Результат интеллектуальной деятельности: СИСТЕМА УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ПОДРЕССОРЕННОЙ МАССЫ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
Изобретение относится к системе управления амортизацией подрессоренной массы транспортного средства для амортизации колебаний подрессоренной массы, которые возникают в кузове транспортного средства.
Уровень техники
Известна технология, называемая управлением амортизацией подрессоренной массой, для амортизации или подавления колебаний подрессоренной массы, которые возникают в кузове транспортного средства, посредством использования соответствующего средства амортизации колебаний. Например, технология управления движущей силой транспортного средства для того, чтобы амортизировать колебания подрессоренной массы транспортного средства, описана в публикации японской патентной заявки № 2006-69472 (JP-A-2006-69472). Согласно JP-A-2006-69472 движущая сила управляется посредством увеличения или уменьшения крутящего момента двигателя.
В то же время, управление амортизацией подрессоренной массы без необходимости выполняется в соответствии с возникновением колебаний подрессоренной массы всякий раз, когда колебания подрессоренной массы возникают в кузове транспортного средства. Например, водитель может не хотеть выполнения управления амортизацией подрессоренной массы, поскольку водитель чувствует дискомфорт, например, или поведение транспортного средства может стабилизироваться другим средством управления (использующим, например, систему стабилизации поведения транспортного средства или так называемую VSC) без необходимости выполнения управления амортизацией подрессоренной массы. В этом случае желательно уважать намерение водителя. Также, управление амортизацией подрессоренной массы может не выполняться правильно в зависимости от условий состояния или условий движения транспортного средства.
В WO 2008/050782 A1 раскрыто устройство управления амортизацией колебаний для подавления продольного и вертикального колебания транспортного средства посредством управления выходной мощностью приведения в движение на основе расчетного значения крутящего момента на колесе, рассчитанного с использованием скорости вращения колеса и т.д. В зависимости от степени проскальзывания колеса или от направления движения транспортного средства корректируется абсолютное значение или направление приложения расчетного крутящего момента на колесе. Также предоставляется устройство оценки крутящего момента на колесе, подходящее для управления амортизацией колебаний или других видов управления, таких как управление ходом амортизатора, движением и движущей силой транспортного средства или управление для ограничения движущей силы.
В EP 1632382 A2 раскрыта система управления устойчивостью транспортного средства, которая стабилизирует движение транспортного средства, управляя изменением мощности при движении в повороте в зависимости от изменения контактных нагрузок передних и задних колес. Система управления устойчивостью транспортного средства содержит блок вычисления основной требуемой движущей силы для вычисления основной требуемой движущей силы в зависимости от входного воздействия от водителя, блок расчета расчетной движущей силы для расчета движущей силы, формируемой в настоящий момент в транспортном средстве, блок расчета нарушения сопротивления движению и блок корректировки требуемой движущей силы для корректировки требуемой движущей силы в зависимости от основной требуемой движущей силы, расчетной движущей силы и сопротивления движению, при этом скорректированная требуемая движущая сила, полученная посредством блока корректировки требуемой движущей силы, формируется на ведущем колесе. Корректировка выполняется для того, чтобы подавлять продольные колебания, изменения в нагрузке на колесо или колебания при вертикальном перемещении кузова.
В DE 102008011575 A1 раскрыт способ устранения или уменьшения маятникового перемещения однополосного транспортного средства, в частности, мотоцикла, в котором определяется, по меньшей мере, угол крена и/или скорость крена транспортного средства, и выполняется управление тормозным давлением, по меньшей мере, на одном колесе и/или управление крутящим моментом приведения в движение.
В EP 1342610 A2 раскрыта силовая цепь транспортного средства, включающая в себя электродвигатель и сцепление между электродвигателем и приводимым в движение электродвигателем колесом. Свободный ход в силовой цепи между электродвигателем и колесом устраняется при определении того, что устранение свободного хода в силовой цепи необходимо для передачи крутящего момента электродвигателя к приводимому в движение электродвигателем колесу. Устранение свободного хода в силовой цепи включает в себя управление зацеплением сцепления и регулированием электродвигателя так, чтобы создавать очень небольшую величину крутящего момента электродвигателя, требуемого для устранения свободного хода в силовой цепи.
В EP 0743215 A2 раскрыто устройство вывода мощности, чтобы устранять пульсирующий компонент мощности, выводимой от двигателя, который вращает выходной вал посредством своей пульсирующей мощности.
Сущность изобретения
Настоящее изобретение предоставляет систему управления амортизацией подрессоренной массы, которая выполняет управление амортизацией подрессоренной массы при подходящих условиях, чтобы разрешать вышеописанные проблемы, встречающиеся в традиционном примере.
Согласно одному аспекту изобретения предоставляется система управления амортизацией подрессоренной массы транспортного средства, включающая в себя контроллер амортизации подрессоренной массы, который устанавливает величину управляющего воздействия по амортизации подрессоренной массы для амортизации колебаний подрессоренной массы, которые возникают в кузове транспортного средства в ответ на входное воздействие от дороги или требуемый водителем крутящий момент, и контроллер приведения в движение, который управляет выходным сигналом блока приведения в движение транспортного средства с тем, чтобы достигать величины управляющего воздействия по амортизации подрессоренной массы, таким образом, чтобы выполнять управление амортизацией подрессоренной массы. В системе управления амортизацией подрессоренной массы выполнение управления амортизацией подрессоренной массы разрешается или запрещается согласно, по меньшей мере, одному из: условий работы транспортного средства, условия состояния транспортного средства и требований водителя.
В системе управления амортизацией подрессоренной массы, как описано выше, может быть дополнительно предусмотрен блок настройки модели начала управления амортизацией подрессоренной массы, который устанавливает модель управления в момент начала управления амортизацией подрессоренной массы в одну из модели начала управления амортизацией подрессоренной массы для немедленного достижения величины управляющего воздействия по амортизации подрессоренной массы и модели начала управления амортизацией подрессоренной массы для постепенного достижения величины управляющего воздействия по амортизации подрессоренной массы согласно, по меньшей мере, одному из: условий работы транспортного средства, условий состояния транспортного средства и требований водителя, когда выполнение управления амортизацией подрессоренной массы разрешено, в то время как управление амортизацией подрессоренной массы не выполняется. Контроллер приведения в движение предпочтительно сконфигурирован так, чтобы управлять выходным сигналом блока приведения в движение транспортного средства на основе результата установки блока настройки модели начала управления амортизацией подрессоренной массы.
В системе управления амортизацией подрессоренной массы, как описано выше, может быть дополнительно предусмотрен блок настройки модели окончания управления амортизацией подрессоренной массы, который устанавливает модель управления в момент завершения управления амортизацией подрессоренной массы в одну из модели окончания управления амортизацией подрессоренной массы для немедленного окончания управления амортизацией подрессоренной массы и модели окончания управления амортизацией подрессоренной массы для постепенного окончания управления амортизацией подрессоренной массы согласно, по меньшей мере, одному из: условий работы транспортного средства, условий состояния транспортного средства и требований водителя, когда выполнение управления амортизацией подрессоренной массы запрещено, в то время как управление амортизацией подрессоренной массы выполняется. Контроллер приведения в движение предпочтительно сконфигурирован, чтобы управлять выходным сигналом блока приведения в движение транспортного средства на основе результата установки блока настройки модели окончания управления амортизацией подрессоренной массы.
Согласно другому аспекту изобретения предоставляется система управления амортизацией подрессоренной массы транспортного средства, включающая в себя контроллер амортизации подрессоренной массы, который устанавливает величину управляющего воздействия по амортизации подрессоренной массы для амортизации колебаний подрессоренной массы, которые возникают в кузове транспортного средства в ответ на входное воздействие от дороги или требуемый водителем крутящий момент, и контроллер приведения в движение, который управляет выходным сигналом блока приведения в движение транспортного средства с тем, чтобы достигать величины управляющего воздействия по амортизации подрессоренной массы, в которой управление амортизацией подрессоренной массы начинается или заканчивается согласно, по меньшей мере, одному из условий работы транспортного средства, условий состояния транспортного средства и требований водителя.
Вышеуказанные условия работы транспортного средства предпочтительно включают в себя скорость транспортного средства, положение передачи трансмиссии, установленной в транспортном средстве, рабочее состояние дроссельной заслонки и условия вращения ведущих колес. Вышеуказанные условия состояния транспортного средства предпочтительно включают в себя температуру электродвигателя, который приводит в действие дроссельную заслонку транспортного средства, состояния устройств или компонентов, относящихся к управлению амортизацией подрессоренной массы, и состояние электронного блока управления, предусмотренного для реализации управления амортизацией подрессоренной массы. Также, требования от водителя предпочтительно включают в себя состояние педали тормоза, управляемой водителем, и запрос водителя на выполнение управления амортизацией подрессоренной массы.
В системе управления амортизацией подрессоренной массы, как описано выше, предпочтительно, чтобы контроллер амортизации подрессоренной массы запрещал выполнение управления амортизацией подрессоренной массы или уменьшал величину управляющего воздействия по амортизации подрессоренной массы, когда выполняется управление по верхнему ограничению скорости для ограничения скорости транспортного средства до установленной верхней предельной скорости. В этом случае контроллер амортизации подрессоренной массы может запрещать выполнение управления амортизацией подрессоренной массы, когда скорость транспортного средства равна или превышает заданную скорость. Также, контроллер амортизации подрессоренной массы может уменьшать величину управляющего воздействия по амортизации подрессоренной массы, когда скорость транспортного средства увеличивается, когда скорость транспортного средства равна или превышает заданную скорость.
Вышеупомянутые колебания подрессоренной массы могут включать в себя, по меньшей мере, одни из: колебаний, возникающих в направлении вертикальных колебаний транспортного средства, и колебаний, возникающих в направлении продольных колебаний транспортного средства.
Согласно системе управления амортизацией подрессоренной массы, которая описана выше, управлению амортизацией подрессоренной массы может соответствующим образом быть разрешено или запрещено выполняться при различных условиях. Кроме того, система управления амортизацией подрессоренной массы транспортного средства может начинать управление амортизацией подрессоренной массы согласно соответствующей модели начала управления амортизацией подрессоренной массы, которая определяется в зависимости от различных условий, и может заканчивать управление амортизацией подрессоренной массы, которое выполняется согласно соответствующей модели окончания управления амортизацией подрессоренной массы, которая определяется в зависимости от различных условий.
Краткое описание чертежей
Признаки, преимущества и техническое и промышленное значение этого изобретения будут описаны в последующем подробном описании примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые элементы, и на которых:
Фиг. 1 - вид, показывающий транспортное средство, в котором используется система управления амортизацией подрессоренной массы согласно одному варианту осуществления изобретения;
Фиг. 2 - вид, полезный для объяснения переменных состояния колебаний подрессоренной массы в системе управления амортизацией подрессоренной массы согласно варианту осуществления изобретения;
Фиг. 3 - схематический чертеж в форме блок-схемы управления, показывающий один пример конфигурации системы управления амортизацией подрессоренной массы согласно первому варианту осуществления изобретения;
Фиг. 4 - вид, объясняющий один пример динамической модели колебаний подрессоренной массы, построенной посредством системы управления амортизацией подрессоренной массы согласно первому варианту осуществления изобретения;
Фиг. 5 - вид, объясняющий другой пример динамической модели колебаний подрессоренной массы, построенной посредством системы управления амортизацией подрессоренной массы согласно первому варианту осуществления изобретения;
Фиг. 6 - схематический чертеж в форме блок-схемы управления, показывающий один пример конфигурации системы управления амортизацией подрессоренной массы согласно второму варианту осуществления изобретения;
Фиг. 7 - вид, объясняющий один пример данных карты соответствия относительно коэффициента усиления верхнего ограничителя скорости для использования в управлении верхним ограничением скорости второго варианта осуществления изобретения;
Фиг. 8 - блок-схема последовательности операций, объясняющая операцию управления системы управления амортизацией подрессоренной массы, показанной на фиг. 6;
Фиг. 9 - схематический чертеж в форме блок-схемы управления, показывающий другой пример конфигурации системы управления амортизацией подрессоренной массы согласно второму варианту осуществления изобретения; и
Фиг. 10 - блок-схема последовательности операций, объясняющая операцию управления системы управления амортизацией подрессоренной массы, показанной на фиг. 9.
Подробное описание вариантов осуществления изобретения
Некоторые варианты осуществления систем управления амортизацией подрессоренной массы изобретения будут описаны подробно со ссылкой на чертежи. Следует понимать, что изобретение не ограничено этими вариантами осуществления.
Система управления амортизацией подрессоренной массы транспортного средства согласно первому варианту осуществления изобретения будет описана со ссылкой на фиг. 1-5.
Система управления амортизацией подрессоренной массы первого варианта осуществления составляет одну функцию электронного блока 1 управления (ЭБУ), который показан на фиг. 1. Электронный блок 1 управления состоит, в основном, из центрального процессора (ЦП), постоянного запоминающего устройства (ПЗУ), в котором определенные программы управления и т.п. сохранены заранее, оперативного запоминающего устройства (ОЗУ), которое временно хранит результаты вычислений ЦП, резервного ОЗУ, которое хранит информацию, подготовленную заранее, и т.д., которые не иллюстрированы на фиг. 1.
Фиг. 1 иллюстрирует пример транспортного средства 10, в котором используется система управления амортизацией подрессоренной массы этого варианта осуществления. Транспортное средство 10, проиллюстрированное на фиг. 1, является, например, FR- (заднеприводным с передним расположением двигателя) транспортным средством, которое передает выходную мощность (выходной крутящий момент) от источника мощности на передней стороне транспортного средства ведущим колесам WRR, WRL на задней стороне транспортного средства через устройство передачи мощности, такое как трансмиссия. Однако, следует понимать, что система управления амортизацией подрессоренной массы первого варианта осуществления может также быть использована в других типах транспортных средств, таких как FF- (переднеприводное с передним расположением двигателя) транспортное средство и полноприводное транспортное средство, а также в FR-транспортном средстве. Система этого варианта осуществления может также быть использована в транспортном средстве, имеющем расположенный в центре двигатель или расположенный сзади двигатель. Кроме того, система может также быть использована в так называемом гибридном транспортном средстве, имеющем, по меньшей мере, двигатель и электродвигатель в качестве своих источников мощности.
Двигатель 20, выступающий в качестве источника мощности, установлен как источник мощности в транспортном средстве 10. В примере, показанном на фиг. 1, двигатель 20 является двигателем внутреннего сгорания, который работает как тепловой двигатель, в котором топливо сжигается в камерах сгорания, чтобы формировать тепловую энергию, которая затем преобразуется в механическую энергию, и, таким образом, работает как поршневой двигатель, который выдает механическую мощность от выходного вала (коленчатого вала) за счет возвратно-поступательных движений поршней (не показаны). Более конкретно, двигатель 20 может быть в форме бензинового двигателя, использующего бензин в качестве топлива, или дизельного двигателя, использующего дизельное топливо в качестве топлива, например.
Двигатель 20 снабжен системой впрыска топлива (не показана). Работа системы впрыска топлива управляется контроллером двигателя электронного блока 1 управления. Когда двигатель 20 является дизельным двигателем, например, контроллер двигателя управляет выходной мощностью двигателя 20, управляя объемом впрыскиваемого топлива, и вызывает приложение крутящего момента на колесах (движущую силу на колесах), соответствующего выходной мощности двигателя, к ведущим колесам WRR, WRL, если нет изменений в положении передачи трансмиссии 30. А именно, двигатель 20 функционирует как блок приведения в движение транспортного средства, который регулирует величину крутящего момента на колесах (движущую силу на колесах) и способен создавать выходную мощность (крутящий момент приведения в движение, движущую силу) для достижения целевого крутящего момента на колесах (целевой движущей силы на колесах). Объем впрыска топлива (другими словами, целевой крутящий момент на колесах или целевая движущая сила на колесах или целевой крутящий момент приведения в движение транспортного средства или целевая движущая сила транспортного средства) определяется в соответствии с величиной воздействия водителем на педаль 41 акселератора, или требуемое значение устанавливается при автоматическом режиме движения или т.п. Величина воздействия на педаль 41 акселератора, например, давление на педаль, прикладываемое к педали 41 акселератора, или величина, на которую педаль 41 акселератора вдавливается (т.е., перемещение педали 41), обнаруживается или оценивается блоком 42 получения величины воздействия на педаль акселератора.
Выходной сигнал (крутящий момент приведения в движение, движущая сила) двигателя 20 передается трансмиссии 30, где скорость вращения изменяется согласно установленному в настоящий момент положению передачи или передаточному числу (скорости), и затем передается карданному валу 51. Трансмиссия 30 может быть, например, ручной трансмиссией или автоматической трансмиссией, имеющей два или более положения передач, или автоматической трансмиссией с бесступенчатым регулированием. В примере на фиг. 1 трансмиссия 30 является автоматической трансмиссией, имеющей два или более положения передач. Трансмиссия 30 снабжена устройством управления с гидравлическим приводом (не показано), и работа устройства управления с гидравлическим приводом управляется контроллером переключения передач электронного блока 1 управления. Контроллер переключения передач управляет устройством управления с гидравлическим приводом так, чтобы помещать трансмиссию 30 в целевое положение передачи, установленное на основе требуемой движущей силы на колесах, скорости транспортного средства и т.д. Величина выходного сигнала трансмиссии 30 изменяется в соответствии с положением передачи (передаточным числом). А именно, трансмиссия 30, когда переключается с одного положения передачи в другое, изменяет величину выходного сигнала на карданном валу 51, так что величина крутящего момента на колесах (движущей силы на колесах) ведущих колес WRR, WRL может регулироваться или управляться. Таким образом, трансмиссия 30 функционирует как блок приведения в движение транспортного средства, который изменяет свой выходной сигнал (крутящий момент приведения в движение, движущую силу) в соответствии с положением передачи или передаточным числом так, чтобы регулировать величину крутящего момента на колесах (движущей силы на колесах).
Крутящий момент карданного вала 51 передается дифференциальной передаче 52 и распределяется на правый и левый приводные валы 53RR, 53RL и затем передается в качестве крутящего момента на колесах (движущей силы на колесах) ведущим колесам WRR, WRL, соединенным с приводными валами 53RR, 53RL, соответственно.
Транспортное средство 10 движется вперед или назад посредством возникновения крутящего момента на колесах (движущей силы на колесах) на соответствующих ведущих колесах WRR, WRL. Транспортное средство 10 снабжено тормозной системой, которая останавливает транспортное средство 10 или уменьшает скорость транспортного средства 10, пока оно движется. Тормозная система выполнена с возможностью создания целевых тормозных моментов на колесах (целевых усилий торможения на колесах), величины которых индивидуально устанавливаются для соответствующих колес WFR, WFL, WRR, WRL. В примере на фиг. 1 используется давление тормозной жидкости, чтобы создавать трение между входящими в соприкосновение элементами, так что целевой тормозной момент на колесах (целевое усилие торможения на колесах) действует на каждое из колес WFR, WFL, WRR, WRL.
Тормозная система включает в себя педаль 61 тормоза, приспособленную для управления водителем, тормозной усилитель 62 для усиления давления педали, прикладываемого к педали 61 тормоза, главный цилиндр 63 для преобразования давления на педаль, усиленного тормозным усилителем 62, в давление тормозной жидкости, регулятор давления масла (который будет называться "тормозным актуатором") 64, способный регулировать давление тормозной жидкости до давлений, которые должны применяться к соответствующим колесам WFR, WFL, WRR, WRL, нагнетательные трубки 65FR, 65FL, 65RR, 65RL тормозной жидкости, через которые давления тормозной жидкости, которые прошли тормозной актуатор 64, передаются соответствующим колесам WFR, WFL, WRR, WRL, и устройства 66FR, 66FL, 66RR, 66RL создания усилий торможения, на которые давления тормозной жидкости подаются через нагнетательные трубки 65FR, 65FL, 65--RR, 65RL- тормозной жидкости, так что тормозные моменты на колесах (усилия торможения на колесах) возникают на соответствующих колесах WFR, WFL, WRR, WRL.
Каждое из устройств 66FR, 66FL, 66RR, 66RL создания усилия торможения является устройством фрикционного тормоза, которое выполняет действие торможения, прикладывая силу трения к элементу, который вращается как единое целое с соответствующим колесом WFR, WFL, WRR, WRL, таким образом, чтобы замедлять вращение колеса WFR-, WFL, WRR, WRL. Например, каждое из устройств 66FR, 66FL, 66RR, 66RL создания усилия торможения включает в себя тормозной диск (не показан), установленный как неотъемлемая часть на соответствующем колесе WFR, WFL, W--RR, W-RL-, тормозную колодку (не показана), в качестве фрикционного материала, которая прижимается к тормозному диску так, чтобы создавать силу трения, и суппорт (не показан), который закреплен на кузове транспортного средства и функционирует, чтобы подталкивать тормозную колодку по направлению к тормозному диску под давлением тормозной жидкости, подаваемого от тормозного актуатора 64. В устройстве 66FR, 66FL, 66RR, 66-RL создания усилия торможения тормозная колодка прижимается к тормозному диску с помощью прижимающего усилия, соответствующего давлению главного цилиндра или регулируемому давлению тормозной жидкости, подаваемой от тормозного актуатора 64. Соответственно, тормозной момент на колесах (усилие торможения на колесах), величина которого соизмерима с давлением главного цилиндра или регулируемым давлением тормозной жидкости, действует на каждое из колес WFR, WFL, WRR, WRL. В последующем описании тормозной момент и усилие торможения, создаваемое давлением главного цилиндра, будут называться "тормозным моментом с обычным рабочим давлением в главном цилиндре" и "усилием торможения с обычным рабочим давлением в главном цилиндре", соответственно. Также, тормозной момент и усилие торможения, создаваемые регулируемым давлением тормозной жидкости, полученным посредством увеличения давления главного цилиндра, будут называться "тормозным моментом с увеличенным рабочим давлением" и "усилием торможения с увеличенным рабочим давлением", соответственно.
Тормозной актуатор 64 состоит, в основном, из масляного резервуара (не показан), масляного насоса (не показан) и клапанов управления увеличением/уменьшением давления (не показаны) для увеличения или уменьшения давления главного цилиндра, чтобы обеспечивать давления тормозной жидкости для соответствующих нагнетательных трубок 65FR, 65FL, 65RR, 65RL тормозной жидкости. Масляный насос, клапаны управления увеличением/уменьшением давления и другие компоненты тормозного актуатора 64 управляются контроллером тормоза электронного блока 1 управления. Контроллер тормоза устанавливает целевой тормозной момент на колесах или целевое усилие торможения на колесах или целевой тормозной момент транспортного средства или целевое усилие торможения транспортного средства для каждого из колес WFR, WFL, WRR, WRL на основе величины воздействия водителем на педаль 61 тормоза или требуемого значения, если установлен автоматический режим движения, например. Величина воздействия на педаль 61 тормоза является давлением на педаль, прикладываемым к педали 61 тормоза, или величиной нажатия (или перемещения) педали 61 тормоза и обнаруживается или оценивается посредством блока 67 получения величины воздействия на педаль тормоза. Если тормозной момент с обычным рабочим давлением в главном цилиндре (усилие торможения с обычным рабочим давлением в главном цилиндре) меньше, чем целевой тормозной момент на колесах (целевое усилие торможения на колесах), контроллер тормоза определяет целевое давление тормозной жидкости, которое должно применяться к каждому из устройств 66FR, 66FL, 66RR, 66RL создания усилия торможения, которое может компенсировать нехватку тормозного момента (давления), и управляет тормозным актуатором 64 на основе целевого давления тормозной жидкости так, чтобы увеличивать давление главного цилиндра. С помощью этого управления тормозной момент с увеличенным рабочим давлением (усилие торможения с увеличенным рабочим давлением), который удовлетворяет целевому тормозному моменту на колесах (усилию торможения на тормозящем колесе) применяется к устройству 66FR, 66FL, 66RR, 66RL создания усилия торможения.
Кроме того, транспортное средство 10 снабжено устройствами 71FR, 71-FL, 71RR, 71RL получения скорости колеса для обнаружения скоростей соответствующих колес WFR, WFL, WRR, WRL. Например, датчик скорости колеса, который определяет скорость колеса, может быть использован в качестве устройства 71-FR, 71FL, 71RR, 71RL получения скорости транспортного средства.
Между тем, когда внешняя сила или крутящий момент (т.е., возмущение), вызванные неровными местами на дороге, например, применяется к колесам WFR, WFL, WRR, WRL транспортного средства 10 во время движения, внешняя сила или т.п. передается на кузов транспортного средства через колеса WFR, WFL, WRR, WRL и подвеску (не показана). Из-за входного воздействия (например, внешней силы) от дороги во время движения, которое передается на кузов транспортного средства через колеса WFR, W--FL, WRR, WRL и подвеску, колебания от 1 до 4 Гц, более точно, колебания приблизительно в 1,5 Гц (которые будут называться "колебаниями подрессоренной массы") могут возникать в кузове транспортного средства 10. Колебания подрессоренной массы включают в себя компонент (который будет называться "вертикальными колебаниями"), возникающий в вертикальном направлении (Z-направлении) транспортного средства 10 (строго говоря, вдоль вертикальной линии, проходящей через центр тяжести Cg транспортного средства), и компонент (который будет называться "продольными колебаниями"), возникающий продольном направлении (θ-направлении) около центра тяжести Cg транспортного средства. Когда возникают колебания подрессоренной массы, возникает, по меньшей мере, одно из вертикальных колебаний и продольных колебаний. Фиг. 2 иллюстрирует положение, занятое транспортным средством 10, когда носовая часть (т.е., передняя часть транспортного средства 10) поднята. Также, когда блок приведения в движение транспортного средства (т.е., двигатель 20 или трансмиссия 30) работает согласно запросу от водителя на приведение в движение или т.п., и изменения возникают в крутящем моменте на колесах (движущей силе на колесах) ведущих колес WRR, WRL, похожие колебания подрессоренной массы (по меньшей мере, одно из вертикальных колебаний и продольных колебаний) могут возникать в транспортном средстве 10.
Транспортное средство 10 первого варианта осуществления снабжено вышеупомянутой системой управления амортизацией подрессоренной массы, реализованной в качестве функции электронного блока 1 управления с тем, чтобы амортизировать колебания подрессоренной массы, как описано выше. Управление амортизацией подрессоренной массы относится к управлению для амортизации колебаний подрессоренной массы. Система управления амортизацией подрессоренной массы управляет крутящим моментом на колесах (движущей силой на колесах) ведущих колес WRR, WRL с помощью, по меньшей мере, одного из вышеупомянутых блоков приведения в движение транспортного средства (двигателя 20 и трансмиссии 30), чтобы, таким образом, амортизировать колебания подрессоренной массы, которые возникают в кузове транспортного средства.
В первом варианте осуществления конструируется динамическая модель колебаний подрессоренной массы (вертикальных колебаний и продольных колебаний) кузова транспортного средства, и переменные состояния колебаний подрессоренной массы вычисляются на основе динамической модели. Переменные состояния колебаний подрессоренной массы относятся к смещениям z, θ кузова транспортного средства и скоростям их изменения dz/dt, dθ/dt, когда требуемый водителем крутящий момент, соответствующий запросу от водителя на приведение в движение (более конкретно, крутящий момент на ведущих колесах WRR, WRL, в который преобразуется требуемый водителем крутящий момент), и текущий крутящий момент на колесах (более конкретно, расчетное значение крутящего момента на колесах) вводятся в динамическую модель. Затем, в первом варианте осуществления, требуемый водителем крутящий момент корректируется так, что переменные состояния сводятся к 0, т.е. так, чтобы регулировать выходной сигнал (крутящий момент приведения в движение, движущую силу) блока приведения в движение транспортного средства и, таким образом, амортизировать колебания подрессоренной массы.
Фиг. 3 является блок-схемой управления, схематически иллюстрирующей конфигурацию системы управления амортизацией подрессоренной массы. Система управления амортизацией подрессоренной массы включает в себя контроллер 2 приведения в движение для подачи запроса от водителя на приведение в движение транспортному средству 10 и контроллер 3 амортизации подрессоренной массы, который устанавливает величину управляющего воздействия по амортизации подрессоренной массы для амортизации колебаний подрессоренной массы (вертикальных колебаний и продольных колебаний) кузова транспортного средства.
Величина управляющего воздействия по амортизации подрессоренной массы относится к величине корректировки требуемого водителем крутящего момента Tw0 на колесах, который получается в блоке C5 в контроллере 3 амортизации подрессоренной массы, как будет описано позже. При управлении амортизацией подрессоренной массы величина корректировки требуемого водителем крутящего момента Tw0 на колесах применяется к ведущим колесам WRR, WRL, так что колебания подрессоренной массы амортизируются или подавляются. Таким образом, при управлении амортизацией подрессоренной массы величина корректировки требуемого водителем крутящего момента Tw0 на колесах преобразуется в единицу крутящего момента приведения в движение блока (C3) приведения в движение транспортного средства в блоке 3d преобразования для преобразования крутящего момента на колесах в крутящий момент приведения в движение (который будет описан позже), и выходной сигнал (крутящий момент приведения в движение, движущая сила) блока (C3) приведения в движение транспортного средства управляется контроллером 2 приведения в движение, который принимает величину корректировки крутящего момента приведения в движение.
Контроллер 2 приведения в движение выполняет управление выходным сигналом (управление крутящим моментом приведения в движение, управление движущей силой) в блоке (C3) приведения в движение транспортного средства, установленного в транспортном средстве 10. Контроллер 2 приведения в движение соответствует, по меньшей мере, одному из вышеупомянутых контроллера двигателя и контроллера переключения передач. Контроллер 2 приведения в движение, грубо говоря, разделен на блок (C1) вычисления требуемого водителем крутящего момента для получения требуемого водителем крутящего момента (другими словами, требуемого водителем крутящего момента приведения в движение) блока (C3) приведения в движение транспортного средства, соответствующего запросу приведения в движение, сделанному водителем, и блок (C2) определения команды управления, который определяет команду управления блоку приведения в движение транспортного средства на основе требуемого водителем крутящего момента.
Контроллер 2 приведения в движение преобразует запрос (C0) приведения в движение, сделанный водителем, а именно, величину воздействия (например, величину нажатия θa) на педаль 41 акселератора, в требуемый водителем крутящий момент для использования в блоке (C3) приведения в движение транспортного средства, в блоке C1 и преобразует требуемый водителем крутящий момент в команду управления блоку (C3) приведения в движение транспортного средства в блоке C2, эта команда затем передается в блок (C3) приведения в движение транспортного средства. Более конкретно, когда блок (C3) приведения в движение транспортного средства, который должен управляться под управлением амортизацией подрессоренной массы, является двигателем 20, контроллер двигателя преобразует запрос (C0) от водителя на приведение в движение в требуемый выходной крутящий момент двигателя 20 в блоке C1 и преобразует требуемый выходной крутящий момент в команду управления двигателю 20 в блоке C2, эта команда передается двигателю 20. Команда управления двигателю 20 является, например, целевой степенью открытия дроссельной заслонки, если двигатель 20 является бензиновым двигателем, или целевым объемом впрыска топлива, если двигатель 20 является дизельным двигателем, или целевой величиной тока, если блок приведения в движение транспортного средства является электродвигателем. Когда блок (C3) приведения в движение транспортного средства, который должен управляться под управлением амортизацией подрессоренной массы, является трансмиссией 30, контроллер переключения передач преобразует запрос (C0) от водителя на приведение в движение в требуемый выходной крутящий момент трансмиссии 30 в блоке C1 и преобразует требуемый выходной крутящий момент в команду управления трансмиссии 30 в блоке C2, эта команда затем передается трансмиссии 30. Команда управления трансмиссии 30 является положением передачи или передаточным числом, соответствующим требуемому выходному крутящему моменту.
Контроллер 3 амортизации подрессоренной массы включает в себя блок 3a преобразования крутящего момента для преобразования требуемого водителем крутящего момента из блока (C1) вычисления требуемого водителем крутящего момента в требуемый водителем крутящий момент Tw0 на колесах, который должен прикладываться к ведущим колесам W-RR, WRL, блок 3b управления с прямой связью, блок 3c управления с обратной связью и блок 3b преобразования крутящего момента для преобразования величины корректировки требуемого водителем крутящего момента Tw0 на колесах в единицу крутящего момента приведения в движение блока (C3) приведения в движение транспортного средства.
Блок 3b управления с прямой связью сконфигурирован как так называемый оптимальный регулятор. В блоке 3b управления с прямой связью требуемый водителем крутящий момент Tw0 на колесах, полученный в результате преобразования посредством блока 3a преобразования крутящего момента, вводится в блок (C4) динамической модели колебаний подрессоренной массы кузова транспортного средства. В блоке (C4) динамической модели вычисляются реакции переменных состояния кузова транспортного средства на входной требуемый водителем крутящий момент Tw0 на колесах, и величина корректировки требуемого водителем крутящего момента Tw0 на колесах, которая будет сводить переменные состояния к минимуму, вычисляется в блоке C5.
Блок 3c управления с обратной связью также сконфигурирован как так называемый оптимальный регулятор. В блоке 3c управления с обратной связью расчетное значение Tw крутящего момента на колесах, прикладываемого к ведущим колесам WRR, WRL, вычисляется устройством (C6) оценки крутящего момента на колесах способом, который будет описан далее, и коэффициент FB усиления (коэффициент усиления для балансировки долей требуемого водителем крутящего момента Tw0 на колесах и расчетного значения Tw крутящего момента на колесах в блоке (C4) динамической модели) накладывается на расчетное значение Tw0 крутящего момента на колесах. Расчетное значение Tw крутящего момента на колесах, на которое накладывается коэффициент FB усиления, добавляется в качестве входного возмущения к требуемому водителем крутящему моменту Tw0 на колесах, и результат сложения передается в блок (C4) динамической модели. Таким образом, также вычисляется величина корректировки требуемого водителем крутящего момента Tw0 относительно возмущения.
Величина корректировки требуемого водителем крутящего момента Tw0 на колесах, полученная в блоке C5, преобразуется в единицу крутящего момента приведения в движение блока (C3) приведения в движение транспортного средства в блоке 3d преобразования крутящего момента и затем передается сумматору (C1a) контроллера 2 приведения в движение. В контроллере 2 приведения в движение требуемый водителем крутящий момент корректируется на основе величины корректировки так, что колебания подрессоренной массы не возникают, и скорректированный крутящий момент преобразуется в команду управления блоку (C3) приведения в движение транспортного средства в блоке C2, эта команда передается блоку (C3) приведения в движение транспортного средства.
При управлении амортизацией подрессоренной массы, реализуемом системой управления амортизацией подрессоренной массой, предоставляется гипотетическая динамическая модель колебаний подрессоренной массы (вертикальных колебаний и продольных колебаний) кузова транспортного средства, и уравнения состояния для переменных состояния в вертикальном направлении и продольных направлениях формулируются с помощью требуемого водителем крутящего момента Tw0 на колесах и расчетного значения Tw крутящего момента на колесах (возмущения) в качестве входных данных для модели. При управлении амортизацией подрессоренной массы входные данные (значение крутящего момента), которые сводят переменные состояния в вертикальном направлении и продольном направлении к 0, определяются из уравнений состояния с помощью теории оптимального регулятора, и команда управления блоку (C3) приведения в движение транспортного средства в связи с требуемым водителем крутящим моментом корректируется на основе значения крутящего момента.
Пример динамической модели (модели колебаний подрессоренной массы кузова транспортного средства) иллюстрирован на фиг. 4, на котором кузов транспортного средства рассматривается как жесткий кузов S с массой M и моментом инерции I, и жесткий кузов S поддерживается подвеской передних колес, имеющей модуль упругости kf и коэффициент cf амортизации, и подвеской задних колес, имеющей модуль упругости kr и коэффициент cr амортизации. В этом случае уравнение движения в вертикальном направлении в центре тяжести Cg транспортного средства и уравнение движения в продольном направлении в центре тяжести Cg могут быть выражены следующими уравнениями (1a), (1b).
 (1a)
(1a)
 (1b)
(1b)
В вышеуказанных уравнениях (1a), (1b) Lf, Lr обозначают расстояние от центра тяжести Cg транспортного средства до оси передних колес и расстояние от центра тяжести Cg до оси задних колес, соответственно, а r обозначает радиус колес. Также, h обозначает расстояние от поверхности дороги до центра тяжести Cg транспортного средства. В вышеприведенном уравнении (1a) первое выражение и второе выражение представляют компонент усилия, прикладываемого от оси передних колес, а третье выражение и четвертое выражение представляют компонент усилия, прикладываемого от оси задних колес. В вышеприведенном уравнении (1b) первое выражение представляет моментальный компонент усилия от оси передних колес, а второе выражение представляет моментальный компонент усилия от оси задних колес. Также третье выражение из уравнения (1b) представляет моментальный компонент усилия, предоставляемого посредством крутящего момента T (=Tw0+Tw), действующего на ведущие колеса WRR, WRL вокруг центра тяжести Cg транспортного средства.
Вышеуказанные уравнения (1a), (1b) могут быть перезаписаны в форме уравнения состояния (линейной системы), которая выражена следующим уравнением (2a), где смещения z, θ кузова транспортного средства и их степени изменения dz/dt, dθ/dt представлены вектором X(t) переменной состояния.
|
В вышеприведенном уравнении (2a) X(t), A, B выражаются следующим образом.
 (2b),
(2b),  (2c),
(2c),  (2d)
(2d)
Элементы с a1 по a4 и с b1 по b4 вышеуказанной матрицы A даны ниже посредством группировки коэффициентов z, θ, dz/dt и dθ/dt вместе в вышеуказанных уравнениях (1a), 1(b).
|
Также, u(t) в вышеприведенном уравнении (2a) является входом системы, выраженной уравнением (2a), и задается следующим образом.
|
Соответственно, элемент p1 матрицы B выражается следующим образом, согласно вышеуказанному уравнению (1b).
|
Если u(t) заменяется следующим уравнением (2f) в вышеприведенном уравнении (2a) (уравнении состояния), уравнение (2a) перезаписывается в следующее уравнение (2g).
|
Соответственно, если первоначальные значения X0 из X(t) установлены так, что X0(t)=(0, 0, 0, 0) (предполагая, что нет колебаний перед тем, как прикладывается крутящий момент), и коэффициент K усиления, который сводит X(t), т.е., величины смещений в вертикальном направлении и продольном направлении и скорости их изменения, к 0, определяется, когда решается дифференциальное уравнение (2g) вектора X(t) переменной состояния, значение u(t) крутящего момента для амортизации колебаний подрессоренной массы определяется.
Коэффициент K усиления определяется с помощью теории оптимального регулятора. Согласно теории, когда значение оценочной функции квадратичной формы (диапазон целых чисел от 0 до ∞):
|
является минимальным, X(t) стабильно сводится к 0 в уравнении состояния (вышеуказанном уравнении (2a)). Матрица K, которая минимизирует оценочную функцию J, задана уравнением:
|
Здесь, P является решением следующего уравнения Риккати.
|
Уравнение Риккати может быть решено определенным способом, известным в области линейных систем, и коэффициент K определяется на основе P.
Q и R в оценочной функции J и уравнении (4c) Риккати являются полуположительно определенной симметричной матрицей и положительно определенной симметричной матрицей, соответственно, которые устанавливаются произвольно, и они являются весовыми матрицами оценочной функции J, которые определяются разработчиком системы. В случае динамической модели этого примера Q и R устанавливаются следующим образом.
|

Если Q и R установлены, как указано выше, и нормы (размеры) отдельных (например, dz/dt, dθ/dt) компонентов вектора X(t) переменной состояния установлены большими, чем нормы других компонентов (например, z, θ) в вышеуказанном уравнении (4a), компоненты, нормы которых установлены большими, более стабильно сходятся к 0. Если значения компонентов Q увеличиваются, акцент смещается на переходные характеристики, а именно, значения вектора X(t) переменной состояния быстро сводится к устойчивым значениям. Если значение R увеличивается, потребляемая энергия уменьшается.
При фактическом управлении амортизацией подрессоренной массы системы амортизации подрессоренной массы первого варианта осуществления вектор X(t) переменной состояния вычисляется в блоке (C4) динамической модели посредством решения дифференциального уравнения (2a) с помощью входного значения крутящего момента, как показано на фиг. 3. В системе, которая представлена вышеуказанными уравнениями (1a), (1b), значение U(t), которое получено в блоке C5 посредством умножения вектора X(t) переменной состояния в качестве выходного значения блока (C4) модели движения на коэффициент K усиления, определенный так, что вектор X(t) переменной состояния сводится к 0 или минимальному значению, как описано выше, преобразуется в единицу крутящего момента приведения в движение системы (C3) приведения в движение транспортного средства и вычитается из требуемого водителем крутящего момента в сумматоре (C1a). Эта система является резонансной системой, и значение вектора X(t) переменной состояния, когда система принимает предоставленные входные данные, по существу, состоит только из компонента собственной частоты системы. Соответственно, вычитая (преобразованное) U(t) из команды управления согласно требуемому водителем крутящему моменту, требуемый водителем крутящий момент корректируется с точки зрения компонента собственной частоты системы, а именно, компонента, который вызывает возникновение колебаний подрессоренной массы в кузове транспортного средства, и колебания подрессоренной массы амортизируются или подавляются. Если компонент собственной частоты системы устраняется из крутящего момента, требуемого водителем, компонент собственной частоты системы в команде требуемого водителем крутящего момента, принимаемой блоком (C3) приведения в движение транспортного средства, равен только -U(t), и колебания из-за Tw (возмущения) стабилизируются. В то время как U(t) замкнуто на входную сторону блока (C4) модели движения на фиг. 3, этот цикл может быть опущен или устранен для уменьшения объема вычислений, предусмотренных для того, чтобы обеспечивалась требуемая характеристика амортизации подрессоренной массы. Также, в то время как только управление с обратной связью затрагивает коэффициент усиления FF, FB весовой балансировки на фиг. 3, управление с прямой связью может также затрагивать коэффициент FF, FB весовой балансировки.
В качестве динамической модели для движения транспортного средства в вертикальном направлении и продольном направлении может быть применена модель (модель колебаний подрессоренной и неподрессоренной массы кузова транспортного средства), которая показана на фиг. 5 в качестве примера, которая принимает во внимание свойства упругости шин передних и задних колес, которые добавляются в вышеуказанную модель на фиг. 4. Если шины передних колес и задних колес имеют модули упругости ktf, ktr, соответственно, уравнения движения в вертикальном направлении относительно центра тяжести кузова транспортного средства и уравнения движения в продольном направлении около центра тяжести могут быть представлены следующими уравнениями (6a)-(6d).
 (6a)
(6a)
 (6b)
(6b)
 (6c)
(6c)
 (6d)
(6d)
В каждом из вышеуказанных уравнений (6a)-(6d) xf и xr являются смещениями неподрессоренных масс передних колес и задних колес, соответственно, а mf и mr являются неподрессоренными массами передних колес и задних колес, соответственно. Уравнения (6a)-(6d) предоставляют уравнение состояния аналогично вышеуказанному уравнению состояния (2a) тем же образом, что и в случае на фиг. 4. В уравнении состояния, представляющем модель на фиг. 5, z, θ, xf, xr и их дифференциальные значения по времени представлены вектором переменной состояния, а матрица A имеет восемь строк и восемь столбцов, в то время как матрица B имеет восемь строк и один столбец. Матрица K коэффициентов усиления, которая сводит переменные состояния этого вектора к 0, может быть определена согласно теории оптимального регулятора. В этом случае фактическое управление амортизацией подрессоренной массы также аналогично управлению из случая на фиг. 4.
В блоке 3c управления с обратной связью контроллера 3 амортизации подрессоренной массы на фиг. 3 крутящий момент на колесах в качестве входных данных, представляющих возмущение, может фактически обнаруживаться датчиком крутящего момента, предусмотренным на каждом из колес WFR-, WFL, WRR, WRL транспортного средства, например. В примере на фиг. 3, однако, используется расчетное значение Tw крутящего момента на колесах, которое рассчитывается устройством (C6) оценки крутящего момента на колесах из других значений, которые могут быть обнаружены в движущемся транспортном средстве 10.
Расчетное значение Tw крутящего момента на колесах может быть рассчитано или вычислено согласно следующему уравнению (7a) с помощью дифференциального значения по времени скорости ω вращения колеса или значения r×ω скорости колеса, полученных из устройств 71RR, 71RL получения скорости колеса (датчиков скорости колеса) ведущих колес WRR, WRL, например. В уравнении (7a) ниже, M является массой транспортного средства, а r - радиусом колеса.
|
Предположим, что сумма движущих сил, вызываемых ведущими колесами WRR, WRL в местах, где колеса находятся в соприкосновении с дорогой, равна общей движущей силе M×G (G - это ускорение) транспортного средства 10, расчетное значение Tw крутящего момента на колесах задается следующим уравнением (7b).
|
Ускорение G транспортного средства 10 задается следующим уравнением (7c) с помощью дифференциального значения величины r×ω скорости колеса.
|
Соответственно, расчетное значение Tw крутящего момента на колесах рассчитывается согласно вышеуказанному уравнению (7a).
В транспортном средстве 10 компоненты колебания, которые должны амортизироваться, могут включать в себя компонент колебания, который возникает в источнике мощности типа двигателя 20, компонент колебания, который возникает в устройстве передачи мощности типа трансмиссии 30 или дифференциальной передачи 52, расположенной на пути передачи мощности от источника мощности, и т.д., в дополнение к компоненту колебания, полученному от дороги через колеса WFR, WFL, WRR, WRL. При амортизации колебаний транспортного средства 10, возникающих из вышеуказанных различных компонентов колебания, предпочтительно определять величину регулирования крутящего момента, требуемую, чтобы амортизировать колебания относительно каждого из компонентов колебания, которые должны быть амортизированы, и объединять величину регулирования крутящего момента для каждого компонента колебания с основным требуемым крутящим моментом приведения в движение (основной требуемой движущей силой). Основной требуемый крутящий момент приведения в движение (основная требуемая движущая сила) является крутящим моментом приведения в движение (движущей силой), на основании которого требуется выходной сигнал блока приведения в движение транспортного средства (более конкретно, источника мощности, такого как двигатель 20), и устанавливается на основе величины воздействия на педаль 41 акселератора водителем или целевого крутящего момента приведения в движение (целевой движущей силы), установленного при автоматическом управлении движением, таком как ACC (адаптивный круиз-контроль). В то время как крутящий момент приведения в движение (движущая сила) для движения транспортного средства может быть сформирован посредством возбуждения источника мощности с основным требуемым крутящим моментом приведения в движение (основной требуемой движущей силой), вышеуказанные различные компоненты колебания едва ли амортизируются с помощью одного основного требуемого крутящего момента приведения в движение (основной требуемой движущей силы).
Когда величины регулирования крутящего момента для соответствующих компонентов колебания объединяются в основной требуемый крутящий момент приведения в движение (основную требуемую движущую силу), все величины регулирования крутящего момента могут быть сложены вместе и объединены в основной требуемый крутящий момент (основную требуемую движущую силу), но желательно объединены в порядке, как описано ниже. Более конкретно, желательно корректировать основной требуемый крутящий момент приведения в движение (основную движущую силу), принимая во внимание частоты компонентов колебаний, которые должны быть амортизированы, так что величина регулирования крутящего момента для компонента колебания, имеющего более высокую частоту, накладывается на (или объединяется в) основной требуемый крутящий момент приведения в движение в более поздний момент времени. Например, частота компонента колебания, которое возникает в вышеупомянутом устройстве передачи мощности, как правило, выше, чем частота компонента колебания, полученного от дороги через колеса WFR, WFL, WRR, WRL, и частота компонента колебания, которое происходит в источнике мощности, таком как двигатель 20, как правило, выше, чем частота компонента колебания, которое происходит в вышеупомянутом устройстве передачи мощности. Поэтому, желательно, с точки зрения амортизации колебания, объединять величину регулирования крутящего момента для компонента колебания, полученного от дороги через колеса WFR, WFL, WRR, WRL, величину регулирования крутящего момента для компонента колебания, возникающего в устройстве передачи мощности, и величину регулирования крутящего момента для компонента колебания, возникающего в источнике мощности, таком как двигатель 20, в основной требуемый крутящий момент приведения в движение (основную движущую силу) в этом порядке.
При амортизации компонента колебания, полученного от дороги через колеса WFR, WFL, WRR, WRL, величина регулирования крутящего момента может быть установлена на основе только компонента колебания, но предпочтительно модифицируется или устанавливается, принимая во внимание другие условия. Например, скорость транспортного средства может быть получена в качестве условия работы транспортного средства 10, и величина регулирования крутящего момента может быть установлена меньшей, когда скорость транспортного средства увеличивается. Также, температура двигателя, такая как температура воды, может быть получена в качестве условия состояния источника мощности (двигателя 10), и величина регулирования крутящего момента может быть установлена меньшей, когда температура двигателя увеличивается. Также, величина регулирования крутящего момента может изменяться в соответствии с положением передачи трансмиссии 30 или может уменьшаться, когда соотношение между выходной мощностью (крутящим моментом приведения в движение, движущей силой) двигателя 10 и скоростью вращения (скоростью двигателя) удовлетворяет определенному условию (например, при условии, когда должно произойти значительное колебание оборотов двигателя). Также, когда крутящий момент приведения в движение (движущая сила), который должен передаваться от источника мощности к ведущим колесам WRR, WRL, становится, по существу, равным 0 или близким к 0, желательно уменьшать или ограничивать величину регулирования крутящего момента для того, чтобы подавлять или предотвращать шум устройства передачи мощности.
Управление амортизацией подрессоренной массы необязательно должно выполняться в соответствии с возникновением колебаний подрессоренной массы всякий раз, когда колебания подрессоренной массы возникают в кузове транспортного средства, как описано выше. Другими словами, существуют моменты времени или условия, при которых выполнение управления амортизацией подрессоренной массы должно быть разрешено (которые будут называться "условиями для разрешения управления амортизацией подрессоренной массы"), и существуют моменты времени или условия, при которых выполнение управления амортизацией подрессоренной массы должно быть запрещено (которые будут называться "условиями для запрещения управления амортизацией подрессоренной массы"). Таким образом, желательно определять, необходимо ли выполнять управление амортизацией подрессоренной массы, в зависимости от того, удовлетворяются ли вышеописанные условия.
В первом варианте осуществления система управления амортизацией подрессоренной массы (электронный блок 1 управления) снабжен блоком определения выполнения управления амортизацией подрессоренной массы, который сконфигурирован так, чтобы позволять управлению амортизацией подрессоренной массы выполняться при соответствующих условиях. Блок определения выполнения управления амортизацией подрессоренной массы выполняет определение, какое одно(ни) из условий для разрешения управления амортизацией подрессоренной массы или условий для запрещения управления амортизацией подрессоренной массы удовлетворяет(ют)ся, согласно, по меньшей мере, одному из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя, которые будут описаны позже, более конкретно, согласно, по меньшей мере, одному из различных условий, на которые подразделяются условия работы транспортного средства 10, как описано ниже.
Например, если блок определения выполнения управления амортизацией подрессоренной массы определяет, что любое из условий для запрещения управления амортизацией подрессоренной массы удовлетворяется, в то время как управление амортизацией подрессоренной массы не выполнялось, управление амортизацией подрессоренной массы не начинается. С другой стороны, если блок определения выполнения управления амортизацией подрессоренной массы определяет, что условия для разрешения управления амортизацией подрессоренной массы удовлетворяются, в то время как управление амортизацией подрессоренной массы не выполнялось, вышеупомянутый контроллер 2 приведения в движение выполняет управление выходным сигналом блока приведения в движение транспортного средства (двигателя 20 или трансмиссии 30) на основе результата величины управляющего воздействия по амортизации подрессоренной массы, установленной контроллером амортизации подрессоренной массы (величины корректировки требуемого водителем крутящего момента Tw0 на колесах, определенного контроллером 3 амортизации подрессоренной массы), чтобы начинать управление амортизацией подрессоренной массы. Это определение также осуществляется во время выполнения управления амортизацией подрессоренной массы; следовательно, если определяется снова, что условия для разрешения управления амортизацией подрессоренной массы удовлетворяются, контроллер приведения в движение продолжает управление амортизацией подрессоренной массы согласно величине управляющего воздействия по амортизации подрессоренной массы, установленной в это время. Если условие(я) для запрещения управления амортизацией подрессоренной массы удовлетворяет(ют)ся во время выполнения управления амортизацией подрессоренной массы, контроллер приведения в движение прекращает управление амортизацией подрессоренной массы.
Когда управление амортизацией подрессоренной массы начинается и закачивается, соответствующая модель управления для момента, когда управление амортизацией подрессоренной массы начинается (которая будет называться "моделью начала управления амортизацией подрессоренной массы"), и соответствующая модель управления для момента времени, когда управление амортизацией подрессоренной массы заканчивается (которая будет называться "моделью окончания управления амортизацией подрессоренной массы") устанавливаются, соответственно. А именно, может быть предпочтительным немедленно начинать или заканчивать управление амортизацией подрессоренной массы или может быть предпочтительным постепенно начинать или заканчивать управление амортизацией подрессоренной массы при соответствующей скорости, в зависимости от условий работы транспортного средства 10, условий состояния транспортного средства 10 или требований водителя, как будет описано ниже. Например, резкое изменение в крутящем моменте, прикладываемом к ведущим колесам WRR, WRL, как правило, считается нежелательным, и желательно постепенно увеличивать или уменьшать крутящий момент на колесах (движущую силу на колесах) с соответствующей скоростью. Это также применимо к управлению амортизацией подрессоренной массы. В первом варианте осуществления, поэтому, модель начала управления амортизацией подрессоренной массы и модель окончания управления амортизацией подрессоренной массы устанавливаются аналогичным образом, и управление амортизацией подрессоренной массы начинается или заканчивается при соответствующих условиях, например, в зависимости от условий работы транспортного средства 10.
Модель начала управления амортизацией подрессоренной массы настраивается согласно, по меньшей мере, одному из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя, более конкретно, согласно, по меньшей мере, одному из различных условий, на которые подразделяются условия работы транспортного средства 10, как описано ниже. Блок настройки модели начала управления амортизацией подрессоренной массы в системе управления амортизацией подрессоренной массы (электронном блоке 1 управления) настраивает модель начала управления амортизацией подрессоренной массы. С другой стороны, модель окончания управления амортизацией подрессоренной массы настраивается согласно, по меньшей мере, одному из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя, более конкретно, согласно, по меньшей мере, одному из различных условий, на которые подразделяются условия работы транспортного средства 10, как описано ниже. Блок настройки модели окончания управления амортизацией подрессоренной массы в системе управления амортизацией подрессоренной массы (электронном блоке 1 управления) настраивает модель окончания управления амортизацией подрессоренной массы.
В последующем блок настройки модели начала управления амортизацией подрессоренной массы обычно настраивает модель начала управления амортизацией подрессоренной массы, согласно которой управление амортизацией подрессоренной массы постепенно начинается (а именно, величина управляющего воздействия по амортизации подрессоренной массы делается равной его установленному значению в течение данного периода времени (например, доля секунды), если не указано иное. Эта модель начала управления амортизацией подрессоренной массы будет описана более конкретно: выходной сигнал блока приведения в движение транспортного средства первоначально определяется с величиной управляющего воздействия (0 или величиной управляющего воздействия, близкой к 0), которая меньше, чем величина управляющего воздействия по амортизации подрессоренной массы, установленной в момент начала управления амортизацией подрессоренной массы, и затем выходной сигнал блока приведения в движение транспортного средства постепенно изменяется так, что величина управляющего воздействия по амортизации подрессоренной массы постепенно увеличивается от первоначального значения до установленного значения в течение данного периода времени (другими словами, величина управляющего воздействия по амортизации подрессоренной массы постепенно увеличивается до установленного значения). Между тем, модель начала управления амортизацией подрессоренной массы для немедленного начала управления амортизацией подрессоренной массы (а именно, для немедленного достижения установленного значения величины управляющего воздействия по амортизации подрессоренной массы) является такой, что выходной сигнал блока приведения в движение транспортного средства управляется так, чтобы достигать установленного значения величины управляющего воздействия по амортизации подрессоренной массы немедленно после того, как определяется начало управления амортизацией подрессоренной массы.
В последующем, блок настройки модели окончания управления амортизацией подрессоренной массы обычно устанавливает модель окончания управления амортизацией подрессоренной массы, согласно которой управление амортизацией подрессоренной массы постепенно заканчивается в течение данного периода времени (например, доли секунды), если не указано иное. Более конкретно, эта модель окончания управления амортизацией подрессоренной массы является такой, что выходной сигнал блока приведения в движение транспортного средства, который достигает установленного значения величины управляющего воздействия по амортизации подрессоренной массы, первоначально определяется тем же образом, что и во время управления амортизацией, и затем выходной сигнал блока приведения в движение транспортного средства, ассоциированный с управлением амортизацией подрессоренной массы, постепенно уменьшается от этого значения до 0 (другими словами, величина управляющего воздействия по амортизации подрессоренной массы постепенно уменьшается до 0). Между тем, модель окончания управления амортизацией подрессоренной массы для немедленного окончания управления амортизацией подрессоренной массы является такой, что выходной сигнал блока приведения в движение транспортного средства, ассоциированный с управлением амортизацией подрессоренной массы, уменьшается до 0 немедленно после того, когда определяется завершение управления амортизацией подрессоренной массы.
Сначала будут объяснены условия работы транспортного средства 10. Условия работы транспортного средства 10, упомянутые в данном документе, включают в себя, например, скорость транспортного средства, положение передачи или диапазон положений переключателя передач трансмиссии 30, операцию переключения передачи трансмиссии 30 (которая ограничена автоматической трансмиссией, имеющей два или более положений передач, и бесступенчатой трансмиссией), условие работы преобразователя крутящего момента трансмиссии 30, условие работы дроссельной заслонки, когда педаль акселератора управляется водителем, или транспортное средство работает в автоматическом режиме управления, таком как ACC (адаптивный круиз-контроль), условия вращения ведущих колес WRR, WRL, условие работы ABS (антиблокировочной тормозной системы), условие работы системы контроля поведения транспортного средства, такой как VSC (система контроля стабильности транспортного средства) или TRC (противопробуксовочная система) и т.д. Соответственно, блок определения выполнения управления амортизацией подрессоренной массы может определять, какое одно из условий для разрешения управления амортизацией подрессоренной массы и условий для запрещения управления амортизацией подрессоренной массы удовлетворяется, на основе, по меньшей мере, одного из этих различных рабочих условий транспортного средства 10. Также, блок настройки модели начала управления амортизацией подрессоренной массы и блок настройки модели окончания управления амортизацией подрессоренной масс могут настраивать модель начала управления амортизацией подрессоренной массы или модель окончания управления амортизацией подрессоренной массы на основе, по меньшей мере, одного из этих различных условий работы транспортного средства 10.
Как правило, в транспортном средстве 10 скорость транспортного средства оценивается на основе скоростей колес WFR, WFL, WRR, WRL, полученных устройствами 71FR, 71FL, 71RR, 71RL получения скорости колеса (датчиками скорости колеса), соответственно. Точность, с которой скорости колес обнаруживаются, может уменьшаться в зависимости от условий между колесами WFR, WFL, WRR, WRL и поверхностью дороги, которые могут обуславливать вероятность того, что значение рассчитанной скорости транспортного средства отклоняется от фактической скорости транспортного средства. Эта вероятность увеличивается в диапазоне низких скоростей транспортного средства. Поэтому, система управления амортизацией подрессоренной массы этого варианта осуществления устанавливает ситуацию, когда скорость транспортного средства выше, чем указанная скорость транспортного средства (например, 8-10 км/ч) в качестве порогового значения, как условие для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда скорость транспортного средства ниже, чем указанная скорость транспортного средства в качестве условия для запрещения управления амортизацией подрессоренной массы. Например, учитывая изменения в точности при оценке скорости транспортного средства в диапазоне низких скоростей транспортного средства, блок определения выполнения управления амортизацией подрессоренной массы может быть сконфигурирован, чтобы определять, что условие для разрешения управления амортизацией подрессоренной массы удовлетворяется, если скорость транспортного средства равна или выше, чем 10 км/ч, и разрешать выполнение управления амортизацией подрессоренной массы, и может также быть сконфигурирован, чтобы определять, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, если скорость транспортного средства равна или ниже, чем 8 км/ч, и запрещать выполнение управления амортизацией подрессоренной массы. Если скорость транспортного средства может быть получена с высокой точностью в диапазоне низких скоростей транспортного средства, необходимо определять, разрешено или запрещено управление амортизацией подрессоренной массы, в зависимости от скорости транспортного средства.
Транспортное средство 10, которое показано на фиг. 1, оборудовано автоматической трансмиссией, имеющей два или более положения передач, в качестве трансмиссии 30. В этом случае трансмиссия 30 снабжена так называемым датчиком 31 положения переключателя передач, способным обнаруживать текущее положение передачи, который позволяет электронному блоку 1 управления знать о текущем положении передачи трансмиссии 30 при необходимости. Когда трансмиссия 30 является механической трансмиссией, с другой стороны, такой датчик положения переключателя передач не устанавливается, и текущее положение передачи, как правило, оценивается (определяется) посредством сравнения значения выходной мощности двигателя 20 со значением выходной мощности трансмиссии 30. Следовательно, когда трансмиссия 30 находится в положении передачи низкой скорости, положение передачи может быть ошибочно определено из-за того, что колебания в выходной мощности двигателя 20, например, больше, чем обнаруженные, когда трансмиссия 30 находится в положении передачи высокой скорости. Соответственно, система управления амортизацией подрессоренной массы транспортного средства 10, на котором установлена механическая трансмиссия, устанавливает ситуацию, когда трансмиссия 30 находится в положении передачи высокой скорости, равной или выше, чем положение передачи второй скорости, где положение передачи менее вероятно должно быть ошибочно определено, в качестве условия для разрешения управления амортизацией подрессоренной массы и устанавливает ситуацию, когда трансмиссия 30 находится в положении передачи первой скорости, где существует вероятность ошибочного определения положения передачи, в качестве условия для запрещения управления амортизацией подрессоренной массы. Если транспортное средство оснащено средством корректного определения текущего положения передачи механической трансмиссии, управление амортизацией подрессоренной массы может выполняться, даже когда трансмиссия находится в положение передачи первой скорости.
Когда транспортное средство 10 не движется вперед, или когда мощность не передается к ведущим колесам WRR, WRL, вышеописанная модель управления точно не соответствует фактическим перемещениям кузова транспортного средства. Следовательно, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда трансмиссия 30 находится в положении для движения транспортного средства 10 вперед (т.е., выбрано положение передачи переднего хода, или рычаг переключения передач помещается в диапазон D), или когда трансмиссия 30 находится в середине переключения, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда трансмиссия 30 находится в положении, которое не вынуждает транспортное средство 10 двигаться вперед (т.е., выбрано положение передачи заднего хода, или рычаг переключения передач помещен в диапазон P, диапазон R или диапазон N), или когда трансмиссия 30 находится в середине переключения, в качестве условия для запрещения управления амортизацией подрессоренной массы. В механической трансмиссии мощность не может передаваться ведущим колесам WRR, WRL, когда сцепление выключается. Соответственно, система управления амортизацией подрессоренной массы транспортного средства 10, на котором установлена механическая трансмиссия, устанавливает ситуацию, когда сцепление выключено, в качестве условия для запрещения управления амортизацией подрессоренной массы. В этой связи, когда трансмиссия 30 приводится в положение, которое не вынуждает транспортное средство 10 двигаться вперед, или трансмиссия 30 приводится в действие для переключения во время выполнения управления амортизацией подрессоренной массы, модель управления перестает соответствовать фактическим движениям кузова транспортного средства, и, следовательно, управление амортизацией подрессоренной массы должно быть немедленно остановлено. Также, когда сцепление механической трансмиссии выключается во время выполнения управления амортизацией подрессоренной массы, мощность не может передаваться ведущим колесам WRR, WRL, и нет точки продолжения управления амортизацией подрессоренной массы. Следовательно, когда трансмиссия 30 приводится в положение, которое не вынуждает транспортное средство 10 двигаться вперед, или сцепление механической трансмиссии выключается во время выполнения управления амортизацией подрессоренной массы, а именно, когда определяется, что вышеупомянутое условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, желательно устанавливать модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы.
Выходной сигнал трансмиссии 30 изменяется в зависимости от условий работы преобразователя крутящего момента, даже если входная мощность имеет ту же величину. Например, соотношение между входной и выходной мощностью трансмиссии 30 может быть легко понято, когда блокировочная муфта преобразователя крутящего момента находится в полностью сцепленном состоянии (т.е., во время блокировки преобразователя крутящего момента). Однако, когда блокировочная муфта находится в полусцепленном состоянии (ее сцепляющие элементы находятся в соприкосновении друг с другом, в то же время проскальзывая относительно друг друга) или в освобожденном состоянии (нет соприкосновения между сцепляющими элементами), большие изменения возникают в выходной мощности трансмиссии 30, и соотношение между входной и выходной мощностью трансмиссии 30 могут не быть интерпретированы. Если это соотношение не может быть правильно интерпретировано, крутящий момент на колесах (движущая сила на колесах), действующая на ведущие колеса WRR, WRL, может не управляться до соответствующей или правильной величины при управлении амортизацией подрессоренной массы. Следовательно, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда блокировочная муфта находится в полностью сцепленном состоянии, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда блокировочная муфта находится в полусцепленном состоянии или освобожденном состоянии, в качестве условия для запрещения управления амортизацией подрессоренной массы.
Когда блокировочная муфта приводится в полусцепленное состояние или освобожденное состояние во время выполнения управления амортизацией подрессоренной массы, и, таким образом, определяется, что вышеупомянутое условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, желательно устанавливать вышеописанную модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что, когда блокировочная муфта приводится в полусцепленное или освобожденное состояние, крутящий момент на колесах (движущая сила на колесах), действующий на ведущие колеса WRR, WRL, может не создаваться с правильной величиной при управлении амортизацией подрессоренной массы, как описано выше.
Когда водитель управляет педалью акселератора, или педаль акселератора находится под управлением в автоматическом режиме движения, контроллер приведения в движение (контроллер двигателя) управляет электродвигателем 44 так, чтобы увеличивать степень открытия дроссельной заслонки 43. Другими словами, контроллер приведения в движение (контроллер двигателя) не управляет электродвигателем 44 с тем, чтобы увеличивать степень открытия дроссельной заслонки 43, если не обнаружено воздействие на педаль акселератора, или педаль акселератора не находится под управлением в автоматическом режиме движения. Следовательно, когда водитель не управляет педалью акселератора, или педаль акселератора не находится под управлением в автоматическом режиме движения, степень открытия дроссельной заслонки 43 меньше, чем степень открытия ISC (при управлении холостым ходом). Когда степень открытия дроссельной заслонки 43 меньше степени открытия ISC, выходной сигнал (крутящий момент приведения в движение, движущая сила), который уменьшается с уменьшением степени открытия дроссельной заслонки, не может быть создан с соответствующей величиной, даже если управление амортизацией подрессоренной массы выполняется посредством управления выходной мощности двигателя 20. Таким образом, система управления амортизацией подрессоренной массы этого варианта осуществления устанавливает ситуацию, когда дроссельная заслонка 43 управляется до большей степени открытия дроссельной заслонки (т.е., педаль акселератора управляется водителем, или педаль акселератора находится под управлением в автоматическом режиме движения), в качестве условия для разрешения управления амортизацией подрессоренной массы, включающего в себя это условие. Также, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда дроссельная заслонка 43 не управляется до большей или меньшей степени открытия дроссельной заслонки (т.е., педаль акселератора не управляется водителем, или педаль акселератора не находится под управлением в автоматическом режиме движения), в качестве условия для запрещения управления амортизацией подрессоренной массы.
Когда дроссельная заслонка 43 закрывается во время выполнения управления амортизацией подрессоренной массы, и, таким образом, определяется, что вышеупомянутое условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, желательно устанавливать вышеописанную модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что соответствующее управление амортизацией подрессоренной массы не может выполняться, когда управление педалью акселератора водителем прекращается, и дроссельная заслонка 43 закрывается.
Когда ведущие колеса WRR, WRL находятся в состоянии проскальзывания, вышеописанная модель управления точно не соответствует фактическим движениям кузова транспортного средства, и соответствующий крутящий момент на колесах (движущая сила на колесах) для амортизации колебаний подрессоренной массы не может быть создан на ведущих колесах WRR, WRL. Следовательно, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда ведущие колеса WRR, WRL не находятся в состоянии проскальзывания, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда ведущие колеса WRR, WRL находятся в состоянии проскальзывания, в качестве условия для запрещения управления амортизацией подрессоренной массы. Может быть определено, находятся ли ведущие колеса WRR, WRL в состоянии проскальзывания, на основе скоростей соответствующих колес WFR, WFL, WRR, WRL, полученных от устройств 71FR, 71FL, 71RR, 71RL получения скорости колеса (датчиков скорости колеса). Например, определяется, что ведущие колеса WRR, WRL находятся в состоянии проскальзывания, когда разница между ведомыми колесами WFR, WFL и ведущими колесами WRR, WRL равна или больше, чем предварительно определенное значение, и определяется, что ведущие колеса WRR, WRL не находятся в состоянии проскальзывания, когда разница в скорости колеса меньше, чем предварительно определенное значение. В этом примере, может быть окончательно определено, что условие для разрешения управления амортизацией подрессоренной массы удовлетворяется, если определение того, что ведущие колеса не находятся в состоянии проскальзывания, продолжает выполняться в течение данного периода времени (например, несколько секунд) или дольше, и может быть окончательно определено, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, если определение того, что ведущие колеса находятся в состоянии проскальзывания, продолжает выполняться в течение заданного периода времени (например, доля секунды) или дольше.
Если ведущие колеса WRL, WRR приводятся в состояние проскальзывания во время выполнения управления амортизацией подрессоренной массы, и, таким образом, определяется, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, желательно устанавливать вышеописанную модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что соответствующее управление амортизацией подрессоренной массы не может выполняться, если ведущие колеса WRR, WRL находятся в состоянии проскальзывания.
Когда функционируют ABS, VSC-система, TRC-система или т.п., управление, выполняемое любой из этих систем, может вмешиваться в управление амортизацией подрессоренной массы, и одно из этих управлений может иметь нежелательное воздействие на другое управление. Следовательно, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда система управления, такая как ABS, VSC-система или TRC-система, не функционирует, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда система управления функционирует, в качестве условия для запрещения управления амортизацией подрессоренной массы. Когда система управления активируется во время выполнения управления амортизацией подрессоренной массы, и, таким образом, определяется, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, желательно устанавливать вышеописанную модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что взаимное влияние между управлениями, как описано выше, должно быть предотвращено на самой ранней возможной стадии.
Далее, будут описаны условия состояния транспортного средства 10. Условия состояния транспортного средства 10, упомянутые в данном документе, включают в себя, например, температуру электродвигателя 44 для управления дроссельной заслонкой, состояния устройств или компонентов, относящихся к управлению амортизацией подрессоренной массы, состояние электронного блока управления (ЭБУ 1) и т.д. Блок определения выполнения управления амортизацией подрессоренной массы может определять, удовлетворяется ли какое-либо из условий для разрешения управления амортизацией подрессоренной массы и условий для запрещения управления амортизацией подрессоренной массы, на основе, по меньшей мере, одного из вышеуказанных условий состояния транспортного средства 10. Также, блок настройки модели начала управления амортизацией подрессоренной массы и блок настройки модели окончания управления амортизацией подрессоренной масс могут настраивать модель начала управления амортизацией подрессоренной массы или модель окончания управления амортизацией подрессоренной массы на основе, по меньшей мере, одного из вышеуказанных условий состояния транспортного средства 10.
Актуатор (электродвигатель 44) для управления дроссельной заслонкой становится горячим или нагревается, когда дроссельная заслонка 43 управляется или приводится в действие актуатором. Таким образом, температура электродвигателя 44 может увеличиваться, если дроссельная заслонка 43 часто управляется электродвигателем 44 при управлении амортизацией подрессоренной массы. Если электродвигатель 44 приводится в действие с высокой частотой, током управления большой амплитуды с тем, чтобы управлять дроссельной заслонкой 43, например, чтобы сильно изменять степень открытия дроссельной заслонки 43, тепло может накапливаться в части держателя щеток электродвигателя 44, и реакция электродвигателя 44 может ухудшаться, приводя в результате к вероятности того, что благоприятное управление амортизацией подрессоренной массы не может выполняться. Следовательно, управление амортизацией подрессоренной массы может быть запрещено в зависимости от температуры электродвигателя 44. Таким образом, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда температура электродвигателя 44 не превышает указанную температуру, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда температура становится равной или выше, чем указанная температура, в качестве условия для запрещения управления амортизацией подрессоренной массы. В этом случае, условия предпочтительно устанавливаются, только когда проводится вышеописанное управление с обратной связью.
Чтобы определять, удовлетворяется ли условие для разрешения управления амортизацией подрессоренной массы или управление для запрещения управления амортизацией подрессоренной массы, может быть предусмотрен датчик температуры для непосредственного обнаружения температуры электродвигателя 44, и определение может выполняться на основе результата обнаружения. Когда блок приведения в движение транспортного средства является бензиновым двигателем, данные карты соответствия, имеющие целевую степень открытия дроссельной заслонки 43 и частоту тока управления электродвигателя 44 в качестве параметров, подготавливаются заранее, и управление амортизацией подрессоренной массы выполняется, если параметры сохраняются вне диапазона в данных карты соответствия, где условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, в течение данного периода времени (например, несколько секунд), тогда как управление амортизацией подрессоренной массы запрещается, если параметры находятся в диапазоне в данных соответствия, где условие для запрещения управления амортизацией подрессоренной массы удовлетворяется. Соотношение между данными карты соответствия и соответствующими параметрами устанавливается заранее посредством эксперимента или моделирования.
Когда неисправность обнаруживается в устройствах или компонентах, связанных с управлением амортизацией подрессоренной массы, существует высокая вероятность того, что соответствующее управление амортизацией подрессоренной массы не может проводиться. Например, когда обеспечение работоспособности при отказе отдельных элементов выполняется в двигателе 20, двигатель 20 не может предоставлять требуемую мощность или энергию, определенную при управлении амортизацией подрессоренной массы, и соответствующее управление амортизацией подрессоренной массы не может проводиться. Если существует неисправность в устройствах 71FR, 71FL, 71RR, 71RL получения скорости колеса (датчиках скорости колеса), могут возникать ошибки в результатах вычислений, ассоциированных с управлением амортизацией подрессоренной массы. Неисправность в устройствах или компонентах, связанных с управлением амортизацией подрессоренной массы, может также возникать, например, в случае, когда деактивирован обмен данными средством связи для управления тормозом, в случае, когда ошибочно определяется положение передачи или передаточное число трансмиссии 30, или в случае, когда возникает неисправность или ошибка в дублируемой информации для использования в управлении амортизацией подрессоренной массы. Дублируемая информация подготавливается так, чтобы определять целостность команд управления (так называемая зеркальная проверка), когда проводится управление амортизацией подрессоренной массы, и управляющие сигналы, ассоциированные с командами управления, создаются как объекты, которые должны сравниваться с управляющими сигналами. Таким образом, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда неисправности, которые иллюстрированы выше, не возникают, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда возникает какая-либо из вышеуказанных неисправностей, в качестве условия для запрещения управления амортизацией подрессоренной массы.
Если какая-либо из неисправностей, которые иллюстрированы выше, происходит в то время, как управление амортизацией подрессоренной массы выполняется, и, таким образом, определяется, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, вышеописанная модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, желательно устанавливается в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что надлежащее управление амортизацией подрессоренной массы не может выполняться при наличии такой неисправности.
В целом, электронный блок 1 управления характеризуется тем, что цикл управления становится дольше, когда нагрузка увеличивается, и он не может выполнять правильные вычисления, если значительно большие изменения происходят в цикле управления. На управление амортизацией подрессоренной массы оказывает влияние выполнение различных вычислений, как описано выше, с помощью цикла управления электронного блока 1 управления в качестве постоянной величины для использования в вычислениях модели управления или операциях фильтрации, например. Следовательно, если электронный блок 1 управления не работает в обычном цикле управления (например, около 8 мс), правильные результаты вычислений не могут быть получены при управлении амортизацией подрессоренной массы, и колебания подрессоренной массы не могут быть надлежащим образом амортизированы. Соответственно, система управления амортизацией подрессоренной массы устанавливает ситуацию, когда электронный блок 1 управления работает в обычном цикле управления (например, цикл управления сохраняется меньшим, чем 12 мс в течение данного периода времени (приблизительно несколько секунд)), в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда электронный блок 1 управления не работает в обычном цикле управления (например, цикл управления равен или дольше, чем 12 мс), в качестве условия для запрещения управления амортизацией подрессоренной массы.
Если электронный блок 1 управления перестает работать в обычном цикле управления в то время, как управление амортизацией подрессоренной массы выполняется, и, таким образом, определяется, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, вышеописанная модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, желательно устанавливается в блоке настройки модели окончания управления амортизацией подрессоренной массы. Это обусловлено тем, что надлежащее управление амортизацией подрессоренной массы не может проводиться, если электронный блок 1 управления приводится в вышеописанное состояние.
Далее, будут объяснены требования водителя. Требования водителя, упомянутые в данном документе, относятся, например, к состоянию или положению педали 61 тормоза, управляемой водителем, к требованию водителя на выполнение запроса амортизации подрессоренной массы и т.д. Таким образом, блок определения выполнения управления амортизацией подрессоренной массы может определять, удовлетворяется ли какое-либо из условий для разрешения управления амортизацией подрессоренной массы и условий для запрещения управления амортизацией подрессоренной массы, на основе, по меньшей мере, одного из различных требований водителя. Также, блок настройки модели начала управления амортизацией подрессоренной массы и блок настройки модели окончания управления амортизацией подрессоренной масс могут настраивать модель начала управления амортизацией подрессоренной массы или модель окончания управления амортизацией подрессоренной массы на основе, по меньшей мере, одного из различных требований водителя.
Управление педалью 61 тормоза водителем представляет намерение водителя уменьшить скорость транспортного средства 10 или остановить транспортное средство 10. С другой стороны, когда выполняется управление амортизацией подрессоренной массы, выходной сигнал блока приведения в движение транспортного средства может управляться так, чтобы применять усилие к транспортному средству 10 в направлении, в котором ускоряется транспортное средство 10. Следовательно, желательно сконфигурировать систему управления амортизацией подрессоренной массы так, что, когда водитель управляет педалью 61 тормоза, управление амортизацией подрессоренной массы не выполняется, принимая во внимание намерение водителя уменьшить скорость транспортного средства или т.п. Соответственно, система управления амортизацией подрессоренной массы первого варианта осуществления устанавливает ситуацию, когда операция торможения водителем не обнаруживается, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда операция торможения водителем обнаруживается, в качестве условия для запрещения управления амортизацией подрессоренной массы. В результате, водитель не будет чувствовать дискомфорт относительно торможения транспортного средства, которое будет меньшим, чем требуется, при управлении амортизацией, или чувствовать неожиданное ощущение ускорения. Кроме того, износ тормозных колодок может быть уменьшен или предотвращен. Событие операции торможения водителем может определяться в зависимости то того, принял ли электронный блок 1 управления сигнал обнаружения от блока 67 получения величины воздействия на педаль тормоза, например, или обнаружил ли электронный блок 1 управления изменение в сигнале обнаружения.
Когда определяется, что условие для запрещения управления амортизацией подрессоренной массы удовлетворяется, на основе операции торможения водителем во время выполнения управления амортизацией подрессоренной массы, желательно устанавливать вышеописанную модель окончания управления амортизацией подрессоренной массы, в которой управление амортизацией подрессоренной массы немедленно заканчивается, в блоке настройки модели окончания управления амортизацией подрессоренной массы для того, чтобы создавать благоприятный эффект, ощущаемый водителем, когда управление амортизацией подрессоренной массы запрещено, более полезным.
Также, управление амортизацией подрессоренной массы включает в себя управление для увеличения крутящего момента на колесах (движущей силы на колесах) ведущих колес WRR, WRL посредством увеличения выходного сигнала блока приведения в движение транспортного средства (например, увеличения выходного сигнала двигателя, инструктируя электродвигателю 44 увеличивать степень открытия дроссельной заслонки 43) и управление для уменьшения крутящего момента на колесах (движущей силы на колесах) ведущих колес WRR, WRL посредством уменьшения выходного сигнала (например, уменьшения выходного сигнала двигателя, инструктируя электродвигателю 44 уменьшать степень открытия дроссельной заслонки 43). Когда выходной сигнал блока приведения в движение транспортного средства должна быть уменьшена, усилие прилагается к транспортному средству 10 в направлении торможения, что согласуется с намерением водителя уменьшить скорость транспортного средства посредством операции торможения. Следовательно, даже при наличии операции торможения водителем, только управление амортизацией подрессоренной массы для увеличения выходной мощности блока приведения в движение транспортного средства может быть запрещено, а управление амортизацией подрессоренной массы для уменьшения выходного сигнала блока приведения в движение транспортного средства может быть разрешено.
В вышеописанном примере выполнение управления амортизацией подрессоренной массы разрешается или запрещается согласно управлению педалью 61 тормоза водителем. Если транспортное средство 10 имеет возможность работы при автоматическом управлении тормозом (например, управлением для автоматического создания усилия торможения в соответствии с расстоянием между самим транспортным средством и транспортным средством перед самим транспортным средством), реализованным в автоматическом режиме движения, или т.п., выполнение управления амортизацией подрессоренной массы может быть разрешено или запрещено в зависимости от присутствия усилия торможения, применяемого при автоматическом управлении тормозом. Например, ситуация, где интегрированный ЭБУ 156 отправляет команду ЭБУ 154 тормоза с тем, чтобы задействовать тормозной актуатор 93, чтобы создавать усилие торможения, устанавливается в качестве условия для запрещения управления амортизацией подрессоренной массы, а ситуация, где вышеуказанная команда не отправляется в ЭБУ 154 тормоза, устанавливается в качестве условия для разрешения управления амортизацией подрессоренной массы.
Некоторые водители могут не хотеть выполнения управления амортизацией подрессоренной массы, или водитель может не хотеть выполнения управления амортизацией подрессоренной массы в зависимости от обстоятельств. Например, когда транспортное средство движется по дороге, от которой принимаются колебания, которые являются слишком большими по величине, которые должны обрабатываться посредством управления амортизацией подрессоренной массы, водитель может счесть нежелательным выполнение управления амортизацией подрессоренной массы. Следовательно, если требуется водителем, например, настройка на стороне транспортного средства может быть изменена с помощью устройства изменения настроек, такого как диагностическое оборудование через CAN-шины на авторизованном предприятии, таком как автомобильный дилер, так что управление амортизацией подрессоренной массой не будет выполняться. Также, транспортное средство 10 может быть оборудовано переключателем или т.п. для запрещения выполнения управления амортизацией подрессоренной массы, так что водитель может изменять настройку согласно своему предпочтению. Система управления амортизацией подрессоренной массы этого примера устанавливает ситуацию, когда выполнение управления амортизацией подрессоренной массы не установлено как запрещенное, в качестве условия для разрешения управления амортизацией подрессоренной массы, и устанавливает ситуацию, когда выполнение управления амортизацией подрессоренной массы установлено как запрещенное, в качестве условия для запрещения управления амортизацией подрессоренной массы. В этом случае настройка условий предпочтительно выполняется, только когда выполняется вышеописанное управление с обратной связью.
Как описано выше, система управления амортизацией подрессоренной массы транспортного средства согласно первому варианту осуществления изобретения может надлежащим образом выполнять или запрещать управление амортизацией подрессоренной массы при различных условиях, которые описаны выше. Также, система управления амортизацией подрессоренной массы транспортного средства может начинать управление амортизацией подрессоренной массы согласно соответствующей модели начала управления амортизацией подрессоренной массы и заканчивать управление амортизацией подрессоренной массы, которое выполняется, согласно соответствующей модели окончания управления амортизацией подрессоренной массы при различных условиях, которые описаны выше.
Пока блок определения выполнения управления амортизацией подрессоренной массы первого варианта осуществления определяет, удовлетворяется ли какое-либо из условий для разрешения управления амортизацией подрессоренной массы и условий для запрещения управления амортизацией подрессоренной массы, согласно, по меньшей мере, одному из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя, как описано выше, вышеуказанное определение может быть сделано согласно только комбинации произвольно выбранных условий из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя. Кроме того, вышеуказанное определение может быть сделано согласно другим условиям, в дополнение к условиям работы транспортного средства 10, условиям состояния транспортного средства 10 и требованиям водителя.
В то время как блок настройки модели начала управления амортизацией подрессоренной массы первого варианта осуществления устанавливает модель начала управления амортизацией подрессоренной массы согласно, по меньшей мере, одному из рабочих состояний транспортного средства 10, условий состояния транспортного средства 10 и требований водителя, как описано выше, модель начала может быть установлена согласно только комбинации произвольно выбранных условий из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя. Кроме того, модель начала управления амортизацией подрессоренной массы может быть установлена согласно другим условиям в дополнение к условиям работы транспортного средства 10, условиям состояния транспортного средства 10 и требованиям водителя. Аналогичным образом, блок настройки модели окончания управления амортизацией подрессоренной массы может быть сконфигурирован так, чтобы устанавливать модель окончания управления амортизацией подрессоренной массы согласно только комбинации произвольно выбранных условий из условий работы транспортного средства 10, условий состояния транспортного средства 10 и требований водителя. Также, модель окончания управления амортизацией подрессоренной массы может быть установлена согласно другим условиям в дополнение к условиям работы транспортного средства 10, условиям состояния транспортного средства 10 и требованиям водителя.
Далее, система управления амортизацией подрессоренной массы транспортного средства согласно второму варианту осуществления изобретения будет описана со ссылкой на фиг. 6-10. Система управления амортизацией подрессоренной массы транспортного средства согласно второму варианту осуществления сконфигурирована аналогично системе первого варианта осуществления, но выполняет дополнительное управление, которое будет описано ниже. Транспортное средство 10, иллюстрированное в данном документе, имеет, по существу, ту же конструкцию, что и транспортное средство первого варианта осуществления.
Транспортное средство 10 второго варианта осуществления оборудовано системой управления верхним ограничением скорости для движения транспортного средства при ограничении скорости транспортного средства до установленной верхней предельной скорости и электронный блок 1 управления, который предоставляет систему управления верхним ограничением скорости, включает в себя контроллер верхнего ограничения скорости, который реализует управление верхним ограничением скорости. Управление верхним ограничением скорости относится к управлению для уменьшения скорости транспортного средства 10 посредством наложения ограничения на конечный требуемый водителем крутящий момент, когда скорость транспортного средства 10 превышает указанную скорость, которая немного меньше, чем установленная верхняя предельная скорость, например, так, что скорость транспортного средства 10 не превышает установленную верхнюю предельную скорость. Более конкретно, управление верхним ограничением скорости относится к управлению (так называемому управлению ограничителем скорости) для установки максимальной скорости транспортного средства в качестве установленной верхней предельной скорости заранее и управления транспортным средством 10 так, что его скорость не превышает максимальной скорости. Управление верхним ограничением скорости может также включать в себя управление (так называемый круиз-контроль), при котором верхняя предельная скорость устанавливается в требуемую скорость движения, заданную водителем, и транспортное средство движется со скоростью, которая равна или ниже, чем установленная таким образом верхняя предельная скорость. В то время как управление ограничителем скорости иллюстрировано в качестве типичного примера управления верхним ограничением скорости в этом варианте осуществления, следует понимать, что круиз-контроль может также выполняться аналогичным образом, что и пример управления изобретения, как описано ниже.
Управление верхним ограничением скорости выполняется следующим образом: когда скорость транспортного средства 10 превышает заданную скорость, требуемый водителем крутящий момент умножается на данный коэффициент усиления верхнего ограничителя скорости и, таким образом, уменьшается, чтобы предоставлять уменьшенный конечный требуемый водителем крутящий момент, так что скорость транспортного средства 10 не превышает установленного верхнего предельного значения.
В этой связи, строго говоря, конечный требуемый водителем крутящий момент может быть определен посредством выполнения сглаживающей обработки или обработки с применением ограничений с помощью верхних и нижних предельных значений, например, по требуемому водителем крутящему моменту, соответствующему запросу от водителя на приведение в движение. Следовательно, для того, чтобы улучшать эффективность управления амортизацией подрессоренной массы, желательно предоставлять величину управляющего воздействия по амортизации подрессоренной массы сумматору (C1a) контроллера 2 приведения в движение посредством сложения, после того как выполняется сглаживание или т.п., а именно, приблизительно на последнем этапе, ближнем к этапу вычисления для определения конечного требуемого водителем крутящего момента (например, непосредственно перед этапом вычисления для определения конечного требуемого водителем крутящего момента). Следовательно, операция умножения требуемого водителем крутящего момента на коэффициент усиления верхнего ограничителя скорости выполняется перед тем, как выполняется вышеупомянутое сложение. Во втором варианте осуществления система управления амортизацией подрессоренной массы и система управления верхним ограничением скорости сконфигурированы, принимая во внимание вышеупомянутый момент.
Фиг. 6 является блок-схемой управления, схематически показывающей конфигурации системы управления амортизацией подрессоренной массы и системы верхнего ограничения скорости согласно второму варианту осуществления изобретения. Конфигурации контроллера 2 приведения в движение и т.д., отличные от контроллера 4 верхнего ограничения скорости электронного блока 1 управления, в блок-схеме управления на фиг. 6 идентичны конфигурациям первого варианта осуществления, который показан на фиг. 3.
Контроллер 4 верхнего ограничения скорости состоит из блока 4a настройки коэффициента усиления верхнего ограничителя скорости, который устанавливает коэффициент K∙Vlim верхнего ограничителя скорости в соответствии со скоростью V транспортного средства, и блока 4b настройки управления верхним ограничением скорости, который умножает коэффициент K∙Vlim верхнего ограничителя скорости на требуемый водителем крутящий момент, соответствующий запросу от водителя на приведение в движение (т.е., требуемый водителем крутящий момент, полученный блоком (C1) вычисления требуемого водителем крутящего момента). Коэффициент K∙Vlim усиления верхнего ограничителя скорости является коэффициентом (коэффициентом ограничения требуемого водителем крутящего момента для ограничения скорости транспортного средства до верхнего предела) для наложения ограничения на величину конечного требуемого водителем крутящего момента посредством уменьшения требуемого водителем крутящего момента, полученного блоком (C1) вычисления требуемого водителем крутящего момента во время выполнения управления верхним ограничением скорости, и может быть получен из данных карты соответствия, как показано в качестве примера на фиг. 7 в качестве примера. Согласно данным карты соответствия коэффициент K∙Vlim верхнего ограничителя скорости устанавливается в "1" в диапазоне скорости транспортного средства до вышеуказанной скорости V0 (=Vmax-α), и коэффициент K∙Vlim усиления верхнего ограничителя скорости постепенно уменьшается от момента времени, когда скорость транспортного средства превышает указанную скорость V0 до момента времени, когда скорость транспортного средства становится равной установленной верхней предельной скорости Vmax. В этом примере коэффициент K∙Vlim усиления верхнего ограничителя скорости при установленной верхней предельной скорости Vmax равен "0". Следовательно, если скорость транспортного средства превышает указанное значение V0, конечный требуемый водителем крутящий момент постепенно уменьшается и становится равным "0", когда скорость транспортного средства достигает установленного верхней предельной скорости Vmax. Таким образом, когда скорость транспортного средства превышает указанную скорость V0, транспортное средство 10 управляется так, что скорость транспортного средства не превышает установленной верхней предельной скорости Vmax.
Во втором варианте осуществления, требуемый водителем крутящий момент, подаваемый в блок 3a преобразования крутящего момента контроллера 3 амортизации подрессоренной массы, а именно, требуемый водителем крутящий момент, представляющий запрос от водителя на приведение в движение, предоставляется блоку 4b настройки управления верхним ограничением скорости. Затем, в сумматоре (C1a) контроллера 2 приведения в движение, установленный результат величины управляющего воздействия по амортизации подрессоренной массы, которая была преобразована в крутящий момент приведения в движение в блоке 3d преобразования крутящего момента, складывается с требуемым водителем крутящим моментом, который был умножен для управления верхним ограничением скорости в блоке 4b настройки управления верхнего ограничения скорости.
Система управления амортизацией подрессоренной массы и система управления верхним ограничением скорости выполняют управление амортизацией подрессоренной массы и управление верхним ограничением скорости в одно и то же время, когда скорость транспортного средства 10 превышает указанную скорость V0. В это время требуемый водителем крутящий момент, полученный в блоке (C1) вычисления требуемого водителем крутящего момента, умножается на коэффициент K∙Vlim усиления верхнего ограничителя скорости (<1), чтобы уменьшаться в контроллере 4 верхнего ограничения скорости. В результате, выходной сигнал двигателя 20 уменьшается в транспортном средстве 10, и транспортное средство замедляется так, что скорость V транспортного средства ограничивается установленной верхней предельной скоростью Vmax. Однако, когда результат установки величины управляющего воздействия по амортизации подрессоренной массы является положительным значением, результат установки величины управляющего воздействия по амортизации подрессоренной массы складывается с требуемым водителем крутящим моментом, который был уменьшен согласно коэффициенту K∙Vlim усиления верхнего ограничителя скорости в сумматоре (C1a); следовательно, конечный требуемый водителем крутящий момент, полученный посредством сложения, становится большим, чем требуемый водителем крутящий момент, который был уменьшен при управлении верхним ограничением скорости, и скорость транспортного средства 10 может не быть ограничена соответствующей верхней предельной скоростью, установленной при управлении верхним ограничением скорости.
В системе управления амортизацией подрессоренной массы второго варианта осуществления, поэтому, управление амортизацией подрессоренной массы запрещено во время выполнения управления верхним ограничением скорости.
Как показано в блок-схеме последовательности операций на фиг. 8, например, контроллер амортизации подрессоренной массы получает информацию о скорости V транспортного средства (этап ST1) и сравнивает скорость V транспортного средства с вышеупомянутой указанной скоростью V0 (этап ST2). На этапе ST1 контроллер амортизации подрессоренной массы может получать информацию о скорости V транспортного средства, рассчитанную из скоростей соответствующих колес WFR, WFL, WRR, WRL, как описано выше, или может получать информацию о скорости V транспортного средства, обнаруженную устройством обнаружения скорости транспортного средства, таким как датчик скорости транспортного средства (не показан).
Когда контроллер амортизации подрессоренной массы определяет на этапе ST2, что скорость V транспортного средства равна или выше, чем указанная скорость V0, он запрещает выполнение управления амортизацией подрессоренной массы (этап ST3), поскольку управление верхним ограничением скорости выполняется контроллером 4 верхнего ограничения скорости. Например, на этапе S3 устанавливается флаг запрещения управления амортизацией подрессоренной массы, так что сумматору (C1a) запрещается принимать результат установки величины управляющего воздействия по амортизации подрессоренной массы, и требуемый водителем крутящий момент, который был обработан (умножен на коэффициент усиления) в блоке 4b настройки управления верхним ограничением скорости, передается блоку (C2) определения команды управления без сложению в сумматоре (C1a). В результате, блок (C2) определения команды управления принимает требуемый водителем крутящий момент, который был уменьшен под управлением верхним ограничением скорости в блоке 4b настройки управления верхним ограничением скорости, в качестве окончательного требуемого водителем крутящего момента.
В этом случае контроллер верхнего ограничения скорости устанавливает коэффициент K∙Vlim усиления верхнего ограничителя скорости в значение, которое меньше "1" и сопоставимо со скоростью V транспортного средства, в блоке 4a настройки коэффициента усиления верхнего ограничителя скорости, и умножает требуемый водителем крутящий момент, полученный в блоке (C1) вычисления требуемого водителем крутящего момента, на коэффициент K∙Vlim (<1) усиления верхнего ограничителя крутящего момента в блоке 4b настройки управления верхнего ограничения скорости. Затем, контроллер верхнего ограничения скорости отправляет результат умножения контроллеру 2 приведения в движение. Результат умножения доставляется в блок (C2) определения команды управления без сложения в сумматоре (C1a). Таким образом, контроллер приведения в движение рассматривает требуемый водителем крутящий момент, который был уменьшен блоком 4b настройки управления верхним ограничением скорости под управлением верхним ограничением скорости, как конечный требуемый водителем крутящий момент и управляет блоком приведения в движение транспортного средства так, чтобы уменьшать конечный требуемый водителем крутящий момент. Поскольку величина управляющего воздействия для управления верхним ограничением скорости не изменяется, транспортное средство 10 выполняет управление верхним ограничением скорости, когда скорость V транспортного средство необходимо ограничивать, так, чтобы управлять скоростью V транспортного средства до соответствующей скорости, которая ограничена установленной верхней предельной скоростью Vmax. Если вышеописанная обработка, такая как сглаживание, выполняется на этапе, следующим за блоком 4b настройки управления верхним ограничением скорости, требуемый водителем крутящий момент, который был уменьшен в блоке 4b настройки управления верхним ограничением скорости и затем подвергнут сглаживанию или т.п., передается сумматору (C1a).
С другой стороны, если на этапе ST2 определяется, что скорость V транспортного средства ниже, чем заданная скорость V0, то управление верхним ограничением скорости не выполняется; следовательно, определяется, что управление амортизацией подрессоренной массы может выполняться без воздействия от управления верхним ограничением скорости, и выполнение управления амортизацией подрессоренной массы разрешается (этап ST4). Например, на этапе ST4 устанавливается флаг разрешения управления амортизацией подрессоренной массы, и сложение выполняется в сумматоре (C1a).
В этом случае контроллер верхнего ограничения скорости устанавливает коэффициент K∙Vlim усиления верхнего ограничителя скорости "1" в блоке 4a настройки коэффициента усиления верхнего ограничителя скорости и умножает требуемый водителем крутящий момент, полученный в блоке (C1) вычисления требуемого водителем крутящего момента, на коэффициент K∙Vlim (=1) усиления верхнего ограничителя крутящего момента в блоке 4b настройки управления верхнего ограничения скорости. Затем, контроллер верхнего ограничения скорости предоставляет результат умножения (= требуемому водителем крутящему моменту, полученному в блоке (C1) вычисления требуемого водителем крутящего момента) контроллеру приведения в движение. Результат умножения передается сумматору (C1a), где результат установки величины управляющего воздействия по амортизации подрессоренной массы блока 3d преобразования крутящего момента добавляется к результату умножения, и затем передается блоку (C2) определения команды управления. Следовательно, когда необходимо выполнять управление амортизацией подрессоренной массы в транспортном средстве 10, управление амортизацией подрессоренной массы выполняется с величиной управляющего воздействия по амортизации подрессоренной массы, соответствующей необходимости управления амортизацией, тем же образом, что и указанный в первом варианте осуществления. В этом случае операция умножения требуемого водителем крутящего момента на коэффициент K∙Vlim усиления верхнего ограничителя скорости в блоке 4b настройки управления верхним ограничением скорости может не выполняться. Также, если вышеописанная обработка, такая как сглаживание, выполняется на этапе, следующем за блоком 4b настройки управления верхним ограничением скорости, крутящий момент, полученный посредством применения обработки (например, сглаживания) по требуемому водителем крутящему моменту, полученному от блока (C1) вычисления требуемого водителем крутящего момента, передается сумматору (C1a).
Алгоритм управления на фиг. 8, как иллюстрировано выше, неоднократно выполняется во время движения транспортного средства 10. Соответственно, когда скорость V транспортного средства становится ниже, чем указанная скорость V0 после выполнения управления верхним ограничением скорости, управление переходит к этапу ST4, так что управление амортизацией подрессоренной массы, которое было запрещено, разрешается.
Система управления амортизацией подрессоренной массы второго варианта осуществления запрещает выполнение управления амортизацией подрессоренной массы, когда скорость V транспортного средства нужно ограничить, так что управление верхним ограничением скорости для управления скоростью транспортного средства до соответствующей скорости может выполняться. С другой стороны, колебания подрессоренной массы, которые возникают в кузове транспортного средства, не могут амортизироваться или подавляться в транспортном средстве 10 в это время. Если колебания подрессоренной массы слишком малы для того, чтобы быть замеченными или восприняты водителем, например, и не настолько велики, чтобы приводить к изменениям в характере поведения транспортного средства 10, например, высший приоритет должен быть отдан выполнению соответствующего управления верхним ограничением скорости для управления скоростью V транспортного средства, чтобы не превышать установленную верхнюю предельную скорость Vmax. С другой стороны, если колебания подрессоренной массы настолько велики, что они могут быть замечены или восприняты водителем, например, и настолько велики, чтобы приводить к изменениям в характере поведения транспортного средства 10, например, желательно амортизировать колебания подрессоренной массы с помощью управления амортизацией подрессоренной массы, в то же время ограничивая скорость V транспортного средства с помощью управления верхним ограничением скорости.
В системе управления амортизацией подрессоренной массы второго варианта осуществления, поэтому, управление амортизацией подрессоренной массы немедленно не запрещается в ответ на определение того, что скорость V транспортного средства становится равной или выше, чем указанная скорость V0. Предпочтительно, когда скорость V транспортного средства становится равной или выше, чем указанная скорость V0, величина управляющего воздействия по амортизации подрессоренной массы (более конкретно, результат установки величины управляющего воздействия по амортизации подрессоренной массы) может регулироваться в соответствии со скоростью V транспортного средства, и управление верхним ограничением скорости может начинаться в то время, как выполняется управление амортизацией подрессоренной массы.
Например, поскольку уходит больше времени для того, чтобы скорость V транспортного средства достигла верхней предельной скорости Vmax, когда скорость V транспортного средства ниже, контроллер 3 амортизации подрессоренной массы сконфигурирован так, чтобы применять обработку с применением ограничений с использованием верхнего и нижнего предельных значений или процесс оценки результата установки величины управляющего воздействия по амортизации подрессоренной массы, согласно скорости V транспортного средства, с тем, чтобы уменьшать результат установки величины управляющего воздействия по амортизации подрессоренной массы. Обработка с применением ограничений с использованием верхнего и нижнего предельных значений или т.п. выполняется по величине корректировки требуемого водителем крутящего момента Tw0 на колесах, подаваемого в блок 3d преобразования крутящего момента, или результату установки величины управляющего воздействия по амортизации подрессоренной массы, полученной в блоке 3d преобразования крутящего момента.
Обработка с применением ограничений с использованием верхнего и нижнего предельных значений накладывает ограничение на положительное значение величины корректировки требуемого водителем крутящего момента Tw0 на колесах или результат установки величины управляющего воздействия по амортизации подрессоренной массы с помощью верхнего ограничивающего значения, и накладывает ограничение на отрицательное значение величины корректировки требуемого водителем крутящего момента Tw0 на колесах или результат установки величины управляющего воздействия по амортизации подрессоренной массы с помощью нижнего ограничивающего значения, таким образом, чтобы уменьшать величину управляющего воздействия по амортизации подрессоренной массы. С помощью обработки с применением ограничений, использующей верхнее и нижнее предельные значения, выполняемой таким образом, сумматор (C1a) принимает результат установки величины управляющего воздействия по амортизации подрессоренной массы, который уменьшается по сравнению со временем, когда обработка с применением ограничений с использованием верхнего и нижнего предельных значений не выполняется.
Верхнее ограничивающее значение, которое является положительным значением, устанавливается в большее значение в положительном направлении, когда скорость V транспортного средства является более низкой. С другой стороны, нижнее ограничивающее значение, которое является отрицательным значением, устанавливается в большее значение в отрицательном направлении, когда скорость V транспортного средства является более низкой. Следовательно, когда скорость V транспортного средства становится равной или превышает заданную скорость V0, величина уменьшения величины управляющего воздействия по амортизации подрессоренной массы уменьшается, когда скорость V транспортного средства является более низкой, и управление амортизацией подрессоренной массы, которое проводилось бы, если управление верхним ограничением скорости не было выполнено, выполняется с помощью величины управляющего воздействия по амортизации подрессоренной массы, которая близка к величине управляющего воздействия перед выполнением обработки с применением ограничений. В этом случае, величина управляющего воздействия управления верхним ограничением скорости увеличивается с величиной управляющего воздействия по амортизации подрессоренной массы. Однако, если скорость V транспортного средства относительно низка, верхнее ограничивающее значение устанавливается в соответствующее значение посредством эксперимента или т.п., так что надлежащее управление верхним ограничением скорости может быть проведено, посредством чего скорость V транспортного средства может управляться так, чтобы не превышать установленную верхнюю предельную скорость Vmax. Верхнее ограничивающее значение устанавливается так, что оптимальное управление верхним ограничением скорости может выполняться вместе с управлением амортизацией подрессоренной массы по всему диапазону от скорости V0 до установленной верхней предельной скорости Vmax. Здесь, верхнее ограничивающее значение и нижнее ограничивающее значение могут быть установлены в "0" при установленной верхней предельной скорости Vmax, например. В этом случае управление амортизацией подрессоренной массы прекращает выполняться, когда скорость V транспортного средства становится равной установленной верхней предельной скорости Vmax, и соответствующее управление верхним ограничением скорости может выполняться с помощью верхней предельной скорости Vmax, установленной в качестве верхнего предела.
Процесс оценки выполняется, когда скорость V транспортного средства становится равной или выше, чем скорость V0, с тем, чтобы ограничивать величину (или степень) изменения величины корректировки требуемого водителем крутящего момента Tw0, подаваемого в блок 3d преобразования крутящего момента, или величину (или степень) изменения результата установки величины управляющего воздействия по амортизации подрессоренной массы, полученной в блоке 3d преобразования крутящего момента. Посредством процесса оценки сумматор (C1a) получает результат установки величины управляющего воздействия по амортизации подрессоренной массы, которая уменьшена по сравнению с величиной в случае, когда процесс оценки не выполняется.
Предельное значение величины изменения величины управляющего воздействия по амортизации подрессоренной массы, используемое в процессе оценки, получено посредством эксперимента или т.п. как значение, с помощью которого требуемое ограничение может быть наложено на величину изменения. Предельное значение может быть предварительно определенным значением или может изменяться со скоростью V транспортного средства. В последнем случае, где предельное значение изменяется со скоростью V транспортного средства, предельное значение может быть установлено в большее значение, когда скорость транспортного средства является более высокой.
Для того, чтобы выполнять подходящее управление амортизацией подрессоренной массы и управление верхним ограничением скорости в одно и то же время после того, как скорость V транспортного средства становится равной или выше скорости V0, следующая схема управления может быть применена.
Например, величина CV управляющего воздействия по амортизации подрессоренной массы обрабатывается в процессе верхнего ограничения скорости так, чтобы уменьшаться или корректироваться, и управление амортизацией подрессоренной массы выполняется с помощью скорректированной таким образом величины CV управляющего воздействия по амортизации подрессоренной массы. Скорректированное значение величины CV управляющего воздействия по амортизации подрессоренной массы получается посредством корректировки (и уменьшения) величины CV управляющего воздействия по амортизации подрессоренной массы, полученной контроллером 3 амортизации подрессоренной массы, с помощью коэффициента ограничения для ограничения величины управляющего воздействия по амортизации подрессоренной массы для того, чтобы ограничивать скорость транспортного средства верхним предельным значением. Соответственно, управление амортизацией подрессоренной массы ограничивается посредством уменьшения величины управляющего воздействия с помощью коэффициента ограничения величины управляющего воздействия по амортизации подрессоренной массы, предусмотренного для ограничения скорости транспортного средства верхним предельным значением.
Коэффициент ограничения величины управляющего воздействия по амортизации подрессоренной массы, предусмотренный для ограничения скорости транспортного средства верхним предельным значением, является коэффициентом, который накладывает ограничение на управление амортизацией подрессоренной массы посредством уменьшения величины CV управляющего воздействия по амортизации подрессоренной массы, полученной контроллером амортизации подрессоренной массы во время выполнения управления верхним ограничением скорости. Например, коэффициент ограничения величины управляющего воздействия устанавливается как коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы, предусмотренный для ограничения скорости транспортного средства верхним предельным значением. Аналогично коэффициенту K∙Vlim усиления верхнего ограничителя скорости, который описан выше, коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы для ограничения скорости транспортного средства верхним предельным значением принимает разные значения (т.е., изменяется) в зависимости от скорости V транспортного средства и, таким образом, устанавливается в форме данных карты соответствия. Более конкретно, коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы устанавливается в "1", когда скорость V транспортного средства равна или ниже, чем вышеуказанное определенное значение V0 (=Vmax-α), и постепенно уменьшается от "1" после того, как скорость V транспортного средства превышает указанное значение V0 до тех пор, пока скорость V транспортного средства не станет равной установленной верхней предельной скорости Vmax. В транспортном средстве 10, поэтому, после того, как скорость транспортного средства превышает заданную скорость V0, управление амортизацией подрессоренной массы ограничивается до степени, которая увеличивается, когда скорость V транспортного средства увеличивается. Коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы при установленной верхней предельной скорости Vmax необязательно устанавливается в "0". Соответственно, транспортное средство 10 может находиться под управлением амортизацией подрессоренной массы, когда скорость транспортного средства становится равной установленной верхней предельной скорости Vmax. В этом примере коэффициент K∙Vlim усиления верхнего ограничителя скорости используется в качестве коэффициента K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы. Однако, если управление амортизацией подрессоренной массы и управление верхним ограничением скорости могут выполняться соответствующим благоприятным образом, скорость уменьшения (или наклон) коэффициента K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы от указанной скорости V0 до установленной верхней предельной скорости Vmax может отличаться от скорости уменьшения коэффициента K∙Vlim усиления верхнего ограничителя скорости.
Фиг. 9 является блок-схемой управления, схематически представляющей конфигурацию системы управления амортизацией подрессоренной массы и системы управления верхним ограничением скорости вышеописанного случая. Конфигурация, которая показана в блок-схеме управления на фиг. 9, получена посредством суммирования структуры, ассоциированной с корректировкой величины CV управляющего воздействия по амортизации подрессоренной массы, с показанной в блок-схеме управления на фиг. 6, которая описана выше.
В качестве структуры, ассоциированной с корректировкой, подготовлен блок 3e корректировки величины управляющего воздействия по амортизации подрессоренной массы, который умножает коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы на величину CV управляющего воздействия по амортизации подрессоренной массы (т.е., величину корректировки требуемого водителем крутящего момента Tw0 на колесах, поданного в блок 3d преобразования крутящего момента, или результат установки величины управляющего воздействия по амортизации подрессоренной массы в блоке 3d преобразования крутящего момента). В блок-схеме управления на фиг. 9 блок 3e корректировки величины управляющего воздействия по амортизации подрессоренной массы расположен ниже по потоку обработки, чем блок 3d преобразования крутящего момента, и функционирует так, чтобы умножать результат установки величины управляющего воздействия по амортизации подрессоренной массы в блоке 3d преобразования крутящего момента на коэффициент K∙Vlim1 (= коэффициенту K∙Vlim усиления верхнего ограничителя скорости) усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы.
Управление амортизацией подрессоренной массы, как описано выше, будет дополнительно объяснено со ссылкой на блок-схему последовательности операций на фиг. 10. Первоначально, контроллер амортизации подрессоренной массы получает информацию о скорости V транспортного средства (этап ST11), как и в случае, иллюстрированном выше со ссылкой на фиг. 8.
Также, контроллер амортизации подрессоренной массы получает величину CV управляющего воздействия по амортизации подрессоренной массы (этап ST12). В этом примере результат вычисления блока 3d преобразования крутящего момента, а именно, результат установки величины управляющего воздействия по амортизации подрессоренной массы, получается тем же образом, что и в первом варианте осуществления.
Впоследствии, контроллер амортизации подрессоренной массы сравнивает скорость V транспортного средства с вышеупомянутым указанным значением V0 (этап ST13).
Если контроллер амортизации подрессоренной массы определяет на этапе ST13, что скорость V транспортного средства равна или выше скорости V0, выполняется управление верхним ограничением скорости; следовательно, величина управляющего воздействия по амортизации подрессоренной массы, полученная на этапе ST12 (т.е., результат настройки управления амортизацией подрессоренной массы), уменьшается/корректируется согласно скорости V транспортного средства, так, чтобы ограничивать управление амортизацией подрессоренной массы.
Более конкретно, контроллер амортизации подрессоренной массы получает коэффициент K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы, предусмотренный для ограничения скорости транспортного средства до верхнего предельного значения, согласно скорости V транспортного средства (этап ST14). В этом примере коэффициент K∙Vlim усиления верхнего ограничителя скорости используется в качестве коэффициента K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы. Соответственно, контроллер амортизации подрессоренной массы принимает коэффициент K∙Vlim усиления верхнего ограничителя скорости, установленный в соответствии со скоростью V в блоке 4a установки коэффициента усиления верхнего ограничителя скорости, и использует коэффициент K∙Vlim в качестве коэффициента K∙Vlim1 усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы.
Далее, блок 3e корректировки величины управляющего воздействия по амортизации подрессоренной массы контроллера амортизации подрессоренной массы умножает величину CV управляющего воздействия по амортизации подрессоренной массы (результат установки величины управляющего воздействия по амортизации подрессоренной массы) этапа ST12 на коэффициент K∙Vlim1 (= коэффициенту K∙Vlim усиления верхнего ограничителя скорости) усиления ограничителя величины управляющего воздействия по амортизации подрессоренной массы, так, чтобы уменьшать/корректировать величину CV управляющего воздействия по амортизации подрессоренной массы (этап ST15). После выполнения этапа ST15 величина CV управляющего воздействия по амортизации подрессоренной массы, которая была скорректирована, устанавливается в качестве величины CV управляющего воздействия по амортизации подрессоренной массы для использования в управлении амортизацией подрессоренной массы.
Если контроллер амортизации подрессоренной массы определяет, что скорость V транспортного средства ниже, чем заданная скорость V0, с другой стороны, управление верхним ограничением скорости не выполняется, и определяется, что управление амортизацией подрессоренной массы выполняется без воздействия от управления верхним ограничением скорости. Следовательно, величина CV управляющего воздействия по амортизации подрессоренной массы, полученная на этапе ST12 (результат установки величины управляющего воздействия по амортизации подрессоренной массы), устанавливается в качестве величины CV управляющего воздействия по амортизации подрессоренной массы для использования в управлении амортизацией подрессоренной массы.
В транспортном средстве 10 управление амортизацией подрессоренной массы выполняется с помощью установленной таким образом величины CV управляющего воздействия по амортизации подрессоренной массы (этап ST16). На этапе ST16 установленная величина CV управляющего воздействия по амортизации подрессоренной массы передается сумматору (C1a), где установленная величина CV управляющего воздействия по амортизации подрессоренной массы и требуемый водителем крутящий момент, который был умножен на коэффициент K∙Vlm усиления верхнего ограничителя скорости в блоке 4b настройки управления верхним ограничением скорости, складываются вместе. Затем, на этапе ST16, результат сложения передается блоку (C2) определения команды управления, чтобы предоставлять команду управления, и выходной сигнал двигателя 20 управляется на основе команды управления.
Например, когда скорость V транспортного средства ниже, чем заданная скорость V0, управление верхним ограничением скорости не выполняется, и управление амортизацией подрессоренной массы в обычное время выполняется на основе величины CV управляющего воздействия по амортизации подрессоренной массы (результата установки величины управляющего воздействия по амортизации подрессоренной массы, полученной на этапе ST12. Следовательно, в транспортном средстве 10 колебания подрессоренной массы, которые возникают в кузове транспортного средства, надлежащим образом амортизируются. "Обычное время", упомянутое выше, относится ко времени, когда величина CV управляющего воздействия по амортизации подрессоренной массы не уменьшается/корректируется в блоке 3e корректировки величины управляющего воздействия по амортизации подрессоренной массы.
Когда скорость V транспортного средства равна или выше, чем заданная скорость V0, с другой стороны, управление амортизацией подрессоренной массы выполняется с помощью величины управляющего воздействия, которая уменьшена так, чтобы быть меньше величины управляющего воздействия по амортизации в обычное время, а именно, на основе величины CV управляющего воздействия по амортизации подрессоренной массы, которая была скорректирована на этапе ST15, и управление верхним ограничением скорости также выполняется в это же время. В это время, поскольку скорректированное значение CV управляющего воздействия по амортизации подрессоренной массы добавляется, величина управляющего воздействия при управлении верхним ограничением скорости становится выше, чем величина управляющего воздействия в обычное время при той же скорости транспортного средства, и замедление транспортного средства после того, как скорость V транспортного средства превышает указанное значение V0, становится меньше, чем при управлении в обычное время. Однако, в это время управление амортизацией подрессоренной массы полностью не запрещается, а именно, управление амортизацией подрессоренной массы выполняется с величиной CV управляющего воздействия по амортизации подрессоренной массы, которая уменьшена, чтобы быть меньше величины управляющего воздействия в обычное время, для достижения благоприятного управления верхним ограничением скорости; следовательно, эффект ограничения скорости V под управлением верхним ограничением скорости и полезный эффект, обеспечиваемый амортизацией колебаний подрессоренной массы, могут быть получены.
Управление амортизацией колебаний для транспортного средства 10 не ограничено управлением амортизацией подрессоренной массы для амортизации колебаний подрессоренной массы, как описано выше, но может включать в себя различные управления. В транспортном средстве 10 первого и второго вариантов осуществления, которые описаны выше, когда два или более управления амортизацией колебаний, включающих в себя управление амортизацией подрессоренной массой, выполняются в одно и то же время, управление амортизацией подрессоренной массой останавливается, только если какое-либо из условий для запрещения управления амортизацией подрессоренной массы, которые описаны выше, удовлетворяется.
В то время как транспортное средство 10 первого и второго вариантов осуществления применяет двигатель 20 в качестве своего источника мощности (блока приведения в движение транспортного средства), блок приведения в движение транспортного средства, ассоциированный с управлением амортизацией подрессоренной массы, может быть комбинацией двигателя и электродвигателя, если транспортное средство является гибридным транспортным средством, или может быть электродвигателем, если транспортное средство является электрическим транспортным средством.
В транспортном средстве 10 тормозной момент на колесах (сила торможения на колесах), прикладываемый к ведущим колесам WRR, WRL тормозной системой, может называться, в другом способе, усилием для уменьшения величины крутящего момента на колесах (крутящего момента приведения в движение на колесах), оказываемого на ведущие колеса WRR, WRL. Соответственно, тормозная система может функционировать как блок приведения в движение транспортного средства, аналогично двигателю 20 или трансмиссии 30, и может быть использована в управлении амортизацией подрессоренной массы. В этом случае колебания подрессоренной массы амортизируются посредством уменьшения крутящего момента на колесах (движущей силы на колесах) ведущих колес WRR, WRL.
Как описано выше, система управления амортизацией подрессоренной массы транспортного средства согласно изобретению полезна, когда управление амортизацией подрессоренной массы выполняется для того, чтобы амортизировать колебания подрессоренной массы.
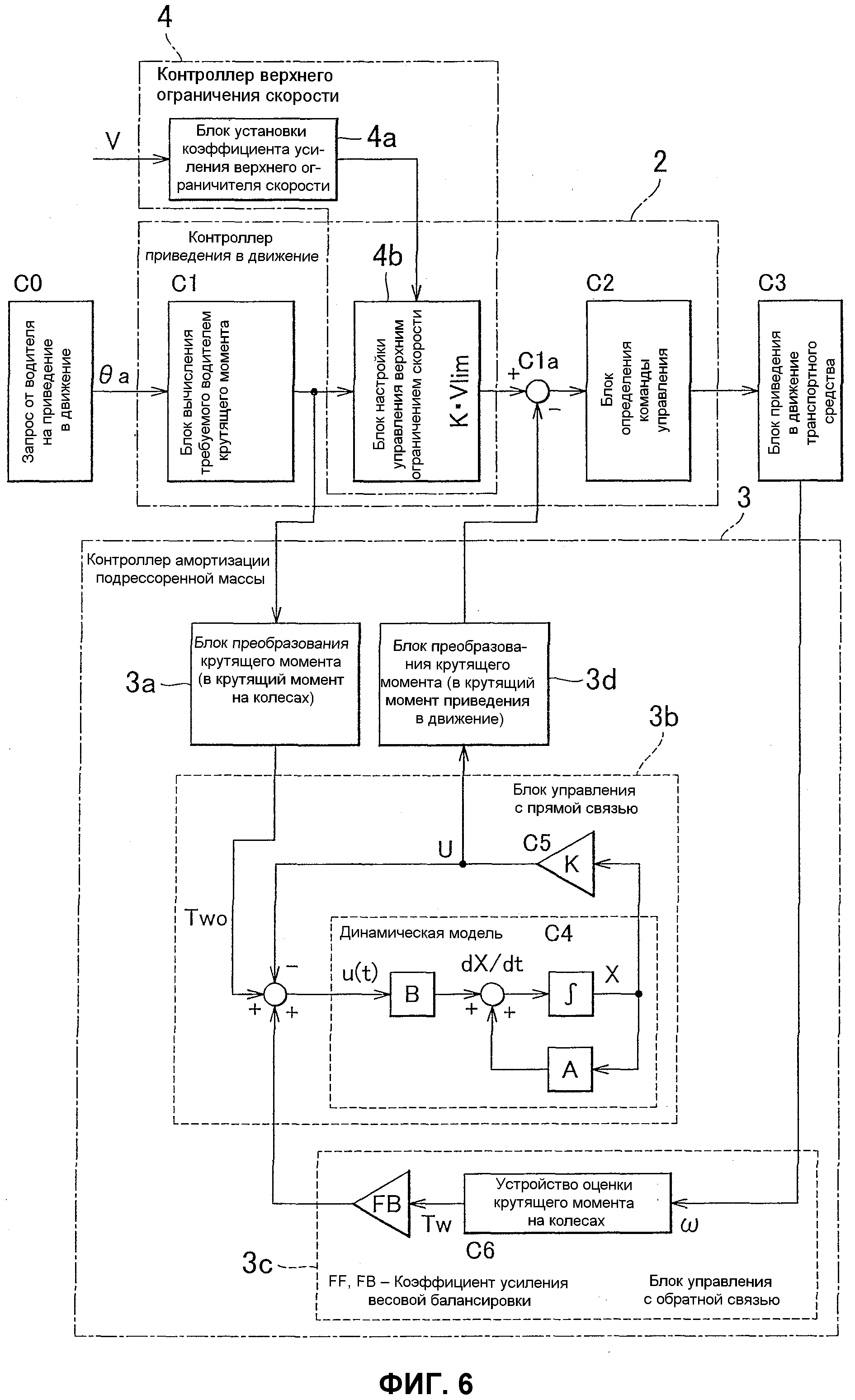
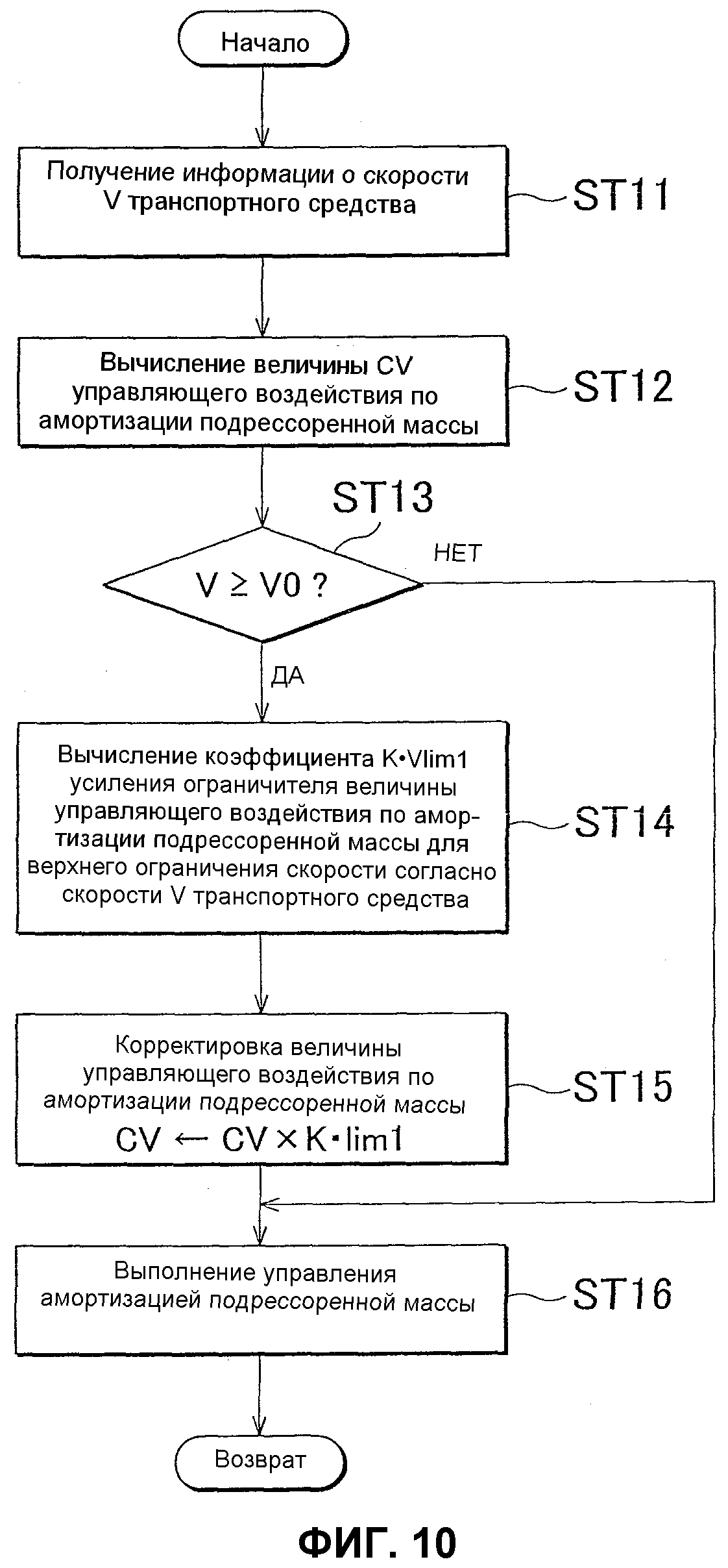
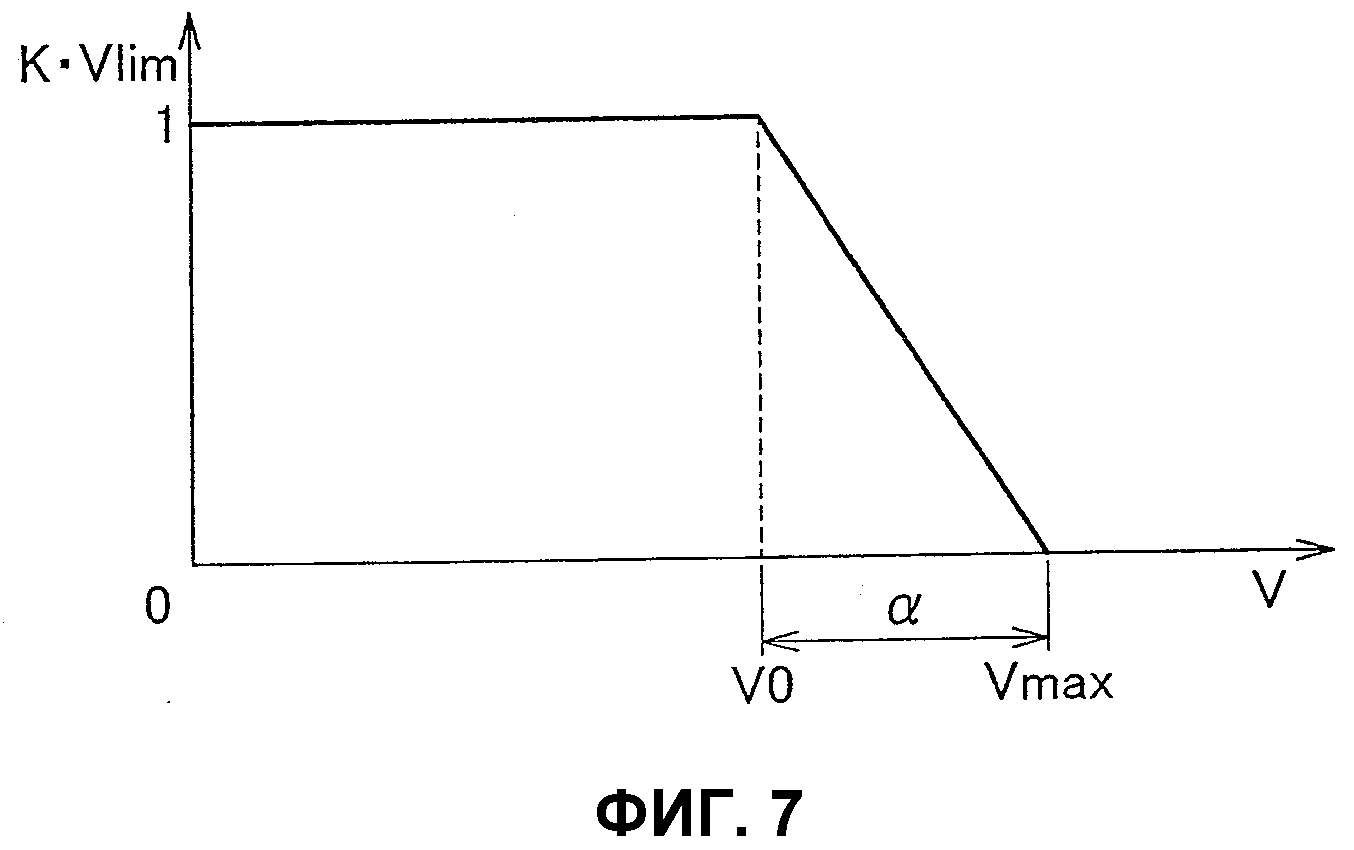
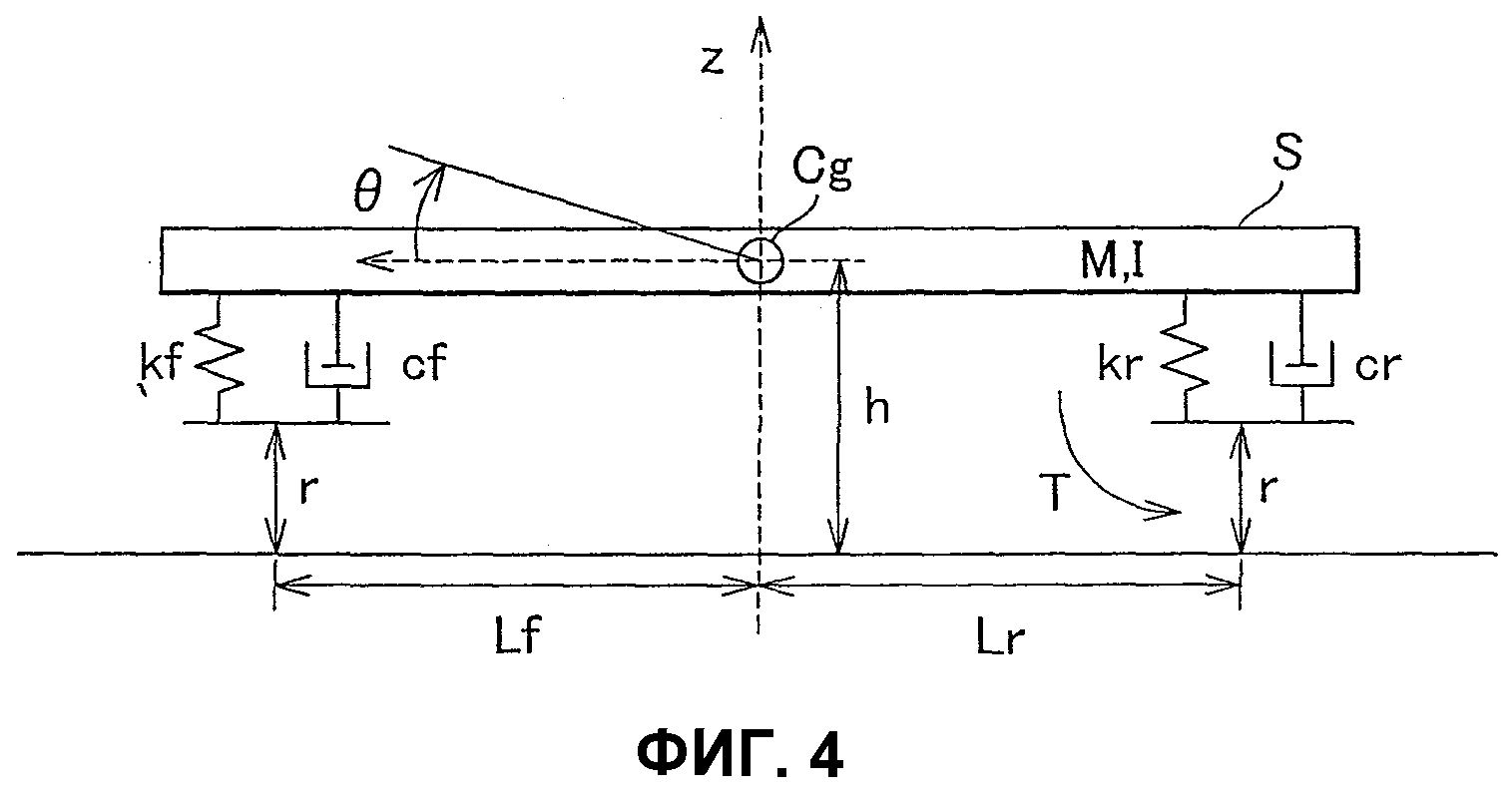
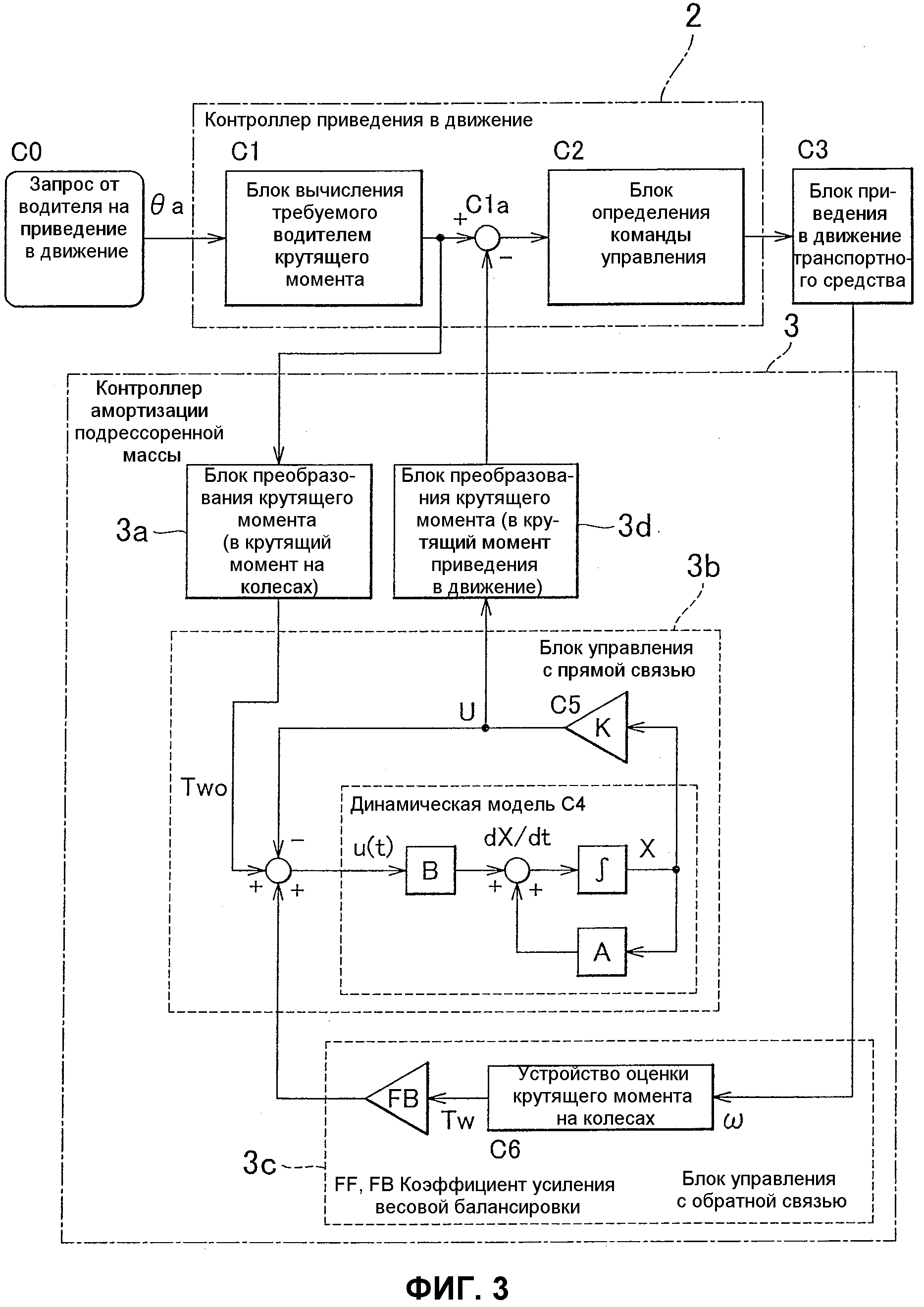
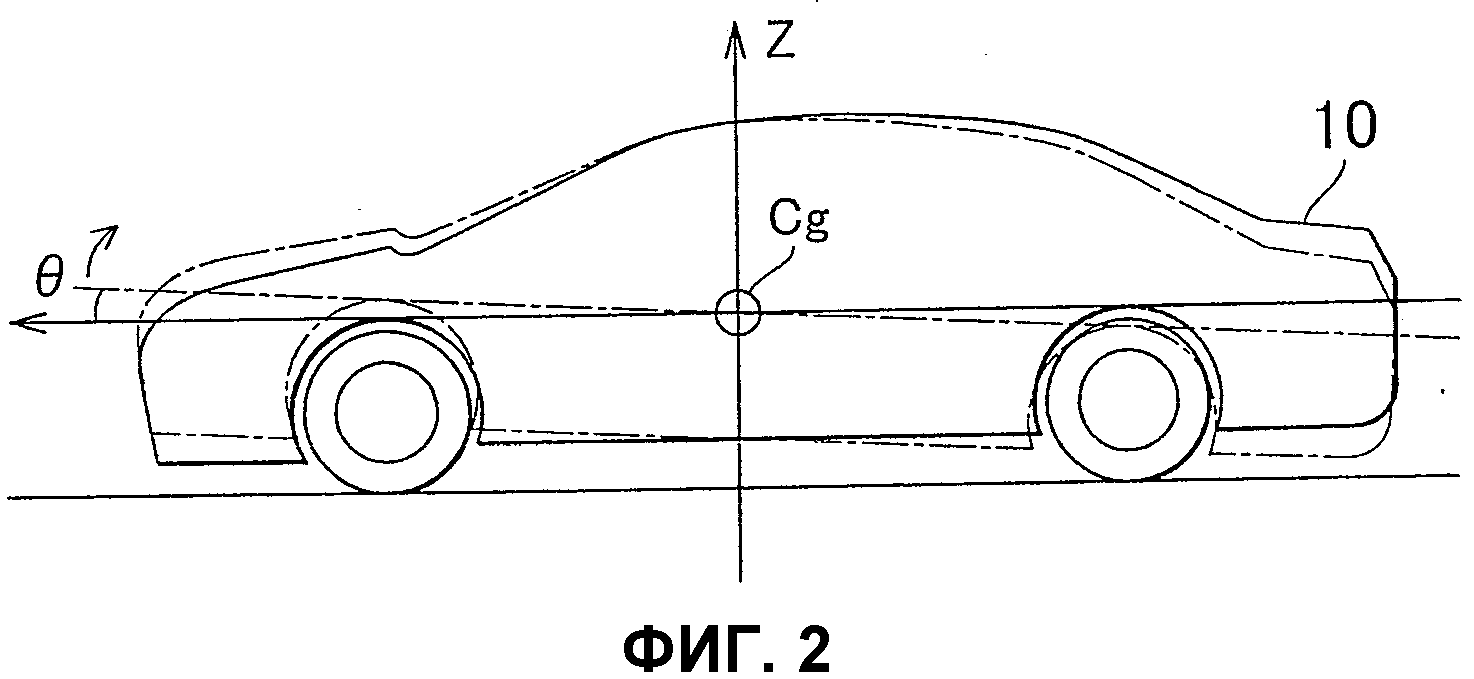
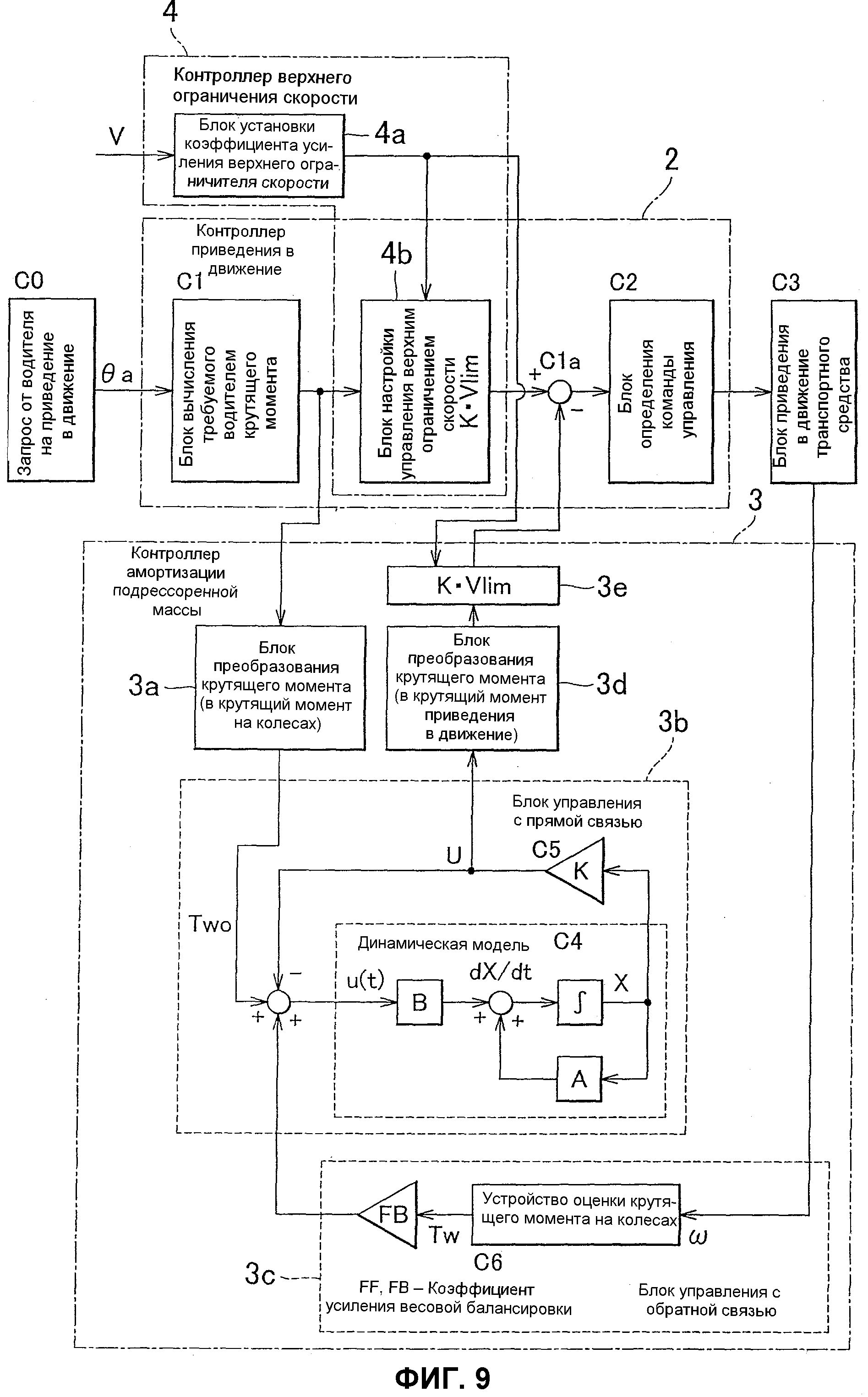
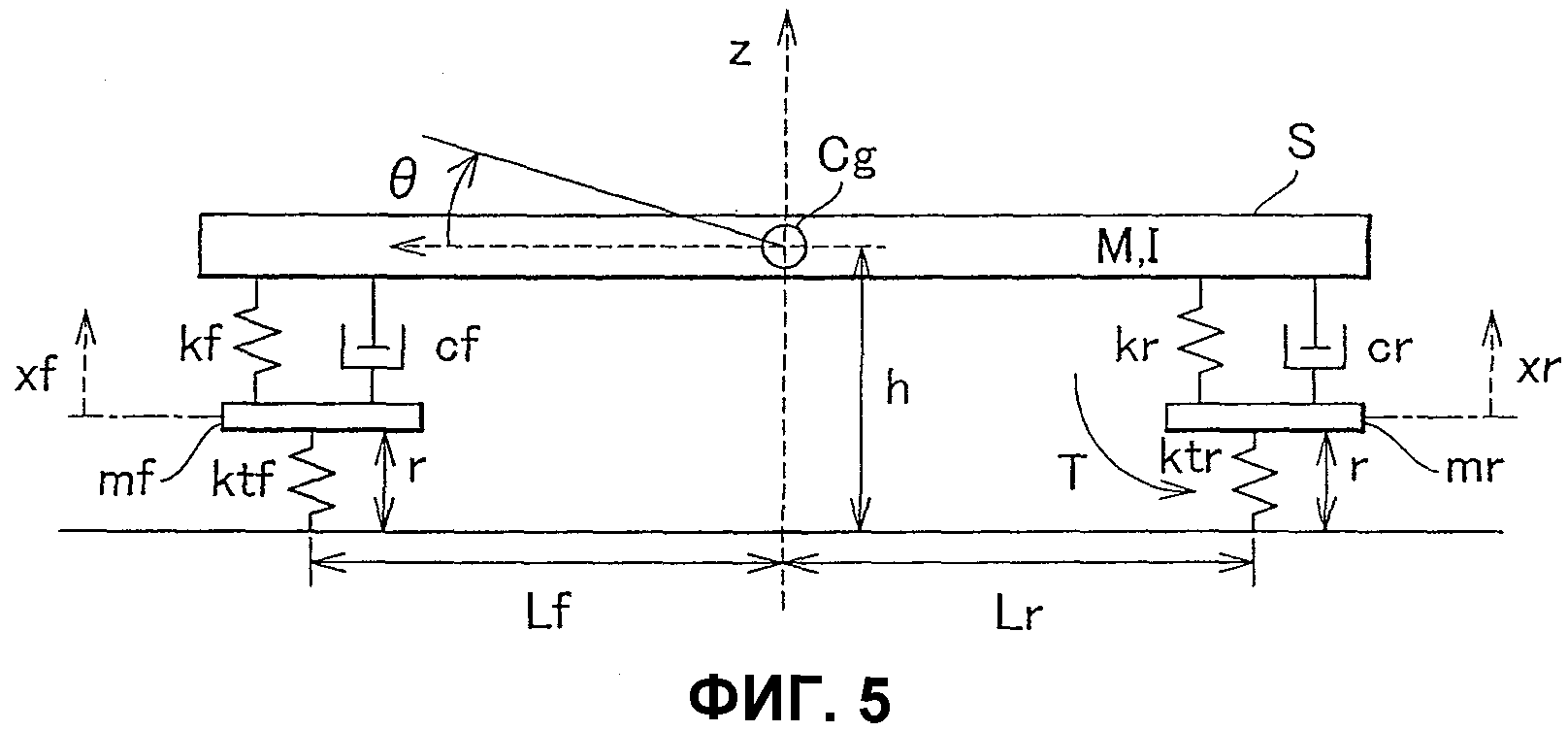
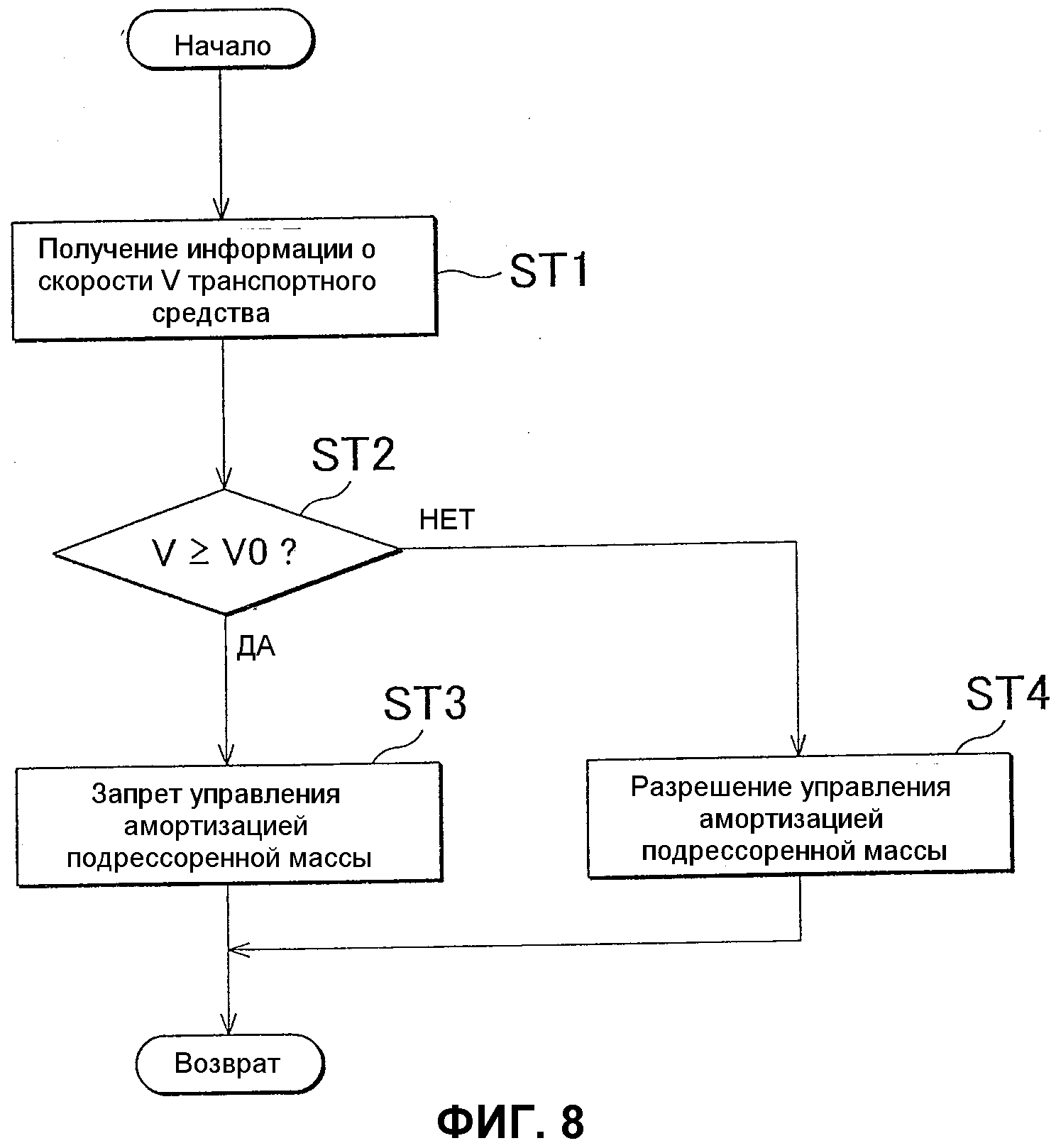
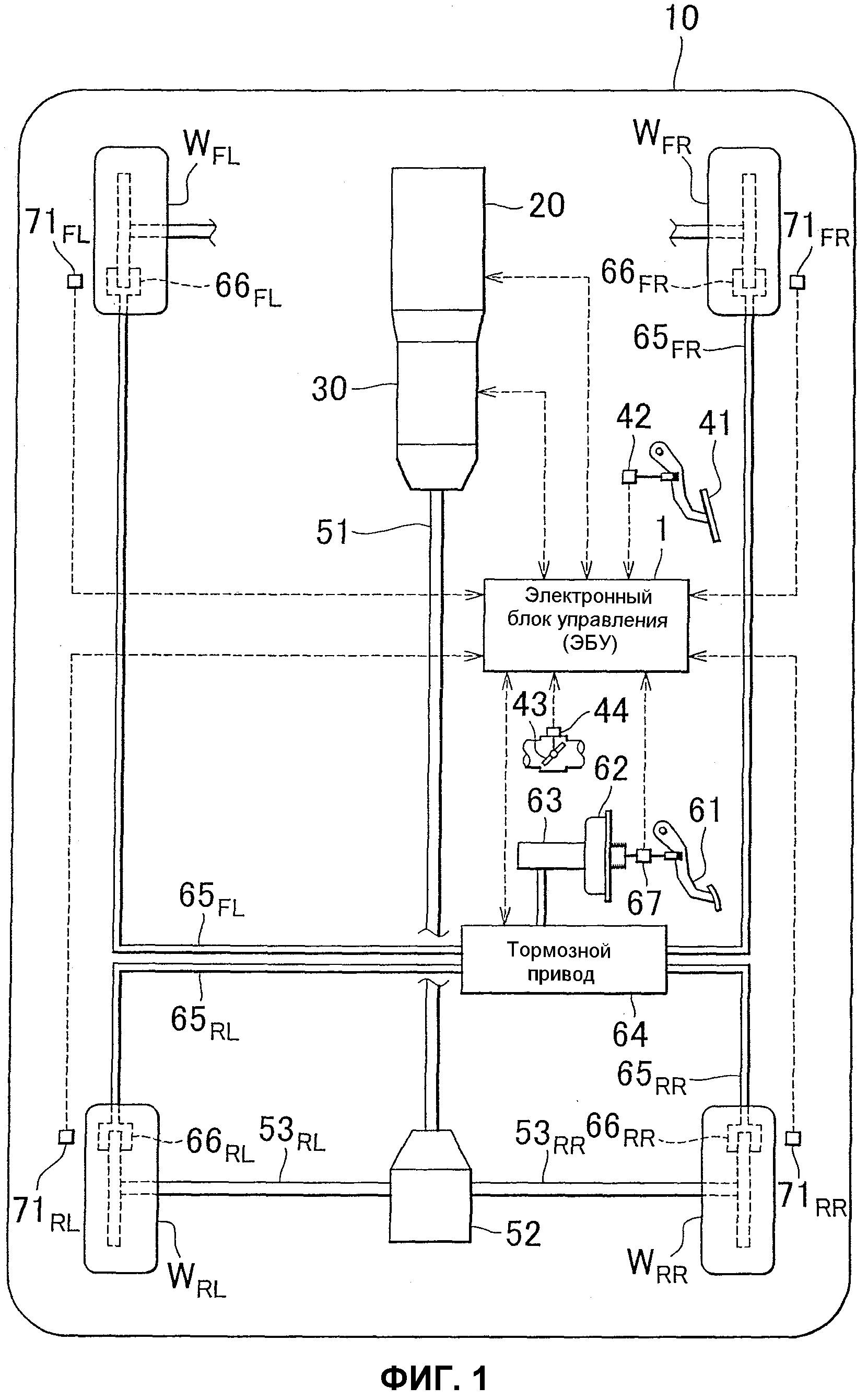
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство управления разрядкой для вторичной батареи
Устройство дифференциала
Устройство для очистки выхлопного газа двигателя внутреннего сгорания
Устройство управления амортизацией колебаний в транспортном средстве и транспортное средство, оснащенное устройством управления амортизацией колебаний
Контроллер для двигателя внутреннего сгорания
Система очистки выхлопных газов двигателя внутреннего сгорания
Устройство регулирования теплообмена транспортного средства
Гибридное транспортное средство
Тормозное устройство транспортного средства, подавляющее чрезмерное скольжение колеса в ходе торможения
Система очистки выхлопных газов двигателя внутреннего сгорания

