Результат интеллектуальной деятельности: УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ ЛЮЛЬКИ АВТОПОДЪЕМНИКА
Вид РИД
Изобретение
Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано в системах защиты и управления автоподъемников (автогидроподъемников, пожарных машин, автомобилей-вышек, автовышек).
В настоящее время на автоподъемниках распространены механические следящие системы, обеспечивающие ориентирование их рабочих площадок - рычажная и канатно-блочная. В рычажной следящей системе (например, на автогидроподъемниках ВС-18 и ВС-22) рычаги и коромысла, образуя параллелограмм, удерживают рабочую площадку (люльку) в заданном положении при любом пространственном положении колен подъемника. Канатно-блочная следящая система (подъемники АГП-12, МШТС), решающая эту же задачу, содержит звездочки, установленные в шарнирных узлах подъемника и соединенные цепью [1].
К недостаткам механических следящих систем горизонтирования относятся повышенная сложность их реализации для подъемников с телескопическими коленами, а также высокая металлоемкость и сложность защиты от механических повреждений.
Наиболее близким к предложенному является устройство горизонтирования люльки подъемника, реализованного на базе грузоподъемного крана. Механизм горизонтирования выполнен с гидравлическим приводом, шток которого соединен с плечом рычага, закрепленного на раме. На плече выполнены элементы для его соединения с люлькой [2].
Его недостатком является невозможность применения на автоподъемниках с длинными телескопируемыми стрелами (коленами), что обусловлено сложностью подвода гидравлических магистралей к приводу горизонтирования.
Кроме того, при потере давления в гидравлической системе привода, в частности, из-за ее повреждения, возможны неконтролируемые перемещения люльки, что снижает безопасность работы автоподъемника. К этому же недостатку приводит отсутствие блокирования приводов горизонтирования и перемещения люльки при ее столкновении с препятствиями, в случае превышения угла наклона пола люльки его предельно допустимой величины, а также при возникновении неисправности устройства горизонтирования.
Известное устройство имеет также ограниченные функциональные возможности ввиду отсутствия горизонтирования люльки в двух плоскостях, а также индикации и сигнализации положения люльки.
Техническими результатами, на достижение которых направлено изобретение, являются:
- обеспечение возможности применения устройства горизонтирования на автоподъемниках с длинными телескопируемыми стрелами (коленами);
- повышение безопасности работы автоподъемника за счет исключения неконтролируемых перемещений люльки при нарушениях энергоснабжения ее привода и блокирования перемещения люльки в аварийных режимах;
- расширение функциональных возможностей устройства за счет горизонтирования люльки в двух плоскостях, а также реализации индикации и сигнализации ее положения.
В устройстве горизонтирования люльки автоподъемника, закрепленной на верхнем колене или верхней секции его стрелового оборудования с возможностью ее поворота, содержащем привод горизонтирования, установленный в узле крепления люльки и приспособленный для приведения ее пола в горизонтальное положение, указанные технические результаты достигаются за счет того, что привод горизонтирования выполнен реверсивным электромеханическим с использованием электродвигателя и самотормозящейся передачи. Электродвигатель соединен с электронным микропроцессорным блоком горизонтирования, включающим в себя или с подключенным к нему датчиком угла наклона пола люльки относительно гравитационной вертикали (микромеханическим акселерометром). Блок горизонтирования формирует пропорциональные или дискретные сигналы управления электродвигателем привода при отклонении пола люльки от горизонтального положения.
Кроме того, с целью достижения указанных технических результатов, в устройстве горизонтирования, в частности:
- передача выполнена винтовой или червячной;
- привод горизонтирования имеет автономный источник питания (аккумулятор), установленный в люльке и/или прикрепленный к ней;
- привод, электронный блок горизонтирования и датчик угла наклона выполнены двухкоординатными с возможностью горизонтирования пола люльки в двух плоскостях;
- привод реализован с возможностью электрической изоляции люльки;
- устройство горизонтирования дополнительно содержит датчик столкновения люльки с препятствием (или приближения к нему) и механизм блокирования привода горизонтирования и/или перемещения люльки по сигналу этого датчика.
При этом электронный блок горизонтирования, в частности:
а) формирует сигналы управления электродвигателем при отклонении пола люльки от горизонтального положения на предварительно установленную величину, записанную, например, в памяти микроконтроллера;
в) содержит цифровой или аналоговый указатель угла наклона пола люльки относительно гравитационной вертикали и/или сигнализатор превышения предельно допустимой величины этого угла;
г) обеспечивает формирование и передачу в систему управления автоподъемника сигнал блокирования вертикального и горизонтального перемещения люльки и/или аварийной остановки двигателя, если угол наклона пола люльки превышает его предельно допустимую величину, наличии неисправности устройства горизонтирования, а также в случае разряда автономного источника питания;
д) обеспечивает формирование сигналов управления приводом горизонтирования для приведения люльки в транспортное положение.
Применение электромеханического привода позволяет ограничиться передачей на люльку лишь электрической энергии с помощью традиционных кабельных барабанов. Это снимает ограничения на использование предложенного устройства горизонтирования на автоподъемниках с длинными телескопируемыми стрелами (коленами).
Применение самотормозящихся передач в приводе исключает неконтролируемые перемещения люльки при аварийных отключениях энергии питания привода, что повышает безопасность работы автоподъемника. К этому же результату приводит блокирование перемещения (в том числе подъема) люльки и остановка двигателя автоподъемника при наличии неисправности устройства горизонтирования, при возникновении опасности столкновения люльки с препятствиями, а также если угол наклона пола люльки превышает его предельно допустимую величину.
Реализация горизонтирования люльки в двух плоскостях, а также применение индикации и сигнализации положения люльки, обеспечивает расширение функциональных возможностей устройства.
Поэтому отличительные признаки предложенного технического решения находятся в прямой причинно-следственной связи с техническими результатами, на достижение которых направлено изобретение.
Под автоподъемником, в составе которого работает предложенное устройство горизонтирования, подразумевается автомобиль-вышка (автовышка), пожарная машина, автогидроподъемник (АГП) - автомобиль (реже - специальное шасси), оснащенный устройством для подъема и перемещения рабочих с инструментом и материалами и проведения работ в пределах зоны обслуживания. Его рабочим органом является коленчатый, телескопический либо комбинированный коленчато-телескопический подъемник с поворотной стрелой, оборудованный рабочей площадкой (так называемой люлькой, имеющей ограждение и предназначенной для размещения людей с инструментом и материалами). Управление подъемником осуществляется с рабочей площадки (из люльки) и из кабины автомобиля.
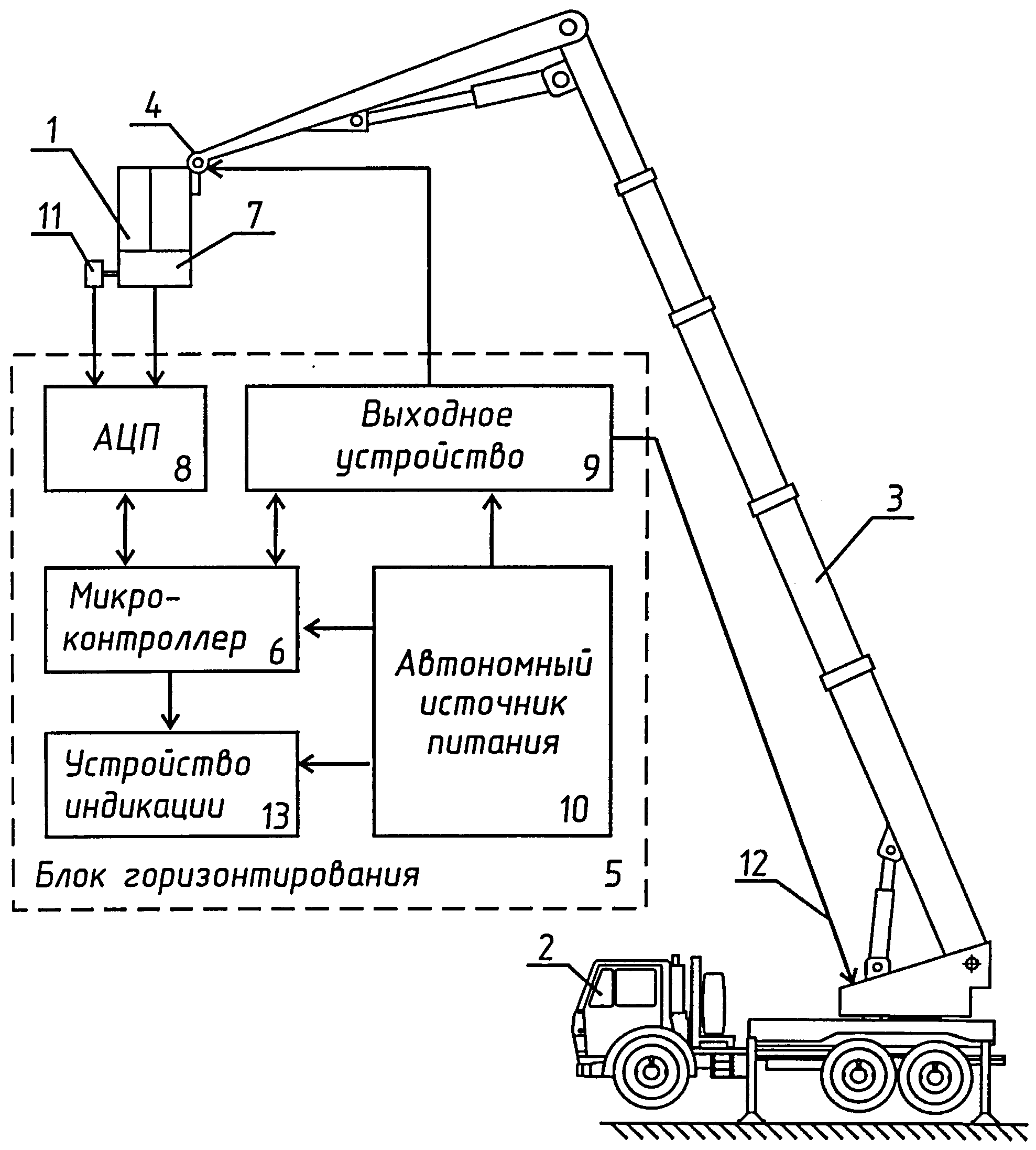
На чертеже изображена упрощенная функциональная схема устройства.
Устройство горизонтирования люльки 1 автоподъемника 2, закрепленной на верхнем колене или верхней секции его стрелового оборудования 3, содержит привод горизонтирования 4, установленный в узле крепления люльки.
Привод горизонтирования выполнен реверсивным электромеханическим с использованием коллекторного, бесколлекторного или асинхронного электродвигателя и самотормозящейся передачи. Например, винтовой передачи или червячного редуктора.
Электродвигатель соединен с электронным блоком горизонтирования 5, расположенным в люльке (или прикрепленным к люльке) и реализованным на основе микроконтроллера 6 и датчика угла наклона 7 пола люльки 1 относительно гравитационной вертикали.
Датчик угла наклона 7, реализованный, например, на основе микромеханического акселерометра, может быть выполнен в виде отдельного датчика, подключенного к блоку горизонтирования 5 - к его аналого-цифровому преобразователю (АЦП) 8. АЦП может входить в состав микроконтроллера 6.
Для усиления выходных сигналов микроконтроллера 6 до уровня, необходимого для управления электродвигателем привода горизонтирования 4, в состав блока горизонтирования входит выходное устройство 9, выполненное в виде набора силовых электронных ключей или электромагнитных реле с соответствующими интерфейсными схемами.
Устройство может получать электрическое питание от бортовой сети автоподъемника 2 (12, 24 или 220/380 В) через кабельный барабан, либо может иметь автономный источник питания (аккумулятор) 10, установленный в люльке 1 и/или прикрепленный к ней.
Привод горизонтирования 4, его электронный блок 5 и датчик угла наклона 7 могут быть выполнены двухкоординатными с возможностью горизонтирования пола люльки 1 в двух плоскостях - компенсации ее продольного и поперечного наклона. Привод 4 и узлы крепления люльки 1 могут иметь изолирующие вставки, обеспечивающие электрическую изоляцию люльки. Это обеспечивает возможность применения автоподъемника для выполнения работ с электрическими сетями, находящимися под напряжением.
Устройство горизонтирования может содержать также датчик 11 столкновения люльки 1 с препятствием (например, электромеханический датчик лобового удара), либо приближения к нему (ультразвуковой, оптический и т.п.). Выход этого датчика через блок горизонтирования 5 соединен с механизмом блокирования перемещения люльки (например, тормозом), встроенным, в частности, в привод горизонтирования 4.
По сигналу этого датчика 11 микроконтроллер 6 может формировать сигнал блокирования (отключения) работы приводов стрелового оборудования 3, который от выходного устройства 9 по проводной или беспроводной (по радиоканалу) линии связи 12 передается в систему управления перемещением люльки 1 автоподъемника 2 в вертикальном и горизонтальном направлениях.
В состав блока горизонтирования 5 может входить также устройство индикации 13, содержащее цифровой и/или аналоговый (стрелочный) указатель угла наклона пола люльки 1 и/или звуковой или световой аварийный сигнализатор превышения предельно допустимой величины этого угла.
Устройство может содержать также иные функциональные блоки, не показанные на чертеже. В том числе панель оператора (для формирования оператором сигналов управления), блок памяти регистратора параметров и часы реального времени, соединенные с микроконтроллером 6, а также элементы ограничителя предельного груза (ОПГ), анемометра, устройства ограничения зоны обслуживания, устройства блокирования подъема и поворота колен при не выставленном на опоры автоподъемнике, устройства блокировки подъема опор при рабочем положении стрелы, устройства аварийного опускания люльки при отказе приводов подъемника, переговорного устройства, счетчика времени наработки и т.д.
Устройство горизонтирования работает следующим образом.
При работе автоподъемника 2 перемещение люльки 1 с помощью приводов стрелового оборудования 3 в пределах рабочей зоны проводит к изменению углового положения верхнего колена или верхней секции стрелового оборудования автоподъемника и, соответственно, к изменению углового положения (наклону) люльки 1 (ее пола).
Этот наклон выявляется датчиком угла наклона 7.
Если его величина превысит предварительно установленную величину, например, 0,5…1°, предварительно записанную в энергонезависимую память микроконтроллера 6, то микроконтроллер формирует дискретный или пропорциональный (аналоговый, широтно-импульсный) сигнал управления электродвигателем, который через выходное устройство 9 поступает на привод горизонтирования 4.
Работающий реверсивный электромеханический привод 4, обеспечивая поворот люльки относительно оси крепления на стреловом оборудовании 3, приводит люльку в горизонтальное положение, что выявляется датчиком угла наклона 7. После чего микроконтроллер 6 осуществляет отключение сигнала управления электродвигателем. Люлька при этом остается в горизонтальном положении благодаря применению в приводе горизонтирования 4 самотормозящейся передачи.
Применение самотормозящейся передачи дополнительно позволяет увеличить продолжительность работы устройства горизонтирования при его питании от автономного источника (аккумулятора) 10.
Привод 4, электронный блок горизонтирования 5 и датчик угла наклона 7 могут быть выполнены двухкоординатными (двухосевой датчик наклона 7, двухканальный блок горизонтирования 5 и двухкоординатный привод горизонтирования 4 с двумя электродвигателями). В этом случае крепление люльки к верхнему колену или верхней секции стрелового оборудования 3 осуществляется с возможностью ее поворота в 2-х плоскостях, а устройство аналогичным образом обеспечивает горизонтирование пола люльки как при изменении пространственного положения стрелового оборудования 3, так и крена автоподъемника 2 (негоризонтальности его установки на опоры).
Величина отклонения пола люльки от горизонтального положения при этом отображается устройством индикации 13.
Если это отклонение превышает максимально допустимую величину, например 5°; также предварительно записанную в памяти микроконтроллера, то микроконтроллер 6 формирует сигнал аварийной сигнализации, поступающий на устройство индикации 13 и обеспечивающий информирование оператора в люльке о возникновении такой ситуации. Одновременно через выходное устройство 9 на привод горизонтирования 4 и на приводы рабочего оборудования 3 автоподъемника передаются сигналы остановки этих приводов. При необходимости осуществляется остановка двигателя автоподъемника.
Аналогичным образом, при опасном приближении люльки к какому-либо препятствию, а также при столкновении с ним, опасные перемещения люльки блокируются блоком горизонтирования 5 по сигналам с датчика 11.
Устройство горизонтирования может содержать встроенные средства самодиагностики его технического состояния. В этом случае при наличии неисправности какой-либо его составной части, в том числе при разряде автономного источника питания (если питание осуществляется не от бортовой сети автоподъемника), микроконтроллер 6 также формирует сигналы остановки приводом и, при необходимости, двигателя автоподъемника.
При необходимости приведения люльки в транспортное положение по сигналу оператора, поступающему на микроконтроллер 6 от системы управления автоподъемником по отдельной линии связи (на чертеже условно не показано), микроконтроллер формирует сигналы управления приводом 4 из условия приведения люльки в заданное транспортное положение. Контроль этого положения также осуществляется датчиком угла наклона 7.
Заявленное устройство горизонтирования допускает также иные варианты реализации на основе признаков, изложенных в его формуле.
Источники информации
1. Полосин М.Д. Устройство и эксплуатация подъемно-транспортных и строительных машин. - М.: ПрофОбрИздат, 2001. - 421 с.
2. RU 2230022 C2, B66C 23/00, B66C 23/66, 10.06.2004.
Электромеханический тяговый модуль гусеничной машины
Гусеничный трактор с электромеханической трансмиссией
Электромеханическая трансмиссия самоходной машины
Промышленный тракторный агрегат с электромеханической трансмиссией
Система электрооборудования гусеничной машины
Тракторный агрегат с системой ограничения доступа к его управлению
Моторно-трансмиссионная установка рабочей машины
Устройство для определения положения рабочего органа машины
Индикаторное устройство рабочей машины
Термокондуктометрический анализатор концентрации компонентов газовой смеси
Электромеханический тяговый модуль гусеничной машины
Гусеничный трактор с электромеханической трансмиссией
Электромеханическая трансмиссия самоходной машины
Промышленный тракторный агрегат с электромеханической трансмиссией
Система электрооборудования гусеничной машины
Тракторный агрегат с системой ограничения доступа к его управлению
Моторно-трансмиссионная установка рабочей машины
Устройство для определения положения рабочего органа машины
Индикаторное устройство рабочей машины
Термокондуктометрический анализатор концентрации компонентов газовой смеси

