Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к устройствам управления для бортовых систем стабилизации углового движения летательного аппарата (ЛА) с реализацией на базе цифроаналоговых средств.
Известны способы формирования сигналов управления курсовым движением для систем, которые содержат задающее воздействие, сигналы измерения угла и угловой скорости по курсу, формирование управляющих воздействий на исполнительные приводы ЛА [1, 2].
Известные устройства для реализации таких систем имеют в своем составе задатчик воздействия, измеритель угла, измеритель угловой скорости, сумматор [1, 2].
К недостаткам такой реализации следует отнести ограниченность выбора коэффициента усиления обратной связи по датчику угловой скорости, ограниченность возможностей управления существенно нестационарным объектом.
Наиболее близкими к предлагаемому изобретению являются цифроаналоговый способ формирования сигнала стабилизации для бортовых систем управления угловым движением ЛА, заключающийся в том, что измеряют текущий дискретный сигнал углового положения ЛА по курсу с тактовой частотой fт, измеряют аналоговый сигнал угловой скорости ЛА по курсу, задают дискретный управляющий сигнал, формируют дискретный сигнал рассогласования между текущим дискретным сигналом углового положения по курсу и заданным дискретным управляющим сигналом, усиливают полученный дискретный сигнал рассогласования с коэффициентом К0, усиливают аналоговый сигнал угловой скорости ЛА с коэффициентом К1, преобразуют дискретную компоненту сигнала управления в сигнал аналогового вида, суммируют сигнал дискретной компоненты рассогласования аналогового вида с усиленным аналоговым сигналом угловой скорости [3].
Наиболее близким устройством, реализующим предложенный способ, является устройство, содержащее цифровой измеритель углового положения по курсу, измеритель угловой скорости по курсу, цифровой задатчик параметров, последовательно соединенные цифровой задатчик угла курса, цифровой элемент сравнения, второй вход которого соединен с выходом цифрового измерителя углового положения по курсу и первый цифровой блок умножения, последовательно соединенные цифроаналоговый преобразователь и первый аналоговый сумматор, первый цифроаналоговый блок умножения, первый вход которого соединен с выходом измерителя угловой скорости по курсу, а выход соединен со вторым входом аналогового сумматора [3].
Недостатками известных способа и устройства для его реализации являются ограниченные функциональные возможности и невысокая динамическая точность при управлении существенно нестационарным объектом (ЛА) и дефицит управления при отработке сигналов канала курса, оказывающие значительное влияние на канал крена вследствие наличия перекрестной аэродинамической связи от канала курса, что особенно нежелательно при ограничении угла крена.
Решаемой в предложенном техническом решении технической задачей является расширение функциональных возможностей, повышение динамической точности и восполнение дефицита управления в канале курса существенно нестационарным ЛА. Предложенным решением достигается функциональная возможность повышения интенсивности управления в целом.
Указанный технический результат достигается тем, что в известном способе формирования сигнала управления ЛА, заключающемся в том, что измеряют текущий дискретный сигнал углового положения летательного аппарата с тактовой частотой fт, измеряют аналоговый сигнал угловой скорости летательного аппарата, задают дискретный управляющий сигнал, формируют дискретный сигнал рассогласования между текущим дискретным сигналом углового положения и заданным дискретным управляющим сигналом, усиливают полученный дискретный сигнал рассогласования с коэффициентом К0, усиливают аналоговой сигнал угловой скорости летательного аппарата с коэффициентом К1, преобразуют дискретную компоненту сигнала управления в сигнал аналогового вида, суммируют сигнал дискретной компоненты рассогласования аналогового вида с усиленным аналоговым сигналом угловой скорости, дополнительно формируют сигнал параметрического воздействия для адаптивно перестраиваемых параметров, пропорциональный скоростному напору и обратно пропорциональный текущей массе ЛА, выделяют сигнал дискретной производной сигнала рассогласования с тактовой частотой fт, усиливают сигнал дискретной производной сигнала рассогласования с коэффициентом К2, формируют дискретную компоненту сигнала управления суммированием усиленного дискретного сигнала рассогласования и усиленного сигнала дискретной производной сигнала рассогласования, при этом К2=(0,2÷1,5)К1, фильтруют суммарный сигнал с адаптивно перестраиваемой степенью фильтрации, ограничивают отфильтрованный сигнал и воздействуют ограниченным сигналом на исполнительное устройство ЛА, при этом частота fк изменения коэффициентов К0, К1, К2 составляет fк=(0,1÷0,3)fт, а адаптивно перестраиваемые коэффициенты К0, К1 и К2 и степень фильтрации формируются по обратно пропорциональной зависимости от сигнала параметрического воздействия.
Указанный технический результат достигается и тем, что в известное устройство, содержащее цифровой измеритель углового положения по курсу, измеритель угловой скорости по курсу, цифровой задатчик параметров, последовательно соединенные цифровой задатчик угла курса, цифровой элемент сравнения, второй вход которого соединен с выходом цифрового измерителя углового положения по курсу, и первый цифровой блок умножения, последовательно соединенные цифроаналоговый преобразователь и первый аналоговый сумматор, первый цифроаналоговый блок умножения, первый вход которого соединен с выходом измерителя угловой скорости по курсу, а выход соединен со вторым входом аналогового сумматора, дополнительно введены последовательно соединенные цифровой дифференцирующий элемент, вход которого соединен с выходом цифрового элемента сравнения, второй цифровой блок умножения, и цифровой сумматор, вход которого соединен с выходом первого цифрового блока умножения, а выход - со входом цифроаналогового преобразователя, последовательно соединенные противоизгибный адаптивный апериодический фильтр, первый вход которого соединен с выходом первого аналогового сумматора, и ограничитель сигнала, выход которого является выходом устройства, первый цифровой блок деления, первый вход которого соединен с первым выходом цифрового задатчика параметров, а выход - со вторым входом первого цифрового блока умножения, второй цифровой блок деления, первый вход которого соединен со вторым выходом цифрового задатчика параметров, а выход - со вторым входом первого цифроаналогового блока умножения, третий цифровой блок деления, вход которого соединен с третьим выходом цифрового задатчика параметров, а выход - со вторым входом второго цифрового блока умножения, цифровой задатчик опорных сигналов, последовательно соединенные цифровой измеритель скоростного напора, третий цифровой блок умножения, второй вход которого соединен с первым выходом цифрового задатчика опорных сигналов, и второй цифровой сумматор и последовательно соединенные цифровой измеритель массы ЛА и четвертый цифровой блок деления, второй вход которого соединен со вторым выходом цифрового задатчика опорных сигналов, а выход - со вторым входом второго цифрового сумматора. При этом противоизгибный адаптивный апериодический фильтр содержит последовательно соединенные аналоговый элемент сравнения, вход которого является сигнальным входом фильтра, аналоговый интегратор-усилитель, второй цифроаналоговый блок умножения, сигнальный вход которого соединен с выходом аналогового интегратора-усилителя, цифровой вход - с параметрическим входом фильтра, а выход является выходом фильтра, и третий цифроаналоговый блок умножения, цифровой вход которого соединен с цифровым входом второго цифроаналогового блока умножения, а выход соединен со вторым входом аналогового элемента сравнения.
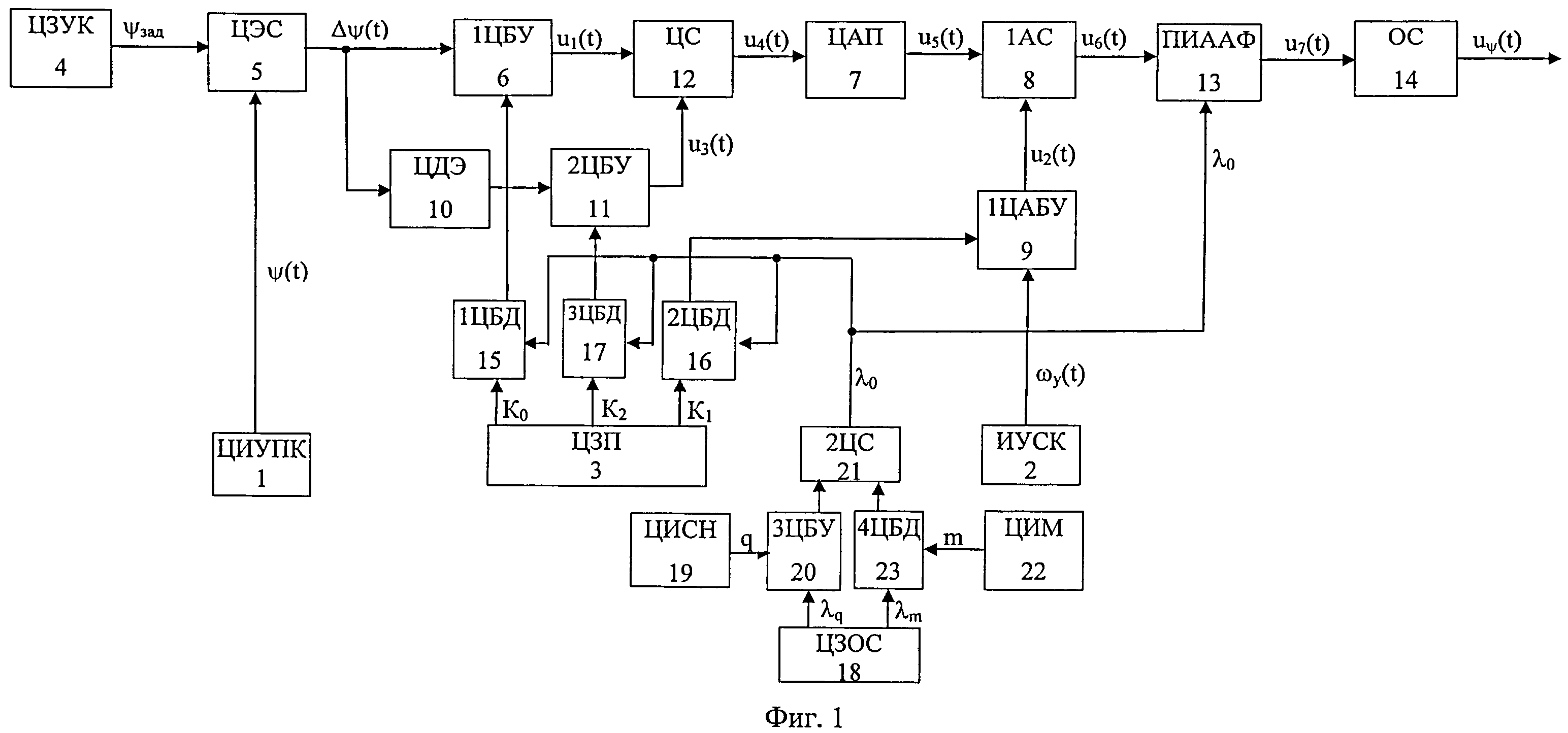
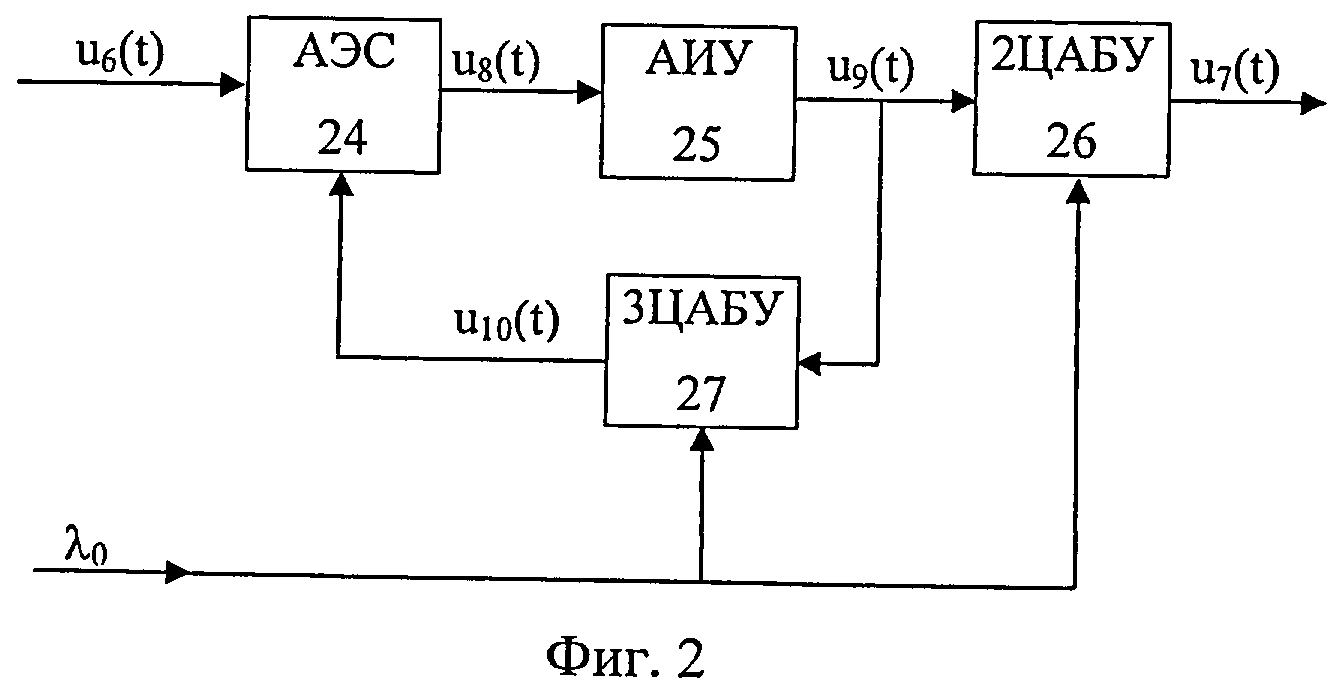
На фиг.1 представлена блок-схема устройства формирования адаптивного цифроаналогового сигнала стабилизации, реализующая предложенный способ; на фиг.2 - блок-схема противоизгибного адаптивного апериодического фильтра.
Устройство формирования цифроаналогового адаптивного сигнала стабилизации углового положения ЛА по курсу содержит цифровой измеритель углового положения по курсу 1 (ЦИУПК), измеритель угловой скорости по курсу 2 (ИУСК), цифровой задатчик параметров 3 (ЦЗП), последовательно соединенные цифровой задатчик угла курса 4 (ЦЗУК), цифровой элемент сравнения 5 (ЦЭС), второй вход которого соединен с выходом цифрового измерителя углового положения по курсу 1, и первый цифровой блок умножения 6 (1ЦБУ), последовательно соединенные цифроаналоговый преобразователь 7 (ЦАП) и первый аналоговый сумматор 8 (АС), первый цифроаналоговый блок умножения 9 (1ЦАБУ), первый вход которого соединен с выходом измерителя угловой скорости по курсу 2, а выход соединен со вторым входом аналогового сумматора 8, последовательно соединенные цифровой дифференцирующий элемент 10 (ЦДЭ), вход которого соединен с выходом цифрового элемента сравнения 5, второй цифровой блок умножения 11 (2ЦБУ), и цифровой сумматор 12 (ЦС), вход которого соединен с выходом первого цифрового блока умножения 6, а выход - со входом цифроаналогового преобразователя 7, последовательно соединенные противоизгибный адаптивный апериодический фильтр 13 (ПААФ), первый вход которого соединен с выходом первого аналогового сумматора 8, и ограничитель сигнала 14 (ОС), выход которого является выходом устройства, первый цифровой блок деления 15 (1ЦБД), первый вход которого соединен с первым выходом цифрового задатчика параметров 3, а выход - со вторым входом первого цифрового блока умножения 6, второй цифровой блок деления 16 (2ЦБД), первый вход которого соединен со вторым выходом цифрового задатчика параметров 3, а выход - со вторым входом первого цифроаналогового блока умножения 9, третий цифровой блок деления 17 (ЗЦБД), вход которого соединен с третьим выходом цифрового задатчика параметров 3, а выход - со вторым входом второго цифрового блока умножения 11, цифровой задатчик опорных сигналов 18 (ЦЗОС), последовательно соединенные цифровой измеритель скоростного напора 19 (ЦИСН), третий цифровой блок умножения 20 (ЗЦБУ), второй вход которого соединен с первым выходом цифрового задатчика опорных сигналов 18, и второй цифровой сумматор 21 (2ЦС) и последовательно соединенные цифровой измеритель массы ЛА 22 (ЦИМ) и четвертый цифровой блок деления 23 (4ЦБД), второй вход которого соединен со вторым выходом цифрового задатчика опорных сигналов 18, а выход - со вторым входом второго цифрового сумматора 21. Противоизгибный адаптивный апериодический фильтр 13 содержит последовательно соединенные аналоговый элемент сравнения 24 (АЭС), вход которого является сигнальным входом фильтра, аналоговый интегратор-усилитель 25 (АИУ), второй цифроаналоговый блок умножения 26 (2ЦАБУ), сигнальный вход которого соединен с выходом аналогового интегратора-усилителя 25, его второй вход (цифровой) - с параметрическим входом фильтра, а выход является выходом фильтра, и третий цифроаналоговый блок умножения 27 (ЗЦАБУ), цифровой вход которого соединен с цифровым входом второго цифроаналогового блока умножения 26 (2ЦАБУ), а выход соединен со вторым входом аналогового элемента сравнения 24.
Устройство формирования цифроаналогового адаптивного сигнала стабилизации углового положения ЛА по курсу, реализующее предложенный способ, работает следующим образом.
Измеритель 1 измеряет текущий дискретный сигнал угла курса ЛА ψ(t) с тактовой частотой fт. Измеритель 2 измеряет аналоговый сигнал угловой скорости по курсу ωy(t) ЛА. Дискретный цифровой управляющий сигнал ψзад задается задатчиком 4. Цифровой элемент сравнения 5 формирует дискретный сигнал рассогласования между текущим дискретным сигналом углового положения и заданным дискретным управляющим сигналом

Полученный дискретный сигнал рассогласования Δψ(t) в блоке 6 усиливается с коэффициентом К0(λ0). Получаем компоненту сигнала управления

где λ0 - сигнал параметрического воздействия для адаптации коэффициента К0(λ0), также как и для указанных далее коэффициентов К1(λ0) и К2(λ0) и постоянной времени фильтра 13 Тф(λ0). Параметрический сигнал λ0 формируется в изменяющихся условиях полета в зависимости от скоростного напора q измерителя 19 и массы m ЛА измерителя 22.
А именно, λ0 формируется в виде:
где λq и λm - весовые коэффициенты, выставленные в блоке 18.
Компонента λq·q вычисляется в блоке 20, компонента  - в блоке 23. Сигнал λ0 по (3) сформирован в сумматоре 21. Таким образом, К0(λ0)=К0/λ0, где К0 - базовый коэффициент с постоянным значением, определенный в блоке 3.
- в блоке 23. Сигнал λ0 по (3) сформирован в сумматоре 21. Таким образом, К0(λ0)=К0/λ0, где К0 - базовый коэффициент с постоянным значением, определенный в блоке 3.
Аналоговый сигнал угловой скорости ωy(t) от измерителя 2 усиливается с коэффициентом К1(λ0) в блоке 9 по информации блоков 3 и 16. Получают демпфирующую аналоговую компоненту

где К1(λ0)=К1/λ0, коэффициент К1 в виде постоянной величины выставлен в блоке 3.
Дискретная компонента сигнала управления по рассогласованию u4(t) преобразуется цифроаналоговым преобразователем 7 в сигнал аналогового вида u5(t), например, на основе эктраполятора 0-го порядка [2]. Сигнал u5(t) суммируется с сигналом u2(t) в сумматоре 8. Получают сигнал u6(t).

Полученный суммарный сигнал u6(t) поступает на противоизгибный адаптивный апериодический фильтр 13 для отстройки от изгибных колебаний ЛА и далее в виде сигнала u7(t) на ограничитель сигнала 14. Ограничитель сигнала 14 определяет распределение ряда сигналов управления, задействующих общие рулевые приводы. Для рассматриваемого канала курса это будет выходной сигнал uψ(t). В рассматриваемом устройстве выделяют сигнал дискретной производной сигнала рассогласования с тактовой частотой fт в блоке 10, например, на основе вычисления скорости приращения сигнала рассогласования

где i - i-й шаг, Тт=1/fт.
Полученный сигнал дискретной производной сигнала рассогласования  усиливают с коэффициентом К2(λ0) блока 11, то есть получают сигнал
усиливают с коэффициентом К2(λ0) блока 11, то есть получают сигнал

где К2(λ0)=К2/λ0, коэффициент К2 в виде постоянной величины выставлен в блоке 3.
Дискретную компоненту сигнала управления u4(t) получают суммированием усиленного дискретного сигнала рассогласования u1(t) и усиленного сигнала дискретной производной сигнала рассогласования u3(t), то есть

Формирование дополнительной, цифровой компоненты сигнала управления и соответствующего канала вызвано недостаточностью в реальных цифроаналоговых преобразователях уровня коэффициента демпфирования ρ, что влечет в том числе и возникновение дефицита управления.
Степень усиления сигнала производной сигнала рассогласования К2 составляет (0,2÷1,5) степени усиления аналогового сигнала угловой скорости летательного аппарата К1; частота fк изменения параметра λ0 и коэффициентов К0, К1, К2 соответствует скорости изменения динамических коэффициентов ЛА и составляет fк=(0,1÷0,3)fт.
Реализация закона адаптации постоянной времени Тф(λ0) фильтра 13 представлена на фиг.2 и реализована блоками 24, 25, 26, 27. Интегратор-усилитель 25 имеет передаточную функцию:
W=U9/U8=Ku/p,
где Ku - коэффициент усиления интегратора.
Обратная связь u10(t) сформирована посредством цифроаналогового блока умножения 27 с передаточной функцией W=U10/U9=λ0 и элемента сравнения 24, выход которого

Передаточная функция блока 26 также равна λ0.
Передаточная функция фильтра в целом Wф(p) имеет вид:
где  , что определяет адаптивную перестройку постоянной времени фильтра: Ku=const, λ0=f(q, m) в соответствии с (3).
, что определяет адаптивную перестройку постоянной времени фильтра: Ku=const, λ0=f(q, m) в соответствии с (3).
Все функции формирования сигнала управления могут быть реализованы на элементах автоматики и вычислительной техники [4] и программно-алгоритмически.
Предложенное решение позволяет расширить функциональные возможности системы и повысить динамическую точность управления в условиях существенной нестационарности характеристик ЛА, т.е. в широком диапазоне изменения высот, скоростей полета и массы.
Источники информации
1. И.А. Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с.174.
2. Б. Куо. Теория и проектирование цифровых систем управления. - М.: Машиностроение, 1986 г., с.32-36, 63.
3. Патент №2367992 от 20.09.2009 г., МПК G05D 1/00.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981 г., с.121.
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла

