Результат интеллектуальной деятельности: ИМИТАТОР ЛОЖНОЙ РАДИОЛОКАЦИОННОЙ ЦЕЛИ ПРИ ЗОНДИРОВАНИИ СИГНАЛАМИ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ
Вид РИД
Изобретение
Изобретение относится к радиолокации, а именно к устройствам, предназначенным для имитации частотно-временной структуры радиолокационного сигнала, отраженного от подстилающей поверхности, от одной или нескольких целей, находящихся на фиксированном направлении, и может быть использовано, например, для имитации ложных целей, в том числе расположенных ближе носителя, для имитации боевой работы радиолокационной системы (РЛС), а также для имитации эхо-сигналов радиовысотомеров (РВ) - измерителей высоты полета, работающих с сигналами с линейной частотной модуляцией (ЛЧМ).
В зависимости от типа сигнала и способов сканирования РЛС оптимальными будут различные методы и алгоритмы формирования имитирующего сигнала. Для РЛС импульсного излучения форма зондирующего сигнала, как правило, постоянна и точно известна, поэтому отраженный сигнал может быть заранее подготовлен в сигнальной памяти с учетом параметров моделирования и выдан на вход РЛС по сигналу пикового детектора, обнаруживающего начало зондирующего импульса. В современных РЛС для получения дополнительной информации о целях могут использовать частотную модуляцию с переменными параметрами. Поэтому расчет отраженного сигнала и последующее его воспроизведение необходимо выполнять в реальном масштабе времени на основе принимаемой реализации сигнала, сохраняя возможность последующей когерентной обработки в РЛС.
Аналогично, в большинстве РВ с ЛЧМ в настоящее время реализуется следящий прием отраженного сигнала со стабилизацией дальномерной частоты за счет изменения параметров модуляции. При этом параметры зондирующего сигнала при данных параметрах движения над поверхностью с заданными статистическими характеристиками имеют случайные вариации, обусловленные случайным характером даже мелких шероховатостей подстилающей поверхности. Этот факт исключает возможность предварительного расчета отраженного сигнала даже в случае детерминированной траектории движения и имитируемого рельефа подстилающей поверхности.
Это приводит к необходимости прямой имитации отраженного сигнала как суммы сигналов, отраженных различными достаточно малыми по сравнению с облучаемой площадью участками поверхности или эквивалентными блестящими точками.
Известно устройство для имитации радиолокационных портретов реальных целей [1. стр.134-135, рис.5.2], в котором зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает через приемную антенну, усилитель, устройство грубой задержки, устройство точной задержки, набор модуляторов и сумматор на выход имитатора. Устройство грубой задержки осуществляет задержку по времени, соответствующую расстоянию до ближайшей блестящей точки имитируемой цели. Линия задержки с отводами обеспечивает имитацию блестящих точек цели. Амплитудные и фазовые модуляции выполняются с помощью эталонных сигналов, соответствующих характеристикам целей. С выхода модулятора сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор и далее в передающую антенну.
Описанное устройство имитатора по структуре и принципу функционирования соответствует системе увеличения радиочастотного отклика [2], устройству генератора электромагнитной цели [3], методу обмана сонара или радиолокатора и ложной цели, применяющей этот метод [4], методу электронного увеличения радиолокационных целен (техники) [5, 6].
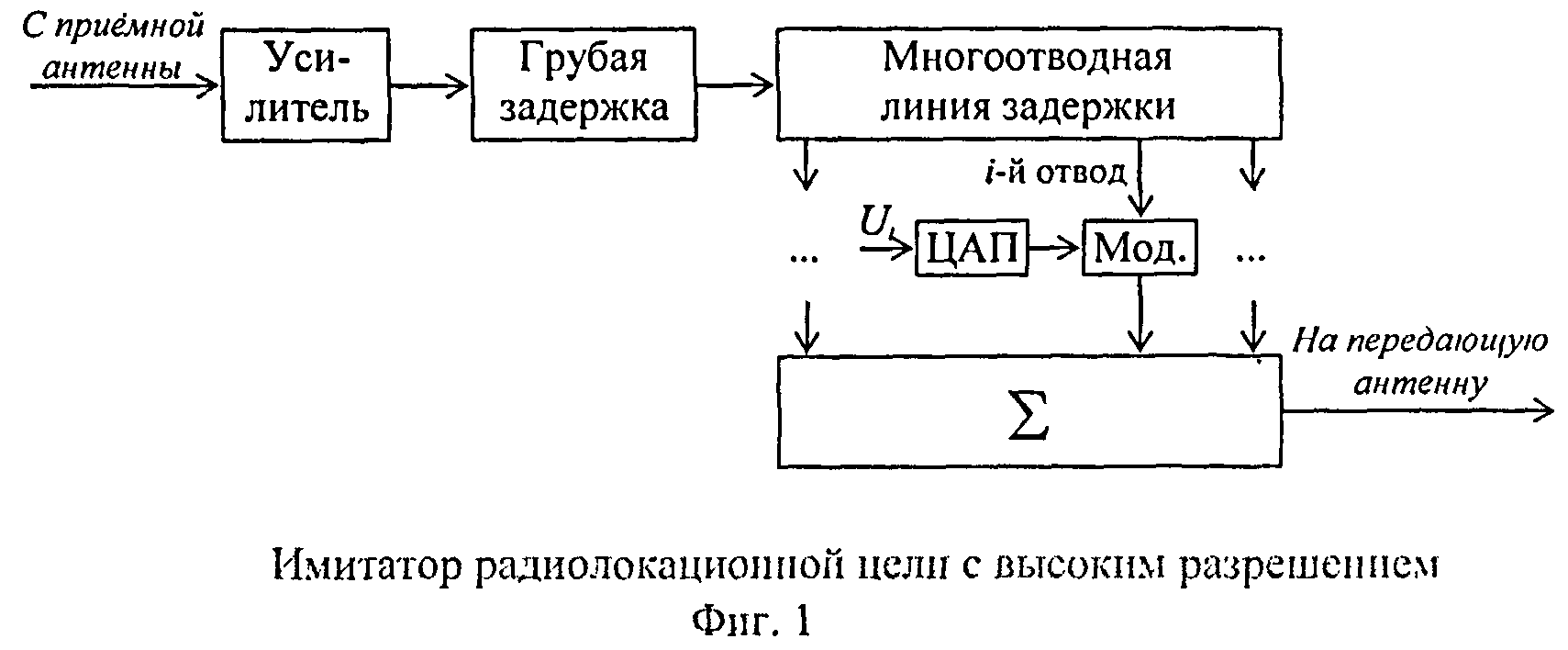
В качестве прототипа можно выбрать типовое для данной задачи и являющееся из просмотренной литературы хронологически первым устройство для имитации радиолокационных целей с высоким разрешением [6] - фиг.1. Наличие ЦАП для управления модуляторами и устройства грубой задержки в виде отдельных блоков является особенностью конкретного аппаратного решения и не принципиально для описания работы и устройства имитатора.
При практическом применении описанных методов и устройств имитации радиолокационных портретов при переменных параметрах модуляции возникает проблема имитации целей с дальностью меньше дальности носителя, защищаемого от работающей РЛС. Аналогичные сложности возникают при использовании имитаторов сигнала для исследования характеристик радиовысотомеров при полунатурном моделировании работы в лабораторных условиях: невозможно обеспечить имитацию сигнала с задержкой менее длительности прохождения сигнала в трактах обработки и формирования имитирующего сигнала.
На сегодняшний день даже в лучших известных схемах цифровой сигнальной памяти минимальная задержка составляет 40 нс, что соответствует дальности 6 м. С учетом использования в реальных имитаторах усилителей, аттенюаторов, соединительных кабелей соответствующая минимальная имитируемая дальность (от момента начала входного сигнала) составляет 10-20 м и более, что ограничивает как возможности скрытия истинного положения носителя, защищаемого от РЛС высокого разрешения, так и возможность имитации малых высот при проверке радиовысотомеров.
В РЛС и РВ с непрерывным излучением применяют зондирующие сигналы с линейной частотной модуляцией (ЛЧМ). При этом для извлечения информации о дальности измеряется основная частота или исследуются гармоники частотного спектра так называемого преобразованного сигнала, получаемого на выходе смесителя из одновременно излучаемого и принимаемого сигналов.
Работу радиовысотомера с симметричным ЛЧМ (СЛЧМ) сигналом при неизменном расстоянии до поверхности поясняет временная диаграмма на фиг.2. Верхний график характеризует изменение частоты излучаемых (сплошная линия fИ) и принимаемых (пунктирная линия fС) колебаний, имеющих среднюю частоту f0, период модуляции TM и девиацию частоты W. Нижний график воспроизводит изменение разностной дальномерной частоты FD. Частота излучаемых колебаний fИ изменяется непрерывно по линейному закону со скоростью YM=dfИ/dt=2W/TM:
 .
.
Частота принимаемых колебаний fС аналогично изменяется непрерывно по линейному закону, но задержана на время распространения сигнала τD=2H/с, где с - скорость света:
 .
.
Измеряя разность частот излучаемых и принимаемых колебаний, определяют дальномерную частоту FD, называемую также частотой биений:
Полученное выражение не учитывает провалы кривой FD(t) в зонах обращения при fи≈fс., при учете которых частотомер зафиксирует среднюю частоту биений за период модуляции:
 .
.
При выполнении условия τD<<TM зонами обращения можно пренебречь, средняя частота биений FDcp≈FD. Следовательно, при СЛЧМ значение высоты Н пропорционально частоте биений:

Известно, что и доплеровский сдвиг и временная задержка отраженного ЛЧМ сигнала могут имитироваться соответствующим смещением его несущей частоты [9, 10]. Поэтому для снижения минимальной имитируемой высоты и компенсации собственной задержки в любой аппаратной реализации возможно использование определенного сдвига частоты: радиовысотомер с несимметричной ЛЧМ (НЛЧМ) будет регистрировать эквивалентную малую высоту, если при формировании сигнала выполнить дополнительный частотный сдвиг Δf в сторону «сближающую» на измерительном участке графики fизлуч(t) и fформ(t) - фиг.3. Частота биений: f(t)=fизлуч(t)-fформ(t). При несимметричной нарастающей пиле ЛЧМ в основной части измерительного участка (исключая зоны обращения) f(t)=const=Fb. Видно, что положительный сдвиг частоты Δf для сигнала, задержанного на τmin, приведет к уменьшению значения средней частоты биений Fb и, соответственно, к уменьшению измеряемой высоты.
Применение этого метода при СЛЧМ в основной части измерительного участка (исключая зоны обращения) даст 2 значения частоты биений: положительный сдвиг частоты Δf для сигнала, задержанного на τmin, приведет к уменьшению значения Fb в одном полупериоде и к такому же увеличению Fb во втором полупериоде. Если бы вычислитель такого радиолокатора работал по переднему фронту спектра, то задача уменьшения измеряемой дальности была бы решена. Но, например, в применяемых СЛЧМ РВ используется оценка дальности по частоте биений, соответствующей центру тяжести спектра, усредненного на всем периоде модуляции, поэтому такое раздвоение основной гармоники спектра не повлияет на измеряемое значение высоты в РВ.
Целью предлагаемого изобретения является имитация целей с дальностью меньше дальности носителя без ухудшения качества имитируемых радиолокационных портретов целей при зондировании сигналами с различными видами линейной частотной модуляции.
На фиг.4 приведен принцип формирования гармоник огибающей спектра сигнала биений при СЛЧМ: для уменьшения имитируемой высоты каждая гармоника с τ<τmin заменяется на две гармоники с τ=τформ, причем для первой (fИ-fС1) делался положительный, а для второй (fИ-fC2) отрицательный сдвиг по частоте Δf.
В результате такого варианта получается раздвоение спектров в каждый момент времени (и в первом и во втором полупериодах): гармоники с τ<τmin сформируют две пары огибающих спектра, разнесенные по оси частот на 2 Δf. Варьируя только значение τформ≥τmin, можно выбрать постоянное значение Δf, большее половины ширины полосы фильтра сигнала биений; вычислить задержку τформ, соответствующую Hформ.
Необязательная, но улучшающая восприятие гармоника (fИ-fС0) соответствует сигналу с задержкой τmin без сдвига по частоте, ее положение в обоих полупериодах периода модуляции постоянно, и на фиг.4 она формирует хвостовую часть низкочастотной огибающей спектра сигнала биений.
В итоге при обработке в приемнике РВ и РЛС высокочастотные гармоники будут подавлены или отброшены, т.к. по имитируемой дальности находятся далеко от цели, а измеренное значение дальности цели будет соответствовать центру тяжести низкочастотной огибающей спектра с меньшим значением имитируемой высоты.
Предлагаемым техническим решением выполняется имитация цели с дальностью больше или меньше дальности носителя при зондировании сигналами с различными видами линейной частотной модуляции без ухудшения качества имитируемых портретов целей. При этом для упрощения конструкции можно смещать по дальности весь радиолокационный портрет цели без анализа возможности имитации некоторой его части (например, гармоники fС0 на фиг.4) с применением только линий задержки.
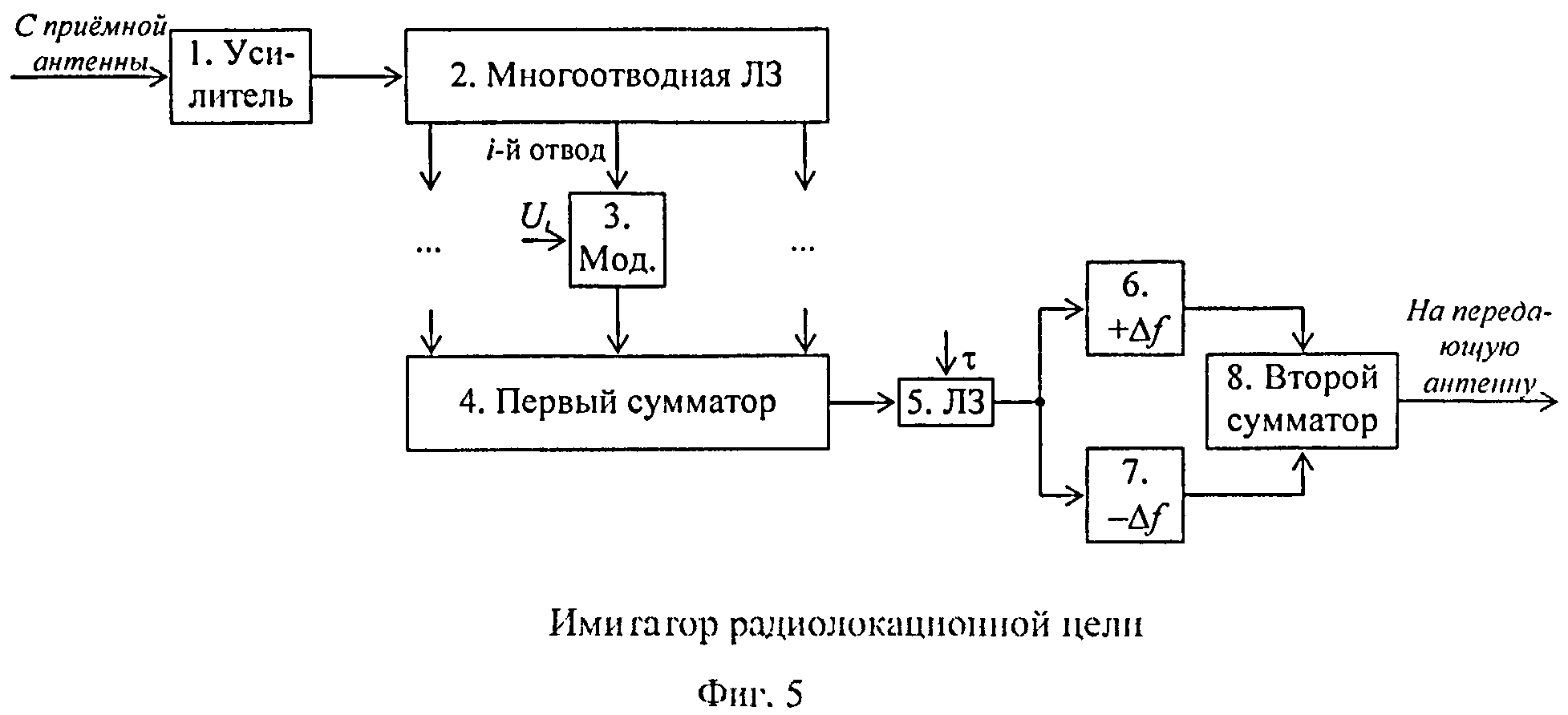
Для достижения этого технического результата прототип (патент GB 2134740 [6]), содержащий последовательно соединенные усилитель сигнала приемной антенны и многоотводную линию задержки, выходы которой соединены с первыми входами набора модуляторов, на вторые входы которых подаются коэффициенты амплитудно-фазовой модуляции, а выходы которых соединены со входами сумматора, снабжен переменной линией задержки, двумя устройствами сдвига частоты и вторым сумматором, причем на первый вход переменной линии задержки поступает сигнал с выхода сумматора, на второй вход поступает величина задержки «τ», определяющая смещение имитируемой цели по дальности в меньшую (при τ<Δf/Vf, где Vf - модуль скорости линейного изменения частоты радиолокатора, Δf - параметр, выбираемый примерно равным или больше ширины избирательного фильтра захвата/сопровождения цели в радиолокаторе) или большую сторону (при τ>Δf/Vf), а выход переменной линии задержки соединен со входами двух устройств сдвига частоты, причем сдвиги частоты выполняются на одну и ту же величину «Δf», но с противоположными знаками: «+Δf» и «-Δf», выходные сигналы устройств сдвига частоты поступают на входы второго сумматора, выходной сигнал с которого выдается на передающую антенну.
Устройство содержит (фиг.5):
1 - усилитель;
2 - многоотводная линия задержки;
3 - набор модуляторов;
4 - первый сумматор;
5 - переменная линия задержки;
6 - устройство сдвига частоты на «+Δf»;
7 - устройство сдвига частоты на «-Δf»;
8 - второй сумматор.
Устройство на фиг.5 работает следующим образом: зондирующий импульс от радиолокатора, для которого создается радиолокационный портрет, поступает с приемной антенны через усилитель, многоотводную линию задержки, набор модуляторов, первый сумматор, линию задержки, устройство сдвига частоты и второй сумматор на выход имитатора. Многоотводная линия задержки обеспечивает имитацию блестящих точек цели (целей) с индивидуальными задержками. Индивидуальные амплитудные и фазовые модуляции выполняются с помощью соответствующих коэффициентов, формируемых внешним устройством. В зависимости от значения задержки τ в линии задержки выполняется имитация смещения имитируемой цели по дальности относительно дальности носителя:
в меньшую сторону при τ<τ0=Δf/Vf,
в большую сторону при τ>τ0,
где τ0 - задержка в имитаторе, при которой смещение цели отсутствует;
Vf - модуль скорости линейного изменения частоты РЛС,
Δf - параметр, выбираемый примерно равным или больше ширины избирательного фильтра захвата и сопровождения цели в РЛС.
При τ=0 и постоянном значении модуля скорости линейного изменения частоты РЛС положение имитируемой цели по дальности уменьшится на величину

где с - скорость света.
Особенностью описанного решения для построения имитатора является то, что независимо от направления и сочетания знаков скорости линейного изменения частоты РЛС имитируются две одинаковые цели, причем первая - основная - цель может имитироваться на дальности меньше дальности носителя РЛС, а вторая цель будет отнесена по дальности на 2·ΔRmax и при соответствующем выборе значения Δf не будет мешать корректному слежению РЛС за основной целью. Значение параметра Δf выбирается примерно равным или больше ширины избирательного фильтра захвата и сопровождения цели в РЛС, однако с соблюдением условия корректной обработки принятого сигнала в РЛС: τ0<<TM и, следовательно, Δf<<TM·Vf, где TM - период модуляции.
При наземных испытаниях СЛЧМ РВ и РЛС описанное решение позволяет скомпенсировать собственную аппаратную задержку в цепях имитатора и обеспечить имитацию дальностей от 0 м при сохранении всех аппаратных и функциональных возможностей имитационного комплекса.
В современных РВ и РЛС с ЛЧМ для повышения точности работы может варьироваться не только знак, но и само значение скорости линейного изменения частоты. В этом случае зависимость ΔRmax от Vf не является прямопропорциональной, но может быть найдена при известном принципе работы радиолокатора в случае зависимости параметров линейной частотной модуляции от величины измеряемой дальности цели.
Предположим, что радиолокатор выполняет слежение за дальностью цели таким образом, чтобы частота сигнала биений была постоянной: FD=const. Тогда из (1), учитывая, что при СЛЧМ Vf=2W/TM, получим:

В ряде случаев точные значения FD, H, Vf неизвестны, поэтому желательно обеспечить работу имитатора радиолокационной цели с независимой оценкой текущих значений параметров линейной частотной модуляции. Непосредственное измерение текущих значений W и TM затруднительно, так как требует применения сигнальных процессоров, при испытаниях в лабораторных условиях можно получать параметры от радиолокатора по дополнительному интерфейсу [11].
Но, в общем случае, возможна оценка значения Vf непосредственно по входному сигналу с использованием образцовой линии задержки τref и смесителя задержанного и незадержанного сигналов [12]. Для НЛЧМ и СЛЧМ видов модуляции частота сигнала fref, формируемого на выходе смесителя, будет пропорциональна искомому значению Vf:
В качестве сигнала с образцовой линии задержки τref может быть взят сигнал с любого удобного для последующей обработки выхода многоотводной линии задержки 2.
Для реализации независимого определения параметров линейной частотной модуляции РЛС устройство на фиг.5 дополнительно снабжено последовательно соединенными смесителем и устройством формирования задержки, причем на входы смесителя поступают сигналы с выхода усилителя и с одного из выходов многоотводной линии задержки, на второй вход устройства формирования задержки поступает величина требуемого смещения сигнала по задержке «Δτ», а выход соединен с управляющим входом линии задержки.
Устройство содержит (фиг.6):
1 - усилитель;
2 - многоотводная линия задержки;
3 - набор модуляторов;
4 - первый сумматор;
5 - переменная линия задержки;
6 - устройство сдвига частоты на «+Δf»;
7 - устройство сдвига частоты на «-Δf»;
8 - второй сумматор;
9 - смеситель;
10 - устройство формирования задержки.
Устройство на фиг.6 работает аналогичным образом как и ранее описанное на фиг.5, но на входы смесителя 9 поступают сигналы с выхода усилителя 1 и с одного из выходов многоотводной линии задержки 2, таким образом на выходе смесителя формируется сигнал fref, с помощью которого в устройстве формирования задержки 10 по выражению (5) находится значение скорости изменения частоты Vf и далее по поступающей из внешнего устройства величине требуемого смещения сигнала по задержке «Δτ» и выражению (6) находится значение задержки τ для переменной линии задержки 5:

где τint - собственная (внутренняя) задержка в цепях имитатора;
Δτ - требуемое смещение сигнала по задержке: при уменьшении имитируемой дальности или компенсации собственной задержки - значение со знаком минус.
При практической реализации линии задержки модуляторы и сумматоры могут быть аналоговыми или цифровыми. Для повышения качества имитации формирование сигнала можно выполнять в цифровом виде на цифровых линиях задержки и модуляторах, например, используя СБИС 1879BM3(DSM) [8], можно реализовать переменную линию задержки в виде кольцевого буфера во внутреннем ОЗУ с программно-управляемым сдвигом частоты преобразуемого сигнала. Дополнительные усилители, аттенюаторы для согласования уровней и возможные смесители, например, с сигналом гетеродина для согласования рабочей полосы частот блоков обработки сигналов на фиг.5, 6 не показаны, но могут быть использованы и рассчитаны в соответствии с [7].
Для исключения попадания выходного сигнала с передающей антенны на вход приемной антенны можно использовать циркулятор, стробирование работы и/или пространственное разнесение антенн [1, стр.184]. При стационарных испытаниях возможно непосредственное подключение кабелей к исследуемой радиолокационной системе без использования антенн.
Литература
1. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием / Под. Ред. Ю.М.Перунова. Изд. 2-е, испр. и дополн. - М.: «Радиотехника», 2008. - 416 с.
2. Патент US 2008/018525. Radio frequency signature augmentation system. Дата публикации: 23.09.1986 (фиг.22)
3. Патент US 5892479. Electromagnetic target generator. Дата публикации: 06.04.1999.
4. Патент FR 2596164. Method for deceiving a sonar or radar detector, and a decoy for implementing the method. Дата публикации: 25.09.1987.
5. Патент US 4613863. Electronic augmentation of radar targets. Дата публикации: 23.09.1986 (фиг.2)
6. Патент GB 2134740. Electronic augmentation of radar techniques. Дата публикации: 15.08.1984.
7. Патент RU 2412449. Имитатор радиолокационной цели. Дата публикации: 10.07.2010 г.
8. Микросхема интегральная 1879BM3(DSM), Техническое описание, Версия 1.1, ЮФКВ 431268 001 ТО1 К, Научно-технический центр «Модуль». М. 2002.
9. Виницкий А.С. Очерк основ радиолокации при непрерывном излучении радиоволн. М.: Сов. радио, 1961. - 496 с.
10. Саломасов В.В. Особенности имитации отраженного сигнала для РЛС с ЛЧМ / В.В.Саломасов, А.А.Щербаков // Известия вузов. Радиоэлектроника. М. 1987, т.30. Стр. 84-86.
11. Патент US 7327308. Programmable method and test device for generating target for FMCW radar. Дата публикации: 05.02.2008.
12. Патент US 4661818. Electronically adjustable delay-simulator for distance-measuring apparatus operating on the frequency-modulated continuous wave principle. Дата публикации: 28.04.1987.
Приемопередающее устройство
Антенное устройство радиовысотомерной системы с повышенной точностью измерения поперечной составляющей скорости
Радиовысотомерная система с адаптацией к гладкой водной поверхности
Цифровая активная фазированная антенная решетка
Устройство для имитации ложной радиолокационной цели при зондировании сигналами с линейной частотной модуляцией
Способ измерения высоты, истинной скорости летательного аппарата и наклона вектора скорости летательного аппарата относительно горизонта, устройство бортовой радиолокационной станции, использующее способ
Радиодатчик
Имитатор радиолокационной цели
Способ снижения нижней границы измерения малых высот до нуля и устройство когерентного импульсно-доплеровского радиовысотомера, реализующего способ
Система коррекции ошибок инс летательного аппарата по дорожной карте местности
Комбинированная моноимпульсная антенна кассегрена с возбуждением от фазированной антенной решетки
Система встроенного контроля и калибровки моноимпульсной рлс
Способ сопровождения цели и устройство моноимпульсной рлс, реализующей способ
Способ измерения угловых координат целей в моноимпульсной обзорной рлс и моноимпульсная обзорная рлс
Способ построения бортовых конических антенных решеток
Способ определения координат и параметров движения источников радиоизлучений на основе анализа их взаимного расположения

