Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА РАКЕТЫ, РЕГУЛЯРНО ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к способу и системам управления летательными аппаратами, регулярно вращающимися по углу крена, и может быть использовано в системах управления ракетами, формирующими на борту команды управления, при установке ракеты на пусковой установке с начальным углом крена отличным от нуля.
Известен способ формирования команд управления на ракете и ракета, вращающаяся по углу крена, реализующая этот способ [Патент России №2362108 от 24.09.07 г., МКИ7 F41G 7/00], в которых с помощью датчика магнитного поля Земли определяют величину угла крена ракеты. Однако влияние на величину сигнала датчика магнитного поля Земли, например, пусковой установкой, изготовленной из магнитного материала, с которой стартует ракета, приводит соответственно к искажениям измеряемого на ракете магнитного поля Земли. Это ограничивает область применения известного технического решения, т.к. оно начинает функционировать после старта и удаления ракеты от пусковой установки.
Известен способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой, основанная на нем [Патент России №2351875 от 02.05.07 г., МКИ7 F41G 7/00]. Известное техническое решение включает в себя способ определения угла крена ракеты, регулярно вращающейся по углу крена, и устройство его реализующее, выбранные в качестве прототипов.
Известный способ определения угла крена ракеты, регулярно вращающейся по углу крена, включает измерение и интегрирование по времени скорости вращения ракеты по углу крена, при котором длительность интегрирования соответствует равным угловым интервалам 22,5°.
Известное устройство определения угла крена ракеты, регулярно вращающейся по углу крена, реализующее этот способ, содержит датчик угловой скорости, выход которого соединен с интегрирующим входом сбрасываемого интегратора, задающий вход которого подключен к задатчику углового интервала и устройство установки в исходное состояние, выход которого соединен со входами установки в исходное состояние сбрасываемого интегратора и синус - косинусного преобразователя, счетный вход которого соединен с выходом сбрасываемого интегратора.
При этом величины синусного и косинусного сигналов согласно тригонометрическим функциям определяют величину угла крена ракеты. Кроме того, под исходным состоянием далее по тексту понимают нулевой уровень на выходе интегратора, при котором величина начального угла крена ракеты φ0=0°.
Недостатком известных способа определения угла крена ракеты, регулярно вращающейся по углу крена, и устройства, реализующего этот способ, является недостаточно высокая точность определения угла крена ракеты, т.к. при интегрировании угловой скорости накапливается величина ошибки измерения, которая прямо пропорциональна времени работы. Кроме того, не учитывается величина начального угла крена ракеты, поскольку в общем случае φ0≠0°.
Задачей предлагаемой группы изобретений является повышение точности определения угла крена ракеты за счет исключения накопления величины ошибки измерения и учета величины начального угла крена ракеты.
Поставленная задача решается в способе определения угла крена ракеты, регулярно вращающейся по углу крена, включающем измерение угловой скорости вращения ракеты и интегрирование соответствующего ей по времени сигнала, при котором длительность интегрирования соответствует равным угловым интервалам, новым является то, что до старта ракеты измеряют или заранее задают величину ее начального угла крена φ0, запоминают соответствующий ей сигнал и с него начинают интегрирование сигнала угловой скорости вращения ракеты, при достижении интегрированной величины сигнала, соответствующей углу крена ракеты равному 360°, устанавливают интегратор в нулевое состояние, после чего процесс интегрирования повторяют, при этом дополнительно используют на ракете датчик магнитного поля Земли, сигнал которого преобразуют в прямоугольные колебания с угловым интервалом 360°, вырабатывают в заданный момент времени сигнал, разрешающий прохождение фронтов спада и нарастания прямоугольных колебаний, в момент прохождения первого фронта спада или нарастания измеряют величину интегрированного сигнала A1, соответствующую величине угла крена ракеты φ1, при выполнении условия φмакс>φ1>φмин запоминают величину интегрированного сигнала A1, где φмакс и φмин - соответственно максимальная и минимальная назначенные величины угла крена ракеты, а при невыполнении условия запоминают величину интегрированного сигнала А2, соответствующую величине угла крена ракеты φ2 в момент прохождения последующего фронта, противоположного первому, причем после запоминания величины интегрированных сигналов A1 или А2 в моменты прохождения последующих фронтов того же значения выставляют ими запомненную соответствующую величину сигнала, с которой продолжают интегрирование.
Устройство определения угла крена ракеты, регулярно вращающейся по углу крена, содержит устройство установки и последовательно соединенные датчик угловой скорости и сбрасываемый интегратор, новым является то, что оно снабжено формирователем начального угла крена, устройством выборки, корректирующим устройством, а также последовательно соединенными датчиком магнитного поля Земли и формирователем прямоугольных колебаний, при этом выход устройства установки соединен с первыми входами устройства выборки и корректирующего устройства, выход формирователя прямоугольных колебаний соединен со вторым входом устройства выборки, выход формирователя начального угла крена соединен со вторым входом корректирующего устройства, третий вход которого соединен с выходом устройства выборки, третий вход устройства выборки и четвертый вход корректирующего устройства соединены с выходом сбрасываемого интегратора, второй вход которого соединен с выходом корректирующего устройства.
При этом сбрасываемый интегратор содержит последовательно соединенные корректируемый интегратор и первый компаратор, второй вход которого соединен с источником сигнала, величина которого соответствует 360°, при этом второй вход корректируемого интегратора является первым входом сбрасываемого интегратора, вторым входом которого является третий вход корректируемого интегратора, выходом сбрасываемого интегратора является выход корректируемого интегратора.
Устройство выборки содержит последовательно соединенные первый регистр, второй компаратор, логическую схему исключающее ИЛИ, пятую логическую схему И и пятую логическую схему ИЛИ, последовательно соединенные первый D триггер, первую логическую схему И и третью логическую схему ИЛИ, а также последовательно соединенные второй D триггер и вторую логическую схему И, выход которой соединен со вторым входом третьей логической схемы ИЛИ, последовательно соединенные вторую логическую схему НЕ, третью логическую схему И, четвертую логическую схему ИЛИ и шестую логическую схему И, выход которой соединен со вторым входом пятой логической схемой ИЛИ, при этом D входы первого и второго D триггеров подключены к источнику логической единицы, а их R входы - к выходам, соответственно, первой и второй логических схем ИЛИ, вторые входы которых соединены с выходами, соответственно, второго и первого D триггеров, подключенных к входам, соответственно, первой и второй логических схем НЕ, выход первой логической схемы НЕ соединен с первым входом четвертой логической схемы И, вторые входы первой и третьей логических схем И и С вход первого D триггера соединены с первым выходом формирователя разрешенных сигналов, второй выход которого соединен со вторыми входами второй и четвертой логическими схемами И и С входом второго D триггера, выход четвертой логической схемы И соединен со вторым входом четвертой логической схемой ИЛИ, выход первого RS триггера соединен с С входом первого регистра, выход которого соединен с первым входом третьего компаратора, выход которого соединен со вторым входом логической схемы исключающее ИЛИ, инвертированный выход которой соединен с первым входом шестой логической схемы И, вторые входы второго и третьего компараторов соединены соответственно с источниками меньшей и большей величины напряжений или двоичных чисел порогов срабатывания, выход третьей логической схем ИЛИ соединен с входом S первого RS триггера и вторым вход пятой логической схемы И, при этом R вход первого RS триггера, первые входы первой и второй логических схем ИЛИ являются первым входом устройства выборки, вторым входом которого является первый вход формирователя разрешенных сигналов, D вход первого регистра является третьим входом устройства выборки, выходом которого является выход пятой логической схемы ИЛИ.
Корректирующее устройство содержит последовательно соединенные второй RS триггер, седьмую логическую схему И и формирователь сигналов установки, а также третий RS триггер, выход которого соединен с С входом второго регистра и входом устройства задержки, выход которой соединен с S входом второго RS триггера, выход второго регистра соединен со вторым входом формирователя сигналов установки, при этом входы R второго и третьего RS триггеров и третий вход формирователя сигналов установки являются первым входом корректирующего устройства, вторым входом которого являются четвертый вход формирователь сигналов установки, второй вход седьмой логической схемы И и S вход третьего RS триггера являются третьим входом корректирующего устройства, четвертым входом которого является D вход второго регистра, выход формирователя сигналов установки является выходом корректирующего устройства.
Заявленный способ определения угла крена ракеты, регулярно вращающейся по углу крена, реализуется следующим образом. До старта ракеты измеряют или заранее задают величину начального угла крена ракеты φ0, т.е. сигнал ей соответствующий A0, который запоминают на ракете.
С этой начальной величины сигнала начинают интегрирование сигнала угловой скорости вращения ракеты после старта. При достижении интегрированной величины сигнала соответствующей величине угла крена ракеты 360°, устанавливают интегратор в нулевое состояние. После чего процесс интегрирования повторяют.
Таким образом, вначале измеряется угол крена ракеты от φ0 до 360°, а затем далее от 0° до 360°. При этом величина начального угла крена ракеты определяется ориентацией, с которым ракета расположена на пусковой установке, например, отсчитываемый относительно вертикали.
Следовательно, корректируя величину текущего угла крена ракеты, определяемую из измеряемой величины угловой скорости вращения ракеты, учитывают величину начального угла крена ракеты φ0≠0°. При этом длительность интегрирования соответствует угловым интервалам 360° (кроме первого цикла, учитывающего величину φ0).
Величина сигнала датчика магнитного Земли является знакопеременной и зависит от чувствительности конкретного датчика магнитного поля Земли и ее величины, а также от расположения продольной оси ракеты относительно магнитного поля Земли и может быть смещена относительно нуля. Поэтому преобразуют этот сигнал, например, с помощью компаратора, срабатывающего по нулевому уровню в прямоугольные колебания с угловым интервалом 360°.
Вырабатывают в заданный момент времени сигнал, разрешающий прохождение фронтов спада и нарастания прямоугольных колебаний, в момент прохождения первого (любого) из этих фронтов, например, фронта спада измеряют величину интегрированного сигнала A1, соответствующую величине угла крена ракеты φ1, что следует из

где А - амплитуда интегрированного сигнала, соответствующая величине углового интервала 360°.
При выполнении условия

запоминают величину интегрированного сигнала A1, соответствующую величине угла крена ракеты φ1, где φмакс и φмин - соответственно максимальная и минимальная назначенные величины угла крена ракеты, которым соответствуют назначенные величины напряжений Емакс и Емин.
А при не выполнении условия (2) в момент прохождения последующего за прошедшим первым фронтом, фронта соответственно нарастания или спада (противоположного первому) запоминают величину интегрированного сигнала А2, соответствующую величине угла крена ракеты φ2. Поскольку, после первого фронта спада проходит всегда фронт нарастания и наоборот.
После запоминания величины A1 или А2 сигналов, соответствующих величине φ1 или φ2 в моменты прохождения этих же последующих фронтов (один из которых запомнил величину φ1 или φ2) выставляют фронтами того же значения запомненную величину интегрированного сигнала, соответственно A1 или А2, с которой продолжают интегрирование.
Таким образом, величину текущего угла крена ракеты, определяемую из измеряемой величины угловой скорости вращения ракеты, дополнительно корректируют, используя сигналы датчика магнитного поля Земли, что исключает накопление величины ошибки измерения при интегрировании угловой скорости вращения ракеты за время не более двух периодов вращения ракеты с момента разрешения прохождения импульсов.
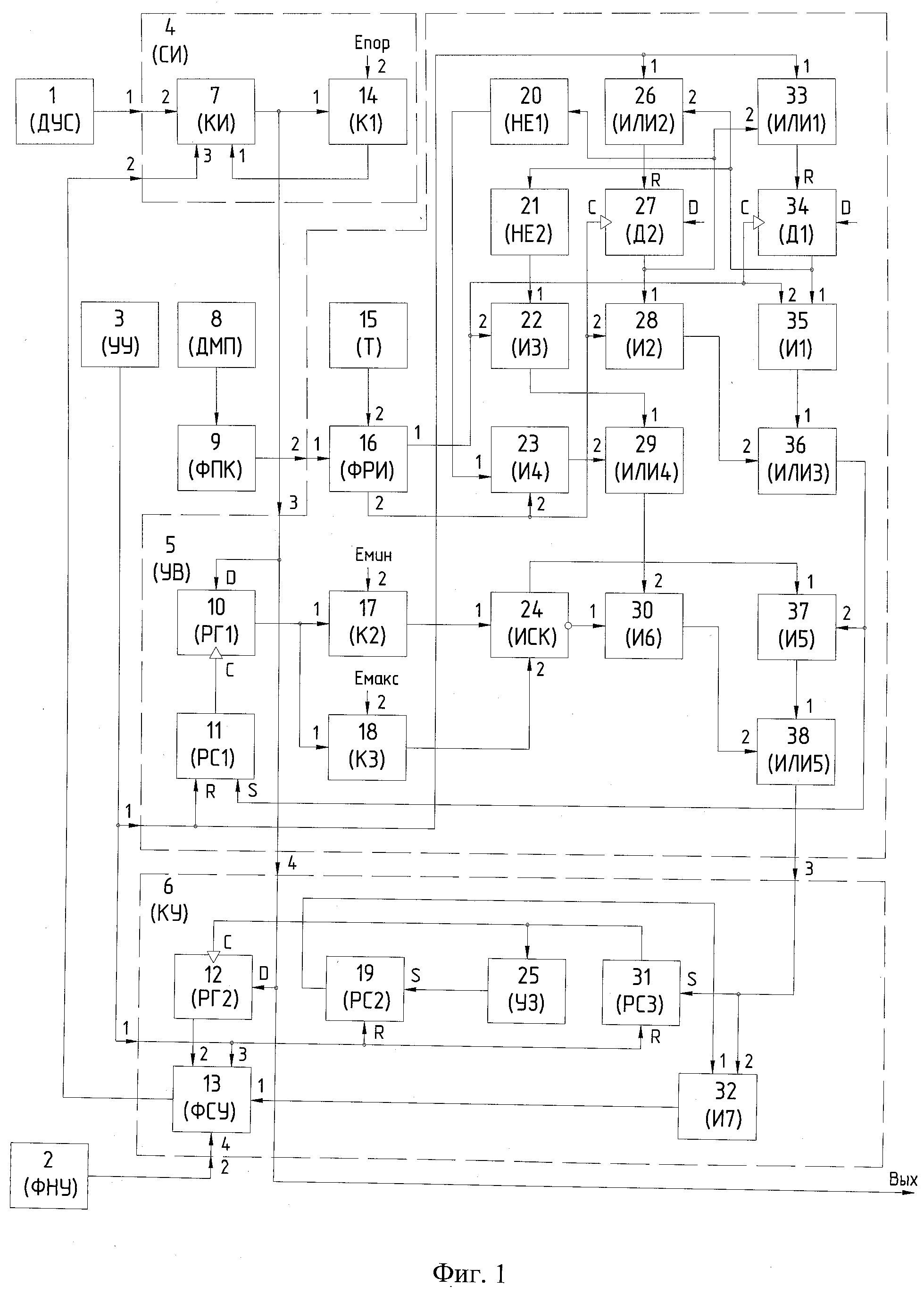
Предлагаемое изобретение поясняется чертежами, приведенными на фиг.1 и 2. На фиг.1 представлена структурная электрическая схема устройства определения угла крена ракеты, регулярно вращающейся по углу крена, где
1 - датчик угловой скорости (ДУС);
2 - формирователь начального угла крена (ФНУ);
3 - устройство установки (УУ);
4 - сбрасываемый интегратор (СИ);
5 - устройство выборки (УВ);
6 - корректирующее устройство (КУ);
7 - корректируемый интегратор (КИ);
8 - датчик магнитного поля Земли (ДМП);
9 - формирователь прямоугольных колебаний (ФПК);
10 и 12 - первый и второй регистры соответственно (РГ1 и РГ2);
11, 19 и 31 - первый, второй и третий RS триггеры соответственно (РС1, РС2 и РС3);
13 - формирователь сигналов установки (ФСУ);
14, 17 и 18 - первый, второй и третий компараторы соответственно (К1, К2 и К3);
15 - таймер (Т);
16 - формирователь разрешенных сигналов (ФРС);
20, 21 - первая и вторая логические схемы НЕ соответственно (НЕ1 и НЕ2);
35, 28, 22, 23, 37, 30 и 32 - первая, вторая, третья, четвертая, пятая, шестая и седьмая логические схемы И соответственно (И1, И2, И3, И4, И5, И6 и И7);
24 - логическая схема исключающее ИЛИ (ИСК);
25 - устройство задержки (УЗ);
33, 26, 36, 29 и 38 - первая, вторая, третья, четвертая и пятая логические схемы ИЛИ соответственно (ИЛИ1, ИЛИ2, ИЛИ3, ИЛИ4 и ИЛИ5).
ЕПОР - величина напряжения или числа, соответствующая величине угла крена ракеты 360°; ЕМИН и ЕМАКС - меньшая и большая величины напряжений или чисел порогов срабатывания соответственно второго 17 и третьего 18 компараторов. Входы D первого 34 и второго 27 D триггеров подключены к источнику питания, величина напряжения которого равна логической единице.
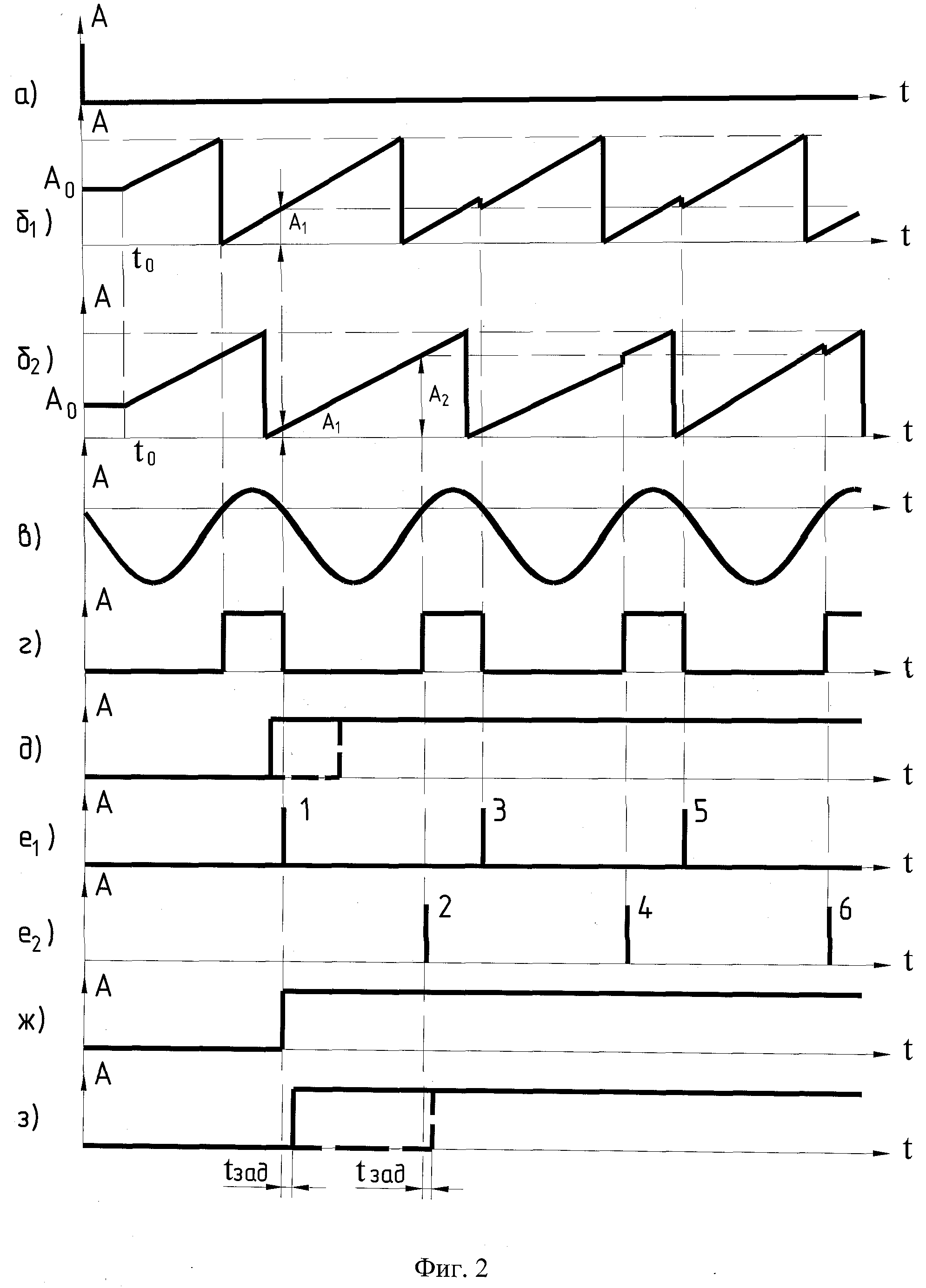
На фиг.2 приведены эпюры сигналов, где представлены:
"а" - сигнал на выходе устройства установки 3;
"б1" и "б2" - сигналы на выходе сбрасываемого интегратора 4 соответственно для первого и второго случаев;
"в" - сигнал на выходе датчика магнитного поля Земли 8;
"г" - сигнал на выходе формирователя прямоугольных колебаний 9;
"д" - сигнал на выходе таймера 15;
"e1" и "е2" - сигналы соответственно на первом и втором выходах формирователя импульсов 16;
"ж" - сигнал на выходе первого RS триггера 11;
"з" - сигнал на выходе второго RS триггера 19 для сигналов на входе S, приведенных на эпюре "e1" (сплошная линия - первый случай) или - "е2" (пунктир - второй случай).
В устройстве определения угла крена ракеты, регулярно вращающейся по углу крена, последовательно соединены датчик угловой скорости 1 и сбрасываемый интегратор 4. Последовательно соединены датчик магнитного поля Земли 8 и формирователь прямоугольных колебаний 9. Выход устройства установки 3 соединен с первыми входами устройства выборки 5 и корректирующего устройства 6. Выход формирователя прямоугольных колебаний 9 соединен со вторым входом устройства выборки 5. Выход формирователя начального угла крена 2 соединен со вторым входом корректирующего устройства 6, третий вход которого соединен с выходом устройства выборки 5. Третий вход устройства выборки 5 и четвертый вход корректирующего устройства 6 соединены с выходом сбрасываемого интегратора 4, второй вход которого соединен с выходом корректирующего устройства 6.
Датчик угловой скорости 1 и устройство установки 3 могут быть выполнены как в прототипе [Патент России №2351875 от 02.05.07 г., МКИ F41G 7/00]. Датчик магнитного поля Земли 8, например, магнито-чувствительный датчик KMZ 51 фирмы "Philips". Формирователь начального угла крена 2, например, выполнен как маятник, связанный механически с токосъемником, который снимает сигнал с кольцевого потенциометра, закрепленного на ракете и запитываемого от источника напряжения, величина которого соответствует углу крена ракеты равного 360°. Либо как в способе формирования команд управления ракетой и ракетном комплексе для его осуществления [Патент России №2258900 от 11.03.04 г., МКИ F41B 15/01], где заданы всего два исходных состояния ракеты на пусковой установки, соответствующие величинам начального угла крена ракеты 0° или 180°.
Корректируемый интегратор 7 может быть выполнен, например как аналоговый трехрежимный, включающий рабочий режим - собственно интегрирование, режим установки начальных условий - в данном случае установка начального угла крена φ0, т.е. электрического сигнала ему соответствующего [Л.Фолкенберри "Применения операционных усилителей и линейных ИС", Москва, Мир, 1985 г. стр.139-141 рис.6.12) и стр.137 рис 6.9], а также режим установки в нулевое состояние (там же стр.132 рис.6.6), либо как цифровой.
Формирователь прямоугольных колебаний 9, например, аналоговый компаратор. Первый 10 и второй 12 регистры можно выполнить на микросхемах, например 564ИР9. Первый 11, второй 19 и третий 31 RS триггеры выполнены, например, на микросхемах 564 серии. Формирователь сигналов установки 13, например, выполнен в виде двух электронных ключей (коммутаторов) [У.Титце, К.Шенк "Полупроводниковая схемо-техника", Москва, Мир, 1983 г. стр.277 рис.17.2], выходы которых соединены вместе.
Первый 14, второй 17 и третий 18 компараторы, например, аналоговые или цифровые компараторы. Формирователь разрешенных сигналов 16, например, два ждущих мультивибратора, срабатывающих соответственно по фронту спада и нарастания сигнала прямоугольных колебаний, при этом выходы первого и второго ждущих мультивибраторов соединены с первыми входами соответственно первой и второй логическими схемами И, причем первым входом формирователя импульсов являются входы первого и второго ждущих мультивибраторов, вторым входом - вторые входы первой и второй логической схемой И, а первым и вторым выходами являются выходы соответственно первой и второй логической схемой И.
Таймер 15, например, последовательно соединенные RC интегрирующая цепочка и компаратор, второй вход которого соединен с выходом делителя напряжения, выполненного на двух резисторах. На входы делителя напряжения и интегрирующей цепочки подается напряжение с момента старта ракеты.
Первая 20 и вторая 21 логические схемы НЕ, первая 35, вторая 28, третья 22, четвертая 23, пятая 37, шестая 30 и седьмая 32 логические схемы И, а также первая 33, вторая 26, третья 36, четвертая 29 и пятая 38 логические схемы ИЛИ выполнены, например, на соответствующих микросхемах 564 серии. Логическая схема исключающие ИЛИ 24 выполнена в виде последовательно соединенных собственно логической схемы исключающее ИЛИ и логической схемы НЕ.
Устройство задержки 25, например, два последовательно соединенных ждущих мультивибратора, второй из которых срабатывает по конечному фронту импульса с выхода первого. Первый 34 и второй 27 D триггеры, например, микросхема 564ТМ2,
Устройство определения угла крена ракеты (фиг.1), реализующее способ определения угла крена ракеты, регулярно вращающейся по углу крена, работает следующим образом. В первоначальный момент времени (перед стартом ракеты) при выходе на рабочий режим бортового источника питания устройство установки 3 формирует разовый импульс (эпюра "а" на фиг.2).
Этот импульс поступает на первый вход корректирующего устройства 6, а именно на третий вход формирователя сигналов установки 13, являющимся, например, входом управления первого электронного ключа. На второй вход корректирующего устройства 6, а значит и на четвертый вход формирователя сигналов установки 13, являющимся например, соответственно входом коммутации первого электронного ключа, поступает электрический сигнал величиной A0, соответствующий величине угла φ0 с выхода формирователя начального угла крена 2, определяемый величиной угла крена ракеты, с которым она расположена на пусковой установке. Сигнал с выхода соответственно первого электронного ключа, являющегося выходом формирователя сигналов установки 13, а значит и выходом корректирующего устройства 6 поступает на второй вход сбрасываемого интегратора 4, являющегося третьим входом корректируемого интегратора 7 и устанавливает на его выходе величину сигнала начального угла крена A0.
Таким образом, до момента начала вращения ракеты по углу крена на выходе сбрасываемого интегратора 4 сформируется сигнал величиной A0, соответствующий величине начального угла крена φ0 (эпюра "б1" или "б2" до момента и в момент времени t0 на фиг.2, где t0 - начало вращения ракеты по углу крена после ее старта).
В исходном состоянии при выходе бортового источника питания на рабочий режим, формируемый разовый импульс (эпюра "а" на фиг.2) с выхода устройства установки 3 поступает также на первый вход устройства выборки 5, а именно: на R вход RS триггера 11 и первые входы первой 33 и второй 26 логических схем ИЛИ. Этот же сигнал с входов первой 33 и второй 26 логических схем ИЛИ поступает на R входы соответственно первого 34 и второго 27 D триггеров и устанавливает на их выходах нулевые логические уровни. При этом сигнал на R входе RS триггера 11 устанавливает на его выходе также нулевой логический уровень.
С момента начала вращения ракеты по углу крена, датчик угловой скорости 1 измеряет скорость вращения ракеты и электрический сигнал с его выхода поступает на первый вход сбрасываемого интегратора 4, а значит и на второй вход корректируемого интегратора 7. На выходе корректируемого интегратора 7 с величины сигнала А0, соответствующей φ0 и с момента времени to начинает формироваться интегрированный сигнал (эпюра "б1" или "б2" на фиг.2), который поступает на первый вход первого компаратора 14, на второй вход которого поступает электрический сигнал, величина которого соответствует величине угла крена ракеты равной 360° и является его порогом срабатывания ЕПОР.
Следовательно, при достижении величины интегрированного сигнала более величины ЕПОР, на выходе первого компаратора 14 сформируется импульс, который поступит на первый вход корректируемого интегратора 7 и установит на его выходе нулевой уровень. Как следует из изложенного, далее процесс интегрирования повторяется уже без участия величины A0 (φ0).
Электрический сигнал датчика магнитного поля Земли 8 (эпюра "в" на фиг.2) поступает на вход формирователя прямоугольных колебаний 9, на выходе которого угловой интервал между фронтами нарастания или спада импульсов прямоугольных колебаний (эпюра "г" на фиг.2) постоянен и равен 2π(360°).
Сигнал с выхода формирователя прямоугольных колебаний 9 поступает на второй вход устройства выборки 5, а значит на первый вход формирователя разрешенных сигналов 16, на второй вход которого поступает сигнал разрешения с выхода таймера 15 (эпюра "д" на фиг.2). При наличии единичного логического уровня с выхода таймера 15 на первом и втором выходах формирователя разрешенных сигналов 16 сформируются, например, последовательности импульсов соответственно из фронтов спада (эпюра "e1" на фиг.2) и фронтов нарастания (эпюра "е2" на фиг.2) сигнала прямоугольных колебаний.
Сигналы (импульсы) с первого выхода формирователя разрешенных сигналов 16 (в данном случае, сформированные из фронтов спада) 1, 3, 5, и т.д. поступают на вход С первого D триггера 34. Импульсы со второго выхода формирователя разрешенных сигналов 16 (в данном случае сформированные из фронтов нарастания) 2, 4, 6, и т.д. поступают на вход С второго D триггера 27. На входы D первого 34 и второго 27 D триггеров поступает напряжение единичного логического уровня, например, от источника их питания.
Таким образом, первый появившийся импульс из последовательности 1, 3, 5, и т.д. (эпюра "e1" на фиг.2) с первого выхода формирователя разрешенных сигналов 16 поступает на вход С первого D триггера и записывает на его выходе единичный логический уровень до конца полета ракеты. Этот единичный логический уровень с его выхода поступает на второй вход второй логической схемы ИЛИ 26, а с ее выхода на R вход второго D триггера 27. При этом на выходе второго D триггера 27 устанавливается нулевой логический уровень до конца полета ракеты не зависимо от наличия импульсов на его С входе, т.к. сигнал (единичный логический уровень) на входе R имеет приоритет перед импульсами на входе С.
Единичный логический уровень с выхода первого D триггера 34 поступает так же на первый вход первой логической схемы И 35, на второй вход которой поступает последовательность импульсов 1, 3, 5, и т.д. с первого выхода формирователя разрешенных сигналов 16. Эта последовательность импульсов с выхода первой логической схемы И 35 (эпюра "e1" на фиг.2) поступает на первый вход третьей логической схемы ИЛИ 36.
Нулевой логический уровень с выхода второго D триггера 27 поступает на второй вход первой логической схемы ИЛИ 33, на выходе которой формируется нулевой логический уровень. Этот логический уровень поступает на R вход первого D триггера 34 и не оказывает ни какого влияния на его выходной сигнал. Нулевой логический уровень с выхода второго D триггера 27 поступает также на первый вход второй логической схемы И 28, на второй вход которой поступает в данном случае последовательность импульсов 2, 4, 6, и т.д. со второго выхода формирователя разрешенных сигналов 16 (эпюра "е2" на фиг.2).
На выходе второй логической схемы И 28 формируется нулевой логический уровень, который поступает на второй вход третьей логической схемы ИЛИ 36. При этом на ее выходе будет последовательность импульсов с первого входа третьей логической схемы ИЛИ 36.
Единичный логический уровень с выхода первого D триггера 34 поступает также на вход второй логической схемы НЕ 21. Инвертированный логический сигнал с ее выхода (нулевой логический уровень) поступает на первый вход третьей логической схемы И 22, на второй вход которой поступает последовательность импульсов 1, 2, 3, и т.д. с первого выхода формирователя разрешенных сигналов 16. С выхода третьей логической схемы И 22 нулевой логический уровень поступает на первый вход четвертой логической схемы ИЛИ 29.
Нулевой логический уровень с выхода второго D триггера 27 поступает также на вход первой логической схемы НЕ 20. Инвертированный логический сигнал с ее выхода (единичный логический уровень) поступает на первый вход четвертой логической схемы И 23, на второй вход которой поступает последовательность импульсов 2, 4, 6, и т.д. со второго выхода формирователя разрешенных сигналов 16. С выхода четвертой логической схемы И 23 эта последовательность импульсов поступает на второй вход четвертой логической схемы ИЛИ 29.
Таким образом, на выходе третей логической схемы ИЛИ 36 будет присутствовать последовательность импульсов, начинающаяся с первого импульса (фронта спада), а на выходе четвертой логической схемы ИЛИ 29 будет присутствовать последовательность импульсов, начинающаяся со второго импульса (фронты нарастания), соответствующие эпюрам "e1" и "е2" на фиг.2.
При отсутствии первого импульса в последовательности импульсов с первого выхода формирователя разрешенных сигналов 16, представленной в виде 3, 5, 7, и т.д. (эпюра "e1" на фиг.2, например, при сдвиге эпюры "д" немного вправо по оси t пунктир) первым прошедшим импульсом будет импульс 2 из последовательности 2, 4, 6, и т.д. со второго выхода формирователя разрешенных сигналов 16. При этом на выходе первого D триггера 34 будет до конца полета ракеты нулевой логический уровень, а на выходе второго D триггера 27 будет единичный логический уровень.
Нулевой логический уровень с выхода D триггера 34 запретит прохождение сигналов со второго входа первой логической схемы И 35 на ее выход. А единичный логический с выхода второго D триггера 27 разрешит прохождение сигнала со второго выхода формирователя разрешенных сигналов 16 через второй вход второй логической схемы И 28 на второй вход третьей логической схемы ИЛИ 36. При этом на ее выходе будет присутствовать вторая последовательность импульсов (эпюра "е2" на фиг.2), начинающаяся с первого прошедшего импульса (являющегося в данном случае вторым на эпюре "е2").
Нулевой логический уровень с выхода первого D триггера 34 поступает на вход второй логической схемы НЕ 21 и выставляет на ее выходе единичный логический уровень, который разрешает прохождение через второй вход третьей логической схемы И 22 сигнала с первого выхода формирователя разрешенных сигналов 16, т.е. первой последовательности импульсов (фронты спада), которые проходят через первый вход четвертой логической ИЛИ 29 на ее выход. При этом на втором входе логической схемы ИЛИ будет нулевой логический уровень. Это обусловлено тем, что единичный логический уровень с выхода второго D триггера 27 поступает через первую логическую схему НЕ 20 (нулевой логический уровень) на первый вход четвертой логической схемы И 23.
Таким образом, на выходе третьей логической схемы ИЛИ 36 всегда будет сигнал (последовательность импульсов), начинающаяся с первого прошедшего импульса: из совпадающей последовательности 1, 3, 5, и т.д. (эпюре "e1" фиг.2), либо с первого прошедшего импульса (изображенного вторым на эпюре "е2" фиг.2). А на выходе четвертой логической схемы ИЛИ 29 наоборот всегда будет присутствовать последовательность импульсов, начинающаяся со второго прошедшего импульса: из совпадающей последовательности 2, 4, 6, и т.д. (эпюре "е2" фиг.2), либо со второго прошедшего импульса (изображенного первым на эпюре "e1" фиг.2).
Следовательно, на выходе третьей логической схемы ИЛИ 36 всегда будет сигнал (последовательность импульсов с фронтами спада или нарастания), начинающаяся с первого импульса, т.е. 1', 3', 5' и т.д. - нечетные. А на выходе четвертой логической схемы ИЛИ 29 всегда будет сигнал (последовательность импульсов с фронтами нарастания или спада), начинающаяся со второго импульса, т.е. 2', 4', 6' и т.д. - четные. Причем, приведенные выше нечетные 1', 3', 5' и т.д., и четные 2', 4', 6' и т.д. импульсы в последовательностях не всегда совпадают с нумерацией импульсов (фронтов), приведенных на эпюрах "e1" и "е2" фиг.2, что отмечено выше.
На S вход RS триггера 11 (ранее установленного в нулевое состояние по R входу) поступает нечетная последовательность импульсов с выхода третьей логической схемы ИЛИ 36, в данном случае, например эпюра "e1" на фиг.2 (фронты спада).
Таким образом, на выходе первого RS триггера 11 сформирует разовый скачок напряжения из нулевого логического уровня в единичный (эпюра "ж" на фиг.2). Этот скачок своим фронтом запишет по входу С в первый регистр 10 величину интегрированного сигнала равную A1, поступающую с выхода сбрасываемого интегратора 4 через третий вход устройства выборки 5 на информационный вход (вход D) первого регистра 10.
Величина электрического сигнала A1, соответствующая φ1 (эпюра "б1" на фиг.2), с выхода первого регистра 10 поступает на первые входы второго 17 и третьего 18 компараторов, на вторые входы которых подаются соответственно первое ЕМИН и второе ЕМАКС величины напряжений, соответствующие назначенным величинам углов крена ракеты φмин и φмакс, например, 10° и 350° соответственно. Сигналы с выходов второго 17 и третьего 18 компараторов поступают соответственно на первый и второй входы логической схемы исключающейся ИЛИ 24.
Учитывая условие ЕМАКС>A1>ЕМИН на выходах второго 17 и третьего 18 компараторов будут разные логические уровни, а на не инвертированном выходе логической схемы исключающей ИЛИ 24 будет логическая единица (первый случай). При A1<ЕМИН или A1ЕМАКС на выходах второго 17 и третьего 18 компараторов будут одинаковые логические уровни (нулевые или единичные), а на не инвертированном выходе логической схемы исключающейся ИЛИ 24 будет логический нуль (второй случай).
Следовательно, при наличии логической единицы на не инвертированном выходе логической схемы исключающейся ИЛИ 24 (для первого случая эпюра "б1" на фиг.2), подаваемой на первый вход пятой логической схемы И 37, и присутствии на ее втором входе сигнала с выхода третьей логической схемы ИЛИ 36, на выходе пятой логической схемы И 37 будет последовательность импульсов, в данном случае приведенная на эпюре "e1" на фиг.2.
При наличии логической единицы на инвертированном выходе логической схемы исключающейся ИЛИ 24 (для второго случая эпюра "б2" на фиг.2), подаваемой на первый вход шестой логической схемы 30, и присутствии сигнала на ее втором входе с выхода четвертой логической схемы ИЛИ 29 (в данном случае эпюра "е2" на фиг.2), на выходе шестой логической схемы И 30 будет последовательность импульсов, приведенная в данном случае на эпюре "е2" на фиг.2.
Сигналы с выходов пятой 37 и шестой 30 логических схем И поступают соответственно на первый и второй входы пятой логической схемы ИЛИ 38, на выходе которой присутствуют выбранная одна из двух последовательностей импульсов нечетная или четная (в данном случае эпюры "e1" или "е2" на фиг.2) в соответствии с условиями (выражение 2).
В первоначальный момент времени разовый импульс с выхода устройства установки 3 устанавливает также по входам R второго 19 и третьего 31 RS триггеров нулевые логические уровни на их выходах.
Импульсы с выхода устройства выборки 5, т.е. логической схемы ИЛИ 38 поступают на третий вход корректирующего устройства 6, а именно: на S вход третьего RS триггера 31 и первый из них (эпюры "e1" или "е2" на фиг.2) устанавливает на его выходе логическую единицу вместо предыдущего логического нуля. Разовый фронт (из нулевого логического уровня в единичный), формируемый третьим RS триггером 31, поступает на вход С (записи) второго регистра 12 и записывает в него поступающий на вход D через четвертый вход корректирующего устройства 6 с выхода сбрасываемого интегратора 4 величину интегрированного сигнала соответственно A1 или A2 (эпюры "б1" или "б2" на фиг.2).
Как следует из изложенного выше величина сигнала A1, записанная ранее в первый регистр 10 для ее анализа, практически равна величине сигнала A1, записанной во второй регистр 12 для первого случая, приведенного на эпюре б1" фиг.2. Следовательно, выражение 2 выполняется также и в корректирующем устройстве 6 вторым регистром 12.
Одновременно сигнал с выхода третьего RS триггера 31 поступает на вход устройства задержки 25, с выхода которого он подается на S вход второго RS триггера 19. На выходе второго RS триггера 19 формируется скачок напряжения из нулевого логического уровня в единичны (на фиг.2 эпюра "з" соответственно сплошная линия для первого случая или пунктир для второго). Этот задержанный во времени на 1злд соответствующий скачок напряжения поступает на первый вход седьмой логической схемы И 32. На второй вход которой поступает сигнал с выхода устройства выборки 5 (эпюра "e1" или "е2" на фиг.2) через третий вход корректирующего устройства 6. На выходе седьмой логической схемы И 32 согласно эпюр, приведенных на фиг.2, выделяются соответственно третий и последующие импульсы при наличии последовательности импульсов, приведенной на эпюре "e1" фиг.2, т.е. при выполнении условия (выражение 2) или четвертый и последующие при невыполнении этого выражения.
Таким образом, последовательность импульсов без начального импульса, т.е. без первого (эпюра "e1" на фиг.2) или второго (эпюра "е2" на фиг.2) который осуществил запись величины A1 или А2 с выхода седьмой логической схемы И 32 поступает на первый вход формирователя сигналов установки 13, являющимся, например, входом управления второго электронного ключа. На второй вход которого, являющимся соответственно входом коммутации поступает запомненная величина сигнала A1 или A2 с выхода второго регистра 12. Сигнал с выхода соответственно второго электронного ключа, являющегося также выходом формирователя сигналов установки 13, а значит и выходом корректирующего устройства 6 поступает на второй вход сбрасываемого интегратора 4, являющегося третьим входом корректируемого интегратора 7 и устанавливает на его выходе величину сигнала A1 или А2, каждый раз когда присутствуют импульсы соответственно 3, 5, 7, и т.д. или 2, 4, 6 и т.д. соответственно.
На выходе корректируемого интегратора 7 в каждый момент следования последующих импульсов (без начального эпюры "e1" или "е2" на фиг.2) скачкообразно изменяется амплитуда сигнала, при этом ее величина выставляется равной величине A1 или А2 (эпюра "б1" или "б2" на фиг.2), с которой продолжается интегрирование до величины сигнала соответствующей величине угла крена ракеты 360°.
Как отмечалось ранее при сдвиге вправо по оси времени эпюры "д" фиг.2 (пунктир) порядок следования импульсных сигналов, приведенных на эпюрах "e1" и "е2" на фиг.2 изменится, при этом эпюра "e1" начинается со второго импульса, т.е. 2, 4, 6, и т.д., соответствующих фронтам спада, а эпюра "е2" - с первого импульса, т.е. 1, 3, 4 и т.д., соответствующих фронтам нарастания. При этом аналогично осуществляют коррекцию интегрированного сигнала в корректируемом интеграторе 7.
Таким образом, на выходе формирователя сигналов установки 13 в первоначальный момент времени (с момента наличия разового импульса с выхода устройства установки 3) формируется разовый импульсный сигнал A0, соответствующий φ0, а затем в моменты наличия последующих импульсов (после начального) с выхода седьмой логической схемы И 32 - сигналы величиной A1 или А2, соответствующие φ1 или φ2.
Как следует из описания заявленного технического решения и фиг.2 (эпюра "б2") начало коррекции измеренной величины угла крена ракеты производится по истечению не более двух периодов вращения (максимально возможная величина) с момента формирования сигнала разрешения (эпюра "д" на фиг.2).
Сигналы с целью упрощения эпюр на фиг.2 приведены для постоянной величины угловой скорости вращения ракеты по углу крена. При этом, приведенное описание функционирования заявленного технического решения согласно выражения (1), справедливо также и при изменении угловой скорости вращения ракеты по углу крена.
Длительность разового импульсного сигнала с выхода устройства установки 3, а также импульсов с выхода седьмой логической схемы И 32 должна быть (например, при приведенной выше аналоговой реализации) достаточной для заряда корректируемого интегратора 7 до данных приведенных величин. При этом постоянная времени заряда для данных приведенных величин должна быть (по первому входу корректируемого интегратора) на два три порядка меньше постоянной времени интегрирования по электрическому сигналу с датчика угловой скорости 1 (по его второму входу).
Кроме того, для исключения возможности прохождения первого (нечетного) импульса через пятую логическую схему И 37 раньше, чем сформируется логический уровень на выходе логической схемы исключающее ИЛИ 24, на второй вход пятой логической схемы И 37 следует подавать импульсный сигнал через задержку, например через RC интегрирующую цепочку.
Для упрощения описания наряду с цифровыми сигналами и устройствами (элементами) использованы и аналоговые. При этом, например, аналого-цифровые или цифро-аналоговые преобразователи для согласования аналоговых с цифровыми или цифровых с аналоговыми устройствами могут входить в состав этих устройств. Кроме того, в случае использовании цифровых сигналов требуется их синхронизация, например, при записи информации (двоичного числа) в первый 10 и второй 12 регистры.
Следовательно, предлагаемая группа изобретений способ определения угла крена ракеты, регулярно вращающейся по углу крена, и устройство для его осуществления, повышает точность определения угла крена на ракете за счет установки начального угла крена и исключения накопления величины ошибки измерения при интегрировании угловой скорости вращения ракеты за время не более двух периодов вращения ракеты.
Способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой для его осуществления, способ выделения импульсов установки на ракете, вращающейся по углу крена, и устройство выделения импульсов установки для его осуществления, способ измерения угла крена на ракете
Способ формирования команды управления одноканальной вращающейся по углу крена ракетой и устройство для его осуществления (варианты)
Лазерная полуактивная головка самонаведения
Способ наведения ракеты, управляемой лучом радиолокационной станции, и устройство для его осуществления
Селектор импульсов
Способ стрельбы миной и комплекс минометного вооружения, реализующий его
Лазерная полуактивная головка самонаведения
Способ сопровождения объекта и способ формирования сигнала управления положением луча приемно-передающего антенного устройства системы сопровождения объекта
Способ преобразования аналоговых сигналов в импульсную последовательность, модулированную по времени, и устройство для его реализации
Сетка визирного канала прицела пускового устройства противотанкового ракетного комплекса (птрк)
Способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой для его осуществления, способ выделения импульсов установки на ракете, вращающейся по углу крена, и устройство выделения импульсов установки для его осуществления, способ измерения угла крена на ракете
Способ формирования команды управления одноканальной вращающейся по углу крена ракетой и устройство для его осуществления (варианты)
Лазерная полуактивная головка самонаведения
Способ наведения ракеты, управляемой лучом радиолокационной станции, и устройство для его осуществления
Селектор импульсов
Способ стрельбы миной и комплекс минометного вооружения, реализующий его
Лазерная полуактивная головка самонаведения
Способ сопровождения объекта и способ формирования сигнала управления положением луча приемно-передающего антенного устройства системы сопровождения объекта
Способ преобразования аналоговых сигналов в импульсную последовательность, модулированную по времени, и устройство для его реализации
Сетка визирного канала прицела пускового устройства противотанкового ракетного комплекса (птрк)

