэффициенты коррекции;
γПМВ, ϑПМВ - углы крена и тангажа КА на выходе ПМВ;
ΩП - программная угловая скорость орбитального движения КА, соответствующая орбитальной скорости Ω;
 - оператор дифференцирования.
- оператор дифференцирования.
γПР - программный угол (2) на выходе вычислителя программного угла крена 28: γП=-АПsinΩ(t-t0),
где АП - амплитуда путевого угла;
t0 - время прохождения КА восходящего узла орбиты.
При этом





Решение уравнений (3÷10) имеет вид:


С учетом соответствия программного угла крена выражению (2) решение уравнений (9, 10) имеют вид:


Система угловой стабилизации КА с помощью двигателей маховик ДМ 25, 26, 27 (см. фигуру 1) поворачивает КА по курсу и крену, сводя управляющие сигналы γCO и ψCO к нулевым значениям (γCO=ψCO=0), и в установившемся режиме движение КА по крену и курсу совершается в соответствии с выражениями:


При этом угловые скорости КА относительно ОСК равны:


При отработке этих углов (13, 14) с угловыми скоростями (15, 16) в ОСК КА оказывается в новой неподвижной относительно ИСК приборной плоскости, повернутой относительно линии узлов орбиты на угол равный амплитуде путевого угла АП. В этой плоскости КА вращается только по тангажу и стабилизируется в ИСК по курсу и крену. Выражения (13, 14) показывают отклонения осей крена и курса КА, находящихся в новой плоскости, относительно плоскости ОСК. Одновременно угловые скорости и ускорения КА по крену и курсу в новой плоскости нулевые. Это подтверждается выражениями для абсолютных угловых скоростей КА (6, 7), в которые подставлены выражения (13, 16) и получены результаты:

Соответствующие моменты угловой стабилизации для поворотов КА отсутствуют. Остаются лишь моменты для парирования внешних возмущений (гравитационные и другие моменты).
По каналу тангажа, практически независимо от каналов крена и курса, решение уравнения (5) без учета погрешностей сводятся к выражению:

Угол поворота антенны относительно корпуса КА рассчитывается по формуле: γАН=γзад-γП, то есть с учетом программного путевого угла КА по крену.
Таким образом, при ориентации КА в новой путевой системе координат по курсу и крену не расходуется энергия на указанные «повороты» и не происходит запаздывания в контуре угловой стабилизации.
Узел стыковки разделяемых ступеней ракет
Раскрываемое крыло двухступенчатой ракеты
Устройство для продувки и наддува приборного отсека
Космический аппарат с эталонными отражателями
Способ имитации условий минометного старта ракеты из подводной лодки и система для его осуществления
Раскрываемое крыло двухступенчатой ракеты
Раскрываемое крыло двухступенчатой ракеты
Высокотемпературный нагреватель
Устройство имитации гидроудара
Устройство для обеспечения заданного усилия натяжения регулируемой механической тяги
Узел стыковки разделяемых ступеней ракет
Раскрываемое крыло двухступенчатой ракеты
Устройство для продувки и наддува приборного отсека
Космический аппарат с эталонными отражателями
Способ имитации условий минометного старта ракеты из подводной лодки и система для его осуществления
Раскрываемое крыло двухступенчатой ракеты
Раскрываемое крыло двухступенчатой ракеты
Высокотемпературный нагреватель
Устройство имитации гидроудара
Устройство для обеспечения заданного усилия натяжения регулируемой механической тяги

