Результат интеллектуальной деятельности: УСТРОЙСТВО, СОДЕРЖАЩЕЕ, ПО МЕНЬШЕЙ МЕРЕ, ТЕЛО И АМОРТИЗАТОР, И РОБОТ-ПЫЛЕСОС, СОДЕРЖАЩИЙ ТАКОЕ УСТРОЙСТВО
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству, содержащему, по меньшей мере, тело и амортизатор, который подвижно прикреплен к телу, чтобы защищать тело от удара, вызванного столкновением с препятствием во время перемещения устройства по поверхности, в котором амортизатор прикреплен к телу посредством, по меньшей мере, одной пружины, продолжающейся в направлении, которое, по меньшей мере, в основном перпендикулярно направлению, в котором амортизатор является подвижным относительно тела.
Изобретение также относится к роботу-пылесосу, содержащему такое устройство.
Амортизатор уменьшает удар по телу, но также и по препятствиям.
Описание предшествующего уровня техники
В US 2005/0021181 описан робот-пылесос, содержащий такое устройство, в котором тело приводится в действие двигателем, чтобы перемещать робот-пылесос по поверхности. Полукруглый кольцеобразный амортизатор для смягчения ударов, вызванных внезапными столкновениями с неожиданными препятствиями, прикреплен к телу. Амортизатор является подвижным относительно тела в одном заданном направлении.
Однако, когда робот-пылесос перемещается по поверхности, препятствия могут быть размещены в любом месте так, что направление удара может быть в любом направлении, параллельном поверхности, по которой робот-пылесос движется.
Удар в направлении, не параллельном направлению, в котором амортизатор является подвижным относительно тела, также может вызвать повреждение тела.
Такие проблемы возникают не только с роботами-пылесосами, но также с другими устройствами с приводом от электродвигателя или с ручным приводом, которые перемещаются по поверхности.
Кроме того, робот-пылесос согласно US-A1-2005/0021181 требует специальных направляющих элементов, чтобы направлять перемещение амортизатора относительно тела.
Задача и сущность изобретения
Задачей настоящего изобретения является создать устройство, в котором перемещение и направление амортизатора относительно тела осуществляется простым способом.
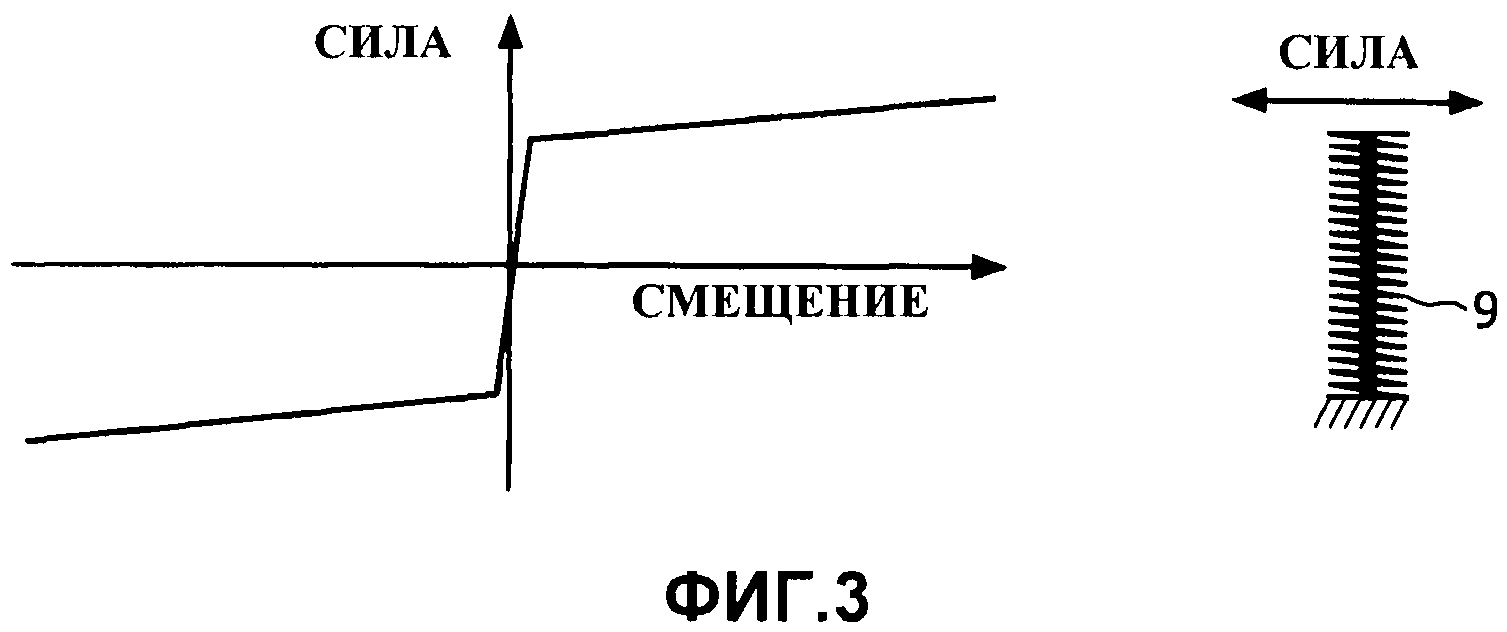
Эта задача достигается устройством согласно настоящему изобретению тем, что пружина (9, 25) является предварительно натянутой цилиндрической пружиной, работающей на растяжение, при этом пружина (9, 25) имеет относительно большую жесткость при силах ниже заданного значения и относительно малую жесткость при силах выше заданного значения.
За счет того факта, что пружина продолжается, по меньшей мере, в основном перпендикулярно направлению, в котором амортизатор является подвижным, пружина будет сгибаться, когда амортизатор перемещается относительно тела. Если пружина сгибается во всех направлениях параллельно поверхности, по которой движется тело, амортизатор будет также подвижным относительно тела во всех этих направлениях.
Кроме того, пружина работает как направляющее средство для перемещения амортизатора относительно тела, чтобы не требовалось отдельное направляющее средство.
Если пружина является цилиндрической пружиной, витки цилиндрической пружины, которые скользят друг по другу, осуществляют направление.
Подобные предварительно натянутые пружины, работающие на растяжение, получают со всякого рода характеристиками сила-смещение, когда они согнуты, чтобы можно было определить оптимальную пружину для любого конкретного требуемого поведения амортизатора относительно тела. Кроме того, такой тип пружин сжимает витки друг с другом, чтобы они создавали удовлетворительное направление для перемещения амортизатора относительно тела.
С такими отличительными признаками пружины амортизатор будет только немного перемещаться относительно тела, если, например, тело ускоряется. Однако, как только амортизатор ударяется о предмет с силой, действующей на амортизатор, которая больше, чем заданное значение, пружина проявляет относительно малую жесткость, таким образом облегчая легкое перемещение амортизатора относительно тела так, что тело хорошо защищено. Амортизатор, предпочтительно, является подвижным относительно тела на заданном расстоянии с относительно большой жесткостью, возникающей, по меньшей мере, на 20 процентах заданного расстояния. При работе жесткость должна быть относительно большой на расстоянии, которое является коротким, насколько это возможно, до определенного уровня силы. Жесткость будет меньше выше этого уровня силы.
Вариант осуществления устройства по изобретению отличается тем, что амортизатор является, по меньшей мере, в основном кольцеобразным и, по меньшей мере, в основном окружает тело.
С подобным амортизатором тело защищено со всех сторон, в то время как амортизатор является подвижным относительно тела во всех направлениях, продолжающихся параллельно поверхности. Расстояние, на котором амортизатор является подвижным во всех направлениях, зависит от пространства между амортизатором и телом в каждом направлении.
Другой вариант осуществления устройства по изобретению отличается тем, что амортизатор прикреплен к телу посредством, по меньшей мере, трех пружин, продолжающихся параллельно друг другу и, по меньшей мере, в основном перпендикулярных направлению, в котором амортизатор является подвижным относительно тела.
По меньшей мере, три пружины обеспечивают хорошее соединение и опору амортизатора относительно тела.
Еще один вариант осуществления устройства согласно изобретению отличается тем, что устройство содержит, по меньшей мере, один датчик для обнаружения смещения амортизатора относительно тела и стопорное средство для остановки перемещения тела, если обнаруженное смещение больше, чем заданное смещение.
Таким образом, дополнительное перемещение тела предотвращается, чтобы тело не было повреждено.
Другой вариант осуществления устройства согласно изобретению отличается тем, что тело содержит воронкообразную поверхность, в которой элемент, который соединен с амортизатором посредством пружины, скользит или катится.
Такая воронкообразная поверхность заставляет элемент скользить или катиться до самой нижней точки воронки, которая считается исходным положением. Как только амортизатор ударяется, амортизатор вместе с пружиной и элементом будет перемещаться относительно воронкообразной поверхности так, что элемент скользит или катится по воронкообразной поверхности до положения, которое выше, чем самая нижняя точка. Как только внешняя сила, действующая на амортизатор, удалена, элемент будет скользить или катиться назад по воронкообразной поверхности до самой нижней точки так, что также пружина и амортизатор, прикрепленный к элементу, возвращаются к своим исходным положениям.
Изобретение также относится к роботу-пылесосу, содержащему устройство, как описанное ранее. Тело является приводным с помощью электродвигателя таким роботом-пылесосом и перемещается по поверхности либо по заданному шаблону, либо произвольно. Во время перемещения по поверхности могут встретиться препятствия. В этом случае амортизатор перемещается относительно тела так, что пружина сгибается. Перемещение, предпочтительно, обнаруживается посредством датчика, после чего тело останавливается.
В WO 03/024292 описан автоматически перемещаемый коллектор пыли напольного типа. Коллектор имеет колпачок крышки, который имеет внутри подшипниковые опоры, на которых размещены пружины, которые продолжаются в вертикальном направлении. На противоположных концах эти пружины поддерживаются дном коллектора.
В ЕР 1582132 А2 описано механизированное бытовое чистящее устройство, которое включает в себя корпус, амортизатор и крышку. Цилиндрические пружины прикрепляют корпус к амортизатору. Основание корпуса имеет продолжающиеся вверх втулки, и цилиндрические пружины принимают втулки таким образом, что цилиндрические пружины являются продолжающимися вверх. Конусообразные отверстия в крышке корпуса принимают продолжающиеся вверх втулки основания и пружины, которые установлены на втулках.
В US 5903124 описано чистящее устройство, имеющее плиту основания чистящего устройства, и наружную крышку чистящего устройства. Один конец цилиндрической пружины посажен с натягом на столбик, поднимающийся на плите основания чистящего устройства, при этом другой конец посажен с натягом в соединительный элемент, который прикреплен с возможностью поворота к валу, закрепленному на поверхности потолка наружной крышки чистящего устройства посредством соединительного элемента вала.
Краткое описание чертежей
Изобретение будет теперь пояснено более подробно со ссылкой на сопровождающие чертежи, на которых
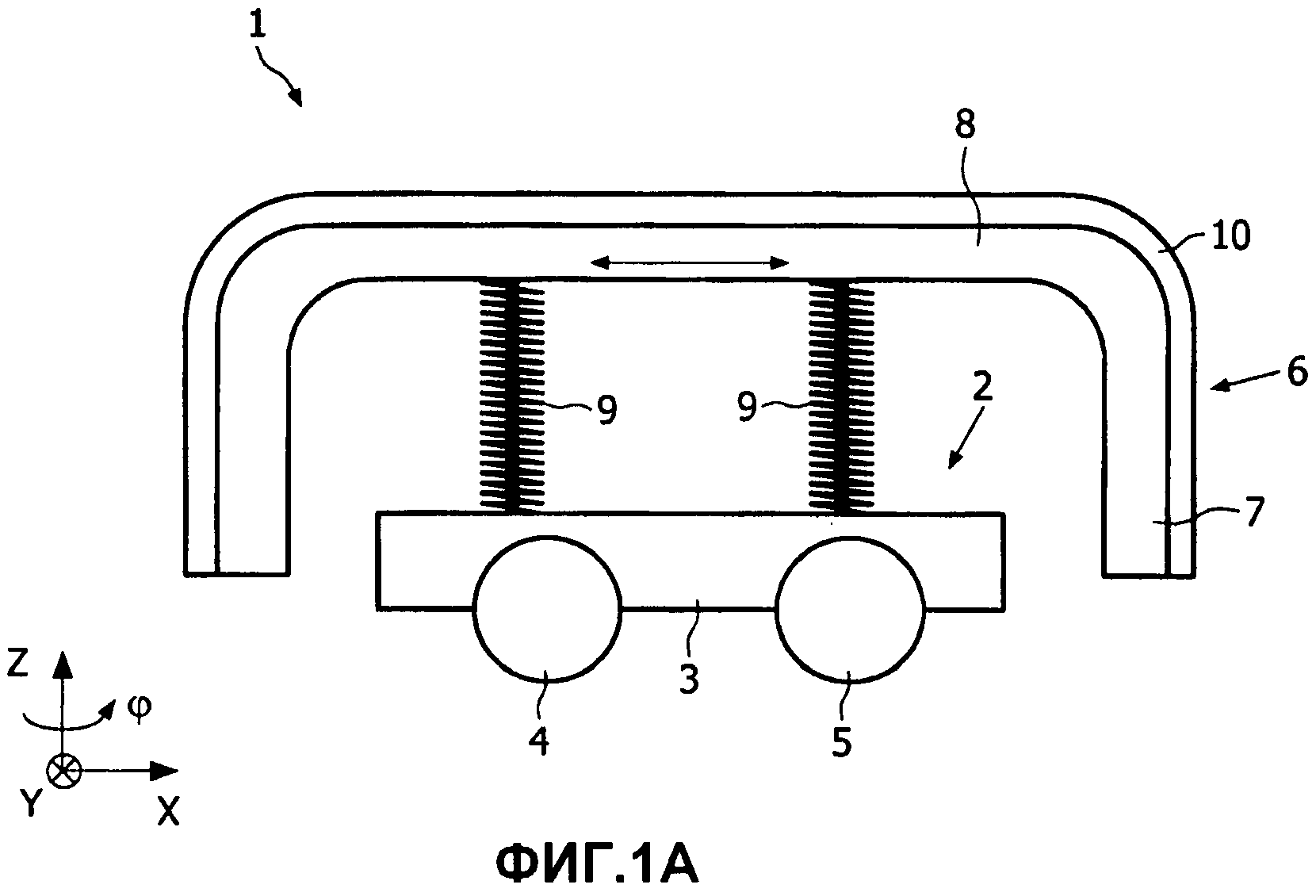
фиг.1А представляет собой разрез устройства согласно изобретению,
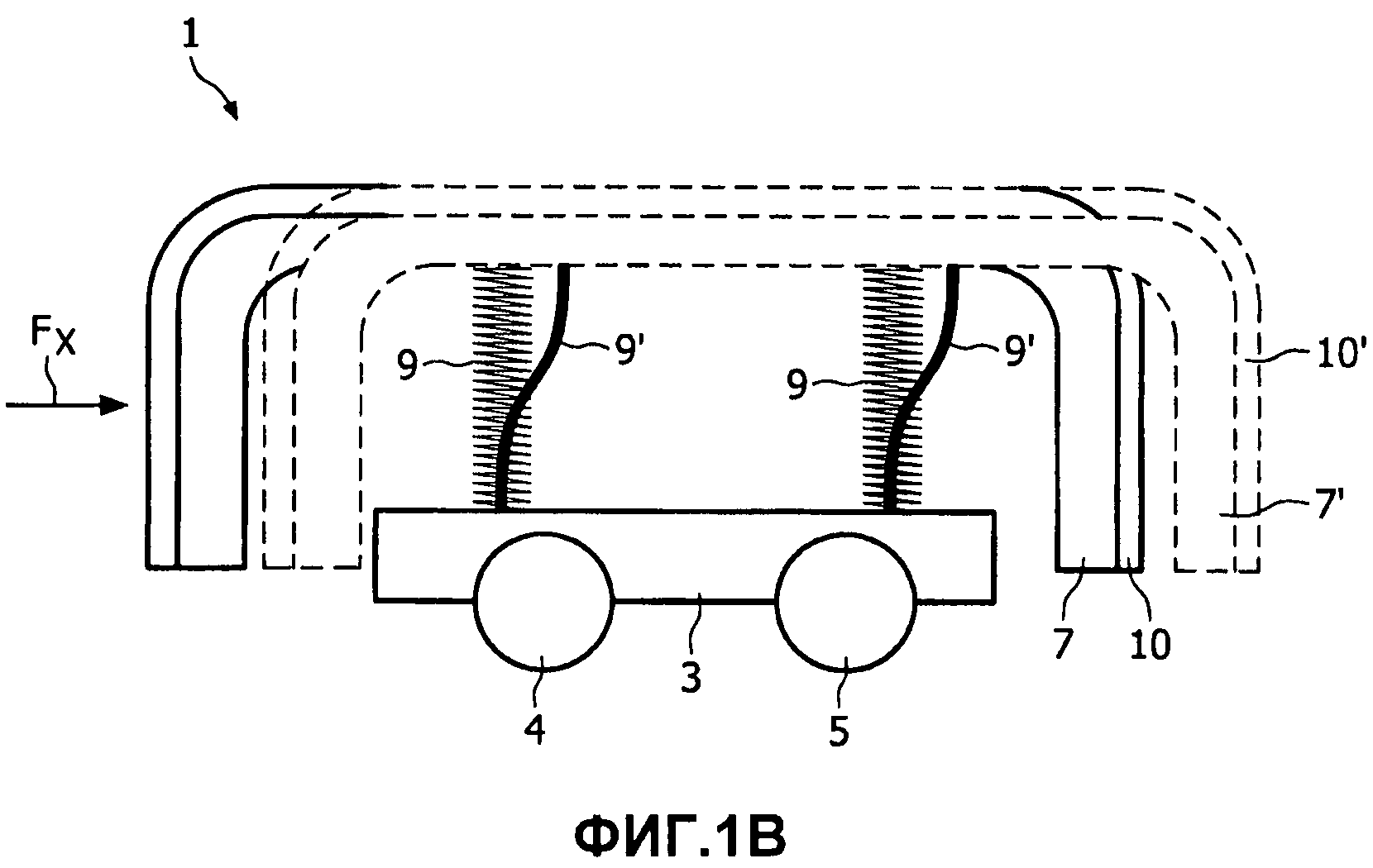
фиг.1В представляет собой разрез устройства, показанного на фиг.1А, с амортизатором, показанным в двух различных положениях относительно тела,
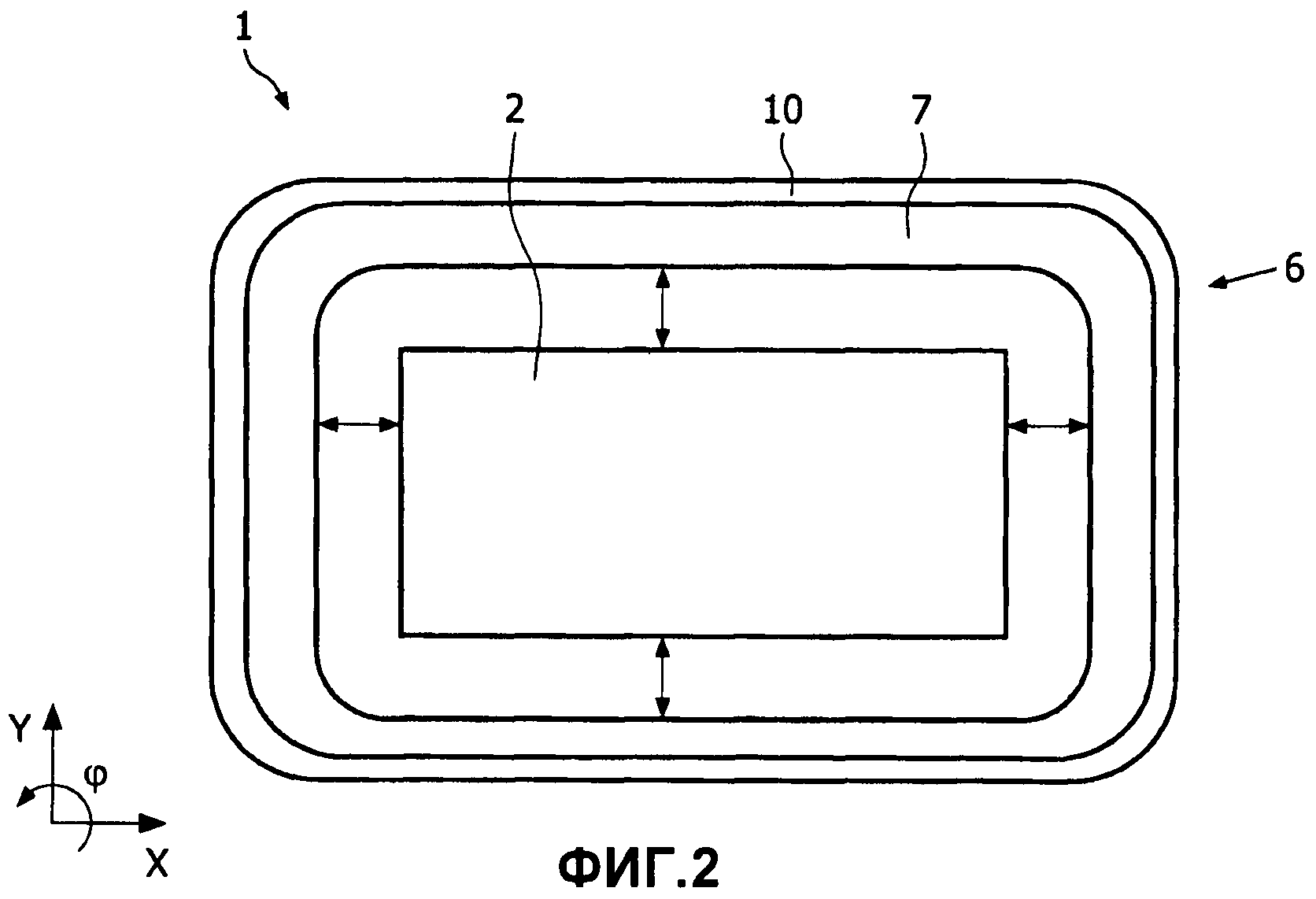
фиг.2 представляет собой вид сверху в разрезе устройства, показанного на фиг.1А,
фиг.3 представляет собой график, показывающий пружинную характеристику предварительно натянутой цилиндрической пружины, работающей на растяжение, в то время когда она сжата,
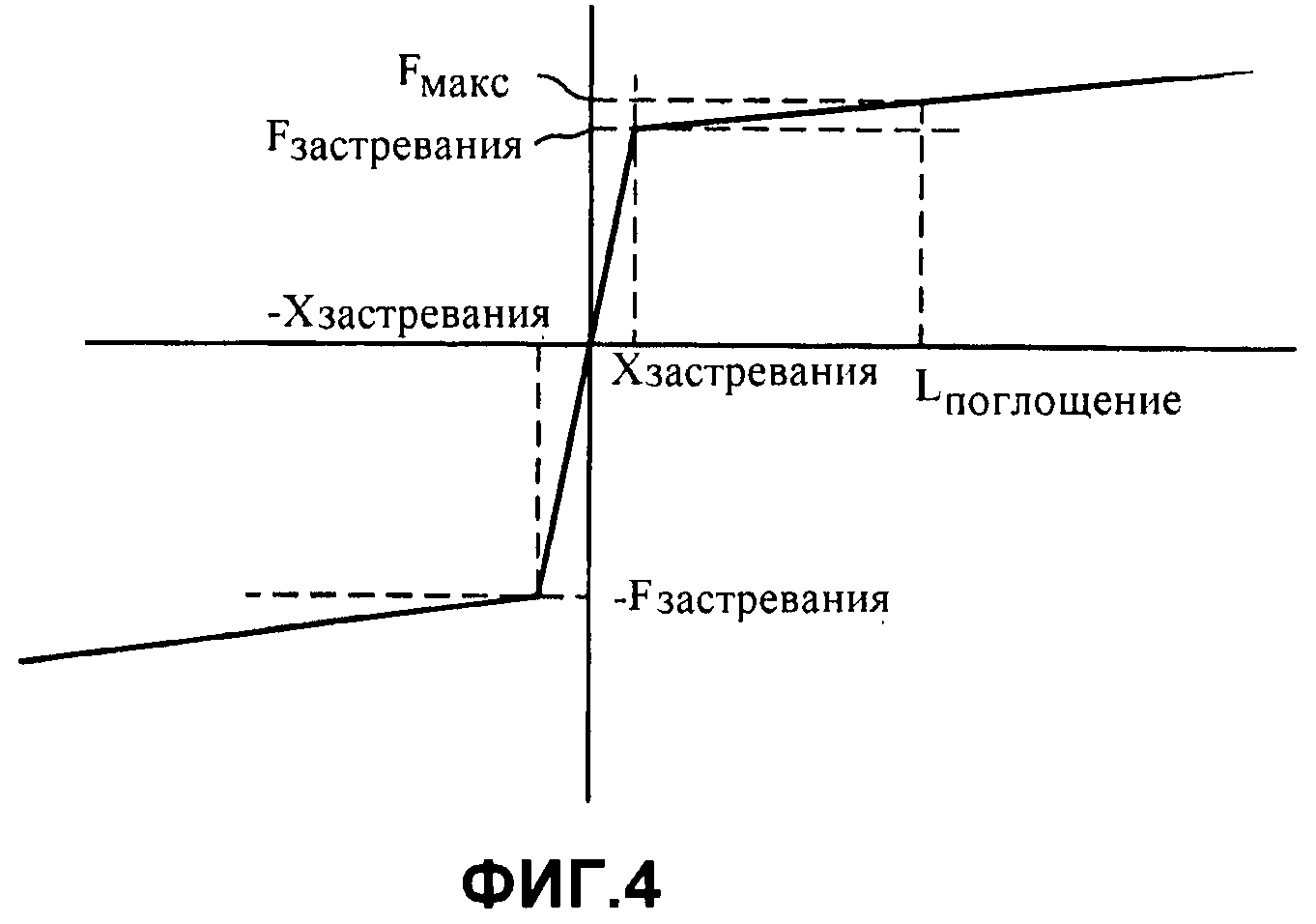
на фиг.4 показана пружинная характеристика, подобная той, что показана на фиг.3,
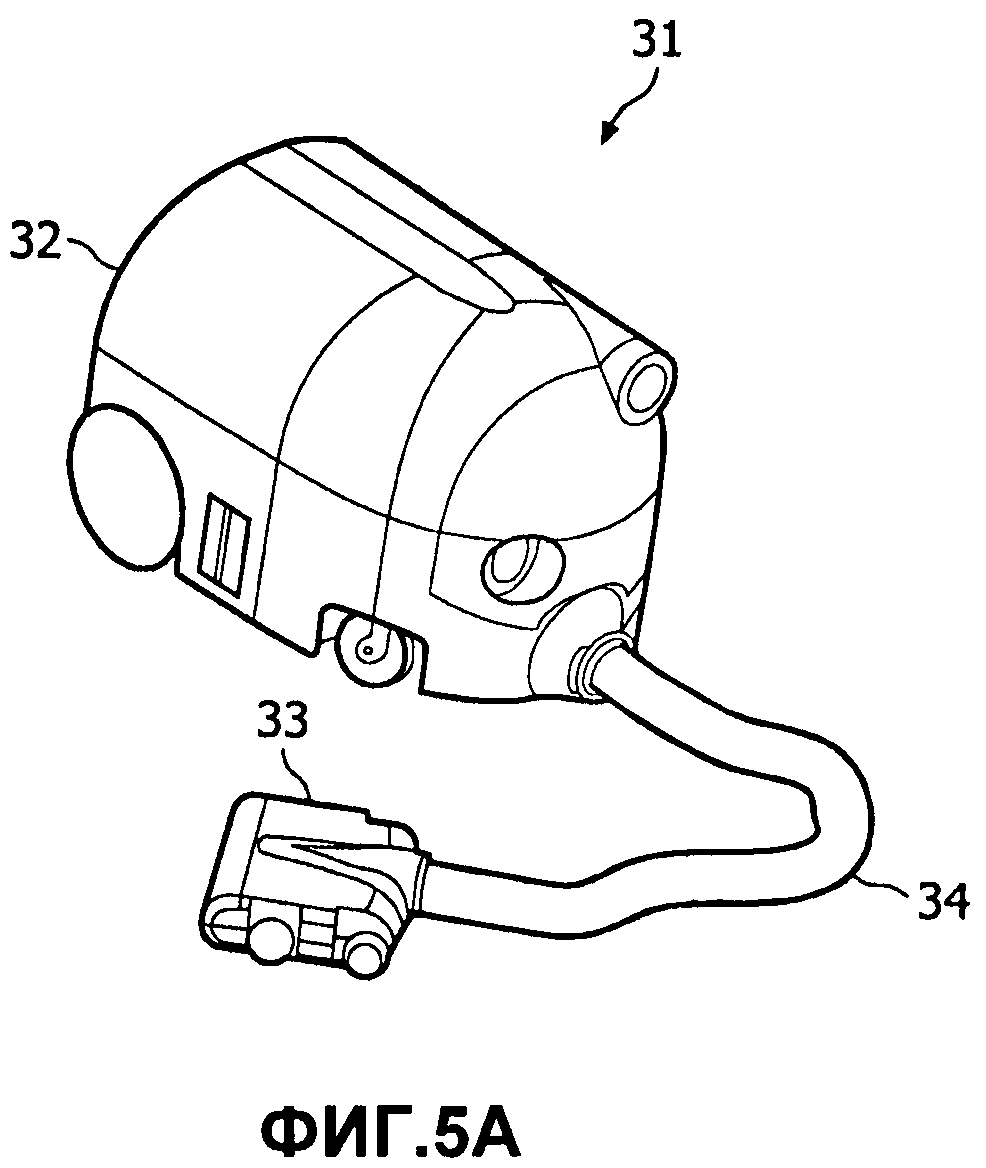
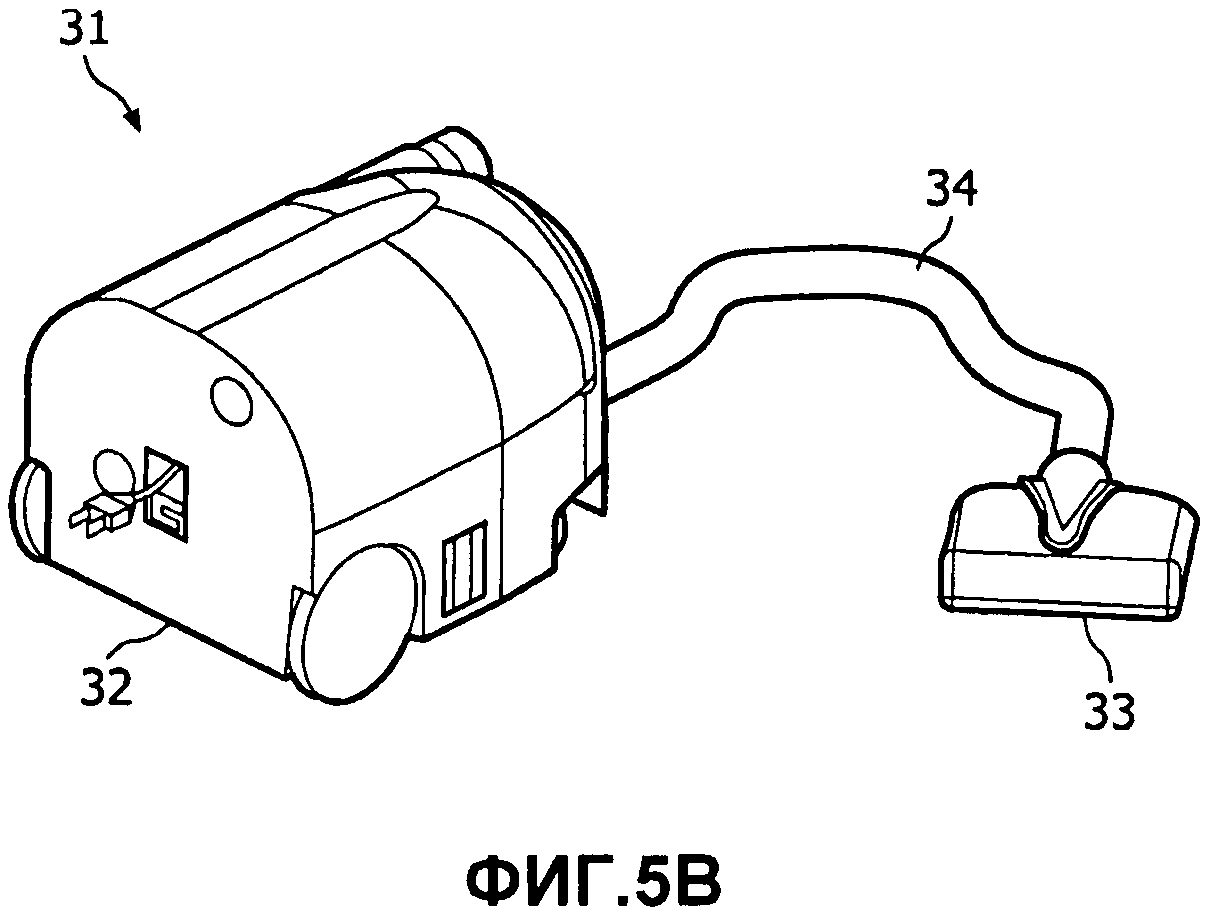
фиг.5А и 5B представляют собой вид спереди в перспективе и вид сзади в перспективе, соответственно, варианта осуществления робота-пылесоса согласно изобретению.
Описание предпочтительного варианта осуществления изобретения
На чертежах идентичные части обозначены одними и теми же ссылочными позициями.
На фиг.1А, 1В и 2 показано устройство 1 согласно изобретению, содержащее тело 2, приводимое с помощью электродвигателя, с корпусом 3 и двумя парами вращающихся колес 4, 5, расположенных на противоположных сторонах корпуса 3. Устройство 1 также содержит амортизатор 6, который соединен с телом 2 посредством четырех вертикально продолжающихся цилиндрических пружин 9. Амортизатор 6 содержит кольцеобразную часть 7, окружающую тело 2 и размещенную на расстоянии от тела 2, причем кольцеобразная часть 7 соединена с частью 8 крышки, с которой соединены пружины 9. Наружная поверхность амортизатора 6 выполнена с сенсорным слоем 10, функция которого будет описана ниже.
Как ясно видно на фиг.2, расстояния между кольцеобразной частью 7 и телом 2 по обеим сторонам тела 2 являются одинаковыми. Расстояния в направлении Х и направлении Y также являются одинаковыми. Однако расстояния в направлении Х и направлении Y могут отличаться, в зависимости, например, от имеющегося пространства для тела 2 и амортизатора 6 и от ожидаемых ударных сил в различных направлениях.
На фиг.3 показана вертикально продолжающаяся предварительно натянутая цилиндрическая пружина 9, работающая на растяжение, на которую сила действует в направлении, указанном двойной стрелкой. За счет этой силы пружина 9 будет сгибаться так, что витки пружины будут скользить поверх друг друга и будут смещены относительно друг друга. Типичная характеристика сила-смещение такой пружины 9 показана на графике, на котором пружина 9 имеет относительно большую жесткость при относительно малых силах, определяемую как сила, поделенная на смещение. После некоторого смещения требуется только относительно малая сила, чтобы получить относительно большое смещение пружины 9. В этой части графика пружина 9 имеет относительно маленькую жесткость. Как только сила удалена с пружины 9, пружина 9 вернется в свое исходное положение под влиянием внутренних сил.
На фиг.4 показан график, подобный графику на фиг.3, показывающий значения смещения и силы.
Когда устройство 1 перемещается по поверхности посредством приводимого с помощью электродвигателя тела, требуется, чтобы амортизатор 6 не вибрировал слишком сильно относительно тела 2. Это требуется как с эстетической точки зрения, но также и с точки зрения управления перемещениями. Поэтому желательно, чтобы пружины 9 проявляли относительно большую жесткость таким образом, чтобы ограничить смещение амортизатора 6 относительно тела 2 во время обычного перемещения тела 2 по поверхности. Во время таких обычных перемещений сила, оказываемая амортизатором 6 на пружины 9, должна быть меньше, чем Fstick(застревания), где Fstick должна быть больше, чем масса Мамортизатора, умноженная на максимальное ускорение Amax тела 2. В практической ситуации введен запас c коэффициентом 3, чтобы учесть, например, некруглость колеса и т.п., что может привнести дополнительные вибрации и, следовательно, ускорения.
В одном примере Fstick равно 2N, в то время как Xstick равно 0,2 мм, так что жесткость при почти нулевых силах равна 10 N/mm (Н/мм).
Как только амортизатор ударяется о препятствие во время перемещения тела 2 по поверхности, например, на амортизатор 6 действует сила Fx (см. фиг.1В), за счет которой амортизатор 6 перемещается из своего исходного положения в положение, показанное пунктирной линией на фиг.1В. Пружины 9 затем сгибаются до формы, обозначенной 9'.
Амортизатор 6 будет перемещаться только относительно тела 2, если Fx больше, чем F stick(застревания). Как только сенсорный слой 10 касается препятствия, процессор (не показан) посылает сигнал на приводимое с помощью электродвигателя тело 2, чтобы перемещение тела 2 было остановлено, поменялось на обратное или изменилось. Во время этого процесса тело 2 будет перемещаться немного дальше в направлении препятствия, за счет чего амортизатор 6 будет перемещаться относительно тела 2, пока он не упрется в тело 2. Амортизатор 6 затем перемещается относительно тела 2 на расстояние Labsorption (поглощения), при котором возникает максимально допустимая сила Fmax, действующая на амортизатор 6.
Labsorption зависит от критерия безопасность/повреждение, скорости и тормозных свойств устройства. Обнаружено, что для устройства весом 4 kg (кг), перемещающегося со скоростью 0,3 m/s (м/с), расстояние поглощения Labsorption, равное 10 мм (mm), является достаточным. Для такого устройства весом 4 кг, с Labsorption, равной 10 мм, было обнаружено, что 4 Н (N) является соответствующим значением для Fmax.
Поскольку пружины 9 могут сгибаться не только в направлении Х, но также и в направлении Y, амортизатор 6 может быть перемещен относительно тела в направлениях Х-, Y- и φ.
На фиг.5А и 5В показан вариант осуществления робота-пылесоса 31 согласно изобретению, содержащего два основных устройства, аналогичных стандартному вакуумному пылесосу: модуль 32, содержащий модуль вентилятора и контейнер для пыли, и модуль 33 чистящей головки, соединенный с модулем 32 через шланг 34. Модули 32, 33 можно рассматривать как тела, которые перемещаются по поверхности. Каждый модуль 32, 33 выполнен с амортизатором 6, как показанный на фиг.1А, 1В и 2, чтобы уменьшить при работе удары о тело, когда встречается препятствие. Амортизатор также уменьшает удары о препятствия.
Амортизатор 6 не виден на фиг.5А и 5В. Амортизатор 6 будет, по меньшей мере, в основном окружать модули 32, 33, таким образом, оставляя пространство для шланга 34.
В итоге устройство содержит, по меньшей мере, тело и амортизатор, который подвижно прикреплен к телу, чтобы защищать тело от удара, вызванного столкновением с препятствием во время перемещения устройства по поверхности. Амортизатор прикреплен к телу посредством, по меньшей мере, одной пружины, продолжающейся в направлении, которое, по меньшей мере, в основном перпендикулярно направлению, в котором амортизатор является подвижным относительно тела. Кроме того, выполнен робот-пылесос, содержащий такое устройство.
Для специалиста в данной области техники будет очевидно, что объем изобретения не ограничен примерами, описанными здесь ранее, при этом некоторые изменения и усовершенствования возможны, не выходя за объем настоящего изобретения, как он определен в приложенной формуле изобретения. Хотя настоящее изобретение было проиллюстрировано и описано подробно на чертежах и в описании, такие иллюстрации и описание приведены только в качестве примера и не должны расцениваться как ограничивающие. Настоящее изобретение не ограничено описанными вариантами осуществления изобретения. Изменения описанных вариантов осуществления изобретения могут быть поняты и осуществлены специалистом в данной области техники при выполнении заявленного изобретения, исходя из изучения чертежей, описания и приложенной формулы изобретения. В формуле изобретения использование глагола «содержит» и его спряжений не исключает этапы или элементы, отличные от тех, которые указаны в формуле изобретения, при этом неопределенные артикль «а» или «an» (один) не исключает множество. Простой факт того, что некоторые признаки упомянуты во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих признаков не может быть использована, чтобы получить преимущество. Любые ссылочные обозначения в формуле изобретения не должны рассматриваться как ограничивающие объем настоящего изобретения.
Устройство для термотерапии ткани
Всасывающее устройство и автономный пылесос
Способ извлечения данных из набора данных медицинских изображений
Медицинские системы и способы видеосвязи
Сборка светоизлучающих диодов
Сид с частицами в герметике для повышенного извлечения света и нежелтого цвета в выключенном состоянии
Устройство для нагревания текучей среды в емкости
Биореакторное устройство для выращивания зависящих от энергии освещения биологических видов и способ выращивания зависящих от энергии освещения биологических видов
Устройство микроэлектронного датчика
Система и способ детектирования
Способ и устройство для поддержки принятия решения на базе случаев
Система, содержащая устройство для обработки кожи и док-станция для устройства для обработки кожи

