Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ОРТОПЕДИЧЕСКИМ СУСТАВОМ
Вид РИД
Изобретение
Изобретение относится к способу управления ортопедическим суставом нижней конечности в направлении сгибания и/или вытяжения, содержащим регулируемый исполнительный механизм для согласования ортопедического устройства с ситуациями при ходьбе, которые отклоняются от ходьбы по плоскости. Ортопедическое устройство имеет на верхней стороне соединительные средства с конечностью и расположенный дистально относительно соединительных средств шарнирный ортопедический элемент.
DE 10 2006 021 802 в качестве ранее опубликованного документа относится к управлению пассивным протезом коленного сустава с регулируемым демпфированием в направлении сгибания для приспособления протезного устройства с расположенными на верхней стороне соединительными средствами и соединительным элементом с искусственной стопой, которая закреплена на протезе коленного сустава, для хождения по лестнице. При этом обнаруживается поднимание с небольшим моментом протеза стопы, и затем демпфирование сгибания в фазе поднимания уменьшается ниже уровня, который пригоден для хождения по плоскости.
Исходя из этого уровня техники, в основу изобретения положена задача создания способа для управления ортопедическим суставом, с помощью которого обеспечивается возможность учета особых ситуаций при ходьбе и создания согласованных характеристик ортопедического устройства.
Эта задача решена, согласно изобретению, с помощью способа с признаками главного пункта формулы изобретения. Предпочтительные варианты выполнения и модификации способа приведены в зависимых пунктах формулы изобретения.
Согласно изобретению, в способе управления ортопедическим суставом, под которым понимаются как протезные суставы, так и ортезные суставы нижней конечности, по меньшей мере, с одной степенью свободы, предусмотрено, что с помощью регулируемого исполнительного механизма осуществляют приспособление к различным ситуациям при ходьбе, например, посредством изменения демпфирования в направлении сгибания и/или вытяжения. Ортопедическое устройство, в которое интегрирован ортопедический сустав, может быть при этом ортопедическим ортезом или протезом, например протезом коленного сустава с дистальными соединительными средствами для протеза стопы, а также проксимальными соединительными средствами для конечности. Также предусмотрено, что ортопедическое устройство имеет лишь один протезный голеностопный сустав с закрепленной на нем искусственной стопой и соединительными средствами с культей голени. Наряду с экзопротезами предусмотрены также коленные или голеностопные ортезы, которыми можно управлять с помощью способа. В качестве ортопедического элемента, шарнирно расположенного дистально относительно соединительных средств, в ортопедических коленных суставах рассматриваются шины голени с гнездом для стопы в ортезах и стержень голени с протезной стопой в протезах. В ортопедических устройствах для голеностопного сустава для ортезов предусмотрено гнездо для стопы и крепежные средства на голени, а в протезах предусмотрена протезная стопа с соединительными средствами на голени.
На ортопедическом устройстве расположены датчики, которые измеряют несколько параметров ортопедического устройства или конечностей. Эти измеренные параметры сравнивают с критериями, которые созданы на основании множества параметров и/или изменений параметров. На основании этих критериев, которые введены в вычислительный блок и которые соотносят определенные состояния движения или состояния нагрузки ортопедического устройства с определенными ситуациями при ходьбе, выбирается определенный критерий, который на основании определяемых параметров и/или изменений параметров рассматривается как наиболее подходящий. В принципе существует возможность, что на основании определяемых параметров или изменений параметров в качестве наиболее подходящих рассматриваются также несколько критериев. В этом случае либо выполняют выбор на основании дополнительных параметров, либо выполняют наложение друг на друга нескольких особых функций. При этом датчики определяют параметры во время ходьбы, предпочтительно во время ходьбы по плоскости, так что пользователь ортопедического устройства имеет возможность инициирования особых функций без необходимости выполнения движений, которые не существуют в нормальной схеме. Посредством измерения небольших отклонений отдельных параметров и оценки в корреляции с другими параметрами и отклонениями, которые объединяются в критерии, обеспечивается возможность оценки предстоящих последовательностей движения, так что можно осуществлять инициирование особой функции при ходьбе. В то время как из уровня техники известно активирование особых функций за счет непривычных последовательностей движения при остановке, например за счет многократной быстрой нагрузки передней части стопы или выполнения волнового движения за счет не типичной, попеременной нагрузки пятки и передней части стопы, с помощью способа, согласно изобретению, можно осуществлять переключение при ходьбе, так что имеет место «интуитивное» управление, которое не требует сознательных действия включения. Это приводит к повышению комфорта при ношении и повышению безопасности, в частности, для носителей протеза, поскольку минимизируется или исключается неправильное управление.
Для управления особыми функциями, которые отклоняются от ходьбы по плоскости, предусмотрено, что сопротивления движению, величины движения, приводные силы и/или ход их изменения согласовываются в зависимости от выбранных критериев. Управление особой функцией или ее инициирование осуществляется на основании выбранного критерия или выбранных критериев и содержит, например, согласование демпфирования сгибания и/или демпфирования вытяжения с уровнем, который отклоняется от уровня, который подходит для ходьбы по плоскости, деблокирование стопора, регулирование привода и/или регулирование упора. За счет изменения установки пассивных компонентов, таких как гидравлика, тормоза или упоры, в ортопедическое устройство не подается дополнительная энергия движения, так что в этой связи речь идет о пассивных исполнительных механизмах. Регулирование пассивных исполнительных механизмов, например уменьшение проточного поперечного сечения за счет перемещения заслонки, требует также энергии, которая, однако, не приводит к увеличению энергии движения протеза или ортеза. Под активными исполнительными механизмами понимаются насосы, электрические приводы или т.п., которые могут активно поддерживать процесс движения. В качестве исполнительных механизмом можно использовать переключатели, насосы, электродвигатели, накопители энергии или другие приводы. В качестве накопителей энергии предусмотрены, например, пружины, накопители давления или т.п., которые могут отдавать накопленную в них энергию управляемым образом в устройство.
Таким образом, обеспечивается возможность выполнения особых функций, например попеременный подъем по лестнице с помощью протезного коленного сустава и облегчение подъема по лестнице для носителя протеза, без опасности того, что соответствующая нога вдруг подламывается или застревает под ступенькой лестницы. Кроме того, обеспечивается возможность вызова особой функции из различных исходных положений, например, когда подъем по лестнице должен осуществляться сначала из состояния ходьбы, из состояния остановки, с помощью снабженной протезом стороны или с помощью противоположной стороны, когда необходимо преодолевать первую ступеньку или достигнута последняя ступенька. Обеспечивается также возможность вызова особой функции из исходного положения с помощью нескольких различных критериев, когда несколько критериев указывают на определенный ожидаемый шаблон ходьбы или ожидаемую ситуацию ходьбы. За счет этого обеспечивается возможность в целом автоматического управления суставом, без необходимости сознательного выполнения пользователем ортопедического устройства действия, которое отклоняется от естественной последовательности ходьбы.
Таким образом, обеспечивается возможность получения носителем протеза/ортеза ортопедического устройства, которое приспосабливается к соответствующей ситуации без необходимости долгого привыкания к расширенной функции. В изобретении используется то обстоятельство, что соответствующие исходные положения и ситуации при ходьбе имеют специфическую, характерную нагрузку или последовательность нагрузок или последовательность параметров, которые пригодны для образования критериев, с целью вызова особых функций и выполнения соответствующего изменения степеней свободы, в частности демпфирования, такого как демпфирование сгибания и/или демпфирования вытяжения.
В частности, управление пассивным суставом возможно посредством регулирования демпфирования, также предусмотрено, что убирается или устанавливается стопор, например упорный стопор, или же регулируется упор, так что может быть реализован изменяемый угол сгибания. Кроме того, возможно также регулирование привода, так что определенные элементы ортопедического устройства регулируются активно, например поддерживается движение вытяжения или движение сгибания в стопе или в коленном суставе.
В качестве параметра критериев, которые привлекаются для инициирования одной или нескольких особых функций, можно использовать осевую силу или ход изменения осевой силы, которые устанавливаются в компонентах ортопедического устройства, например в шине голени ортеза или в стержне голени коленного протеза. При этом в качестве хода изменения силы привлекается увеличение или уменьшение осевой силы, изменение хода осевой силы и скорость уменьшения осевой силы. Для определения этих параметров используются датчики силы, которые определяют осевую силу внутри ортопедического устройства. С помощью повторного измерения, предпочтительно с коротким циклом, можно определять ход изменения осевой силы.
Кроме того, предусмотрено, что в качестве подлежащих учету параметров при выборе особых функций привлекается угол сустава или ход изменения угла сустава. Изменение угла сустава определяется в виде скорости поворота или ускорения вокруг оси сустава во время ходьбы. С помощью угла сустава можно определять, например, относительное положение компонентов ортопедического устройства, за счет чего обеспечивается возможность обнаружения определенных фаз ходьбы и извлечения из них заключений об ожидаемой ситуации ходьбы, соответственно, определения или оценки ожидаемой нагрузки на ортопедическое устройство.
Кроме того, можно привлекать в качестве параметра действующий в суставе момент, изменение момента в суставе или ход изменения момента в суставе, поскольку каждой ситуации при ходьбе можно присваивать в определенный момент времени определенное значение момента. С помощью момента сустава в самой фазе или в ходе изменения момента в суставе можно определять, в какой ситуации при ходьбе находится пользователь ортопедического устройства и какие дополнительные регулирования демпфирования необходимо выполнять, с целью возможно оптимальной поддержки следующей ситуации при ходьбе.
Кроме того, предусмотрено, что измеряют вертикальное движение, по меньшей мере, одного компонента ортопедического устройства и привлекают в качестве параметра для определения инициирование особой функции, когда этот параметр вместе с другими параметрами лежит внутри определенного диапазона значений и тем самым отвечает заданным критериям. Наряду с только вертикальным движением, которое обнаруживается также с помощью соответствующих датчиков, можно привлекать также ход вертикального движения в качестве параметра, т.е. скорость вертикального движения или вертикальное ускорение, с целью определения, в каком исходном положении находится пациент и какую ситуацию ходьбы следует ожидать.
Неожиданным образом было установлено, что можно привлекать также горизонтальное движение или ход горизонтального движения в качестве параметра. При подъеме по лестнице с помощью ортопедического устройства проявилось, что во время ходьбы направляемая вниз, т.е. противоположно направлению ходьбы голень поставляет надежные сигналы. При этом колено находится в направлении ходьбы явно перед суставом лодыжки.
Кроме того, для управления ортопедическим устройством также полезно, когда определяют угол наклона части ортопедического устройства в пространстве, т.е. какой наклон имеет компонент в пространстве. Это можно измерять либо с помощью датчика абсолютного угла, который имеет ориентацию в пространстве в качестве опорной величины, например, действие силы тяжести, либо с помощью вычислительного определения из различных других данных датчиков. Наряду с мгновенным углом наклона, можно привлекать также изменение угла наклона и ход изменения угла наклона части ортопедического устройства, с целью принятия решения, когда и какие инициировать особые функции при демпфировании ортопедического устройства. Угол наклона можно определять посредством пересчета ускорения и угловой скорости, которые воспринимаются с помощью датчиков ускорения и гироскопа.
Предпочтительно, в одном критерии объединяют несколько параметров или ходов изменения параметров, т.е. два или более параметров, с целью возможно более точного определения исходного состояния на основании особых данных и точного соотнесения и принятия решения, какие особые функции инициировать.
Предусмотрено также, что несколько критериев или выполнение нескольких критериев может приводить к инициированию особой функции. За счет этого можно учитывать то обстоятельство, что особая функция, такая как, например, попеременный подъем по лестнице, может начинаться при различных скоростях ходьбы, положениях или сначала со снабженной протезом ноги или со здоровой ноги. Поэтому возможно, что необходимо инициировать только одну особую функцию, однако должны выполняться различные критерии, чтобы инициировать именно эту особую функцию.
В одной модификации изобретения предусмотрено, что способ управления увеличивает в особой функции демпфирование сгибания и/или вытяжения в фазе постановки и выпрямления бедра нижней конечности на уровень выше демпфирования управления фазой взмаха при ходьбе по плоскости. За счет этого возможно выполнение контролированного вытяжения или выпрямления как сустава бедра, так и коленного сустава и сустава стопы.
Для переступания через препятствия необходимо увеличивать в фазе подъема сначала демпфирование сгибания, а затем демпфирование вытяжения, чтобы обеспечить возможность выполнения возможно большого шага, поскольку необходимо преодолевать препятствие, например дверной порог или лежащий на полу предмет, и стопа или протезная стопа не должна устанавливаться на более высокую ступеньку. Однако после постановки стопы предусмотрено, что в особой функции увеличивается демпфирование сгибания и/или демпфирование вытяжения в фазе установки до максимального значения, что распространяется как на попеременный подъем по лестнице, так и на преодоление препятствия, для того чтобы коленный сустав перед выпрямлением был защищен от подкашивания или от жесткого удара при конечном упоре. Также предусмотрено, что непосредственно перед постановкой стопы или протезной стопы увеличивается демпфирование вытяжения перед разгибанием, так что позиционирование стопы или протеза стопы может осуществляться с помощью контролируемого непосредственно пациентом угла бедра. Повышение демпфирования вытяжения до максимального значения имеет то преимущество, что уменьшается оседание при не достаточном моменте выпрямления бедра. При этом большое демпфирование в фазе постановки и разгибания бедра предпочтительно сохраняется до полного разгибания бедра.
Исходное демпфирование сгибания внутри сустава можно предпочтительно увеличивать в зависимости от изменения коленного угла, поскольку с помощью коленного угла можно получать много информации об исходном состоянии. Как только достигается заданный коленный угол, который, как правило, больше коленного угла, который пригоден для управления фазой взмаха при ходьбе по плоскости, увеличивается демпфирование сгибания. В качестве альтернативного решения или дополнительно, демпфирование сгибания можно увеличивать или уменьшать в зависимости от действующей на стержень голени или компонент голени осевой силы. Если осевая сила уменьшается достаточно быстрым образом до приблизительно 0 при почти прямом колене, то это является указанием для инициирования процесса подъема по лестнице, так что можно осуществлять определенное управление внутри демпфирующих устройств.
В качестве альтернативного решения предусмотрено, что в ортопедическом коленном суставе инициируется особая функция при уменьшении действующей на стержень голени осевой силы и при определенном уровне или при разогнутом или разгибающемся коленном суставе, и при этом уменьшается демпфирование сгибания. В качестве дополнительного параметра можно использовать абсолютное значение осевой силы для задания критерия. Если осевая сила падает ниже заданного уровня, то инициируется особая функция, при этом затем в особой функции уменьшается демпфирование сгибания.
Дополнительно или в качестве альтернативного решения предусмотрено, что в ортопедическом коленном суставе особая функция инициируется при наклоненной назад голени, разогнутом коленном суставе и при моменте в колене ниже заданного уровня, при этом в особой функции уменьшается демпфирование сгибания ниже заданного значения. Наклоненная назад голень имеет место, когда коленный сустав находится явно перед голеностопным суставом.
Также предусмотрено, что при вертикальном ускорении вверх и осевой силе ниже заданного уровня инициируется особая функция, которая вызывает изменение демпфирования сгибания и/или вытяжения, и что в особой функции уменьшается демпфирование сгибания.
В одном варианте выполнения предусмотрено, что при горизонтальном ускорении назад, т.е. противоположно направлению ходьбы, и осевой силе ниже заданного уровня инициируется особая функция, и в особой функции уменьшается демпфирование сгибания.
Регулирование демпфирования сгибания и/или вытяжения происходит предпочтительно во время фазы подъема и/или постановки, например, когда стопа или протезная стопа после подъема снова устанавливается, и затем определяется увеличение осевой силы. При предпочтительно остающемся постоянном угле колена можно также увеличивать демпфирование сгибания и/или вытяжения, поскольку это связано с небольшим механическим сопротивлением и поэтому может выполняться с относительно небольшой затратой энергии. Демпфирование сгибания можно уменьшать в фазе подъема до минимального значения, так что действующее в каждой системе демпфирование не повышается на основании трения.
В качестве альтернативного решения предусмотрено, что демпфирование регулируется во время фазы стояния или взмаха.
Возможно также, что подъем с небольшим моментом дистально расположенного ортопедического элемента определяется с помощью датчика силы или момента, при этом обнаружение можно выполнять механически, так же как изменение различных демпфирований, с целью обеспечения возможно более простой конструкции подлежащего управлению ортопедического устройства. После обнаружения подъема с небольшим моментом дистально расположенного ортопедического элемента можно также уменьшать демпфирование сгибания, а именно до уровня, который лежит ниже уровня, который пригоден, соответственно, оптимизирован для ходьбы по плоскости.
За счет уменьшения сопротивления сгибанию за счет уменьшения демпфирования сгибания, можно достигать угла сустава, который обеспечивает возможность постановки протезной стопы или стопы на следующую более высокую ступеньку. При сгибании бедра и поднимании с небольшим моментом протезной стопы или дистально расположенного ортопедического элемента можно достигать угла колена, который при перемещении вперед бедра или при соответствующем вытяжении за счет силы тяжести достаточен для преодоления кромки лестницы или переступания через препятствие и позиционирования протезной стопы или дистально расположенного ортопедического элемента над ступенькой лестницы, соответственно, постановки за препятствием. При этом предпочтительно выполнять распределение массы так, что центр тяжести расположен как можно более дистально, так что без увеличения общего веса ортопедического устройства достигается желаемое действие сгибания колена при подъеме с небольшим моментом протезной стопы или дистально расположенного ортопедического элемента.
Обнаружение подъема с небольшим моментом можно осуществлять посредством измерения вертикального ускорения дистально расположенного ортопедического элемента и измерения сгибания внутри сустава.
В принципе также предусмотрено, что происходит поддержка сгибания в фазе подъема с помощью предварительно напряженного пружинного механизма, наряду со сгибанием колена может происходить также подошвенное сгибание стопы, так что постановка стопы начинается с носка стопы.
После выполненного уменьшения демпфирования сгибания можно регулировать во времени свободное вытяжение, так что действуют лишь присущие системе сопротивления в направлении вытяжения. Управление во времени можно осуществлять механически или электрически. Параметры предпочтительно определяются во время ходьбы, с целью изменения с помощью исполнительных механизмов без прерывания хода движения.
Наряду с управлением в направлении вытяжения или сгибания, также предусмотрено, что управление осуществляется в другой степени свободы, например в медиально-латеральном направлении или в смешанной форме. Такое управление целесообразно, например, в тазобедренном суставе или голеностопном суставе. С помощью управления можно оказывать влияние также на другие вращательные или поступательные степени свободы.
Ниже приводится более подробное пояснение примеров выполнения изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1-6 - ход попеременного подъема по лестнице с пассивным протезом коленного сустава;
фиг.7 - схема выполнения способа;
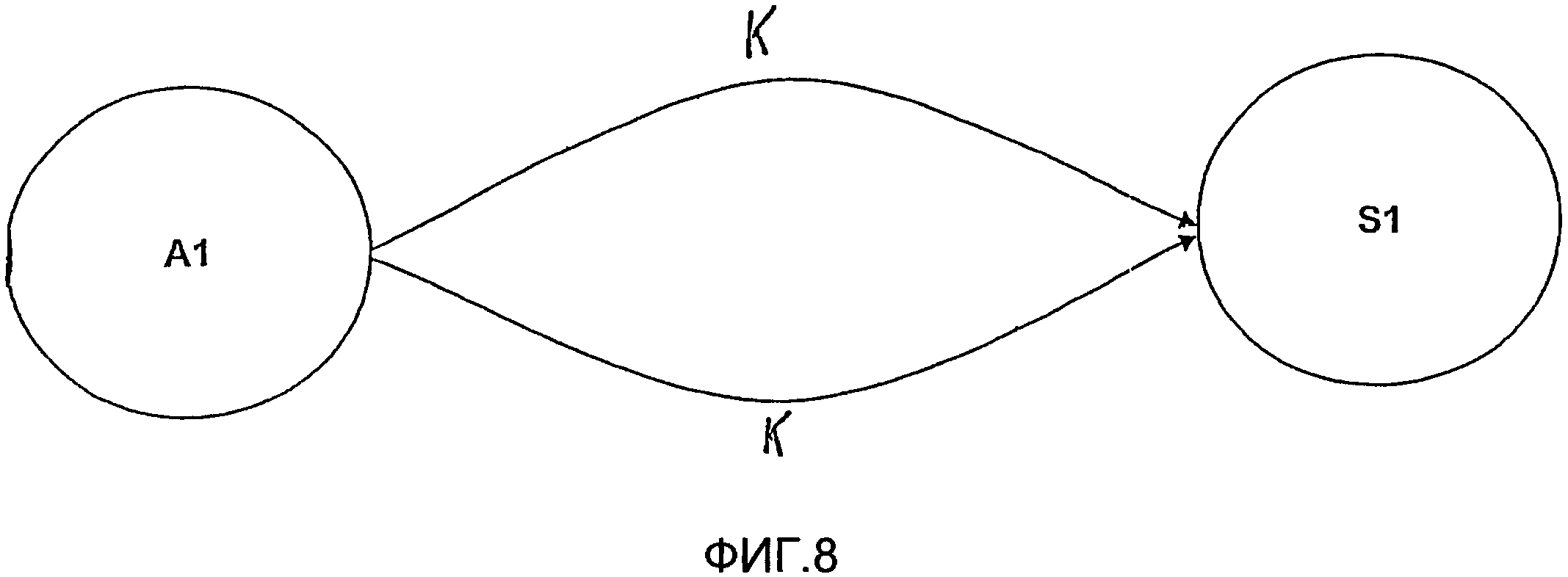
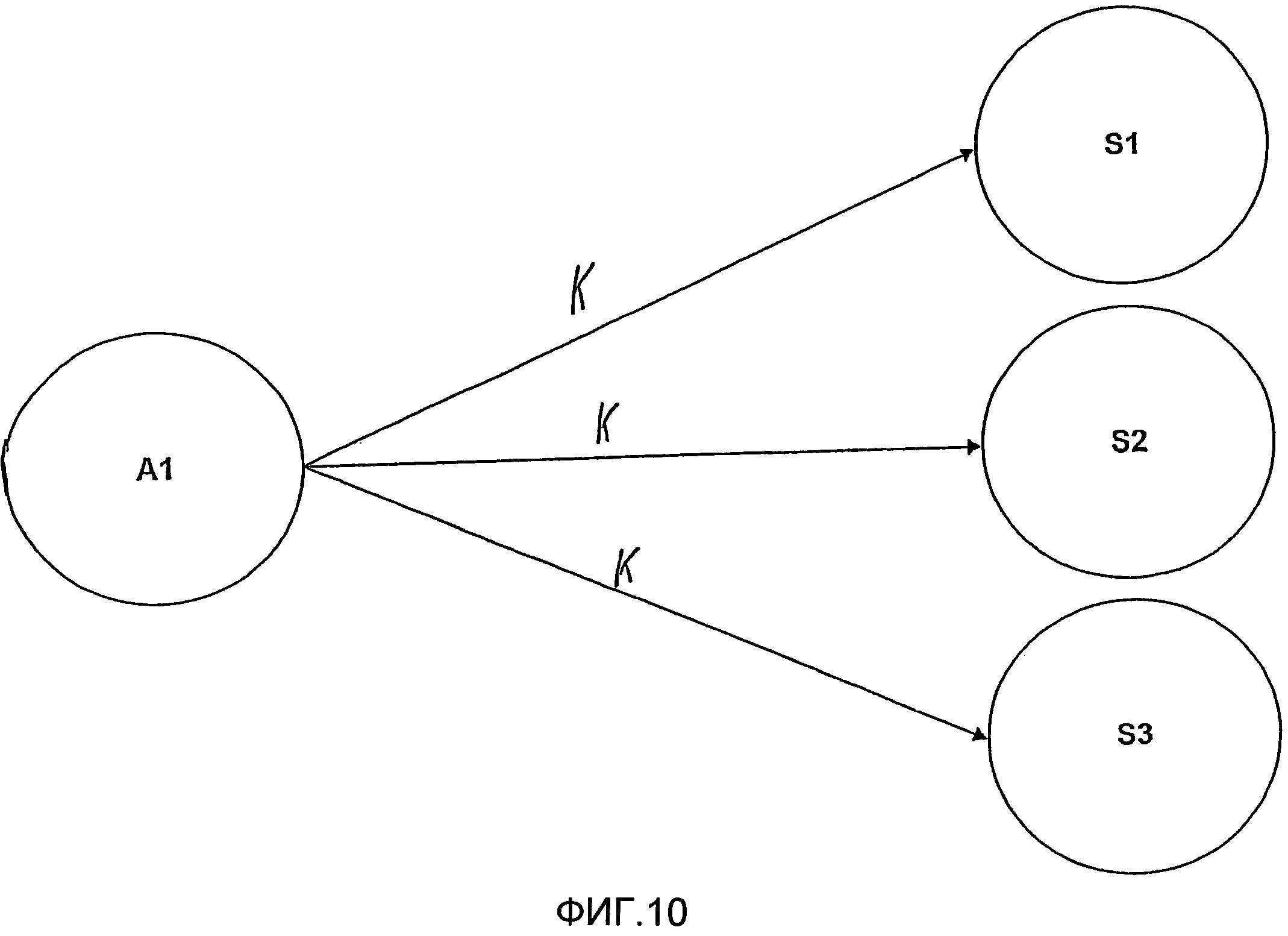
фиг.8-10 - варианты выполнения способа.
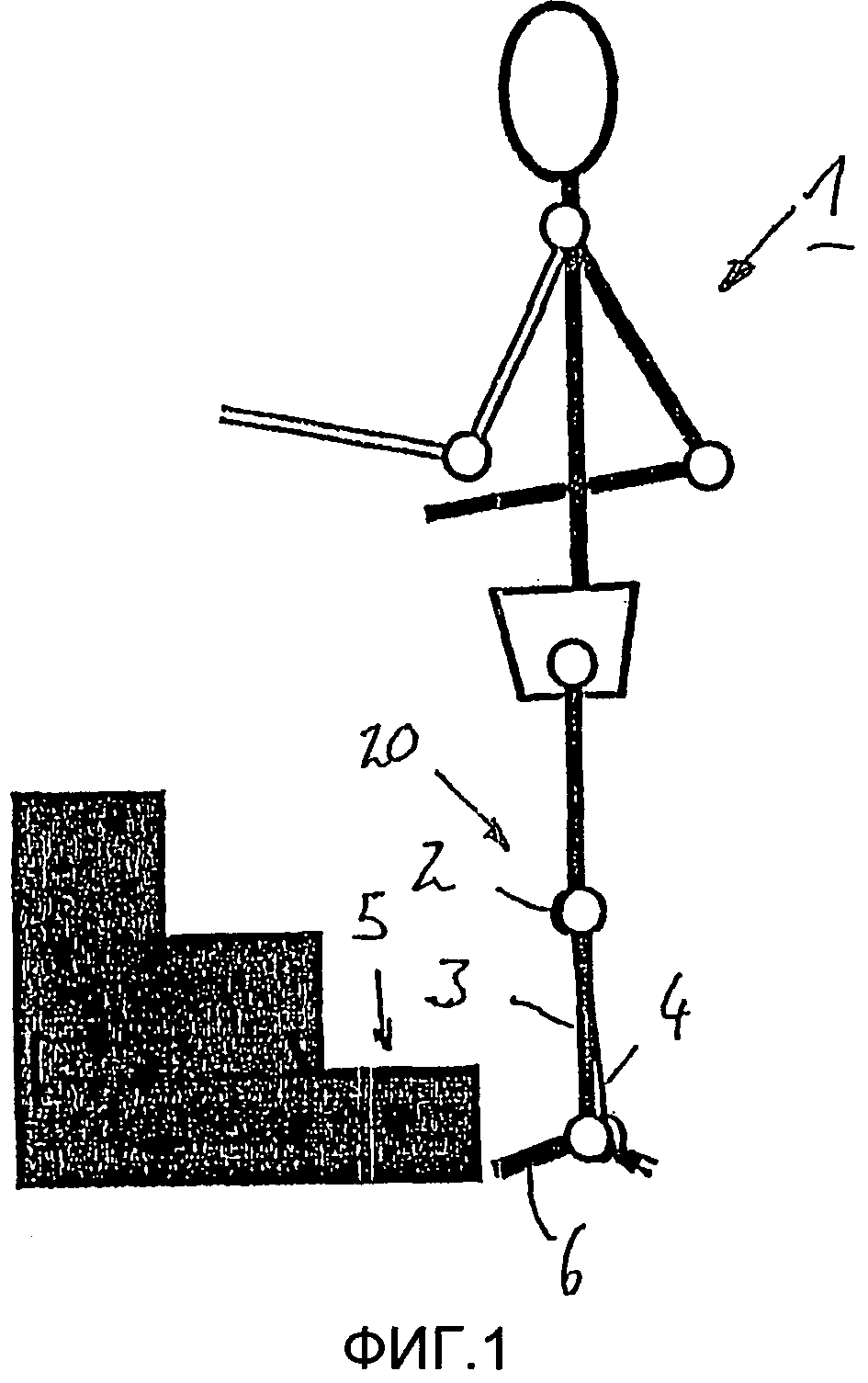
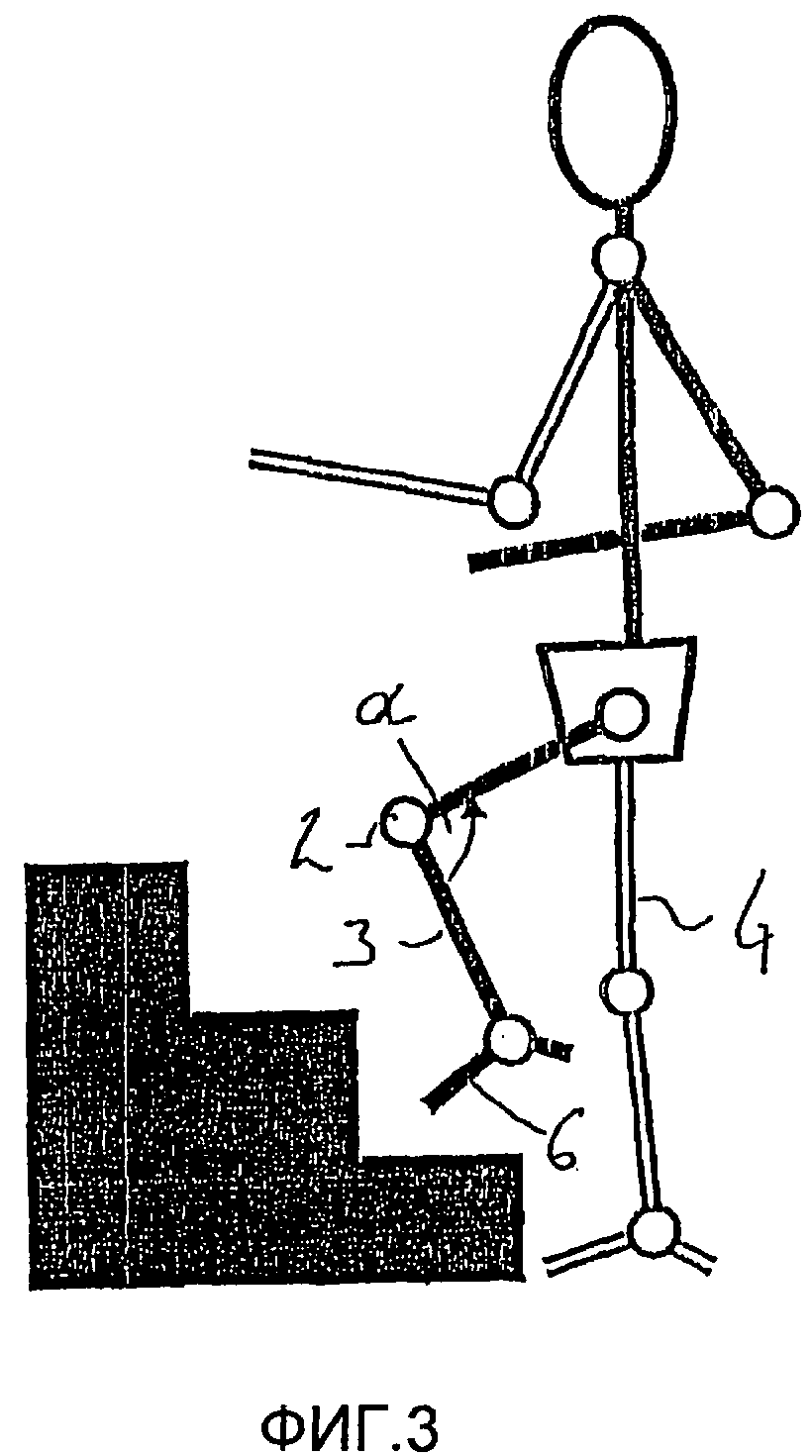
На фиг.1 показан носитель 1 протеза с протезом 2 коленного сустава, который закреплен с помощью расположенных на верхней стороне соединительных средств на культе бедра. Протезная нога 20 стоит со здоровой контрлатеральной ногой 4 перед ступенькой лестницы.
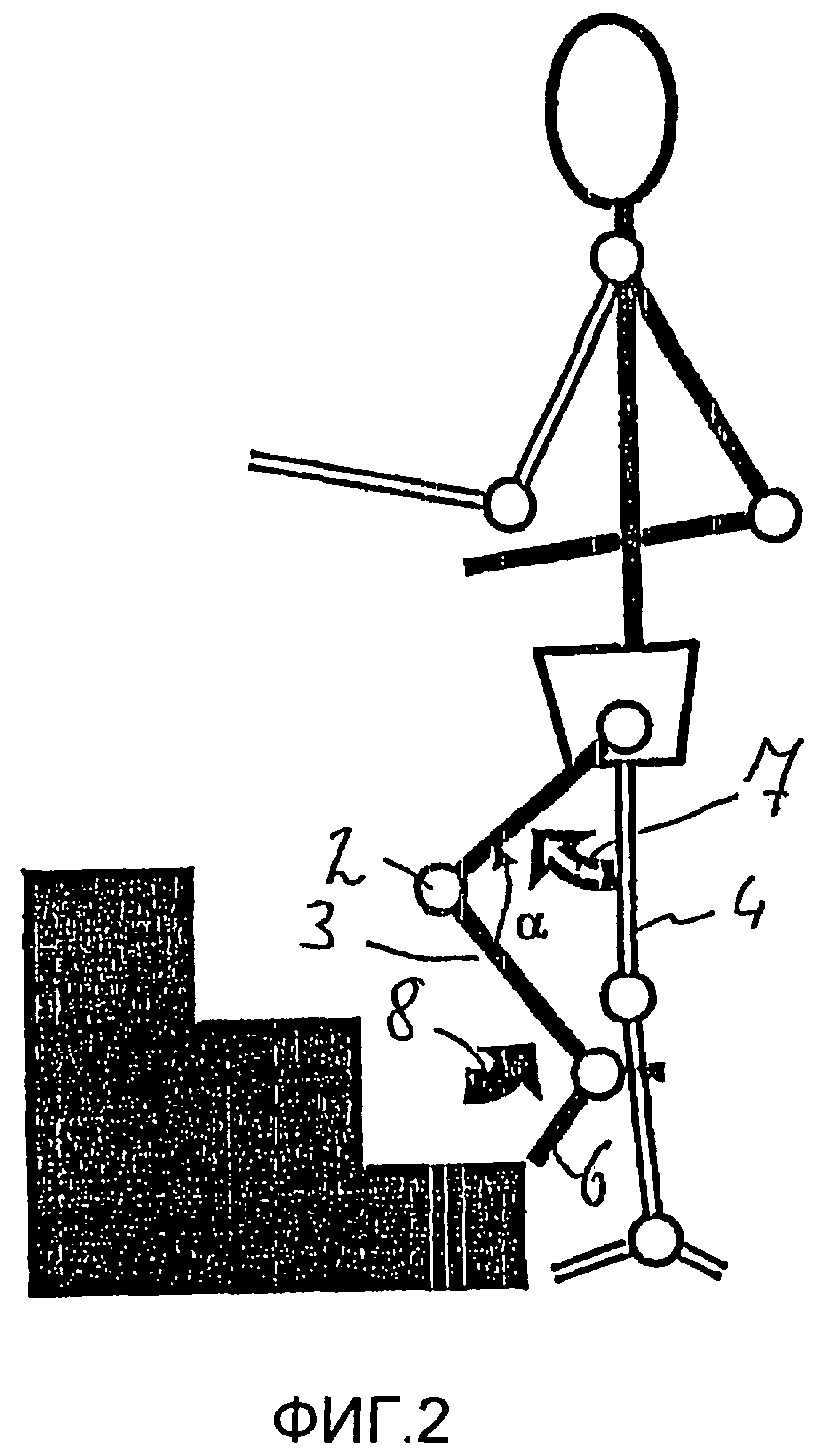
Для достижения следующей более высокой ступеньки необходимо провести протезную стопу 6 вокруг кромки лестницы. Активное сгибание бедра, которое обозначено стрелкой 7, поддерживает пассивное сгибание колена, которое обозначено стрелкой 8, которое на основании инерции как протезной стопы 6, так и соединительного элемента 3 действует от протезного коленного сустава 2 к протезной стопе 6. Для этого необходимо минимальное демпфирование сгибания, для того чтобы после сгибания бедра протезная стопа 6 не взлетала вверх и не ударялась в подступенок или ниже ступеньки 5 лестницы. Целью в фазе подъема является, как показано на фиг.2, проведение протезной стопы 6 возможно более вертикально вверх, при необходимости с инициированием за счет легкого движения назад. При этом обнаружение подъема осуществляется с помощью угла α наклона между соединительным элементом 3 и бедром или с помощью уменьшения осевой силы в соединительном элементе 3 без сгибания протезной стопы 6. Возможно также обнаруживать режим движения по лестнице и за счет этого уменьшать демпфирование сгибания до значения ниже нормального управления фазой взмаха, предпочтительно до минимального значения, за счет горизонтального движения протезной стопы 6 назад в соединении с движением бедра.
После преодоления кромки лестницы и завершения фазы подъема, как показано на фиг.2, требуется надежное позиционирование протезной стопы 6 на ступеньке лестницы. Для этого необходимо протезную стопу 6 переместить вперед, что может осуществляться за счет вытяжения на основании силы тяжести. Для этого может быть уменьшено демпфирование вытяжения, когда это не произошло уже в фазе подъема. Достаточно демпфированный перед разгибанием относительно сгибания и вытяжения протезный коленный сустав 2 обеспечивает возможность позиционирования протезной стопы 6 носителем 1 протеза за счет изменения угла бедра. В фазе опускания и разгибания бедра сгибание и вытяжение предпочтительно сильно демпфированы, для того чтобы наряду с контролированием постановки стопы предотвращать непроизвольное падение назад при не достаточном моменте разгибания бедра. Вытяжение остается демпфированным для обеспечения возможности контролирования скорости при разгибании бедра и колена. Это показано на фиг.3.
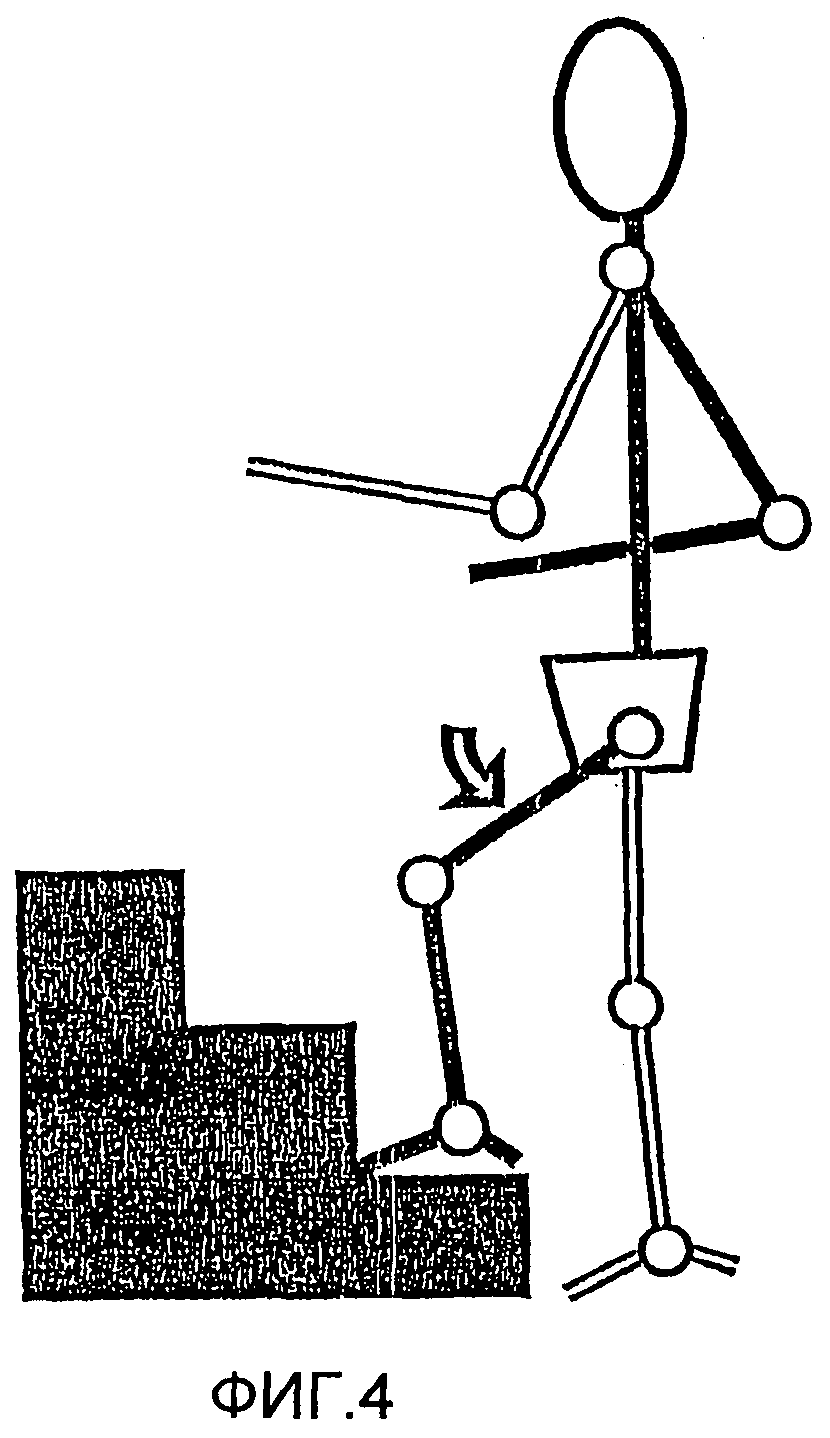
На фиг.4 фаза постановки стопы завершена. Носитель 1 протеза может с помощью момента разгибания бедра инициировать разгибание колена. Разгибание колена можно поддерживать за счет вытяжения здоровой ноги.
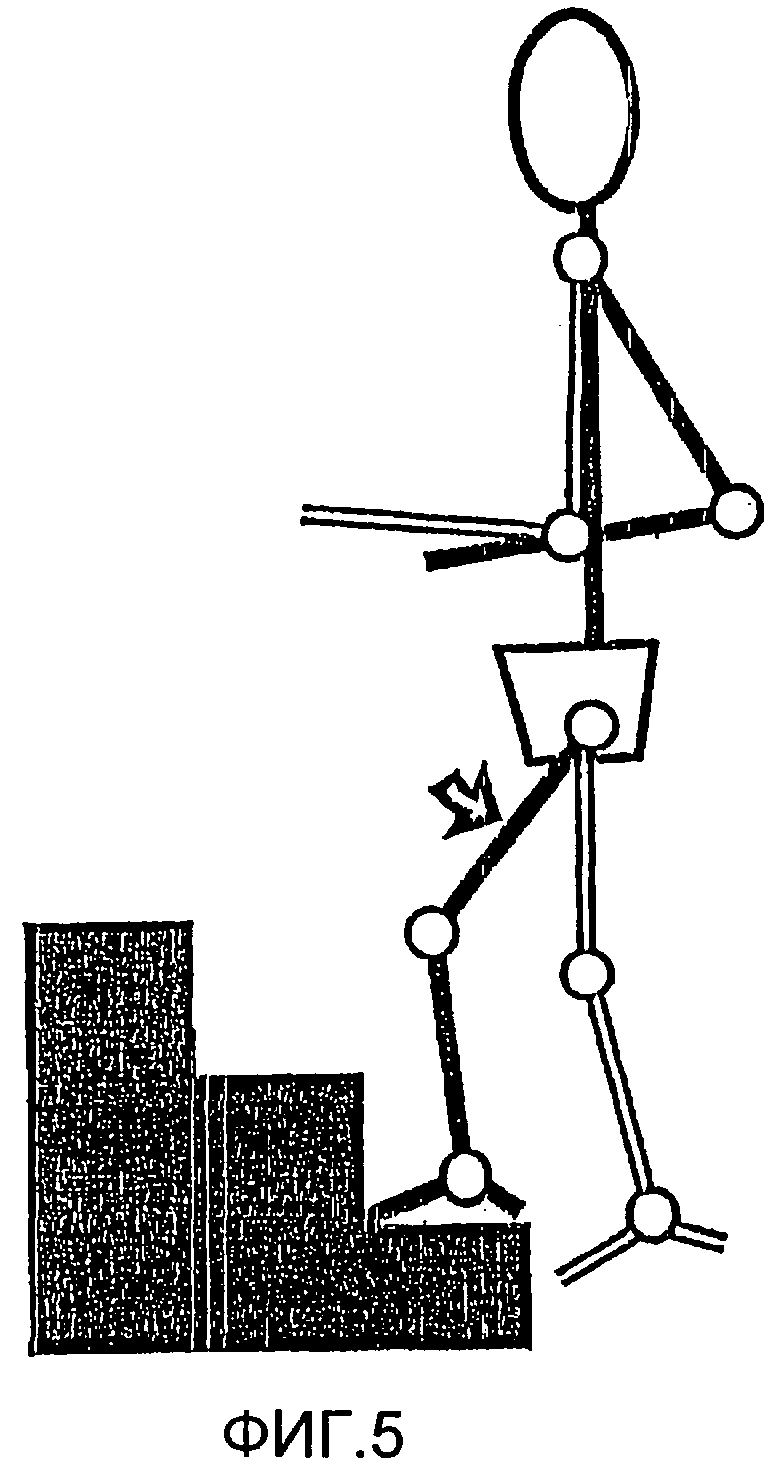
На фиг.5 показано увеличивающееся разгибание колена за счет создания момента бедра. Увеличивающееся разгибание колена укорачивает действующий рычаг и облегчает разгибание колена за счет разгибания бедра.
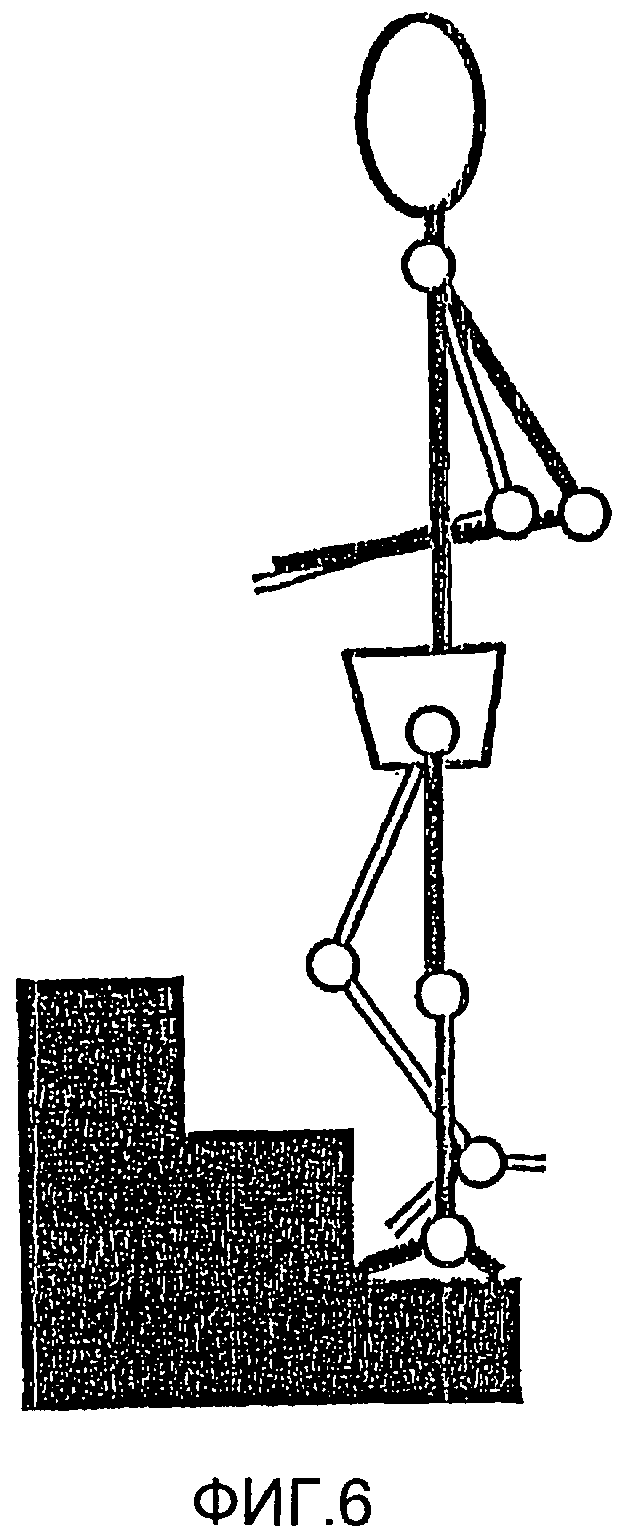
На фиг.6 показано полное вытяжение снабженной протезом 2 коленного сустава ноги. Контрлатеральная нога 4 проводится мимо протезной ноги 20 и устанавливается на следующую более высокую ступеньку, так что обеспечивается возможность попеременного подъема по лестнице с помощью пассивного протеза коленного сустава.
В соответствии с этим, управление установлено так, что во время подъема протезной стопы 6 устанавливается сопротивление сгибанию, которое допускает угол α колена, который обеспечивает возможность наступания протезной стопой 6 на следующую более высокую ступеньку. Поддержка сгибания с помощью пружинного механизма может облегчать подъем и преодоление высоты ступеньки.
Если после инициирования режима подъема по лестнице за счет обнаружения подъема с небольшим моментом стопы не должно следовать активное действие, то устанавливается свободное вытяжение, при этом установка свободного вытяжения осуществляется в зависимости от времени. Зависимость от времени может осуществляться также механически. Обнаружение подъема стопы с небольшим моментом можно осуществлять с помощью инерции, когда сначала ставится здоровая нога, и лишь вторая ступенька лестницы должна преодолеваться с помощью снабженной протезом ноги. Если сначала происходит разгрузка протезной стопы, а затем сгибание в протезе коленного сустава, то подлежит установке подъем по лестнице. Демпфирование сохраняется как в направлении вытяжения, так и в направлении сгибания после фазы подъема, т.е. во время фазы разгибания бедра, пока не будет достигнуто, соответственно, обнаружено полное вытяжение протеза коленного сустава.
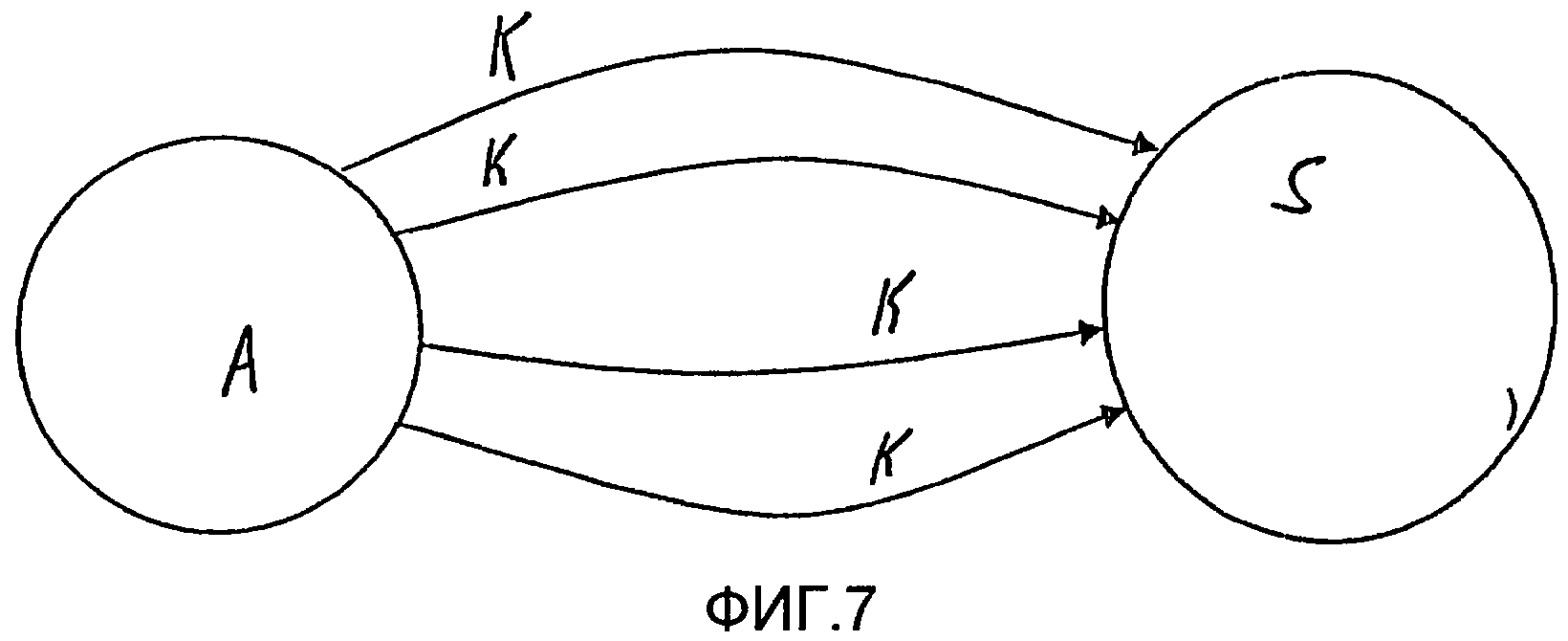
На фиг.7 показана схема выполнения способа. Исходя из исходного положения А, которое определяется с помощью датчиков на протезе или ортезе, сравнивают данные датчиков с заданными значениями или диапазонами значений, которые хранятся в блоке памяти и объединены в различные критерии К. Предпочтительно, несколько состояний сигналов или ходов изменения сигналов датчиков задают один критерий К.
Если, например, измеряется определенная осевая сила в соединении с углом колена и вертикальным движением, то при определенных значениях датчиков может образовываться критерий, что необходимо установить особую функцию S преодоления препятствия, что приводит к соответствующему регулированию демпфирования вытяжения и сгибания. Аналогичным образом, при быстром падении осевой силы, при разогнутом или разгибающемся колене, а также при осевой силе ниже уровня, может выполняться критерий К для особой функции S преодоления препятствия, так что должны осуществляться соответствующие регулирования демпфирования. Определяемые критерии К инициируют соответствующие необходимые действия, например уменьшение или увеличение демпфирования сгибания и/или вытяжения, снятие блокирования, регулирование привода или юстирование или снятие упора.
Преодоление препятствий можно обнаруживать также при уменьшении осевой силы ниже определенного уровня и разгибании колена, а также может выполняться критерий за счет выполнения определенного наклона голени, соответственно, шины голени в пространстве, угла колена и небольшого момента в колене. Вертикальное ускорение вверх при разогнутом колене и относительно небольшом уровне осевой силы может быть также критерием для особой функции, например преодоления препятствия или попеременного подъема по лестнице.
Кроме того, можно сравнивать несколько состояний сигналов или ходов изменения состояний сигналов, исходя из исходного состояния А, с различными критериями К. Уравновешивание нескольких критериев друг с другом, а также объединение нескольких состояний сигналов в один критерий К обеспечивает дополнительную безопасность. Чем больше число состояний сигналов, соответственно, изменений состояний сигналов внутри одного критерия, тем точнее определяется соответствующее состояние ортопедического устройства, соответственно, пациента, а также точнее описывается ситуация при ходьбе. На основании этой информации и состояний сигналов или изменений состояний сигналов внутри предусмотренных параметров для критерия К можно затем осуществлять, например, целенаправленное изменение характеристики демпфирования и в ходе движения ортопедического устройства.
Несколько критериев К могут инициировать одинаковую особую функцию S, за счет чего обеспечивается возможность максимальной надежности относительно правильного обнаружения состояния движения. Это необходимо, поскольку особые функции S, такие как переступание через препятствие или попеременный подъем по лестнице или спуск по лестнице, своими процессами движения значительно отличаются от ходьбы по плоскости, однако распознавание этой особой функции S трудно выполнимо из ходьбы по плоскости. В то время как раньше обходились тем, что выполняли особенно характерные движения для установки особой функции S, например несколько качаний передней частью ступни, то с помощью данного способа можно осуществлять автоматическое согласование характеристик демпфирования с соответствующей ситуацией при ходьбе.
Ходьба по плоскости требует обычно укорочения ноги, которая после подъема стопы должна переставляться вперед. Если нога не укорачивается, то за счет подъема бедра или кругового движения можно создавать достаточный просвет над основанием. Физиологически нога становится короче также за счет сгибания колена. В ножных протезах, которые заменяют колено и голень, отношение масс голени и временные, а также моторные краевые условия при ходьбе приводят к тому, что голень поворачивается слишком далеко назад и поэтому ножной протез не разгибается своевременно и тем самым не может нагружаться. Поэтому пациенты ходят очень медленно, или же протезы снабжаются подходящим управлением фазой взмаха, которое явно демпфирует маятниковые характеристики голени. Работоспособные системы демпфирования сгибания учитывают различные скорости ходьбы и всегда обеспечивают столько свободного просвета для ноги, что пользователь протеза не спотыкается, однако нога для следующей фазы нагрузки своевременно снова разгибается. Чем быстрей идет пользователь, тем сильнее действует демпфирование.
Однако для подъема по лестнице колено необходимо сгибать значительно дальше, чем при ходьбе по плоскости, чтобы предотвращать застревание на подлежащей преодолению кромке ступеньки лестницы. Для преодоления небольших препятствий одним шагом также можно использовать уменьшение демпфирования сгибания. Однако необходимое для этого, более низкое демпфирование сгибания по указанным выше причинам не пригодно для ходьбы по плоскости. Для обнаружения соответствующего необходимого демпфирования сгибания для следующего шага можно объединять несколько данных датчиков внутри одного критерия, и при выполнении соответствующих параметров инициировать особую функцию. Если оценивается наклон голени в пространстве, то при не нагруженном протезе или ортезе и не согнутом колене можно активировать уменьшенное сопротивление сгибанию для подъема по лестнице. Если протезная нога при разогнутом колене разгружается, то можно за счет скорости падения нагрузки уже перед полной разгрузкой протеза активировать уменьшенное сопротивление сгибанию для подъема по лестнице. За счет этого пользователь имеет больше времени для инициирования сгибания. Для предотвращения слишком раннего отключения демпфирования сгибания, например, когда обнаруживается уменьшение осевой силы при стоянии в автомобиле на неровной дороге, можно привлекать абсолютное значение осевой силы в качестве дополнительного параметра для критерия.
Можно также посредством оценки хода изменения угла бедра и голени относительно друг друга обнаруживать различие между подъемом по лестнице и ходьбой по плоскости. Если бедро слегка сгибается назад, то следует ожидать уменьшения демпфирования сгибания.
Для управления голеностопным суставом предпочтительно, когда определяют, что пальцы ноги, соответственно, зона передней части стопы движется назад с целью преодоления ступеньки лестницы или препятствия. В этом случае при постановке пятки не должно допускаться дорсальное сгибание для облегчения подъема по лестнице. В соответствии с этим, после постановки пятки увеличивают сопротивление дорсальному сгибанию. В противоположность этому, при спуске по лестнице желательно сильное подошвенное сгибание при постановке стопы. Для обеспечения возможности постановки протезной стопы на полную поверхность или снятия стопы должно допускаться дорсальное сгибание, однако с повышенным сопротивлением для обеспечения контролируемой постановки стопы.
В принципе необходимо также сопротивление разгибанию в ортопедическом устройстве, в частности в коленном суставе, с целью направления пациента к активному управлению и действию. Ортопедические коленные суставы, которые обеспечивают возможность подъема по лестнице, известны из уровня техники. С помощью большого демпфирования в направлении сгибания пользователь ортопедического устройства может контролируемым образом оседать на коленном суставе и тем самым достигать следующей ступеньки лестницы. Большое сопротивление сгибанию вызывает равномерное движение и разгружает тем самым контрлатеральную сторону. При подъеме по лестнице движение в здоровом колене поддерживается с помощью разгибающего колено момента. Этот момент обеспечивается мышцами. Известны ортопедические устройства, которые имеют коленный сустав, который обеспечивает возможность разгибания колена с помощью исполнительных механизмов. На основании требуемой энергии и возникающих сил необходим относительно тяжелый и зависящий от внешней энергии коленный сустав.
В ортезах или протезах нижней конечности можно во многих случаях создавать бедром достаточно большой момент разгибания, чтобы приводить колено в разгибание при подъеме по лестнице. Однако как только колено начинает разгибаться, оно движется относительно центра тяжести тела назад, так что увеличивается разгибающий колено момент. Это действие является самоусиливающимся. На основании увеличивающегося эффективного рычажного плеча происходит не контролируемое разгибание с жестким, не комфортным конечным упором. Для обеспечения согласованных с подъемом по лестнице характеристик ортопедического устройства без подвода внешней энергии предусмотрено, что в управлении с помощью регулируемого исполнительного механизма осуществляется значительное увеличение демпфирования разгибания. Это демпфирование действует против действующего на коленный сустав разгибающего момента и предпочтительно выбирается так, что возможно почти постоянное, хорошо контролируемое разгибание. Это может быть обеспечено уже с помощью постоянного демпфирования. Возможно также предусмотреть увеличивающееся при разгибании демпфирование с целью компенсации того, что при увеличивающемся разгибании коленного сустава к центру тяжести тела на коленный сустав действует все большее эффективное рычажное плечо.
Наступание на следующую более высокую ступеньку с согнутым коленом можно осуществлять по выбору с помощью установленных на ортопедическом устройстве датчиков или с помощью приводимого механически в действие при наступании исполнительного механизма, такого как, например, поршень, сдвигаемый в суставе на основании осевой силы, действующей на ортопедическое устройство. При этом демпфирование вытяжения повышается до уровня, который превышает уровень для ходьбы по плоскости.
На фиг.8 показан вариант выполнения изобретения, в котором исходя из исходного положения А1 с помощью нескольких критериев К может вызываться особая функция S1. Если на ортопедическом устройстве определяют несколько параметров, то различные параметры можно объединять в различные критерии. За счет этого возможно, что два различных критерия могут приводить к инициированию одной особой функции S.
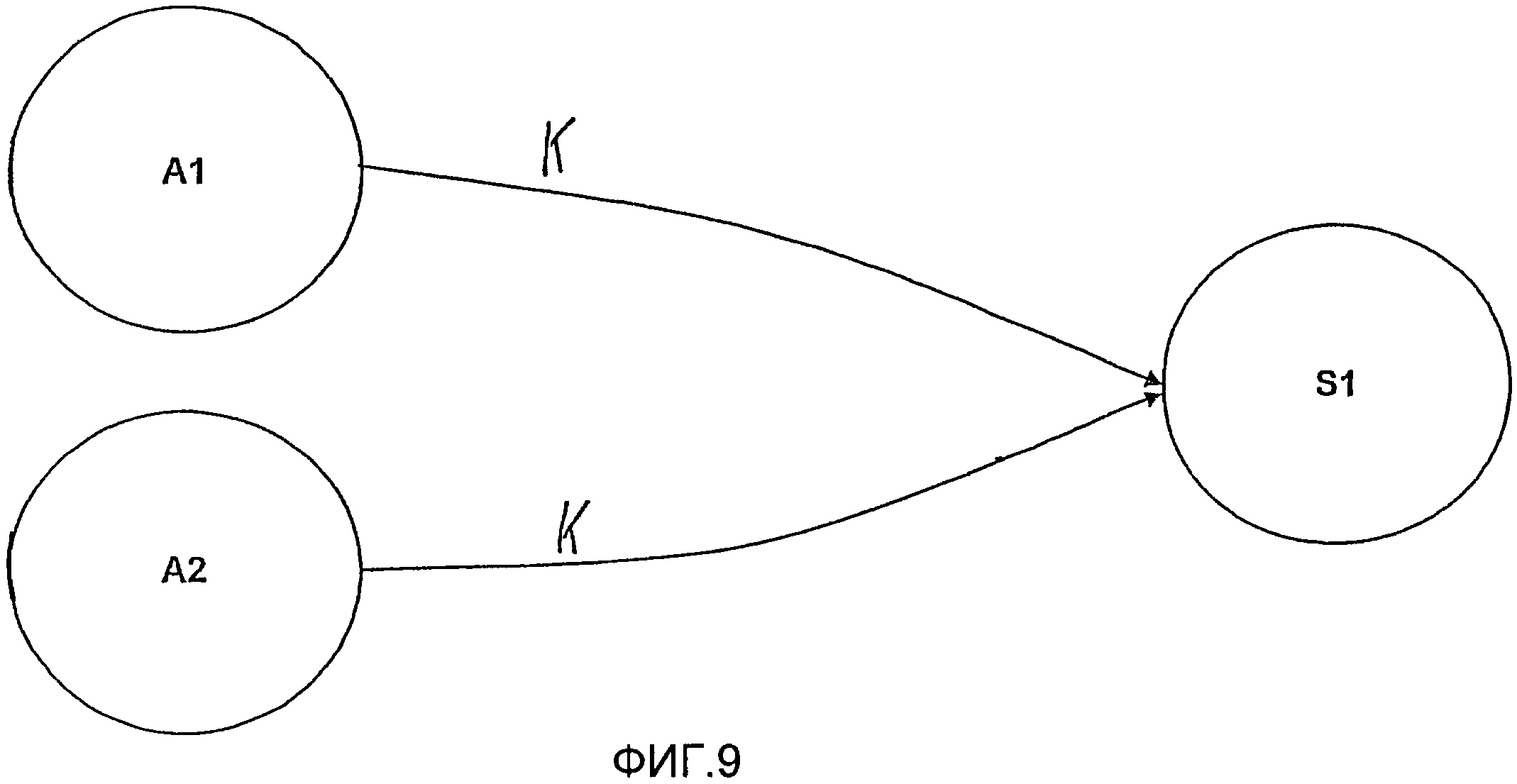
Один вариант выполнения изобретения показан на фиг.9, в котором из различных исходных положений А1, А2 можно с помощью различных критериев К переключиться именно в одну особую функцию S.
В заключение на фиг.10 показано, что из одного исходного положения А1 можно с помощью различных критериев К и изменений параметров переключаться в различные особые функции S1, S2, S3. Так, может случиться, что имеются идентичные моментальные значения соответствующих параметров в исходной ситуации A1, например осевой силы, угла колена и момента, однако с помощью хода их изменения можно прогнозировать различные ситуации при ходьбе и поэтому инициировать соответствующие особые функции S1, S2, S3 тем, что подключаются или отключаются приводы, отключаются накопители энергии, изменяются устройства демпфирования или активируются тормоза. Можно также переставлять упоры или убирать стопоры.
Ортопедическое переходное устройство
Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы
Ортопедическая часть стопы и способ управления искусственной стопой
Приемная гильза протеза и система из приемной гильзы протеза и протезного устройства
Ортопедический гидравлический амортизатор
Ортопедический коленный сустав, а также способ управления ортопедическим коленным суставом
Прокладка для вакуумных стволов и применение прокладки
Ортез коленного сустава
Шарнирная вставка
Структурный элемент для ортопедического устройства
Ортопедическое переходное устройство
Пассивное ортопедическое вспомогательное средство в виде протеза или ортеза стопы
Ортопедическая часть стопы и способ управления искусственной стопой
Приемная гильза протеза и система из приемной гильзы протеза и протезного устройства
Ортопедический гидравлический амортизатор
Корригирующий шарнир
Ортопедический коленный сустав, а также способ управления ортопедическим коленным суставом
Прокладка для вакуумных стволов и применение прокладки
Ортез коленного сустава
Шарнирная вставка

