Результат интеллектуальной деятельности: СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к устройствам управления для бортовых систем управления угловым движением беспилотных летательных аппаратов (ЛА) в широком диапазоне высот и скоростей полета при действии интенсивных внешних возмущений, таких как ветровые порывы, интерференционные динамические воздействия при отходе от носителя и др.
Известен способ формирования сигнала управления, заключающийся в том, что задают сигнал управления, измеряют сигнал текущего углового положения, измеряют сигнал текущей угловой скорости и формируют на их основе управляющее воздействие для рулевых приводов ЛА [1].
Известно устройство управления угловым движением ЛА, в котором канал управления содержит задающее устройство для формирования задающих сигналов, датчики углов и угловых скоростей для измерения текущих угловых координат, блоки управления на их основе [1].
Недостатком такой реализации является ограниченность передаточных чисел реальных аналоговых элементов и, в частности, по обратной связи от угловой скорости, что ограничивает возможности управления в широком диапазоне высот и скоростей полета в условиях интенсивных внешних воздействий.
Наиболее близким по технической сущности решением является способ формирования сигнала управления угловым движением ЛА, заключающийся в том, что задают сигнал управления, измеряют сигнал текущего углового положения, измеряют сигнал текущей угловой скорости, сравнивают заданный сигнал управления с сигналом текущего углового положения, усиливают полученные сигнал сравнения и сигнал текущей угловой скорости, формируют предварительный сигнал суммирования усиленных сигналов сравнения и угловой скорости, фильтруют суммарный сигнал и ограничивают отфильтрованный сигнал, полученный ограниченный сигнал является выходным сигналом управления [2].
Наиболее близким устройством, реализующим предложенный способ, является устройство формирования сигнала управления угловым движением ЛА, содержащее последовательно соединенные задатчик сигнала управления, элемент сравнения, первый усилитель, сумматор, фильтр и ограничитель сигнала, выход которого является выходом устройства, датчик угла, выход которого соединен со вторым входом элемента сравнения, последовательно соединенные датчик угловой скорости и второй усилитель, выход которого соединен со вторым входом сумматора [2].
Недостатками способа и устройства для его реализации являются ограниченные функциональные возможности и невысокая динамическая точность управления в широком диапазоне условий полета ЛА и внешних возмущений.
Решаемой в предложенных способе и устройстве технической задачей является расширение функциональных возможностей и повышение динамической точности управления. Предложенным формированием сигнала управления и построением устройства управления достигается функциональная возможность достижения существенного повышения точности управления нестационарным ЛА при действии интенсивных внешних возмущений.
Указанный технический результат по достигается тем, что в известной способ формирования сигнала управления угловым движением нестационарного ЛА, заключающийся в том, что задают сигнал управления, измеряют сигнал текущего углового положения, измеряют сигнал текущей угловой скорости, сравнивают заданный сигнал управления с сигналом текущего углового положения, усиливают полученные сигнал сравнения и сигнал текущей угловой скорости, формируют предварительный сигнал суммирования усиленных сигналов сравнения и угловой скорости, фильтруют суммарный сигнал и ограничивают отфильтрованный сигнал, полученный ограниченный сигнал является выходным сигналом управления, дополнительно измеряют текущий сигнал скоростного напора, задают сигнал критического значения скоростного напора, сравнивают текущий сигнал скоростного напора с сигналом критического значения, формируют сигнал дополнительной компоненты угловой скорости при текущем сигнале скоростного напора меньше критического значения посредством масштабирования сигнала угловой скорости и формируют суммарный сигнал посредством суммирования предварительного суммарного сигнала с сигналом дополнительной компоненты.
Указанный технический результат достигается также и тем, что в известное устройство формирования сигнала управления угловым движением ЛА, содержащее последовательно соединенные задатчик сигнала управления, элемент сравнения, первый усилитель, сумматор, фильтр и ограничитель сигнала, выход которого является выходом устройства, датчик угла, выход которого соединен со вторым входом элемента сравнения, последовательно соединенные датчик угловой скорости и второй усилитель, выход которого соединен со вторым входом сумматора, дополнительно введены последовательно соединенные датчик скоростного напора, логический элемент сравнения, управляемый ключ, второй вход которого соединен с выходом датчика угловой скорости, и третий усилитель, выход которого соединен с третьим входом сумматора, и задатчик критического значения скоростного напора, выход которого соединен со вторым входом логического элемента сравнения.
Действительно, при этом обеспечивается максимальная отработка угла курса в широком диапазоне высот и скоростей полета ЛА при наличии интенсивных внешних возмущений. В первую очередь к таковым относятся интерференционные воздействия при отделении ЛА от носителя.
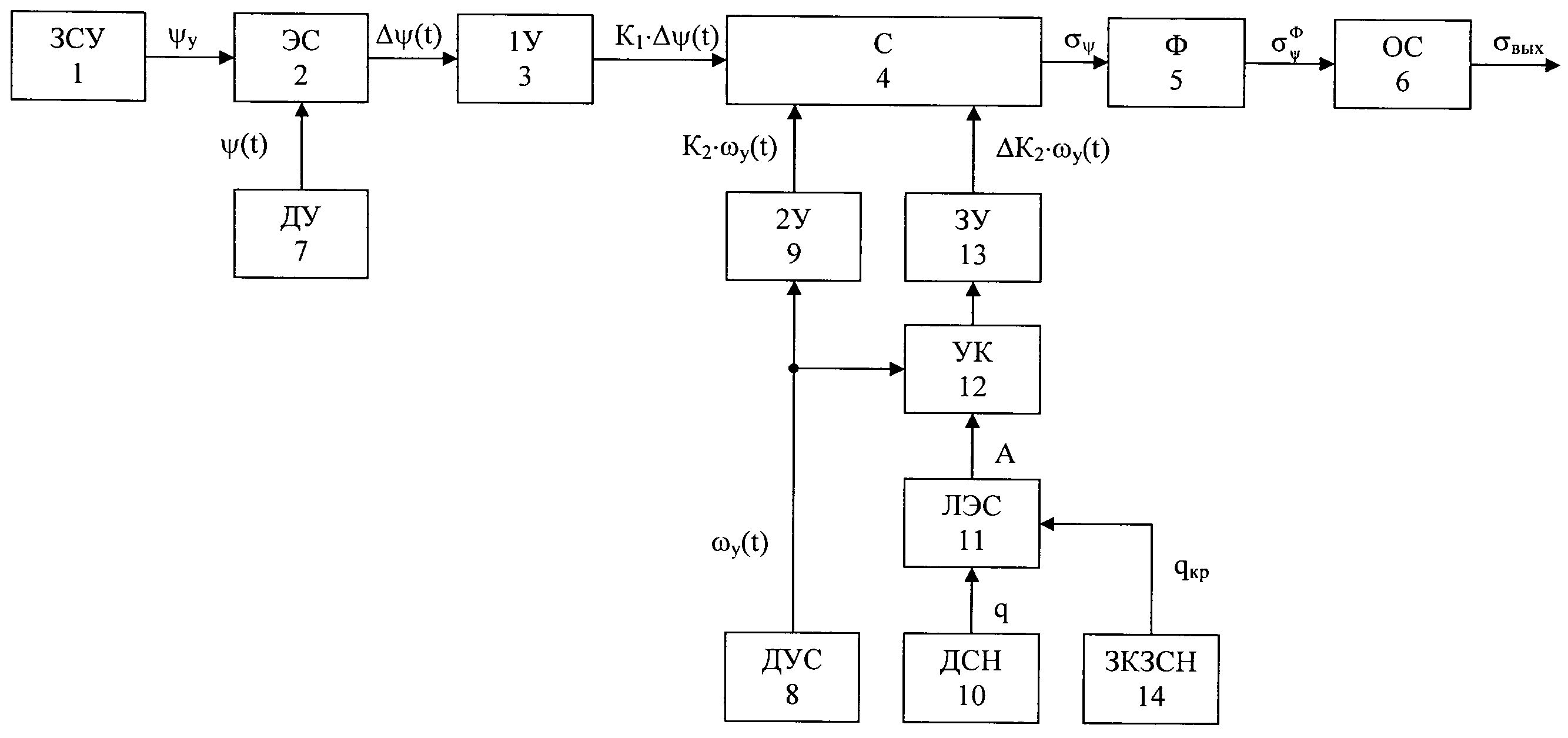
На чертеже представлена структурная схема устройства формирования сигнала управления угловым движением ЛА с реализацией предложенного способа.
Устройство формирования сигнала управления угловым движением ЛА содержит последовательно соединенные задатчик сигнала управления 1 (ЗСУ), элемент сравнения 2 (ЭС), первый усилитель 3 (1У), сумматор 4 (С), фильтр 5 (Ф) и ограничитель сигнала 6 (ОС), выход которого является выходом устройства, датчик угла 7 (ДУ), выход которого соединен со вторым входом элемента сравнения 2, последовательно соединенные датчик угловой скорости 8 (ДУС) и второй усилитель 9 (2У), выход которого соединен со вторым входом сумматора 4. Кроме того, для достижения поставленной цели устройство содержит последовательно соединенные датчик скоростного напора 10 (ДСН), логический элемент сравнения 11 (ЛЭС), управляемый ключ 12 (УК), второй вход которого соединен с выходом датчика угловой скорости 8, и третий усилитель 13 (ЗУ), выход которого соединен с третьим входом сумматора 4, и задатчик критического значения скоростного напора 14 (ЗКЗСН), выход которого соединен со вторым входом логического элемента сравнения 11. Эта часть устройства реализует формирование сигнала дополнительной компоненты с ее целенаправленным функционально-логическим введением.
Устройство формирования сигнала управления угловым движением ЛА с реализацией способа работает следующим образом.
Базовый сигнал управления σψ1 формируется блоками 1, 2, 3, 4, 7, 8, 9:


где K1, K2 - передаточные коэффициенты первого и второго усилителей 3 и 9, соответственно;
Δψ(t) - сигнал углового рассогласования на выходе элемента сравнения 2;
ψ(t) - сигнал датчика угла 7;
ψy - задающий сигнал на выходе задатчика сигнала управления 1;
ωy(t) - сигнал датчика угловой скорости 8.
Сформированный по (1) базовый сигнал σψ1 дополняется сигналом ΔK2·ωy(t), то есть полный сигнал σψ с выхода сумматора 4 составляет:

где ΔK2 - дополнительный коэффициент усиления по угловой скорости, выставленный в третьем усилителе 13.
Сигнал дополнительной компоненты ΔK2·ωy(t) поступает в сумматор 4 при замыкании управляемого ключа 12.
Управляющий сигнал А для замыкания ключа 12 формируется логическим элементом 11 сравнением текущего скоростного напора q от датчика 10 с критическим значением qкр, выставляемым в задатчике 14, и определяющим необходимость введения сигнала дополнительной компоненты управления.
Условие замыкания ключа 12:

где q=ρ·V2/2;
ρ - плотность воздуха на текущей высоте;
V - скорость полета ЛА.
Действительно, при относительно малых величинах скоростного напора имеет место и малая величина эффективности рулевых органов [1, 3], вследствие чего проявление возмущающих факторов жестче, что приводит к ухудшению качества процессов и даже к потере устойчивости. Эффективным приемом является повышение устойчивости контура управления посредством увеличения передаточного коэффициента по сигналу угловой скорости, обеспечивающим удаление от границы области устойчивости. Здесь это величина ΔK2. Таким образом определен положительный эффект, поставленный технической задачей.
Представленный на чертеже фильтр 5 решает задачу фильтрации базового сигнала σψ от упругих колебаний ЛА, то есть формируется отфильтрованный сигнал  , который ограничивается ограничителем сигнала 6, выходной сигнал с которого σвых является выходным сигналом устройства, поступающим на рулевой привод ЛА. Ограничение предусмотрено с целью задействования смежных каналов на общий рулевой привод.
, который ограничивается ограничителем сигнала 6, выходной сигнал с которого σвых является выходным сигналом устройства, поступающим на рулевой привод ЛА. Ограничение предусмотрено с целью задействования смежных каналов на общий рулевой привод.
Все функции устройства могут быть реализованы на элементах автоматики и вычислительной техники [4] и программно-алгоритмически.
Таким образом, предложенное решение позволяет расширить функциональные возможности устройства, повысить динамическую точность управления и устойчивость в условиях интенсивных внешних воздействий ЛА.
Источники информации.
1. И.А. Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с.174.
2. Патент №2367992 от 20.09.2009 г., МПК G05D 1/00.
3. А.А. Лебедев, Л.С. Чернобровкин Динамика полета беспилотных летательных аппаратов. - М.: Машиностроение, 1973 г., с.485.
4. А.У. Ялышев, О.И. Разоренов Многофункциональные аналоговые регулирующие устройства автоматики, М.: Машиностроение, 1981 г., с.128.
Способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Система энергопитания рулевых приводов первичных органов управления пассажирского самолета
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ автоматической ориентации космического аппарата и солнечной батареи при отказе устройства поворота солнечной батареи
Способ управления системой терморегулирования радиационной панели космического аппарата
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Система энергопитания рулевых приводов первичных органов управления пассажирского самолета
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Электромеханический силовой минипривод с вращательным или поступательным движением выходного звена в модульном исполнении
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата

