Результат интеллектуальной деятельности: СИСТЕМА ОТСЛЕЖИВАНИЯ ДЕНТАЛЬНОГО ПОЛОЖЕНИЯ ДЛЯ ЗУБНОЙ ЩЕТКИ
Вид РИД
Изобретение
Настоящее изобретение относится, в общем, к системам, которые отслеживают положение зубной щетки во рту относительно области или областей зубов (дентальных зон) во время чистки щеткой, и, в частности, относится к такой системе, которая учитывает перемещение головы во время чистки щеткой.
Обратная связь в реальном времени, когда пользователь чистит свои зубы, является желательной возможностью зубной щетки. Одна важная часть информации, имеющей отношение к промежутку времени, в течение которого зубную щетку применяют в разных дентальных положениях или зонах, т.е. конкретных областях зубов, включающих в себя несколько соседних зубов. Упомянутая информация помогает пользователю определять качество чистки щеткой для каждой дентальной зоны. Пользователи могли бы таким образом определять, например, достаточно ли или чрезмерно они выполняют чистку по времени для каждой дентальной зоны.
Один известный метод получения упомянутой информации содержит определение ориентации зубной щетки в то время, когда пользователь чистит щеткой свои зубы и, затем, сопоставление данной ориентационной информации с различными предварительно выбранными дентальными зонами, поскольку ориентация зубной щетки будет изменяться известным образом в зависимости от конкретной области или дентальной зоны, подвергаемой чистке, например, зубная щетка будет ориентирована по-разному, в зависимости от того, находятся ли зубы, подвергаемые чистке, на нижней или верхней челюсти, и является ли конкретная поверхность, подвергаемая чистке, внешней, внутренней или жевательной поверхностью. Зубная щетка, содержащая смонтированные на ней акселерометрические и магнитометрические датчики, способна вырабатывать упомянутую ориентационную информацию. Подобная система описана в публикации WO 2006/1378648A1. Акселерометры служат для измерения гравитационной силы, тогда как магнитометры измеряют магнитные поля земли. С использованием упомянутой информации можно определить ориентационную информацию зубной щетки относительно земли (в привязанной к земле системе координат).
Однако, при описанном подходе, существует значительная проблема, состоящая, по существу, в том, что пользователь должен держать свою голову спокойно во время чистки щеткой. Определения дентальных зон выполняются с учетом того, что голова удерживается в конкретной известной ориентации. Если ориентация головы значительно изменяется (голова двигается/поворачивается) во время чистки щеткой в данной зоне, то измеренные ориентации будут соответственно изменяться для данной зоны, и эти вновь измеренные ориентации больше не могут соответствовать зафиксированным «целевым» ориентациям зубной щетки для данной дентальной области. Следовательно, дентальную область невозможно распознать, или дентальную область можно неверно идентифицировать. Значительные движения головы во время двухминутного интервала чистки щеткой очень обычны. Одно решение заключается в измерении изменений ориентации головы с использованием опорного датчика на голове пользователя, который имеет фиксированную ориентацию относительно головы пользователя.
Изменения целевых ориентаций могут выполняться соответственно. Однако использование отдельного датчика на голове пользователя неудобно, привносит дополнительные расходы и вряд ли подходит для постоянного применения.
Следовательно, существует потребность в системе отслеживания дентального положения, которая содержит получение информации об ориентации зубной щетки с помощью акселерометров и магнитометров, но которая содержит также возможность точного учета движения головы во время чистки щеткой, без нужды в отдельном датчике.
Соответственно, предлагается система отслеживания дентального положения для зубной щетки, которая компенсирует движение головы во время чистки щеткой, при этом система содержит зубную щетку, которая содержит систему для определения ориентации зубной щетки во рту пользователя; сохраненную целевую информацию для ориентации зубной щетки для каждой из множества выбранных дентальных зон; систему обработки для сравнения информации об ориентации зубной щетки с целевой ориентационной информацией после того, как информация об ориентации зубной щетки и целевая ориентационная информация оказываются в одной системе координат, и определения целевой информации, если таковая имеется, которая согласуется, в пределах выбранного допуска, с информацией об ориентации зубной щетки; систему компенсации, которая генерирует исправленную целевую информацию для дентальных зон на основании разностей между информацией об ориентации зубной щетки и предшествующей целевой информацией; и информационную систему, реагирующую на систему обработки, для представления пользователю информации обратной связи, имеющей отношение к чистке щеткой в выбранных дентальных зонах.
Кроме того, предлагается способ отслеживания дентального положения для зубной щетки, который компенсирует движение головы во время чистки щеткой, при этом, упомянутый способ содержит этапы, на которых: определяют ориентацию зубной щетки во рту пользователя; сохраняют целевую информацию для ориентации зубной щетки для каждой из множества выбранных дентальных зон; сравнивают информацию об ориентации зубной щетки с целевой ориентационной информацией после того, как информация об ориентации зубной щетки и целевая ориентационная информация оказываются в одной системе координат, и определяют целевую информацию, если таковая имеется, которая согласуется, в пределах выбранного допуска, с информацией об ориентации зубной щетки; исправляют целевую информацию для дентальных зон на основании разностей между информацией об ориентации зубной щетки и предшествующей целевой информацией; и представляют пользователю информацию обратной связи, имеющую отношение к чистке щеткой в выбранных дентальных зонах.
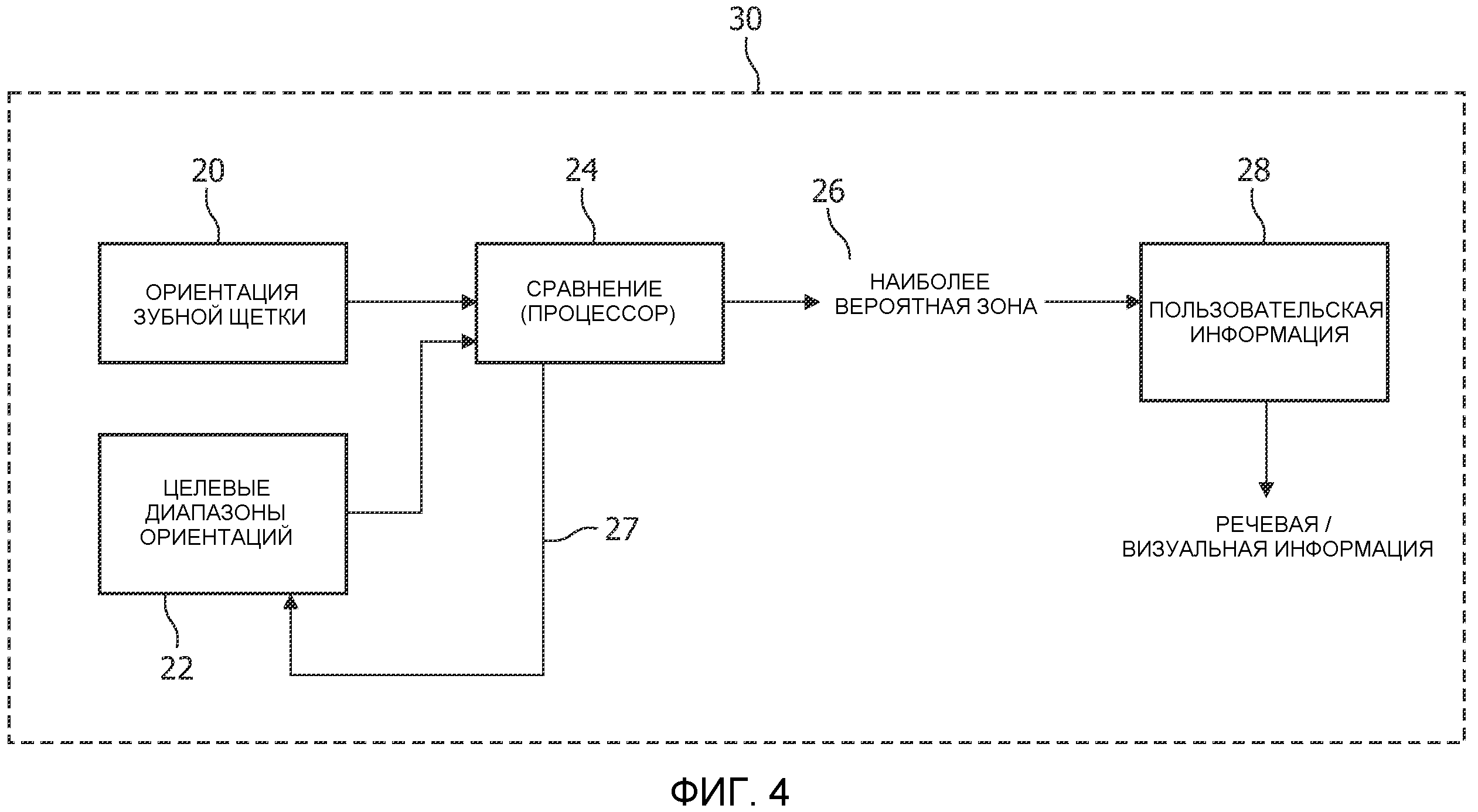
Фиг.1 - вид в перспективе зубной щетки и системы координат относительно зубной щетки.
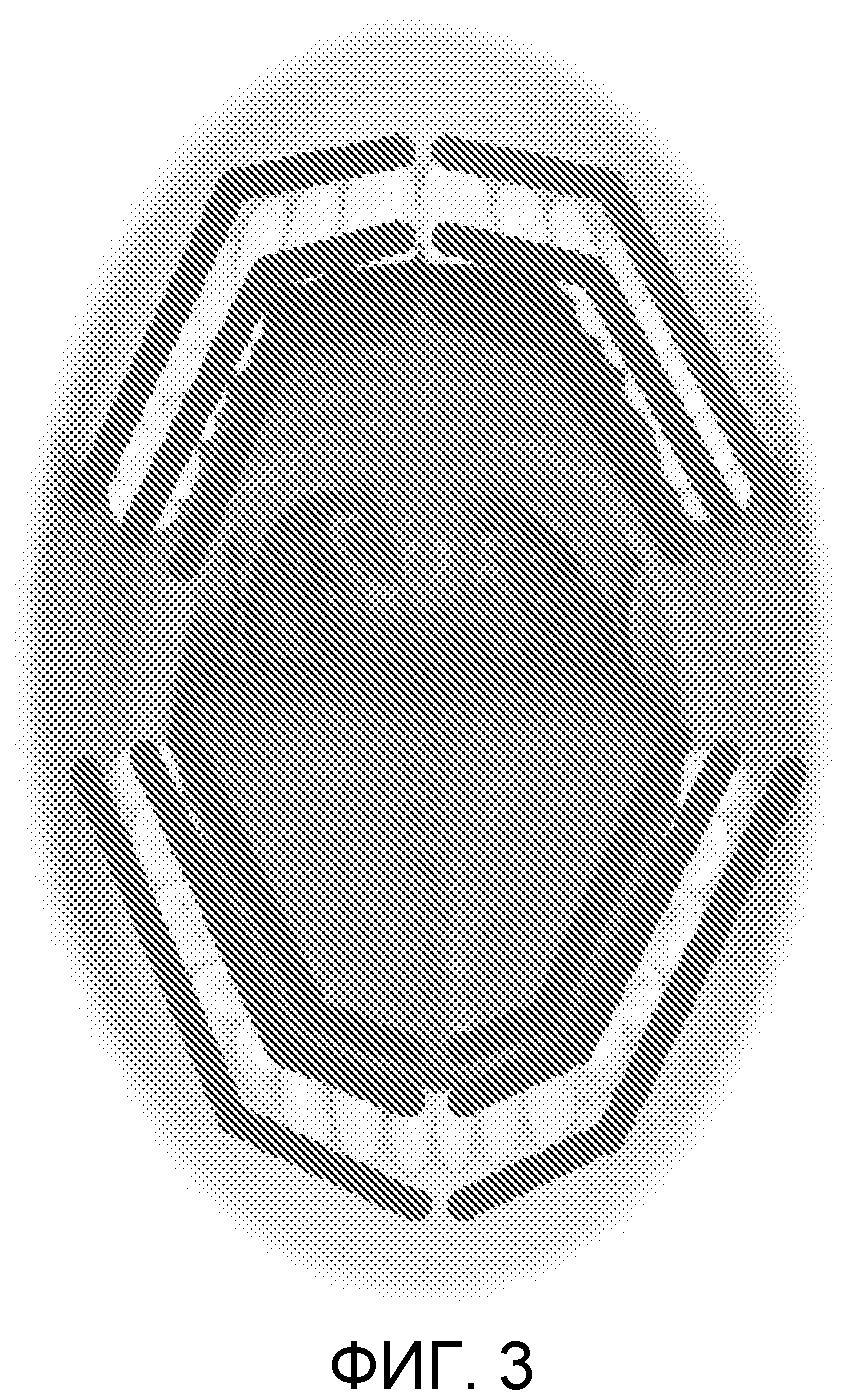
Фиг.2 - вид сбоку головы пользователя и системы координат относительно головы пользователя.
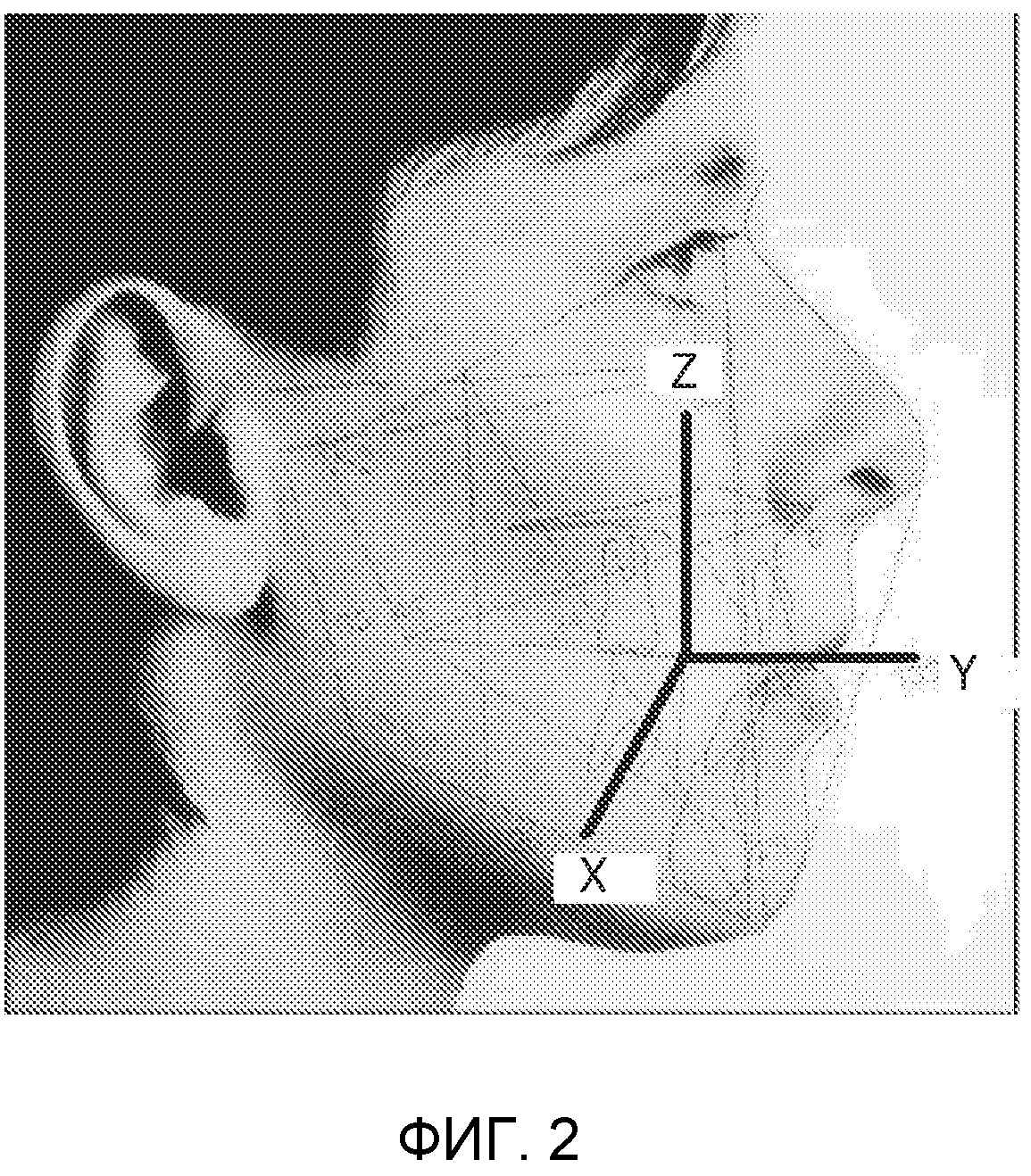
Фиг.3 - вид дентальных зон во рту пользователя.
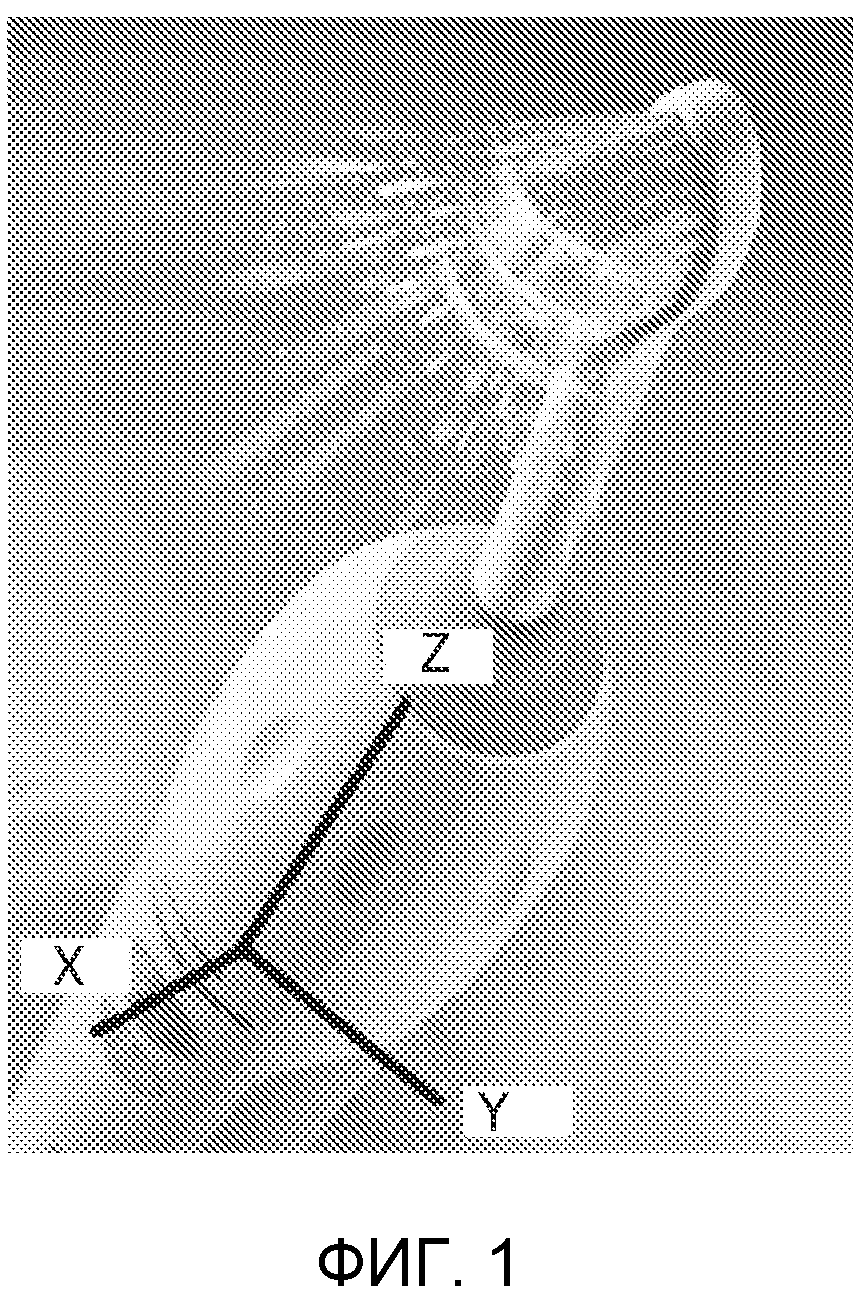
Фиг.4 - схема системы, представляющая обработку для обеспечения отслеживания дентальных зон.
В настоящей системе, информацию об ориентации зубной щетки (во рту) получают в привязанной к земле системе координат с помощью акселерометрических и магнитометрических датчиков аналогично тому, как описано в публикации '648, или другим традиционным общеизвестным способом. Данная ориентационная информация, называемая информацией об измеренной ориентации зубной щетки, используется также в настоящей системе для определения изменений положения головы пользователя (поворота) посредством отслеживания разностей между измеренными ориентациями и предварительно установленными фиксированными целевыми ориентациями для дентальных зон, при этом, упомянутые разности вызываются движением головы. Это дает возможность системе точно идентифицировать дентальные области, в которых находится зубная щетка, даже когда пользователь двигает своей головой. Затем получают точное время информации о чистке щеткой для каждой дентальной зоны/области.
Система отслеживания положения дентальной зоны сначала требует идентификации числа дентальных зон во рту, например, зоны можно разделить соответственно челюстям (верхняя/нижняя), поверхностям зубов (внешняя поверхность, жевательная поверхность, внутренняя поверхность) и конкретным половинам челюстей (правая/левая). Приведенное разбиение представлено на фиг.3. Следовательно, данная конкретная схема расположения делит рот на двенадцать разных дентальных зон или областей, например, одна зона/область может охватывать внешние поверхности зубов в левой половине нижней челюсти. Можно использовать меньшие или большие числа зон. Для большего числа зон, зубы в передней части челюсти можно отличать от зубов в задней части челюсти. Основной учитываемый фактор при отслеживании дентального положения заключается в том, что каждая из дентальных зон имеет диапазон известных, связанных с ней правильных ориентаций зубной щетки, называемых целевыми ориентациями, при условии, что голова находится в конкретном положении. Упомянутые целевые диапазоны определяются в привязанной к голове системе координат, а измеренные ориентации зубной щетки, вычисляемые из данных акселерометрических и магнитометрических датчиков, определяются в привязанной к земле системе координат. Сравнения выполняют, когда целевые диапазоны ориентаций и измеренные ориентации выражены в одной и той же системе координат. Если измеренная ориентация зубной щетки находится в пределах одного из целевых диапазонов, то следует вывод, что пользователь чистит свои зубы в дентальной зоне, содержащей упомянутый целевой диапазон. Затем можно отследить время, уделенное каждой дентальной зоне, и данную информацию можно представлять пользователю для подтверждения или модификации навыков чистки щеткой. Кроме того, возможно обеспечение в реальном времени информации о том, сколько еще времени следует употребить на каждую зону.
Целевой диапазон ориентаций для каждого дентального положения содержит один размер, который соответствует идеальным ориентациям внутри зоны, а также два ортогональных размера, которые указывают допускаемое отклонение ориентаций относительно идеальной целевой ориентации.
Целевые диапазоны для каждой дентальной зоны сохраняются в памяти в зубной щетке. Как указано выше, целевые диапазоны ориентаций определяются в привязанной к голове системе координат, а измеренные ориентации зубной щетки, которые определяются из данных акселерометрических и магнитометрических датчиков, представляются в привязанной к земле системе координат. Сравнение упомянутых диапазонов с измеренными ориентациями для определения дентальной зоны требует, чтобы те и другие были выражены в одной и той же системе координат. Объем вычислений для преобразования целевого диапазона ориентаций в привязанную к земле систему координат меньше, чем наоборот, хотя, в альтернативном варианте, измеренные ориентации можно преобразовывать в привязанную к голове систему координат для сравнения.
Для коррекции с учетом изменений положения головы во время чистки щеткой выполняется непрерывное преобразование информации об ориентации целевого диапазона в привязанную к земле систему координат. В настоящей системе, упомянутое преобразование выполняется в два этапа, при этом, учитываются изменения положения (поворота) головы во время чистки щеткой, чтобы точно идентифицировать подвергаемую чистке дентальную зону. На первом этапе, устанавливается исходное положение головы в момент, когда пользователь начинает сеанс чистки щеткой. Исходное положение головы можно определить очень точно, если только известна исходная ориентация зубной щетки в привязанной к голове системе координат. Знание исходной ориентации зубной щетки в привязанной к голове системе координат во время измерения ориентации зубной щетки в привязанной к земле системе координат позволяет определить исходное положение головы. Однако, на практике, возможно, достаточно знать только исходную дентальную зону, подвергаемую чистке, и, следовательно, соответствующий диапазон ориентаций в привязанной к голове системе координат, вместо точной ориентации головы в привязанной к голове системе координат. Поэтому пользователь может начинать чистку щеткой в предварительно выбранной дентальной зоне, и система обработки должна знать данное начальное местоположение. В результате, вычисляется корреляция между измеренными ориентациями зубной щетки и целевым диапазоном ориентаций для предварительно выбранной дентальной зоны в начале события чистки щеткой. Любые ошибки, обусловленные исходной ориентацией головы, можно исключить (постепенно скорректировать) на втором этапе в процессе отслеживания головы.
На втором этапе, эффективно отслеживается ориентация головы, так как пользователь может изменять (или не изменять) ее в течение сеанса чистки щеткой. Измеренные ориентации зубной щетки служат для отслеживания изменений ориентации головы. Если ориентация головы изменяется, то измеренные ориентации зубной щетки будут отклоняться от целевого диапазона ориентаций (который не изменяется непосредственно из-за изменения ориентации головы), который соответствует дентальной зоне, подвергаемой чистке, так как измеренные ориентации зубной щетки будут изменяться следом за фактическим положением зубов, когда изменяется ориентация головы. Если положение головы не изменяется, то измеренные ориентации будут находиться в пределах сохраненного целевого диапазона ориентаций для дентальной зоны, подвергаемой чистке. Отклонение от целевого диапазона ориентаций, но в пределах пороговой величины относительно диапазона, указывает, что оценку ориентации головы следует исправить (что имеет следствием изменение целевого диапазона ориентаций), чтобы целевой диапазон ориентаций, выраженный в привязанной к земле системе координат, стал ближе к измеренным ориентациям зубной щетки. Изменение ориентации головы создает разность между целевым диапазоном ориентаций и измеренной ориентацией, при этом, фактически отслеживается (т.е. приводится в соответствие) упомянутая разность для ориентации головы. Поправка, которую следует внести в целевой диапазон ориентаций, может быть такой же, которая потребуется для поворота (согласования) диапазона целевых ориентаций в зависимости от измеренной ориентации зубной щетки. Однако, полностью корректирующая поправка обычно не выполняется из-за присутствия шумов в измеренных ориентациях; т.е. один интервал выборки нельзя использовать для выполнения полной коррекции. Следовательно, коррекция оказывается несколько меньше, чем полная коррекция и может изменяться от 0 (отсутствие коррекции) до 1 (полная коррекция).
При обработке, если какие-нибудь измеренные ориентации зубных щеток находятся за пределами диапазона (включая допуск/порог разности), который соответствует вероятной зоне дентальных положений, то информация об ориентации головы и целевой диапазон ориентаций не обновляется, так как информация об ориентации за порогом будет указывать, что зубная щетка перемещена пользователем из одной дентальной зоны в другую.
На фиг.1 показана система координат для зубной щетки, а на фиг.2 показана привязанная к голове система координат. На фиг.1, x-ось направлена вдоль щетинок, z-ось направлена вдоль стержня зубной щетки, и y-ось имеет боковое направление (поперечно) относительно зубной щетки. На фиг.2, z-ось является направлением снизу вверх от головы (перпендикулярно плоскости зубной дуги), x-ось является направлением вправо от головы, и y-ось является направлением вперед от головы. В настоящей системе, информация об ориентации зубной щетки относительно земли определяется из измеренной акселерометрической и магнитометрической информации. Это показано как этап 20 на фиг.4. Вычисление ориентационной информации по силе тяжести или магнитному полю земли кратко описано ниже. Вектора силы тяжести и магнитного поля земли имеют фиксированную и известную ориентацию в привязанной к земле опорной системе координат. Упомянутые вектора обозначены ниже как rg и rB, соответственно, и оба являются трехмерными векторами. При использовании зубной щетки, содержащей установленные на ней акселерометры и магнитометры, оба вектора можно измерить в системе координат, привязанной к зубной щетке, (фиг.1) что дает tg и tB. Ориентацию зубной щетки в привязанной к земле системе координат можно выразить в виде матрицы rT 3×3. Столбцы rT являются базисными векторами системы координат, привязанной к зубной щетке, выраженными в привязанной к земле системе координат. Зависимость между представлением вектора V в привязанной к земле системе координат, rV, и его представление в системе координат, привязанной к зубной щетке, tV, дается выражением:
 .
.
Следовательно, если составлен следующий ортогональный набор 3-мерных векторов:
 ,
,
то ориентацию rT зубной щетки можно получить следующим образом:

 ,
,
где вышеупомянутый набор векторов организован в виде матрицы. Надстрочный индексТ обозначает оператор транспонирования матрицы и применен для замены оператора обращения матрицы, что допускается, поскольку матрица-операнд является унитарной. Левостороннюю факторную матрицу (содержащую векторное представление в привязанной к земле системе координат) можно вычислить заранее. Если восточное, северное и верхнее направления принять как направления базисных векторов x, y, z привязанной к земле системы координат, то левосторонняя матрица становится единичной матрицей, так что
 .
.
Вышеприведенную формулу можно использовать для вычисления ориентации зубной щетки по измеренным векторам силы тяжести и магнитного поля, получаемым из акселерометрических и магнитометрических датчиков, смонтированных на зубной щетке. Однако, возможно применение других известных в технике методов, например, согласования векторов, для повышения точности определения ориентации.
В вышеописанных определениях, x-направление, приблизительно, параллельно щетинкам (когда щеткой не действуют), и поэтому в результате вышеприведенных вычислений получают информацию об ориентации зубной щетки в системе координат зубной щетки.
Каждую их зон дентальных положений наносят на соответствующий непрерывный диапазон целевых ориентаций зубной щетки, которые являются фиксированными (независимыми от) по времени, при представлении в привязанной к голове системе координат, показанной на фиг.2. Это представлено этапом 22 на фиг.4. Начало и конец каждого диапазона (для системы с двенадцатью зонами) соответствуют чистке резцов и моляров конкретной зоны, т.е. диапазону ориентаций зубной щетки от резцов до моляров. Поскольку головку щетки перемещают от моляров к резцам в одной дентальной зоне, то зубную щетку обычно поворачивают вокруг одной оси. Данная ось, как правило, расположена в z-направлении привязанной к голове системы координат (перпендикулярно плоскости зубной дуги на фиг.2). Полное определение зон (для двенадцати зон) в зависимости от начальной и конечной целевой ориентации зубной щетки приведено в таблице 1, где определены, например, для каждой зоны, выбранные поверхности зубов (внешняя, внутренняя, жевательная) верхней/нижней челюсти, либо с правой, либо с левой стороны.
|
Целевые ориентации даны в привязанной к голове системе координат и характеризуются углом поворота вокруг x-оси зубной щетки и направлением x-оси зубной щетки. Когда система координат, привязанная к зубной щетке, совмещена с привязанной к голове системе координат, угол поворота равен нулю, и направление x-оси зубной щетки задается как (1,0,0). Для чистки внешних поверхностей задних моляров на правой половине верхней челюсти, зубную щетку поворачивают, приблизительно, на +80° вокруг направления щетинок, и щетинки ориентируют в направлении  , где d=cos(80°).
, где d=cos(80°).
Каждый целевой диапазон ориентаций имеет начало и конец. Из начальной ориентации, конечную ориентацию достигают непрерывным поворотом зубной щетки вокруг одной оси поворота. В вышеприведенном конкретном примере, единственная ось поворота параллельна z-оси в привязанной к голове системе координат. В вышеприведенном примере, начальная и конечная ориентации каждой зоны разнесены между собой 80° поворотом зубной щетки.
Затем информация об измеренной ориентации зубной щетки сравнивается через равные промежутки времени (через каждое какое-то число миллисекунд) с целевыми диапазонами ориентаций в процессоре (этап 24) в зубной щетке или отдельном блоке. Определение дентальной зоны, которая подвергается чистке, щеткой включает в себя сравнение измеренных ориентаций зубной щетки (этап 20) с двенадцатью возможными целевыми диапазонами (этап 22). Наиболее вероятной дентальной зоной, подвергаемой чистке щеткой, является зона, в которой целевой диапазон ориентаций наиболее точно соответствует измеренной ориентации. Если наиболее точно соответствующий целевой диапазон слишком сильно отличается от измеренной ориентации, т.е. на более, чем пороговую разность относительно диапазона, то щетка, вероятно, не находится ни в одной из зон дентальных положений.
Разность между целевым диапазоном ориентаций и измеренной ориентацией измеряется по наименьшему углу поворота, который требуется для перехода от одной ориентации к другой. В этом отношении, вычисления проще, если ориентации выражены с использованием кватернионов. Вычисление угла поворота между измеренной ориентацией и целевым диапазоном ориентаций, представленными кватернионами, включает в себя получение точечного произведения двух кватернионов. Скалярное произведение пропорционально косинусу угла поворота. Взятие обратного косинуса скалярного произведения дает искомый угол поворота, которые является мерой разности ориентаций. Если величина угла поворота меньше, чем порог или значение допуска (в пределах порога) по отношению к целевому диапазону, то зубная щетка, вероятно, все еще находится внутри дентальной зоны, соответствующей данному целевому диапазону ориентаций. Обоснованные уровни порогов ориентаций находятся в диапазоне от 5° до 20°.
Как указано выше, целевые диапазоны ориентаций характеризуются начальными и конечными ориентациями зубной щетки. Кватернионы промежуточных целевых ориентаций получают интерполяцией между начальными и конечными ориентациями. Набор целевых кватернионов образуют дугу окружности в четырехмерном пространстве кватернионов. Для определения расстояния между кватернионом измеренной ориентации и диапазон кватернионов целевых ориентаций, первый этап состоит в нахождении одного интерполированного целевого кватерниона вдоль дуги, который наиболее точно соответствует измеренному кватерниону. Упомянутый кватернион называется оптимальным целевым кватернионом. После того, как упомянутый целевой кватернион идентифицирован, можно легко вычислить его расстояние до измеренного кватерниона. Упомянутое расстояние является расстоянием между кватернионом измеренной ориентации и диапазоном кватернионов целевых ориентаций.
Диапазоны целевых ориентаций преобразуют из привязанной к голове системы координат в привязанную к земле систему координат, чтобы их можно было сравнить с ориентациями зубной щетки, которые определяются в привязанной к земле системе координат. Данное преобразование выполняется умножением кватерниона, представляющего ориентацию головы, на кватернион, представляющий соответствующее(щий) начало или конец диапазона целевых ориентаций. Однако, как указано выше, в альтернативном варианте осуществления, измеренные ориентации зубной щетки преобразуются в привязанную к голове систему координат, и поэтому их можно сравнивать с диапазонами целевых ориентаций, уже назначенных в данной системе координат. Данное преобразование выполняется умножением кватерниона, сопряженного кватерниону, представляющему ориентацию головы, на кватернион, представляющий измеренную ориентацию зубной щетки.
Так как голова пользователя движется во время сеанса чистки щеткой, то кватернион ориентации головы обычно будет нуждаться в обновлении, что имеет следствием поправку целевого диапазона. Изменение ориентации головы оценивается в предположении, что, если найдено, что кватернионы измеренных ориентаций систематически отклоняются от целевого диапазона, соответствующего идентифицированной зоне дентальных положений, то это должно быть обусловлено изменением положения головы. Затем, вышеупомянутую ориентацию головы медленно доводят последовательными поправками к целевым ориентациям таким образом, чтобы отклонение (разность) в пределах порога между измеренной ориентацией зубной щетки и целевыми ориентациями стремилась, в конечном счете, к нулю. Данные поправки представлены линией 27 обратной связи между этапом 24 в процессоре и этапом 22 для целевых диапазонов.
В общем, найденный кватернион ошибки (разности) дает изменение целевого кватерниона для согласования с кватернионом измеренной ориентации зубной щетки. Если кватернион ошибки применяется для изменения кватерниона ориентации головы, то оптимальный кватернион целевой ориентации, по-видимому, будет совпадать с измеренным кватернионом ориентации. Однако, в общем, чтобы исключить неверные оценки ориентации головы и соответствующие неверные кватернионы целевой ориентации, обусловленные шумом в измеренном кватернионе, которые будут приводить к неточной идентификации дентальной зоны, оценку ориентации головы обновляют на основе ожидаемого изменения положения головы во время чистки щеткой, которое, обычно, является относительно небольшим. Применяется не кватернион полной ошибки, а его сокращенный вариант. Пример последовательности этапов системы обработки, использующей кватернионы, которые содержат обновление информации о положении головы, представлен ниже.
Применение ниже надстрочного индекса r указывает, что соответствующий количественный параметр (вектор, матрица или кватернион) выражен в привязанной к земле (опорной) системе координат. Аналогично, надстрочный индекс t свидетельствует о представлении в системе координат, привязанной к зубной щетке, и надстрочный индекс h свидетельствует о представлении в привязанной к голове системе координат.
(1) Определить матрицу tT ориентации зубной щетки текущего временного шага (интервала) по измерениям векторов силы тяжести (tg) и магнитного поля земли (B) датчиками, смонтированными на зубной щетке (акселерометром и магнитометром).
.
(2) Преобразовать матрицу rT ориентации в кватернион rt текущего временного шага посредством стандартного процесса преобразования матрица-кватернион.
(3) Применить кватернион rh(pre) головы предыдущего временного шага для получения ориентации зубной щетки в привязанной к голове системе координат (т.е. ht)

где * обозначает оператор сопряжения кватерниона, и ⊗ обозначает оператор умножения кватернионов.
(4) Вычислить целевой кватернион, оптимальный для зоны, hzoi, для каждого из диапазонов [hZBi, hZEi] (i=0…11) целевых ориентаций, принадлежащих к зоне дентальных положений. Кватернион hZBi является началом диапазона, а hZEi является концом диапазона. Для каждой зоны и соответствующего ей диапазона целевых ориентаций, целевой кватернион, оптимальный для зоны, является кватернионом в пределах целевого диапазона, который находится на минимальном расстоянии от tt.
(5) Вычислить расстояние между ht и каждым из целевых кватернионов hzoi, (i=0…11), оптимальных для зоны. Кроме того, вычислить соответствующий кватернион разности  .
.
(6) Использовать расстояние, вычисленное на предыдущем этапе, для идентификации зоны дентальных положений текущего временного шага в качестве зоны j, для которой соответствующий целевой кватернион hZOj, оптимальный для зоны, точнее всего соответствует ht. Соответствующий кватернион hdfj разности является кватернионом hhe=hdfj ошибки мгновенной ориентации головы. Если минимальное расстояние больше, чем предварительно заданный порог относительно диапазона, то не идентифицируется ни одно дентальное положение (щетка находятся между зонами), и кватернион ошибки мгновенной ориентации головы принимается (1,0,0,0).
(7) Преобразовать кватернион ошибки мгновенной ориентации головы в привязанную к земле систему координат,  .
.
(8) Вычислить кватернион обновления для головы как сокращенный вариант кватерниона ошибки мгновенной ориентации головы. Сокращенный вариант в данном случае означает, что величина поворота (т.е. угол поворота) уменьшен. Это можно выполнить умножением компонента 3-мерного вектора (т.е. трех последних скалярных компонентов) кватерниона на коэффициент k (0<k≤1) и затем перенормировкой кватерниона до единичного. Как в уравнении:
 .
.
Коэффициент k определяет время срабатывания алгоритма отслеживания алгоритма; где k=1 указывает на мгновенное срабатывание, а k=0 указывает на бесконечно долгое срабатывание. Оптимальное значение k является компромиссным между быстрым срабатывание (высокое k) и слабыми шумами (низкое k) оценки ориентации.
(9) Вычислить кватернион головы текущего временного шага rh(cur) посредством предварительного умножения кватерниона головы предыдущего временного шага rh(pre) на кватернион обновления для головы,  .
.
(10) Вернуться к этапу (1) для следующего временного шага.
По отношению к дополнительной информации о применении кватернионов, в общем, в настоящей системе, диапазон целевых ориентаций задается начальным кватернионом hZB и конечным кватернионом hZE. Весь диапазон является дугой (кольцевым сегментом) на единичной гиперсфере, которая соединяет два упомянутые кватерниона. Поворот, необходимый для перехода из ориентации hZB к ориентации hZE дается кватернионом интервала (Span):
 .
.
Данный кватетрнион интервала можно представить в стандартной форме:
где ϕspan означает угол поворота (для поворота из начальной (исходной) ориентации к конечной ориентации), и hn означает соответствующую ось поворота (3-мерный вектор единичной длины). Кватернион hzo, оптимальный для зоны, находится где-то на дуге, стягивающей hZB и hZE. Следовательно, данный кватернион можно выразить в виде:
 ,
,
где 0≤ϕopt≤ϕspan. Угол ϕopt определяет, где на дуге находится кватернион, оптимальный для зоны. Если ϕopt=0, то кватернион, оптимальный для зоны, совпадает с исходной ориентацией hZB, а, если ϕopt=ϕspan, данный кватернион совпадает с конечной ориентацией hZE.
Чтобы найти точный ϕopt, дугу временно продолжают до полной окружности, и вычисляют, где на окружности будет находиться ϕopt. Затем, ϕopt укорачивают на интервале 0≤ϕopt≤ϕspan. Положение на окружности можно вычислить из уравнения:
 ,
,
где hZB0 означает скалярный (первый) компонент кватерниона hZB, и hZB означает 3-мерную векторную часть (последние три компонента) кватерниона hZB. Аналогичным образом, ht0 означает скалярный компонент кватерниона ht (зубной щетки), и ht означает 3-мерную векторную часть кватерниона ht. Данное положение на окружности, обозначенное ϕopt, находится на экстремальном расстоянии (либо минимальном, либо максимальном) от кватерниона ht зубной щетки. В принципе, всегда существует одно положение на минимальном расстоянии и одно положение на максимальном расстоянии. Данные положения находятся диаметрально противоположно как на окружности, так и на единичной гиперсфере (поскольку центра окружности и гиперсферы совпадают). Иначе говоря, оба внешних положения разнесены на 2π в пересчете на ϕopt. Следовательно, упомянутые положения (с минимальным и максимальным расстоянием) соответствуют одной и той ориентации, и потребность в определении характера экстремума, обозначенного вычисленным ϕopt, отсутствует.
Кватернион hzo, оптимальный для зоны окончательно принимает вид:

Данное выражение содержит усечение до hZB и hZE. Оператор mod (по модулю) включен для интерпретации обоих экстремумов одинаковым способом. Нормировка необходима, чтобы обеспечивать единичную длину кватерниона hzo.
Определение через равные промежутки времени дентальной зоны, где чистит зубная щетка, в соответствии с вышеизложенным, учитывает возможные изменения ориентации головы пользователя во время чистки щеткой. Данное определение выполняется процессором 24 так, как подробно описано выше с использованием кватернионов. Затем, для пользователя формируется информация, касающаяся значения времени чистки, уделенного каждой дентальной зоне, на основании ориентации зубной щетки, как указано на этапе 28. Упомянутая информация обратной связи может формироваться внутри самой зубной щетки, которая обозначена пунктирными линиями 30 на фигуре 4, например, в речевой форме, или отдельным устройством, которое может содержать речевой вывод и дисплей. Связь между зубной щеткой и отдельным устройством может быть беспроводной или по проводному соединению. Отдельное устройство может быть устройством, специально предназначенным для зубной щетки, или данное устройство может быть PDA (персональным электронным секретарем) или мобильным телефоном пользователя, оборудованным подходящим беспроводным интерфейсом.
Таким образом, обратная связь в реальном времени обеспечивается по времени, уделяемому каждой зоне дентальных положений. Кроме того, можно определить недостаточно почищенные зоны, а также эффективность чистки, например, долю от общего времени чистки, уделяемому каждой зоне. Пользователю могут предоставляться в реальном времени разнообразные сообщения и информация. Обратная связь с пользователем может также предоставляться в форме сообщений о чистке и тенденций изменения чистки щеткой. Тенденции изменения нуждаются в памяти и подходящем пользовательском интерфейсе. Память может быть в форме запоминающего элемента, который можно подключать в отдельное устройство, или памяти внутри PDA или мобильного телефона пользователя. Информация также может храниться в персональном компьютере пользователя.
Итак, выше описана система для точного отслеживания дентальных зон во время чистки щеткой посредством определения ориентации зубной щетки с использованием акселерометров и магнитометров, при одновременно учете также изменений положения головы пользователя, посредством выбранной обработки ориентационной информации. Точную информацию о дентальных зонах, подвергаемых чистке, можно получать даже в случае, если пользователь двигает своей головой во время чистки щеткой, без потребности в отдельном датчике на голове пользователя. Упомянутую информацию можно обрабатывать для формирования важной обратной связи для пользователя по времени, уделяемому различным дентальным зонам, и другой связанной информации.
Хотя, для пояснения выше описан предпочтительный вариант осуществления настоящего изобретения, следует понимать, что в вариант осуществления можно вносить различные изменения, модификации и подстановки, без отклонения от сущности изобретения, которое определяется нижеследующей формулой изобретения.
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Электронный планировщик с функцией управления весом
Режущий элемент, электрическая бритва, оснащенная режущим элементом, и способ получения такого элемента
Компактная оптическая система и линзы для формирования равномерного коллимированного света
Одночастотная сеть
Система и способ для управления освещением
Способ, система и пользовательский интерфейс для автоматического создания атмосферы, в частности освещенной атмосферы, на основании ввода ключевого слова
Определение пространственного распределения отдачи сцинтиллятора
Способ и устройство для регистрирования сосудистой структуры во время медицинского воздействия
Устройство и способ для получения напитка
Подставка для поддержания чашки и кофе-машина или подобное ей устройство, содержащее упомянутую подставку
Освещающее устройство
Цифровая обработка импульсов в схемах счета мультиспектральных фотонов
Уменьшение эффектов захвата в сцинтилляторе за счет применения вторичного излучения
Пространственная мышь - устройство связи
Органическое светоизлучающее устройство с регулируемой инжекцией носителей заряда
Способ определения, по меньшей мере, одного приемлемого параметра для процесса приготовления напитка
Устройство для перфорирования порционных капсул
Светоизлучающий ворсовый ковер

