Результат интеллектуальной деятельности: СПОСОБ КОРРЕКЦИИ ДВИЖЕНИЯ ДЛЯ ВЫРАВНИВАНИЯ ДИНАМИЧЕСКОГО ОБЪЕМА БЕЗ ВРЕМЕННЫХ ОГРАНИЧЕНИЙ
Вид РИД
Изобретение
Настоящая заявка относится, в частности, к коррекции ошибок в медицинских сканирующих системах или чем-то подобном. Однако должно быть понятно, что описанный(ые) способ(ы) могут также найти применение в сканирующих системах других типов и/или других системах коррекции ошибок.
Ретроспективная коррекция движения как часть постобработки использует регистрацию объема с интерполяцией пикселей. Ретроспективную коррекцию применяют для внесения поправок на преобразования в плоскости (например, поступательное перемещение в координатах x, y), что требует простых сдвигов и поворотов пикселей изображения. Однако ретроспективная коррекция бессильна при коррекции движения через плоскость (например, поступательного перемещения в направлении срезов или оси), что требует интерполяции между срезами и, следовательно, привносит частичные объемные эффекты и снижение эффективности вращения. Изобразительную информацию, потерянную на движение через плоскость, невозможно полностью восстановить ретроспективной коррекцией с использованием интерполяции.
Вариант проспективной коррекции движения, известный как проспективная коррекция сбора данных был ранее реализован, но процессы реконструкции изображения, регистрации объема, вычисления геометрии и передачи данных должны заканчиваться за время, остающееся между окончанием сбора последней динамической сканограммы и началом следующей сканограммы. В системе со специализированным реконструирующим процессором и современной рабочей станцией полная продолжительность упомянутых процессов может быть порядка нескольких секунд. Следовательно, в таких традиционных системах, время повтора (TR) должно быть достаточно продолжительным, чтобы допускать завершение необходимых вычислений. Если TR является слишком коротким, и сканер не получает обновлений геометрии до начала следующего сбора данных, то возникает нежелательная осциллирующая картина, содержащая периоды избыточной компенсации, которые чередуются с периодами недостаточной компенсации.
Следовательно, в данной области техники существует неудовлетворенная потребность в системах и способах, которые облегчают обеспечение оперативной коррекции движения в реальном времени, которая не зависит от ограничений времени повтора, чтобы улучшить качество сканирования и сократить общее время сканирования.
В соответствии с одним аспектом, система для проспективной коррекции движения (PMC) содержит сканер, который сканирует динамический объем в пациенте, и блок реконструкции, который реконструирует данные измерений, полученные из сканера, в данные изображения. Система дополнительно содержит компонент PMC, который анализирует данные изображения и формирует данные преобразования геометрии, относящиеся к изменению между самой последней геометрией, ассоциированной с ориентацией и положением динамического объема, и новой геометрией, ассоциированной с ориентацией и положением динамического объема, и хост, который формирует обновления геометрии для сканера между последовательными сканированиями как функция данных преобразования геометрии.
В соответствии с другим аспектом, способ выполнения проспективной коррекции движения во время сканирования пациента содержит этап предоставления исходной геометрии в сканер (10), этап сканирования динамического объема и этап формирования данных изображения, индексированных согласно исходной геометрии. Способ дополнительно содержит этап исполнения протокола PMC, который вычисляет информацию о преобразовании по данным изображения, с вычислением движения пациента как функции от информации о преобразовании и исходной геометрии, и этап определения новой геометрии как функцию от движения пациента. Кроме того, способ содержит этап предоставления новой геометрии в сканер (10) для последующего сканирования и повторные этапы сканирования, формирования, исполнения, вычисления, определения и предоставления с использованием новой геометрии.
Одно преимущество состоит в том, что алгоритм проспективной коррекции движения (PMC) не ограничен пределами времени повтора сканирования.
Другое преимущество состоит в механизмах учета использования системных ресурсов, которые обеспечивают, чтобы не выполнялось избыточного обращения к движению пациента, что подавляло бы нежелательную осциллирующую картину коррекции.
Дополнительные преимущества настоящего изобретения станут очевидными специалистам со средним уровнем компетентности в данной области техники после прочтения и изучения нижеследующего подробного описания.
Новизна может реализоваться в различных компонентах и схемах расположения компонентов, и различных этапах и схемах расстановки этапов. Чертежи приведены только для иллюстрации различных аспектов и не подлежат толкованию в смысле ограничения изобретения.
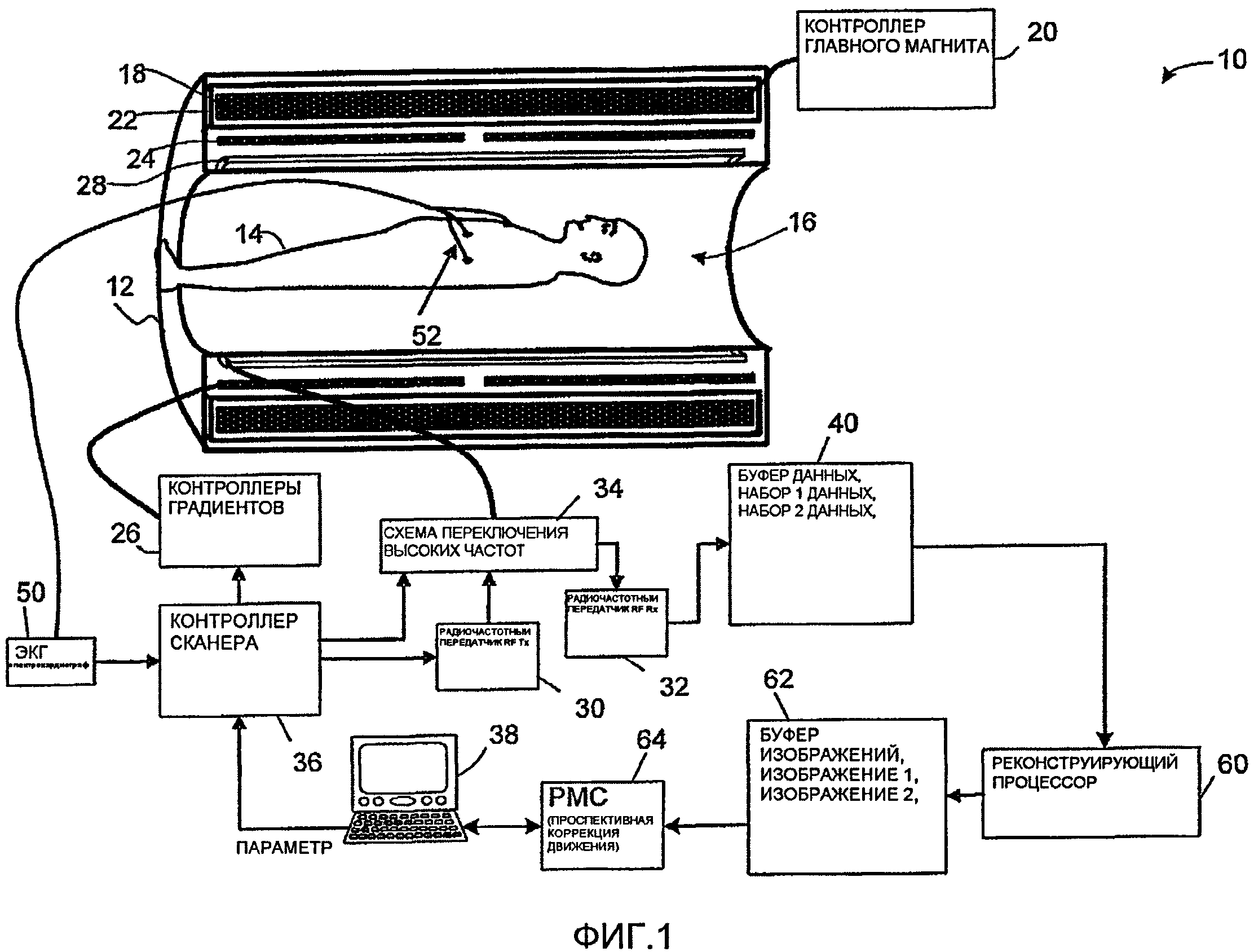
Фиг.1 - наглядное представление магниторезонансной сканирующей системы для выполнения проспективной коррекции движения (PMC) с использованием сканирующего устройства, в соответствии с различными вариантами осуществления, описанными в настоящей заявке.
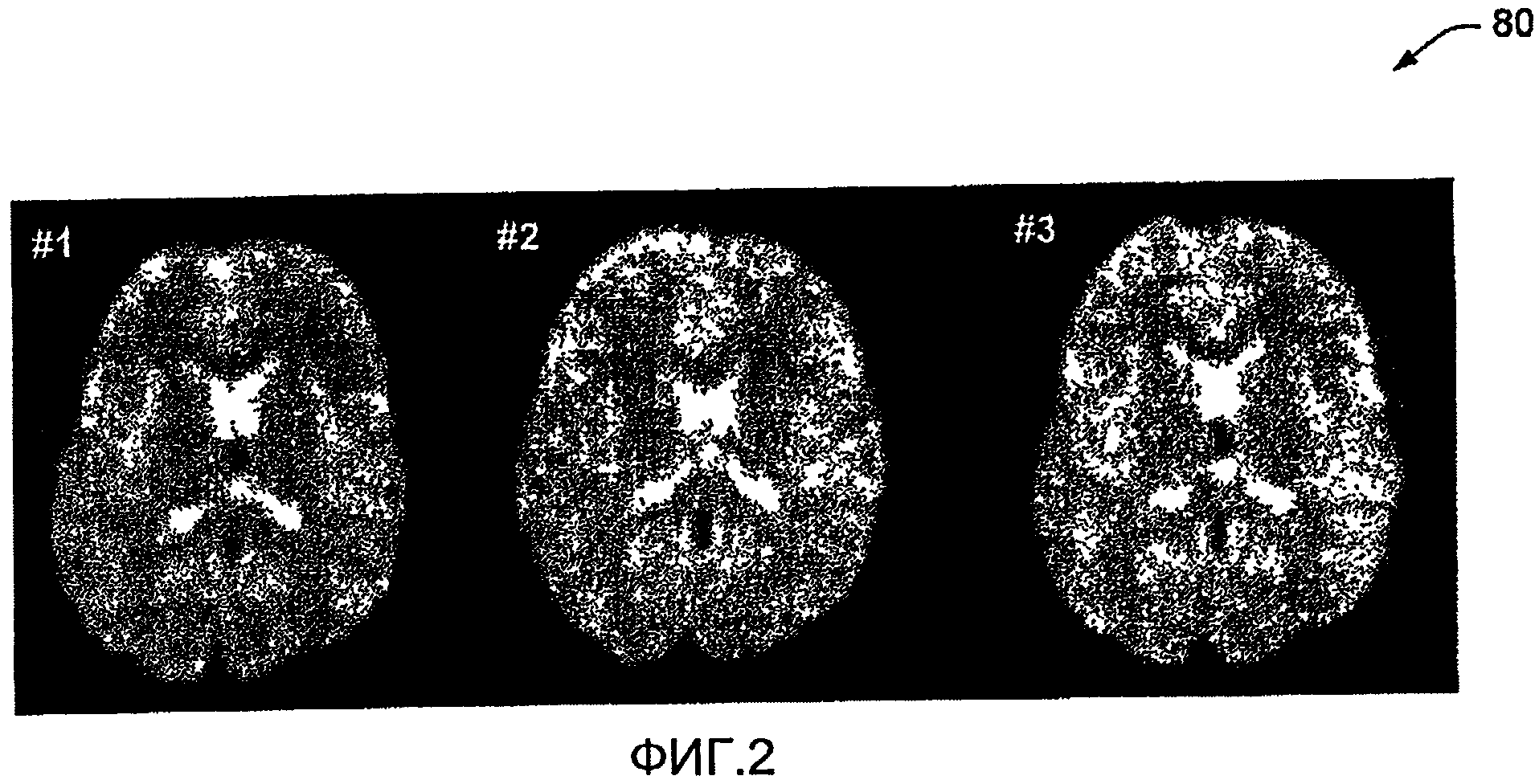
Фиг.2 - изображение, на котором представлены три сканированных изображения (1, 2, и 3), отражающие положение динамического объема, сканируемого и корректируемого с использованием PMC.
Фиг.3 - наглядное представление графического сравнения метода проспективной коррекции движения с методом ретроспективной коррекции движения.
Фиг.4 - наглядное представление возможной нежелательной осциллирующей картины на серии динамических сканограмм для фантома, которая возникает при использовании традиционных методов проспективной коррекции собираемых данных.
Фиг.5 - наглядное представление серии динамических сканограмм, собранной при коротких TR, с использованием метода PMC.
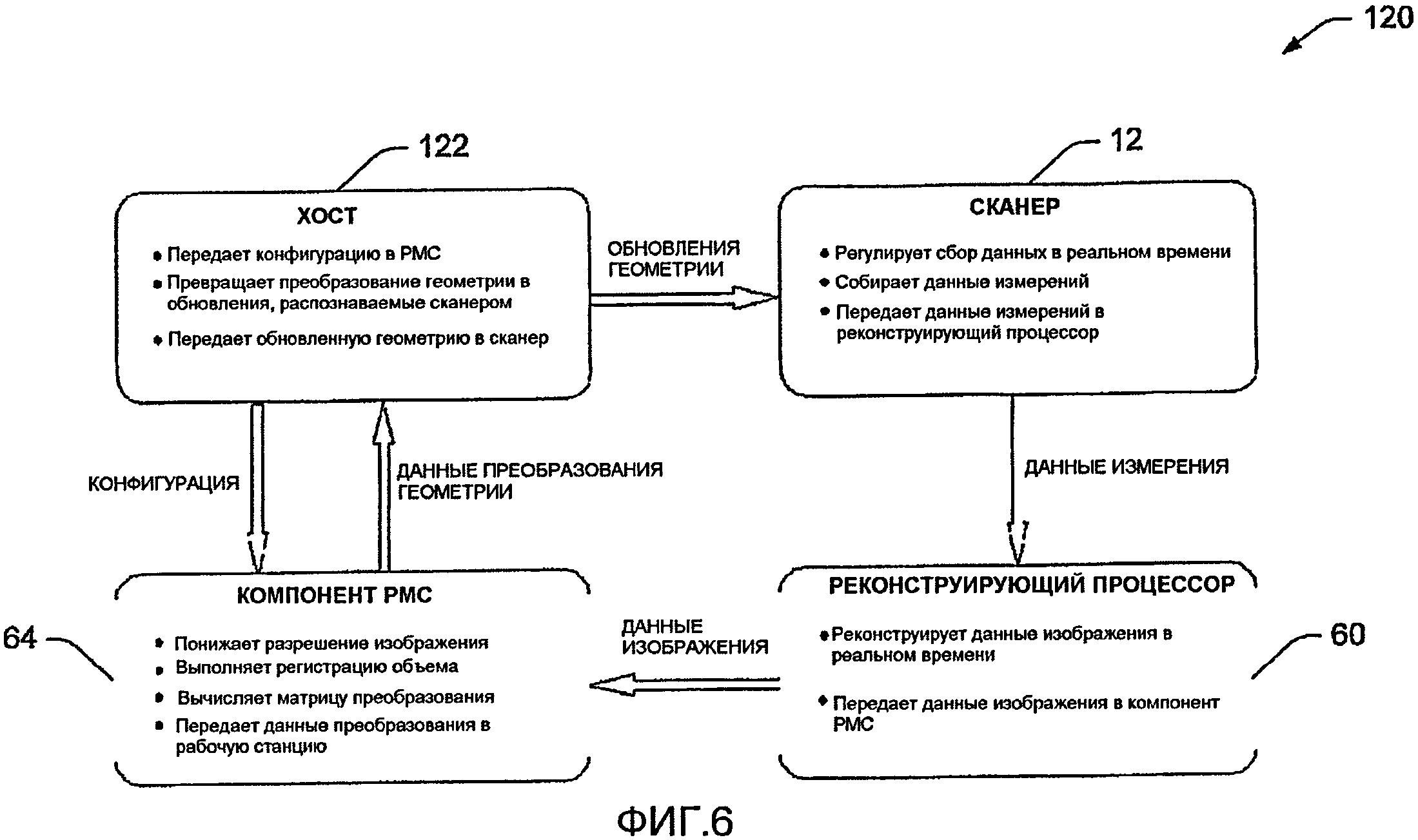
Фиг.6 - схема хода исполнения программы для алгоритма PMC, в соответствии с одним или более вариантами осуществления.
Фиг.7 - наглядное представление модели, не зависящей от скорости передачи данных, для вычисления обновлений геометрии с использованием алгоритма PMC.
Фиг.8 - схема решающего алгоритма для установки состояния алгоритма регистрации при PMC.
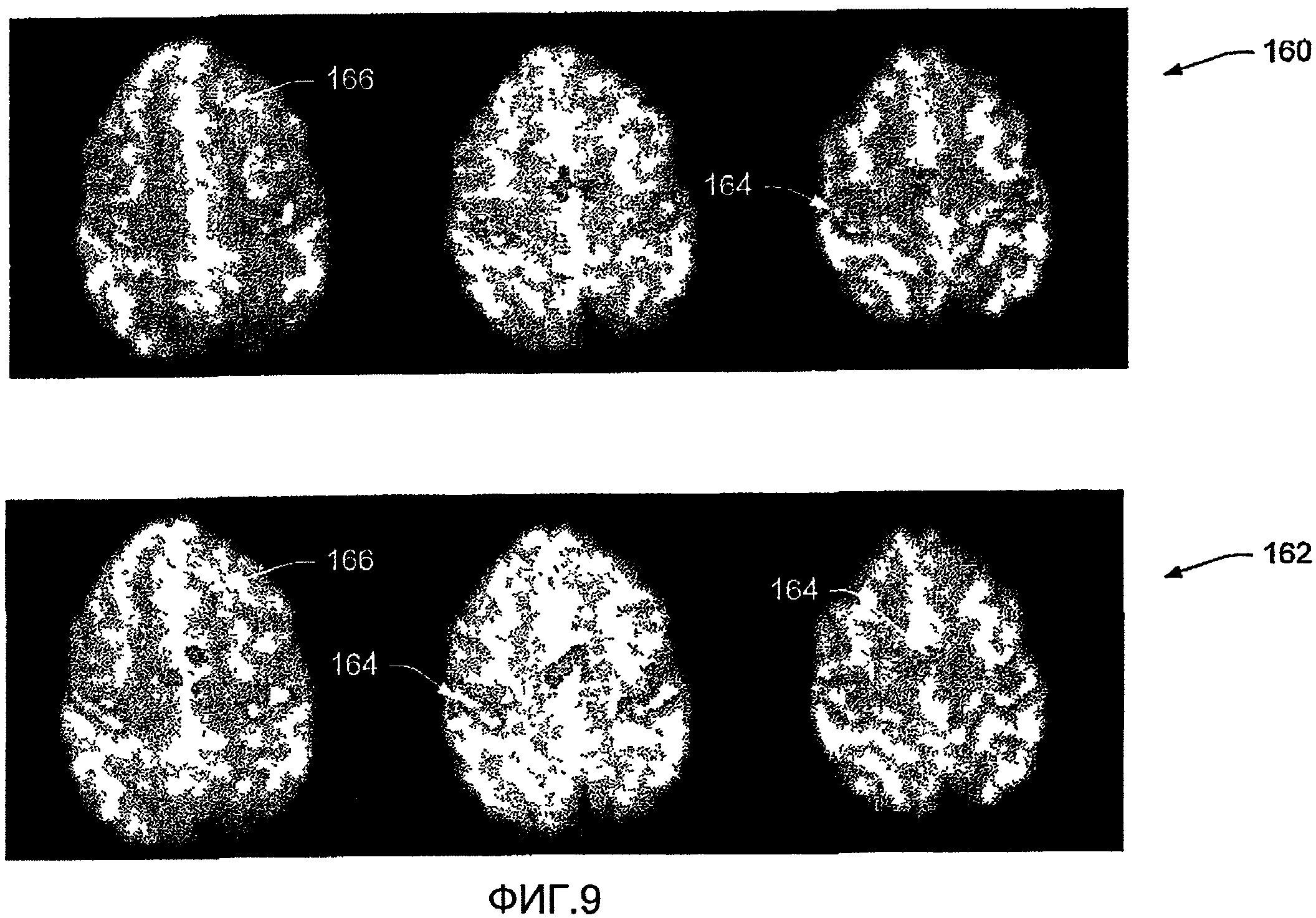
Фиг.9 - наглядный пример сравнения трех смежных «срезов» по картам активизации взаимной корреляции, вычисленным без PMC и с PMC.
Фиг.10 - наглядное представление способа выполнения метода PMC, в соответствии с одним или более аспектами, представленными в настоящем описании.
На фиг.1 представлена магниторезонансная сканирующая система 10 для выполнения проспективной коррекции движения (PMC) с использованием сканирующего устройства 12, в соответствии с различными вариантами осуществления, описанными в настоящей заявке. Методы PMC измеряют изменения геометрии, обусловленные движением объекта обследования во время сбора данных серии динамических сканограмм (например, во время сканирования). Движение объекта обследования корректируется в реальном времени в сканере, что дает, в результате, улучшение в выравнивании объема в серии изображений. Таким образом, настоящее изобретение представляет улучшение ранее известных методов коррекции движения. Например, традиционные схемы требовали, чтобы вся обработка выполнялась до начала следующего сбора данных, что ограничивало применимость сканирования с продолжительным временем повтора (TR). Сканер 10 содержит возможности, которые обеспечивают непрерывную оперативную коррекцию сканера по мере готовности поправок. Следовательно, выполнению PMC не мешают ограничения временной диаграммы серии, что дает преимущество по сравнению с известными схемами коррекции движения. Таким образом, в геометрические параметры сканирования можно вносить поправки в реальном времени по мере того, как пациент сдвигается во время относительно продолжительного сканирования (например, 10-минутного, 30-минутного и т.п.). Следующие ниже разделы более полно поясняют работу и построение сканера, с которым применяется алгоритм PMC.
Сканер 10 содержит корпус 12 сканера, в котором, по меньшей мере, частично расположен пациент 14 или другой объект обследования, при этом сердце, мозг или другой орган или анатомическая область, подлежащие исследованию, расположены в области 16 сканирования сканера 10. Несмотря на то, что описание содержит ссылки на сканер с отверстием, следует понимать, что сканер может также представлять собой сканер с разомкнутым магнитом или магниторезонансный сканер другого типа. Главный магнит 18, расположенный в корпусе 12 сканера, создает, под управлением контроллера 20 главного магнита, статическое (B0) магнитное поле в, по меньшей мере, области 16 сканирования. Обычно, главный магнит 18 является постоянно действующим электромагнитом со сверхпроводящей обмоткой, окруженным криогенным контейнером 22, хотя можно также применять магнит, имеющий сопротивление. В некоторых вариантах осуществления главный магнит 18 создает основное магнитное поле от приблизительно 0,23 Тесла до приблизительно 7 Тесла; однако возможны основные магнитные поля с напряженностями выше или ниже приведенных типичных пределов. Градиентная система, содержащая катушки 24 для формирования градиентов магнитного поля, расположенные в или на корпусе 12, и соответствующие контроллеры 26 градиентов налагают подобранные градиенты магнитного поля на основное магнитное поле в, по меньшей мере, области 16 сканирования. Обычно, катушки 24 для формирования градиентов магнитного поля содержат катушки для создания трех ортогональных градиентов магнитного поля, например x-, y- и z-градиентов.
Обычно цилиндрическая катушка 28 для всего тела смонтирована, по существу, соосно с отверстием магниторезонансного сканера 10. Катушка 28 для всего тела может быть, например, квадратурной катушкой типа «птичья клетка», катушкой с поперечным электромагнитным полем (TEM) и т.п. Кроме того, или в качестве альтернативы, можно применить одну или более локальных радиочастотных катушек, например, поверхностную катушку или множество поверхностных катушек, группу катушек типа SENSE, катушку для торса и т.д. (не показанные). В варианте осуществления, показанном на фиг.1, катушка 28 для всего тела выполняет функции как передачи, так и приема. То есть катушка 28 для всего тела возбуждается на частоте магнитного резонанса одним или более радиочастотными передатчиками 30 для возбуждения магнитного резонанса в объекте 14 обследования, и катушка 28 для всего тела применяется также в связи с одним или более радиочастотными приемниками 32 для приема магниторезонансных сигналов, исходящих из объекта 14 обследования в ответ на упомянутое возбуждение. Обеспечена подходящая схема 34 переключения высоких частот, чтобы катушка 28 для всего тела могла выполнять функции как передачи, так и приема.
Хотя схема переключения высоких частот показана отдельным блоком, в некоторых вариантах осуществления данная схема или ее секции могут быть встроены в катушку для всего тела, радиочастотный передатчик или радиочастотный приемник. В других предполагаемых вариантах осуществления катушка 28 для всего тела выполняет функцию передачи, тогда как одна или более локальных радиочастотных катушек принимает вызванные магниторезонансные сигналы. В других предполагаемых вариантах осуществления катушка 28 для всего тела, и, по меньшей мере, одна локальная радиочастотная катушка выполняет функции как приема, так и передачи. Дополнительно предполагается также возможность использования катушки 28 для всего тела в качестве приемной катушки, тогда как магнитный резонанс возбуждается с использованием, по меньшей мере, одной локальной радиочастотной катушки.
Магниторезонансный сканер 10 работает под управлением от контроллера 36 сканера. Пользовательский интерфейс 38 дает возможность рентгенологу или другому пользователю выбирать, по меньшей мере, одну магнитно-резонансную последовательность, а также позволяет пользователю устанавливать или модифицировать параметры последовательности. Сканер 10 работает под управлением от контроллера 36 сканера в соответствии с выбранной последовательностью для возбуждения магнитного резонанса и формирования магниторезонансных данных, которые сохраняются в памяти или буфере 40 данных. Последовательность может повторно исполняться для формирования нескольких наборов данных, например, показанных набора 1 данных, набора 2 данных, …, показанных в буфере 40 данных, соответствующих повторному исполнению выбранной последовательности с разными значениями для установленного или модифицированного параметра. По желанию, монитор 50 пациента с отведениями 52 или дополнительный монитор, или другое вспомогательное оборудование контролирует пациента 14 во время сбора магниторезонансных данных. Например, если монитор является ЭКГ-устройством, то монитор может предоставлять информацию о кардиосинхронизации, чтобы обеспечивать сбор данных, приблизительно, в выбранной фазе сердца, например, приблизительно, в диастолической фазе или, приблизительно, в систолической фазе. В некоторых вариантах осуществления формирование данных в последовательности насыщения-восстановления или инверсии-восстановления синхронизируется с фазами сердца с помощью монитора 50 так, что данные собираются в нескольких фазах сердца, и получают несколько наборов данных в последовательности насыщения-восстановления или инверсии-восстановления, при этом каждый набор данных приписывается выбранной фазе сердца.
Реконструирующий процессор 60 реконструирует собранные магниторезонансные данные или их части в реконструированное изображение. В показанном варианте осуществления каждое повторное исполнение последовательности формирует отдельный информативный набор магниторезонансных данных, например, набор 1 данных и набор 2 данных для восстановления, собранных с параметром, установленным в соответствующие разные значения для поочередных исполнений последовательности. Эти наборы данных каждый реконструируются в реконструированное изображение реконструирующим процессором 60, например, для формирования реконструированных изображений из соответствующих наборов данных, и т.д., которые надлежащим образом сохраняются в памяти или буфере 62 изображений. В соответствии с примером, данные для восстановления могут направляться в обработку после коррекции на вызванные движением смещение или деформацию, или артефакты в изображении, обусловленные движением пациента, происходящим во время сбора данных.
Компонент 64 PMC анализирует данные изображения с использованием одного или более алгоритмов проспективной коррекции движения для компенсации движения пациента во время сканирования. В соответствии с одним вариантом осуществления, компонент PMC динамично обновляет информацию о положении пациента как функция от изменения положения, с учетом избыточных данных, которые могут порождать осциллирующие картины с избыточной компенсацией и недостаточной компенсацией. Например, компонент PMC получает изображения динамических сканограмм из реконструирующего процессора 60 и/или буфера 62 изображения и распознает, что несколько изображений, индексированных согласно одной и той же геометрии, будут выдавать, по существу, идентичные данные преобразования (например, данные, описывающие изменение пространственного положения, изменение углового положения и т.п.). Например, путем сравнения последовательных изображений несложно найти преобразование, которое описывает поступательный сдвиг и, по желанию, поворот характерных меток двух изображений. Такое преобразование применяют затем в контроллере 36 сканирования, чтобы регулировать RF частоты градиентных магнитных полей, создаваемые RF катушкой 28 и градиентными катушками 24, для поддержки выравнивания визуализируемого объема и срезов или плоскостей изображения в соответствии с выбранными участком анатомии пациента. Компонент PMC обеспечивает, что первое преобразование зарегистрировало движение пациента, что дает результатом изменение для самой последней геометрии, использованной сканером. Однако, компонент PMC дополнительно обеспечивает, чтобы последующие преобразования и ассоциированные избыточные данные, не регистрировали какого-либо изменения, касающегося движения пациента, что защищает сканер системы от появления осциллирующей картины компенсации.
На фиг.2 показано изображение 80, в котором содержатся три сканированных изображения (1, 2 и 3), представляющих положение динамического объема, сканируемого и корректируемого с использованием PMC. В примере, представленном на фиг.2, динамический объем представляет собой человеческий мозг, хотя, возможны сканирование и визуализация других органов в соответствии с различными вариантами осуществления. Движение объекта обследования во время сбора временной серии изображений приводит к нарушению выравнивания от объема к объему, что может исказить анализ данных, например, распределение включений функциональной магниторезонансной визуализации (fMRI) или что-то подобное. Описанные алгоритмы PMC непрерывно измеряют изменения в геометрии, обусловленные движением объекта в продолжение сканирования. Следовательно, PMC вносит корректировки в реальном времени в продолжающееся сканирование, и поэтому последующие изображения корректно выравнены при сборе данных, что улучшает временное выравнивание объема.
В соответствии с примером, изображения 1, 2 и 3 представляют серию изображений динамических сканограмм с TR, равным трем секундам. После динамической сканограммы № 1, объект обследования наклоняется (например, приблизительно на 9°), что вызывает нарушение выравнивания динамической сканограммы № 2. Алгоритмы PMC обнаруживают движение и вносят поправки, и поэтому сбор данных динамической сканограммы № 3 и последующих динамических сканограмм происходит с корректным выравниванием.
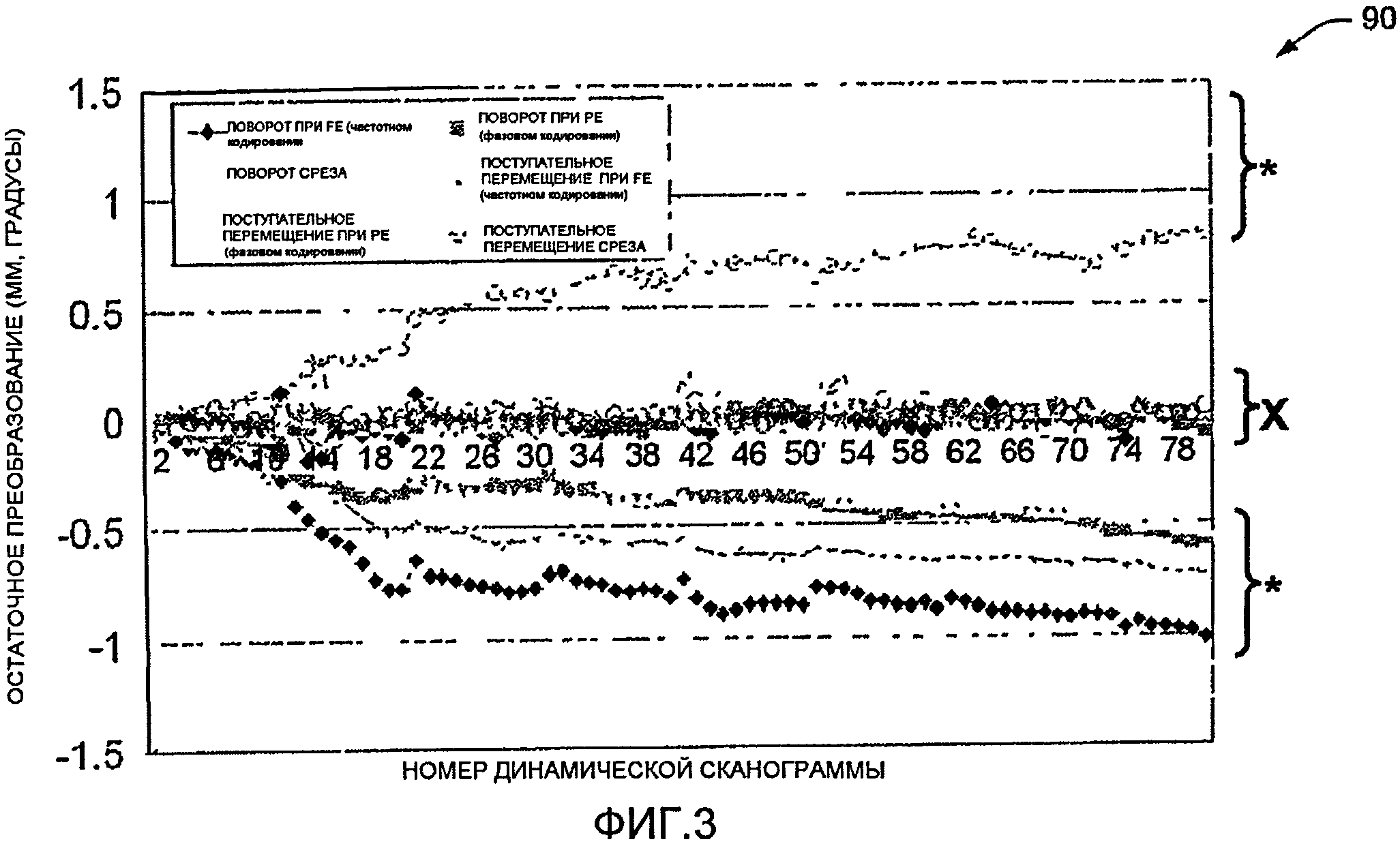
На фиг.3 показано графическое сравнение 90 метода проспективной коррекции движения с методом ретроспективной коррекции движения. Ретроспективная коррекция движения, как часть постобработки, использует регистрацию объема с интерполяцией пикселей. Следовательно, ретроспективная коррекция пригодна для коррекции преобразований в плоскости (например, поступательных перемещений в координатах x, y), что требует простых сдвигов и поворотов пикселей изображения, но непригодна для коррекции преобразования через плоскость (например, поступательного перемещения в направлении «среза»), что требует интерполяции между срезами и, следовательно, привносит значительный частично объемный эффект. Изобразительную информацию, потерянную во время движения через плоскость, невозможно полностью восстановить ретроспективной коррекцией с использованием интерполяции. Следовательно, преимущество PMC состоит в том, что она может учитывать движения через плоскость в реальном времени так, что срезы изображения надежно получают в, по существу, их исходных положениях и ориентациях, что снижает потребность в интерполяции. Таким образом, полученные срезы постоянно сохраняют их выравнивание с серией объема визуализации, что сводит к минимуму любые невозвратные потери изобразительной информации.
Графическое сравнение 90 остаточных данных преобразования при исследованиях динамических сканограмм, собранных с ретроспективной коррекцией движения (*) и PMC (X), представлено на фиг.3. Данные преобразования для серии динамических сканограмм с ретроспективной коррекцией движения вычислены на основе ретроспективной регистрации, применяемой в каждой динамической сканограмме. Остаточные данные преобразования для серии динамических сканограмм с PMC вычисляются на основе регистрации при постобработке на изображениях, скорректированных методом PMC. Повороты (в градусах) и преобразования (в миллиметрах) при частотном кодировании (FE), фазовом кодировании (PE) и осей срезов отображаются на общих осях.
Постоянный дрейф поворота и поступательного смещения в ретроспективных данных приписывают непроизвольному движению объекта исследования (например, расслаблению мышц и т.п.) в процессе сканирования. Преобразования с использованием ретроспективного способа требуют относительно значительных преобразований и интерполяций пикселей почти для каждого изображения динамической сканограммы. И, наоборот, при непрерывной коррекции с учетом движения объекта обследования на протяжении серии динамических сканограмм, изображения с PMC остаются очень близкими к исходной геометрии и, следовательно, порождают очень незначительные остаточные преобразования. Таким образом, метод PMC требует минимальной интерполяции пикселей, при сохранении высокой степени сохранности данных.
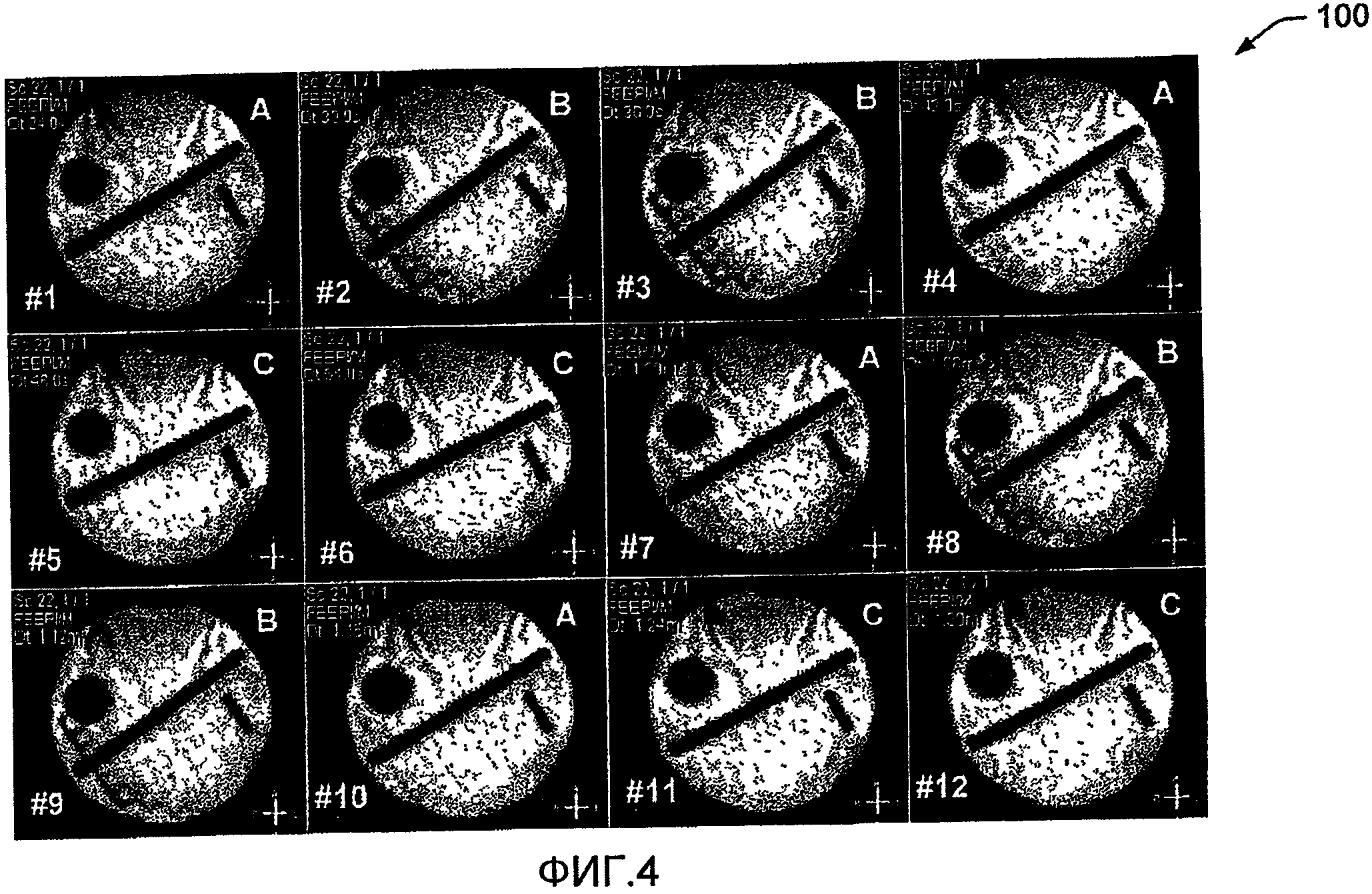
На фиг.4 представлен пример возможной нежелательной осциллирующей картины на серии 100 динамических сканограмм для фантома, которая возникает при использовании традиционных методов проспективной коррекции собираемых данных. Индексы (1-12) динамических сканограмм указаны в нижнем левом углу каждого изображения, и его соответствующая геометрия (A, B, C) указана вверху справа. Различные состояния геометрии можно различать по внешнему виду решетки и угла центрального стержня в каждом изображении фантома. Динамическая сканограмма №1 находится в состоянии A исходной геометрии. Между динамическими сканограммами №1 и №2 происходит движение, изменяющее геометрию в состояние B. Движение не корректируется своевременно для №3, и, следовательно, №3 также находится в состоянии B. Наконец, движение корректируется в состоянии №4 обратно в состояние A. Повторное преобразование приводит к избыточной коррекции №5 в геометрию C, и такая осцилляция продолжается согласно картине A-B-B-A-C-C- всего из-за одного движения.
С использованием традиционных систем и/или способов процессы реконструкции изображения, регистрации объема, вычисления геометрии и передачи данных должны завершаться в остающееся время между окончанием сбора последней динамической сканограммы и началом следующей динамической сканограммы. В системе со специализированным блоком реконструкции и современной рабочей станцией полная продолжительность упомянутых процессов может быть порядка нескольких секунд. Например, как было показано с использованием обычных методов коррекции при сборе данных, при сканировании с матрицей 64×64 и 16 срезами и при TR, составляющем 4 секунды, время сбора данных приблизительно равно 1,8 секундам, что оставляет около 2,2 секунд на завершение процесса коррекции. Следовательно, в подобных обычных системах TR устанавливают достаточно длительным для завершения необходимых вычислений. Если TR является слишком коротким и сканер не получает обновлений геометрии до начала следующего сбора данных, то возникает нежелательная осциллирующая картина.
Со ссылкой на фиг.4 можно рассмотреть следующий ход событий при использовании метода проспективной коррекции при сборе данных для сканирования с коротким TR, составляющим 2 секунды (при этом на вычисления остается только около 200 мс). Движение объекта обследования происходит после динамической сканограммы №1. Поэтому динамическая сканограмма №2 будет собрана с иной геометрией, чем динамическая сканограмма №1. Метод проспективной коррекции при сборе данных может определить различие между №1 и №2, и начинает работать над вычислением необходимых обновлений геометрии (например, преобразования 2→1). Однако, в случае короткого TR, метод проспективной коррекции при сборе данных не способен закончить свои вычисления своевременно, чтобы выдать обновления в сканер до начала сбора динамической сканограммы №3. Поэтому динамическая сканограмма №3 будет собрана с той же «неточной» геометрией, что и динамическая сканограмма №2. Поэтому динамическая сканограмма №3 будет перекошена таким же преобразованием, как динамическая сканограмма №2. Метод проспективной коррекции при сборе данных также обнаруживает такую отличающуюся геометрию и вычисляет отдельное обновление для сканера (преобразование 3→1). Следовательно, если TR является слишком коротким, когда применяется метод проспективной коррекции при сборе данных, то одно движение может создать два обновления: допустимое начальное обновление (2→1) и повторное (3→1). Если ничего не предпринимать для остановки посылки алгоритмом коррекции обоих обновлений, то серия изображений будет соответствовать осциллирующей картине. Допустимое преобразование (2→1) будет своевременно применено к динамической сканограмме №4, и динамическая сканограмма №4 будет приведена к согласованию с исходной геометрией динамической сканограммы №1. Кроме того, повторное преобразование (3→1) все еще находится в очереди и будет применено к динамической сканограмме №5 и приведет к «избыточной коррекции» динамической сканограммы №5 сверх ее исходной геометрии, с видимым проявлением искусственно вызванного движения. Цикл будет продолжаться для этого искусственно вызванного движения, и, тем самым, будет создаваться постоянная осцилляция относительно исходного положения, когда все началось с одного движения.
Чтобы избежать упомянутой нежелательной последовательности событий, минимальное TR для типичного метода проспективной коррекции при сборе данных должно быть достаточно продолжительным для оставления алгоритму времени, достаточного для его вычислений. Упомянутое ограничение ограничивает TR относительно большими значениями приблизительно на 2 секунды больше минимума. Увеличенное время может быть еще больше (например приблизительно на 2-4 секунды), если применяется более крупная матрица изображения или большее число срезов. Данное ограничение в некоторых отношениях препятствует применению MR (магнитного резонанса). Например, данное ограничение неизбежно увеличивает общее время сканирования, ограничивает контраст изображения, связанный с TR, ограничивает временное разрешение серии динамических сканограмм, вызывает конфликты с согласованными по времени сигналами возбуждения для fMRI и привносит осциллирующую картину, если время обработки продлевается, за пределы начальной оценки вследствие непредвиденных обстоятельств и/или характеристик рабочей станции и блока реконструкции.
Напротив, описанный алгоритм PMC устраняет ограничения, связанные с TR, и дает пользователю возможность свободно регулировать TR. Алгоритм PMC использует модель, независимую от скорости передачи данных, для применения обновлений геометрии. Обновления оперативно доставляются в сканер, независимо от скорости, с которой реконструируются и обрабатываются данные. Поэтому несколько динамических сканограмм могут быть надежно собраны в то время, когда алгоритм PMC вычисляет преобразование исходной геометрии. Следовательно, алгоритм PMC можно использовать как в ситуациях с продолжительными TR, так и в ситуациях с короткими TR, что облегчает устранение связанных со временем ограничений, сопряженных с традиционными способами.
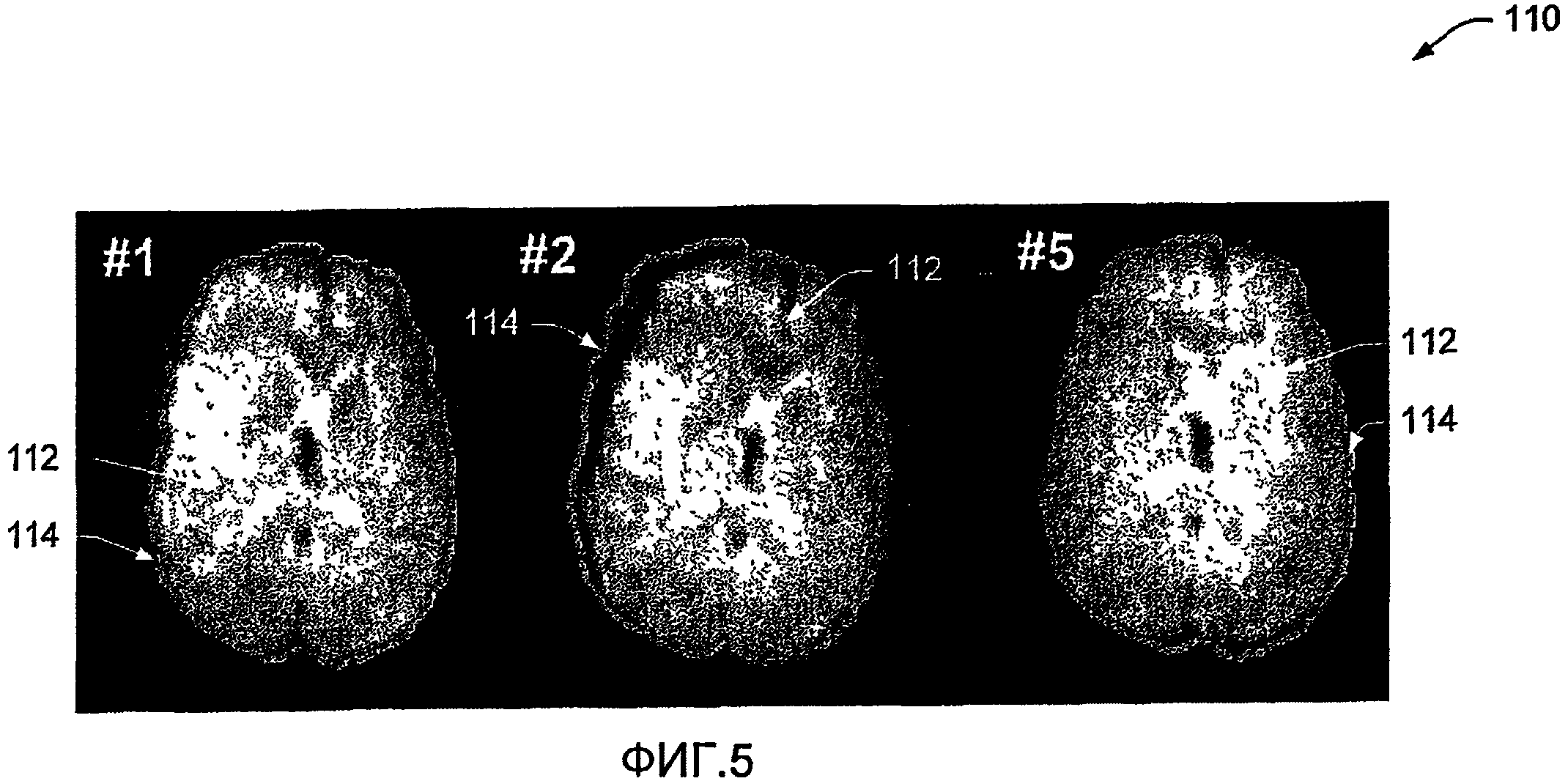
На фиг.5 показана серия 110 динамических сканограмм, собранных с коротким TR (например, около 1 секунды), с применением метода PMC. Изображения (обозначенные 1, 2 и 5) в серии показывают, каждое, фактическую ориентацию 112 и ожидаемую ориентацию 114 визуализируемого динамического объема (например, мозга пациента, в настоящем примере). После динамической сканограммы №1 голова обследуемого объекта наклоняется (например, приблизительно на 5° в настоящем примере), что вызывает нарушение выравнивания между фактической и ожидаемой ориентациями головы пациента. В то время как выполняются следующие сканирования, алгоритм PMC обнаруживает движение и оперативно передает поправки в сканер в надлежащее время для корректного выравнивания динамической сканограммы №5.
Дополнительной особенностью PMC является «понижение разрешения» изображений для обработки регистрации, чтобы экономить время и дополнительно смягчать ограничения, связанные с TR. Входящие высокоразрешающие изображения, полученные реконструкцией, (например, 128×128, 256×256 и ниже) реинтерполируются в изображения с меньшим разрешением (например, 64×64 или ниже) перед тем, как они обрабатываются для регистрации. Поскольку длительность процесса регистрации прямо пропорциональна размеру матрицы, то полное время обработки уменьшается, что уменьшает вероятность того, что обновления геометрии будут получены сканером до того, как начнется следующее сканирование. Кроме того, алгоритм PMC содержит динамически настраиваемый алгоритм регистрации. Например, на основе скорости обработки данных компонентом PMC алгоритм может самонастраиваться в середине серии динамических сканограмм для оптимизации эффективности алгоритма PMC.
На фиг.6 показана схема 120 хода исполнения программы для алгоритма PMC, в соответствии с одним или более вариантами осуществления. На схеме показан хост 122, который может быть пользовательским интерфейсом 38, показанным на фиг.1, рабочей станцией, соединенной с возможностью выполнения определенной функции, со сканером и компонентом PMC и т.п. Хост обеспечивает обновления геометрии в сканер 12, который, в свою очередь, выдает данные измерений в реконструирующий процессор 60. Затем реконструирующий процессор выдает данные изображения в компонент PMC 64, который предоставляет данные преобразования геометрии в хост. Кроме того, хост предоставляет данные конфигурации в компонент PMC. Следует понимать, что реконструирующий процессор 60 и компонент PMC 64, а также любые ассоциированные базы данных (не показанные) могут быть отдельными от хоста или могут входить в него в соответствии с разными вариантами осуществления. В некоторых вариантах осуществления, компонент PMC 64 и реконструирующий процессор реализованы в форме программного обеспечения или встроенных программ, исполняемых в хосте, например, ряде компьютерно-исполняемых процедур для выполнения различных функций, описанных в настоящей заявке.
Программа PMC исполняется как фоновое приложение на рабочей станции, с подключениями к программе сканера, блока реконструкции и хоста. Сканер собирает данные объемов визуализации по одной динамической сканограмме за один раз и посылает данные измерений в блок реконструкции. Блок реконструкции реконструирует изображения в реальном времени и посылает данные к PMC, которая реинтерполирует входящие изображения полного разрешения для формирования данных изображения с низким разрешением (например, 64×64 или ниже), чтобы сократить время регистрации. Время регистрации прямо пропорционально размеру матрицы данных, и, следовательно, время обработки сокращается благодаря работе с изображениями с пониженным разрешением, вместо изображений с полным разрешением. Программа PMC вычисляет преобразование геометрии текущего объема визуализации относительно базового объема (например, первой динамической сканограмме в серии) с использованием алгоритма регистрации твердого тела. После завершения регистрации каждого динамического объема формируется содержащая шесть параметров матрица преобразования твердого тела, состоящая из трех поворотов и трех поступательных перемещений. Программа хоста интерпретирует данные преобразования и преобразует их в опознаваемую геометрию, которая посылается в сканер. Программа хоста дополнительно отслеживает геометрию, используемую для сбора каждой динамической сканограммы. Программа хоста формирует пакет обновлений для сканера, который выбирается сканером при его следующей возможности. Последующие динамические сканограммы собираются сканером с использованием обновленной геометрии, пока не встречается новое преобразование. Таким образом, ход выполнения программы циклически повторяется для остающихся сканирований в серии динамических сканограмм, и сканер оперативно обновляется для внесения поправок в следующую динамическую сканограмму, как только они подготовлены.
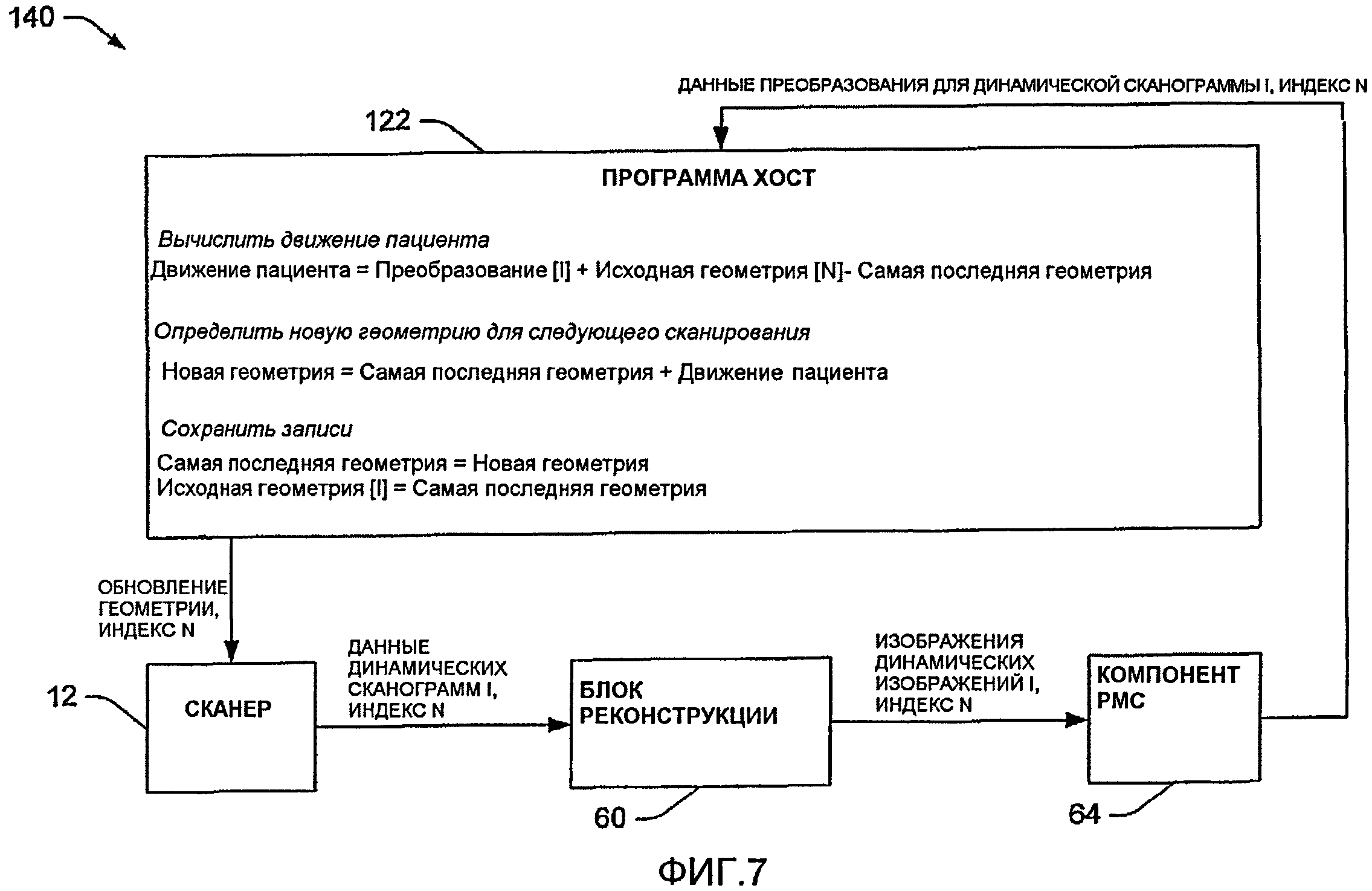
На фиг.7 показана модель 140, не зависящая от скорости передачи данных, для вычисления обновлений геометрии с использованием алгоритма PMC. Процесс начинается со сбора данных I динамических сканограмм (например, где I=N+n, где n=1, 2, …) сканером 12, которые индексируются и выдаются в реконструирующий процессор 60. Особенность процесса связана с учетом геометрии, применяемой для сбора каждой сканограммы. Каждый входящий набор изображений из динамической сканограммы N предписывает компоненту PMC 64 формировать данные преобразования. Программа 122 хоста получает данные преобразования из компонента PMC и формирует новую геометрию, которая должна применяться для сбора следующей динамической сканограммы с индексом I. В случае, когда обновления доступны перед каждым следующим сканированием, индекс следующей динамической сканограммы, которая будет использовать информацию о новой геометрии, определяется как I=N+1. Однако, в ситуации с коротким TR, когда динамические сканограммы пропускаются, I=N+n, где n>1.
Новая геометрия сохраняется в записи (например, в базе данных или памяти) программой хоста вместе с индексом изображения, данные преобразования которого были использованы для формирования новой геометрии (N). Обновления геометрии и индекс посылаются в сканер для оперативного получения и применения для следующего пригодного сканирования. После того, как обновления получены сканером, сканер помечает данные предстоящих измерений для динамической сканограммы I вспомогательной меткой данных, которая содержит индекс N. Таким образом, текущий набор изображений содержит запись геометрии, которая применялась для его создания. Блок реконструкции присоединяет индекс N к каждому изображению из динамической сканограммы I, которую он выдает в компонент PMC. Компонент PMC вычисляет данные преобразования для динамической сканограммы I и передает вместе с индексом N программу хост-комьютера. Программа хоста вычисляет новую геометрию на основе самой последней геометрии и входящих данных преобразования. С использованием индекса N программа хоста оценивает запись с данным индексом для определения исходной геометрии, использованной для сбора текущего набора данных. Программа хоста сравнивает самую последнюю геометрию с новой геометрией, рассчитанной по данным преобразования для динамической сканограммы I, и различие между двумя геометриями определяется как фактическое движение пациента. Затем движение пациента добавляется к текущей геометрии для создания новой геометрии. Новая геометрия посылается в сканер, и сохраняется запись текущей геометрии и исходной геометрии. Таким образом, поток данных итеративно продолжается, и обновления геометрии оперативно применяются сканером по мере их готовности. Следующая динамическая сканограмма (например, с индексом >=I+n) может обновляться с использованием информации о геометрии, полученной из изображения I, и может нести индекс I.
В соответствии с примером, если обновления не могут достигнуть сканера в надлежащее время для следующего сбора данных (n>1), несколько динамических сканограмм будут собраны с той же самой геометрией. Каждая динамическая сканограмма содержит одинаковый индекс N, который является ссылкой на геометрию, с которой упомянутая сканограмма была собрана. Когда упомянутые динамические сканограммы (с I=N+1, N+2 и т.п.) обрабатываются программой PMC, они формируют, по существу, идентичные данные преобразования. В обычных системах применение каждого из упомянутых преобразований приводило бы в состояние осцилляций. Однако программа PMC поддерживает запись исходной геометрии, и, следовательно, только первое преобразование регистрирует движение пациента и, тем самым, приводит к изменению, приводящему к самой последней геометрии. Поскольку последующие преобразования формируют, по существу, такие же данные преобразования, они будут формировать такую же новую геометрию, поскольку они собраны с той же исходной геометрией. Соответственно, вычисления, использующие последние данные преобразования будут формировать нулевое движение пациента и, тем самым, препятствовать созданию алгоритмом осциллирующей картины.
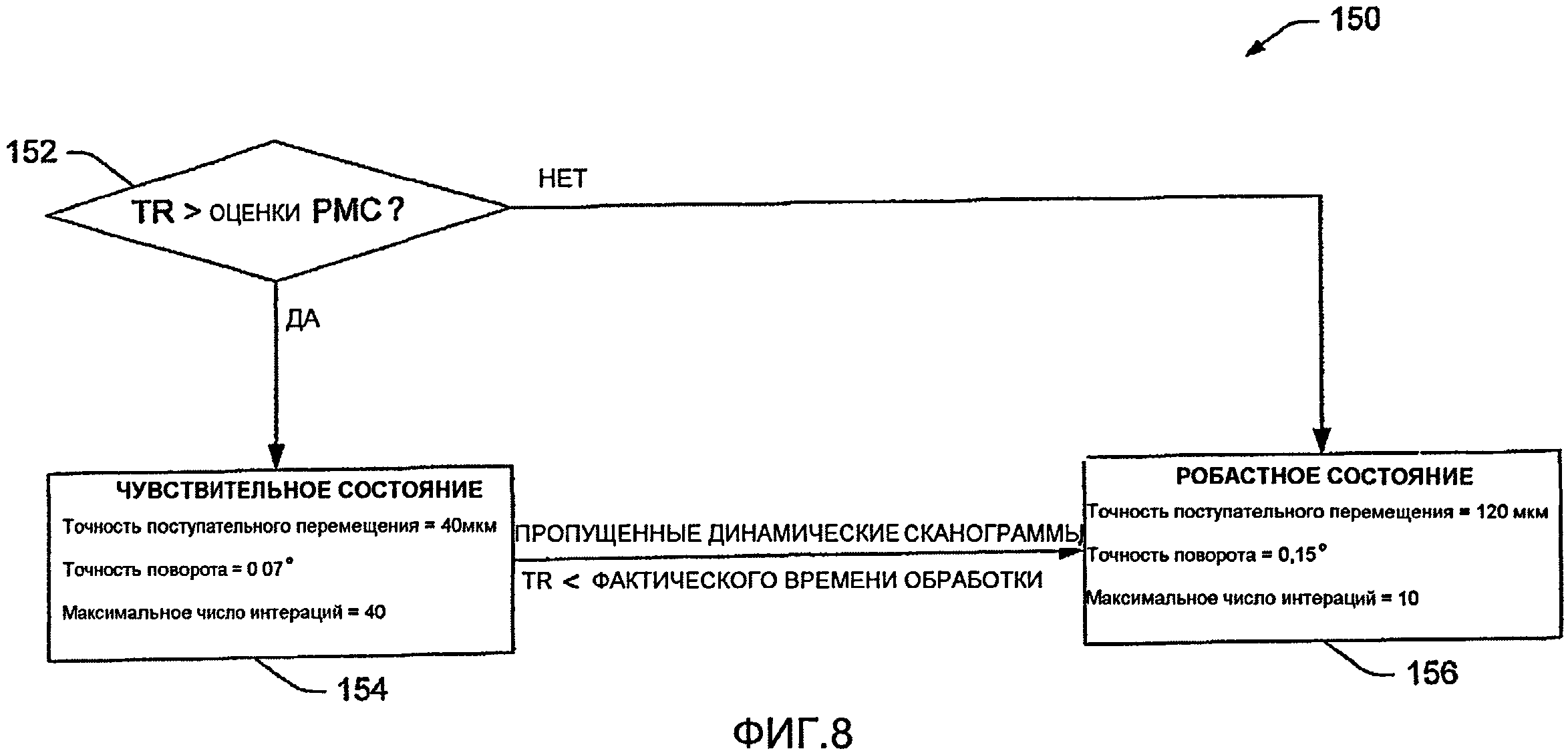
На фиг.8 представлен решающий алгоритм 150 для установки состояния алгоритма регистрации при PMC. Алгоритм содержит, на этапе 152, определение, не является ли TR больше, чем расчетное время обработки для PMC. Если TR больше, чем расчетное время обработки для PMC, то, на этапе 154, PMC устанавливается в чувствительное состояние алгоритма регистрации. В этом состоянии, например, различные параметры, ассоциированные с точностью поступательного перемещения и/или поворота, максимальным числом итераций и т.п., могут быть настроены на предварительно заданные значения или диапазоны. В соответствии с показанным примером, точность поступательного перемещения устанавливается приблизительно равной 40 микрометрам, точность поворота устанавливается приблизительно равной 0,07 градусам, и допускается, максимум, около 40 итераций.
Если TR меньше, чем фактическое время обработки для PMC, то одна или более динамических сканограмм может пропускаться, и PMC устанавливается в робастное состояние алгоритма регистрации на этапе 156, когда применяются более робастные значения параметров. Например, согласно примеру, значения параметров робастного состояния могут содержать настройки точности поступательного перемещения на приблизительно 120 микрометров, точности поворота на приблизительно 0,15 градусов, и допуск, максимум, около 10 итераций. Кроме того, или в качестве альтернативы, PMC можно устанавливать непосредственно в робастное состояние регистрации при определении, что TR не больше, чем расчетное время обработки для PMC. Следует понимать, что вышеприведенные примеры значений параметров описаны для иллюстрации, чтобы показать взаимосвязь между чувствительным и робастными состояниями и/или значениями, и что настоящее изобретение не ограничено такими значениями.
Таким образом, алгоритм регистрации при PMC можно настраивать с учетом требуемого уровня точности и максимального числа итераций. Регистрации с высокой точностью и большим числом итераций более чувствительны к небольшим движениям, но за счет более продолжительных времен обработки. Регистрации с низкой точностью и малым числом итераций сравнительно слабо чувствительны к малым движениям, но, обычно, робастны к большим движениям и намного быстрее. По этой причине, алгоритм PMC может выполняться в одном из двух вышеописанных состояний: чувствительном и робастном. Чувствительное состояние допускает выполнение точных настроек для компенсации небольших непроизвольных движений, например, при fMRI исследованиях. Робастное состояние облегчает работу в ситуациях, когда ожидается значительное движение в объеме, и/или когда имеет значение скорость/TR. Значения параметров регистрации задаются как часть конфигурации PMC программой хоста, исполняемой в начале каждого сканирования. Значения параметров настраиваются как одна группа для каждого состояния и могут изменяться пользователем через параметры системного уровня.
Выбор состояния является функцией от оценки полного потребного времени обработки (например, для реконструкции, регистрации, вычисления и передачи данных). Если, на основе оценки выясняется, что TR является достаточно большим для того, чтобы алгоритм PMC мог надежно формировать свои обновления до начала следующего сканирования, то алгоритм устанавливают в чувствительное состояние. Если достаточно продолжительное TR не предполагается, то алгоритм настраивают на получение более робастных данных в более короткое оборотное время.
Алгоритм PMC содержит также, так называемый, «предохранительный клапан» для дополнительной оптимизации эффективности. Например, если динамическая сканограмма пропускается из-за того, что продолжительность TR не достаточна для фактического времени обработки в чувствительном состоянии вследствие непредвиденного удлинения времени обработки/реконструкции, то алгоритм может динамично перестроить свою конфигурацию в процессе работы в робастное состояние согласно продолжительности сканирования.
На фиг.9 приведено сравнение трех смежных «срезов» по картам активизации взаимной корреляции, вычисленным без PMC, 160, и с PMC, 162. Области активизации 164 на картах с задействованным PMC обычно ярче и более соответствуют анатомии серого вещества 166. Как показано, активные области 164 на картах, вычисленных с PMC, 162, как более многочисленны, так и более робастны.
PMC можно применять в прикладных задачах динамического сканирования, когда большое значение имеет выравнивание объема визуализации. Особенно важно применение PMC для неврологической MR томографии, в частности fMRI. С обеспечением более хорошего выравнивания объема визуализации по сравнению с ретроспективной коррекцией движения, улучшаются карты активизации fMRI в отношении специфичности и статистической значимости областей активизации. Благодаря устранению ограничений, связанных с TR, описанные системы и способы PMC дают стратегическое преимущество по сравнению с традиционными методами. Кроме того, PMC можно использовать с более широким спектром различных видов fMRI, временных разрешений и матриц сбора данных.
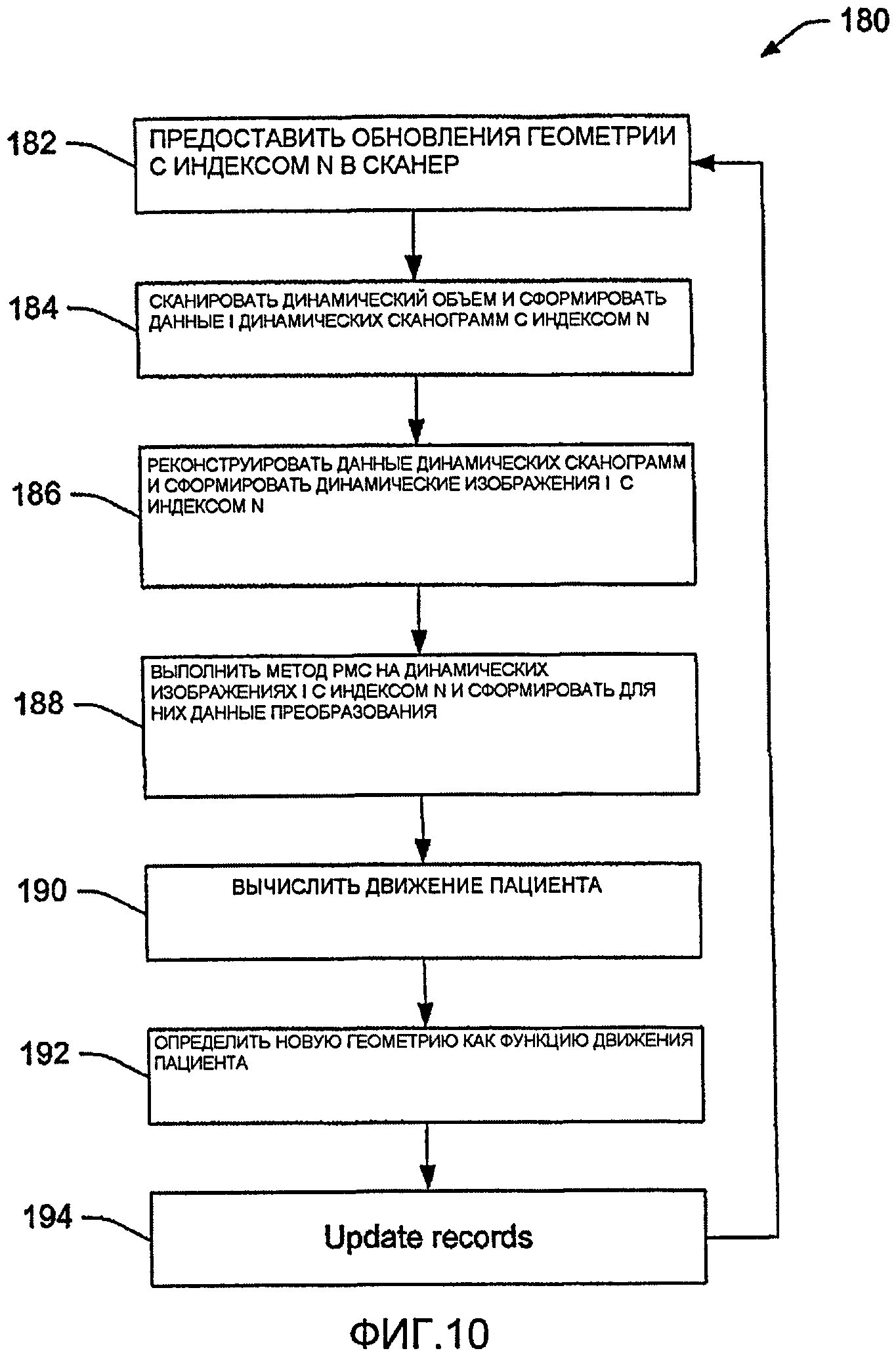
На фиг.10 представлен способ 180 для выполнения метода проспективной коррекции движения (PMC) в соответствии с одним или более аспектами, описанными в настоящей заявке. На этапе 182, обновления геометрии с индексом N подаются в сканер, например, установку для магниторезонансной визуализации. Если процедура сканирования находится в ее начале, то «обновления» содержат начальную геометрию для динамического объема (например, органа или другой ткани пациента), подлежащего сканирования. Индекс N описывает исходную геометрию, используемую для сбора динамического изображения или набор изображений в ходе первой итерации способа, и, на этапе 184, данные I динамического изображения формируются во время сканирования динамического объема. На этапе 186 выполняется реконструкция динамических данных I для формирования изображений. На этапе 188 исполняется протокол PMC на динамических изображениях I с индексом N, и для них формируются данные преобразования. То есть каждый входящий набор изображений из динамического объема N предписывает алгоритму PMC формировать данные преобразования. Данные преобразования описывают изменение положения динамического объема из ожидаемого положения на основе исходной геометрии, N.
Движение пациента (или объема) вычисляется на этапе 190 на основе информации, касающейся PMC, и данных преобразования. Например, движение пациента определяется в виде суммы преобразования [I] и исходной геометрии [N] за вычетом самой последней геометрии. В соответствии с одним вариантом осуществления, программа хоста получает данные преобразования из алгоритма PMC и формирует новую геометрию, которая должна применяться для сбора данных новой динамической сканограммы с индексом I. В случае, когда обновления доступны до следующего сканирования, индекс следующей динамической сканограммы, которая будет использовать новую информацию о геометрии, определяется как I=N+I. Однако в ситуации с коротким TR, когда динамические сканограммы пропускаются, I=N+n, где n>1. Во время первой итерации, самая последняя геометрия является исходной геометрией, так что движение равно изменению положения, представленного данными преобразования [I]. На этапе 192 новая геометрия для следующего периода сканирования определяется как функция вычисленного движения пациента. Например, если сканируемым динамическим объемом является мозг пациента, и голова пациента поворачивается на 5 градусов между периодами сбора динамических изображений в ходе 30-минутного сканирования, то новая геометрия поворачивается для согласования с поворотом головы пациента, чтобы обеспечить такое же выравнивание последующих динамических сканограмм (сканограмм изображений), как для сканограмм до поворота головы. Таким образом, новая геометрия вычисляется как сумма самой последней геометрии и движения пациента.
На этапе 194 записи данных обновляются, чтобы отразить изменения положения пациента. Например, новая геометрия, вычисленная на этапе 192, записывается как самая последняя геометрия и посылается в сканер для добавления в виде индекса для следующего набора данных динамического изображения. Таким образом, сохраняются записи о геометрии, использованной для сбора каждой сканограммы динамического объема. То есть каждая новая геометрия сохраняется в записи (т.е. базе данных или памяти) вместе с индексом изображения, данные преобразования которого использованы для генерации новой геометрии (N). Обновления геометрии и индексы посылается в сканер, чтобы оперативно применяться для следующего подходящего доступного сканирования. После того как обновления получены сканером, сканер помечает предстоящие данные измерений для динамической сканограммы I вспомогательной меткой данных, которая содержит индекс N. Таким образом, текущий набор изображений содержит запись геометрии, которая применялась для его создания. Индекс N присоединяется к каждому изображению из динамической сканограммы I, которая выдается в алгоритм PMC.
В соответствии с одним вариантом осуществления, способ возвращается на этап 182 для другой итерации, в ходе которой алгоритм PMC вычисляет данные преобразования для динамической сканограммы I и передает индекс N в программу хоста. Программа хоста вычисляет новую геометрии на основе самой последней геометрии и входящих данных преобразования. С использованием индекса N программа хоста оценивает запись с данным индексом для определения исходной геометрии, использованной для сбора текущего набора изображений. Например, программа хоста сравнивает самую последнюю геометрию с новой геометрией, полученной по данным преобразования для динамической сканограммы I, и различие между двумя геометриями определяется как фактическое движение пациента. Затем движение пациента добавляется к текущей геометрии для создания другой новой геометрии. Новая геометрия снова посылается в сканер, и сохраняется запись текущей геометрии и исходной геометрии. Таким образом, поток данных итеративно продолжается, и обновления геометрии оперативно применяются сканером по мере их готовности. Следующая динамическая сканограмма (например, с индексом, большим или равным I+n) может обновляться с использованием информации о геометрии, полученной из изображения I, и может нести индекс I.
Акустическая система и способ ее работы
Быстрая параллельная реконструкция для произвольных траекторий к-пространства
Оптическое устройство, осветительное устройство и система для освещения межлистового полога растений
Сеть гетерогенных устройств, включающая в себя, поменьшей мере, один узел устройств наружного освещения
Синтез высокопроизводительных индикаторных частиц оксида железа для визуализации с применением намагниченных частиц (мрi)
Получение данных компьютерной томографии (ст)
Способ и устройство для оценки структуры в сигнале
Оценка плотности молочной железы
Способ определения пространства поиска pdcch в системе связи, использующей агрегацию несущих
Получение тонких слоев текучей среды, содержащей клетки для анализа
Детектор спектральной визуализации
Шифрование элементов данных на основе идентификации для безопасного доступа к ним
Одновременная основанная на модели сегментация объектов, удовлетворяющих заранее заданным пространственным соотношениям
Устройство автостереоскопического отображения
Фен, насадка для фена и фен с такой насадкой
Комбинация asg, катода и держателя для детектора фотонов
Сиды с компенсированной белой точкой для жк-дисплеев
Система беспроводной передачи энергии
Механизм выбора режима 3d для воспроизведения видео
Устройство для паровой обработки и смешивания пищевых продуктов

