Результат интеллектуальной деятельности: СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ
Вид РИД
Изобретение
Изобретение касается совершенствования систем воздушных сигналов в части точности измерения в области больших высот и скоростей полета летательных аппаратов.
Известны системы измерения воздушных параметров, описанные, например, в [1] (стр.341-356) и [2] (стр.355-374), в основе которых положено восприятие давления полного торможения и статического давления невозмущенного потока, а также температуры торможения. Такие системы в настоящее время установлены на всех классах летательных аппаратов.
Для проектируемых в настоящее время высотных сверхзвуковых и гиперзвуковых летательных аппаратов традиционные системы воздушных сигналов могут оказаться непригодными в силу недостаточной точности измерения.
Основанием к этому является неточность восприятия и измерения статического давления, так как с увеличением высоты погрешность восприятия и измерения приближается к измеряемой величине. Это накладывает соответствующие ограничения применимости известных систем воздушных сигналов по высотности.
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является расширение возможностей точного измерения систем воздушных сигналов в более широком диапазоне высот и скоростей полета.
Технический результат заключается в том, что в предлагаемой системе используется статистическая связь между статическим давлением и температурой невозмущенного потока, которая установлена стандартными атмосферами ВСА-60 [4], ГОСТ 4401-64 [5] или ГОСТ 4401-73 [6]. На основе этой связи и известных соотношений, увязывающих параметры температур торможения и невозмущепного потока, давлений торможения и невозмущенного потока и числа М, определяется та же совокупность воздушных сигналов, что и у известных систем. Отличие состоит в том, что непосредственное восприятие статического давления невозмущенного потока при известном сочетании высоты и числа М исключается, но при этом также как и у известных систем используются данные о давлении и температуре торможения.
Сущность изобретения поясняется следующими чертежами.
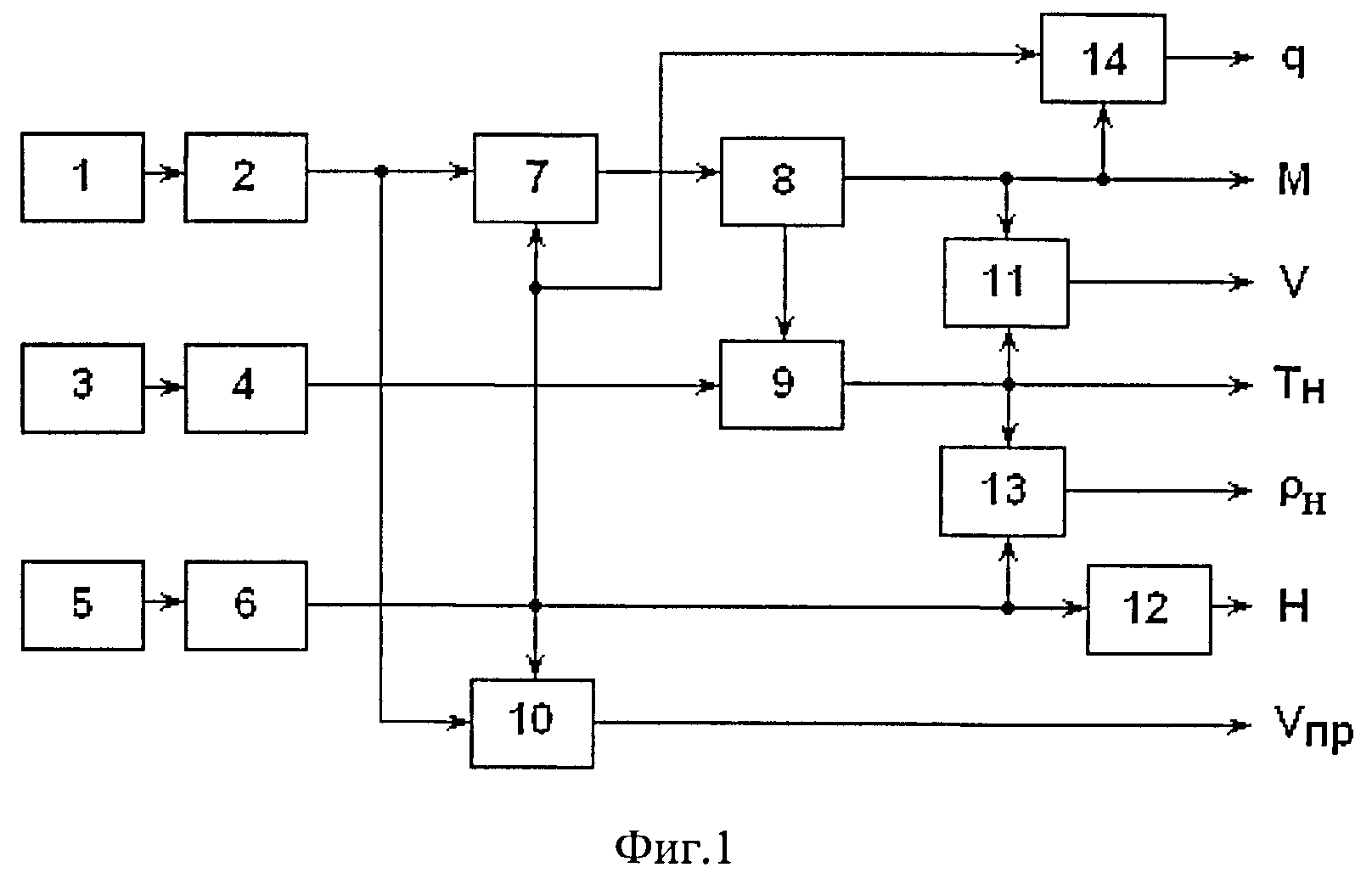
На фиг.1 представлена структурная схема известных систем воздушных сигналов, где
1 - приемник полного давления РП,
2 - датчик полного давления РП,
3 - приемник температуры торможения ТП,
4 - датчик температуры торможения ТП,
5 - приемник статического давления РН,
6 - датчик статического давления РН,
7 - первый преобразователь,
8 - второй преобразователь,
9 - третий преобразователь,
10 - четвертый преобразователь,
11 - пятый преобразователь,
12 - шестой преобразователь,
13 - седьмой преобразователь,
14 - восьмой преобразователь,
q - скоростной напор,
М - число Маха,
V - истинная воздушная скорость,
ТН - температура невозмущенного потока,
ρН - плотность воздуха,
Н - барометрическая высота,
Vпр - приборная скорость.
Приемник 1 и датчик 2 полного давления РП, приемник 3 и датчик 4 температуры торможения ТП, приемник 5 и датчик 6 статического давления РН функционально связаны с преобразователями. Первый преобразователь 7 подключен к датчикам полного 2 и статического 6 давления, второй преобразователь 8 подключен к первому преобразователю 7, третий преобразователь 9 подключен к датчику температуры торможения 4 и второму преобразователю 8, четвертый преобразователь 10 подключен к датчикам полного 2 и статического 6 давления, пятый преобразователь 11 подключен ко второму 8 и третьему 9 преобразователям, шестой преобразователь 12 подключен к датчику статического давления 6, седьмой преобразователь 13 подключен к датчику статического давления 6 и третьему преобразователю 9, восьмой преобразователь 14 подключен к датчику статического давления 6 и второму преобразователю 8.
На фиг.2 представлена структурная схема предлагаемой системы воздушных сигналов.
1 - приемник полного давления РП,
2 - датчик полного давления РП,
3 - приемник температуры торможения ТП,
4 - датчик температуры торможения ТП,
5 - приемник статического давления РН,
6 - датчик статического давления РН,
7 - первый преобразователь,
8 - второй преобразователь,
9 - третий преобразователь,
10 - четвертый преобразователь,
11 - пятый преобразователь,
12 - шестой преобразователь,
13 - седьмой преобразователь,
14 - восьмой преобразователь,
15 - девятый преобразователь,
16 - десятый преобразователь,
17 - одиннадцатый преобразователь,
18 - двенадцатый, преобразователь,
19 - тринадцатый преобразователь,
20 - четырнадцатый преобразователь,
21 - пятнадцатый - преобразователь,
22 - шестнадцатый преобразователь,
23 - семнадцатый преобразователь,
24 - восемнадцатый преобразователь.
q - скоростной напор,
М - число Маха,
V - истинная воздушная скорость,
ТН - температура невозмущенного потока,
ρН - плотность воздуха,
Н - барометрическая высота,
Vпр - приборная скорость.
Приемник 1 и датчик 2 полного давления РП, приемник 3 и датчик 4 температуры торможения ТП, приемник 5 и датчик 6 статического давления РН функционально связаны с преобразователями. Первый преобразователь 7 подключен к датчикам полного 2 и статического 6 давления, второй преобразователь 8 подключен к первому преобразователю 7, третий преобразователь 9 подключен к датчику температуры торможения 4 и второму преобразователю 8, четвертый преобразователь 10 подключен к датчикам полного 2 и статического 6 давления, пятый преобразователь 11 подключен ко второму 8 и третьему 9 преобразователям, шестой преобразователь 12 подключен к датчику статического давления 6, седьмой преобразователь 13 подключен к датчику статического давления 6 и третьему преобразователю 9, восьмой преобразователь 14 к датчику статического давления 6 и второму преобразователю 8, девятый преобразователь 15 подключен к датчику полного давления 2 и десятому преобразователю 16, одиннадцатый преобразователь 17 подключен к датчику температуры торможения 4 и двенадцатому преобразователю 18, который подключен к девятому преобразователю 15, тринадцатый преобразователь 19 подключен к десятому преобразователю 16, четырнадцатый преобразователь 20 подключен к девятому преобразователю 15, пятнадцатый преобразователь 21 подключен к девятому 15 и двенадцатому 18 преобразователям, шестнадцатый преобразователь 22 подключен к двенадцатому 18 и тринадцатому 19 преобразователям, семнадцатый преобразователь 23 подключен к датчику полного давления 2 и девятому преобразователю 15, восемнадцатый преобразователь 24 подключен к тринадцатому 19 и девятому 15 преобразователям, при чем на выходах тринадцатого 19, четырнадцатого 20, пятнадцатого 21, шестнадцатого 22, семнадцатого 23, восемнадцатого 24 и двенадцатого 18 преобразователей формируются соответственно число М, барометрическая высота Н, плотность ρН, истинная воздушная скорость V, приборная скорость Vпр, скоростной напор q и температура невозмущенного потока ТН.
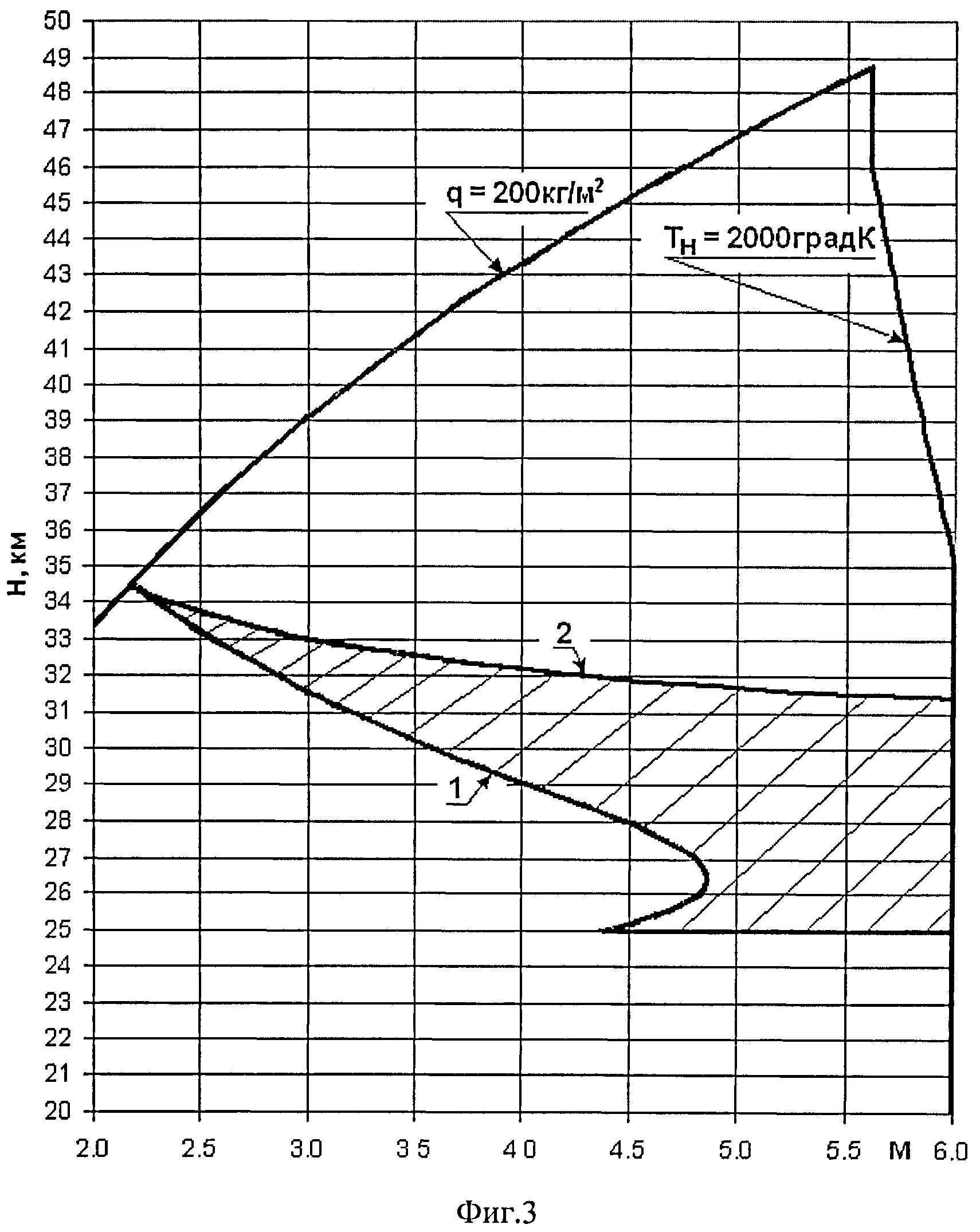
На фиг.3 в координатах высота Н и число, М показаны границы применимости предлагаемой и известных систем воздушных сигналов. Там же показаны ограничения по минимальному скоростному напору qmin=200 кг/м2 и температуре торможения ТП=2000°К.
Как это следует из фиг.1 у известных систем воздушных параметров, основанных на восприятии и измерении параметров РП, ТП и РН, указанная совокупность выходных сигналов получается следующим образом:
В первом преобразователе 7 решается отношение  а во втором преобразователе 8 формируется число М, в третьем преобразователе 9 по числу М и температуре торможения ТП формируется температура невозмущенного потока как
а во втором преобразователе 8 формируется число М, в третьем преобразователе 9 по числу М и температуре торможения ТП формируется температура невозмущенного потока как  в четвертом преобразователе 10 на основе разности давлений РП и РН формируется значение приборной скорости Vпp, в пятом преобразователе 11 на основе числа М и температуры ТН формируется значение истинной воздушной скорости V
в четвертом преобразователе 10 на основе разности давлений РП и РН формируется значение приборной скорости Vпp, в пятом преобразователе 11 на основе числа М и температуры ТН формируется значение истинной воздушной скорости V
 С - постоянная,
С - постоянная,
в шестом преобразователе 12 на основе давления РН формируется барометрическая высота Н
Н=f(РН) на основе стандартной атмосферы, в седьмом преобразователе 13 на основе температуры ТН и давления РН формируется плотность ρН
 , R - газовая постоянная
, R - газовая постоянная
и наконец в восьмом преобразователе 14 на основе числа М и статического давления РН формируется значение скоростного напора q
 .
.
В предлагаемой системе воздушных сигналов на фиг.2 при определенном соотношении высоты и скорости одновременно с приемником 1 и датчиком 2 полного давления РП, приемником 3 и датчиком 4 температуры торможения ТП начинают функционировать преобразователи с девятого 15 по восемнадцатый 24.
Так в девятом преобразователе 15 на основе известной функции ψ(М) с десятого преобразователя 16 и давления торможения РП с датчика 2 формируется статическое давление РН, как
 , где
, где
 при М≥1.
при М≥1.
В двенадцатом преобразователе 18 на основе принятой модели атмосферы, устанавливающей связь ТН=f(РН), на выходе формируется температура невозмущенного потока ТН, в одиннадцатом преобразователе 17 на основе температуры торможения с датчика 4 и температуры ТН с двенадцатого преобразователя 18 формируется функция числа М, вида
являющаяся входной для десятого преобразователя 16, на выходе тринадцатого преобразователя 19 на основе значения функции ψ(М) с выхода десятого преобразователя 16 формируется число М, в четырнадцатом преобразователе 20 на основе давления РН с девятого преобразователя 15 формируется барометрическая высота H=f(РН), в пятнадцатом преобразователе 21 на основе давления РН и температуры ТН формируется плотность ρH
R - газовая постоянная,
в шестнадцатом преобразователе 22 на основе числа М и температуры ТН формируется истинная воздушная скорость
 С - постоянная,
С - постоянная,
в семнадцатом преобразователе 23 на основе давлений РП и РН, соответственно с датчика 2 и девятого преобразователя 15 формируется приборная скорость как
 ,
,
в восемнадцатом преобразователе 24 на основе числа М и давления РН с тринадцатого 19 и девятого 15 преобразователей формируется скоростной напор q
Для определения ориентировочных границ применимости известных систем воздушных сигналов, элементы которых обозначены на фиг.1 и фиг.2 с 1 по 14, и предлагаемой системы, элементы которой обозначены на фиг.2 с 1 по 4 и с 15 по 24, достаточно провести их сравнение по точности измерения.
Поскольку как известные фиг.1 так и предлагаемая структура системы фиг.2 используют информацию о давлении и температуре торможения, которые измеряются достаточно точно, то при анализе их погрешностями можно пренебречь.
Как было уже указано, основную долю погрешности в известных системах с увеличением высоты полета вносит погрешность восприятия и измерения статического давления невозмущенного потока РН.
Будем считать, что в известном диапазоне углов скоса потока суммарная ошибка восприятия давления РН, а также ошибка измерения РН датчиком давления не превышает 0.5 мм рт.ст. (66.5 Па), что составляет в пересчете на высоту Н на режимах взлета и посадки погрешность ΔН≈5.5 м.
Из [2] для сверхзвуковых скоростей М>1 погрешность измерения числа М от неточности измерения давления невозмущенного потока можно определить по формуле

где РН=f(Н) в мм рт.ст.
Методическую погрешность измерения числа М предложенной системы с элементами 1÷4 и 15÷24 на фиг.2 от возможных отклонений температуры невозмущенного потока ТН от стандартной ТНст в зависимости от высоты Н можно определить из соотношения
откуда
Для определения возможных отклонений ΔТН от стандартной температуры ТНст стандартной атмосферы для северного полушария, можно воспользоваться приложением 1 к «Таблице временной стандартной атмосферы» 1960 г. (ВСЛ-60) [3].
Величины отклонений ±ΔТН в зависимости от высоты Н определим согласно [3] в доверительном интервале 80% вероятности всех возможных значений температуры для всего северного полушария. Для анализа примем предельные значения отклонений температуры от стандартной.
Из соотношений δ1 и δ2 видно, что они являются функцией числа М и высоты Н.
Очевидно, что отношение равное единице
определит равноценность с точки зрения точности измерения числа М известной системы воздушных сигналов и предлагаемой системой, показанной на фиг.2 элементами, обозначенными 1-4 и 15-24. Указанное соотношение в координатах М и Н устанавливает ориентировочные границы использования существующих систем воздушных сигналов.
На фиг.3 приведены в координатах М и Н в диапазоне чисел М=2÷6 и высот Н=20÷50 км границы равной точности измерения известных систем воздушных сигналов и предложенной системы с элементами 1÷4 и 15÷24 на фиг.2.
В этих же координатах показаны ограничения по минимальному скоростному напору q=200 кг/м2 и температуре торможения ТП=2000°К.
Заштрихованная область на фиг.3 между зависимостью 1 и зависимостью 2, которые соответствуют положительным и отрицательным максимальным отклонениям температуры ТН от стандартной ТНст принятой модели атмосферы соответствует равной точности измерения известных систем воздушных сигналов и предложенной со структурой элементов 1÷4 и 15÷24 фиг.2.
Ниже этой области преимущества по точности измерения имеют известные системы, а выше - предложенная структура системы с элементами 1÷4 и 15÷24 на фиг.2. В заштрихованной области на фиг.3 предлагаемая система воздушных сигналов обладает дублированной информацией по выходным сигналам равноценной точности измерения, что расширяет в целом ее функциональные возможности в части контроля работоспособности предложенной системы. В целом же предложенная система существенно расширяет границы точного измерения воздушных сигналов до высот порядка 50 км.
Необходимо подчеркнуть здесь, что при данном сравнении принята модель атмосферы и связь РН=f(ТН), которая реализуется на фиг.2 в девятом преобразователе 15 для всего северного полушария по много годичным наблюдениям и отклонениям температуры от стандартной. Однако, если учитывать широтные и сезонные наблюдения (зима, лето…), то следует ожидать, что модели атмосферы могут быть другими и иметь меньшие предельные отклонения ТН от стандартной, что может повысить точность измерения предложенной системы с элементами 1÷4 и 15÷24. В этой связи двенадцатый преобразователь 18 на фиг.2 может содержать несколько моделей, учитывающих как сезонные, так и широтные наблюдения.
Как видно из фиг.3, заштрихованная область лежит между двумя кривыми 1 и 2, которые могут быть описаны функциями граничных значений МГ1=f1(H) и МГ2=f2(H).
Располагая этими зависимостями, функционирование системы в целом может осуществляться следующим образом. Известная система воздушных сигналов с элементами 1÷14 на фиг.1 и фиг.2 измеряет высоту Н и число М, одновременно сравнивая вычисленное значение числа М с граничным МГ. При М<МГ1 информацию известных систем воздушных сигналов следует считать более предпочтительной. При М≥МГ1 и М≤МГ2 известные системы с элементами 1-14 и система воздушных сигналов с элементами 1÷4 и 15÷24 следует считать равнозначными по точности измерения.
При М>МГ2 предложенную структуру на фиг.2 с элементами 1÷4 и 15÷24 следует считать более предпочтительной по сравнению с известными системами с элементами 1÷14. При положении летательного аппарата в заштрихованной области на фиг.3 предложенная система воздушных сигналов располагает дублированной информацией о выходных сигналах, равноценной по точности измерения, что позволяет осуществлять контроль ее работоспособности в этих переходных режимах.
Таким образом, предложенная структура системы воздушных сигналов на фиг.2 существенно расширяет область ее использования до высот порядка 50 км и чисел М=2÷6.
Источники информации
1. Д.А. Браславский и др. «Авиационные приборы» Машиностроение. М., 1964 г.
2. В.А. Боднер «Авиационные приборы» Машиностроение. М., 1969 г.
3. Приложение 1 к «Таблице временной стандартной атмосферы» 1960 г. (ВСА-60)
4. «Таблица временной стандартной атмосферы» 1960 г. (ВСА-60).
5. ГОСТ 4401-64.
6. ГОСТ 4401-73.
Система воздушных сигналов, содержащая приемники и датчики полного и статического давления и температуры торможения, а также преобразователи параметров, первый из которых подключен к датчикам полного и статического давления, второй преобразователь подключен к первому преобразователю, третий преобразователь подключен к датчику температуры торможения и второму преобразователю, четвертый преобразователь подключен к датчикам полного и статического давления, пятый преобразователь подключен ко второму и третьему преобразователям, шестой преобразователь подключен к датчику статического давления, седьмой преобразователь подключен к датчику статического давления и третьему преобразователю, восьмой преобразователь подключен к датчику статического давления и второму преобразователю, при этом на выходах второго, третьего, четвертого, пятого, шестого, седьмого и восьмого преобразователей формируются соответственно число М, температура невозмущенного потока, приборная скорость, истинная воздушная скорость, барометрическая высота, плотность и скоростной напор, отличающаяся тем, что в нее введены дополнительно десять преобразователей с девятого по восемнадцатый, при этом девятый преобразователь подключен к датчику полного давления и десятому преобразователю, одиннадцатый преобразователь подключен к датчику температуры торможения и двенадцатому преобразователю, который подключен к девятому преобразователю, тринадцатый преобразователь подключен к десятому преобразователю, четырнадцатый преобразователь подключен к девятому преобразователю, пятнадцатый преобразователь подключен к девятому и двенадцатому преобразователям, шестнадцатый преобразователь подключен к двенадцатому и тринадцатому преобразователям, семнадцатый преобразователь подключен к датчику полного давления и девятому преобразователю, восемнадцатый преобразователь подключен к тринадцатому и девятому преобразователям, причем на выходах тринадцатого, четырнадцатого, пятнадцатого, шестнадцатого, семнадцатого, восемнадцатого и двенадцатого преобразователей формируются соответственно число М, барометрическая высота, плотность, истинная воздушная скорость, приборная скорость, скоростной напор и температура невозмущенного потока.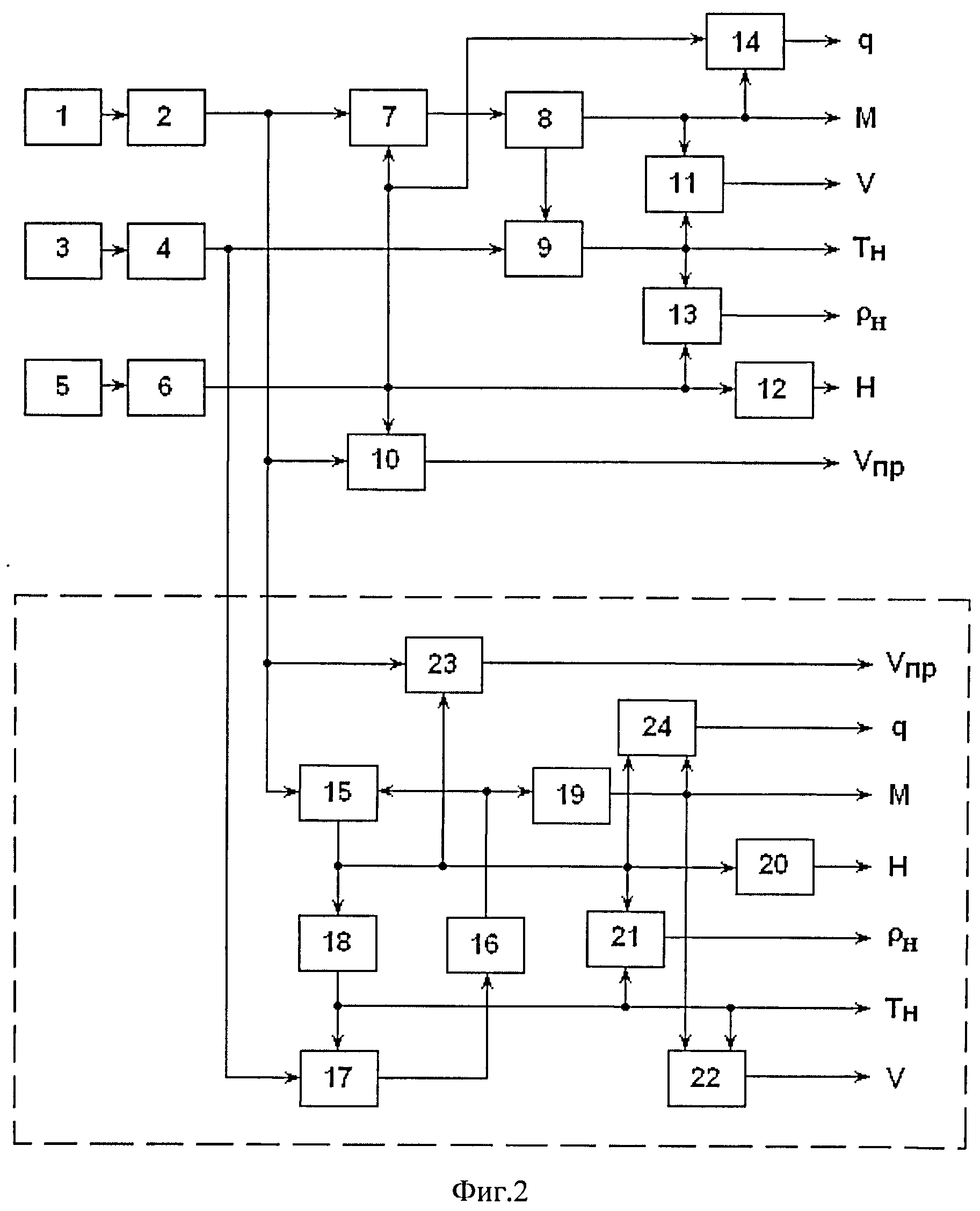
Меточный датчик аэродинамического угла и истинной воздушной скорости
Меточный датчик аэродинамического угла и истинной воздушной скорости
Интегрированный комплекс бортового оборудования разнородной архитектуры
Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета
Комплекс бортового оборудования вертолета на основе интегрированной модульной авионики
Устройство управления системой кондиционирования воздуха летательного аппарата
Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения
Самолет с системой управления общесамолетным оборудованием
Меточный датчик аэродинамического угла и истинной воздушной скорости
Интегрированный комплекс бортового оборудования разнородной архитектуры
Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета
Комплекс бортового оборудования вертолета на основе интегрированной модульной авионики
Устройство управления системой кондиционирования воздуха летательного аппарата
Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения
Комплекс бортового оборудования вертолета
Устройство для ограничения угла атаки самолета
Авиационный многофункциональный индикатор
Интегрированная система резервных приборов для самолетов и вертолетов

