Результат интеллектуальной деятельности: СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля для идентификации и определения местоположения источников несанкционированных радиоизлучений в пределах контролируемого объекта (зоны пространства).
Известен способ обнаружения источников электромагнитных излучений в пределах контролируемой зоны, включающий прием радиосигналов за пределами контролируемой зоны и в пределах или непосредственной близости от нее, измерение и сравнение уровней принятых сигналов, выделение излучений, уровни которых в пределах или в непосредственной близости от контролируемой зоны равны или превышают измеренные уровни за пределами этой зоны. [1. Патент РФ №2099870, кл. Н04В 1/46, G01S 11/00, опубл. 1997 г.].
Недостатком данного способа является отсутствие возможности определения местоположения излучателя в контролируемой зоне.
Из известных наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является (прототип) способ выявления источников электромагнитных излучений объекта мобильным пеленгатором, включающий предварительное определение, путем равномерного квантования в декартовой системе координат, рабочей зоны, как области энергетической доступности радиоизлучений, в ней области объекта, прием радиосигналов и пеленгование с помощью пеленгаторных антенн, образующих антенную решетку, и многоканального приемного устройства мобильного пеленгатора в пунктах приема, расположенных с разных сторон объекта, определение для каждого пункта приема угловых границ области объекта, сравнение результатов пеленгования с этими границами, при попадании в которые идентифицируют излучение, как принадлежащее объекту, в этом случае, в рабочей зоне прокладывают линии пеленгов, а местонахождение источника излучения оценивают по пересечениям линий пеленгов. [2. Ашихмин А.В, Жуков А.А., Козьмин В.А. и др. Выявление источников электромагнитных волн в объектах с помощью мобильного комплекса радиопеленгования и контроля. «Специальная техника», спец. выпуск, январь 2003, с.61-73].
Недостатки данного способа состоят в следующем. При больших погрешностях пеленгования способ обеспечивает низкую достоверность идентификации и точность определения местоположения. В этом случае линии пеленгов выходят за область объекта, что сопровождается пропуском излучения. Инструментальная точность снижается и вследствие равномерного квантование рабочей зоны. При высоких и неизвестных в различных пунктах приема уровнях помех и погрешностях пеленгования, характерных для условий индустриального города, операция установки идентификационных границ объекта вовсе становится неопределенной. Искусственное увеличение области объекта сверх его истинных размеров приводит к возрастанию уровня ложных тревог, возникает неопределенность оценки местоположения излучателя.
Технической задачей изобретения является повышение достоверности идентификации, увеличение точности определения местоположения излучателя, обеспечение идентификации при высоких и неизвестных уровнях помех.
Поставленная техническая задача решается за счет того, что в известном способе идентификации радиосигналов контролируемого объекта и определения местоположения источника, включающем, предварительное определение рабочей зоны, в ней области объекта, прием радиосигналов в пунктах приема с помощью пеленгаторных антенн и многоканального приемного устройства, согласно изобретению, для каждого пункта приема оценивают распределение уровня помех в рабочей зоне, для чего измеряют энергию принятых радиосигналов, преобразуют их в пространственный спектр, который вычитают из измеренной энергии, затем определяют среднее геометрическое распределений уровня помех, его минимумы в области объекта и вне объекта, значения минимумов сравнивают, по результатам чего идентифицируют радиосигналы и определяют местоположение источника, как положение минимума в области объекта, при этом преобразование в пространственный спектр выполняют путем компенсации расчетных, с учетом расстояний от пеленгаторных антенн до источников, набегов фаз принятых радиосигналов, последующего суммирования преобразованных радиосигналов, квадратичного детектирования суммарного радиосигнала и деления на число пеленгаторных антенн, причем рабочую зону определяют в виде круга с центром в геометрическом центре объекта и квантуют, исходя из заданной точности определения местоположения источника контролируемого объекта, по закону спирали Архимеда, при этом комплексные координаты квантов, как мест возможного излучения, определяют по формуле  , где xν, yν - абсцисса и ордината ν-го кванта в декартовой системе координат, ν=0,1,…,V-1 - номер кванта, i - мнимая единица, Δ - заданная точность определения местоположения, V=Rs/Δ - число квантов, Rs - радиус рабочей зоны.
, где xν, yν - абсцисса и ордината ν-го кванта в декартовой системе координат, ν=0,1,…,V-1 - номер кванта, i - мнимая единица, Δ - заданная точность определения местоположения, V=Rs/Δ - число квантов, Rs - радиус рабочей зоны.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые фигуры.
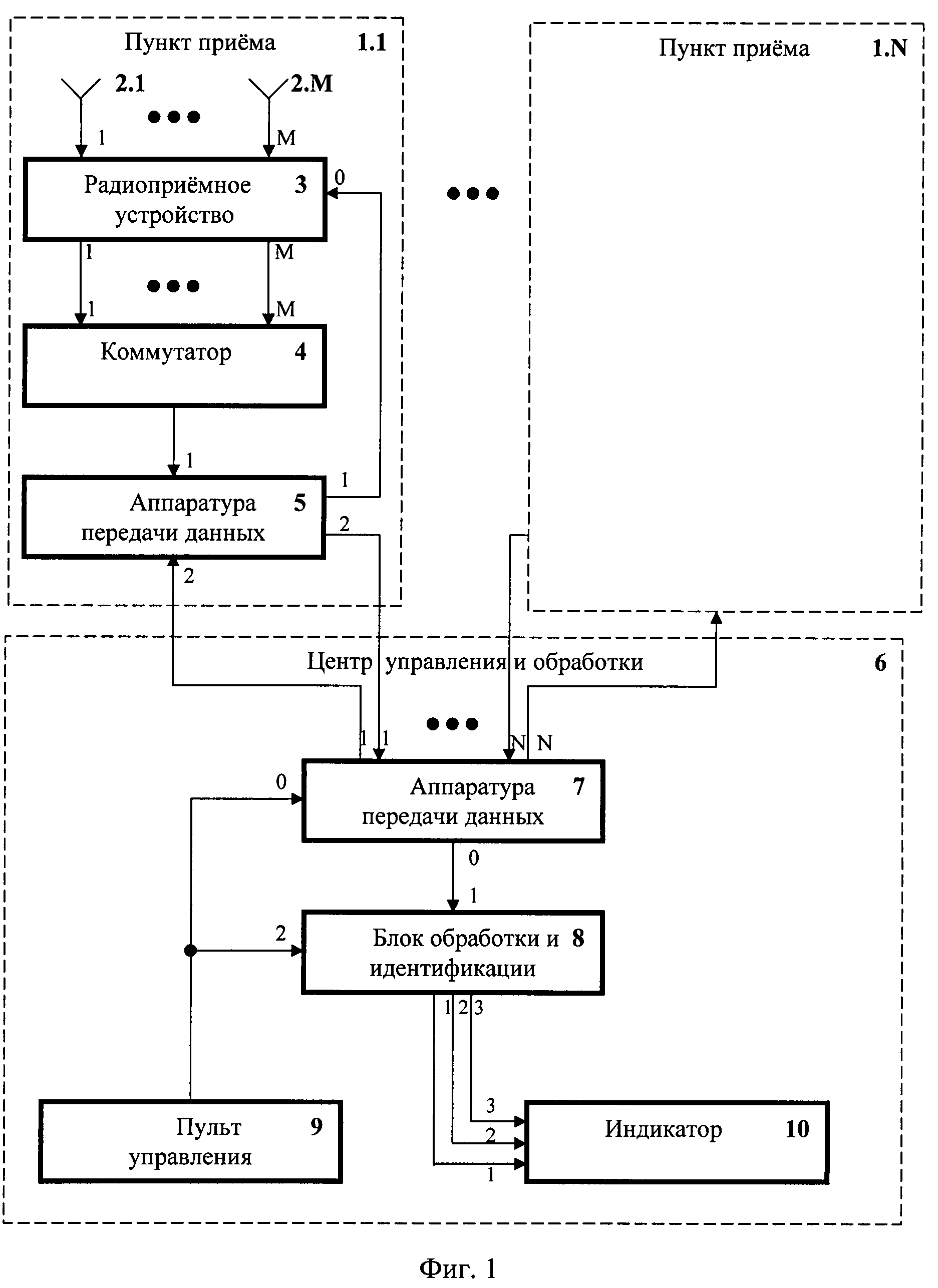
Фиг.1 - структурная схема системы радиоконтроля для реализации заявленного способа;
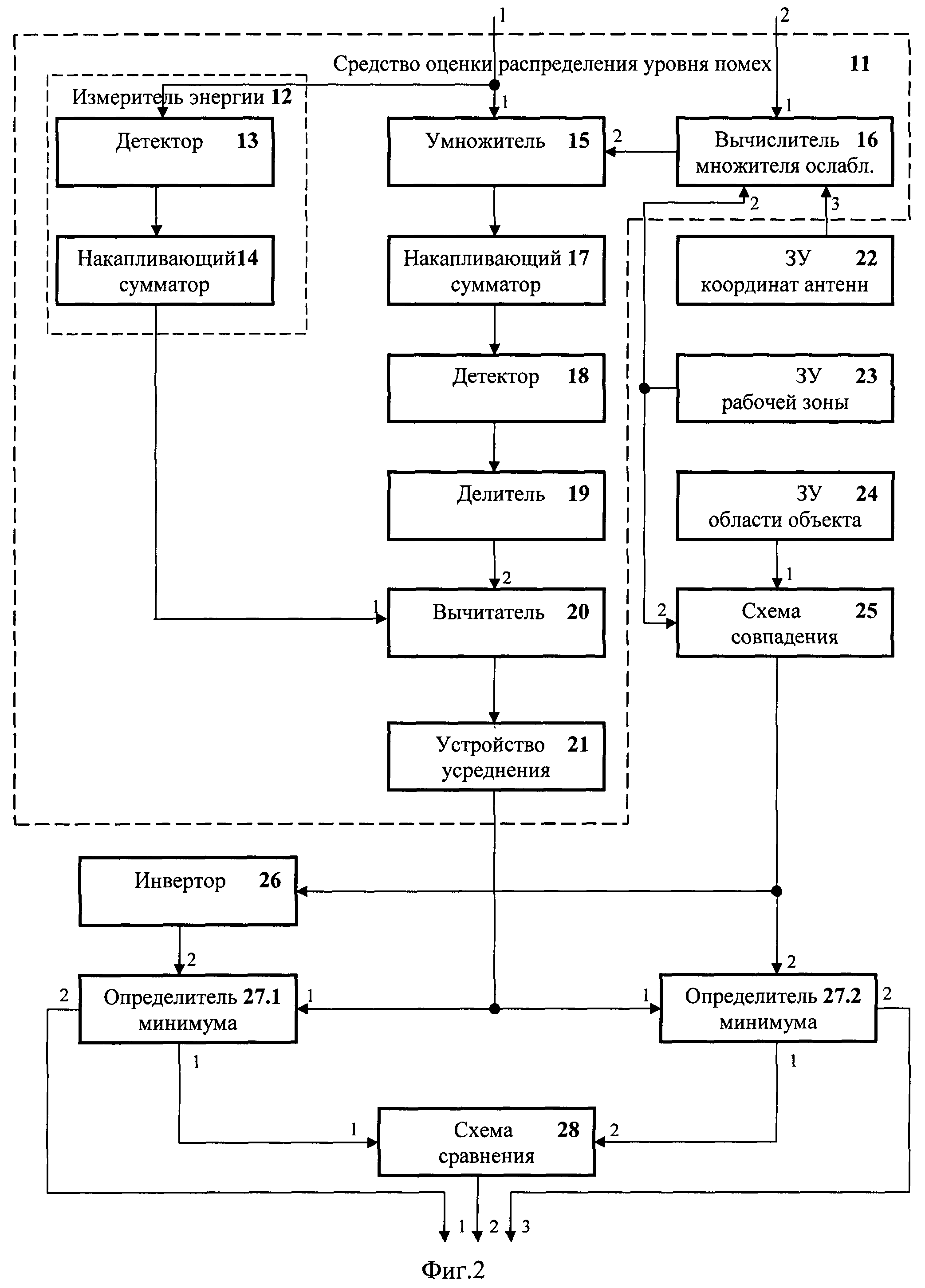
Фиг.2 - структурная схема блока обработки и идентификации;
Фиг.3 - квантованная рабочая зона (мелкими точками) с местами расположения пунктов приема (жирными точками) и областью объекта (ограниченна окружностью);
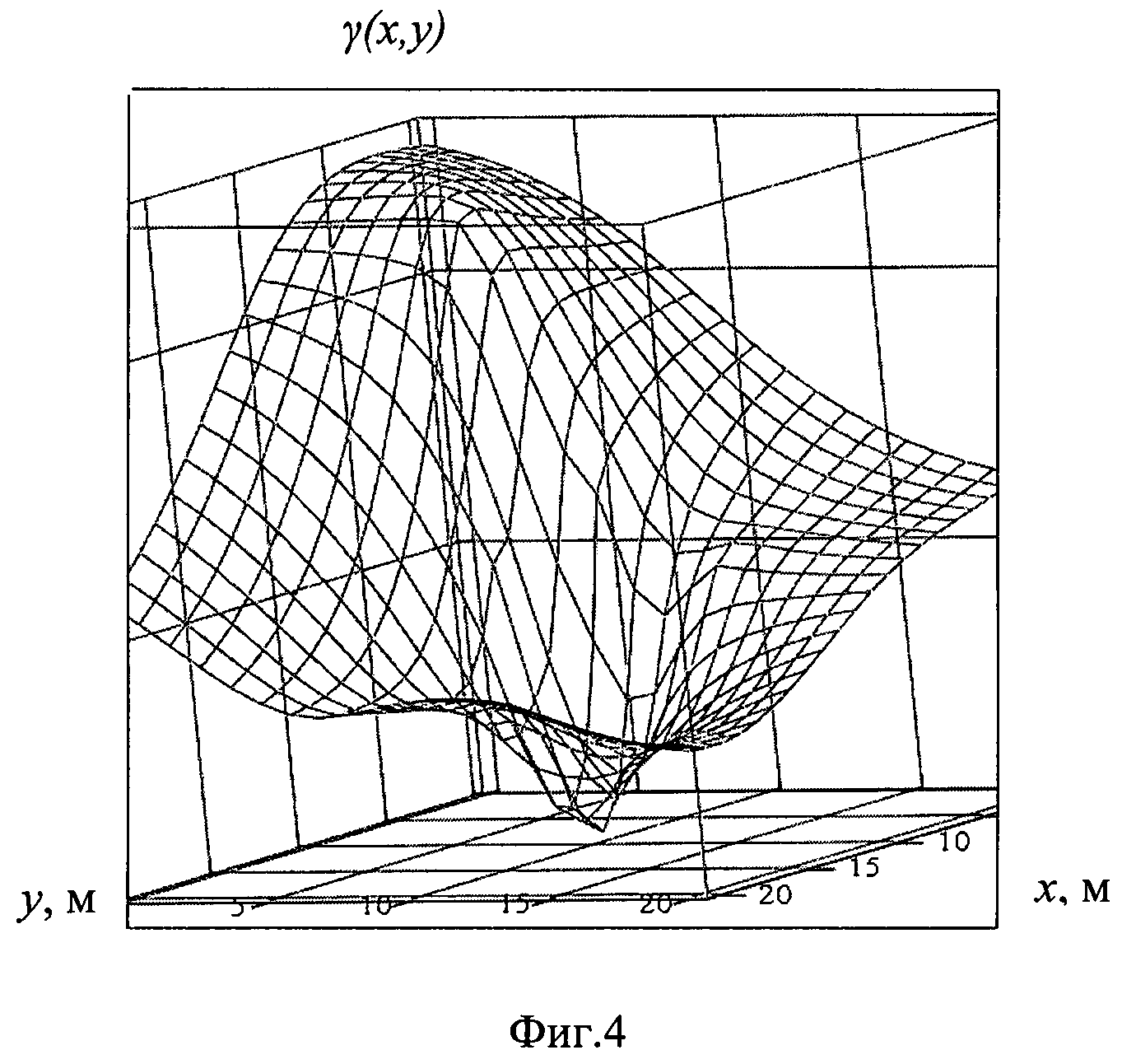
Фиг.4 - график поверхности распределения среднего уровня помех;
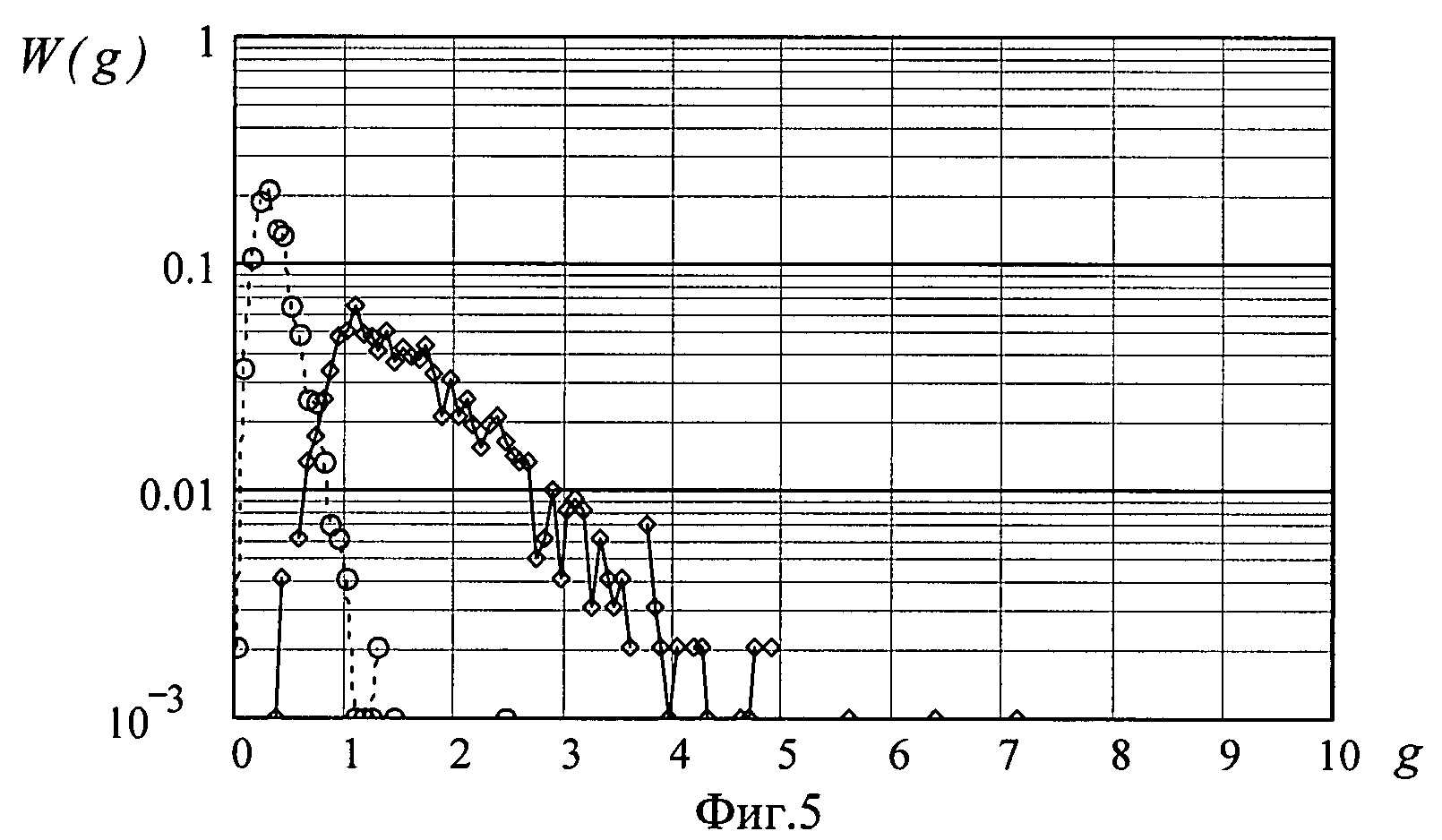
Фиг.5 - гистограммы решающих статистик;
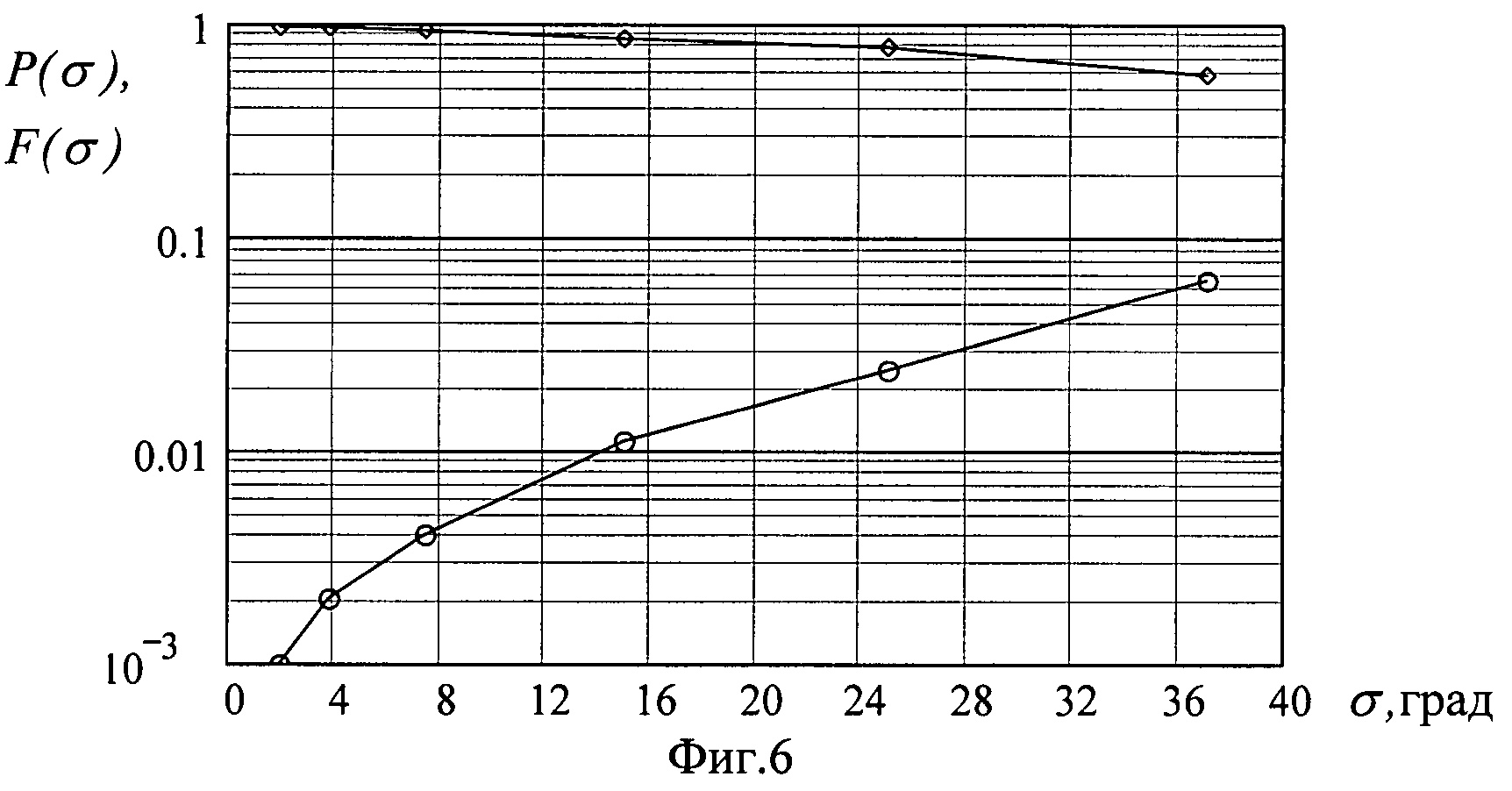
Фиг.6 - зависимости вероятностей правильной идентификации и ложной тревоги от погрешности пеленгования;
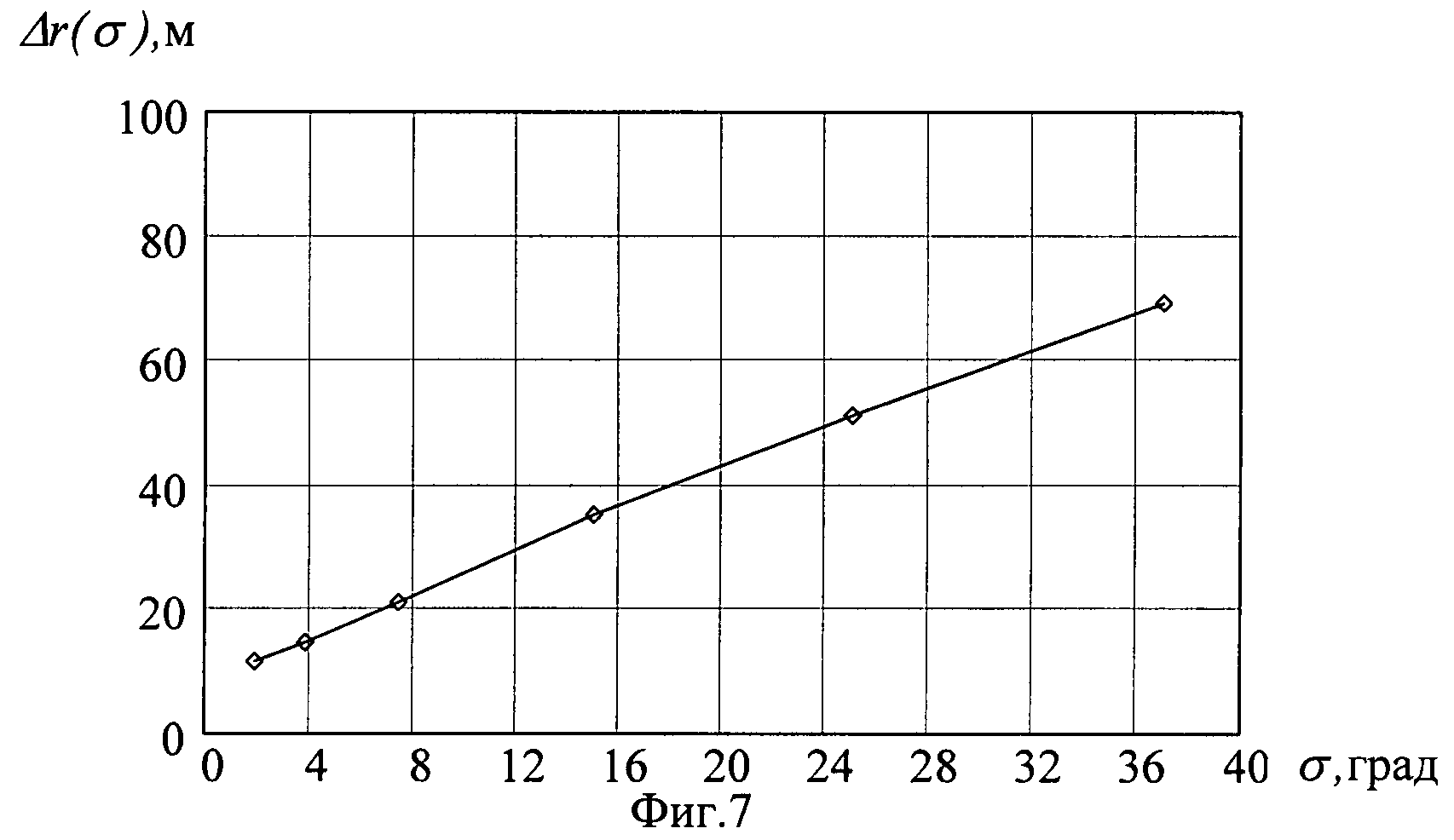
Фиг.7 - зависимость линейной ошибки определения местоположения излучателя объекта от погрешности пеленгования.
Решение поставленной технической задачи базируется на результатах статистического синтеза в условиях неопределенности уровней помех и состоит в переходе от признакового пространства пеленгов, принятого в ближайшем аналоге [2], к признаковому пространству в виде распределения среднего уровня помех в рабочей зоне. Для этого распределение уровня помех оценивают в каждом пункте приема, затем усредняют по совокупности пунктов приема, определяя среднее геометрическое.
При оценивании распределения уровня помех измеряют энергию принятых радиосигналов, преобразуют их в пространственный спектр, который вычитают из измеренной энергии. Пространственный спектр характеризует распределение в рабочей зоне энергии излучений, образуется путем компенсации расчетных набегов фаз принятых радиосигналов, последующего суммирования преобразованных радиосигналов по совокупности пеленгаторных антенн пункта приема, квадратичного детектирования суммарного радиосигнала и деления на число пеленгаторных антенн. Расчетные набеги фаз определяют исходя из расстояний от пеленгаторных антенн до возможных мест излучения.
Предлагаемый порядок определения пространственного спектра основан на учете зависимости напряженности поля источника от расстояния до него. В частности, набег фаз пропорционален расстоянию. В ближайшем аналоге [2] эту информацию учитывают опосредованно, при пеленговании. Более полный учет данного фактора обеспечивает повышение эффективности решения задачи идентификации и определения местоположения.
После вычитания из энергии пространственного спектра в точке истинных координат источника в образующейся разности остается составляющая шума. Для других точек пространства будет композиция шума и не скомпенсированный остаток излучения, то есть с уровнем выше, чем в точке истинных координат. Вне зависимости от интенсивности шумов (помех) глобальный минимум распределения располагается в окрестности истинных координат источника. Когда излучение происходит из объекта, минимум распределения в области объекта преимущественно меньше минимума, определяемого в области пространства вне объекта. Обратная ситуация, когда излучает сторонний источник.
Это позволяет, определяя и сравнивая минимумы среднего уровня помех в области и вне объекта принимать максимально правдоподобные решения, достигается статистическая устойчивость идентификации при неизвестном уровне шума в широком диапазоне его изменения.
Определением среднего уровня помех в виде среднего геометрического, как корня степени N из произведения по n [3. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М., Наука, 1986, с.139], распределений всех пунктов приема достигается учет неравноточности измерений, обратно пропорционально оценочному уровню помех, в конечном счете, повышается точность определения местоположения.
Дополнительное увеличение точности обусловлено переходом от принятого в прототипе [2] равномерного квантования к неравномерному квантованию рабочей зоны. Погрешность определения координат увеличивается по мере удаления от центра рабочей зоны. Квантованием по закону спирали Архимеда достигается увеличение плотности точек квантования в области объекта, обратно пропорционально удалению источника от центра рабочей зоны.
Таким образом, учет зависимости напряженности поля источника от расстояния до него, переход к признаковому пространству в виде распределения среднего уровня помех в рабочей зоне и его неравномерному квантованию, в соответствии с предложенными новыми действиями над сигналами, условиями и порядком их выполнения, позволяет решить поставленную задачу: повысить достоверность идентификации, увеличить точность определения местоположения излучателя, обеспечить выполнение идентификации при неизвестных уровнях помех.
Заявленный способ может быть реализован при использовании соответствующей системы радиоконтроля.
Система радиоконтроля (фиг.1), реализующая предложенный способ, содержит N≥1 пунктов приема 1.1-1.N, каждый из которых включает М≥3 пеленгаторных антенн 2.1-2.М, радиоприемное устройство 3, коммутатор 4 и аппаратуру передачи данных 5, центр управления и обработки 6, содержащий аппаратуру передачи данных 7, блок обработки и идентификации 8, пульт управления 9, индикатор 10. Антенны 2.1-2.М через входы 1-М радиоприемного устройства его 1-М выходы подключены к входам 1-М коммутатора 4, выход которого подключен к первому входу аппаратуры передачи данных 5 пункта приема 1.1, первый выход которой подключен к входу 0 радиоприемного устройства 3. Второй вход аппаратуры передачи данных 5 является входом пункта приема 1.1, выходом которого является второй выход этой аппаратуры. Входы 1-N аппаратуры передачи данных 7 центра управления и обработки 6 подключены к выходам соответственно пунктов приема 1.1-1.N, а ее одноименные выходы к их входам. Аппаратура передачи данных 7 центра управления и обработки 6 подключена через 0 выход, 1 вход блока обработки и идентификации 8 его 1-3 выходы к индикатору 10 через его 1-3 входы. Выход пульт управления 9 подключен к 0 входу аппаратуры передачи данных 7 и 2 входу блока обработки и идентификации 8.
Блок обработки и идентификации 8 содержит (фиг.2) средство оценки распределения уровня помех 11, содержащее измеритель энергии 12, включающий соединенные последовательно детектор 13 и накапливающий сумматор 14, умножитель 15, вычислитель набега фаз 16, соединенные последовательно подключенный входом к выходу умножителя 15 накапливающий сумматор 17, детектор 18, делитель 19, через второй вход вычитатель 20 и устройство усреднения 21, запоминающее устройство (ЗУ) 22 координат антенн, подключенное выходом к 3 входу вычислителя набега фаз 16, второй вход которого соединен с выходом ЗУ 23 рабочей зоны, ЗУ 24 области объекта подключенное через 1 вход схемы совпадения 25, инвертор 26 к входу 2 первого определителя минимума 27.1, второй 27.2 определитель минимума, первый выход которого соединен с 2 входом схемы сравнения 28, к 1 входу которой подключен 1 выход первого определителя минимума 27.1, первый вход которого и первый вход второго определителя минимума 27.2 подключены к выходу устройства усреднения 21. Выход накапливающего сумматора 14 измерителя энергии 12 соединен с 1 входом вычитателя 21. Выход ЗУ 23 рабочей зоны соединен с входом 2 схемы совпадения 25. Вход 1 средства оценки уровня помех 11 является первым входом блока обработки и идентификации 8, подключен к первому входу умножителя 15 и входу детектора 13 измерителя энергии 12, вход 2 этого средства является вторым входом блока обработки и идентификации 8, подключен к 1 входу вычислителя набегов фаз 16. Выходами 1-3 блока обработки и идентификации 8 являются соответственно 2 выход первого определителя минимума 27.1, выход схемы сравнения 28 и выход 2 второго определителя минимума 27.2.
При наличии возможности пункты приема 1.1-1.N целесообразно размещать с внешней стороны объекта вблизи его контура, как это показано на фиг.3, их количество не менее одного, N≥1, но с увеличением N возрастает эффективность идентификации.
Пеленгаторные антенны 2.1-2.М идентичные, всенаправленные в горизонтальной плоскости, размещают равноудалено на окружности заданного, из условия обеспечения однозначности пеленгования, радиуса. Таким образом, образуется пеленгаторная антенная система (эквидистантная решетка). Число антенн М≥3. Нумерацию антенн m=1,2,…,М выполняют от опорного направления, например, направления на Север, по часовой стрелке. Антенна с номером m=1 ориентирована относительно центра в опорном направлении.
Радиоприемное устройство 3 имеет число каналов равное числу антенн, выполняет фильтрацию и синхронное преобразование сигналов пеленгаторных антенн с цифровым представлением в виде квадратурных составляющих (комплексных амплитуд), например, по варианту, приведенному в [4. Побережский К. С.Цифровые радиоприемные устройства. М., Радио и связь, 1987, с.67-68, рис.3.14].
Коммутатор 4 обеспечивает поочередный съем информации с выходов 1-М радиоприемного устройства 3, поступающей на его одноименные входы, с последующей передачей с помощью аппаратуры передачи данных 5 через ее вход 1 и выход 2 в центр управления и обработки 6 на вход 1 многоканальной, по числу пунктов приема, аппаратуры передачи данных 7. Далее информация, принятая аппаратурой передачи данных 7, передается через выход 0 в блок обработки и идентификации 8 на его первый вход. Аналогично и поочередно для других пунктов приема.
Управление частотой настройки радиоприемного устройства 3 пункта приема 1.1 (аналогично для других пунктов приема) осуществляют по входу и радиоприемного устройства 3 с пульта управления 9 через 0 вход и 1 выход аппаратуры передачи данных 7 центра управления и обработки 6, вход 2 и выход 1 аппаратуры передачи данных 5 пункта приема 1.1. Одновременно значение частоты с пульта управления подают на вход 2 блока обработки и идентификации 8, где используют для расчета набегов фаз.
На индикаторе 10 отображают результаты идентификации, поступающие по входам 1-3 с одноименных выходов блока обработки и идентификации 8.
Блок обработки и идентификации 8 выполнен фиг.2 на основе цифровой элементной базы. Умножитель 15 этого блока обеспечивает перемножение комплексной величины (по первому входу) на комплексно сопряженную (по второму входу). Перед началом непосредственного функционирования системы радиоконтроля в запоминающие устройства (ЗУ) записывают координаты: антенн пунктов приема - в ЗУ 22, квантов рабочей зоны - в ЗУ 23, квантов области объекта - в ЗУ 24.
Рабочую зону определяют, как область энергетической доступности радиоизлучений, в виде круга с центром в геометрическом центре объекта. В условиях индустриального города радиус рабочей зоны составляет 0,5-3,0 км. Пример такой рабочей зоны радиусом Rs=500 м показан мелкими точками на фиг.3. Область пространства, занимаемого объектом, является внутренней подобластью рабочей зоны, ограничена окружностью радиусом 100 м.
Рабочую зону квантуют, исходя из заданной точности определения местоположения источника контролируемого объекта, по закону спирали Архимеда [3, с.128], при этом комплексные координаты квантов, как мест возможного излучения, определяют по формуле

где точка над величиной указывает ее комплексный характер, xν, yν - абсцисса и ордината v-го кванта в декартовой системе координат, ν=0,1,…,V-1 - номер кванта, i - мнимая единица, Δ - заданная точность определения местоположения, V=Rs/Δ - число квантов, Rs - радиус рабочей зоны.
Коэффициент 1.737 в показателе экспоненты, определяющий скорость углового вращения вектора спирали, выбран из условия обеспечения равно-удаленности ближайших квантов.
Пример квантованной по формуле (1) рабочей зоны показан на фиг.3 для параметров: Δ=1,134 м, Rs=500 м, V=441. На рисунке и далее по тексту указание номеров квантов для упрощения записи опущено.
В соотвествии с фиг.3 плотность квантования возрастает в центре рабочей зоны, то есть именно там, где расположен объект и достигается максимальная потенциальная точность определения местоположения излучателя.
Все квантованные по формуле (1) координаты заносят в ЗУ 23 квантов рабочей зоны, а в ЗУ 24 квантов области объекта записывают координаты квантов, попадающих в область объекта, то есть удаленных от центра, точки с координатами (0, 0), рабочей зоны не более чем на 100 м.
Координаты антенн пунктов приема  , где n=1,2,…,N - номер пункта приема, m=1,2,…,M - номер антенны этого пункта приема, Xn,m,Yn,m - абсцисса и ордината координат антенн в декартовой системе, удобно определить как сумму координат непосредственно пункта приема
, где n=1,2,…,N - номер пункта приема, m=1,2,…,M - номер антенны этого пункта приема, Xn,m,Yn,m - абсцисса и ордината координат антенн в декартовой системе, удобно определить как сумму координат непосредственно пункта приема  и относительных координат антенн
и относительных координат антенн  (относительно центра пункта приема):
(относительно центра пункта приема):

Координаты пунктов приема могут быть определены с помощью радионавигационных приборов, а относительные координаты антенн рассчитывают по формуле

где R - радиус пеленгаторной антенной системы (решетки).
Полученные указанным образом координаты антенн пунктов приема запоминают в ЗУ 22 координат антенн.
Принцип последующего функционирования системы радиоконтроля состоит в следующем.
Принятые антеннами 2.1-2.М пунктов приема 1.1-1.N радиосигналы в виде комплексных амплитуд  подвергают обработке в блоке обработки и идентификации 8. Истинные значения комплексных амплитуд зависят от расстояний антенн с координатами
подвергают обработке в блоке обработки и идентификации 8. Истинные значения комплексных амплитуд зависят от расстояний антенн с координатами  до источника излучения с координатами
до источника излучения с координатами  .
.

Эти комплексные амплитуды определяются по формуле

где un, ϕn - амплитуда и начальная фаза радиосигнала в центре пеленгаторной антенной системы, λ=с/f - длина волны излучения, с=3·108 м/с - скорость света, f - частота излучения, π=3,1428….
Величина в показателе экспоненты в (5) вида

есть набег фаз радиосигнала, обусловленный его задержкой при распространении.
Координаты излучателя  , начальные фазы ϕn, амплитуды un неизвестны.
, начальные фазы ϕn, амплитуды un неизвестны.
В процессе распространения радиоволн и приема радиосигналы искажаются шумами и помехами, так что комплексные амплитуды принятых радиосигналов представляют собой смесь

где  - шумы приема с неизвестным, в общем случае различным в точках приема уровнем.
- шумы приема с неизвестным, в общем случае различным в точках приема уровнем.
В блоке обработки и идентификации 8 выполняют следующие преобразования.
Для каждого пункта приема в средстве 11 (фиг.2) оценивают распределение уровня помех в рабочей зоне. Для этого с помощью измерителя 12 измеряют энергию принятых радиосигналов. Радиосигнал принятый каждой антенной пункта приема, поступающий на первый вход средства оценки распределения уровня помех, квадратично детектируют в детекторе 13 и суммируют по совокупности антенн в накапливающем сумматоре 14, по выходу которого получают измеренную энергию радиосигналов каждого пункта приема
Одновременно с измерением энергии принятые радиосигналы, преобразуют в пространственный спектр. При этом в вычислителе набегов фаз 16, с учетом расстояний (4) от пеленгаторных антенн до источников, рассчитывают набеги фаз (6), с представлением их в виде комплексного множителя  . Необходимые при этом координаты точек рабочей зоны
. Необходимые при этом координаты точек рабочей зоны  и антенн
и антенн  поступают из запоминающих устройств соответственно 23 и 22 по второму и третьему входу вычислителя 16, а значение частоты - по его первому входу (со второго входа средства оценки распределения уровня помех 11). Непосредственно преобразование в пространственный спектр выполняют путем умножения принятых радиосигналов, поступающих на первый вход умножителя 15, на комплексный фазовращающий множитель, поступающий на его второй вход с вычислителя 16. После чего, преобразованные радиосигналы суммируют по совокупности пеленгаторных антенн в накапливающем сумматоре 17, квадратично детектируют детектором 18 и делят в делителе 19 на число пеленгаторных антенн. В совокупности реализуется преобразование в пространственный спектр, описываемое следующим аналитическим соотношением:
поступают из запоминающих устройств соответственно 23 и 22 по второму и третьему входу вычислителя 16, а значение частоты - по его первому входу (со второго входа средства оценки распределения уровня помех 11). Непосредственно преобразование в пространственный спектр выполняют путем умножения принятых радиосигналов, поступающих на первый вход умножителя 15, на комплексный фазовращающий множитель, поступающий на его второй вход с вычислителя 16. После чего, преобразованные радиосигналы суммируют по совокупности пеленгаторных антенн в накапливающем сумматоре 17, квадратично детектируют детектором 18 и делят в делителе 19 на число пеленгаторных антенн. В совокупности реализуется преобразование в пространственный спектр, описываемое следующим аналитическим соотношением:
Поскольку при расчетном набеге фаз  в показателе экспоненты стоит знак минус (результат умножения на комплексно сопряженную величину в умножителе 15), то набеги фаз принятых радиосигналов
в показателе экспоненты стоит знак минус (результат умножения на комплексно сопряженную величину в умножителе 15), то набеги фаз принятых радиосигналов  в точке истинных координат действительно компенсируются, происходит когерентное сложение и образуется максимум пространственного спектра.
в точке истинных координат действительно компенсируются, происходит когерентное сложение и образуется максимум пространственного спектра.
На основе измеренной энергии (8) и пространственного спектра (9) вычитанием второго из первого в вычитателе 20 оценивают распределение уровня помех в каждой точке рабочей зоне

Полученное распределение усредняют по совокупности всех пунктов приема, для чего в устройстве усреднения 21 определяют среднее геометрическое
Типичный вид распределения среднего уровня помех (12) при излучении из центра объекта с размещением пунктов приема согласно фиг.3 показан на фиг.4. Это распределение имеет минимум в точке истинных координат источника. Для последующей идентификации определяют минимумы, среди всех квантов пространства соответствующей области минимизации, распределения в области вне объекта, определителем минимума 27.1, и в области объекта, определителем минимума 27.2. Указание принадлежности значений распределения среднего уровня помех, поступающих с устройства усреднения 21, области минимизации осуществляют сигналами по входам 2 управления определителей 27.1, 27.2. Эти сигналы вырабатываются схемой совпадения 25. Единичный уровень соответствует совпадению координат точки рабочей зоны ЗУ 23 с координатами точек области объекта ЗУ 24. В момент совпадения соответствующее значение среднего уровня помех учитывается при минимизации в определителе минимума 27.2. Логически противоположно функционирует определитель 27.1, сигналы управления на который изменяются инвертором 26.
С первых выходов определителей минимумов 27.1, 27.2 на первый и второй входы схемы сравнения 28 поступают минимальные значения распределения среднего уровня помех в области вне объекта и в области объекта. Эти значения сравнивают и если первое значение (вне объекта) превышает второе идентифицируют радиосигналы, принимают решение о принадлежности радиосигналов объекту, по второму выходу схемы сравнения 28 выдается логическая единица. Местоположение источника, определяют как положение минимума в области объекта и с выхода 2 определителя 27.2 соответствующие координаты поступают на выход 3 блока обработки и идентификации 8 и далее на одноименный вход индикатора 10 для отображения местоположения излучателя. При невыполнении условия сравнения в схеме 28 формируется логический ноль и отображается местоположение стороннего источника (при необходимости), координаты которого поступают со второго выхода определителя 27.1 на первый выход блока обработки и идентификации 8 и далее на первый вход индикатора 10.
На фиг.5 показаны гистограммы решающих статистик W(g), где g - отношение минимумов распределения среднего уровня помех в области вне объекта и в области объекта. Кружками отмечены данные при излучении сторонних источников, ромбиками при излучении объекта. Распределение источников равновероятное в соответствующей области. Результаты получены по 1000 статистическим экспериментам для параметров: N=3, М=3, R=0,1 м, λ=1 м, отношение сигнал/шум 5 (отношение амплитуды радиосигнала к среднему квадратическому значению гауссовского центрированного шума по выходу радиоприемного устройства). Указанные условия соответствуют достаточно высокой средней квадратической ошибке пеленгования 15 градусов. Видно, что при излучении объекта решающая статистика преимущественно превышает единицу, что и позволяет проводить идентификацию при неизвестных уровнях помех сравнением минимумов распределения среднего уровня помех в области объекта и в области вне объекта.
Заявленный способ может быть реализован и с применением мобильного пеленгатора [2]. В этом случае используют один комплект пункта приема и совмещенный с ним центр управления и обработки.
Эффективность идентификации характеризуется двумя показателями: вероятностью правильной идентификации (определения принадлежности излучения объекту, если оно действительно исходит из него) и ложной тревоги (определения принадлежности излучения объекту, если излучает сторонний источник). Зависимости этих показателей от потенциальной средней квадратической ошибки пеленгования σ приведены на фиг.6, кружком для ложной тревоги F(σ), ромбиком для правильной идентификации Р(σ).
Потенциальная точность (ошибка) пеленгования для означенной пеленгаторной системы определяется известным [5. Дзвонковская А.Л., Дмитриенко А.Н., Кузьмин А.В. Эффективность измерения углов прихода сигнала радиопеленгаторами на основе метода максимального правдоподобия. - Радиотехника и электроника, 2001, т.46, №10, с.1242-1247.] соотношением:

где ρ - отношение сигнал/шум.
Потенциальная точность (ошибка) (24) зависит не только от уровня шума (отношения сигнал/шум), но также от радиуса решетки и длины волны излучения. Поэтому, несмотря на то, что в предлагаемом решении непосредственно пеленгования не выполняют, в качестве параметра, определяющего эффективность идентификации, принята потенциальная средняя квадратическая ошибка пеленгования σ, обеспечиваемая используемой пеленгаторной антенной системой.
В соотвествии с фиг.6, в широком диапазоне изменения погрешности пеленгования (и уровня помех) вероятность правильной идентификации близка к единице. Вероятность ложной тревоги резко уменьшается, примерно на два порядка, по мере снижения погрешности пеленгования.
При изменении состава и параметров системы радиоконтроля, а также радиуса объекта R0 для стабилизации вероятности правильной идентификации уровень сравнения в схеме 28 целесообразно регулировать, изменяя его единичное значение на коэффициент  что эквивалентно ответствующему изменению значения минимума в области объекта.
что эквивалентно ответствующему изменению значения минимума в области объекта.
Линейная ошибка Δr(σ) определения местоположения излучателя объекта (среднее значение расстояния оценочного местоположения излучателя от источника) предлагаемым способом практически линейно фиг.7 возрастает с увеличением погрешности пеленгования.
По сравнению с ближайшим аналогом [2] предлагаемое решение обеспечивает идентификацию при неизвестных уровнях помех, достигается повышение достоверности идентификации, как вследствие стабилизации вероятности правильной идентификации, так и уменьшения уровня ложной тревоги, увеличивается точность определения местоположения излучателя. В частности, при одинаковом числе квантов шаг квантования области объекта уменьшается, относительно равномерного квантования в ближайшем аналоге, в π·Rs/Δ раз, соответственно увеличивается инструментальная точность определения местоположения излучателя объекта. Это увеличение точности достигает для принятых параметров системы радиоконтроля трех порядков.
Способ идентификации радиосигналов контролируемого объекта и определения местоположения источника, включающий предварительное определение рабочей зоны, в ней области объекта, прием радиосигналов в пунктах приема с помощью пеленгаторных антенн и многоканального приемного устройства, отличающийся тем, что для каждого пункта приема оценивают распределение уровня помех в рабочей зоне, для чего измеряют энергию принятых радиосигналов, преобразуют их в пространственный спектр, который вычитают из измеренной энергии, затем определяют среднее геометрическое распределение уровня помех, его минимумы в области объекта и вне объекта, значения минимумов сравнивают, по результатам чего идентифицируют радиосигналы и определяют местоположение источника как положение минимума в области объекта, при этом преобразование в пространственный спектр выполняют путем компенсации, с учетом расстояний от пеленгаторных антенн до источников, расчетных набегов фаз принятых радиосигналов, последующего суммирования преобразованных радиосигналов, квадратичного детектирования суммарного радиосигнала и деления на число пеленгаторных антенн, при этом рабочую зону определяют в виде круга с центром в геометрическом центре объекта и квантуют, исходя из заданной точности определения местоположения источника контролируемого объекта, по закону спирали Архимеда, при этом комплексные координаты квантов как мест возможного излучения определяют по формуле где x, y - абсцисса и ордината ν-го кванта в декартовой системе координат, ν=0,1,…,V-1 - номер кванта, i - мнимая единица, Δ - заданная точность определения местоположения, V=R/Δ - число квантов, R - радиус рабочей зоны.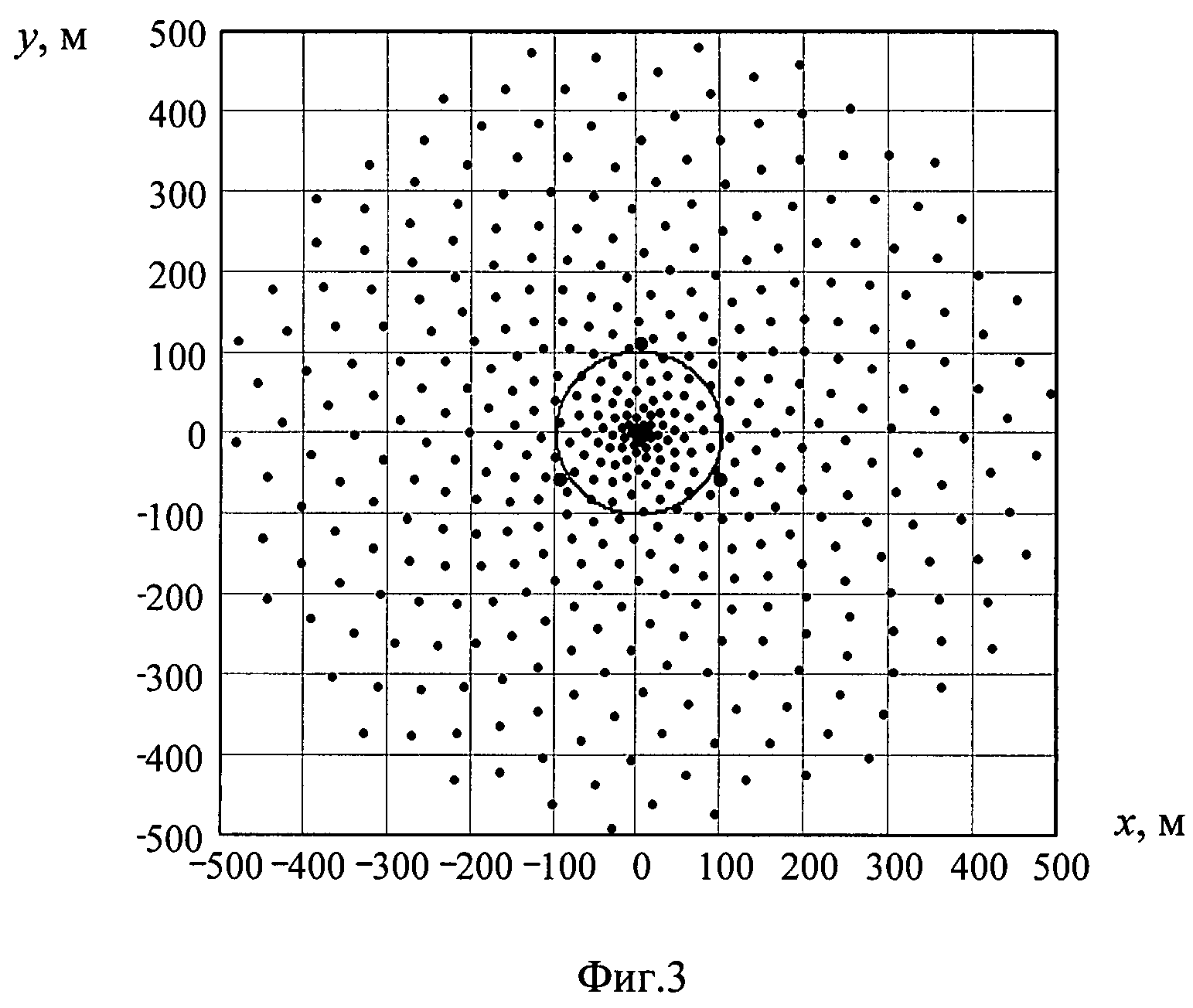

Способ определения структуры симплексной радиосети мобильным пеленгатором
Способ извлечения кофеина из водного раствора
Способ амплитудной, фазовой и частотной модуляции высокочастотных сигналов и многофункциональное устройство его реализации
Способ радиолокационного измерения заряда частиц облаков и осадков
Способ определения высоты верхней границы мощной конвективной облачности
Способ демодуляции и фильтрации фазомодулированных сигналов и устройство его реализации
Устройство восстановления работоспособности системы, резервированной с помощью мажоритарных элементов
Способ генерации высокочастотных сигналов и устройство его реализации
Способ генерации высокочастотных сигналов и устройство его реализации
Способ амплитудно-фазовой модуляции высокочастотного сигнала и устройство его реализации
Способ амплитудно-фазовой модуляции высокочастотного сигнала и устройство его реализации

