Результат интеллектуальной деятельности: БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ СРЕДНЕЙ ТОЧНОСТИ
Вид РИД
Изобретение
Изобретение относится к области приборостроения и может найти применение в бесплатформенных инерциальных системах навигации (БИНС), в частности в бесплатформенных системах ориентации (БСО). При этом под чувствительными элементами (ЧЭ) средней точности понимаются гироскопические датчики угловой скорости с нестабильностью дрейфа 0,5-10 град/ч и акселерометры с нестабильностью нуля 1·10-3g-4·10-4g.
Технический результат - повышение точности.
Для достижения данного результата БСО содержит две вычислительные платформы, каждая из которых реализует свой закон управления. Одна из них осуществляет демпфирование по собственным ускорениям, ограниченным линейной функцией. Вторая использует оценки адаптивного фильтра Калмана для осуществления демпфирования ошибок. При этом если в первой платформе коэффициенты демпфирования выбираются большими, то во второй демпфирование осуществляется с малыми по величине коэффициентами.
Изобретение относится к области бесплатформенных инерциальных систем навигации (БИНС) для различных классов носителей от наземных до авиационных.
Уровень техники
Известна комплексная навигационная система (патент РФ №2265190, МПК 601С23/00) (КНС) летательного аппарата (ЛА), включающая в свой состав навигационные датчики и системы, работающие на различных физических принципах (в том числе от системы воздушных сигналов), а также вычислительно-логические блоки комплексной системы, обеспечивающие информационный обмен между датчиками и системами и расчет необходимых параметров состояния ЛА; блок формирования невязки, обеспечивающий сравнение однотипной информации, поступающей от различных измерителей. Ограничением изобретения является избыточный набор сложных и дорогостоящих элементов и, как следствие, дороговизна всей системы в целом и невозможность реализации автономного режима работы.
Использование малогабаритных БИНС с «грубыми» чувствительными элементами описано в ряде патентов США корпорации American GNC, например, в ряде патентов о малогабаритных микромеханических инерциальных измерительных устройствах (патенты США №6671648, 6522992, 6516283) и о способах обработки измерений параметров движения с их применением (патенты США №6697758, 6651027, 6494093, 6473713, 6427131). Основное внимание в этих патентах уделено представлению преимуществ по сравнению с обычными традиционными блоками чувствительных элементов, основанных на использовании внешних датчиков навигационной информации (типа GPS), использовании демпфирования ошибок вычислительной платформы и т.д. Основным недостатком данных систем является невозможность длительного автономного режима при отключении спутниковой навигационной системы (СНС), что принципиально важно при постановке искусственных помех.
Наиболее близким аналогом к предлагаемому устройству является бесплатформенная система ориентации на грубых чувствительных элементах (патент РФ №2382988 МПК 601С23/00). Данная система осуществляет демпфирование ошибок с использованием разности ускорений БИНС и СВС.
Основным недостатком такой системы является принципиальная невозможность автономного определения всех трех углов ориентации, а также не очень высокая точность их определения даже при наличии сигнала СВС.
Таким образом, главная задача изобретения - существенное повышение точности определения углов ориентации, а также возможность автономного их счисления.
Раскрытие изобретения
Для снижения указанных недостатков, влияющих на точность и автономность счисления углов ориентации, предлагается следующее техническое решение.
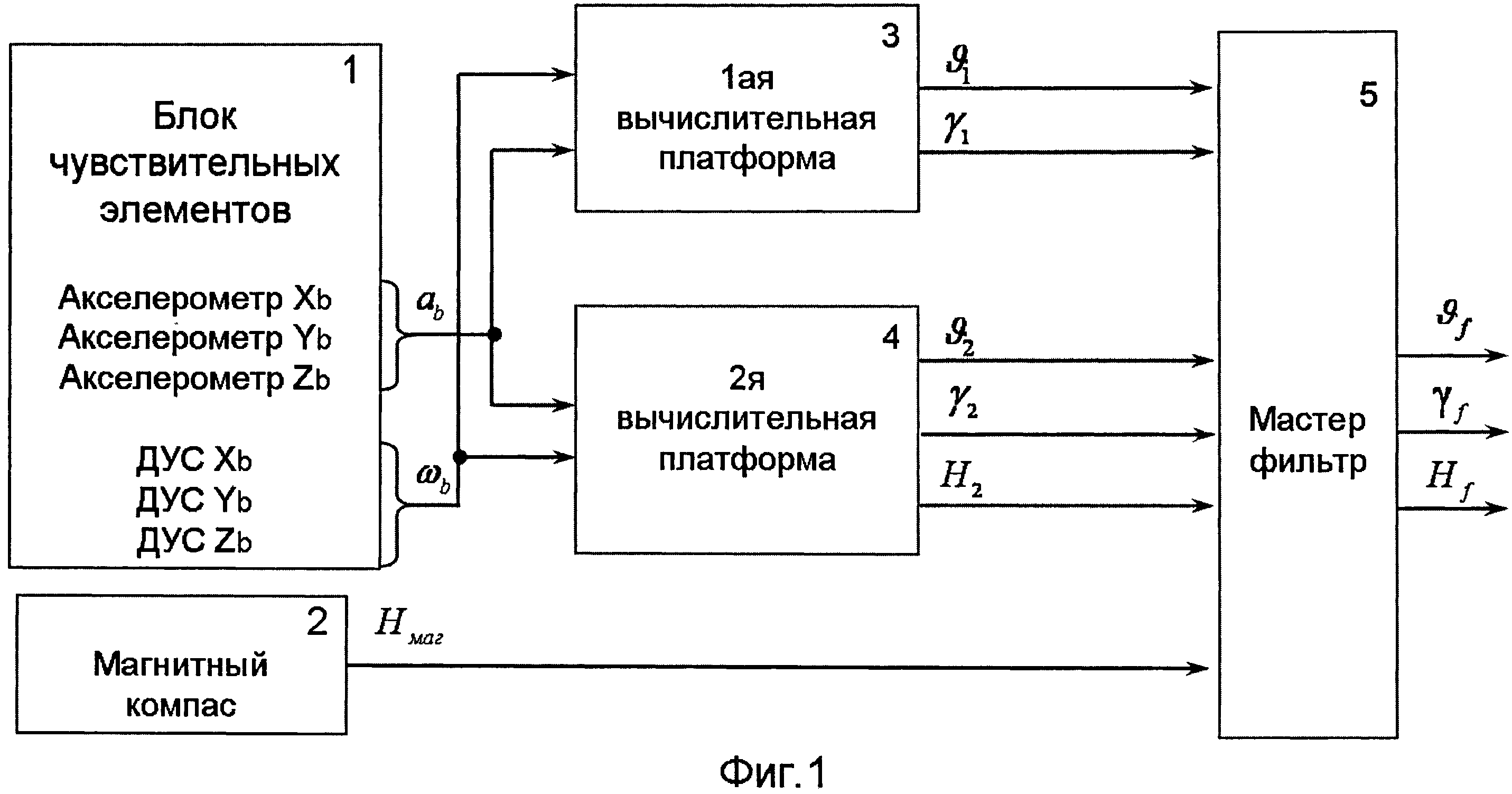
Технический результат достигается тем, что в БСО реализуются две вычислительные платформы, каждая из которых имеет свой закон управления (демпфирования ошибок), зависящий как от текущих составляющих горизонтальных ускорений, так и от оценок ошибок ускорений адаптивного фильтра Калмана. Для достижения технического результата устройство предлагаемой системы содержит блок ЧЭ, состоящий из трех акселерометров и трех датчиков угловых скоростей (ДУС), установленных по трем ортогональным осям, выносной магнитный компас, две вычислительные платформы и мастер-фильтр. Выходы блока чувствительных элементов соединены с соответствующими входами 1-й и 2-й вычислительной платформы. Выходы 1-й платформы по тангажу и крену и 2-й по тангажу, крену и курсу соединены с соответствующими входами мастер-фильтра. Выход магнитного компаса соединен с соответствующим входом мастер-фильтра.
Базовые реализации платформ и мастер-фильтра следующие.
Первая платформа содержит следующие блоки: блок пересчета ускорений из связанной в навигационную систему координат, блок вычисления линейных и угловых скоростей навигационной системы координат, 1-й блок кватернионных вычислений, 2-й блок кватернионных вычислений, блок формирования сигналов демпфирования, блок вычисления матрицы направляющих косинусов и углов ориентации. Выход блока чувствительных элементов по ускорениям соединен с соответствующим входом блока пересчета ускорений из связанной в навигационную систему координат, а выход блока ЧЭ по угловым скоростям соединен с соответствующим входом 1-го блока кватернионных вычислений, выход которого соединен с соответствующим входом 2-го блока кватернионных вычислений, выход которого соединен с соответствующим входом блока вычисления матрицы направляющих косинусов и соответствующим входом обратной связи первого кватернионного блока. Выход блока вычисления матрицы направляющих косинусов подается на соответствующий вход блока пересчета ускорений, выход которого поступает на соответствующие входы блока вычисления линейных и угловых скоростей и блока формирования сигналов демпфирования, выход которого поступает на вход 2-го кватернионного блока. Выход блока вычисления линейных и угловых скоростей поступает на соответствующий вход 2-го кватернионного блока. Выходы углов блока вычисления матрицы направляющих косинусов и углов ориентации являются выходами первой платформы. Вторая платформа аналогично первой платформе содержит блок пересчета ускорений, блок вычисления скоростей, первый и второй кватернионные блоки, блок вычисления матрицы направляющих косинусов и углов ориентации, блок демпфирования, а также дополнительно адаптивный фильтр Калмана. Выход сигналов линейных ускорений блока ЧЭ соединен с соответствующим входом блока пересчета ускорений, выход которого соединен со входом блока вычисления скоростей и соответствующим входом фильтра Калмана, выход которого соединен с соответствующим входом блока формирования сигналов демпфирования, выход которого соединен с соответствующим входом второго кватернионного блока. Выход блока вычисления скоростей соединен с соответствующим входом второго кватернионного блока. Выход блока ЧЭ по угловым скоростям соединен с соответствующим входом первого кватернионного блока, выход которого подается на соответствующий вход второго кватернионного блока, выход которого соединен с блоком вычисления матрицы направляющих косинусов и углов ориентации, а также в обратной связи с соответствующим входом первого кватернионного блока. Выходы углов блока матрицы направляющих косинусов и углов ориентации являются выходами второй платформы.
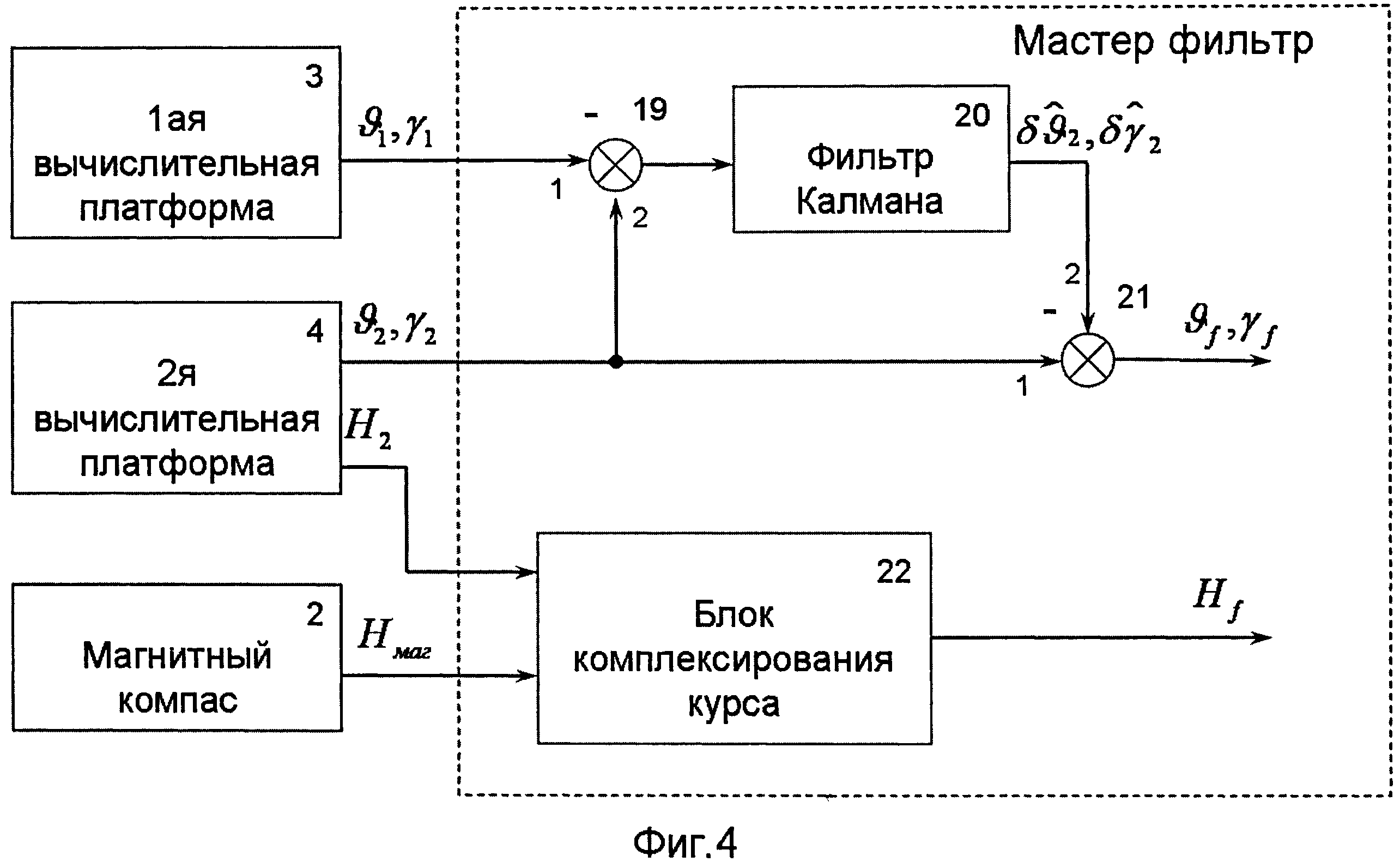
Мастер-фильтр содержит фильтр Калмана, блок комплексирования курса и два суммирующих устройства. Выход 1-й платформы подается на первый вход первого суммирующего устройства, выход 2-й платформы подается как на второй вход первого суммирующего устройства, так и на первый вход второго суммирующего устройства, на второй вход которого поступает выход из фильтра Калмана. Выход первого суммирующего устройства поступает на вход фильтра Калмана. Выходы магнитного компаса и 2-й вычислительной платформы поступают на соответствующие входы блока комплексирования курса. Выход всей системы является выходом второго сумматора и блока комплексирования курса.
Перечень чертежей
Фиг.1 - блок-схема верхнего уровня иерархии устройства предлагаемой системы.
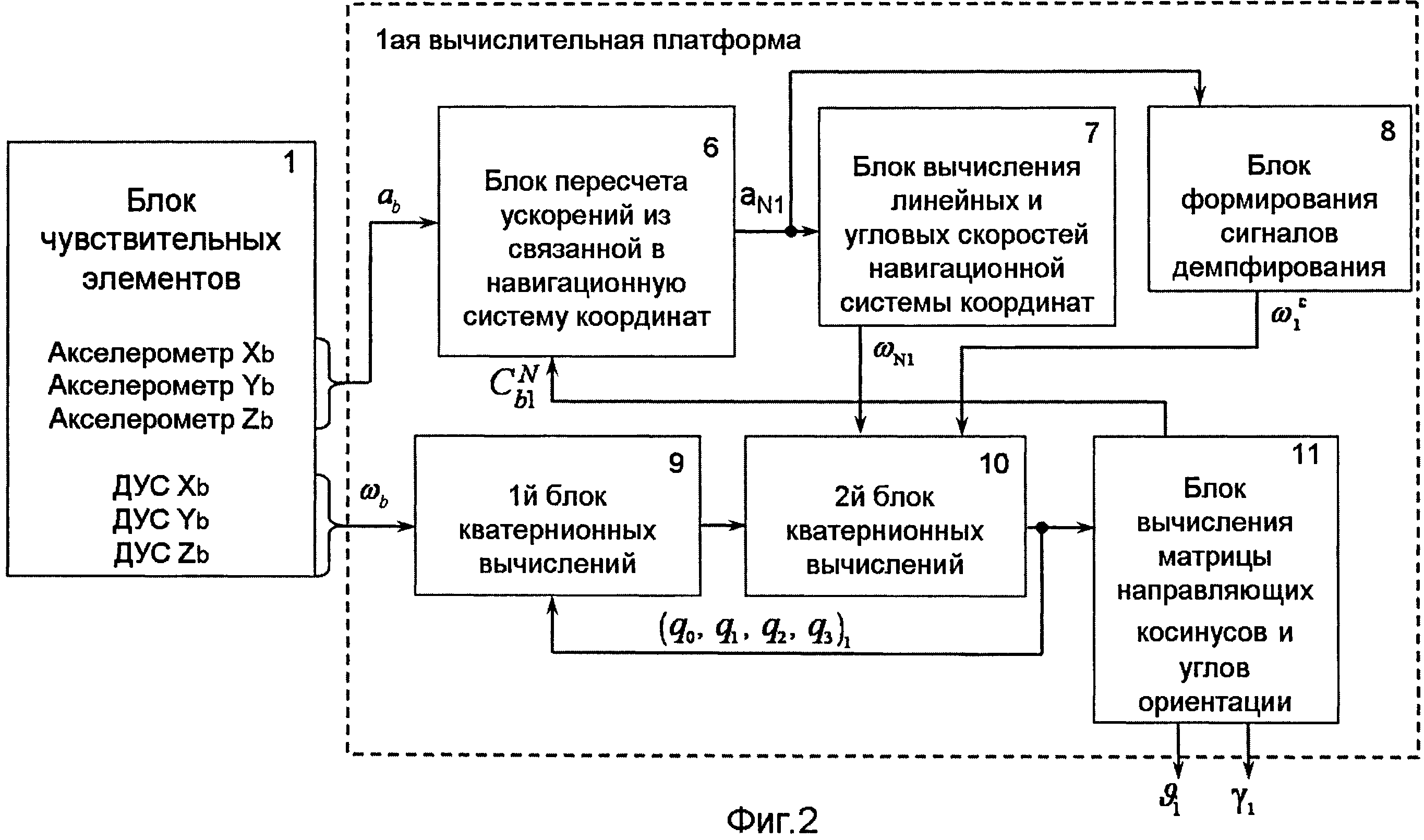
Фиг.2 - блок-схема устройства 1-й вычислительной платформы.
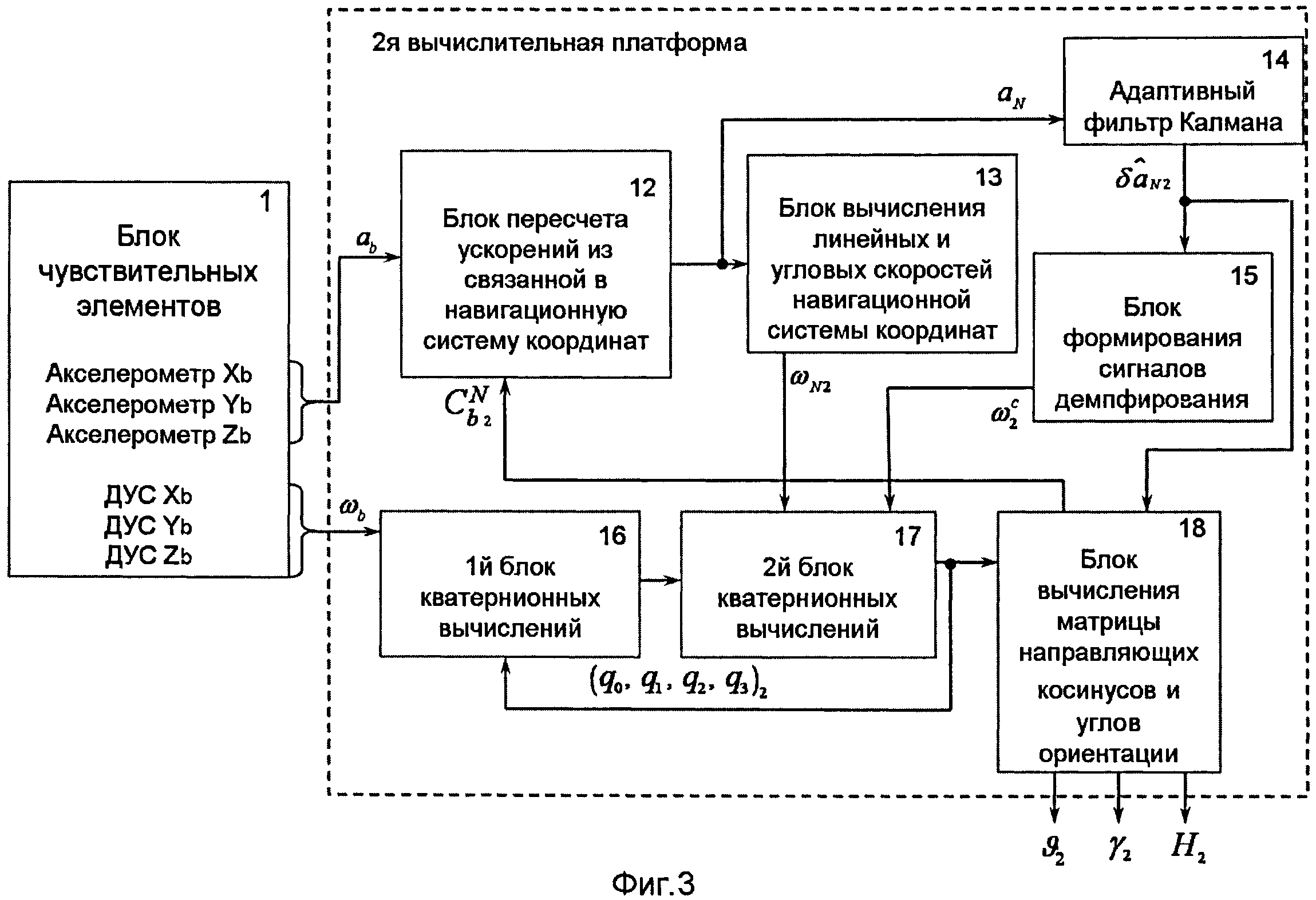
Фиг.3 - блок-схема устройства 2-й вычислительной платформы.
Фиг.4 - блок-схема устройства мастер-фильтра.
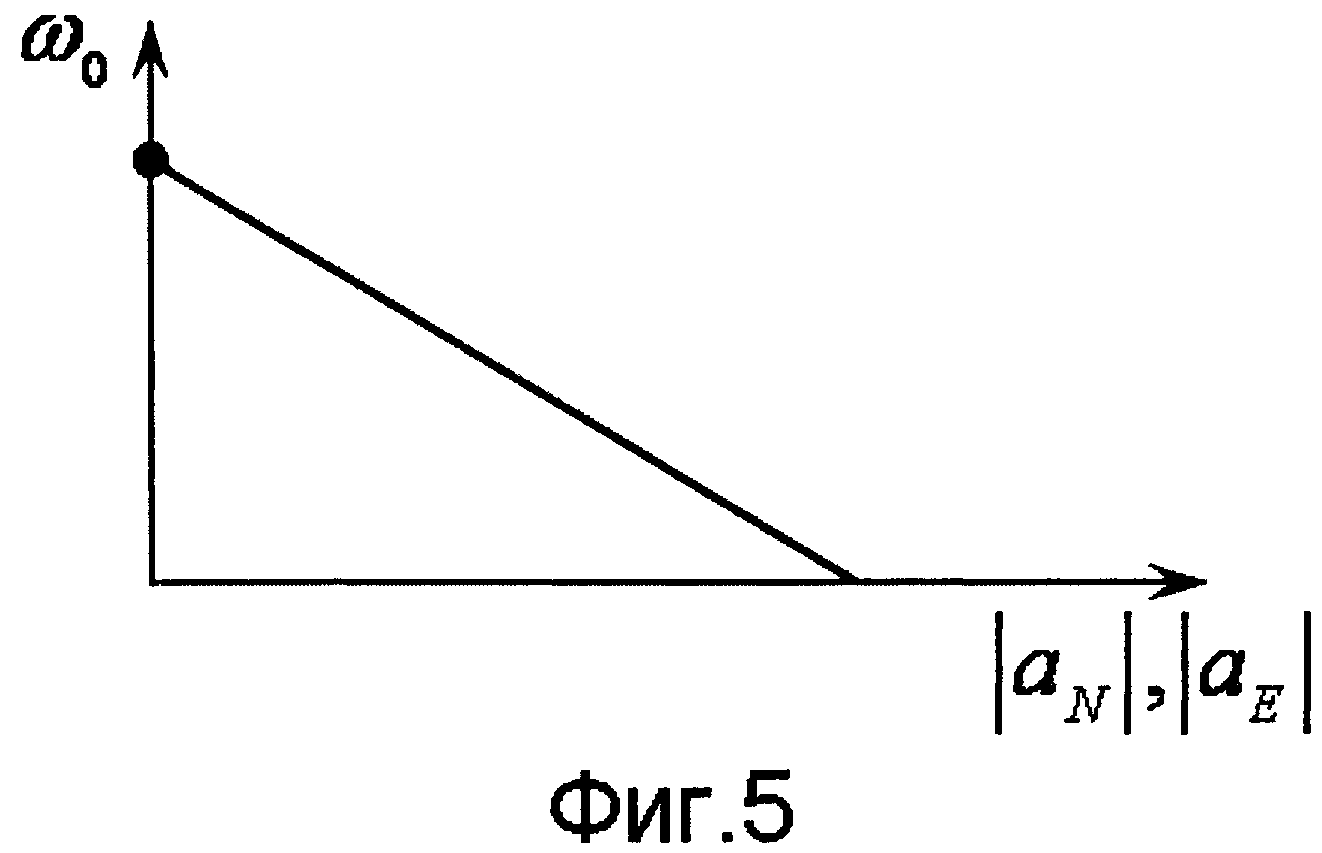
Фиг.5 - пропорциональный закон демпфирования первой платформы.
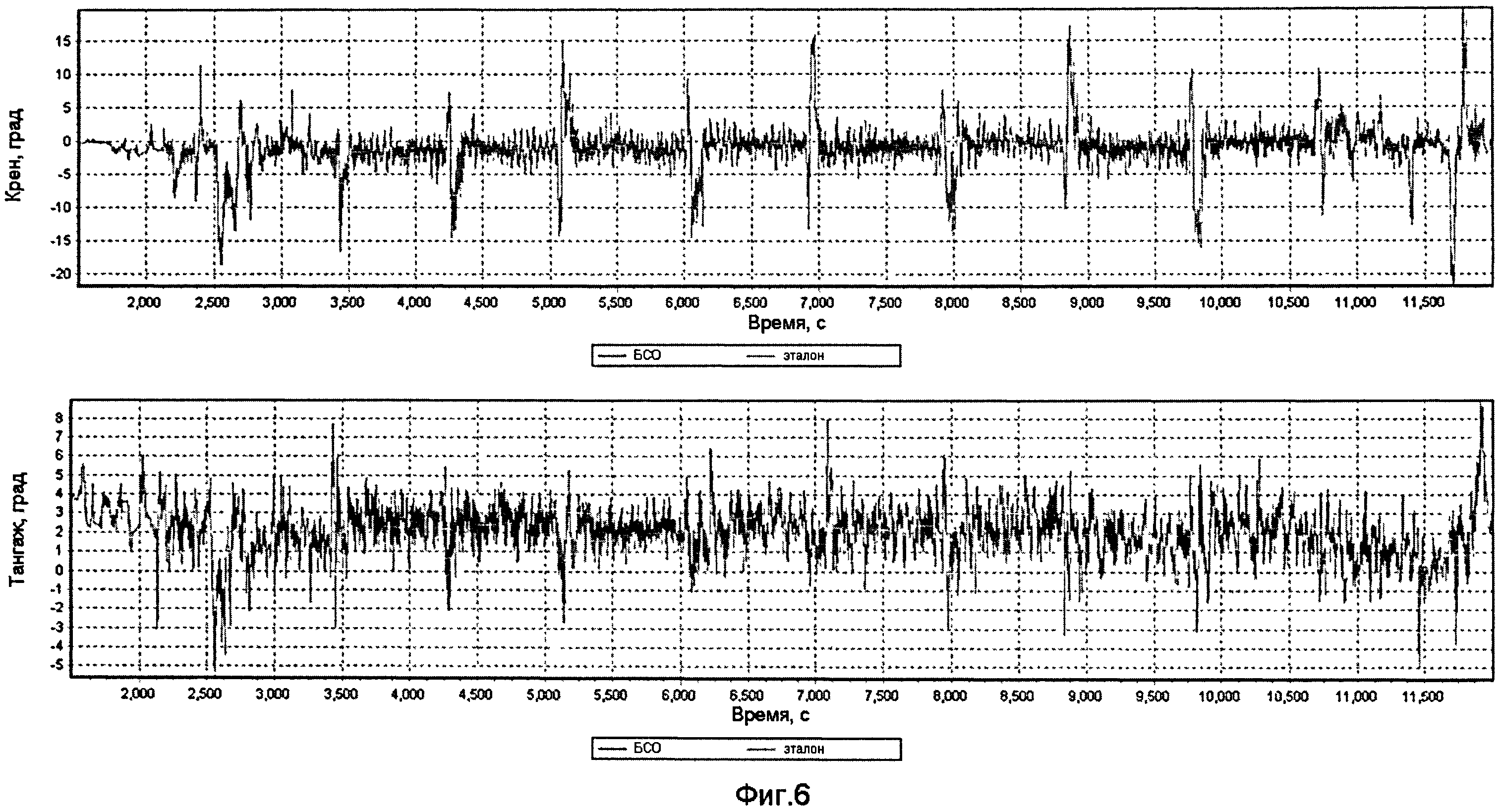
Фиг.6 - сравнение показаний крена и тангажа, полученных предлагаемым устройством и эталонной системой.
Осуществление изобретения
На Фиг.1-4 блоки системы имеют следующую сквозную нумерацию: 1 - блок чувствительных элементов трех акселерометров и трех датчиков угловых скоростей, размещенных по трем ортогональным осям; 2 - магнитный компас; 3, 4 - соответственно первая и вторая вычислительные платформы; 5 - мастер-фильтр; в первой вычислительной платформе 3: 6 - блок пересчета ускорений из связанной в навигационную систему координат; 7 - блок вычисления линейных и угловых скоростей навигационной системы координат; 8 - блок формирования сигналов демпфирования; 9, 10 - первый и второй блоки кватернионных вычислений; 11 - блок вычисления матрицы направляющих косинусов и углов ориентации; во второй вычислительной платформе 4: 12- блок пересчета ускорений из связанной в навигационную систему координат; 13 - блок вычисления линейных и угловых скоростей навигационной системы координат; 14 - адаптивный фильтр Калмана; 15 -блок формирования сигналов демпфирования; 16, 17 - первый и второй блоки кватернионных вычислений, 18 - блок вычисления матрицы направляющих косинусов и углов ориентации; в мастер-фильтре 5: 19, 21 - первый и второй суммирующие устройства, 20 - фильтр Калмана, 22 - блок комплексирования курса. На чертежах приняты следующие обозначения сигналов устройства: из блока 1: ab - кажущееся ускорение и ωb - угловая скорость объекта в связанной системе координат. На блок-схемах вычислительных платформ (i=1, 2 соответствует номеру платформы): aNi - ускорение и ωNi - угловая скорость объекта в навигационной системе координат платформы;  - управляющая угловая скорость для демпфирования ошибок платформы;
- управляющая угловая скорость для демпфирования ошибок платформы;  - матрица направляющих косинусов платформы; (q0,q1,q2,q3)i - кватернион поворота от связанной к навигационной системе координат платформы; ϑi - угол тангажа; γi - угол крена; Hi - угол курса. Также
- матрица направляющих косинусов платформы; (q0,q1,q2,q3)i - кватернион поворота от связанной к навигационной системе координат платформы; ϑi - угол тангажа; γi - угол крена; Hi - угол курса. Также  - оценка ошибки ускорения в навигационной системе координат, полученная адаптивным фильтром Калмана. На блок-схеме мастер-фильтра
- оценка ошибки ускорения в навигационной системе координат, полученная адаптивным фильтром Калмана. На блок-схеме мастер-фильтра  ,
,  - ошибки углов тангажа и крена, полученные фильтром Калмана; ϑf, γf, Hf - выходные значения тангажа, крена, курса.
- ошибки углов тангажа и крена, полученные фильтром Калмана; ϑf, γf, Hf - выходные значения тангажа, крена, курса.
Информационный и сигнальный обмен между входами-выходами блоков осуществляют по линиям связи, показанным на блок-схемах тонкими сплошными линиями. Линии связи представляют собой известные линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др. В качестве каналов передачи данных могут использоваться различные цифровые и аналоговые каналы, например каналы информационного обмена, выполненные в соответствии с ГОСТ 18977-79 (Комплексы бортового оборудования самолетов и вертолетов. Типы функциональных связей. Виды и уровни электрических сигналов).
Устройство системы
Для повышения точности и возможности автономной работы устройство системы собрано, запрограммировано, отлажено и работает следующим образом.
БСО решает задачу автономного определения угловой ориентации объекта на основе измерений, получаемых с помощью гироскопов и акселерометров, а также внешнего магнитного компаса. По измерениям, поступающим от единственного блока чувствительных элементов, каждая вычислительная платформа формирует собственное навигационное решение, которое является наилучшим (с точки зрения минимума среднеквадратической ошибки) для данного режима полета. Конкретно для первой платформы наименьшая величина ошибки достигается в крейсерском режиме, а для второй платформы в режиме маневрирования (γ>20º,  град/с). При этом параметры демпфирования меняются в зависимости от номера платформы, а также от величины (модуля) текущих ускорений. Комплексирование навигационных решений платформ позволяет сформировать единое решение, оптимальное (в среднеквадратическом смысле) для всей совокупности режимов полета носителя, фиксируемых его измеряемыми параметрами движения, и таким образом повысить точность определения углов ориентации. Кроме того, в данном устройстве не используется система воздушных сигналов (СВС), так что данное решение навигационной задачи является абсолютно автономным. Комплексирование двух платформ позволяет сформировать единое решение, оптимальное (в среднеквадратическом смысле) для всей совокупности режимов полета. На Фиг.2 представлена функциональная схема первой вычислительной платформы. Это базовая платформа, которая работает в своих базовых блоках пересчета ускорений, вычисления скоростей, первом и втором кватернионных блоках, блоке вычисления матрицы направляющих косинусов и углов ориентации. По величинам угловых скоростей ωb, измеренных датчиками угловой скорости блока 1, рассчитывают элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 9), а затем от инерциальной системы координат к навигационной (блок 10). По элементам кватерниона конечного поворота (q0, q1, q2, q3) в блоке 11 вычисляются элементы матрицы направляющих косинусов
град/с). При этом параметры демпфирования меняются в зависимости от номера платформы, а также от величины (модуля) текущих ускорений. Комплексирование навигационных решений платформ позволяет сформировать единое решение, оптимальное (в среднеквадратическом смысле) для всей совокупности режимов полета носителя, фиксируемых его измеряемыми параметрами движения, и таким образом повысить точность определения углов ориентации. Кроме того, в данном устройстве не используется система воздушных сигналов (СВС), так что данное решение навигационной задачи является абсолютно автономным. Комплексирование двух платформ позволяет сформировать единое решение, оптимальное (в среднеквадратическом смысле) для всей совокупности режимов полета. На Фиг.2 представлена функциональная схема первой вычислительной платформы. Это базовая платформа, которая работает в своих базовых блоках пересчета ускорений, вычисления скоростей, первом и втором кватернионных блоках, блоке вычисления матрицы направляющих косинусов и углов ориентации. По величинам угловых скоростей ωb, измеренных датчиками угловой скорости блока 1, рассчитывают элементы кватерниона конечного поворота от связанной системы координат к инерциальной (блок 9), а затем от инерциальной системы координат к навигационной (блок 10). По элементам кватерниона конечного поворота (q0, q1, q2, q3) в блоке 11 вычисляются элементы матрицы направляющих косинусов  перехода от связанной системы координат к навигационной, а также элементы кватерниона используют в блоке 9 на следующем шаге дискретных вычислений. В блоке 6 при помощи матрицы направляющих косинусов осуществляется пересчет ускорений ab, измеренных акселерометрами блока 1, в навигационную систему координат
перехода от связанной системы координат к навигационной, а также элементы кватерниона используют в блоке 9 на следующем шаге дискретных вычислений. В блоке 6 при помощи матрицы направляющих косинусов осуществляется пересчет ускорений ab, измеренных акселерометрами блока 1, в навигационную систему координат  .
.
Затем в блоке 7 осуществляют вычисление линейных и угловых скоростей навигационной системы координат, рассчитанные угловые скорости поступают на вход блока 10. Углы ориентации (тангаж, крен, курс) вычисляются в блоке 11 по элементам матрицы направляющих косинусов.
Аналогично первой платформе работает и вторая, но у нее есть существенное отличие в формировании сигналов демпфирования. Хотя реализация демпфирования разная и имеет разные параметры, но в обеих платформах сформированный сигнал демпфирования  поступает во второй блок вычисления кватернионов.
поступает во второй блок вычисления кватернионов.
В первой платформе демпфирование осуществляется в соответствии с законом, представленным на Фиг.5, с использованием показаний собственных ускорений навигационной системы. Формирование сигналов демпфирования осуществляется в блоке 8 по следующим уравнениям:
здесь обозначены  ,
,  - проекции управляющей угловой скорости
- проекции управляющей угловой скорости  для демпфирования ошибок платформы;
для демпфирования ошибок платформы;
 ,
,  - проекции ускорения aN у навигационной системы координат;
- проекции ускорения aN у навигационной системы координат;
K, Kb - параметры демпфирования, зависящие от текущего значения модуля ускорений (см. Фиг.5).
Указанные сигналы  ,
,  поступают на вход второго блока кватернионных расчетов (блок 10).
поступают на вход второго блока кватернионных расчетов (блок 10).
Осуществляемое таким образом автономное демпфирование будет обладать достаточно высокой точностью при крейсерском полете. Однако при осуществлении маневра первая платформа будет возмущаться собственными ускорениями. Чтобы избавиться от данной возмущаемости параметры демпфирования зависят от текущего ускорения в соответствии с законом, представленным на Фиг.5.
На Фиг.3 приведена функциональная схема второй платформы. Здесь все связи и блоки совпадают с первой вычислительной платформой за исключением введения дополнительного блока адаптивного (к параметрам движения носителя) фильтра Калмана (блок 14), на вход которого поступает ускорение навигационной системы. Основной особенностью второй платформы является фильтрация ускорений фильтром Калмана и оценка ошибок этих ускорений, после чего оценки подаются в качестве сигналов демпфирования на второй блок кватернионных вычислений (блок 17). При этом параметры демпфирования на два порядка меньше, чем в первой
платформе (например, K=0,03 с2/м, Kb=2·10-5 с/м), а уравнения демпфирования полностью совпадают с уравнениями для первой платформы. Отличием предлагаемого адаптивного фильтра Калмана от традиционного адаптивного фильтра является выбор ковариационной матрицы измерительных шумов от квадрата величины обновляемого процесса. Использование второй платформы позволяет осуществить точное счисление тангажа и крена в области высоких частот, а первая платформа обеспечивает точность счисления в области низких частот. Задачей комплексирования информации является выделение низкочастотных ошибок по разности измерений второй и первой платформ и компенсации их на выходе второй платформы, что и осуществляет мастер-фильтр.
В мастер-фильтре реализуется фильтр Калмана (блок 20), оценки которого поступают на сумматор (блок 21), выходы которого по тангажу и крену являются выходами БСО. Для определения текущего курса в блоке комплексирования (блок 22) реализуется следующее уравнение
Hf=H2+K·(Hмаг-H2),
здесь Hf - выходной курс;
Н2 - курс со второй платформы;
Hмаг - выходной сигнал магнитного курса.
Данное техническое устройство реализовано компанией «ТеКнол» в серийном изделии «КомпаНав-4». Это первое в России изделие, способное обеспечивать точное определение углов ориентации абсолютно автономно на базе микромеханических чувствительных элементов.
На Фиг.6, 7 представлены показания предлагаемой БСО по сравнению с эталонной системой (СБКВ) на базе волоконно-оптических гироскопов. Сравнение показаний систем позволяет сделать вывод о том, что предложенное устройство осуществляет точное определение тангажа и крена даже при отсутствии системы воздушных сигналов.
Система воздушных сигналов
Стартовая система предупреждения критических режимов одновинтового вертолета
Малогабаритная бесплатформенная инерциальная навигационная система средней точности, корректируемая от системы воздушных сигналов
Способ управления реактивным снарядом
Система воздушных сигналов вертолета
Среднемагистральный пассажирский самолет с системой управления общесамолетным оборудованием
Комплекс бортового оборудования вертолета
Система управления общесамолетным оборудованием
Пассажирский самолет с системой управления общесамолетным оборудованием и самолетными системами
Система управления общесамолетным оборудованием
Система воздушных сигналов
Стартовая система предупреждения критических режимов одновинтового вертолета
Малогабаритная бесплатформенная инерциальная навигационная система средней точности, корректируемая от системы воздушных сигналов
Система воздушных сигналов вертолета
Среднемагистральный пассажирский самолет с системой управления общесамолетным оборудованием
Комплекс бортового оборудования вертолета
Система управления общесамолетным оборудованием
Пассажирский самолет с системой управления общесамолетным оборудованием и самолетными системами
Система управления общесамолетным оборудованием
Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета

