Результат интеллектуальной деятельности: СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА
Вид РИД
Изобретение
Изобретение относится к области измерения индукции магнитного поля с помощью (феррозондовых) трехкомпонентных магнитометров, в частности к прецизионным измерениям индукции.
Прецизионные измерения индукции основаны на выявлении, учете или устранении систематических (мультипликативных и аддитивных) погрешностей. Первой из доминирующих мультипликативных составляющих основной погрешности является статическая погрешность, связанная с калибровкой магнитометра. Главной из доминирующих аддитивных погрешностей является погрешность от ухода нуля магнитометра.
Известно, что угловая часть статической погрешности определяется боковыми элементами искажающей матрицей трехкомпонентного магнитометра (Г.А. Внучков и др. Угловые погрешности измерения магнитной индукции в сб. Методы и средства исследования структуры геомагнитного поля. М. ИЗМИРАН 1989 г., с.161-168). В этой работе вводится начальное, но неполное, понятие искажающей матрицы как объекта калибровки магнитометра.
Известен способ калибровки трехкомпонентного магнитометра с помощью модульного магнитометра (Scalar calibration of vector magnetometers Merayo J.M.G. a.o. Mea. Sci. Tecknol. 11(2000) 120-32). В этой работе вводится в законченном виде понятие собственной ортогональной системы координат трехкомпонентного магнитометра. Однако этот способ калибровки подвержен влиянию неоднородных, то есть индустриальных помех.
По поводу этих двух работ имела место дискуссия в печати (Comment on 'Scalar calibration of vector magnetometers' V.G. Semenov Mea. Sci. Tecknol. 14(2003) 235-237).
Известен способ определения корректирующей матрицы трехкомпонентного магнитометра с помощью трехкомпонентной меры магнитной индукции (Патент РФ №2229727, приоритет от 27 ноября 2002 г.). Этот способ также подвержен влиянию неоднородных помех. Кроме того, он не позволяет определить уходы нулей аттестуемого магнитометра. Отметим, что для полноты и завершенности калибровки требуется не только определение корректирующей матрицы, но и определение уходов нулей калибруемого магнитометра.
Известен также способ определения внешней помехи в центре меры магнитной индукции (Патент РФ №2394251, приоритет от 22 октября 2008 г.). Способ позволяет устранить влияние неоднородных помех в процессе работы меры магнитной индукции, но он не решает непосредственно задачу калибровки магнитометра.
Известен также способ определения местоположения и ориентации трехкомпонентного датчика магнитометра относительно меры магнитного момента (Патент РФ №2290657, приоритет от 09 августа 2005 г.). Этот способ позволяет также определить ориентацию одного трехкомпонентного датчика относительно другого.
По совокупности существенных признаков наиболее близким к заявляемому способу является Патент РФ №2229727, который принят здесь в качестве прототипа.
Известный способ калибровки трехкомпонентного магнитометра (Патент №2229727) включает размещение датчика аттестуемого трехкомпонентного магнитометра в центре трехкомпонентной меры магнитной индукции, компенсацию внешнего постоянного магнитного поля, поочередное воспроизведение постоянной магнитной индукции вдоль каждой полуоси меры и регистрацию ответных показаний магнитометра, по которым определяют искажающую матрицу магнитометра сначала в собственной ортогональной системе координат (COCK) меры, а затем и в COCK магнитометра, где определяют его корректирующую матрицу, как обратную искажающей.
Причиной, препятствующей получению указанного ниже технического результата при использовании известного способа является его незащищенность от внешних неоднородных (то есть зависящих не только от времени, но и от координаты) помех. Примером неоднородных помех являются помехи от линий питания электротранспорта на постоянном токе (трамвай, троллейбус, метро, пригородная электричка и т.п.). Интенсивность таких помех обратно пропорциональна квадрату расстояния до двухпроводной линии электротяги. Примером однородных помех являются вариации магнитного поля Земли, которые можно считать независящими от координаты. Поэтому известный способ реализуют в специальных загородных лабораториях, снабженных автокомпенсаторами однородных вариаций и удаленных от линий электротяги на расстояние 2-8 км.
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности определения корректирующей матрицы и уходов нулей калибруемого магнитометра за счет устранения влияния внешних магнитных помех и прежде всего неоднородных помех.
Технический результат, получаемый при осуществлении изобретения является возможность калибровки магнитометра в городских условиях, то есть вблизи источников неоднородных помех или, другими словами, при повышенных уровнях неоднородных помех.
Указанный технический результат достигается тем, что в заявляемом способе калибровки трехкомпонентного магнитометра с помощью трехкомпонентной меры магнитной индукции путем размещения датчика магнитометра в центре меры, компенсации внешнего постоянного магнитного поля, поочередного воспроизведения постоянной индукции вдоль каждой полуоси меры и регистрации ответных показаний магнитометра, по которым определяют искажающую матрицу калибруемого магнитометра сначала в собственной ортогональной системе координат (COCK) центра меры, а затем и в COCK магнитометра, в отличие от известного способа, на сфере, описанной вокруг меры, дополнительно размещают не менее 6 образцовых трехкомпонентных датчиков, для которых определяют постоянные рабочих и компенсационных обмоток меры, в показание каждого датчика вносят поправку на индукцию от меры, вычисляют среднее исправленное показание, добавляют его к значениям, воспроизводимым обмотками меры в COCK ее центра и находят искажающую калибруемого магнитометра по формуле
где uм - искажающая матрица (3×3) калибруемого магнитометра в COCK центра меры;
П=(Bu+(tk)-Bu-(tl))1(…)2(…)3 - приборная (ненормированная) матрица (3×3);
Bu+(tk)1, Bu-(tl)1 - мгновенные значения показаний калибруемого магнитометра (3×1) при воспроизведении индукции вдоль положительной и отрицательной полуоси компоненты 1 рабочих обмоток меры, аналогично для компоненты 2 и 3;
 - обратная матрица (3×3)
- обратная матрица (3×3)  ;
;
 - матрица (3×3) действительных значений индукции в центре меры в ее COCK;
- матрица (3×3) действительных значений индукции в центре меры в ее COCK;
Bc+(tk)1, Bc-(tl)1 - средние вектор-столбцы (3×1) мгновенных значений показаний образцовых датчиков в COCK центра меры при воспроизведении индукции вдоль положительной и отрицательной полуоси компоненты 1 рабочей обмотки меры, синхронных соответствующим мгновенным значениям Bu+(tk)1, Bu-(tl)1, аналогично для компоненты 2 и 3;
B0p1 - вектор-столбец (3×1) индукции, воспроизводимой компонентой 1 рабочей обмотки в центре меры в ее COCK, аналогично для компоненты 2 и 3;
Bср1 - средний вектор-столбец (3×1) индукций в точках размещения образцовых датчиков от компоненты 1 рабочей обмотки меры в ее COCK, аналогично для компоненты 2 и 3, после чего отключают рабочие обмотки меры и определяют уходы нулей калибруемого магнитометра по формуле
Bун=Bu(tk)-uм·(Bc(tk)+B0к-Bск)
где Bун - уходы нулей (3×1) калибруемого магнитометра;
Bu(tk) - измеренные мгновенные значения калибруемого магнитометра (3×1);
Bc(tk) - средний вектор-столбец (3×1) мгновенных значений показаний образцовых датчиков, синхронных соответствующим мгновенным значениям Bu(tk);
B0к - вектор-столбец (3×1) индукции, воспроизводимой обмотками компенсации в центре меры в ее COCK;
Bск - средний вектор-столбец (3×1) индукции от обмоток компенсации в точках размещения образцовых датчиков в COCK центра меры,
после чего датчик калибруемого магнитометра вынимают из меры, а каждый последующий результат измерения этим магнитометром Bu корректируют по формуле
 ,
,
где Bмаг - вектор-столбец исправленного и уточненного результата измерения в COCK магнитометра;
 - корректирующая матрица (3×3) или обратная искажающей uмаг в COCK магнитометра;
- корректирующая матрица (3×3) или обратная искажающей uмаг в COCK магнитометра;
uмаг - матрица, определяемая по заданной искажающей в COCK меры uм.
На фиг.1 изображена упрощенная схема реализации предлагаемого способа.
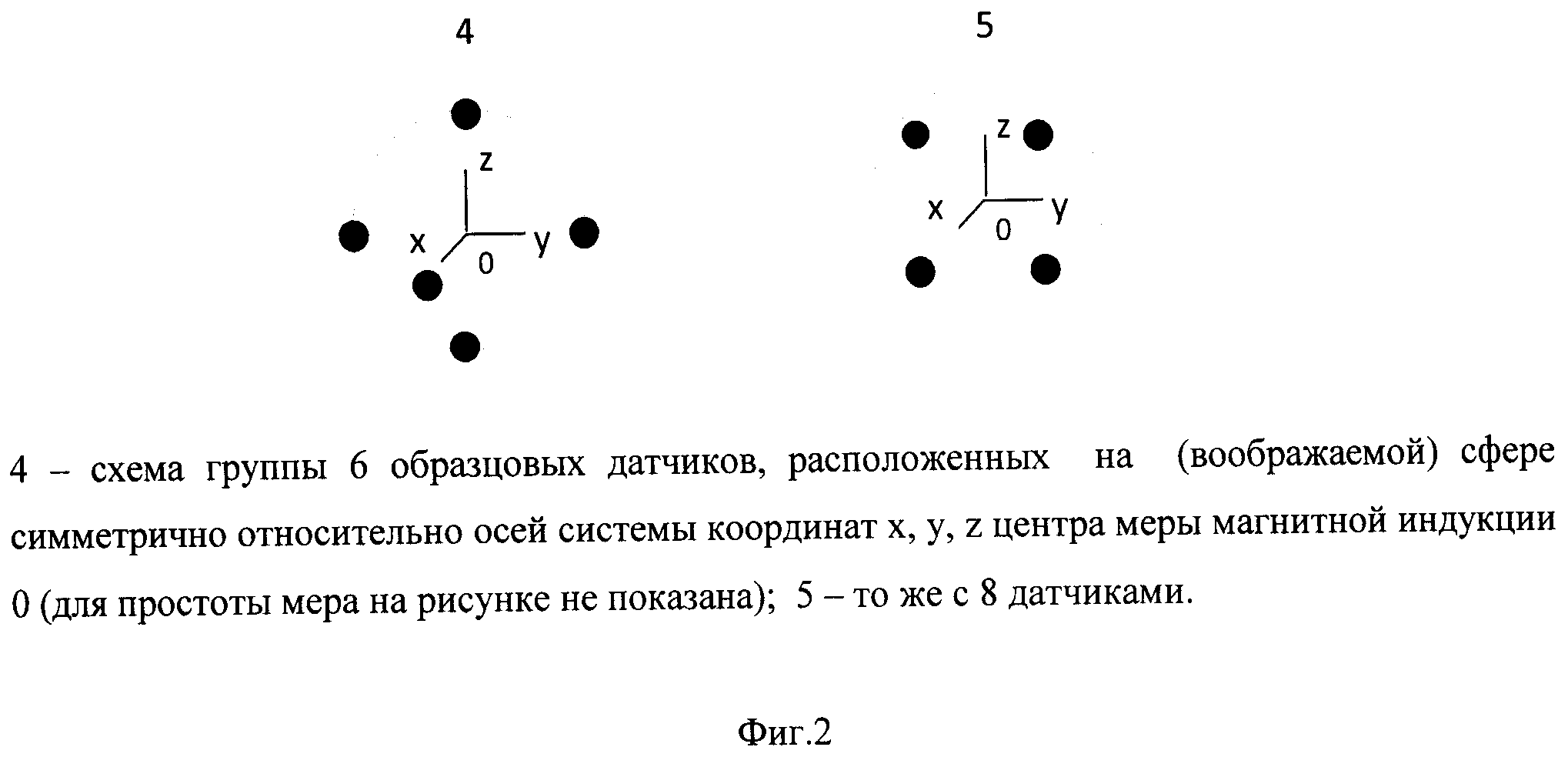
На фиг.2 изображены две группы образцовых трехкомпонентных датчиков, размещенных по сфере, описанной центра 0 вокруг меры магнитной индукции.
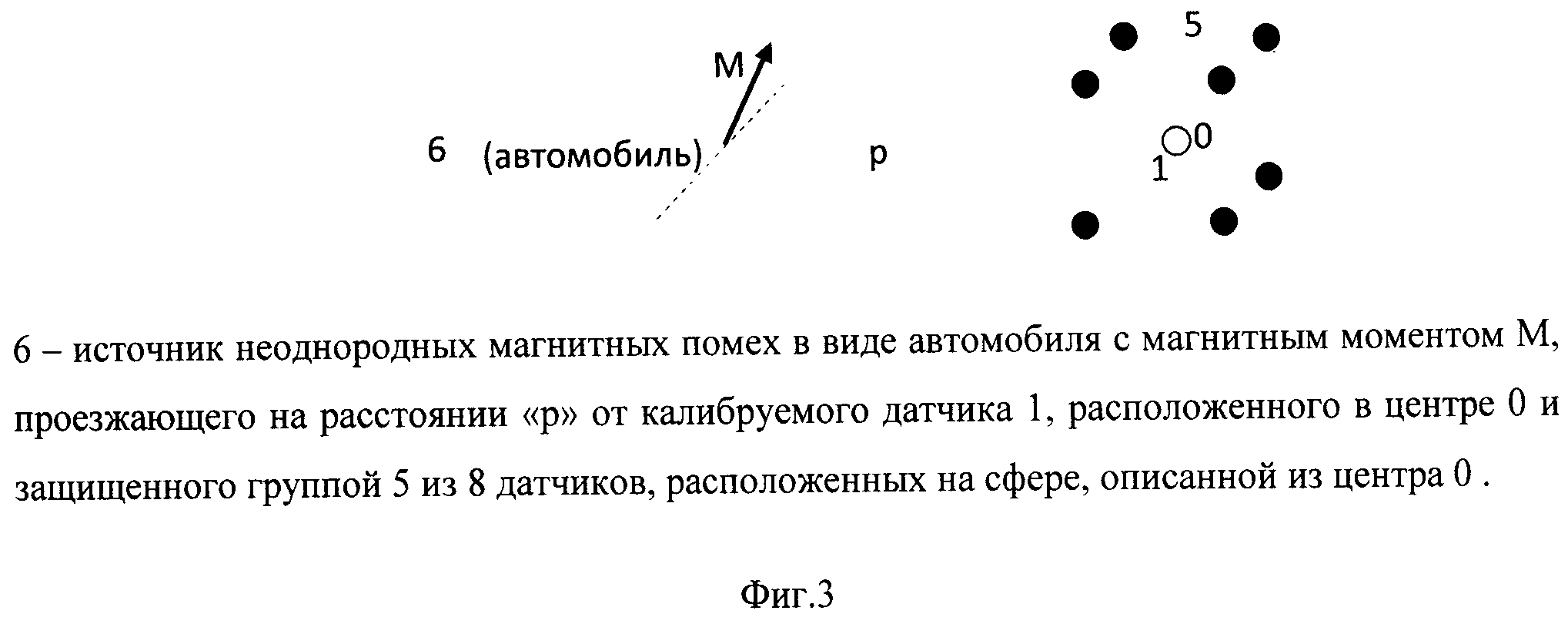
На фиг.3 и 4 изображены две схемы, иллюстрирующие защищенность предлагаемого способа от неоднородных помех, создаваемых типичными источниками помех.
Схема, изображенная на фиг.1, включает датчик 1 калибруемого трехкомпонентного магнитометра в центре трехкомпонентной меры магнитной индукции 2, и группу образцовых трехкомпонентных датчиков, размещенных на сфере 3, описанной вокруг центра меры.
Схема, изображенная на фиг.2, иллюстрирует размещение групп 4 и 5 образцовых датчиков по (воображаемой) сфере, ориентированных в системе координат xyz центра меры 0 (для простоты мера на рисунке не показана). Группа 4 состоит из 6 датчиков, группа 5 из 8 датчиков.
Схема, изображенная на фиг.3, иллюстрирует результаты расчета защищенности группой образцовых датчиков 5 калибруемого датчика 1 от магнитных помех, вызванных проезжающим автомобилем с магнитным моментом М на расстоянии «p».
Схема, изображенная на фиг.4, иллюстрирует результаты расчета защищенности группой образцовых датчиков 5 калибруемого датчика 1 от магнитных помех, вызванных токами I1, -I1, I2, -I2 двухпроводной (провод/рельс) и двухколейной линии электротяги на постоянном токе на расстоянии «p». 2z - высота токопровода над рельсами.
Заявляемый способ калибровки трехкомпонентного магнитометра основан прежде всего на следующем соотношении

где Bu - результат измерения трехкомпонентным магнитометром (три числа показаний прибора);
Bун - уходы нуля магнитометра (три числа показаний прибора в нулевом поле);
u - искажающая матрица 3×3;
B - действительное значение измеряемой индукции.
В уравнении (1) объекты u, В должны рассматриваться в одной и той же системе координат (СК), Bu, Bун не зависят от выбора СК (прибор «не знает», какую СК мы выбрали).
Согласно (1), при известных искажающей матрице и уходах нуля результат измерения можно следующим образом приблизить к действительному значению

где u-1 - корректирующая матрица магнитометра - обратная искажающей.
Уравнение (1) авторы составили в 1994 года, но они не осознали своевременно структуру искажающей матрицы. Такому осознанию помогла концепция собственной ортогональной системы координат (COCK) магнитометра, впервые предложенная, по-видимому, в статье Scalar calibration of vector magnetometers (Merayo J.M.G. a.o. Mea. Sci. Tecknol. 11(2000) 120-32). В свою очередь, этой статье недоставало понимания роли искажающей матрицы и от этого возникали проблемы (V.G. Semenov. Comment on 'Scalar calibration of vector magnetometers' Mea. Sci. Tecknol. 14(2003) 235-237). Позже понятие COCK магнитометра было расширено на меру магнитной индукции (Патент РФ №2229727) и на меру магнитного момента (Патент РФ №2290657).
Помимо соотношения (1) заявляемый способ основан также и на известной в теории (магнитного) потенциала теореме Гаусса о среднем, из которой вытекают два соотношения, полученные и рассмотренные подробно в статье «Синтез сферических методов определения параметров источников магнитного поля внутреннего и внешнего происхождения // Измерительная техника 1990 №12 С.33-35»:


где В0внш - индукция магнитного поля в центре (воображаемой) сферы 3 от произвольных источников, расположенных во внешней области сферы, Тл;
S=4πR2 - поверхность сферы радиуса R, м2;
dS - элемент поверхности сферы, м2;
B=Bвнт+Bвнш - магнитная индукция* в произвольной точке поверхности сферы с элементом dS или сумма магнитных индукций от источников магнитного поля, расположенных соответственно во внутренней и во внешней областях сферы.
Согласно (3) средняя по сфере индукция от произвольных внешних по отношению к сфере источников магнитного поля равна индукции от этих источников в центре сферы.
Согласно (4) интеграл по сфере от индукции произвольных источников внутри сферы равен нулю.
*Далее векторы магнитной индукции будут представлены вектор-столбцами 3×1 в COCK центра меры МИ (если не указано другой COCK) и обозначены нежирным шрифтом, как это принято для векторов в пакете МАТЛАБ.
Для вычисления интеграла (3) вокруг меры 2 размещают трехкомпонентные датчики, как показано крупными черными точками на фиг.2, по которым определяют приближенное значение (3)

где m=6, 8 - общее число точек с датчиками;
a - индекс точки с датчиком;
Bc - вектор-столбец среднего значения показаний всех образцовых датчиков, Тл.

где ΔBвнш - вектор-столбец погрешности определения первого члена интеграла (1) за счет ограниченного числа датчиков, Тл;
ΔBвнт - вектор-столбец погрешности определения интеграла (4) за счет ограниченного числа датчиков, Тл.
Точки 6-точечной группы 4 располагают на полуосях системы координат меры 2 на одинаковом расстоянии от центра 0, точки 8-точечной группы 5 - в вершинах куба, центр которого совпадает с центром 0, стороны которого параллельны осям системы координат меры xyz. При этом оси датчиков ориентируют вдоль осей xyz.
Затем определяют постоянные по магнитной индукции рабочих и компенсационных обмоток меры 2 в точке каждого датчика, измеряют токи обмоток меры 2 и вычисляют погрешность интеграла (4) по формуле

 - средняя матрица 3×3 постоянных по магнитной индукции рабочих обмоток меры 2, Тл/А;
- средняя матрица 3×3 постоянных по магнитной индукции рабочих обмоток меры 2, Тл/А;
C1ра C2pa C3ра - вектор-столбцы постоянных по магнитной индукции в точке а компонент 1, 2, 3 рабочих обмоток меры 2, Тл/А;
 - вектор-столбец токов компонент 1, 2, 3 рабочих обмоток меры 2, А;
- вектор-столбец токов компонент 1, 2, 3 рабочих обмоток меры 2, А;
 - средняя матрица постоянных по магнитной индукции обмоток компенсации меры 2, Тл/А;
- средняя матрица постоянных по магнитной индукции обмоток компенсации меры 2, Тл/А;
C1ка C2ка C3ка - вектор-столбцы постоянных по магнитной индукции в точке а компонент 1, 2, 3 обмоток компенсации меры 2, Тл/А;
 - вектор-столбец токов компонент 1, 2, 3 обмоток компенсации компонент меры 2, Тл;
- вектор-столбец токов компонент 1, 2, 3 обмоток компенсации компонент меры 2, Тл;
Bср - вектор-столбец средней (постоянной) индукции от рабочих обмоток меры 2, Тл;
Bск - вектор-столбец средней (постоянной) индукции от обмоток компенсации меры 2, Тл;
С помощью соотношений (4) и (5) определяют искомую внешнюю помеху по формуле

Как будет показано ниже, заявляемый способ в большинстве случаев позволяет пренебречь погрешностью ΔBвнш, поэтому (8) упрощают до вида

Далее различают положительную и отрицательную полярность постоянных токов рабочих обмоток Iр+, Iр- таких, что Iр+=-Iр-, мгновенные значения индукции и разность мгновенных значений

где Bc+(t), Bвнш+(t) - мгновенные значения индукции при Iр+;
Bc-(t), Bвнш-(t) - мгновенные значения индукции при Iр-;
B0внш+(tk) - мгновенное значение в момент tk при Iр+;
B0внш-(tl) - мгновенное значение в момент tl при Iр-.
Далее добавляют к (10) принципиально известную постоянную В0р

где B0р - вектор-столбец индукции, созданной компонентой рабочих обмоток меры 2 в центре 0, Тл.
Соотношение (11) представляет собой действительные мгновенные значения суммарной индукции магнитного поля в центре 0 от внешних и внутренних (по отношению к сфере 3) источников магнитного поля. Члены справа в (11) принципиально известны как результаты измерения образцовыми (точными) магнитометрами на сфере 3 и результаты воспроизведения магнитной индукции мерой 2 в точках центра и сферы 3. При этом результаты измерения и воспроизведения приводят к единой СК, например к COCK меры 2 в ее центре.
Через (1) и (11) выражают разность результатов измерения (калибруемым) датчиком 1 в центре 0

где Bu+(tk), Bu-(tl) - измеренные мгновенные значения, синхронные соответствующим Bc+(tk), Bc-(tl), Тл.
Эта разность известна независимо от (неизвестных) уходов нулей Bун калибруемого магнитометра 1. Однако (12) не позволяет определить искомую матрицу u, так как на вектор делить нельзя. Но можно делить на (обратную) матрицу. Поэтому (11) и (12) сводят к матрицам: действительных значений  и соответствующей приборной П
и соответствующей приборной П


где индексы 1, 2, 3 обозначают поочередные воздействия вдоль полуосей компонент 1, 2, 3 рабочих обмоток меры, например B0р1, B0р2, B0р3 и т.п.
Из (14) определяют искомую искажающую матрицу калибруемого магнитометра 1 в той СК, в которой задано  . Например
. Например

где uм, B0м - искажающая матрица и матрица действительных значений в COCK центра 0 меры 2;
 - обратная В0м.
- обратная В0м.
Элементы матрицы uм дополнительно уточняют путем многократного повторения и усреднения вышеописанных операций.
По найденной искажающей uм определяют ее инварианты: длины li и неортогональности φij магниточувствительных осей i, j=1, 2, 3 i≠j калибруемого магнитометра 1

По определенным в (16) инвариантам строят искажающую uмаг, калибруемого магнитометра в COCK магнитометра. Например,

где 
Инварианты (16) и искажающую (17) заносят в паспорт магнитометра и хранят эти данные до следующей калибровки его.
Уходы нулей калибруемого магнитометра определяют при отключенных рабочих обмотках по формуле
Bун=Bu(tk)-uм·(Bc(tk)+B0К-BсК)
где Вун - уходы нулей (3×1) калибруемого магнитометра;
Bu(tk) - измеренные мгновенные значения калибруемого магнитометра (3×1);
Bc(tk) - средний вектор-столбец (3×1) мгновенных значений показаний образцовых датчиков, синхронных соответствующим мгновенным значениям Bu(tk);
B0К - вектор-столбец (3×1) индукции, воспроизводимой обмотками компенсации в центре меры в ее COCK;
ВсК - средний вектор-столбец (3×1) индукций в точках размещения образцовых датчиков от обмоток компенсации меры в ее COCK.
Значения уходов Bун дополнительно уточняют путем многократного повторения и усреднения вышеописанной операции, после чего датчик калибруемого магнитометра вынимают из меры, а каждый последующий результат измерения этим магнитометром Bu корректируют по формуле
 ,
,
где Bмаг - вектор-столбец исправленного и уточненного результата измерения в COCK магнитометра;
 - корректирующая матрица (3×3) или обратная искажающей uмаг в COCK магнитометра;
- корректирующая матрица (3×3) или обратная искажающей uмаг в COCK магнитометра;
uмаг - матрица, определяемая по заданной искажающей в COCK меры uм.
Для проверки заявляемого способа проведено его компьютерное моделирование (КМ) с помощью пакета МатЛаб в условиях воздействия неоднородных помех от типичных источников таких помех, схематически показанных на фиг 3 и 4. На некотором расстоянии от образцовых и калибруемого датчиков проезжает автомобиль (фиг.3), создающий для датчиков неоднородные магнитные помехи. Автомобиль можно аппроксимировать точечным диполем с некоторым магнитным моментом из расчета 30 нТл на расстоянии в 10 м (Р.Б. Семевский и др. Специальная магнитометрия. СПб Наука 2002. С.38). При КМ автомобильных помех компоненты момента принимались за случайные величины с нулевым средним и СКО равным 300 Ам2. При КМ помех от двухпроводной линии транспорта на электротяге (фиг.4) суммарный ток обоих проводов, умноженный на высоту токопровода над рельсом, принимался за случайную величину с нулевым средним и СКО равным 105 Ам. Размер СКО выбран из анализа экспериментальных данных (К.К. Барахнин и др. Анализ квантового автокомпенсатора вариаций магнитного поля Земли. Труды метрологических институтов. 1976 вып.215(275) с.24-26) и также из анализа экспериментальных данных авторов заявляемого способа. Результаты КМ заявляемого способа для 8 образцовых датчиков на сфере радиуса 1 м приведены в таблицах ниже. Для сравнения в таблицах добавлены результаты для одного образцового датчика, предполагаемого на сфере того же радиуса (на фиг.3 и 4 он не показан). Результаты представлены в зависимости от расстояния «p» источника неоднородных помех от центра сферы 0.
|
|
Данные таблиц показывают, что заявляемый способ (8 точ.) обеспечивает высокую точность калибровки независимо от уровня помех, или при всех расстояниях до их источников, за исключением случая p=5 м для схемы на фиг.3. В сравнении с одноточечным вариантом, заявляемый способ дает значительный выигрыш по точности, особенно вблизи от источников помех, то есть при высоких уровнях неоднородных помех. При больших расстояниях уровни неоднородных помех резко снижаются и точность одноточечного варианта приближается к заявляемому способу. По прототипу (Патент №2229727) калибровку магнитометров проводят в загородных лабораториях, удаленных от линий электротранспорта на расстояние порядка 2 км. Из данных таблицы 2 следует, что заявляемый способ позволяет уменьшить рабочее расстояние в 2000/50=40 раз, то есть, работать в черте города, вблизи от линий питания электротранспорта (пригородные электрички, метро, трамваи, троллейбусы), а также вблизи от автомобильных дорог (см. Таблицу 1). Кроме того, благодаря своему быстродействию, заявляемый способ позволяет повысить точность за счет усреднения большого числа измерений. Например, всего за 1 с он дает возможность сделать около 1000 измерений искажающей матрицы калибруемого магнитометра, при усреднении СКО среднего снижается в  раза по сравнению с СКО, приведенными в таблице.
раза по сравнению с СКО, приведенными в таблице.
В заключение рассмотрим кратко некоторые вопросы настройки устройства, которым реализуют предлагаемый способ. «Кратко» и «некоторые» потому, что эти вопросы относятся к калибровке не магнитометра, а меры магнитной индукции. Более подробно они рассмотрены в описании патентов РФ (№2229727, №2394251 и №2290657).
Настройку устройства для реализации предлагаемого способа проводят в условиях отсутствия сильных неоднородных помех. Такие кратковременные периоды имеют место почти каждую ночь, когда на несколько часов отключают питание городского электротранспорта, в том числе питание пригородных электричек, и на 40-90 мин отключают линии питания поездов метро для профилактических осмотров.
Предварительно в загородной лаборатории с низким уровнем промышленных помех у каждого образцового магнитометра определяют его искажающую/корректирующую матрицу в его COCK по известному способу (Патент РФ №2229727), а также его уходы нулей, например в электромагнитном экране. Затем каждый образцовый магнитометр устанавливают в заданную рабочую точку сферы 3 и приблизительно ориентируют его оси вдоль осей меры магнитной индукции 2. При этом вместо калибруемого магнитометра 1 в центре меры 2 временно устанавливают вспомогательный образцовый магнитометр. После установки и приблизительной ориентации каждого магнитометра определяют постоянные меры по магнитной индукции для каждой точки в COCK магнитометра этой точки (Патент №2394251), а также матрицу ортогонального преобразования координат между COCK магнитометра и COCK меры по способу (Патент РФ №2229727). Затем с помощью внешней трехкомпонентной меры магнитного момента по способу (Патент РФ №2290657) определяют матрицы ортогонального преобразования координат между COCK меры магнитного момента и COCK каждого образцового магнитометра, а также между COCK каждого магнитометра и COCK магнитометра в центре меры. С помощью полученных матриц находят также аналогичные матрицы между COCK каждой точки меры и COCK ее центра все частные результаты, заданные в соответствующих частных COCK, приводят к COCK центра меры.
Способ калибровки трехкомпонентного магнитометра с помощью трехкомпонентной меры магнитной индукции путем размещения датчика магнитометра в центре меры, компенсации внешнего постоянного магнитного поля, поочередного воспроизведения постоянной индукции вдоль каждой полуоси меры и регистрации ответных показаний магнитометра, по которым определяют искажающую матрицу калибруемого магнитометра сначала в собственной ортогональной системе координат (COCK) центра меры, а затем и в COCK магнитометра, отличающийся тем, что на сфере, описанной вокруг меры, дополнительно размещают не менее 6 образцовых трехкомпонентных датчиков, для которых определяют постоянные рабочих и компенсационных обмоток меры, в показание каждого датчика вносят поправку на индукцию от меры, вычисляют среднее исправленное показание, добавляют его к значениям, воспроизводимым обмотками меры в COCK ее центра, и находят искажающую калибруемого магнитометра по формуле: где u - искажающая матрица (3×3) калибруемого магнитометра в COCK центра меры;П=(B(t)-B(t))(…)(…) - приборная (ненормированная) матрица (3×3);B(t), B(t) - мгновенные значения показаний калибруемого магнитометра (3x1) при воспроизведении индукции вдоль положительной и отрицательной полуоси компоненты 1 рабочих обмоток меры, аналогично для компоненты 2 и 3; - обратная матрица (3×3) ; =(B(t)-В(t)+2B-2B)(…)(…) - матрица (3×3) действительных значений индукции в центре меры в ее COCK;B(t), В(t) - средние вектор-столбцы (3×1) мгновенных значений показаний образцовых датчиков в COCK центра меры при воспроизведении индукции вдоль положительной и отрицательной полуоси компоненты 1 рабочей обмотки меры, синхронных соответствующим мгновенным значениям B(t), B(t) , аналогично для компоненты 2 и 3;B - вектор-столбец (3×1) индукции, воспроизводимой компонентой 1 рабочей обмотки в центре меры в ее COCK, аналогично для компоненты 2 и 3;В - средний вектор-столбец (3×1) индукций в точках размещения образцовых датчиков от компоненты 1 рабочей обмотки меры в ее COCK, аналогично для компоненты 2 и 3,после чего отключают рабочие обмотки меры и определяют уходы нулей калибруемого магнитометра по формуле:B=B(t)-u·(B(t)+B-B),где B - уходы нулей (3×1) калибруемого магнитометра;B(t) - измеренные мгновенные значения калибруемого магнитометра (3×1);B(t) - средний вектор-столбец (3×1) мгновенных значений показаний образцовых датчиков, синхронных соответствующим мгновенным значениям B(t);В - вектор-столбец (3×1) индукции, воспроизводимой обмотками компенсации в центре меры в ее COCK;В - средний вектор-столбец (3×1) индукции от обмоток компенсации в точках размещения образцовых датчиков в COCK центра меры, после чего датчик калибруемого магнитометра вынимают из меры, а каждый последующий результат измерения этим магнитометром В корректируют по формуле: где B - вектор-столбец исправленного и уточненного результата измерения в COCK магнитометра; - корректирующая матрица (3×3) или обратная искажающей u в COCK магнитометра;u - матрица, определяемая по заданной искажающей в COCK меры u.



Способ поверки магнитоизмерительных приборов
Способ определения влагосодержания воздуха
Способ локализации источника магнитного поля дипольной модели
Экструдер для переработки термопластичных материалов
Способ контроля уровня безопасности морской перевозки разжижающихся навалочных грузов
Способ определения влагосодержания газов
Способ предотвращения возгорания навалочного груза
Способ инерциально-спутникового позиционирования подвижных объектов
Способ и устройство для определения октановых чисел автомобильных бензинов
Способ управления работой двигателя внутреннего сгорания и система для его осуществления
Способ поверки магнитоизмерительных приборов
Способ определения влагосодержания воздуха
Способ локализации источника магнитного поля дипольной модели
Экструдер для переработки термопластичных материалов
Способ контроля уровня безопасности морской перевозки разжижающихся навалочных грузов
Способ определения влагосодержания газов
Способ предотвращения возгорания навалочного груза
Способ инерциально-спутникового позиционирования подвижных объектов
Способ и устройство для определения октановых чисел автомобильных бензинов
Способ управления работой двигателя внутреннего сгорания и система для его осуществления

