Результат интеллектуальной деятельности: АКТИВИРОВАННЫЕ УСЛУГИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ
Вид РИД
Изобретение
ИСПРАШИВАНИЕ ПРИОРИТЕТА СОГЛАСНО $119 РАЗДЕЛА 35 СВОДА ЗАКОНОВ США
[0001] Настоящая заявка на патент испрашивает приоритет предварительной заявки на патент США № 61/151089, названной "Triggered Location Services," поданной 9 февраля 2009, переданной ее правопреемнику, и включенной в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее описание относится в целом к связи и, более конкретно, к способам для поддержки услуг определения местоположения.
УРОВЕНЬ ТЕХНИКИ
[0003] Часто желательно, и иногда необходимо, знать местоположение терминала в беспроводной сети. Термины "местоположение" и "позиция" синонимичны и используются в настоящем описании взаимозаменяемо. Например, пользователь может использовать терминал, чтобы просмотреть web-сайт и может осуществить щелчок на чувствительном к местоположению контенте. Местоположение терминала может затем быть определено и использоваться, чтобы предоставить соответствующий контент пользователю. Существует много других сценариев, в которых знание местоположения терминала полезно или необходимо.
[0004] Поток сообщений (который можно также назвать потоком или процедурой запросов) обычно выполняется, чтобы получить информацию местоположения (например, оценку местоположения) для терминала и послать информацию местоположения в клиентский объект. Различные сообщения обычно пересылаются между одним или более сетевыми объектами, терминалом и клиентским объектом во время потока сообщений. Эти сообщения гарантируют, что каждый объект снабжен соответствующей информацией, или может получить эту информацию из другого объекта, чтобы выполнить позиционирование для терминала и/или доставить информацию местоположения клиентскому объекту. Однако, эти сообщения добавляются к трафику в различных сетевых объектах. Дополнительный трафик может быть особенно большим для услуг определения местоположения, в которых информация местоположения может периодически предоставляться клиентскому объекту. Сообщения могут также увеличивать время ответа для посылки информации местоположения в клиентский объект.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Способы для поддержки активированных услуг определения местоположения описаны ниже. Активированная услуга определения местоположения является услугой, в которой можно послать сообщение с информацией местоположения всякий раз, когда происходит событие активатора (запускающее событие). Событие активатора может быть определено различными способами для различных активированных услуг определения местоположения.
[0006] В одном исполнении поддержки активированной услуги определения местоположения может быть получено по меньшей мере одно относящееся к определению местоположения измерение для терминала. Каждое относящееся к определению местоположения измерение может относиться к расстоянию, пройденному терминалом, или скорости терминала, или местоположению терминала относительно движущейся географической целевой области. Имело ли место событие активатора, может быть определено на основании по меньшей мере одного относящегося к определению местоположения измерения для терминала. Сообщение может быть послано, если событие активатора произошло.
[0007] В одном исполнении, для эквидистантно активированной услуги по меньшей мере одно относящееся к определению местоположения измерение может иметь место для расстояния, пройденного терминалом, которое может быть определено по-разному, как описано ниже. Имело ли место событие активатора, может быть определено на основании расстояния, пройденного терминалом. Например, событие активатора может быть объявлено, если расстояние, пройденное терминалом, превышает заранее заданное расстояние.
[0008] В другом исполнении для «терминал относительно терминала» - активированной услуги, по меньшей мере одно относящееся к определению местоположения измерение может иметь место для местоположения терминала относительно движущейся географической целевой области. Движущаяся географическая целевая область может быть определена на основании местоположения опорного терминала. Событие активатора может быть объявлено, если местоположение терминала соответствует критерию относительно движущейся географической целевой области. Критерием может быть нахождение внутри, снаружи, вход в или покидание движущейся географической целевой области.
[0009] В еще одном исполнении, для активированной скоростью услуги, по меньшей мере одно относящееся к определению местоположения измерение может иметь место для скорости терминала. Имело ли место событие активатора, может быть определено на основании скорости терминала. Например, скорость терминала может периодически определяться, и максимальная скорость терминала с момента последнего события активирования может быть определена. Событие активатора может быть объявлено, если максимальная скорость превышает заранее заданную скорость.
[0010] В еще одном исполнении для комбинации активированной скоростью-расстоянием-временем (T-D-V) услуги по меньшей мере одно относящееся к определению местоположения измерение может иметь место для расстояния, пройденного терминалом, и скорости терминала. Имело ли место событие активатора, может быть определено на основании расстояния, пройденного терминалом, скорости терминала и/или затраченного времени, начиная с последнего активированного события. Например, множественные выражения могут быть определены. Каждое выражение может быть для расстояния, пройденного терминалом относительно заранее заданного расстояния, или максимальной скорости терминала относительно заранее заданной скорости, или затраченного времени относительно заранее заданного времени. Имело ли место событие активатора, может быть определено на основании функции множественных выражений.
[0011] В еще одном исполнении для услуги скорости терминал относительно терминала, первый терминал может послать запрос о скорости второго терминала, например, в центр определения местоположения. Первый терминал может после этого принять скорость второго терминала или однократно или многократно (например, от центра определения местоположения или второго терминала) в ответ на запрос.
[0012] Другие активированные услуги определения местоположения описаны ниже. Различные аспекты и признаки раскрытия также описаны более подробно ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] ФИГ.1 иллюстрирует примерное развертывание, поддерживающее услуги определения местоположения.
[0014] ФИГ.2 и 3 иллюстрируют два потока сообщений для эквидистантно активированной услуги.
[0015] ФИГ.4 иллюстрирует движущуюся географическую целевую область.
[0016] ФИГ.5 и 6 иллюстрируют два потока сообщений для «терминал относительно терминала» - активированной услуги.
[0017] ФИГ.7 иллюстрирует поток сообщений для услуги, активированной скоростью.
[0018] ФИГ.8 иллюстрирует поток сообщений для услуги, активированной комбинацией T-D-V.
[0019] ФИГ.9 иллюстрирует поток сообщений для услуги скорости терминала относительно терминала.
[0020] ФИГ.10 иллюстрирует процесс для поддержки активированных услуг определения местоположения.
[0021] ФИГ.11 иллюстрирует процесс для поддержки услуги скорости терминала относительно терминала.
[0022] ФИГ.12 иллюстрирует блок-схему терминала, беспроводной сети и сервера определения местоположения.
ПОДРОБНОЕ ОПИСАНИЕ
[0023] Способы для поддержки активированных услуг определения местоположения описаны ниже. Эти способы могут использоваться для терминалов, обменивающихся с различными беспроводными сетями. Термин "сеть" и "система" часто используется взаимозаменяемо. Например, способы могут использоваться для беспроводных сетей, определенных организацией, названной "Проектом Партнерства 3-го поколения" (3GPP) и беспроводных сетей, определенных организацией, названной "Проект Партнерства 3-го поколения 2" (3GPP2).
[0024] Способы могут также использоваться для пользовательской плоскости и архитектуры/решений определения местоположения плоскости управления. Архитектура определения местоположения пользовательской плоскости является архитектурой определения местоположения, которая посылает сообщения для услуг определения местоположения через пользовательскую плоскость. Пользовательской плоскостью является механизм для переноса сигнализации и данных для приложений более высокого уровня и использования носителя пользовательской плоскости, который типично реализуется стандартными протоколами, такими как Протокол дейтаграмм пользователя (UDP), протокол TCP (TCP), и Интернет-протокол (IP). Архитектурой определения местоположения плоскости управления является архитектура определения местоположения, которая посылает сообщения для услуг определения местоположения через плоскость управления. Плоскостью управления является механизм для переноса сигнализации для приложений более высокого уровня и типично реализуется специфическими для сети протоколами, интерфейсами и сообщениями сигнализации. Сообщения, поддерживающие услуги определения местоположения, переносятся как часть сигнализации в архитектуре плоскости управления и как часть данных (с точки зрения сети) в архитектуре пользовательской плоскости. Контент сообщений может, однако, быть одним и тем же или аналогичным и в пользовательской плоскости и в архитектуре определения местоположения плоскости управления.
[0025] Для ясности некоторые аспекты способов описаны ниже для Безопасного Определения Местоположения Пользовательской Плоскости (SUPL) от Open Mobile Alliance (OMA). SUPL применим для 3GPP, 3GPP2 и WLAN сетей и описан в публично доступных документах от OMA. Для ясности терминология SUPL используется в большой части описания ниже.
[0026] ФИГ.1 показывает примерное развертывание, поддерживающее услуги определения местоположения. Терминалы 110, 112 и 114 могут обмениваться с беспроводной сетью 120, чтобы получить услуги связи. Терминал может быть стационарным или мобильным и может также называться как мобильная станция (MS), пользовательское оборудование (UE), терминал доступа (AT), абонентская станция, станция, и т.д. Терминал может быть сотовым телефоном, персональным цифровым помощником (PDA), переносным устройством, беспроводным устройством, ноутбуком, беспроводным модемом, беспроводным телефоном, устройством телеметрии, устройством отслеживания, и т.д. Терминал может называться как Терминал с поддержкой SUPL (SET) в SUPL. Термины "терминал" и "SET" использованы взаимозаменяемо в настоящем описании.
[0027] Беспроводная сеть 120 может быть беспроводной глобальной сетью (WWAN), беспроводной сетью масштаба области (WMAN), беспроводной локальной сетью (WLAN), и т.д. WWAN может быть сетью с множественным доступом с кодовым разделением каналов (CDMA) IX, Широкополосной CDMA (WCDMA) сетью, сетью Глобальной Системы для Мобильной Связи (GSM), сетью проекта долгосрочного развития (LTE), и т.д. WMAN может реализовать IEEE 802.16, который обычно упоминается как WiMAX. WLAN может реализовать IEEE 802.11 (который обычно упоминается как Wi-Fi), HiperLAN, и т.д.
[0028] SET может принимать и измерять сигналы от спутников, таких как спутник 150, чтобы получить измерения псевдодиапазона для спутников. Спутники могут быть частью Глобальной Системы Позиционирования Соединенных Штатов (GPS), европейской системы Galileo, российской системы GLONASS, или некоторой другой спутниковой системы позиционирования (SPS), или комбинации этих систем. Измерения псевдодиапазона и известные местоположения спутников могут использоваться, чтобы получить оценку местоположения для SET. Оценка местоположения может также называться как оценка позиции, привязка позиции, и т.д. SET может также принимать и измерять сигналы от базовых станций в пределах беспроводной сети 120, чтобы получить распределение во времени и/или измерения уровня сигнала для базовых станций. Распределение во времени и/или измерения уровня сигнала и известные местоположения базовых станций могут использоваться, чтобы получить оценку местоположения для SET. Обычно оценка местоположения может быть получена на основании измерений для спутников, базовых станций, псевдолитов и/или других передатчиков и использования одного или комбинации способов позиционирования.
[0029] Платформа Определения Домашнего Местоположения SUPL (H-SLP) 130 может обмениваться с терминалами SET, чтобы поддерживать услуги определения местоположения для этих SET. Услуги определения местоположения могут включать в себя любые услуги, основанные на, или относящиеся к, информации местоположения. Услуги определения местоположения могут включать в себя позиционирование, которое является процессом для определения географической или гражданской оценки местоположения для SET. Позиционирование может обеспечить (i) широту, долготу, и возможно высотные координаты и погрешность для географической оценки местоположения или (ii) уличный адрес для гражданской оценки местоположения. Позиционирование может также обеспечить скорость и/или другую информацию. H-SLP 130 может включать в себя Центр определения местоположения SUPL (SLC) 132 и Центр Позиционирования SUPL (SPC) 134. SLC 132 может поддерживать услуги определения местоположения, координировать работу SUPL и взаимодействовать с терминалами SET по носителю пользовательской плоскости. SLC 132 может выполнять функции для конфиденциальности, инициирования, безопасности, поддержке роуминга, выставления/составлению счетов, управлению обслуживанием, вычислению местоположения, и т.д. SPC 134 может поддерживать позиционирование для терминалов SET и доставку данных помощи к терминалам SET и может также быть ответственным за сообщения и процедуры, используемые для вычисления местоположения. SPC 134 может выполнять функции для безопасности, доставки данных помощи, поиска эталона, вычисления местоположения и т.д.
[0030] Агент SUPL 140 может быть клиентом определения местоположения и может обмениваться (например, непосредственно или через одну или более сетей) с H-SLP 130, чтобы получить информацию местоположения для целевых терминалов SET. Целевой SET - это SET, для которого информация местоположения ищется агентом SUPL. Информация местоположения может содержать оценку местоположения и/или любую информацию, относящуюся к местоположению или скорости. SET может также иметь агент SUPL, резидентный в SET. Например, SET 114 имеет агент SUPL 144 в SET.
[0031] SET может быть способным определять позицию и может быть в состоянии определить свое местоположение с или без помощи от сети. Для режима, основанного на SET, местоположение SET может быть определено этим SET, возможно с помощью данных от SPC. Для режима с ассистированием SET, местоположение SET может быть определено посредством SPC с помощью (например, измерения) от SET. SET может поддерживать один или более способов позиционирования, такие как автономный GPS, с помощью GPS (A-GPS), усовершенствованная трилатерация прямой линии связи (A-FLT), усовершенствованный способ наблюдаемой разницы во времени (EOTD), наблюдаемой разницы во времени прибытия (OTDOA), гибридный, и т.д. Для простоты термин "GPS" может относиться к любому SPS, такому как GPS, Galileo, GLONASS, и т.д. Автономный GPS и A-GPS способы могут обеспечить оценку местоположения для SET, на основе исключительно спутниковых измерений, и иметь высокую точность. Гибридный способ может обеспечить оценку местоположения, основанную и на спутнике и на измерениях базовой станции, и имеет высокую точность и высокую надежность. A-FLT, EOTD и OTDOA способы могут обеспечить оценку местоположения, основанную на распределении времени измерений базовых станций, сделанных SET, и иметь хорошую точность. SET может также поддерживать другие способы позиционирования.
[0032] В одном аспекте могут быть поддержаны различные активированные услуги определения местоположения. Активированная услуга определения местоположения может предоставить агенту SUPL информацию местоположения для целевого SET всякий раз, когда событие активатора происходит. Различные активированные услуги определения местоположения могут быть ассоциированы с различными типами активатора. Таблица 1 перечисляет некоторые активированные услуги определения местоположения и обеспечивает короткое описание каждой активированной услуги определения местоположения. Другие активированные услуги определения местоположения могут также быть поддержаны на основании других типов активатора. Активированные услуги определения местоположения в Таблице 1 описаны более подробно ниже.
|
[0033] Эквидистантно активированная услуга может периодически определять местоположение целевого SET и сообщать информацию местоположения, когда целевой SET переместился на заранее заданное расстояние. Расстояние может относиться к (i) расстоянию по прямой линии между текущим местоположением SET и его начальным местоположением, когда начался мониторинг расстояния, или (ii) полному расстоянию обычно нелинейного пути, прослеженного посредством SET, начиная с покидания его начального местоположения, или (iii) расстоянию, определенному некоторым другим способом. Агент SUPL может инициировать эквидистантно активированную услугу, идентифицировать целевой SET, и обеспечивать приемлемые параметры.
[0034] Эквидистантно активированная услуга может использоваться, чтобы периодически контролировать мобильный терминал (например, SET 110) и посылать уведомление третьей стороне (например, агенту SUPL 140) всякий раз, когда терминал прошел заранее заданное расстояние. Например, центр операций автотранспортной компании может хотеть знать местоположение грузовиков в его поездке после того, как пройдены каждые 10 миль. Третья сторона (например, центр операций) может послать запрос местоположения в сервер определения местоположения (например, H-SLP 130). Сервер определения местоположения совместно с терминалом (который может быть способным определять позицию) может начать процедуру определения позиции, которая может позволить обнаружить - переместился ли терминал на заранее заданное расстояние. Всякий раз, когда это событие происходит, сервер определения местоположения может уведомить клиента местоположения.
[0035] ФИГ.2 показывает структуру потока 200 сообщений для эквидистантно активированной услуги. Агент SUPL 140 может желать знать всякий раз, когда целевой SET 110 переместился на заранее заданное расстояние от последнего местоположения, о котором сообщено, и может послать запрос определения местоположения с индикацией эквидистантного активатора к H-SLP 130 (этап A). H-SLP 130 может затем обмениваться с целевым SET 110, чтобы установить эквидистантно активированный сеанс (этап B).
[0036] Местоположение SET 110 может периодически определяться, используя основанный на SET режим или режим с ассистированием SET. Для основанного на SET режиме, SET 110 может автономно выполнять измерения и определять его местоположение. SET 110 может обмениваться с H-SLP 130, чтобы получить данные помощи всякий раз, когда необходимо. Для режима с ассистированием SET, SET 110 может участвовать в сеансе позиционирования с H-SLP 130, и H-SLP 130 может вычислять оценку местоположения, основанную на измерениях от SET 110. В общем случае местоположение SET 110 может быть определено исключительно посредством SET 110, SET 110 с помощью от H-SLP 130, H-SLP 130 с помощью от SET 110, и т.д. Кроме того, оценка активированного условия может быть выполнена посредством или SET 110 или H-SLP 130.
[0037] Местоположение SET 110 может быть определено в начале эквидистантно активированного сеанса и использоваться как начальное местоположение. Местоположение SET 110 может также периодически определяться во время эквидистантно активированного сеанса. В одном исполнении местоположение SET 110 может быть определено каждые X секунд, где X может быть любым подходящим значением и может быть определено параметром активатора. В другом исполнении местоположение SET 110 может определяться настолько часто насколько возможно. В еще одном исполнении местоположение SET 110 может быть определено в моменты времени, установленные на основании предполагаемой скорости SET 110 и заранее заданного расстояния. Местоположение SET 110 может таким образом быть определено при более коротких интервалах для более высокой скорости и/или более короткого заранее заданного расстояния, и наоборот. В еще одном исполнении местоположение SET 110 может быть определено на основании датчика, который может обнаружить движение SET 110. Например, местоположение SET 110 может быть определено, в то время как он является движущимся, и может быть сделана пауза в то время, когда он неподвижен. Местоположение SET 110 может также быть определено относительно предыдущего местоположения, используя датчики, например, датчик обнаружения и получения линейного ускорения, датчик обнаружения и получения изменения направления, и т.д. Местоположение SET 110 может также периодически определяться другими способами.
[0038] Местоположение SET 110 может быть определено (этап C), и расстояние, пройденное SET 110, может быть обновлено (этап D). Пройденное расстояние может быть определено по-разному. В одном исполнении пройденное расстояние может быть полным расстоянием, полученным посредством накопления возрастающего расстояния между последовательными местоположениями для SET 110, начиная с последнего сообщения. В этом исполнении SET 110 может (i) определять возрастающее расстояние между его текущим местоположением и последним местоположением, и (ii) суммировать это возрастающее расстояние с накопленным расстоянием для последнего местоположения, чтобы получить накопленное расстояние для текущего местоположения. В другом исполнении пройденное расстояние может быть расстоянием между текущим местоположением и местоположением последнего сообщения, которое может быть начальным местоположением, если никакое сообщение не посылали. В еще одном исполнении пройденное расстояние может быть расстоянием вдоль конкретного маршрута, например, вдоль траектории от начального местоположения до местоположения назначения или вдоль более сложного маршрута. Пройденное расстояние может также быть определено другими способами.
[0039] В одном исполнении SET 110 может проверять события активатора и инициировать сообщение отчета. В другом исполнении H-SLP 130 может проверять события активатора и инициировать сообщение отчета. В общем случае любой подходящий объект может быть назначен, чтобы выполнять проверку и инициировать сообщение отчета. Назначенный объект может быть снабжен местоположением SET 110, параметрами активатора и/или другой уместной информацией. Для ясности большая часть описания ниже предполагает, что SET 110 является назначенным объектом.
[0040] SET 110 может проверять, имело ли место событие активатора, на основании расстояния, пройденного SET 110, и заранее заданного расстояния (этап E). Событие активатора может произойти, если пройденное расстояние превышает заранее заданное расстояние. В этом случае SET 110 может сообщить в H-SLP 130, что событие активатора произошло (этап F). Сообщение может также включать в себя текущее местоположение SET 110, расстояние, пройденное посредством SET 110, и/или другую информацию. H-SLP 130 может затем послать ответ активатора, чтобы сообщить агенту SUPL 140, что событие активатора произошло (этап G). Ответ может включать в себя некоторую или всю информацию, предоставленную в сообщении активатора из SET 110. Если событие активатора не произошло, то этапы F и G могут быть пропущены.
[0041] Этапы C-G могут быть предназначены для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап H). Каждый цикл обработки может включать в себя этапы, чтобы определить текущее местоположение SET 110, определить расстояние, пройденное SET 110, и определить, имело ли место событие активатора. Событие активатора, сообщенное посредством SET 110, и ответ активатора посредством H-SLP 130 могут быть инициированы, если событие активатора произошло, и может быть пропущено в ином случае. Конец эквидистантно активированного сеанса может быть достигнут, например, когда время остановки достигнуто, когда достигнута заранее заданная конечная точка пути, и т.д. После достижения конца эквидистантно активированного сеанса H-SLP 130 и SET 110 может прервать сеанс (этап I).
[0042] ФИГ.3 показывает структуру потока 300 сообщений для эквидистантно активированной услуги, используя сообщения SUPL. Агент SUPL 140 может желать знать всякий раз, когда SET 110 переместился на конкретное расстояние от последнего сообщенного местоположения SET 110. Агент SUPL 140 может послать сообщение запроса ответа местоположения, активированное согласно мобильному протоколу определения местоположения (MLP TLRR) к H-SLP 130, который может быть H-SLP, с которым агент SUPL 140 ассоциирован (этап A). Сообщение MLP TLRR может включать в себя клиентский идентификатор (ID) для агента SUPL 140 (клиент-id), идентификационную информацию мобильной станции (мс-id) для целевого SET 110, индикацию запрошенной эквидистантно активированной услуги, параметры активатора (например, заранее заданное расстояние, начальное время, время остановки и т.д.), и т.д. Параметры активатора могут использоваться, чтобы определить события активатора для сообщения посредством целевого SET 110.
[0043] H-SLP 130 может аутентифицировать агента SUPL 140 и проверить, авторизован ли агент SUPL для запрошенной услуги определения местоположения, на основании клиентского ID. H-SLP 130 может также применить конфиденциальность абонента к агенту SUPL 140 на основании ID мобильной станции. Для проверки конфиденциальности H-SLP 130 может верифицировать, разрешено ли агенту SUPL 140 или этому типу агента SUPL запрашивать информацию местоположения о SET 110 и может ли быть необходимым уведомлять SET 110 относительно этого запроса и разрешено принимать или отклонять этот запрос. H-SLP 130 может вызвать эквидистантно активированную услугу только с согласия пользователя SET 110, чтобы гарантировать конфиденциальность. Эквидистантно активированная услуга может также динамически принимать во внимание модификации параметров настройки конфиденциальности пользователя SET.
[0044] H-SLP 130 может затем искать SET 110, верифицировать, что SET 110 в настоящее время не находится в роуминге, а также верифицировать, что SET 110 поддерживает SUPL (этап B). H-SLP 130 может получить информацию маршрута для SET 110 и использовать информацию маршрута, чтобы послать сообщения в SET 110 (также этап B). H-SLP 130 может послать сообщение SUPL INIT в SET 110, чтобы инициировать сеанс SUPL/определения местоположения для эквидистантно активированной услуги (этап C). Сообщение SUPL INIT может включать в себя ID сеанса (сеанс-id), индикатор эквидистантно активированной услуги, предложенный способ позиционирования (pos-method) и/или другую информацию. ID сеанса может использоваться, чтобы идентифицировать сеанс SUPL.
[0045] SET 110 может принять сообщение SUPL INIT от H-SLP 130 и может или присоединиться к сети передачи данных, если SET 110 уже не присоединен, или устанавливать соединение данных (этап D). SET 110 может оценить правила уведомления и следовать соответствующим действиям. SET 110 может затем послать сообщение SUPL TRIGGERED START, чтобы начать эквидистантно активированный сеанс с H-SLP 130. Это сообщение может включать в себя ID сеанса, возможности SET 110, и т.д. Возможности SET могут включать в себя способы позиционирования, поддерживаемые SET 110, протоколы позиционирования, поддерживаемые SET 110 (например, Протокол LCS радио-ресурсов (RRLP) в 3GPP, управление радио-ресурсами (RRC) в 3GPP, Протокол позиционирования LTE (LPP), TIA-801, и т.д.), и/или другую информацию.
[0046] H-SLP 130 может принять сообщение SUPL TRIGGERED START и может выбрать способ позиционирования для использования для эквидистантно активированного сеанса, рассматривая возможности SET, включенные в принятое сообщение. H-SLP 130 может затем послать в SET 110 сообщение SUPL TRIGGERED RESPONSE, которое может включать в себя ID сеанса, выбранный способ позиционирования (pos-method), параметры активатора, и т.д. (этап F). SET 110 и H-SLP 130 могут освободить безопасное IP соединение после этапа F. H-SLP 130 может послать сообщение ответа, сообщающее MLP-активированное местоположение (TLRA), чтобы сообщить агенту SUPL 140, что эквидистантно активированная услуга была принята (этап G).
[0047] Этапы А-G являются этапами установки для эквидистантно активированного сеанса. Информация местоположения для SET 110 может быть после этого сообщена в соответствии с параметрами активатора, предоставленными агентом SUPL 140 на этапе A, и послана в SET 110 на этапе F.
[0048] SET 110 может участвовать в сеансе позиционирования с H-SLP 130, чтобы получить данные помощи в основанном на SET режиме или определить местоположение SET 110 в режиме с ассистированием SET. SET 110 может послать сообщение SUPL POS INIT, чтобы инициировать сеанс позиционирования с H-SLP 130 (этап H). Это сообщение может включать в себя ID сеанса, ID местоположения (lid), возможности SET, запрос о данных помощи и/или другую информацию. H-SLP 130 может затем участвовать с SET 110 в сеансе SUPL POS (или сеансе позиционирования) (этап I). H-SLP 130 и SET 110 могут обменяться сообщениями для выбранного протокола позиционирования (например, RRLP, RRC, LPP, или TIA-801), чтобы обеспечить данные помощи в SET 110 и/или вычислить оценку местоположения для SET 110. H-SLP 130 может послать оценку местоположения и/или другую информацию в сообщении SUPL REPORT к SET 110 (этап J).
[0049] Местоположение SET 110 может быть определено посредством SET 110 самим или с помощью H-SLP 130 на этапах H, I и J (этап K). Расстояние, пройденное SET 110, может быть обновлено, например, используя любую из схем, описанных выше для вычисления пройденного расстояния (этап L). SET 110 может сравнить пройденное расстояние с заранее заданным расстоянием и определить, переместился ли он на заранее заданное расстояние (этап M). Если SET 110 переместился на заранее заданное расстояние, и событие активатора произошло, то SET 110 может послать сообщение SUPL REPORT в H-SLP 130 (этап N). Это сообщение может включать в себя индикацию, что событие активатора произошло, и может также включать в себя текущее местоположение SET 110, расстояние, пройденное SET 110, и/или другую информацию. В ответ на событие активатора H-SLP 130 может послать сообщение MLP Активированное Сообщение о Местоположении (TLREP) агенту SUPL 140 (этап O). Это сообщение может включать в себя ID запроса, индикацию, что событие активатора произошло, текущее местоположение SET 110, расстояние, пройденное SET 110, дату и время для текущего местоположения, способ позиционирования, используемый для определения текущего местоположения, и/или другую информацию. Этапы N и O могут быть пропущены, если событие активатора не произошло.
[0050] Этапы K-O имеются для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап P). Каждый цикл обработки может включать в себя этапы, чтобы определить текущее местоположение SET 110, определить расстояние, пройденное SET 110, и определять, имело ли место событие активатора. Сообщение отчета может быть инициировано, если событие активатора произошло и может быть пропущено в ином случае. Конец эквидистантно активированного сеанса может быть достигнут, например, когда время остановки достигнуто, когда заранее заданная конечная точка достигнута, и т.д. После достижения конца эквидистантно активированного сеанса H-SLP 130 и SET 110 могут закончить сеанс. H-SLP 130 может послать сообщение SUPL END в SET 110 (этап Q), или SET 110 может послать сообщение SUPL END в H-SLP 130 (не показано на ФИГ.3). H-SLP 130 может также уведомить агента SUPL 140 о конце сеанса. Альтернативно, каждый объект может автономно определить конец сеанса и закончить сеанс, не обмениваясь сигнализацией.
[0051] Активированная (посредством) «SET относительно SET» услуга может периодически определять местоположение целевого SET и местоположение опорного SET и может сообщать информацию местоположения, когда целевой SET вошел или покинул движущуюся географическую целевую области, центрированную в местоположении опорного SET. Агент SUPL может инициировать активированную SET относительно SET услугу, чтобы идентифицировать целевой и опорный терминалы SET, и обеспечивать приемлемые параметры.
[0052] ФИГ.4 показывает географическую целевую область 410 для активированной SET относительно SET услуги. Географическая целевая область может быть центрирована в местоположении опорного SET и может быть круговой областью, определенной радиусом r из местоположения опорного SET. Географическая целевая область может перемещаться синхронно с местоположением опорного SET. В общем случае географическая целевая область может быть определена любой формы, например, более сложным многоугольником. Географическая целевая область может также быть (i) двумерной и определена горизонтальным местоположением или (ii) трехмерной и определена и горизонтальным местоположением и высотой.
[0053] Например, мать и ребенок могут находиться в торговом центре. Мать может хотеть быть уведомленной всякий раз, когда ребенок двигается вне области радиусом 30 ярдов вокруг нее, что может называться как сценарий "потерянный ребенок". Мать может нести опорный терминал, и ребенок может нести целевой терминал. Географическая целевая область может быть определена как круговая область с радиусом r, центрированным в местоположении матери. Географическая целевая область может следовать за движением матери, то есть, перемещаться с матерью. Всякий раз, когда ребенок (или целевой терминал) покидает географическую целевую область вокруг матери (например, когда ребенок движется больше чем на расстоянии в 30 ярдов от матери), агент SUPL может быть уведомлен. Агент SUPL может затем уведомить мать, что ребенок покинул географическую целевую область, например, потерялся. Этот пример может также поддерживаться, когда роли терминалов полностью изменены, с матерью, несущей целевой терминал, и ребенком, несущим опорный терминал.
[0054] ФИГ.5 показывает структуру потока 500 сообщений для активированной SET относительно SET услуги. Агент SUPL 140 может желать знать местоположение целевого SET 110 относительно движущейся географической целевой области, определенной местоположением опорного SET 112, и может послать запрос местоположения с индикацией активатора SET относительно SET к H-SLP 130 (этап A). H-SLP 130 может затем связаться с целевым UE 110 и опорным SET 112, чтобы установить активированный SET относительно SET сеанс (этапы B и C).
[0055] В одном исполнении целевой SET 110 может проверять события активатора и инициировать сообщение отчета. В другом исполнении H-SLP 130 может проверять события активатора и инициировать сообщение отчета. В общем случае любой объект может быть назначен, чтобы выполнять проверку и инициировать сообщение отчета. Назначенный объект может быть снабжен местоположением терминалов SET 110 и 112, параметрами активатора и/или другой уместной информацией. Для ясности большая часть описания ниже предполагает, что целевой SET 110 является назначенным объектом.
[0056] Местоположение опорного SET 112 может быть определено, например, в основанном на SET режиме или режиме с ассистированием SET (этап D). Местоположение опорного SET 112 может быть предоставлено в H-SLP 130 (этап E), который может отправить это местоположение в целевой SET 110 (этап F). Альтернативно, местоположение опорного SET 112 может быть предоставлено непосредственно опорным SET 112 в целевой SET 110, не проходя через H-SLP 130 (как показано пунктирной линией на ФИГ.5).
[0057] Местоположение опорного SET 110 может также быть определено, например, в основанном на SET режиме или режиме с ассистированием SET (этап G). Целевой SET 110 может проверять, имело ли место событие активатора, на основании местоположений терминалов SET 110 и 112 и параметрах активатора, определяющих географическую целевую область (этап H). Событие активатора может произойти, если целевой SET 110 находится или переместился внутри или снаружи географической целевой области. В этом случае целевой SET 110 может сообщить в H-SLP 130, что событие активатора произошло (этап I). Сообщение может включать в себя текущее местоположение целевого SET 110, текущее местоположение опорного SET 112, местоположение целевого SET 110 относительно опорного SET 112 (например, в 50 метрах к востоку) и/или другую информацию. H-SLP 130 может затем послать ответ активатора, чтобы информировать агента SUPL 140, что событие активатора произошло (этап J). Ответ может включать в себя некоторую или всю информацию, предоставленную в сообщении активатора из SET 110. Если событие активатора не произошло, то этапы I и J могут быть пропущены.
[0058] Этапы D-J могут быть для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап K). Каждый цикл обработки может включать в себя этапы, чтобы определить текущее местоположение опорного SET 112, определить текущее местоположение целевого SET 110 и определить, имело ли место событие активатора. Местоположение опорного SET 112 может быть определено с той же самой или отличной частотой, как местоположение целевого SET 110. Событие активатора, сообщенное в отчете целевым SET 110, и ответ активатора посредством H-SLP 130 могут быть инициированы, если событие активатора произошло и может быть пропущено в ином случае. Конец активированного SET относительно SET сеанса может быть достигнут, например, когда время остановки достигнуто, и т.д. После достижения конца сеанса H-SLP 130 и терминалы SET 110 и 112 могут закончить сеанс (этапы L и M).
[0059] В другом исполнении вместо получения местоположения опорного и целевого терминалов SET на этапах D и G на ФИГ.5, любой SET может определить свое местоположение относительно другого SET периодически на этих этапах. Например, на этапе G целевой SET 110 может послать сигнал (например, радиосигнал или инфракрасный сигнал) непосредственно на опорный SET 112, который может возвратить сигнал ответа назад в SET 110. SET 110 может измерить полное время ответа и вычесть внутреннюю задержку в SET 112, которую SET 112 может включать в свой сигнал ответа к SET 110, или SET 110 может определить другим средством. SET 110 может получить задержку распространения сигнала передачи туда и обратно и, следовательно, расстояние между собой и SET 112. Это расстояние может затем использоваться, чтобы оценить условие активатора. В еще одном исполнении начальные местоположения обоих терминалов SET 110 и 112 могут быть получены на этапах D и G, и последующие местоположения могут быть получены, используя местоположение каждого SET относительно этих начальных местоположений. Относительные местоположения могут также быть получены, используя датчики в каждом SET, которые могут требовать меньше ресурсов сигнализации и обработки для получения, и могут быть получены в более коротких интервалах.
[0060] ФИГ.6 показывает структуру потока 600 сообщений для активированной SET относительно SET услуги, используя сообщения SUPL. Агент SUPL 140 может желать знать местоположение целевого SET 110 относительно движущейся географической целевой области, определенной местоположением опорного SET 112, и может послать сообщение MLP TLRR в H-SLP 130 (этап A). Сообщение MLP TLRR может включать в себя идентификационную информацию агента SUPL (id клиента, client-id), идентификационную информацию целевого SET (id целевой мс, targed ms-id), идентификационную информацию опорного SET (ref ms-id), индикацию запрашиваемой активированной SET относительно SET услуги, параметры активатора и т.д. Параметры активатора могут включать в себя информацию относительно географической целевой области вокруг опорного SET (например, радиус r), информацию активатора события (например, внутри, снаружи, вход или выход из целевой области), продолжительность сеанса (например, время начала, время остановки и т.д.) и/или другую информацию, которая может использоваться, чтобы определить события активатора для сообщения в виде отчета.
[0061] H-SLP 130 может аутентифицировать и авторизовать агента SUPL 140 для активированной SET относительно SET услуги. H-SLP 130 может также выполнить уведомление и/или проверку с терминалами SET 110 и 112. Например, H-SLP 130 может получить одобрение от пользователя опорного SET 112, чтобы разрешить определить местоположение опорного SET 112 и, возможно, совместно использовать с целевым SET 110, H-SLP 130, и/или агентом SUPL 140. H-SLP 130 может также получить одобрение от пользователя целевого SET 110, чтобы разрешить определить местоположение целевого SET 110 и, возможно, совместно использовать с опорным SET 112, H-SLP 130, и/или агентом SUPL 140. Активированная SET относительно SET услуга может также динамически принять во внимание модификации параметров настройки конфиденциальности каждого пользователя SET.
[0062] H-SLP 130 может искать терминалы SET 110 и 112 и получать информацию маршрута для этих терминалов SET (этап B). H-SLP 130 может послать сообщение SUPL INIT на опорный SET 112, чтобы инициировать сеанс SUPL для активированной SET относительно SET услуги (этап C). SET 112 может принять сообщение SUPL INIT и может присоединиться сам или установить соединение данных (этап D). SET 112 может оценить правила уведомления и следовать подходящим действиям. SET 112 может затем послать сообщение SUPL TRIGGERED START, чтобы начать активированный SET относительно SET сеанс с H-SLP 130 (этап E). H-SLP 130 может принять сообщение SUPL TRIGGERED START от SET 112 и может выбрать способ позиционирования для использования для SET 112. H-SLP 130 может затем послать в SET 112 сообщение SUPL TRIGGERED RESPONSE, которое может включать в себя ID сеанса, выбранный способ позиционирования, параметры активатора и т.д. (этап F). H-SLP 130 может аналогично выполнить этапы C-F для целевого SET 110 (этап G). H-SLP 130 может послать сообщение MLP TLRA, чтобы информировать агента SUPL 140, что активированная SET относительно SET услуга была принята (этап H).
[0063] H-SLP 130, целевой SET 110 и опорный SET 112 могут после этого совместно действовать, чтобы обнаружить возникновение события активатора. Местоположение каждого SET может быть периодически определено (например, каждые X секунд) во время сеанса. В одном исполнении SET может автономно делать измерения и определять свое местоположение. В другом исполнении SET может участвовать на сеансе позиционирования с H-SLP 130, чтобы определить свое местоположение. В общем случае местоположение каждого SET может быть определено исключительно этим SET, посредством SET с помощью от H-SLP 130, H-SLP 130 с помощью от SET и т.д. Опорный SET 112 может выполнять этапы I, J и K, по мере необходимости, чтобы получить данные помощи из H-SLP 130 или определить свое местоположение для режима с ассистированием SET. Аналогично, целевой SET 110 может выполнять этапы I, J и K, по мере необходимости, чтобы получить данные помощи из H-SLP 130 или определить свое местоположение для режима с ассистированием SET. Этапы I, J и K могут быть выполнены, как описано выше для этапов H, I и J, соответственно, на ФИГ.3.
[0064] В одном исполнении целевой SET 110 может проверять событие активатора и инициировать сообщение отчета. В другом исполнении H-SLP 130 может проверять событие активатора и инициировать сообщение отчета. В еще одном исполнении опорный SET 112 может проверять событие активатора и инициировать сообщение отчета. В общем случае любой объект или любая комбинация объектов могут быть назначены, чтобы выполнять проверку и инициировать сообщение отчета. Определяемый объект или объекты могут быть снабжены текущими местоположениями терминалов SET 110 и 112 и параметрами активатора. Для ясности описание ниже предполагает, что целевой SET 110 проверяет событие активатора и инициирует сообщение отчета.
[0065] Опорный SET 112 может определить свое местоположение (этап L) и может послать сообщение SUPL REPORT с его текущим местоположением к H-SLP 130 (этап M). Для механизма извлечения информации целевой SET 110 может послать сообщение SUPL POSITION REQUEST в H-SLP 130, чтобы запросить текущее местоположение опорного SET (этап N). В ответ H-SLP 130 может отправить текущее местоположение опорного SET 112 в сообщении SUPL REPORT на целевой SET 110 (этап O). Механизм извлечения информации может разрешить целевому SET 110 запросить информацию местоположения удобным для него способом, например, когда целевой SET 110 имеет открытое соединение. Для механизма распространения информации H-SLP 130 может отправлять местоположение опорного SET 112 всякий раз, когда она принята из SET 112. В этом случае этап O может иметь место, но этап N может быть пропущен. Механизм распространения информации может разрешить H-SLP 130 обеспечивать местоположение опорного SET всякий раз, когда она доступна, без потребности в том, чтобы опорный SET 110 периодически запрашивал ее. Опорный SET 112 может также послать свое текущее местоположение непосредственно на целевой SET 110, не взаимодействуя с H-SLP 130.
[0066] Целевой SET 110 может определить свое местоположение (этап P). Целевой SET 110 может сравнить свое текущее местоположение с текущим местоположением опорного SET 112 и может определить, находится ли он в пределах или снаружи или переместился в или из географической целевой области, определенной текущим местоположением опорного SET 112 (этап Q). Если событие активатора произошло, то целевой SET 110 может послать сообщение SUPL REPORT с индикацией активатора события и возможно его текущего местоположения и/или местоположения опорного SET 112 к H-SLP 130 (этап R). H-SLP 130 может затем послать агенту SUPL 140 MLP TLREP сообщение, которое может включать в себя ID запроса, индикацию активатора события, и возможно другую информацию, такую как местоположение целевого SET 110, местоположение опорного SET 112, дата и время для каждого местоположения, способ позиционирования, используемый для определения каждого местоположения, и/или другую информацию (этап S). Целевой SET 110 может быть информирован о событии активатора относительно местоположения опорного SET 112, например, активированном целевым SET 110. Опорный SET 112 может быть также информирован об активированном событии относительно его собственной позиции, например, активированном целевым SET 110.
[0067] Этапы L-S предназначены для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап T). Каждый цикл обработки может включать в себя этапы, чтобы определить текущее местоположение каждого SET и определить, имело ли место событие активатора. Сообщение может быть инициировано (например, на этапах R и S), если событие активатора произошло и может быть пропущено в ином случае. Конец активированного SET относительно SET сеанса может быть достигнут, например, когда время остановки достигнуто и т.д. После достижения конца сеанса H-SLP 130, целевой SET 110 и опорный SET 112 могут закончить сеанс. H-SLP 130 может послать сообщение SUPL END в каждый SET (этапы U и V). SET может также послать сообщение SUPL END. H-SLP 130 может также уведомить агента SUPL 140 о конце сеанса.
[0068] Активированная SET относительно SET услуга может использоваться, чтобы периодически контролировать движение целевого терминала относительно географической целевой области с опорным терминалом в качестве его центра. Географическая целевая область может быть определена относительно опорного терминала (а не целевого терминала, как имеет место для других активированных услугах), и может перемещаться в синхронизме с опорным терминалом. Уведомление может быть послано третьей стороне (например, агенту SUPL 140) всякий раз, когда целевой терминал находится в пределах или снаружи, входит или выходит из географической целевой области. Третья сторона может послать запрос местоположения в сервер определения местоположения (например, H-SLP 130). Сервер определения местоположения может начать процедуру определения позиции как с целевым терминалом так и с опорным. Местоположение опорного терминала может периодически определяться и сравниваться с местоположением целевого терминала, чтобы разрешить обнаружение целевого терминала, находящегося внутри или снаружи, входящего или выходящего из географической целевой области вокруг опорного терминала. Всякий раз, когда это событие активатора обнаружено, сервер определения местоположения может уведомить клиента местоположения и возможно целевой терминал и/или опорный терминал.
[0069] Активированная скоростью услуга может периодически определять, достигла ли скорость целевого SET заранее заданной скорости (то есть, уровня скорости) и может сообщить эту скорость, когда событие активатора обнаружено. Агент SUPL может инициировать активированную скоростью услугу, идентифицировать целевой SET и обеспечивать соответствующие параметры.
[0070] Скорость может включать в себя скорость и/или курс. Скорость может указывать, как быстро SET перемещается, и курс может указывать направление, в котором SET перемещается. В общем случае критерий активатора может быть определен на основании только скорости, или только курса или и скорости и курса. Например, критерий активатора может быть определен, чтобы послать отчет, (i) когда грузовик достигает скорости 70 миль в час, или (ii) когда грузовик направляется на север, или (iii) когда грузовик направляется на север со скоростью, больше чем 70 миль в час. Критерий активатора может также быть определен для увеличения и/или уменьшения скорости. Например, сообщение может быть послано, когда грузовик достигает 70 миль в час (начиная со стоп-сигнала). Грузовик может ускориться далее и достигнуть 90 миль в час. Другое сообщение может быть послано, когда грузовик замедляется до 70 миль в час. Альтернативно, другое сообщение может быть послано, если грузовик замедляется ниже более низкого уровня (например, 65 миль в час) и затем превышает 70 миль в час. В общем случае скорость, используемая для услуги, активированной скоростью, может относиться только к скорости, или только к курсу, или и скорости и курсу. Различные критерии активатора могут также использоваться для услуги, активированной скоростью.
[0071] Активатор скорости может быть определен по-разному. В одном исполнении активатор скорости может произойти, когда скорость целевого SET сначала понижается ниже более низкого уровня и после этого достигает или превышает заранее заданную скорость. Более низкий уровень может быть определен на основании заранее заданной скорости, например, может быть некоторая граница ниже заранее заданной скорости. Например, грузовик может начать движение на светофоре и после этого достигнуть заранее заданной скорости 70 миль в час, которая может быть определена на основании ограничения скорости 65 миль в час плюс допуск 5 миль в час. Активатор скорости может произойти, когда грузовик сначала достигает 70 миль в час, и никакой активатор скорости может не иметь места, пока грузовик продолжает ускоряться выше более низкого уровня. Более низкий уровень может составлять 60 миль в час, который может быть определен на основании ограничения скорости в 65 миль в час минус допуск 5 миль в час. Другой активатор скорости может произойти, если грузовик замедляется ниже более низкого уровня 60 миль в час и затем достигает или превышает заранее заданную скорость 70 миль в час. В другом исполнении активатор скорости может произойти, если скорость целевого SET превышает заранее заданную скорость, но может быть ограничен самое большее одним активатором скорости в каждом заранее заданном временном интервале. Для примера выше, активатор скорости может происходить каждый заранее заданный временной интервал в 5 минут, в котором грузовик достигает или превышает заранее заданную скорость. Активатор скорости может также быть определен другими способами.
[0072] ФИГ.7 показывает структуру потока 700 сообщений для активированной скоростью услуги, используя сообщения SUPL. Агент SUPL 140 может желать знать всякий раз, когда скорость целевого SET 110 достигла целевой скорости, и может послать сообщение MLP TLRR в H-SLP 130 (этап A). Сообщение MLP TLRR может включать в себя идентификационную информацию агента SUPL, идентификационную информацию целевого SET, индикацию запрошенной активированной скоростью услуги, параметры активатора и т.д. Параметры активатора могут включать в себя целевую скорость, начальное время, время остановки и т.д. H-SLP 130 может аутентифицировать и авторизовать агента SUPL 140 для услуги, активированной скоростью. H-SLP 130 может также выполнить уведомление и/или проверку с целевым SET 110. Активированная скоростью услуга может также динамически учитывать модификации параметров настройки конфиденциальности пользователя целевого SET.
[0073] H-SLP 130 может искать SET 110 и получать информацию маршрута для SET (этап B). H-SLP 130 может послать сообщение SUPL INIT в SET 110, чтобы инициировать сеанс SUPL для услуги, активированной скоростью (этап C). SET 110 может принять сообщение SUPL INIT и присоединиться или установить соединение передачи данных (этап D). SET 110 может оценить правила уведомления и следовать соответствующим действиям. SET 110 может затем послать сообщение SUPL TRIGGERED START, чтобы инициировать активированный скоростью сеанс с H-SLP 130 (этап E). H-SLP 130 может принять сообщение SUPL TRIGGERED START, выбирать способ позиционирования для использования для SET 110, и возвратить сообщение SUPL TRIGGERED RESPONSE, которое может включать в себя ID сеанса, выбранный способ позиционирования, параметры активатора и т.д. (этап F). H-SLP 130 может послать MLP TLRA сообщение, чтобы сообщить агенту SUPL 140, что активированная скоростью услуга была принята (этап G).
[0074] H-SLP 130 и целевой SET 110 могут после этого действовать совместно, чтобы обнаружить возникновение активированного события. Скорость SET 110 может периодически определяться (например, каждые X секунд) во время сеанса. В одном исполнении SET может автономно сделать измерения и определить свою скорость. В другом исполнении SET может взаимодействовать с H-SLP 130, чтобы определить свою скорость. В общем случае, скорость SET 110 может быть определена исключительно посредством SET 110, SET 110 с помощью от H-SLP 130, H-SLP 130 с помощью от SET 110 и т.д. Целевой SET 110 может выполнять этапы H, I и J по мере необходимости, получить данные помощи из H-SLP 130 или определить свою скорость для режима с ассистированием SET.
[0075] В одном исполнении целевой SET 110 может проверять событие активатора и инициировать сообщение отчета. SET 110 может определить свою скорость (этап K). SET 110 может сравнить свою текущую скорость с целевой скоростью и может определить, превысила ли текущая скорость целевую скорость (этап L). Если событие активатора произошло, то целевой SET 110 может послать сообщение SUPL REPORT с индикацией активированного события и, возможно, своей скоростью, к H-SLP 130 (этап M). H-SLP 130 может затем послать агенту SUPL 140 сообщение MLP TLREP, которое может включать в себя ID запроса, индикацию активатора события, скорость SET 110, местоположение SET 110 и т.д. (этап N). В другом исполнении H-SLP 130 может проверять событие активатора и инициировать сообщение отчета. В общем случае, любой объект может быть назначен, чтобы выполнять проверку и инициировать сообщение отчета. Назначенный объект может быть снабжен скоростью SET 110 и параметрами активатора.
[0076] Этапы K-N предназначены для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап O). Каждый цикл обработки может включать в себя этапы, чтобы определить скорость SET 110 и определить, имело ли место событие активатора. Сообщение отчета может быть инициировано, если событие активатора произошло и может быть пропущено в ином случае. Конец активированного скоростью сеанса может быть достигнут, например, когда время остановки достигнуто, и т.д. После достижения конца активированного скоростью сеанса H-SLP 130 и SET 110 могут закончить сеанс. H-SLP 130 может послать сообщение SUPL END в SET 110 (этап P). H-SLP 130 может также уведомить агента SUPL 140 о конце сеанса.
[0077] Активированная скоростью услуга может использоваться, чтобы периодически контролировать целевой терминал и посылать уведомление третьей стороне (например, агент SUPL 140) всякий раз, когда скорость целевого терминала достигает заранее заданного уровня. Третья сторона может послать запрос местоположения в сервер определения местоположения (например, H-SLP 130). Сервер определения местоположения совместно с целевым терминалом может начать процедуру определения позиции и скорости. Эта процедура может учесть обнаружение скорости терминала, превышающей заранее заданный уровень. Всякий раз, когда это событие активатора обнаружено, сервер определения местоположения может сообщить местоположение клиенту. Это услуга может использоваться, например, центром операций автотранспортной компании, которая может хотеть знать всякий раз, когда их грузовики превышают 70 миль в час. Это услуга может также использоваться страховой компанией, чтобы верифицировать, что ее страхователи обычно придерживаются ограничений локальной скорости, например, что может затем дать право страхователю снижать страховой взнос.
[0078] Активированная комбинацией T-D-V услуга может поддерживать события активатора, определенные на основании комбинации прошедшего времени с момента последнего сообщения, расстояния, пройденного, начиная с последнего сообщения, и достигнутой максимальной скорости, начиная с последнего сообщения. Активированная комбинацией T-D-V услуга может также поддерживать другие комбинации истекшего времени, пройденного расстояния, максимальной скорости и/или других параметров. Например, активатор комбинации T-D-V (или условие активатора) может быть определен на основании одной из следующих функций времени, расстояния и скорости:
f (T) И/ИЛИ g (D) И/ИЛИ h(V), Ур. (1)
или
[f1(T) И/ИЛИ g (D)] И/ИЛИ [f2 (T) И/ИЛИ h(V)], Ур. (2)
где T, D и V являются текущими значениями для прошедшего времени, пройденного расстояния, и максимальной скорости, начиная с последнего сообщения, соответственно,
f (T) выражение (например, Булево выражение) для активатора времени,
g (D) является выражением (например, Булево выражение) для активатора расстояния,
h(V) выражение (например, Булево выражение) для активатора скорости,
"И" обозначает операцию логического И, и
"ИЛИ" обозначает операцию логического ИЛИ.
[0079] Булево выражение может возвратить результат «истина» или «ложь» на основании функции его входных параметров. Как пример, булево выражение для пройденного расстояния, может быть определено как g (D)=(D≥D1), где D1 - заранее заданное расстояние. Выражение может быть истинным, если пройденное расстояние D равно или больше, чем заранее заданное расстояние D1, и может быть ложным иначе. f1(T) и f2(T) могут быть двумя булевыми выражениями для активатора времени, заданные посредством fi(T)=(T≥Ti), для i=1 или 2, где T1 и T2 - два заранее заданных значения для прошедшего времени. Выражения для активатора скорости могут быть определены аналогичным образом. Как только любое условие активатора происходит, оно может оставаться действительным до следующего сообщения. Это может препятствовать появлению активатора и затем последующему исчезновению, пока новое сообщение не будет послано.
[0080] Например, центр управления движением может хотеть обновления о движении своих грузовиков с интересом в сообщениях всякий раз, когда грузовик переместился на 10 миль (D1=10 миль), начиная с последнего сообщения, но не более одного сообщения для каждого грузовика каждый час (T1=60 минут). Центр может также хотеть быть уведомленным немедленно, если грузовик достигает 75 миль в час (V1=75 миль в час). Комбинированная функция активатора может быть определена следующим образом:
[(T≥60 минут) И (D≥10 миль)] ИЛИ (V≥75 миль в час),
где T - время, истекшее с того момента, как послали последнее сообщение,
D - пройденное расстояние с момента последнего сообщения, и
V является максимальной скоростью с момента последнего сообщения.
[0081] Пройденное расстояние D может быть вычислено как (i) сумма возрастающих расстояний между измерениями местоположения или (ii) расстояние до определения местоположения в последнем сообщении. Например, переменные T, D для случая (i) и V могут все возрастающими функциями времени.
[0082] Чтобы избежать генерирования чрезмерных сообщений отчета для ускорения водителей, центр может желать не больше, чем одного сообщения о скорости каждые 10 минут (T2=10 минут). Комбинированная функция активатора может тогда быть определена следующим образом:
[(T≥60 минут) И (D≥10 миль)] ИЛИ [(T≥10 минут) И (V≥75 миль в час)].
Как показано в уравнении выше, различные заранее заданные значения времени могут использоваться с различными заранее заданными значениями для D и V.
[0083] В одном исполнении, чтобы обеспечить большую гибкость для активируемой комбинацией T-D-V услуги, Булевы выражения выше (например, f(T), g(D) и (V)) могут включать в себя или могут зависеть от текущего местоположения SET, набора местоположений SET, начиная с последнего сообщения отчета, текущего времени или периода времени, начиная с последнего сообщения отчета и т.д. Это может использоваться, чтобы установить различные заранее заданные значения для пройденного расстояния, максимальной скорости и времени до следующего сообщения отчета. Например, автотранспортная компания может регулировать заранее заданную максимальную скорость согласно преобладающему (например, максимальному) ограничению скорости для местоположений, пройденных с последнего сообщения отчета. Компания может также регулировать заранее заданное расстояние, пройденное согласно типу маршрута, например, используя более высокое заранее заданное расстояние для грузовика, едущего вдоль главного шоссе. Компания может также регулировать заранее заданный временной интервал согласно времени дня, например, используя меньший интервал в течение занятых периодов путешествия в течение дня и более длинный интервал в течение менее занятых периодов, таких как вечер и ночь.
[0084] ФИГ.8 показывает структуру потока 800 сообщений для активируемой комбинацией T-D-V услуги, используя сообщения SUPL. Агент SUPL 140 может желать знать местоположение и/или информацию скорости для целевого SET 110 и может послать сообщение MLP TLRR в H-SLP 130 (этап A). Сообщение MLP TLRR может включать в себя идентификационную информацию агента SUPL, идентификационную информацию целевого SET, индикацию запрашиваемой активируемой комбинацией T-D-V услуги, параметры активатора и т.д. Параметры активатора могут включать в себя T, D и/или V параметры, желательную комбинированную функцию активатора, например, [(T≥T1) И (D≥D1)) ИЛИ (V≥V1)]), время начала, время остановки и т.д. H-SLP 130 может аутентифицировать и авторизовать агента SUPL 140 для услуги, активированной комбинацией T-D-V. H-SLP 130 может также выполнить уведомление и/или проверку с целевым SET 110. Активированная комбинацией T-D-V услуга может также динамически принимать во внимание модификации параметров настройки конфиденциальности пользователя целевого SET.
[0085] H-SLP 130 может искать SET 110 и получить информацию маршрута для SET (этап B). H-SLP 130 может послать сообщение SUPL INIT в SET 110, чтобы инициировать сеанс SUPL для услуги, активированной комбинацией T-D-V (этап C). SET 110 может принять сообщение SUPL INIT и присоединиться или установить соединение передачи данных (этап D). SET 110 может оценить правила уведомления и следовать соответствующим действиям. SET 110 может затем послать сообщение SUPL TRIGGERED START, чтобы инициировать активированный комбинацией T-D-V сеанс с H-SLP 130 (этап E). H-SLP 130 может принять сообщение SUPL TRIGGERED START, выбрать способ позиционирования, чтобы использовать для SET 110, и возвратить сообщение SUPL TRIGGERED RESPONSE, которое может включать в себя ID сеанса, выбранный способ позиционирования, параметры активатора и т.д. (этап F). H-SLP 130 может послать MLP TLRA сообщение, чтобы сообщить агенту SUPL 140, что активированная комбинацией T-D-V услуга была принята (этап G).
[0086] Целевой SET 110 может выполнять этапы H, I и J, по мере необходимости, чтобы получить данные помощи из H-SLP 130, или определить свое местоположение и/или скорость для режима с ассистированием SET. H-SLP 130 и целевой SET 110 может совместно действовать, чтобы обнаружить возникновение активированного события. Местоположение и/или скорость SET 110 могут периодически определяться (например, каждые X секунд) во время сеанса. В одном исполнении SET 110 может автономно сделать измерения и определить свое местоположение и/или скорость (этап K). В другом исполнении SET 110 может взаимодействовать с H-SLP 130, чтобы определить свое местоположение и/или скорость (например, используя этапы H, I и J на ФИГ.8). В общем случае, местоположение и/или скорость SET 110 могут быть определены исключительно посредством SET 110, SET 110 с помощью от H-SLP 130, H-SLP 130 с помощью от SET 110 и т.д.
[0087] В одном исполнении целевой SET 110 может проверять событие активатора и инициировать сообщение отчета. SET 110 может определить текущие T, D и V значения и может логически объединить эти значения в соответствии с комбинированной функцией активатора, чтобы определить, имело ли место событие активатора (этап L). Если событие активатора произошло, то целевой SET 110 может послать сообщение SUPL REPORT с индикацией активатора события и возможно его местоположением и/или скоростью к H-SLP 130 (этап M). В другом исполнении H-SLP 130 может проверять событие активатора и инициировать сообщение отчета. В любом случае в ответ на событие активатора H-SLP 130 может послать агенту SUPL 140 сообщение MLP TLREP, которое может включать в себя ID запроса, индикацию активатора события, местоположение и/или скорость SET 110, условия для активатора, которые имели место, и/или другую информацию (этап N).
[0088] Этапы K-N предназначены для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап O). Каждый цикл обработки может включать в себя этапы, чтобы определить местоположение, и/или скорость SET 110, чтобы обновить расстояние, пройденное SET 110, и определить, имело ли место событие активатора. Сообщение может быть инициировано, если событие активатора произошло и может быть пропущено в ином случае. После достижения конца активированного комбинацией T-D-V сеанса (например, когда достигнуто время остановки), H-SLP 130 и SET 110 могут закончить сеанс. H-SLP 130 может послать сообщение SUPL END в SET 110 (этап P). H-SLP 130 может также уведомить агента SUPL 140 о конце сеанса.
[0089] Активированная комбинацией T-D-V услуга может использоваться, чтобы периодически контролировать целевой терминал и посылать уведомление третьей стороне (например, агент SUPL 140) всякий раз, когда событие активатора, на основании времени T, расстоянии D и/или скорости V, происходит. Третья сторона может послать запрос местоположения в сервер определения местоположения (например, H-SLP 130). Сервер определения местоположения и целевой терминал могут действовать совместно, чтобы обнаружить возникновение активированного события, основанного на местоположении и/или скорости терминала. Всякий раз, когда событие активатора обнаружено, сервер определения местоположения может уведомить клиента местоположения.
[0090] В другом аспекте услуга скорости SET относительно SET может разрешить запрос SET, чтобы получить абсолютную или относительную скорость одного или более целевых терминалов SET на продолжающейся основе (например, периодически, однократно и т.д.) во время сеанса скорости SET относительно SET. Агент SUPL может постоянно находиться в запрашивающем SET и может запросить скорость целевого SET. Каждый SET может быть способным выполнить процедуру позиционирования с H-SLP и/или самостоятельно. Процедура позиционирования может предоставить информацию местоположения, которая может включать в себя местоположение и/или скорость SET.
[0091] ФИГ.9 показывает структуру потока 900 сообщений для скорости SET относительно SET услуги, используя сообщения SUPL. Агент SUPL 144 в запрашивающем SET 114 может желать знать скорость целевого SET 110. Так как агент SUPL 144 постоянно находится в SET 114, услуга, инициированная SET, может использоваться, и агент SUPL 144 может внутренне запрашивать SET 114, чтобы инициировать услугу скорости SET относительно SET (этап A). Запрашивающий SET 114 может затем обмениваться с H-SLP 130, чтобы установить активированный инициированный SET сеанс (этап B). Установление сеанса на этапе B может включать в себя (i) посылку посредством SET 114 сообщения SUPL TRIGGERED START к H-SLP 130 и (ii) возврат посредством H-SLP 130 сообщения SUPL TRIGGERED RESPONSE к SET 114. Сообщение SUPL TRIGGERED START может указать для SET услугу скорости SET относительно SET, которую запрашивают, и может также включать в себя информацию, такую как идентификационная информация запрашивающего SET, идентификационную информацию целевого SET, индикацию того, относительную или абсолютную скорость запрашивают, время начала и время остановки сеанса, количество привязок, интервал между привязками и т.д. H-SLP 130 может аутентифицировать и авторизовать SET 114 для услуги скорости SET относительно SET. Вслед за установлением сеанса на этапе B, SET 114 может уведомить запрос внутренне агенту SUPL 144 и может подтвердить, что запрошенная услуга будет выполнена (этап C). H-SLP 130 может установить сеанс местоположения с целевым SET 110 (этапы D к H). Это может включать в себя уведомление и/или проверку с SET 110.
[0092] H-SLP 130 может совместно работать с запрашивающим SET 114 и/или целевым SET 110, чтобы определить скорость целевого SET 110, определить скорость опорного SET 114, обеспечить помощь на целевой SET 110, и/или обеспечить помощь опорному SET 114 во время сеанса. H-SLP 130 может также быть вовлечен в совместное использование скорости целевого SET 110 с запрашивающим SET 114 и/или скорости запрашивающего SET 114 с целевым SET 110 во время сеанса.
[0093] Целевой SET 110 может выполнять этапы I, J и K, по мере необходимости, получать данные помощи из H-SLP 130 или определять свою скорость для режима с ассистированием SET. Аналогично, опорный SET 114 может выполнять этапы I, J и K, по мере необходимости, получать данные помощи из H-SLP 130 или определять свою скорость. Целевой SET 110 может определить свою скорость (этап L) и может послать сообщение SUPL REPORT со своей скоростью к H-SLP 130 (этап M). Запрашивающий SET 114 может послать сообщение SUPL POSITION REQUEST в H-SLP 130, чтобы запросить скорость целевого SET 110 (этап N). В ответ H-SLP 130 может отправить текущую скорость целевого SET 110 в сообщении SUPL REPORT к запрашивающему SET 114 (этап O). H-SLP 130 может также отправить скорость целевого SET 110 всякий раз, когда она принята от SET 110. Целевой SET 110 может также послать его скорость непосредственно в запрашивающий SET 114, не взаимодействуя с H-SLP 130 (например, как обозначено пунктирной линией на ФИГ.9). В любом случае, запрашивающий SET 114 может выдать скорость целевого SET 110 агенту SUPL 144 (этап P).
[0094] Этапы L-P предназначены для одного цикла обработки. Дополнительные циклы обработки могут быть выполнены аналогичным образом (этап Q). Каждый цикл обработки может включать в себя этапы, чтобы определить скорость целевого SET 110 и выдать скорость запрашивающему SET 114. Конец сеанса скорости SET относительно SET может быть достигнут, например, когда время остановки достигнуто и т.д. После достижения конца сеанса H-SLP 130, запрашивающий SET 114 и целевой SET 110 могут закончить сеанс. H-SLP 130 может послать сообщение SUPL END на целевой SET 110 (этап R). H-SLP 130 может также уведомить запрашивающий SET 114 о конце сеанса, и SET 114 может затем уведомить агента SUPL 144.
[0095] Для простоты ФИГ.9 показывает случай, в котором запрашивающий SET 114 запрашивает скорость одного целевого SET 110. Запрашивающий SET 114 может также запросить скорость множественных целевых терминалов SET. Каждый целевой SET может выполнять обработку, как показано на ФИГ.9, для целевого SET 110.
[0096] В другом исполнении, которое основано на ФИГ.9, запрашивающий SET 114 может определить свою скорость относительно целевого SET 110 посредством обмена сигналов (например, радиосигналов или инфракрасных сигналов) непосредственно с целевым SET 110. Любой SET может измерить задержку распространения сигнала прохождения туда и обратно и может получить расстояние по прямой линии между терминалами SET на основании измерения сигнала. Повторяя измерение сигнала и вычисление расстояния в коротких интервалах, любой SET может получить относительную скорость одного SET относительно другого. Альтернативно, если сигналы, обмениваемые между терминалами SET, включают в себя компонент фиксированной и известной частоты или некоторый маркер в сигнале, который повторяется в фиксированных известных интервалах, то любой SET может получить свою относительную скорость относительно другого SET, измеряя изменение в частоте частотного компонента или периодического маркера. Эта процедура обмена и измерения сигнала может заменить этапы I-L на ФИГ.9 для обоих терминалов SET.
[0097] ФИГ.3 и 6-9 показывают примерные потоки сообщений для различных услуг определения местоположения, используя сообщения SUPL. Потоки сообщений могут быть различны. Например, агент SUPL 140 может запросить H-SLP 130 закончить продолжающийся сеанс. H-SLP 130, SET 110 и/или SET 112 может также решить закончить продолжающийся сеанс. В этих случаях H-SLP 130, SET 110, и SET 112 (если имеется) могут принять меры, чтобы закончить сеанс. Агент SUPL 140, H-SLP 130, SET 110 или SET 112 (если имеется) могут запросить, чтобы услуга сделала паузу. В этом случае при определении позиции и обнаружении событий активатора могут быть сделаны паузы (то есть, не выполнены), пока запрос о возобновлении услуги не будет сделан объектом, запрашивающим паузу.
[0098] Услуги определения местоположения, описанные здесь, могут разрешить агенту SUPL получать информацию местоположения для целевого SET с единственным запросом определения местоположения к H-SLP, вместо того чтобы делать множественные запросы и оценивать результаты. Активированные услуги определения местоположения могут сократить количество запросов определения местоположения и могут значительно уменьшить объем сигнализации и обработки для всех затронутых объектов, таких как агент SUPL, H-SLP и целевой SET.
[0099] ФИГ.10 показывает структуру процесса 1000 для поддержки активированных услуг определения местоположения. Процесс 1000 может быть выполнен терминалом/SET, H-SLP, или некоторым другим объектом. По меньшей мере одно относящееся к определению местоположения измерение для терминала может быть получено (блок 1012). Каждое относящееся к определению местоположения измерение может иметь место для расстояния, пройденного терминалом, или скорости терминала или местоположения терминала относительно движущейся географической целевой области. Имело ли место событие активатора, может быть определено на основании по меньшей мере одного относящегося к измерению определения местоположения для терминала (блок 1014). Сообщение может быть послано, если событие активатора произошло (блок 1016).
[00100] В одном исполнении, для эквидистантно активированной услуги, по меньшей мере одно относящееся к определению местоположения измерение может иметь место для расстояния, пройденного терминалом. Расстояние, пройденное терминалом, может быть определено по-разному. В одном исполнении пройденное расстояние может быть определено посредством (i) периодического определения местоположения терминала и (ii) накопления возрастающих расстояний между последовательными местоположениями терминала, начиная с последнего активированного события (или начала активированного сеанса). В другом исполнении пройденное расстояние может быть определено на основании расстояния между текущим местоположением терминала и начальным местоположением, которое может быть местоположением терминала при последнем событии активатора. В еще одном исполнении пройденное расстояние может быть определено на основании расстояния между текущим местоположением терминала и начальным местоположением вдоль конкретного маршрута. Этот конкретный маршрут может быть вдоль траектории прямой линии или более сложным маршрутом. Расстояние, пройденное терминалом, может быть также определено другими способами. В любом случае, произошло ли событие активатора, может быть определено на основании расстояния, пройденного терминалом. Например, событие активатора может быть объявлено, если расстояние, пройденное терминалом, превышает заранее заданное расстояние.
[00101] В другом исполнении, для SET относительно SET активированной услуги, по меньшей мере одно относящееся к определению местоположения измерение может иметь место для определения местоположения терминала относительно движущейся географической целевой области. Движущаяся географическая целевая область может быть определена на основании местоположения опорного терминала. Например, движущаяся географическая целевая область может быть круговой областью, центрированной в местоположении опорного терминала и имеющей заранее заданный радиус. Имело ли место событие активатора, может быть определено на основании местоположения терминала относительно движущейся географической целевой области. Например, событие активатора может быть объявлено, если местоположение терминала соответствует критерию относительно движущейся географической целевой области. Критерием может быть нахождение внутри, снаружи, вход или выход из движущейся географической целевой области.
[00102] В еще одном исполнении, для активированной скоростью услуги по меньшей мере одно относящееся к определению местоположения измерение для терминала может быть для скорости терминала. Скорость может включать в себя только скорость, или только курс, или и скорость и курс. Имело ли место событие активатора, может быть определено на основании скорости терминала. Например, скорость терминала может периодически определяться. Событие активатора может быть объявлено, если скорость терминала в любое время, начиная с последнего активированного события, удовлетворяет или превышает заранее заданную скорость.
[00103] В еще одном исполнении для услуги, активированной комбинацией T-D-V, по меньшей мере одно относящееся к определению местоположения измерение может иметь место для расстояния, пройденного терминалом, и скорости терминала. Имело ли место событие активатора, может быть определено на основании расстояния, пройденного терминалом, скорости терминала, и/или затраченного времени, начиная с последнего активированного события. Например, множественные выражения могут быть определены. Каждое выражение может быть для расстояния, пройденного терминалом относительно заранее заданного расстояния, или максимальной скорости терминала относительно заранее заданной скорости, или прошедшего времени относительно заранее заданного времени. Имело ли место событие активатора, может быть определено на основании функции множественных выражений.
[00104] ФИГ.11 показывает структуру процесса 1100 для поддержки услуги скорости SET относительно SET. Процесс 1100 может быть выполнен первым терминалом/SET. Первый терминал может послать запрос о скорости второго терминала, например, в центр определения местоположения, такой как H-SLP (блок 1112). Первый терминал может после этого принять скорость второго терминала, например, от центра определения местоположения или непосредственно от второго терминала, не проходя через центр определения местоположения (блок 1114). Первый терминал может принять скорость второго терминала или однократно или множество раз (например, периодически) в ответ на запрос.
[00105] ФИГ.12 показывает блок-схему структуры терминала/SET 110, беспроводной сети 120 и сервера/H-SLP 130 определения местоположения на ФИГ.1. Для простоты ФИГ.12 показывает один или более контроллеров/процессоров 1210, одну память 1212, и один передатчик/приемник (TMTR/RCVR) 1214 для терминала 110, один или более контроллеров/процессоров 1220, одну память 1222, один передатчик/приемник 1224, и один блок связи (Comm) 1226 для беспроводной сети 120, и один или более контроллеров/процессоров 1230, одну память 1232, и один блок связи 1234 для H-SLP 130. В общем случае, каждый объект может включать в себя любое количество процессоров, контроллеров, блоков памяти, передатчиков/приемников, блоков связи и т.д. Терминал 110 может поддерживать связь с одним или более беспроводными и/или проводными сетями. Терминал 110 может также принять и обработать сигналы от одной или более систем позиционирования спутника, например, GPS, Galileo и т.д.
[00106] На нисходящей линии связи беспроводная сеть 120 может передавать данные трафика, сигнализацию и пилот-сигнал на терминалы в пределах ее области охвата. Эти различные типы информации могут быть обработаны процессором(ами) 1220, приведены к требуемым условиям передатчиком 1224 и переданы по нисходящей линии связи. В терминале 110 сигналы нисходящей линии связи от беспроводной сети 120 могут быть приняты и приведены к требуемым условиям приемником 1214 и далее обработаны процессором(ами) 1210, чтобы получить различные типы информации. Процессор(ы) 1210 может выполнять процесс 1000 на ФИГ.10, процесс 1100 на ФИГ.11, и/или другие процессы для способов, описанных здесь. Процессор(ы) 1210 может также выполнить обработку для любого SET на ФИГ.2, 3 и 5-9. Блоки памяти 1212 и 1222 могут хранить коды программ и данные для терминала 110 и беспроводной сети 120, соответственно. По восходящей линии связи терминал 110 может передавать данные трафика, сигнализацию и пилот-сигнал к беспроводной сети 120. Эти различные типы информации могут быть обработаны процессором(ами) 1210, приведены к требуемым условиям передатчиком 1214, и переданы по восходящей линии связи. В беспроводной сети 120 сигналы восходящей линии связи от терминала 110 и других терминалов могут быть приняты и приведены к требуемым условиям приемником 1224 и далее обработаны процессором(ами) 1220, чтобы получить различные типы информации от терминалов. Беспроводная сеть 120 может прямо или косвенно обмениваться с H-SLP 130 через блок 1226 связи.
[00107] В H-SLP 130 процессор(ы) 1230 может выполнять обработку, чтобы поддерживать услуги определения местоположения для терминалов. Например, процессор(ы) 1230 может выполнять процесс 1000 на ФИГ.10 и/или другие процессы для способов, описанных здесь. Процессор(ы) 1230 может также выполнить обработку для H-SLP 130 на ФИГ.2, 3 и 5-9. Процессор(ы) 1230 может также вычислить оценки местоположения для терминала 110, предоставить информацию местоположения агенту SUPL 140 и т.д. Память 1232 может хранить коды программ и данные для H-SLP 130. Блок связи 1234 может разрешить H-SLP 130 обмениваться с беспроводной сетью 120, терминалом 110 и/или другими объектами сети. H-SLP 130 и терминал 110 может обмениваться сообщениями через пользовательскую плоскость (например, SUPL), и эти сообщения могут быть транспортированы беспроводной сетью 120.
[00108] Специалистам понятно, что информация и сигналы могут быть представлены, используя любое множество различных технологий и способов. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементы сигнала, на которые можно ссылаться по вышеупомянутому описанию, могут быть представлены напряжениями, токами, электромагнитными волнами, магнитными полями или частицами, оптическими полями или частицами, или любой их комбинацией.
[00109] Специалистам также понятно, что различные иллюстративные логические блоки, модули, схемы и этапы алгоритмов, описанные применительно к раскрытию, приведенному здесь, могут быть реализованы как электронные аппаратные средства, программное обеспечение или комбинация обоих. Чтобы ясно проиллюстрировать эту взаимозаменяемость аппаратных средств и программного обеспечения, различные иллюстративные компоненты, блоки, модули, схемы и этапы были описаны выше в общем в терминах их функциональных возможностей. Реализованы ли такие функциональные возможности как аппаратные средства или программное обеспечение, зависит от конкретного приложения и ограничений структуры, наложенных на полную систему. Специалисты могут реализовать описанные функциональные возможности множеством способов для каждого конкретного приложения, но такие решения исполнения не должны интерпретироваться как инициирование отхода от объема настоящего описания.
[00110] Способы определения позиции, описанные здесь, могут быть реализованы в различных сетях беспроводной связи, таких как беспроводная глобальная сеть (WWAN), беспроводная локальная сеть (WLAN), беспроводная персональная сеть области (WPAN), и так далее. Термин "сеть" и "система" часто используется взаимозаменяемо. WWAN может быть сетью с множественным доступом с кодовым разделением каналов (CDMA), сетью с множественным доступом с временным разделением каналов (TDMA), сетью с множественным доступом с частотным разделением каналов (FDMA), сетью с множественным доступом с ортогональным частотным разделением каналов (OFDMA), сетью с множественным доступом с частотным разделением каналов и единственной несущей (SC-FDMA), сетью проекта долгосрочного развития (LTE), сетью WiMAX (IEEE 802.16) и так далее. Сеть CDMA может реализовать одну или более технологий радио-доступа (RAT), такие как cdma2000, Широкополосный-CDMA (W-CDMA), и так далее. Cdma2000 включает в себя стандарты IS-95, IS-2000, и IS-856. Сеть TDMA может реализовать Глобальную Систему для Мобильной Связи (GSM), Цифровую усовершенствованную Систему Мобильных телефонов (D-AMPS), или некоторую другую RAT. GSM и W-CDMA описаны в документах от консорциума, названного "проектом партнерства 3-го поколения" (3GPP). Cdma2000 описан в документах от консорциума, названного "проект партнерства 3-го поколения 2" (3GPP2). 3GPP и 3GPP2 документы публично доступны. WLAN может быть IEEE 802.1 сети 1x, и WPAN может быть сетью Bluetooth, IEEE 802.15x, или некоторого другого типа сети. Способы могут также быть реализованы в соединении с любой комбинацией WWAN, WLAN и/или WPAN.
[00111] Спутниковая система позиционирования (SPS) обычно включает в себя систему передатчиков, помещенных, чтобы разрешить объектам определить свое местоположение на или выше Земли, основываясь, по меньшей мере частично, на сигналах, принятых от передатчиков. Такой передатчик обычно передает сигнал, маркированный повторяющимся псевдослучайным шумовым (PN) кодом из набора элементов сигнала, и может быть расположен на основании наземных станций управления, пользовательского оборудования и/или космических транспортных средств. В конкретном примере такие передатчики могут быть расположены на спутниковых транспортных средствах (SV), вращающихся вокруг Земли. Например, SV в совокупности Глобальной Навигационной Спутниковой Системы (GNSS), такой как Глобальная Система Позиционирования (GPS), Galileo, Glonass или Compass может передавать сигнал, маркированный кодом PN, который отличим от кодов PN, переданных другими SV в совокупности (например, используя различные коды PN для каждого спутника как в GPS, или используя один и тот же код на различных частотах, как в Glonass). В соответствии с некоторыми аспектами способы, представленные здесь, не ограничены глобальными системами (например, GNSS) для SPS. Например, описанные способы могут относиться или иначе быть разрешены для использования в различных региональных системах, таких как, например, Квазизенитная Спутниковая Система (QZSS) по Японии, Индийская Региональная Навигационная Спутниковая Система (IRNSS) по Индии, Beidou по Китаю и т.д., и/или различных систем расширения (например, основанная на Спутниковая Система контроля и коррекции (SBAS)), которые могут быть ассоциированы с или иначе разрешены для использования с одной или более глобальными и/или региональными навигационными спутниковыми системами. Посредством примера, но не ограничения, SBAS может включать в себя систему(ы) расширения, которая предоставляет информацию целостности, отличительные коррекции и т.д., такие как, например, Широкозонная усиливающая система (WAAS), Европейская геостационарная дополнительная навигационная система (EGNOS), Многофункциональная спутниковая усиливающая система (MSAS), Навигационная система расширения с помощью GPS Geo или GPS и Geo расширенная навигационная система (GAGAN), и/или аналогичная. Таким образом, как используется здесь, термин SPS может включать в себя любую комбинацию одной или более глобальных и/или региональных навигационных спутниковых систем и/или систем расширения, и сигналы SPS могут включать в себя SPS, SPS-подобные и/или другие сигналы, ассоциированные с такой одной или более SPS.
[00112] Как используется здесь, термин «терминал» относится к устройству, такому как сотовое или другое устройство беспроводной связи, устройство персональной системы связи (PC), персональное навигационное устройство (PND), персональный информационный администратор (PIM), персональный цифровой помощник (PDA), ноутбук или другое подходящее мобильное устройство, которое способно к приему беспроводной связи и/или навигационных сигналов. Термин "терминал" также предназначен, чтобы включать в себя устройства, которые обмениваются с персональным навигационным устройством (PND), таким как радио коротковолновым диапазоном, инфракрасным, проводным соединением, или другим соединением - независимо от того, имеется ли прием спутникового сигнала, прием данных помощи, и/или связанная с позицией обработка в устройстве или в PND. Кроме того, "терминал" предназначен, чтобы включать в себя все устройства, включая устройства беспроводной связи, компьютеры, ноутбуки и т.д. которые способны связываться с сервером, например, через Интернет, Wi-Fi, фемтоячейки, или другую сеть, и независимо от того, имеются ли прием спутникового сигнала, прием данных помощи, и/или связанная с позицией обработка в устройстве, в сервере или в другом устройстве, ассоциированном с сетью. Любую действующую комбинацию вышеупомянутого также считают "терминалом".
[00113] Способы/реализации, описанные здесь, могут быть реализованы различными средствами в зависимости от приложения. Например, они могут быть реализованы в аппаратных средствах, программно-аппаратных средствах, программном обеспечении или любой их комбинации. Для реализации, использующей аппаратные средства, процессоры могут быть реализованы одной или более специализированными интегральными схемами (ASIC), цифровыми сигнальными процессорами (DSP), устройствами обработки цифрового сигнала (DSPD), программируемыми логическими устройствами (PLD), программируемыми пользователем вентильными матрицами (FPGA), процессорами общего назначения, контроллерами, микроконтроллерами, микропроцессорами, конечными автоматами, электронными устройствами, другими электронными блоками, разработанными для выполнения функций, описанных здесь, или их комбинацией, например, одним или более микропроцессорами в соединении с ядром DSP, множеством микропроцессоров, или любой другой подходящей конфигурацией.
[00114] Для реализации, использующей программно-аппаратные средства и/или программное обеспечение, способы могут быть реализованы модулями (например, процедурами, функциями, и так далее), которые выполняют функции, описанные здесь. Любой считываемый машиной носитель, осязаемо воплощающий инструкции, может использоваться в осуществлении способов, описанных здесь. Например, коды программно-аппаратных средств/программного обеспечения могут быть сохранены в памяти и выполнены процессором/компьютером, чтобы заставить процессор/компьютер выполнять функции. Память может быть реализована в процессоре или быть внешней к процессору. Как используется здесь, термин "память" относится к любому типу долговременного, кратковременного, энергозависимой, энергонезависимой или другой памяти и не должен быть ограничен конкретным типом памяти или количеством блоков памяти или типом носителей, на которых сохранена память.
[00115] Если реализованы в программно-аппаратных средствах и/или программном обеспечении, функции могут быть сохранены как один или более инструкций или код на считываемом компьютером носителе. Примеры включают в себя считываемые компьютером носители, кодированные структурой данных и считываемые компьютером носители, закодированные компьютерной программой. Считываемые компьютером носители могут принять форму компьютерного программного продукта. Считываемые компьютером носители включают в себя физические компьютерные носители данных. Носитель данных может быть любым доступным носителем, к которому может получить доступ компьютер. Посредством примера, и не ограничения, такие считываемые компьютером носители могут содержать RAM, ROM, EEPROM, CD-ROM или другое средство хранения на оптическом диске, средство хранения на магнитном диске, средство хранения на полупроводниках или другие устройства хранения, или любой другой носитель, который может использоваться, чтобы сохранить желательный код программы в форме инструкций или структур данных, и к которому может получить доступ компьютер; диск (disk) и диск (disc), как используется здесь, включают в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), дискета и диск Blu-ray, где диски (disks) обычно воспроизводят данные магнитным образом, в то время как диски (discs) воспроизводят данные оптически с помощью лазеров. Комбинации вышеупомянутого должны также быть включены в рамки считываемых компьютером носителей.
[00116] В дополнение к хранению на считываемом компьютером носителе инструкции и/или данные могут быть представлены как сигналы на носителях передачи, включенных в устройство связи. Например, устройство связи может включать в себя приемопередатчик, имеющий сигналы, указывающие инструкции и данные. Инструкции и данные конфигурируются, чтобы заставить один или более процессоров реализовывать функции, описанные в общих чертах в формуле изобретения. Таким образом, устройство связи включает в себя носители передачи с сигналами, указывающими информацию для выполнения раскрытых функций. В первый раз носители передачи, включенные в устройство связи, могут включать в себя первую часть информации, чтобы выполнять раскрытые функции, в то время как во второй раз носители передачи, включенные в устройство связи, могут включать в себя вторую часть информации, чтобы выполнять раскрытые функции.
[00117] Заголовки включены здесь для ссылки и чтобы помочь в определении некоторых секций. Эти заголовки не предназначены, чтобы ограничить область понятий, описанных в них, и эти понятия могут иметь применимость в других секциях всюду по всему описанию.
[00118] Предыдущее описание раскрытия предоставлено, чтобы позволить любому человеку, специалисту в области техники, сделать или использовать раскрытие изобретения. Различные модификации к этому раскрытию будут очевидны для специалиста в данной области техники, и общие принципы, определенные здесь, могут быть применены к другим изменениям, не отступая от объема раскрытия. Таким образом, это раскрытие не предназначено, чтобы быть ограниченным примерами и структурами, описанными здесь, но должно получить самый широкий объем, совместимый с принципами и новыми признаками, раскрытыми в настоящем описании.
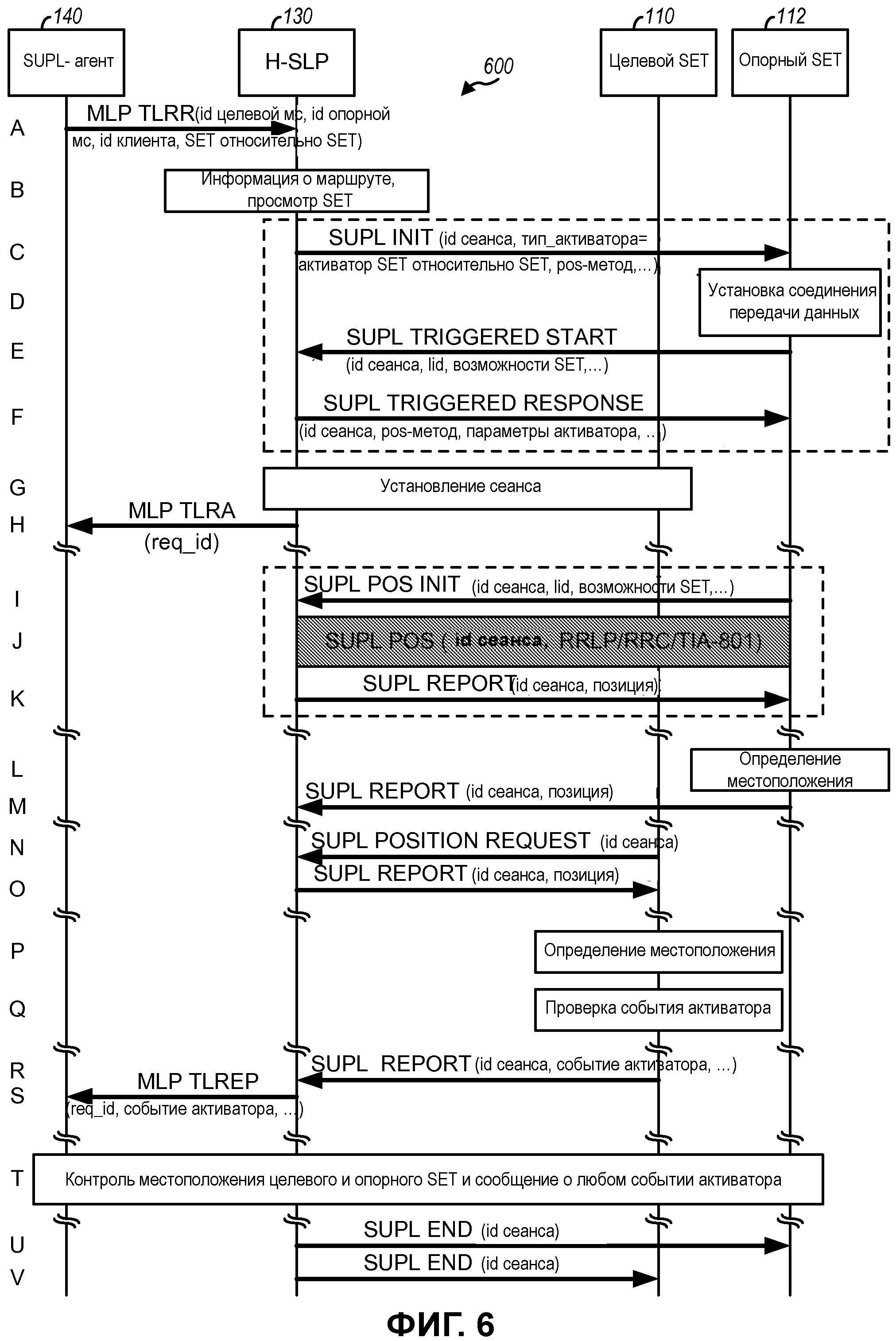
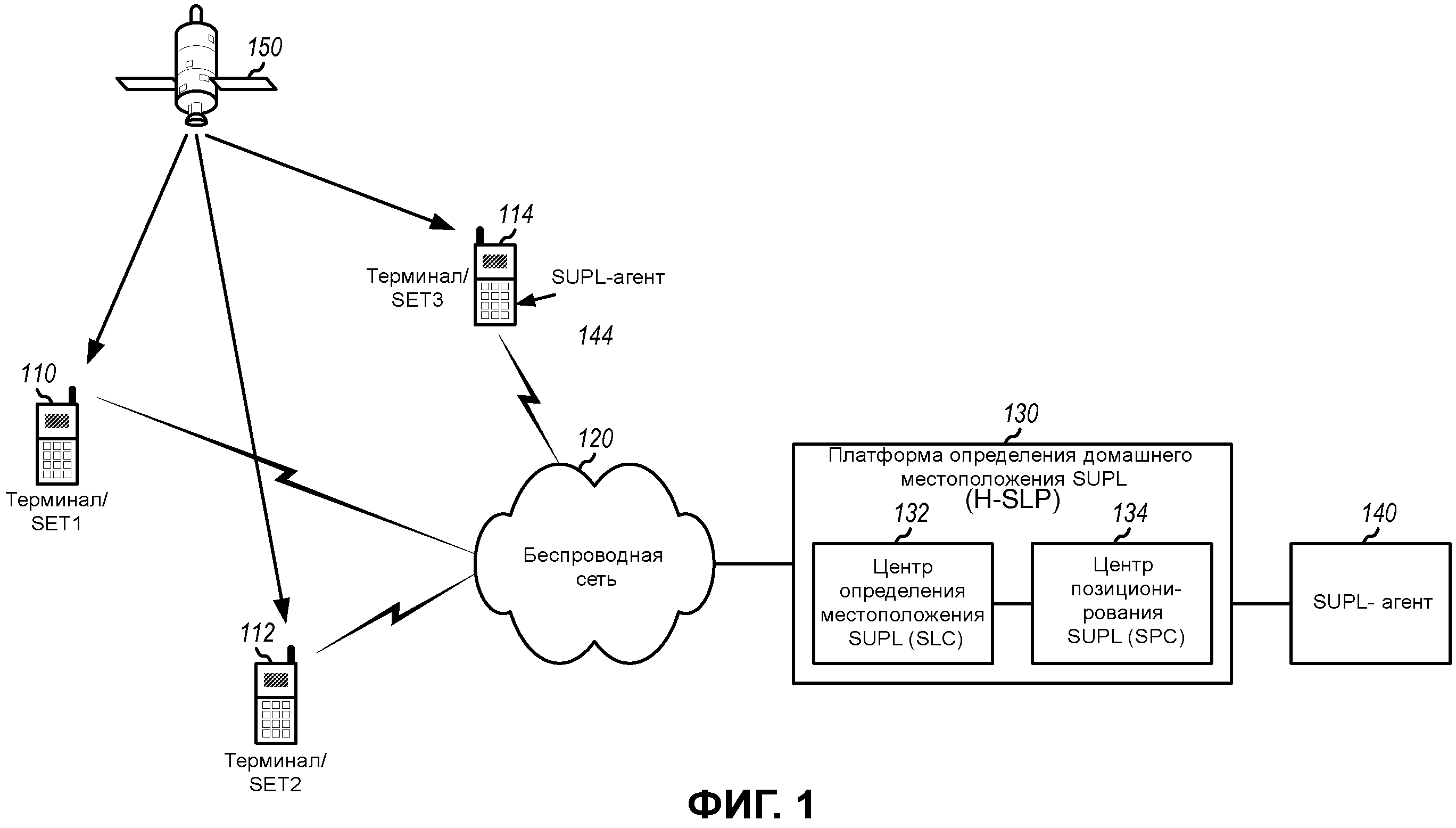
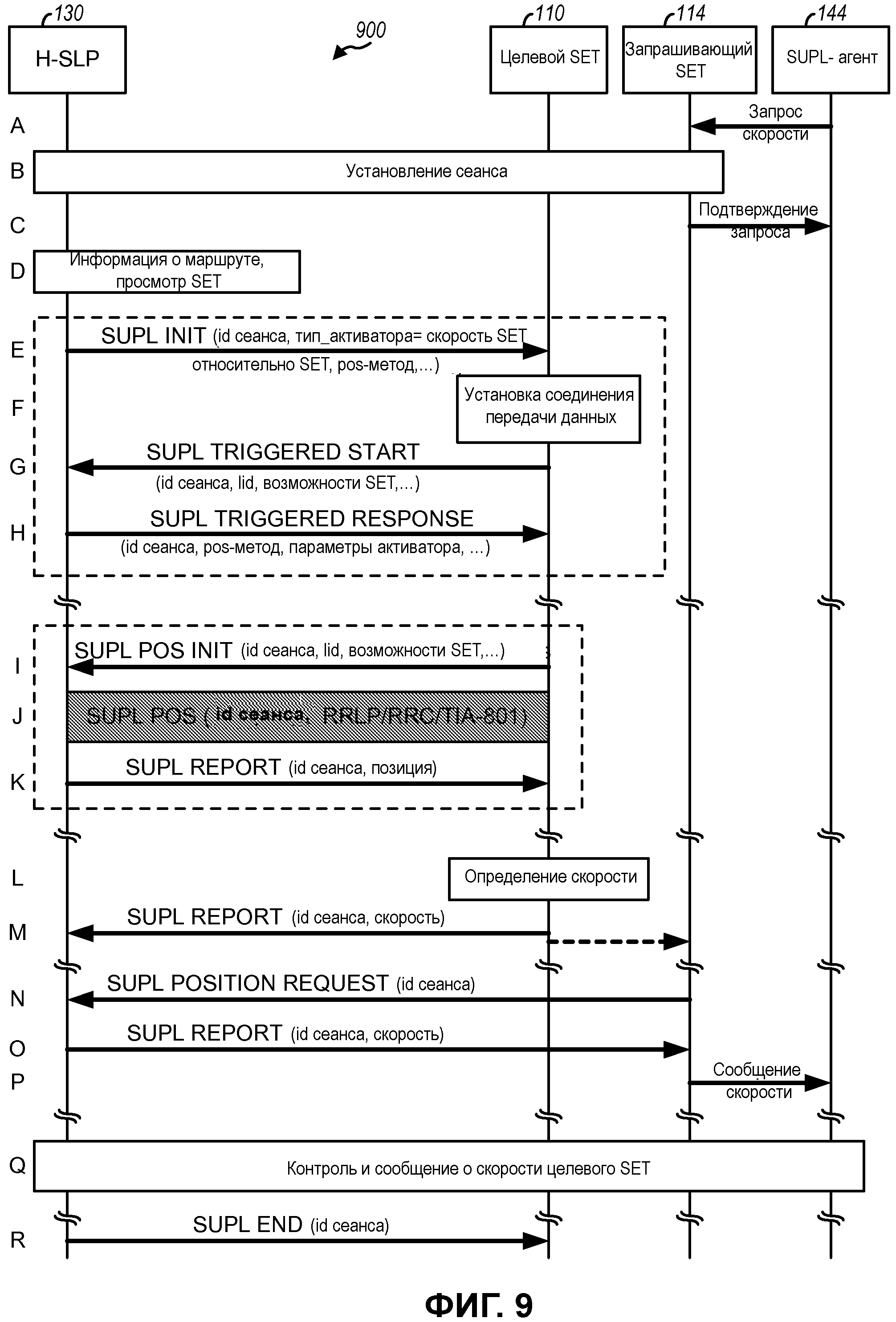
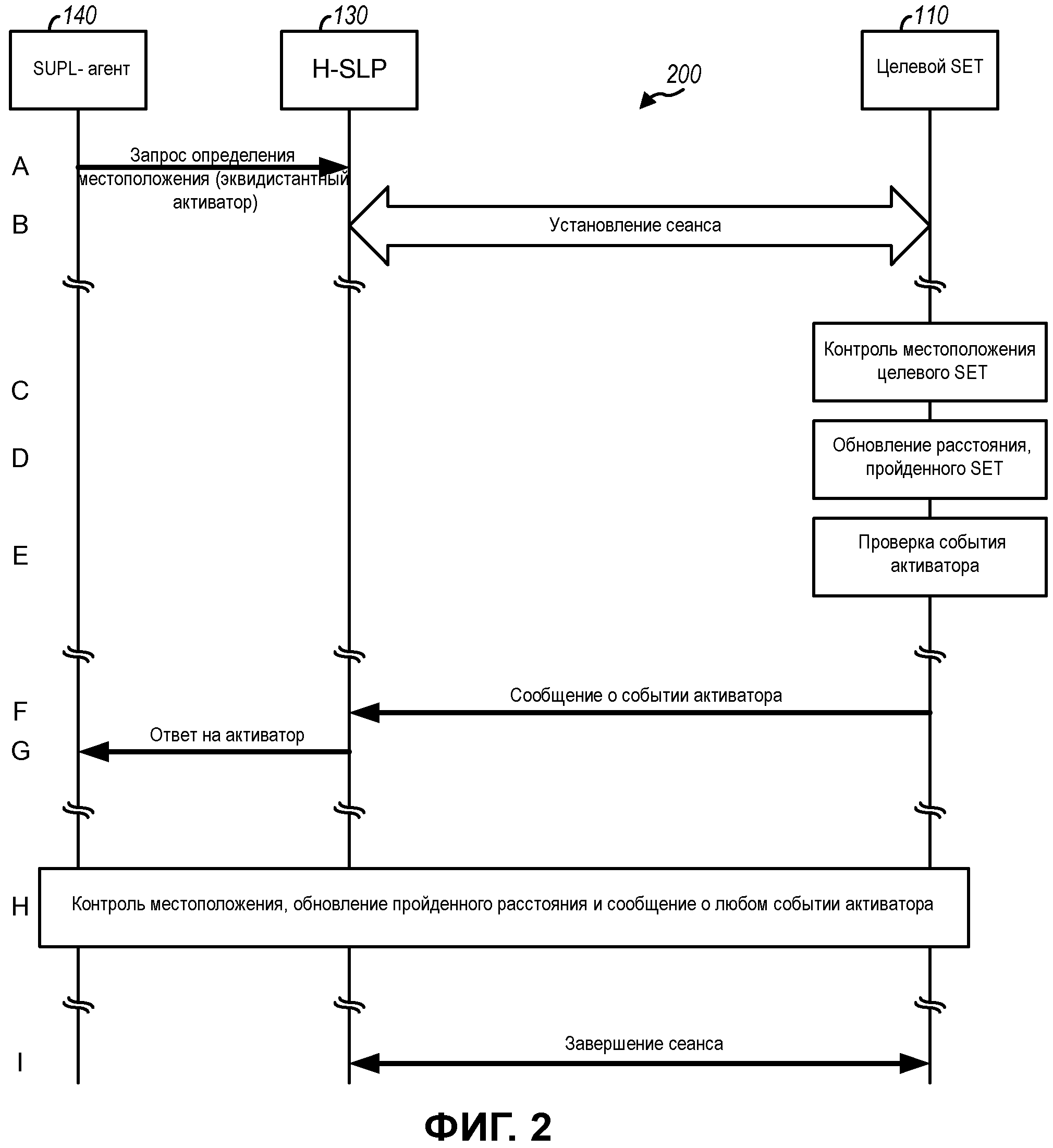
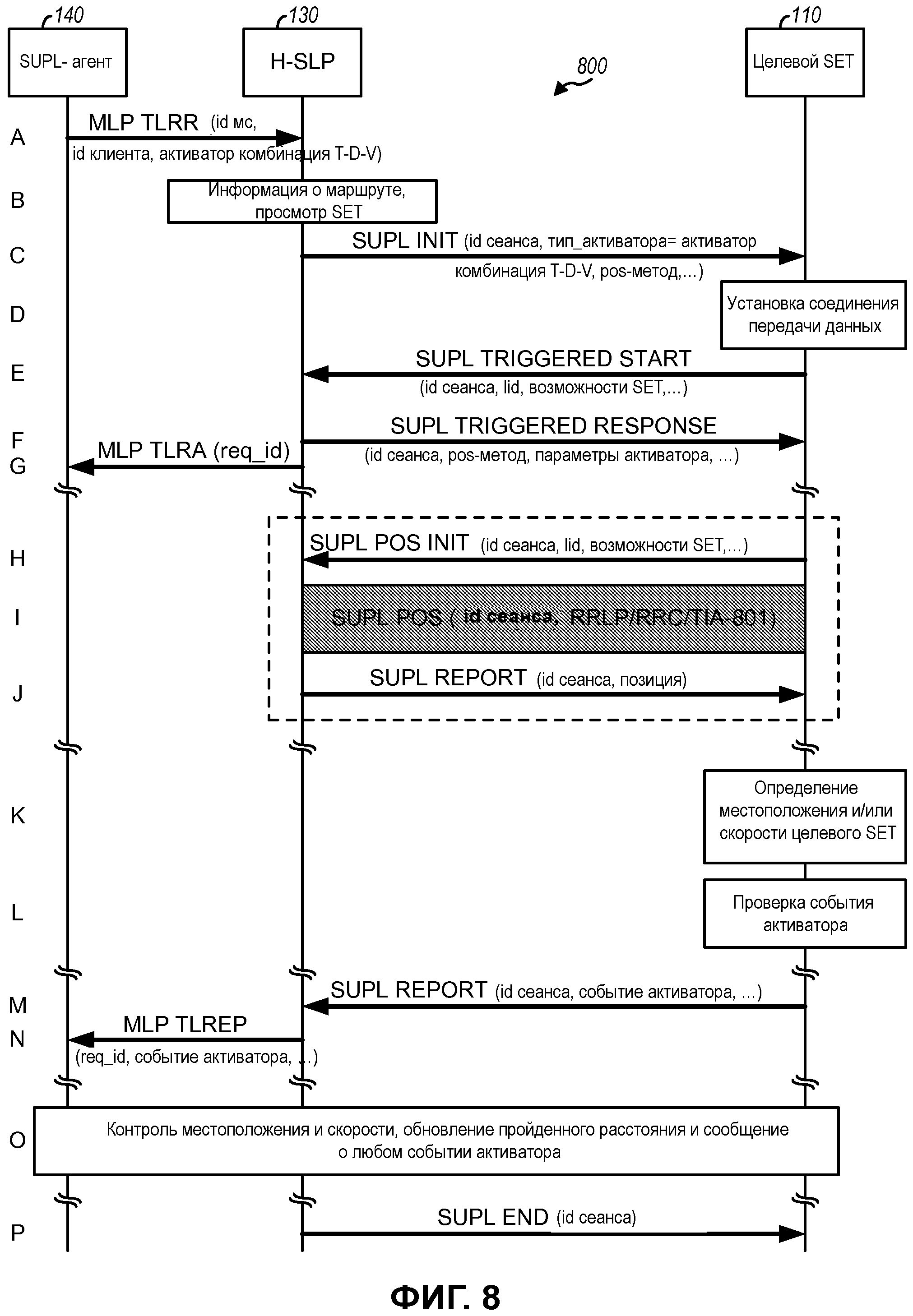
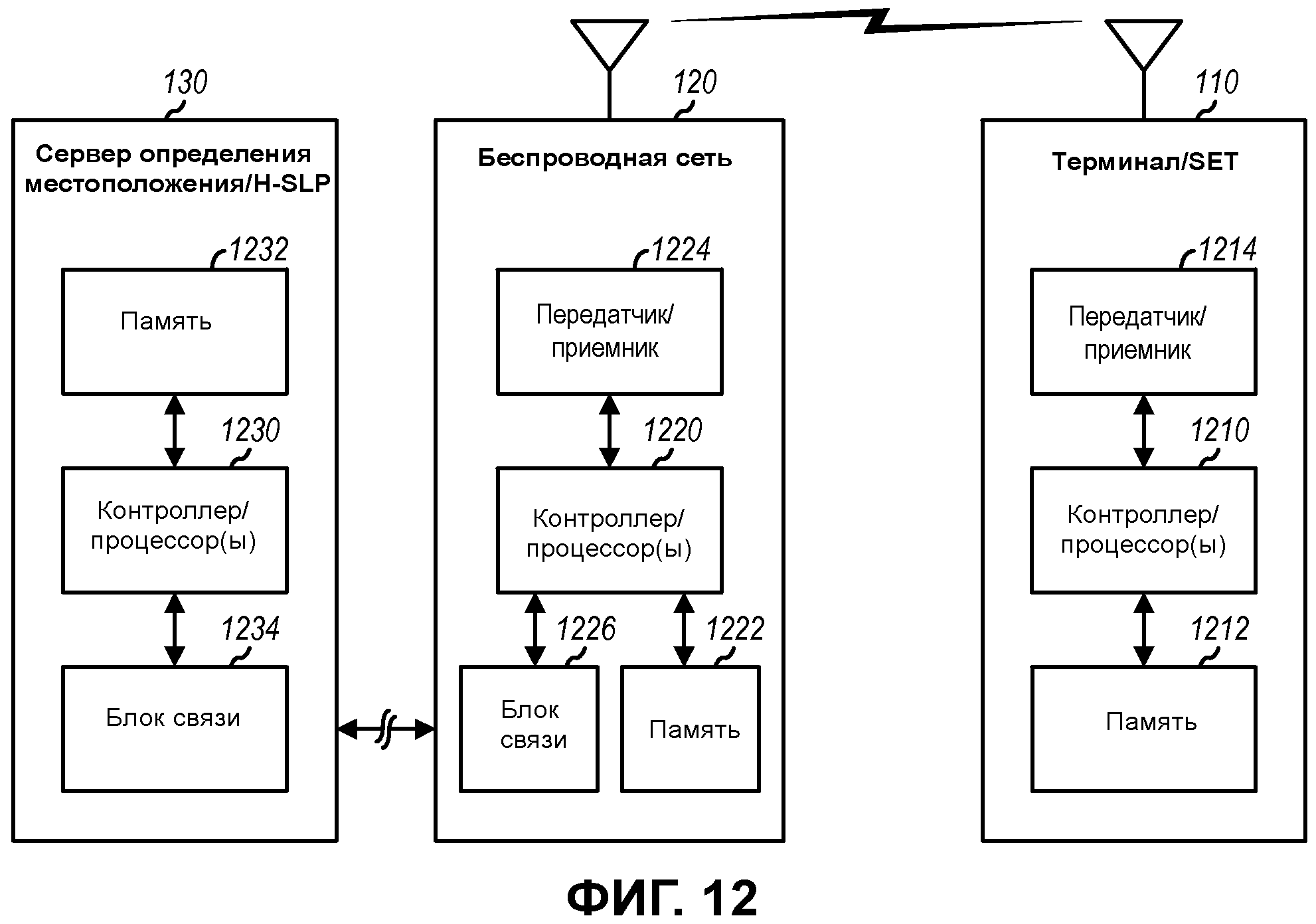
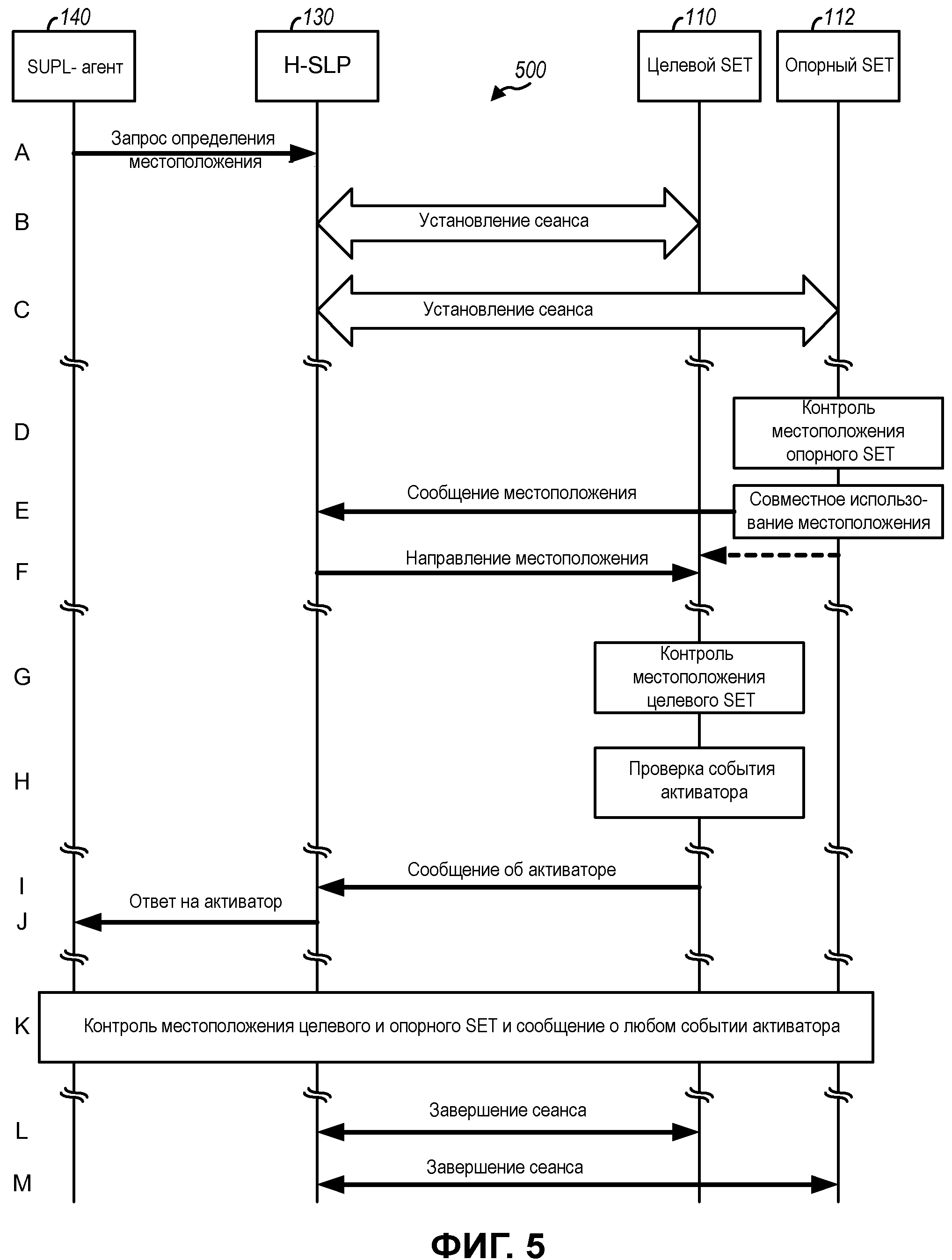
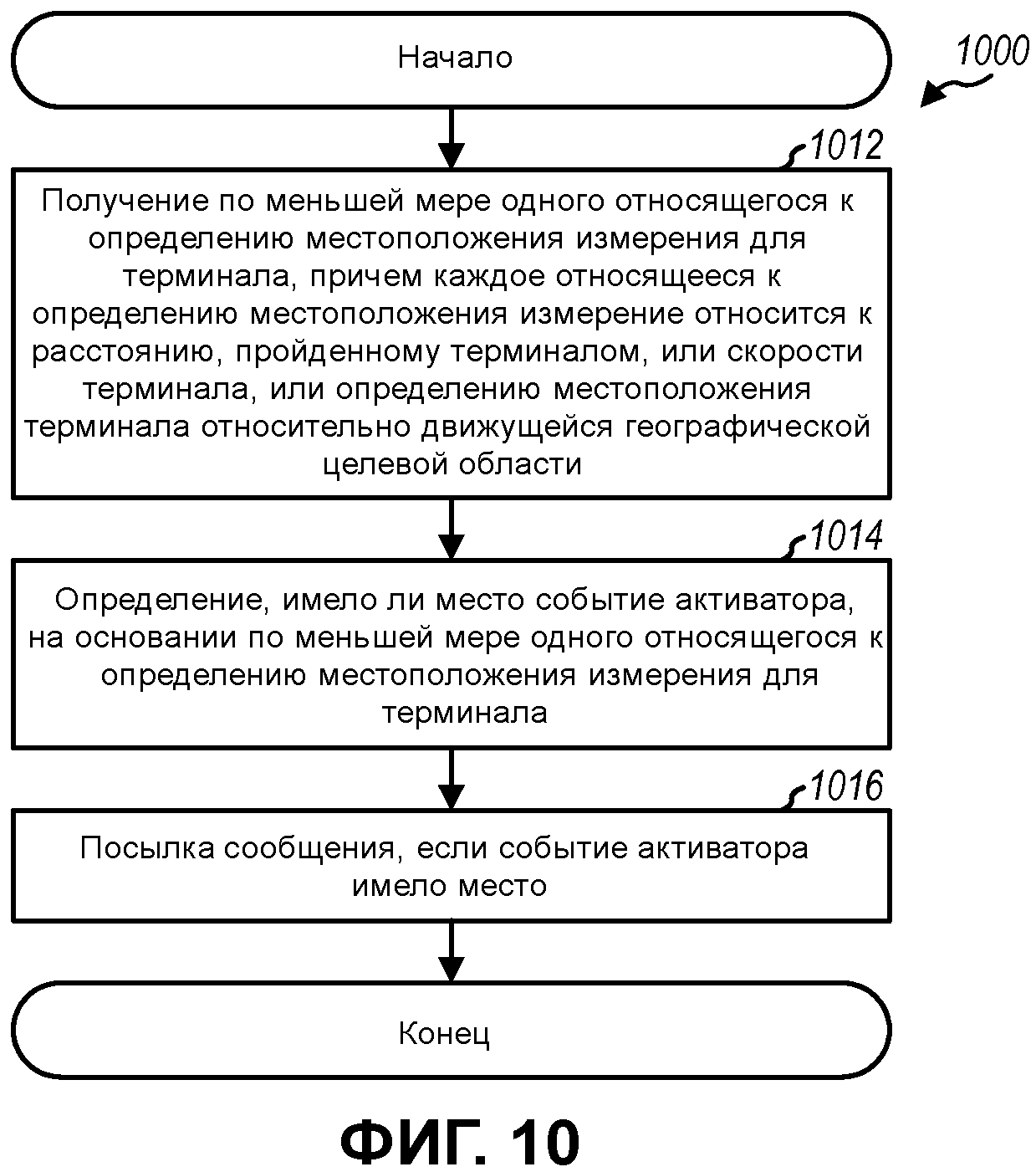
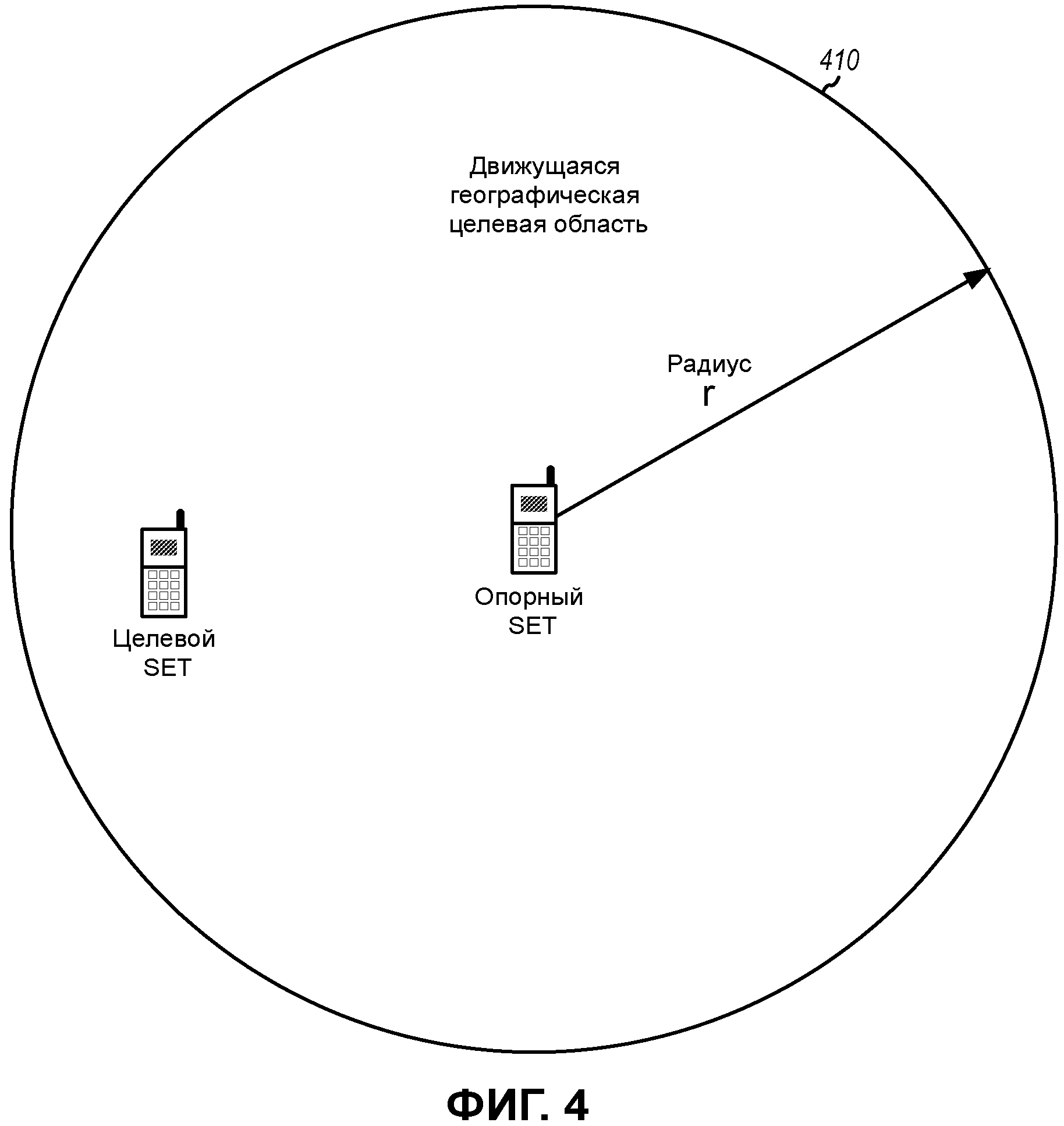
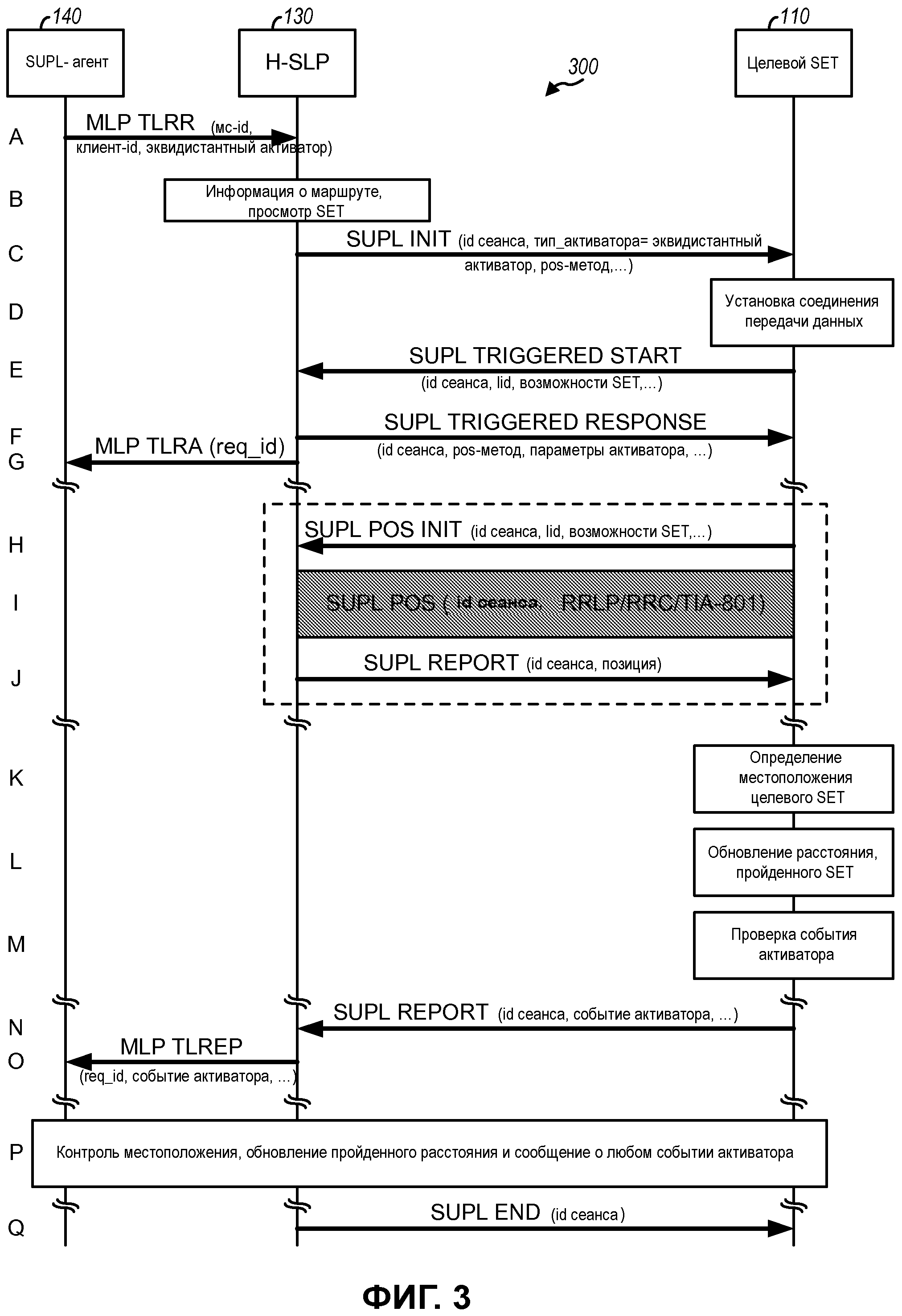
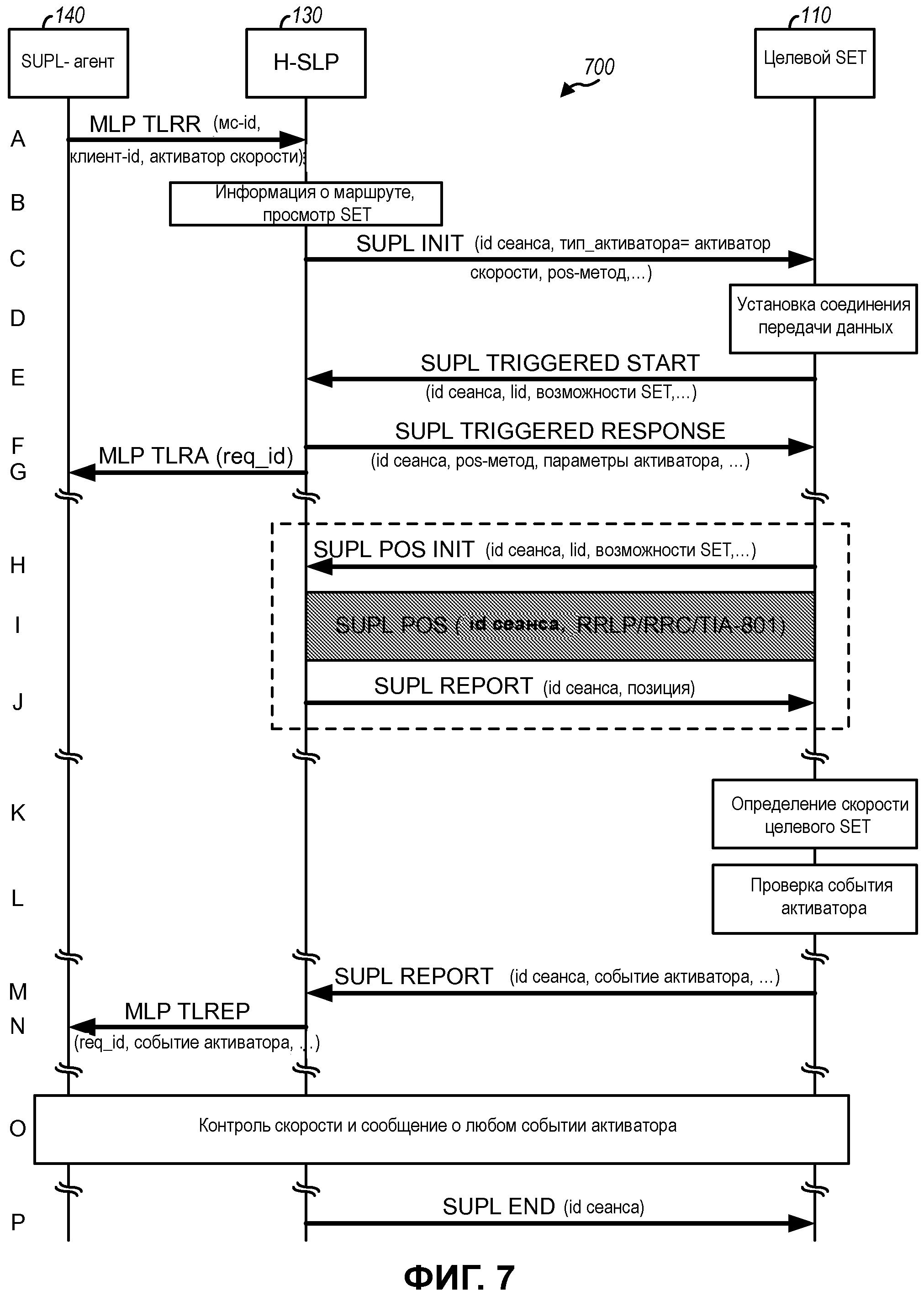
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов
Обнаружение многолучевого распространения для принимаемого sps-сигнала
Способ для указания местоположения и направления элемента графического пользовательского интерфейса
Виртуальное планирование в неоднородных сетях
Кодирование и мультиплексирование управляющей информации в системе беспроводной связи
Система беспроводной связи с конфигурируемой длиной циклического префикса
Способ и устройство для осуществления информационного запроса сеанса для определения местоположения плоскости пользователя
Универсальная корректировка блочности изображения
Основанная на местоположении и времени фильтрация информации широковещания
Способ и устройство для поддержки экстренных вызовов (ecall)
Виртуальная sim-карта для мобильных телефонов

