Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ
Вид РИД
Изобретение
Изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению.
Известен способ автоматического управления движением судна по заданному курсовому углу, реализованный в «Системе автоматического управления движением судна» (патент России №2248914, БИ №9, март 2005 г.). Способ управления движением судна основан на использовании информации от приемника спутниковой навигационной системы, задатчика путевого угла, и регулятора-сумматора, в котором по сигналам: текущего путевого угла, заданного курсового угла, угловой скорости судна формируется результирующий сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением корабля с использованием динамической модели углового движения корабля (см. патент RU №2223197, БИ №4, 2004 г., принятый нами в качестве прототипа). Аппаратура автоматического управления движением судна, содержащая задатчик курсового угла, датчик угла перекладки руля, приемник спутниковой навигационной системы, рулевой привод, дифференциатор и сумматор, первый вход которого соединен с выходом задатчика курсового угла, выход приемника СНС соединен с вторым входом сумматора, к третьему входу которого подключен выход датчика угла перекладки руля, выход сумматора соединен с входом рулевого привода, четвертый вход сумматора соединен с выходом динамической модели углового движения судна. На выходе динамической модели движения судна формируется оценка угла курса. Сигнал оценки угла курса алгебраически суммируется с сигналом угла курса, с выхода приемника СНС. Разность этих сигналов вводится на вход динамической модели движения судна.
Таким образом, в широко распространенном способе управления движения судна, формируются следующие сигналы для обеспечения автоматического управления движением судна.
В задатчике курсового угла формируется сигнал заданного угла курса - ϕзд.=f(t), который вводится на вход сумматора, на второй вход которого поступает сигнал оценки угла курса -  . Сигнал оценки
. Сигнал оценки  вводится с выхода электронной (динамической) модели движения судна. Для формирования сигнала оценки угла курса на вход электронной модели движения корабля вводится сигнал угла перекладки руля - δ от датчика рулевого привода, сигнал измеренного угла курса - ϕ и сигнал оценки угла курса -
вводится с выхода электронной (динамической) модели движения судна. Для формирования сигнала оценки угла курса на вход электронной модели движения корабля вводится сигнал угла перекладки руля - δ от датчика рулевого привода, сигнал измеренного угла курса - ϕ и сигнал оценки угла курса -  (с выхода электронной модели движения корабля) в виде невязки -
(с выхода электронной модели движения корабля) в виде невязки -  .
.
Таким образом на выходе сумматора-регулятора формируется сигнал заданного значения угла перекладки руля - δзд.:
 .
.
где
ϕзд. - сигнал заданного курса, с задатчика курсового угла,
 - сигнал оценки угла курса, с выхода электронной модели движения судна,
- сигнал оценки угла курса, с выхода электронной модели движения судна,
δзд. - сигнал заданного значения угла перекладки руля (с выхода сумматора вводится на вход рулевого привода).
Недостатками известных способов управления движением являются:
- при появлении медленно меняющихся внешних возмущений, воздействующих на судно в процессе плавания, формируется смещение (ошибка) в управлении судном по курсу,
- сложность прохождения судном в автоматическом режиме управления узкостей и возможных преград.
Приведенный ниже способ управления лишен этих недостатков.
Техническим результатом предлагаемого способа управления движением судна является:
- восстановление (выработка в блоке интегрирования оценок) медленно меняющихся внешних возмущений по силе - Р и моменту - М, воздействующих на судно в процессе плавания,
- введение сигнала восстановленных внешних возмущений по Р и М в систему автоматического управления движением корабля, что позволило повысить точность управления движения судна по заданной траектории(исключить смещение (ошибку) по углу курса при наличии медленно меняющихся внешних возмущений).
Технический результат достигается при использовании:
- интегратора, на выходе которого формируется сигнал пропорциональный внешним возмущениям, действующим на корабль,
- сигнала курсового угла - ϕ и оценки курсового угла  (для формирования невязки -
(для формирования невязки -  , которую подключают к входу интегратора,
, которую подключают к входу интегратора,
- сигнала, сформированного на выходе интегратора -  , вводимого в регулятор-сумматор.
, вводимого в регулятор-сумматор.
Рассмотрим, как формируется управление с использованием предложенного способа.
Предлагаемый способ управления использует:
задатчик курсового угла - ϕзд., приемник спутниковой навигационной системы (СНС), рулевой привод, электронную модель движения судна, рулевой привод и регулятор-сумматор.
В задатчике курсового угла сформирован сигнал - ϕзд.=f(t), который поступает на вход регулятора-сумматора, на второй вход которого поступает сигнал оценки угла курса -  . Сигнал оценки -
. Сигнал оценки -  формируется на выходе электронной модели движения судна. Для формирования оценки сигнала угла курса на вход электронной модели движения судна вводится сигнал угла перекладки руля δ от датчика рулевого привода, и сигнал невязки-
формируется на выходе электронной модели движения судна. Для формирования оценки сигнала угла курса на вход электронной модели движения судна вводится сигнал угла перекладки руля δ от датчика рулевого привода, и сигнал невязки- (К - вычисляется с использованием метода Калмановской фильтрации, формируемой с использованием оценки сигнала угла курса
(К - вычисляется с использованием метода Калмановской фильтрации, формируемой с использованием оценки сигнала угла курса  - с выхода электронной модели движения судна и сигнала угла курса ϕ - с выхода приемника СНС. Таким образом на выходе регулятора-сумматора формируется сигнал заданного значения угла перекладки руля - δзд.:
- с выхода электронной модели движения судна и сигнала угла курса ϕ - с выхода приемника СНС. Таким образом на выходе регулятора-сумматора формируется сигнал заданного значения угла перекладки руля - δзд.:
 .
.
где
ϕзд. - заданный курс, с задатчика курсового угла,
 - сигнал оценки угла курса, с выхода электронной модели движения судна,
- сигнал оценки угла курса, с выхода электронной модели движения судна,
δзд. - сигнал с выхода регулятора-сумматора,
 - сигнал невязки, (эта невязка вводится также на вход электронной модели движения судна для формирования на выходе оценка угла курса
- сигнал невязки, (эта невязка вводится также на вход электронной модели движения судна для формирования на выходе оценка угла курса  ),
),
 - сигнал дифференцирования формируется в регуляторе-сумматоре.
- сигнал дифференцирования формируется в регуляторе-сумматоре.
Для повышения точности автоматического управления движением судна используют интегратор, на вход которого вводится сигнал невязки -  .
.
Сигнал, сформированный на выходе интегратора -  вводят на вход регулятора-сумматора. (Ки - формируется по методу Калмана.)
вводят на вход регулятора-сумматора. (Ки - формируется по методу Калмана.)
При этом закон управления рулевым приводом (1) изменится и примет вид (1а):
 .
.
Сигнал δзд. с выхода регулятора-сумматора (в соответствии с зависимостью (1а) вводят на вход рулевого привода.
Сформированное автоматическое управление движением - (1а) позволит исключить смещение (ошибку) при движении по заданному углу курса - ϕзд. (в случае наличия медленно меняющихся внешних возмущений).
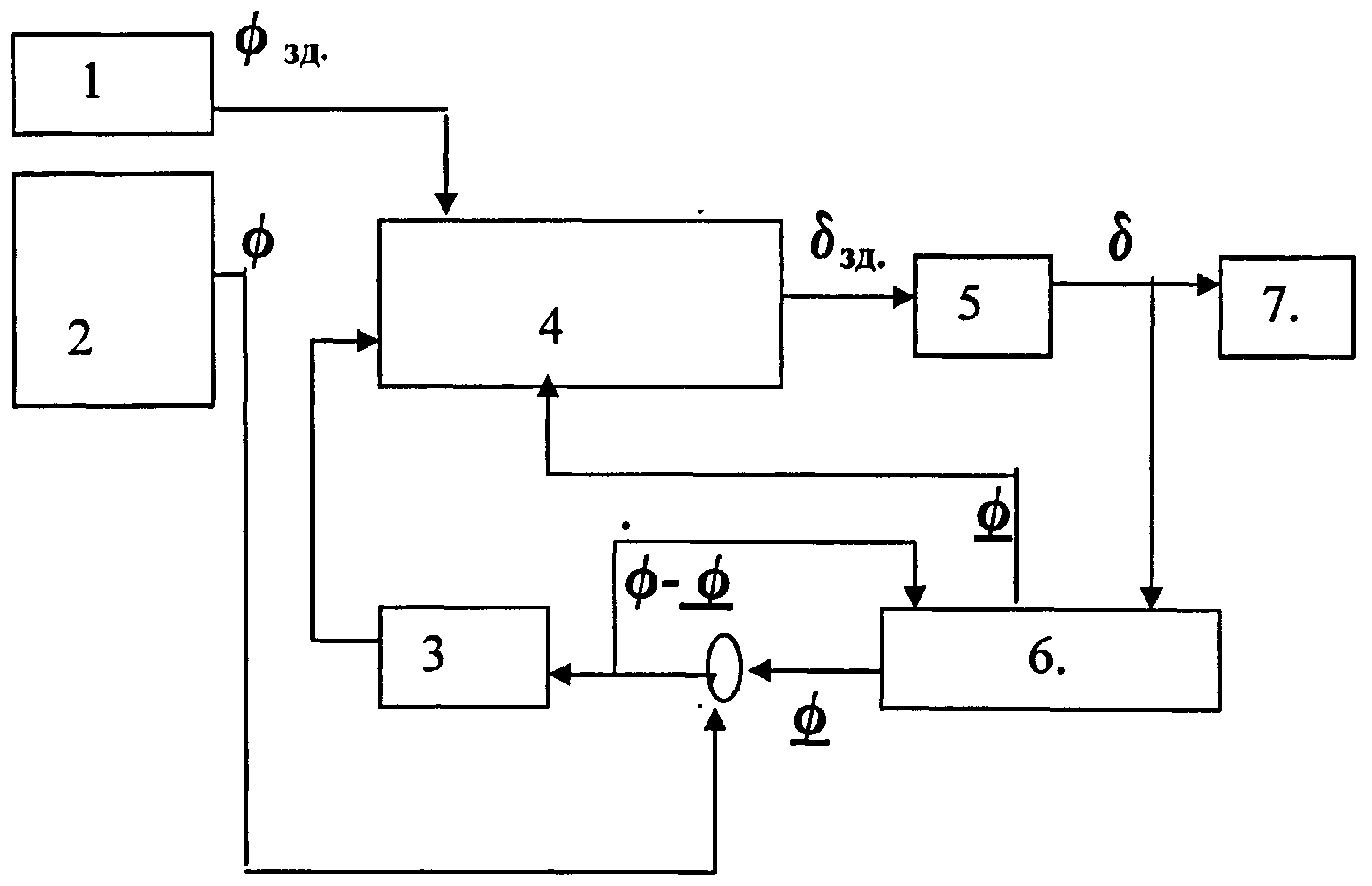
Рассмотрим вариант системы автоматического управления движением судна (в котором реализован предлагаемый способ управления).
На чертеже приведена блок-схема системы управления движением судна, в которой устраняются ошибки в автоматическом управлении движением по заданному курсу ϕзд. при появлении медленно меняющихся внешних возмущений вида (описываемых, см. литературу в приложении, к материалам изобретения [1]):
dР/dt=ξр,  .
.
где ξ, ξм - случайный сигнал, характеризующий изменение в медленно меняющемся входном возмущении.
Ошибка в управлении движением судна от воздействия медленно меняющихся возмущающих сил - Р и моментов - М вида (2) устраняется благодаря введению в закон управления (1) дополнительного сигнала вида-  с выхода интегратора - 3 (т.е. переходу от закона (1) к закону управления (1а)).
с выхода интегратора - 3 (т.е. переходу от закона (1) к закону управления (1а)).
Система содержит 1 - задатчик курсового угла - ϕзд., 2 - приемник спутниковой навигационной системы (СНС), 3 - интегратор, 4 - регулятор-сумматор, 5 - рулевой привод, 6 - электронную модель движения судна, 7 - объект управления - судно.
Реализовать рассматриваемую систему можно как с использованием цифровой элементной базы, так и аналоговой. При использовании аналоговой элементной базы можно применить усилители типа УД-6 и УД-8 (Блоки 1, 4, 7). Интегратор - 3 выбирается с чувствительностью не ниже 0.03° курса. Блоки 2,5 - это штатные (корабельные) устройства.
Рассмотрим работу системы автоматического управления движением судна.
В задатчике курсового угла - 1 сформирован сигнал- ϕзд.=f (t), который вводится на вход регулятора-сумматора - 4, на второй вход которого поступает сигнал оценки текущего угла курса -  . Сигнал оценки -
. Сигнал оценки -  вводится с выхода электронной модели движения судна - 6. Для формирования оценки угла курса на вход электронной модели движения корабля - 6 вводится сигнал угла перекладки руля - δ - от датчика рулевого привода - 5, и сигнал невязки -
вводится с выхода электронной модели движения судна - 6. Для формирования оценки угла курса на вход электронной модели движения корабля - 6 вводится сигнал угла перекладки руля - δ - от датчика рулевого привода - 5, и сигнал невязки -  (крутизна сигнала вычисляется с использованием метода Калмановской фильтрации, формируемой сигналом -
(крутизна сигнала вычисляется с использованием метода Калмановской фильтрации, формируемой сигналом -  с выхода электронной модели движения судна - 6 и сигналом - ϕ с выхода приемника СНС-2.
с выхода электронной модели движения судна - 6 и сигналом - ϕ с выхода приемника СНС-2.
При этом на выходе регулятора-сумматора - 4 формируется сигнал заданного значения угла перекладки руля - δзд.:
 .
.
где
 - оценка угла курса (с выхода электронной модели движения судна - 6),
- оценка угла курса (с выхода электронной модели движения судна - 6),
ϕзд. - заданный угол курса (с выхода задатчика курса - 1).
Закон (1) получил широкое распространение, однако при появлении внешних возмущений (волнение, ветер) движение судна осуществляется с ошибкой по курсу. Для компенсации воздействия на судно медленно меняющихся внешних возмущений, в соответствии с предложенным способом, закон (1) дополняется сигналом с выхода интеграла - 3, на вход которого вводится сигнал невязки  :
:

где ϕ - сигнал угла курса (поступающий с выхода приемника СНС-2), сигнал ϕ алгебраически суммируется с сигналом оценки угла курса -  (вырабатываемой на выходе электронной модели движения судна - 6) для формирования сигнала невязки -
(вырабатываемой на выходе электронной модели движения судна - 6) для формирования сигнала невязки -  ,
,
К2d/dtϕ - сигнал, формируемый в блоке суммирования - 4.
(вводится в случае управления среднетоннажными судами),  - сигнал, пропорциональный оценке возмущающего воздействия на судно по силе - Р и моменту - М.
- сигнал, пропорциональный оценке возмущающего воздействия на судно по силе - Р и моменту - М.
Сигнал
- формируется в интеграторе - 3, на вход которого вводится сигнал невязки  (ϕ - из приемника СНС-2 и сигнал
(ϕ - из приемника СНС-2 и сигнал  - из электронной модели движения судна - 6, Ки (вычисляется по методу Калмановской фильтрации)). Сигнал δзд. с выхода регулятора-сумматора - 4 вводят на вход рулевого привода - 5. При этом судно будет двигаться по курсу, равному заданному значению: ϕ=ϕзд. без смещения по курсу при наличии медленно меняющихся внешних возмущений, что особенно важно при прохождении узкостей.
- из электронной модели движения судна - 6, Ки (вычисляется по методу Калмановской фильтрации)). Сигнал δзд. с выхода регулятора-сумматора - 4 вводят на вход рулевого привода - 5. При этом судно будет двигаться по курсу, равному заданному значению: ϕ=ϕзд. без смещения по курсу при наличии медленно меняющихся внешних возмущений, что особенно важно при прохождении узкостей.
Методы построения системы автоматического управления движением корабля с использованием предложенного способа и результаты моделирования ее приведены в приложении к материалам заявки.
Способ управления движением судна с компенсацией медленно меняющихся внешних возмущений, характеризующийся тем, что использует: задатчик курсового угла, приемник спутниковой навигационной системы, рулевой привод, электронная модель движения судна и регулятор-сумматор, на входе которого формируют сигналы:- заданного угла курса - ϕ=f(t) из задатчика курсового угла,- оценку угла курса - с выхода электронной модели движения судна,- , производной от оценки угла курса, которая формируется в блоке - регулятора-сумматора; на входе электронной модели движения судна формируют:- сигнал угла перекладки руля δ от датчика рулевого привода,- сигнал невязки - , где: сигнал угла курса - ϕ - формируется с приемника спутниковой навигационной системы, а сигнал оценки угла курса - формируется с выхода электронной модели движения судна, отличающийся тем, что используется интегратор, на входе которого формируется сигнал невязки - , где: сигнал ϕ - с приемника спутниковой навигационной системы, а сигнал - с выхода электронной модели движения судна, сигнал с выхода интегратора - - вводится на вход регулятора-сумматора, при этом на выходе регулятора-сумматора формируется сигнал который вводится с выхода регулятора-сумматора на вход рулевого привода.








Устройство для измерения массы двухфазного вещества в замкнутом цилиндрическом резервуаре
Способ управления движением судна по широте и долготе
Способ получения гетероаннулярных 1,1'-бис-(диметилалкоксисилил)ферроценов
Устройство и способ автоматического управления движением судна по расписанию
Аэродинамическая труба
Устройство для утилизации энергии природного сжатого газа
Способ отказоустойчивого умерения крена судна на подводных крыльях
Отказоустойчивая система автоматического управления движением судна
Система идентификации гидродинамических коэффициентов математической модели движения судна
Система отказоустойчивого управления движением корабля
Устройство для измерения массы двухфазного вещества в замкнутом цилиндрическом резервуаре
Способ управления движением судна по широте и долготе
Способ получения гетероаннулярных 1,1'-бис-(диметилалкоксисилил)ферроценов
Устройство и способ автоматического управления движением судна по расписанию
Аэродинамическая труба
Устройство для утилизации энергии природного сжатого газа
Способ отказоустойчивого умерения крена судна на подводных крыльях
Отказоустойчивая система автоматического управления движением судна
Система идентификации гидродинамических коэффициентов математической модели движения судна
Система отказоустойчивого управления движением корабля

