Результат интеллектуальной деятельности: ВСПОМОГАТЕЛЬНОЕ ПРИВОДНОЕ УСТРОЙСТВО АВТОМОБИЛЯ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к вспомогательному приводному устройству автомобиля, такому как система содействия в поддержании положения автомобиля относительно дорожной разметки (Lane Keep Assist, LKA) «помощник для сохранения полосы движения», в автомобиле, обеспеченном различными управляющими механизмами, такими как электрический усилитель рулевого управления «EPS», рулевое управление с переменным передаточным числом «VGRS», система активного управления задними колесами «ARS» или управление по проводам «SBW».
Уровень техники
[0002] В качестве устройств такого типа предлагалось устройство для предоставления возможности вождения автомобиля с удержанием полосы с использованием электрического усилителя рулевого управления и устройства для изменения угла поворота (угла поворота рулевого управления) (см. патентный документ 1). В соответствии с устройством контроля рулевого управления автомобиля, описанном в патентном документе 1 (здесь и далее называемым «традиционная технология»), автомобиль может хорошо управляться на заданном маршруте движения путем управления электрического усилителя руля для получения заданного угла отклонения (угла поворота управляемых колес) на основе радиуса кривизны во время движения с поддержанием положения автомобиля относительно дорожной разметки и путем контроля отклонения угла рыскания и поперечного расположения автомобиля (бокового смещения) относительно маршрута.
[0003] В частности, известно устройство для установки требуемого угла поворота Δδt на основе требуемого угла поворота Δδt1 для того, чтобы заставить автомобиль двигаться по заданному маршруту движения, и требуемого угла рулевого управления Δδts для приведения поведения автомобиля как можно ближе к нормативному состоянию (см. патентный документ 2).
[0004] В этой связи, также известно устройство для увеличения величины поправки для корректирования требуемого переменного угла поворота в зависимости от увеличения угла рыскания (см. патентный документ 3).
[0005] Патентный документ 1: опубликованная патентная заявка Японии №2007-160998.
Патентный документ 2: опубликованная патентная заявка Японии №2006-143101.
Патентный документ 3: опубликованная патентная заявка Японии №2008-137612.
Сущность изобретения
Задача, решаемая изобретением
[0006] Когда некоторая движущая сила прямо или косвенно приложена к управляемым колесам, чтобы таким образом изменить угол поворота и следовать по заданному маршруту, усилие реакции от системы рулевого управления, включая управляемые колеса, действует таким образом на рулевое колесо, и в предельном случае используется рулевое колесо с цифровым управлением. Кроме того, в конфигурации, в которой угол отклонения (угол поворота управляемых колес) может быть изменен приложением к системе рулевого управления вспомогательного крутящего момента для содействия крутящему моменту рулевого управления, задаваемому водителем, рулевое колесо управляется независимо от желания водителя, отчего водитель, скорее всего, испытает дискомфорт. Другими словами, с использованием одного механизма управления обычно сложно осуществить следование по заданному маршруту.
[0007] С другой стороны, в вышеуказанной традиционной технологии применяется множество механизмов рулевого управления, таких как электрический усилитель рулевого управления и устройство для изменения угла поворота; однако, каждый из этих механизмов просто берет на себя часть управления, связанного с поддержанием полосы движения. Таким образом, если осуществляется попытка установить требуемый угол поворота на основе радиуса кривизны путем использования электрического усилителя рулевого управления, едва ли возможно избежать роста ощущения дискомфорта. Также, если предпринимается попытка управлять отклонением угла рыскания и поперечным расположением автомобиля (боковым смещением) относительно маршрута путем использования устройства для изменения угла поворота, то влияние силы реакции на рулевое колесо воздействует на поведение автомобиля.
[0008] В этой связи, далее с ростом ощущения дискомфорта, этот тип дискомфортного ощущения с высокой вероятностью приведет к нежелательным управляющим действиям водителя, так что это может вызвать неустойчивое поведение автомобиля. Кроме того, например, если угол отклонения на единицу угла поворота (автомобиля) увеличивается, то путем использования устройства изменения угла поворота, или подобного ему, есть возможность откорректировать угол поворота, необходимый для получения требуемого угла отклонения, соответственно в меньшую сторону. Однако, если угол отклонения на единицу угла поворота увеличивается так, как описано выше, угол отклонения значительно изменяется по отношению к воздействиям рулевого управления, выполняемым по желанию водителя, и устойчивость автомобиля снижается, что приводит к неустойчивому поведению автомобиля. Как описано выше, традиционная технология обладает такой технической проблемой, что поведение автомобиля может быть неустойчиво, когда автомобиль заставляют следовать по заданному маршруту движения.
[0009] Ввиду вышеуказанных задач, таким образом, целью настоящего изобретения является предложить приводное вспомогательное устройство автомобиля, способное заставить автомобиль следовать по заданному маршруту движения, не вызывая неустойчивого поведения автомобиля.
Средства решения задачи
[0010] Указанная цель настоящего изобретения может быть достигнута приводным вспомогательным устройством автомобиля, при этом автомобиль оборудован: вспомогательным устройством для крутящего момента рулевого управления, способным оказывать содействие крутящему моменту рулевого управления, приложенному к входному валу рулевого управления через рулевое колесо; и устройством изменения угла отклонения, способным изменять соотношение между углом поворота, как углом поворота входного вала рулевого управления, и углом отклонения, как углом поворота управляемых колес, при этом вспомогательное приводное устройство автомобиля снабжено: первым задающим устройством для установки первого контрольного целевого значения, соответствующего одному из следующих устройств: вспомогательное устройство для крутящего момента рулевого управления и устройство изменения угла отклонения, чтобы заставить автомобиль двигаться по заданному маршруту следования; первым управляющим устройством для управления указанным одним устройством на основе установленного первого целевого контрольного значения; вторым задающим устройством для установки второго целевого контрольного значения, соответствующего другому устройству, для того, чтобы подавлять изменения в поведении автомобиля, вызванные, когда автомобиль заставляют следовать заданным маршрутом движения, вследствие управления упомянутым одним устройством; и вторым управляющим устройством для управления упомянутым другим устройством на основе установленного второго целевого контрольного значения.
[0011] Автомобиль обеспечивается, по меньшей мере, вспомогательным устройством для крутящего момента рулевого управления и устройством изменения угла отклонения.
[0012] Вспомогательное устройство для крутящего момента рулевого управления по настоящему изобретению включает, по существу, устройство, способное содействовать крутящему моменту рулевого управления от водителя, соответствующему искусственному вводу рулевого управления, приложенному водителем к входному валу рулевого управления, который прямо или косвенно соединен с рулевым колесом (обычно именуемым "ручка управления"). В то же время, аспект содействия крутящему моменту рулевого управления от водителя во вспомогательном устройстве для крутящего момента рулевого управления может быть по существу произвольным, находящемся только в рамках практических ограничений (при условии, что такие ограничения имеются), основанных, по меньшей мере, на пространстве для установки, стоимости, долговечности, надежности и т.п., независимо от прямого или косвенного соединения.
[0013] Другими словами, вспомогательное устройство для крутящего момента рулевого управления может быть сконструировано таким образом, что оно прикладывает вспомогательный крутящий момент к входному валу рулевого управления для прямой поддержки крутящего момента рулевого управления, или таким образом, что оно прикладывает такой тип вспомогательного крутящего момента к выходному валу рулевого управления, прямо или косвенно соединенному с входным валом рулевого управления, или таким образом, что оно может прикладывать вспомогательный крутящий момент для содействия повороту ведущей шестерни, которая входит в зацепление с зубчатой рейкой, если система рулевого управления выбирает рулевой механизм с реечной передачей, или таким образом, что оно может прикладывать движущее усилие к зубчатой рейке для содействия возвратно-поступательному движению этой зубчатой рейки. В соответствии со вспомогательным устройством для крутящего момента рулевого управления крутящий момент рулевого управления в итоге прикладывается к входному валу рулевого управления через физический или механический канал передачи, включая различные механизмы передачи и валы различных форм. Таким образом, становится возможным снизить нагрузку на водителя при рулевом управлении, или удерживать рулевое колесо вместо водителя, или вращать входной вал рулевого управления независимо от действий водителя при рулевом управлении.
[0014] С другой стороны, устройство изменения угла отклонения по настоящему изобретению включает по сущности различные физические, механические, электрические или магнитные устройства, способные варьировать соотношение между углом поворота, как углом поворота входного вала рулевого управления, и углом отклонения, как углом поворота управляемых колес, поэтапно или непрерывно. Другими словами, в соответствии с устройством изменения угла отклонения, соотношение между углом поворота и углом поворота колес не определяется однозначно, и, например, соотношение между углом поворота и углом отклонения может быть изменено. В качестве альтернативы, угол отклонения может быть изменен независимо от угла поворота. Устройство изменения угла отклонения может быть сконструировано, например, в виде рулевого управления с переменным передаточным числом «VGRS», системы с управлением по проводам «SBW» или подобных систем, в качестве предпочтительной формы.
[0015] В соответствии с приводным вспомогательным устройством автомобиля по настоящему изобретению, при его работе, например, первое целевое контрольное значение устанавливается первым задающим устройством, которое может выбирать образцы различных устройств обработки данных, таких, как ECU (Блок электронного управления) и различных компьютерных систем, таких как различные микрокомпьютерные устройства или контроллеры.
[0016] Первое целевое контрольное значение является целевым контрольным значением, которое соответствует одному из устройств: вспомогательное устройство для крутящего момента рулевого управления и устройство изменения угла отклонения, и которое служит, чтобы заставить автомобиль следовать по заданному маршруту движения. При установке первого целевого контрольного значения могут применяться различные известные алгоритмы. Например, изгиб заданного маршрута движения, отклонение положения и отклонение (угла) рыскания между автомобилем и белой линией или подобные данные для характеристики заданного маршрута движения, подобным образом могут быть рассчитаны или определены на основе изображения заданного маршрута движения, показываемого камерой автомобиля или подобным устройством. На их основе может быть рассчитано или приблизительно определено требуемое поперечное ускорение для того, чтобы заставить автомобиль следовать по заданному маршруту движения. После этого на основе рассчитанного или определенного требуемого поперечного ускорения может быть установлено первое целевое контрольное значение, как требуемый вспомогательный крутящий момент, которое является требуемым значением вспомогательного крутящего момента, который должен быть получен на выходе вспомогательного устройства для крутящего момента рулевого управления, или как требуемый угол отклонения, который является требуемым значением величины изменения угла отклонения, который должен быть осуществлен устройством изменения угла отклонения.
[0017] Если установлено первое целевое контрольное значение, первое устройство, соответствующее установленному первому целевому контрольному значению, управляется на основе этого установленного первого целевого контрольного значения этим первым управляющим устройством, которое может взять по выбору образцы различных устройств обработки данных, таких как ECU, и различных компьютерных систем, таких как различные микрокомпьютерные устройства или контроллеры. Другими словами, в соответствии со вспомогательным устройством для управления автомобилем по настоящему изобретению, одно из вспомогательных устройств для крутящего момента рулевого управления и устройств, изменяющих угол отклонения, действует в качестве первичной системы (здесь и далее при необходимости именуемой «главной системой»), чтобы заставить автомобиль следовать заданным маршрутом движения.
[0018] В данном случае, используется ли в качестве этой главной системы вспомогательное устройство для крутящего момента рулевого управления или устройство, изменяющее угол отклонения, поведение автомобиля имеет тенденцию к неустойчивости при следовании заданным маршрутом движения в силу возрастания ощущения дискомфорта, снижения устойчивости к отклонениям и т.п., как описано выше.
[0019] Таким образом, в соответствии со вспомогательным приводным устройством автомобиля по настоящему изобретению, другое устройство по отношению к первому устройству управляется совместно с этим первым устройством, как устройство подавления для подавления такого типа неустойчивости поведения автомобиля. Другими словами, в соответствии со вспомогательным приводным устройством автомобиля по настоящему изобретению при его работе второе целевое контрольное значение, соответствующее этому другому устройству, установлено таким образом, чтобы подавлять изменение в поведении автомобиля, вызываемое, когда автомобиль заставляют следовать заданному маршруту движения в результате управления упомянутым первым устройством, с помощью второго задающего устройства, которое может взять по выбору образцы различных устройств обработки данных, таких как ECU, и различных компьютерных систем, таких как различные микрокомпьютерные устройства или контроллеры. Кроме того, если задано второе контрольное значение, то упомянутое другое устройство управляется на основе установленного второго целевого контрольного значения вторым управляющим устройством, которое может взять по выбору образцы различных устройств обработки данных, таких как ECU, и различных компьютерных систем, таких как различные микрокомпьютерные устройства или контроллеры.
[0020] Таким образом, в соответствии со вспомогательным приводным устройством автомобиля по настоящему изобретению, даже если в качестве главной системы используется одно из устройств: вспомогательное устройство для крутящего момента рулевого управления или устройство изменения угла отклонения, изменение в поведении автомобиля, вызванное следованием заданным маршрутом движения, ослабляется и идеально исключается путем осуществления управления упомянутым устройством, которое действует как устройство подавления. Другими словами, есть возможность стабилизировать поведение автомобиля, когда автомобиль заставляют следовать заданному маршруту движения.
[0021] В данном случае, в частности, приводное вспомогательное устройство автомобиля по настоящему изобретению имеет значительные преимущества перед любым из известных технических решений в том, что вспомогательное устройство для крутящего момента рулевого управления и устройство изменения угла отклонения управляются совместно во взаимосвязи для стабилизации такого типа поведения автомобиля. Другими словами, в пределах традиционного технического решения, которое не содержит технического решения такого типа, с наличием или без наличия множества устройств, способных управлять углом отклонения, включая вспомогательное устройство для крутящего момента рулевого управления, влияние работы упомянутого первого устройства на поведение автомобиля не учитывается. Таким образом, если первичное воздействие, вызванное непосредственно работой упомянутого первого устройства (например, имеет место работа рулевого управления независимо от желания водителя, как описано выше), может быть подавлено (например, в этом случае, когда величина изменения угла отклонения относительно угла рулевого управления увеличивается, и т.п.), то может иметь место вторичное или многоуровневое воздействие дестабилизации поведения автомобиля (например, снижение устойчивости поведения автомобиля к отклонениям в силу увеличенного значения изменения угла отклонения относительно угла рулевого управления, примененного водителем). Другими словами, в конечном счете, поведение автомобиля вовсе не может быть улучшено.
[0022] В одном из аспектов приводного вспомогательного устройства автомобиля по настоящему изобретению, устройство изменения угла отклонения изменяет соотношение путем относительного поворота выходного вала рулевого управления, соединенного с управляемыми колесами, по отношению к входному валу рулевого управления, первое задающее устройство устанавливает требуемый вспомогательный крутящий момент как первое целевое контрольное значение, первое управляющее устройство управляет вспомогательным устройством для крутящего момента рулевого управления на основе установленного требуемого вспомогательного крутящего момента, второе задающее устройство устанавливает передаточное отношение рулевого управления для определения угла поворота выходного вала рулевого управления по отношению к углу поворота (рулевого управления), с тем, чтобы уменьшить передаточное отношение рулевого управления по сравнению с режимом без поддержки следования по заданному маршруту движения, как второе целевое контрольное значение, и второе контролирующее устройство контролирует устройство, изменения угла отклонения на основе требуемого передаточного отношения рулевого управления.
[0023] В соответствии с этим типом, устройство изменения угла отклонения, может взять по выбору систему VGRS или подобное устройство, способное изменять соотношение между углом поворота и углом отклонения с помощью относительного поворота выходного вала рулевого управления по отношению к входному валу рулевого управления с использованием приводного усилия, такого как крутящий момент привода, обеспечиваемый приводным устройством, таким как электродвигатель. В соответствии с конструкцией устройства изменения угла отклонения передаточное отношение рулевого управления для определения угла поворота выходного вала рулевого управления по отношению к углу поворота (т.е. большое или малое значение передаточного отношения рулевого управления соответствует большому или малому значению угла отклонения по отношению к первому углу поворота, соответственно) может управляться в сравнительно произвольном диапазоне.
[0024] В соответствии с этим аспектом, когда осуществляется попытка следовать по заданному маршруту движения со вспомогательным устройством для крутящего момента рулевого управления в качестве главной системы, передаточное отношение рулевого управления устанавливается вторым задающим устройством в сторону снижения по сравнению с режимом без поддержки следования по заданному маршруту движения как, по меньшей мере, одна часть второго целевого контрольного значения.
[0025] Другими словами, в соответствии с этим аспектом, степень изменения угла поворота выходного вала рулевого управления (который однозначно является углом отклонения) по отношению к углу поворота (углу поворота рулевого колеса) уменьшается по сравнению с таковой при режиме без поддержки следования по заданному маршруту движения. Таким образом, даже, если ввод рулевого управления (например, экстренное уклонение, экстренный маневр и т.п.) подается на рулевое колесо водителем по целесообразным причинам во время периода, в течение которого автомобиль заставляют следовать по заданному маршруту движения, или даже если ввод рулевого управления выполняется независимо от желания водителя в силу форс-мажорных обстоятельств и т.п., воздействие на угол отклонения соответственно смягчается. Другими словами, есть возможность относительно стабилизировать поведение автомобиля.
[0026] В другом аспекте приводного вспомогательного устройства автомобиля по настоящему изобретению, устройство изменения угла отклонения изменяет соотношение путем относительного поворота выходного вала рулевого управления, соединенного с управляемыми колесами, по отношению к входному валу рулевого управления, первое задающее устройство устанавливает требуемый вспомогательный крутящий момент как первое целевое контрольное значение, первое управляющее устройство управляет вспомогательным устройством для крутящего момента рулевого управления на основе этого установленного требуемого вспомогательного крутящего момента, второе задающее устройство устанавливает требуемый угол относительного поворота выходного вала рулевого управления по отношению к входному валу рулевого управления с тем, чтобы уменьшить угол поворота, необходимый для того, чтобы заставить автомобиль следовать по заданному маршруту движения, как второе целевое контрольное значение, и второе управляющее устройство управляет устройством изменения угла отклонения на основе этого установленного требуемого угла относительного поворота.
[0027] В соответствии с этим аспектом, устройство изменения угла отклонения способно взять по выбору VGRS или подобное устройство, способное изменять соотношение между углом поворота и углом отклонения путем относительного поворота выходного вала рулевого управления по отношению к входному валу рулевого управления с использованием приводного усилия, такого как крутящий момент привода, обеспечиваемый приводным устройством, таким, как электродвигатель. В соответствии с конструкцией устройства изменения угла отклонения, передаточное отношение рулевого управления для определения угла поворота выходного вала рулевого управления по отношению к углу поворота (т.е. большое или малое значение передаточного отношения рулевого управления соответствует большому или малому значению угла отклонения по отношению к первому углу поворота соответственно) может контролироваться в сравнительно произвольном диапазоне. С другой стороны, в соответствии с конструкцией устройства изменения угла отклонения, также есть возможность поворачивать выходной вал рулевого управления независимо от этого типа передаточного отношения рулевого управления. Другими словами, угол отклонения может быть изменен даже без входного устройства рулевого управления, которое участвует в изменении угла поворота.
[0028] В соответствии с этим аспектом, второе задающее устройство устанавливает требуемый угол относительного поворота выходного вала рулевого управления таким образом, чтобы уменьшить угол поворота, необходимый для того, чтобы заставить автомобиль двигаться по заданному маршруту движения, как второе контрольное значение. Кроме того, устройство изменения угла отклонения управляется вторым управляющим устройством на основе установленного требуемого угла относительного поворота. В результате выходной вал рулевого управления поворачивается относительно входного вала рулевого управления на величину, соответствующую требуемому углу относительного поворота.
[0029] В данном случае выходной вал рулевого управления только поворачивается относительно входного вала рулевого управления, и никакая сила не передается по отношению к входному валу рулевого управления, когда выходной вал рулевого управления приводится во вращение вторым управляющим устройством. Таким образом, в соответствии с этим аспектом, изменение угла поворота подавляется вспомогательным устройством для крутящего момента рулевого управления в период, в котором осуществляется попытка следовать заданным маршрутом движения с приложением вспомогательного крутящего момента или подобного ему. Другими словами, если это наблюдается со стороны водителя, то предпочтительно уменьшается такое ощущение дискомфорта, что рулевое колесо вращается без воздействия на рулевое колесо водителем. Ослабление от ощущения дискомфорта такого типа подавляет возникновение нежелательных действий по рулевому управлению, выполняемых водителем, поскольку это ослабляет психологическое напряжение водителя. Другими словами, в результате имеется возможность получить устойчивое поведение автомобиля.
[0030] В данном случае, в частности, если второе задающее устройство выполняет установку передаточного отношения рулевого управления (установку в сторону уменьшения по сравнению с режимом без поддержки следования по заданному маршруту движения) в дополнение к этому типу требуемого угла относительного поворота, как второго целевого контрольного значения, становится возможным снизить воздействие ввода рулевого управления водителем на изменение угла отклонения при одновременном уменьшении угла поворота установкой требуемого угла относительного поворота, что очень полезно на практике.
[0031] В одном из аспектов приводного вспомогательного устройства автомобиля по настоящему изобретению, в котором задается требуемый угол относительного поворота, второе задающее устройство устанавливает требуемый угол относительного поворота в соответствии с условиями движения автомобиля.
[0032] Если условия движения, как концепция, включающая условия работы автомобиля, условия окружающей среды и т.п. различаются, то также могут различаться соотношения для угла относительного поворота, необходимого для выходного вала рулевого управления. В соответствии с этим аспектом, поскольку требуемый угол относительного поворота устанавливается в соответствии с условиями движения автомобиля, то есть возможность развеять беспокойство о том, что относительный поворот выходного вала рулевого управления дестабилизирует поведение автомобиля, в зависимости от обстоятельств. С точки зрения динамики движения или динамики человека, на основании экспериментов, опытных данных, теорий, моделирования и т.д. практический аспект, связанный с этим типом вождения автомобиля и установкой требуемого угла относительного поворота в соответствии с этим выбором, в сущности, может быть надлежащим образом определен таким образом, чтобы стабилизировать поведение автомобиля в некоторых пределах по сравнению со случаями, когда такой тип рассмотрения вовсе не производится.
[0033] В этой связи, в этом аспекте, второе задающее устройство может установить требуемый угол относительного поворота таким образом, чтобы уменьшить величину снижения угла поворота рулевого управления с увеличением кривизны заданного маршрута движения.
[0034] С точки зрения водителя, естественно, что количество работы рулевого колеса увеличивается с увеличением кривизны заданного маршрута движения (т.е. обратной виртуальному радиусу заданного маршрута движения, означающей, что заданный маршрут движения резко искривляется с увеличением кривизны), и если автомобиль поворачивает, даже когда угол поворота рулевого управления равен нулю, сложно избежать нарастания ощущения дискомфорта. Как описано выше, установкой требуемого угла относительного поворота в соответствии с кривизной заданного маршрута движения, становится возможным выполнить следование по заданному маршруту движения с высокой точностью без создания ощущения дискомфорта у водителя.
[0035] Кроме того, в этом аспекте, второе задающее устройство может установить требуемый угол относительного поворота таким образом, чтобы снизить величину уменьшения угла поворота рулевого управления с увеличением скорости автомобиля.
[0036] Если скорость автомобиля (здесь и далее, по необходимости - «скорость автомобиля») высока, велико поперечное ускорение на единицу угла поворота рулевого управления. Таким образом, если значение снижения угла поворота рулевого управления привязано к скорости автомобиля, например автомобиль отклоняется от заданного маршрута движения в области высокой скорости автомобиля, и действительное направление поворота рулевого управления может быть противоположно требуемому направлению поворота рулевого управления. Альтернативно, если такой проблемы в области высокой скорости автомобиля удалось избежать, скорость следования по заданному маршруту движения, скорее всего, снизится в области низкой скорости автомобиля. Другими словами, в любом случае нет возможности стабилизации поведения автомобиля. Таким образом, путем установки требуемого угла относительного поворота в соответствии со скоростью автомобиля, возможно выполнить следование по заданному маршруту движения с высокой точностью без неустойчивого поведения автомобиля.
[0037] В другом аспекте приводного вспомогательного устройства автомобиля по настоящему изобретению, первое задающее устройство устанавливает требуемый угол отклонения как первое целевое контрольное значение, первое управляющее устройство контролирует устройство изменения угла отклонения на основе установленного требуемого угла отклонения, второе задающее устройство устанавливает требуемый вспомогательный крутящий момент так, чтобы исключить реактивный крутящий момент, прилагаемый к управляемым колесам с управлением устройством изменения угла отклонения на основе требуемого угла отклонения как второго целевого контрольного значения, а второе управляющее устройство управляет вспомогательным устройством для крутящего момента рулевого управления на основе установленного требуемого вспомогательного крутящего момента.
[0038] В соответствии с этим аспектом, требуемый угол отклонения, чтобы заставить автомобиль следовать заданным маршрутом движения, устанавливают как первое целевое контрольное значение, а устройство изменения угла отклонения управляется на основе этого установленного требуемого угла отклонения. Другими словами, в отличие от ранее указанных различных аспектов, это устройство изменения угла отклонения, выполняет функции основной системы для задачи следования заданным маршрутом движения.
[0039] В данном случае, если угол отклонения изменяется устройством изменения угла отклонения, надлежащий реактивный крутящий момент реакции прикладывается к входному валу рулевого управления, который может быть соединен с управляемыми колесами прямо или косвенно (В этой связи, если управляемые колеса, как управляемый объект устройства, изменения угла отклонения, являются задними, входной вал рулевого управления, предпочтительно, не соединен с управляемыми колесами, но передние колеса, как управляемые колеса, которые могут играть роль обычного рулевого управления автомобилем, могут быть соединены с входным валом рулевого управления). Если этот реактивный крутящий момент не загружен на стороне входного вала рулевого управления, рулевое колесо приводится во вращение в противоположном направлении этим реактивным крутящим моментом, путем использования такой системы рулевого управления, что инерция массы, трение и т.п. очевидно сильнее, чем рулевое колесо, в качестве опорной точки или точки опоры. В это время, если водитель удерживает рулевое колесо, то не будет проблем в работе устройства изменения угла отклонения, но водитель будет испытывать чрезмерно неестественное ощущение от рулевого управления, так как автомобиль поворачивает направо, когда рулевое колесо поворачивает налево в силу влияния реактивного крутящего момента, действующего в направлении, противоположном направлению поворота автомобиля.
[0040] Таким образом, в соответствии с этим аспектом, вспомогательное устройство для крутящего момента рулевого управления, которое работает на подавление изменения в поведении автомобиля, контролируемо управляется на основе требуемого вспомогательного крутящего момента, как второго целевого контрольного значения, установленного вторым задающим устройством с тем, чтобы нейтрализовать реактивный крутящий момент, прикладываемый к рулевому колесу, и реактивный крутящий момент, прикладываемый к рулевому колесу, в некоторой мере снижается, по крайней мере в сравнении со случаями, где вовсе не выполняется управление компенсацией реактивного крутящего момента такого типа. В качестве альтернативы, в идеале, такой тип реактивного крутящего момента полностью нейтрализуется. Таким образом, становится возможным, по меньшей мере, уменьшить ощущение дискомфорта, когда водитель удерживает рулевое колесо, и в идеале становится возможным заставить вынудить автомобиль следовать заданным маршрутом движения, даже в так называемом режиме «свободные руки», в котором водитель вовсе не удерживает рулевое колесо. Кроме того, в это время требуемый вспомогательный крутящий момент слегка снижает реактивный крутящий момент, генерируемый при следовании заданным маршрутом движения, и не имеет воздействия на крутящий момент рулевого управления, создаваемый водителем, который управляет рулевым колесом по собственной воле. Таким образом, отсутствует ухудшение в ощущении от рулевого управления.
[0041] В одном аспекте приводного вспомогательного устройства автомобиля по настоящему изобретению, в котором требуемый угол отклонения установлен, как первое целевое контрольное значение, управляемые колеса являются передними колесами, которые соединены с входным валом рулевого управления через выходной вал рулевого управления, и второе задающее устройство устанавливает требуемый вспомогательный крутящий момент таким образом, чтобы нейтрализовать по меньшей мере одну часть первой части реактивного крутящего момента, вызванного перемещением выходного вала рулевого управления, вторую часть реактивного крутящего момента, вызванную перемещением вспомогательного устройства для крутящего момента рулевого управления, и третью часть реактивного крутящего момента, вызванную осевым усилием от управляемых колес.
[0042] В случаях, когда устройство изменения угла отклонения функционирует как основная система, связанная со следованием по заданному маршруту движения, если управляемые колеса как объект управления углом отклонения устройством изменения угла отклонения, являются передними колесами, которые соединены с входным валом рулевого управления через выходной вал рулевого управления, вышеуказанный реактивный крутящий момент может быть определен первой частью реактивного крутящего момента, вызванной перемещением выходного вала рулевого управления, второй частью реактивного крутящего момента, вызванной перемещением вспомогательного устройства для крутящего момента рулевого управления, и третьей частью реактивного крутящего момента, вызванной осевым усилием, генерируемым при контакте передних колес с поверхностью дороги.
[0043] Таким образом, путем установки требуемого вспомогательного крутящего момента для нейтрализации, по меньшей мере, одной части, а желательно всех частей, имеется возможность эффективно снизить только реактивный крутящий момент, прикладываемый к рулевому колесу, когда автомобиль заставляют следовать заданным маршрутом движения с использованием устройства изменения угла отклонения, что является чрезвычайно полезным для практики для того, чтобы стабилизировать поведение автомобиля.
[0044] В этой связи, в этом аспекте, второе задающее устройство может установить требуемый вспомогательный крутящий момент, соответствующий первой части реактивного крутящего момента таким образом, что он включает (1) первое слагаемое для коррекции инерции, которое имеет тот же знак, что и угловое ускорение управляемых колес, и которое корректирует влияние инерции выходного вала рулевого управления, (2) первое значение для коррекции вязкости, которое имеет тот же знак, что и угловая скорость управляемых колес, и которое корректирует влияние вязкости на выходной вал рулевого управления, и (3) первое слагаемое для коррекции трения, которое имеет тот же знак, что и угловая скорость управляемых колес, и которое корректирует влияние трения на выходной вал рулевого управления.
[0045] Первая часть реактивного крутящего момента может в основном быть определена на основе инерции, вязкости и трения выходного вала рулевого управления. Таким образом, есть возможность точно определить требуемый вспомогательный крутящий момент, способный нейтрализовать на их основе первую часть реактивного крутящего момента.
[0046] Кроме того, в этом аспекте, второе задающее устройство может установить требуемый вспомогательный крутящий момент, соответствующий второй части реактивного крутящего момента так, чтобы включить (1) второе слагаемое для коррекции инерции, которое имеет тот же знак, что и угловое ускорение управляемых колес, и которое корректирует влияние инерции вспомогательного устройства для крутящего момента рулевого управления, (2) второе слагаемое для коррекции вязкости, которое имеет тот же знак, что и угловая скорость управляемых колес, и которое корректирует воздействие вязкости на вспомогательное устройство для крутящего момент рулевого управления, и (3) второе слагаемое для коррекции трения, которое имеет тот же знак, что и угловая скорость управляемых колес, и которое корректирует влияние трения на вспомогательное устройство для крутящего момента рулевого управления.
[0047] Вторая часть реактивного крутящего момента может быть в основном определена на основе инерции, вязкости и трения вспомогательного устройства для крутящего момента рулевого управления. Таким образом, есть возможность точно определить требуемый вспомогательный крутящий момент, способный на их основе нейтрализовать вторую часть реактивного крутящего момента.
[0048] Далее, в этом аспекте, второе задающее устройство может установить вспомогательный крутящий момент, соответствующий третьей части реактивного крутящего момента так, чтобы учитывать задержку реакции осевого усилия и, чтобы иметь тот же знак, что и угол отклонения.
[0049] Пока осевое усилие управляемых колес действительно передается на рулевое колесо как одна из компонент реактивного крутящего момента, имеется временная задержка реакции, которая может быть определена в соответствии с условиями движения автомобиля, конструкцией автомобиля и т.п. Таким образом, становится возможным точно определить требуемый вспомогательный крутящий момент, способный на основе задержки реакции нейтрализовать третью часть реактивного крутящего момента.
[0050] В другом аспекте приводного вспомогательного устройства автомобиля по настоящему изобретению, в котором требуемый угол отклонения задают как первое целевое контрольное значение, управляемые колеса могут быть задними колесами, не соединенными с входным валом рулевого управления, и второе задающее устройство может устанавливать требуемый вспомогательный крутящий момент, имеющий иной знак, чем угол отклонения, так, чтобы нейтрализовать реактивный крутящий момент, вызванный осевым усилием от этих управляемых колес, принимая во внимание задержку реакции от осевого усилия.
[0051] Если управляемые колеса, как объект управления углом отклонения устройством изменения угла отклонения, являются задними колесами, которые механически не соединены с входным валом рулевого управления, то имеется возможность точно определить требуемый вспомогательный крутящий момент, способный нейтрализовать реактивный крутящий момент, воздействующий на рулевое колесо, принимая во внимание временную задержку реакции, которая может быть определена в соответствии с условиями движения автомобиля, конструкцией автомобиля и т.п. Конечно, угол отклонения передних колес также меняется предпочтительно, по меньшей мере, в соответствии с обычной работой водителя с рулевым управлением; однако, в этом случае, это не зависит от следования автомобиля по заданному маршруту движения. Если объект управления устройства изменения угла отклонения включает как передние колеса, так и задние колеса, тогда, конечно, может быть установлен требуемый вспомогательный крутящий момент, соответствующий осевому усилию передних колес, как описано выше.
[0052] В частности, если устройство изменения угла отклонения, объектом управления которого являются задние колеса, используется как основная система, связанная со следованием по заданному маршруту движения, то реактивный крутящий момент, подлежащий нейтрализации применением вспомогательного крутящего момента или подобного ему, из вспомогательного устройства для крутящего момента рулевого управления, не включает компоненты, вызванные перемещением вспомогательного устройства для крутящего момента рулевого управления и выходного вала рулевого управления, описанные выше. Таким образом, установка требуемого вспомогательного крутящего момента может быть выполнена сравнительно легко. Однако передние колеса и задние колеса имеют противоположные направления действия осевого усилия по отношению к направлению, указываемому углом отклонения. Таким образом, в этом аспекте, требуемый вспомогательный крутящий момент устанавливается так, чтобы прикладывать вспомогательный крутящий момент, имеющий знак, отличный от угла отклонения (т.е. таким образом, что вспомогательный крутящий момент действует в направлении влево или против часовой стрелки (вправо или по часовой стрелке) при направлении вращения рулевого управления вправо (влево)).
[0053] Работа и другие преимущества настоящего изобретения станут более понятными из примеров осуществления, поясненных ниже.
Краткое описание чертежей
[0054]
[Фиг.1] Фиг.1 - схема конфигурации, концептуально показывающая структуру автомобиля по первому варианту настоящего изобретения.
[Фиг.2] Фиг.2 - блок-схема, показывающая контроль положения автомобиля относительно дорожной разметки (LKA), выполняемый в автомобиле по фиг.1 в первом варианте осуществления.
[Фиг.3] Фиг.3 - схематичный график, показывающий взаимосвязь между требуемым поперечным ускорением GYTG и требуемым базовым углом - θLKB системы контроля положения автомобиля относительно дорожной разметки (LKA) по первому варианту осуществления.
[Фиг.4] Фиг.4 - схематичный график, показывающий взаимосвязь между кривизной R и согласующим коэффициентом усиления К2 по первому варианту осуществления.
[Фиг.5] Фиг.5 - блок-схема, показывающая управление электрическим усилителем рулевого управления «EPS», по первому примеру осуществления.
[Фиг.6] Фиг.6 - схематичный график, показывающий взаимосвязь между требуемым базовым крутящим моментом от блока EPS - TBASE и крутящим моментом рулевого управления от водителя МТ, по первому примеру осуществлении изобретения.
[Фиг.7] Фиг.7 - блок-схема, показывающая управление устройством приведения в действие рулевого управления с переменным передаточным числом «VGRS» по первому примеру осуществления.
[Фиг.8] Фиг.8 - схематичный график, показывающий взаимосвязь между коэффициентом передачи рулевого управления К1 и скоростью автомобиля V по первому примеру осуществления.
[Фиг.9] Фиг.9 - блок-схема, показывающая управление системой LKA по второму примеру осуществления настоящего изобретения.
[Фиг.10] Фиг.10 - схематичный график, показывающий взаимосвязь между требуемым углом отклонения передних колес θLKA_FR для LKA и требуемым поперечным ускорением GYTG по второму примеру осуществления.
[Фиг.11] Фиг.11 - блок-схема, показывающая управление системой VGRS по второму примеру осуществления.
[Фиг.12] Фиг.12 - схематичный график, показывающий взаимосвязь между крутящим моментом Т1 для коррекции инерции и угловым ускорением управляемых колес по второму примеру осуществлению.
[Фиг.13] Фиг.13 - схематичный график, показывающий взаимосвязь между крутящим моментом Т2 для коррекции вязкости и угловой скоростью управляемых колес по второму примеру осуществления.
[Фиг.14] Фиг.14 - схематичный график, показывающий взаимосвязь между крутящим моментом Т3 для коррекции трения и угловым ускорением управляемых колес по второму примеру осуществления.
[Фиг.15] Фиг.15 - схематичный график, показывающий взаимосвязь между крутящим моментом Т4 для коррекции осевого усилия и значением коррекции требуемого угла отклонения передних колес θfLKA_FR для LKA по второму примеру осуществления.
[Фиг.16] Фиг.16 - схема конфигурации, концептуально показывающая базовую конструкцию автомобиля 30 по третьему примеру осуществления настоящего изобретения.
[Фиг.17] Фиг.17 - блок-схема, показывающая управление системой LKA по третьему примеру осуществления.
[Фиг.18] Фиг.18 - схематичный график, показывающий взаимосвязь между требуемым углом отклонения задних колес θLKA_RR для LKA и требуемым поперечным ускорением GYTG по третьему примеру осуществления.
[Фиг.19] Фиг.19 - схематичный график, показывающий взаимосвязь между крутящим моментом Т5 для коррекции осевого усилия и значением коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA по третьему примеру осуществления.
Описание условных обозначений
[0055]
FL, FR колеса (FL - переднее левое, FR - переднее правое),
10 автомобиль,
11 рулевое колесо,
12 верхний вал рулевого управления,
13 задний вал рулевого управления,
14 ведущая шестерня,
16 датчик крутящего момента рулевого управления «МТ»,
17 датчик угла поворота рулевого управления «МА»,
18 датчик угла поворота,
100 блок электронного управления «ECU»,
200 исполнительный механизм с переменным передаточным числом «VGR»,
300 устройство приведения в действие рулевого управления с переменным передаточным числом «VGRS»,
400 исполнительный механизм электрического усилителя рулевого управления «EPS»,
500 устройство приведения в действие электрического усилителя рулевого управления «EPS»,
Лучший пример осуществления изобретения
[0056]
Здесь и далее со ссылкой на чертежи описаны различные варианты вспомогательного устройства при вождении автомобиля по настоящему изобретению.
<Первый пример осуществления>
<Конструкция первого примера осуществления>
Во-первых, схема автомобиля 10 по первому варианту настоящего изобретения описывается со ссылкой на фиг.1. На фиг.1 показана схема конфигурации, концептуально показывающая конструкцию автомобиля 10.
[0057] На фиг.1 автомобиль 10 оснащен парой передних колес FL и FR (переднее левое и переднее правое) на обеих сторонах в качестве управляемых колес, и он сконструирован таким образом, чтобы двигаться в желаемом направлении с помощью рулевого управления передними колесами. Автомобиль 10 оснащен вычислительным блоком ECU 100, исполнительным механизмом 200 рулевого управления с переменным передаточным числом «VGRS», устройством 300 приведения в действие рулевого управления с переменным передаточным числом «VGRS», исполнительным механизмом 400 электрического усилителя рулевого управления «EPS» и устройством 500 приведения в действие электрического усилителя рулевого управления «EPS».
[0058] Блок ECU 100 оснащен CPU (Центральный процессорный блок), ROM (Постоянное запоминающее устройство - ПЗУ), RAM (оперативное запоминающее устройство - ОЗУ), которые не показаны на чертеже, и он является электронным управляющим блоком, способным управлять всей работой автомобиля 10. Блок ECU 100 является одним из примеров "вспомогательного устройства для вождения автомобиля" по настоящему изобретению. Блок ECU 100 сконструирован таким образом, чтобы выполнять управление каждым из устройств системы LKA, EPS и VGRS, которые описаны ниже, в соответствии с программой управления, хранимой в ПЗУ.
[0059] В частности, ECU 100 является унифицированным или моноблочным электронным управляющим блоком, выполненным, чтобы функционировать в качестве единого образца любого устройства: «первого задающего устройства», «первого управляющего устройства», «второго задающего устройства» и «второго управляющего устройства» по настоящему изобретению. Вся работа каждого из устройств выполняется блоком ECU 100. Однако физическая, механическая и электрическая конфигурация каждого из устройств по настоящему изобретению не ограничена этим, и каждое из устройств может быть выполнено в виде разных компьютерных систем, таких как множество электронных управляющих блоков ECU, разных процессорных блоков, разных контроллеров или микрокомпьютерных устройств.
[0060] В автомобиле 10 ввод рулевого управления, выполняемый водителем, через рулевое колесо 11 передается на верхний вал 12 рулевого управления, представляющий собой вал, который соосно с возможностью вращения соединен с рулевым колесом 11, и способен вращаться в том же направлении, что и рулевое колесо 11. Верхний вал 12 рулевого управления является одним из примеров «входного вала рулевого управления» по настоящему изобретению. Верхний вал рулевого управления 12 выходным концом на нижней стороне вала соединен с исполнительным механизмом 200 системы VGRS.
[0061] Исполнительный механизм 200 системы VGRS является одним из образцов "устройства изменения угла поворота" по настоящему изобретению, который оснащен корпусом 201, электродвигателем 202 VGRS2 и механизмом зубчатой передачи 203.
[0062] Корпус 201 является корпусом исполнительного механизма 200 системы VGRS для размещения электродвигателя 202 системы VGRS и механизма зубчатой передачи 203. Вышеупомянутый выходной конец на нижней стороне верхнего вала 12 рулевого управления зафиксирован на корпусе 201, и корпус 201 может вращаться с верхним валом 12 рулевого управления.
[0063] Электродвигатель 202 системы VGRS является бесщеточным электродвигателем постоянного тока, имеющим ротор 202а в качестве вращающейся детали, статор 202b в качестве неподвижной части, и вращающийся вал 202с в качестве выходного вала приводного усилия. Статор 202b зафиксирован внутри корпуса 201, а ротор 202а с возможностью вращения удерживается внутри корпуса 201. Вращающийся вал 202с соосно с возможностью вращения зафиксирован на роторе 202а, а его конец с нижней стороны соединен с механизмом зубчатой передачи 203.
[0064] Механизм зубчатой передачи 203 является механизмом планетарной передачи, имеющим множество вращающихся элементов, которые могут выполнять дифференциальное вращение (солнечная шестерня, водило и эпициклическое зубчатое колесо). Из этого множества вращающихся элементов солнечная шестерня, как первый вращающийся элемент, соединена с вращающимся валом 202с электродвигателя 202 системы VGRS, а водило, как второй вращающийся элемент, соединено с корпусом 201. Кроме того, эпициклическое зубчатое колесо, как третий вращающийся элемент, соединено с нижним валом 13 рулевого управления, как одним из образцов «выходного вала рулевого управления» по настоящему изобретению.
[0065] В соответствии с механизмом зубчатой передачи 203, имеющим такую конструкцию, скорость вращения верхнего вала 12 рулевого управления в соответствии с величиной воздействия рулевого колеса 11 (т.е. со скоростью поворота корпуса 201, соединенного с водилом) и скорость вращения электродвигателя 202 системы VGRS (т.е. скорость вращения вращающегося вала 202с, соединенного с солнечной шестерней) однозначно определяют скорость вращения нижнего вала 13 рулевого управления, соединенного с эпициклической шестерней, как с единственным оставшимся вращающимся элементом. В то же время, есть возможность выполнить управление увеличением/уменьшением скорости вращения нижнего вала 13 рулевого управления, путем выполнения управления увеличением/уменьшением скорости вращения электродвигателя 202 системы VGRS с использованием дифференциального действия вращающихся элементов. Другими словами, верхний вал 12 рулевого управления и нижний вал 13 рулевого управления могут выполнять относительный поворот путем воздействия электродвигателя 202 системы VGRS и механизма зубчатой передачи 203. Кроме того, в силу конструкции каждого вращающегося элемента в механизме зубчатой передачи 203 скорость вращения электродвигателя 202 VGRS передается на нижний вал 13 рулевого управления в режиме, что она уменьшается в соответствии с заранее определенным передаточным отношением, определенном в соответствии с коэффициентом передачи между вращающимися элементами.
[0066] Как описано выше, в автомобиле 10, в силу того факта, что верхний вал 12 рулевого управления и нижний вал 13 рулевого управления могут выполнять относительный поворот, передаточное отношение рулевого управления может непрерывно варьироваться в заранее заданном диапазоне, в котором передаточное отношение рулевого управления является отношением между углом поворота рулевого управления МА, как величиной поворота верхнего вала 12 рулевого управления 12, и углом поворота θst передних колес, как управляемых колес, который однозначно определяется в соответствии с величиной поворота нижнего вала 13 рулевого управления (это также относится к передаточному отношению механизма реечной передачи, описанного ниже).
[0067] В этой связи, механизм зубчатой передачи 204 может представлять собой не только механизм планетарной передачи, показанный здесь, но также и другой тип передачи (например, тип, в котором шестерни, каждая из которых имеет разное количество зубцов, соединены с верхним валом 12 рулевого управления и нижним валом 13 рулевого управления; в котором гибкая связь, находящаяся в контакте с каждой из шестерен, устанавливается в одной части, и в котором гибкая связь вращается крутящим моментом, передаваемым через волновой генератор, поворачивая таким образом верхний вал 12 рулевого управления и нижний вал 13 рулевого управления относительно друг друга). В альтернативном варианте, механизм зубчатой передачи может иметь физический, механический или механистический вид, отличающийся от вышеописанного аспекта, в том числе в механизме планетарной передачи.
[0068] Устройство 300 приведения в действие рулевого управления с переменным передаточным числом «VGRS» является схемой электропривода, включающей схему широтно-импульсного модулятора «PWM», транзисторную схему, инвертер и т.п., способную снабжать электричеством статор 202b электродвигателя 202 VGRS. Устройство 300 приведения в действие VGRS электрически соединено с не показанной на рисунке батареей, и может подавать напряжение возбуждения на электродвигатель 202 системы VGRS путем использования электроэнергии, поданной с батареи. Кроме того, устройство 300 приведения в действие VGRS электрически соединено с блоком ECU 100, и его работа контролируется блоком ECU 100. В связи с этим, устройство 300 приведения в действие VGRS и электродвигатель 202 VGRS составляют один образец "устройства изменения угла поворота колес» по настоящему изобретению.
[0069] Вращение нижнего вала 13 рулевого управления передается на механизм реечной передачи. Механизм реечной передачи является механизмом передачи усилия рулевого управления, включающим: ведущую шестерню 14, соединенную с выходной кромкой нижнего вала 13 рулевого управления 13; и рейку 15, в которой выполнены зубья, которые сцепляются с зубцами ведущей шестерни 14. На фиг.1, путем преобразования вращения ведущей шестерни 14 в горизонтальное перемещение рейки 15 усилие рулевого управления передается на каждое из управляемых колес через рулевые тяги и шарниры (цифровые обозначения которых опущены), соединенные с обоими концами рейки 15. Другими словами, в автомобиле 10 реализован так называемый способ рулевого управления с рейкой и шестерней.
[0070] Исполнительный механизм 400 системы EPS является одним из образцов "вспомогательного устройства для крутящего момента рулевого управления" по настоящему изобретению, оснащенного электродвигателем EPS в виде бесщеточного электродвигателя постоянного тока, включающего не показанный на рисунке ротор, в качестве вращающейся детали, к которому присоединен постоянный магнит, и статор, в качестве неподвижной детали, окружающий ротор. Электродвигатель системы EPS может генерировать вспомогательный крутящий момент «ТА» в направлении вращения ротора, вращаемого воздействием вращающегося магнитного поля, формируемого в электродвигателе системы EPS при подаче электропитания на статор через устройство 500 приведения в действие электрического усилителя рулевого управления «EPS».
[0071] С другой стороны, не показанная на рисунке зубчатая передача закрепляется на валу электродвигателя в качестве поворачивающего вала электродвигателя EPS, и эта зубчатая передача также сцепляется с ведущей шестерней 14. Таким образом, вспомогательный крутящий момент ТА, приходящий из электродвигателя системы EPS, действует в качестве вспомогательного крутящего момента для содействия вращению ведущей шестерни 14. Ведущая шестерня 14 соединена с нижним валом 13 рулевого управления, как описано выше, и нижний вал 13 рулевого управления соединен с верхним валом 12 рулевого управления через исполнительный механизм 200 системы VGRS. Таким образом, крутящий момент рулевого управления от водителя МТ, приложенный к верхнему валу 12 рулевого управления, передается на зубчатую рейку 15 таким образом, что ему, по необходимости, помогает вспомогательный крутящий момент ТА, с помощью чего снижается нагрузка на рулевое управление водителем.
[0072] Устройство 500 приведения в действие EPS является схемой электропривода, включающей схему широтно-импульсного модулятора «PWM», транзисторную схему, инвертор и т.п., способную снабжать электричеством статор электродвигателя системы EPS. Устройство 500 приведения в действие EPS электрически соединено с не показанной на рисунке батареей, и может подавать напряжение возбуждения на электродвигатель системы EPS путем использования электроэнергии, поданной с батареи. Кроме того, устройство 500 приведения в действие EPS электрически соединено с блоком ECU 100, и его работа контролируется блоком ECU 100. В связи с этим, устройство 500 приведения в действие EPS и приводное устройство 400 системы EPS составляют один образец "вспомогательного устройства для крутящего момента рулевого управления» по настоящему изобретению.
[0073] В связи с этим, тип "устройства для приложения усилия рулевого управления" по настоящему изобретению не ограничен видом, описанным здесь. Например, вспомогательный момент ТА, приходящий из электродвигателя системы EPS, может быть передан напрямую на нижний вал 13 рулевого управления со снижением скорости вращения не показанной на рисунке зубчатой передачей, или может быть применен как усилие для содействия возвратно-поступательному перемещению зубчатой рейки 16а. Другими словами, пока вспомогательный крутящий момент ТА, выдаваемый приводом 400 системы EPS не перестанет использоваться в качестве, по меньшей мере, какой-то части усилия рулевого управления для управления каждым из управляемых колес, конкретная конструкция вспомогательного устройства для крутящего момента рулевого управления по настоящему изобретению, фактически ничем не ограничивается.
[0074] С другой стороны, автомобиль 10 обеспечивается с различными датчиками, включающими датчик 16 крутящего момента рулевого управления, датчик 17 угла рулевого управления и датчик 18 поворота.
[0075] Датчик 16 крутящего момента рулевого управления является датчиком, способным обнаруживать крутящий момент МТ рулевого управления от водителя, подаваемый через рулевое колесо 11 водителем. Если объяснить это более конкретно, верхний вал 12 рулевого управления 12 имеет такую конструкцию, что он разделен на верхнюю и нижнюю части, и части соединены между собой не показанным на рисунке торсионным стержнем. К обоим концам на верхней стороне и на нижней стороне торсионного стержня присоединены кольца для обнаружения разницы угла поворота. Торсионный стержень скручивается в направлении его поворота в соответствии с крутящим моментом рулевого управления (т.е. крутящим моментом МТ рулевого управления от водителя), переданным через верхнюю часть верхнего вала 12 рулевого управления, когда водитель автомобиля 10 управляет рулевым колесом 11. Таким образом, при передаче крутящего момента рулевого управления имеется разница в угле поворота между кольцами для обнаружения разницы угла поворота. Датчик 16 крутящего момента рулевого управления может обнаруживать разницу угла поворота, преобразовать разницу угла поворота в крутящий момент рулевого управления и выдавать его в виде электрического сигнала, соответствующего крутящему моменту МТ рулевого управления. Кроме того, датчик 16 крутящего момента рулевого управления электрически соединен с блоком ECU 100, и обнаруженный крутящий момент МТ рулевого управления передается на рассмотрение блоком ECU 100 с фиксированным периодом или иррегулярно.
[0076] Датчик 17 угла рулевого управления является датчиком угла, способным обнаруживать угол МА рулевого управления, который показывает величину поворота верхнего вала 12 рулевого управления. Датчик 17 угла рулевого управления электрически соединен с блоком ECU 100, и обнаруженный угол МА рулевого управления передается на рассмотрение блоком ECU 100 с фиксированным периодом или иррегулярно.
[0077] Датчик поворота 18 является устройством кодирования по углу поворота, способным обнаруживать разницу угла поворота Δθ между корпусом 201 в исполнительном механизме 200 системы VGRS (т.е. который является эквивалентом верхнему валу 12 рулевого управления в плане угла поворота) и нижним валом 13 рулевого управления. Датчик поворота 18 электрически соединен с блоком ECU 100, и обнаруженная разница угла поворота Δθ передается на рассмотрение блоком ECU 100 с фиксированным периодом или иррегулярно.
[0078] Датчик 19 скорости автомобиля 19 является датчиком, способным определять скорость автомобиля V как скорость движения автомобиля 10. Датчик 19 скорости автомобиля электрически соединен с блоком ECU 100, и обнаруженная скорость автомобиля V передается на рассмотрение блоком ECU 100 с фиксированным периодом или иррегулярно.
[0079] Автомобильная камера 20 автомобиля является передающей камерой, которая расположена на передней части автомобиля 10, и может формировать изображение заранее определенной области перед автомобилем 10. Автомобильная камера 20 электрически соединена с блоком ECU 100, и созданное изображение области впереди автомобиля посылается в блок ECU 100 в виде видеоданных с фиксированным периодом или иррегулярно. Блок ECU 100 может анализировать видеоданные и получать различные данные, необходимые для управления системой контроля положения автомобиля относительно дорожной разметки «LKA», описанного ниже.
[0080] <Работа данного варианта изобретения>
Здесь и далее, со ссылкой по необходимости на чертежи, будет описана работа этого примера осуществления изобретения.
[0081] Во-первых, подробное объяснение со ссылкой на фиг.2 будет дано для управления системой контроля положения автомобиля относительно дорожной разметки «LKA», выполняемого блоком ECU 100. Фиг.2 показывает блок-схему управления системой LKA. В связи с этим, управление системой LKA является управлением, чтобы заставить автомобиль 10 следовать заданным маршрутом движения (по дорожной полосе) и для реализации одной из частей вспомогательной системы для вождения автомобиля, имеющейся в автомобиле 10.
[0082] Как показано на фиг.2, блок ECU 100 считывает различные сигналы, включая сигналы датчиков, связанные с вышеназванными различными датчиками, различные индикаторы (флаги) и рабочие сигналы для управления различными переключателями и т.п., предусмотренными для автомобиля 10 (шаг S101), и решает, выбран или нет режим контроля положения автомобиля относительно дорожной разметки (далее режим LKA), как итог действий водителя или задействования кнопки для инициации управления режимом LKA, расположенной внутри автомобиля 10 (шаг S102). Если режим LKA не выбран (шаг S102: NO), блок ECU 100 возвращает процесс к шагу S101.
[0083] Если выбран режим LKA (шаг S102: YES), блок ECU 100 решает, имеется ли белая линия (не обязательно являющаяся белой) для определения заданного маршрута движения системой LKA на основе видеоданных, передаваемых с автомобильной камеры 20 автомобиля (шаг S103). Если белая линия не обнаружена (шаг S103: NO), блок ECU 100 возвращается к процессу по шагу S101, поскольку заданный маршрут движения не может быть определен. С другой стороны, если белая линия обнаружена (шаг S103: YES), блок ECU 100 рассчитывает различную информацию о поверхности дороги, необходимую, когда автомобиль 10 заставляют следовать заданным маршрутом движения (шаг S104).
[0084] На шаге S104 рассчитывают кривизну R заданного маршрута движения (т.е. инверсию радиуса), боковое отклонение Y между белой линией и автомобилем 10, и отклонение угла рыскания φ между белой линией и автомобилем 10. В связи с этим различные аспекты, включая известный алгоритм узнавания изображения, могут применяться в отношении расчета информации, требуемой для управления следованием заданным маршрутом движения этого типа, и это имеет слабую корреляцию с основной частью настоящего изобретения. Поэтому аспекты расчета не упоминаются.
[0085] При расчете различной информации о поверхности дороги блок ECU 100 рассчитывает требуемое поперечное ускорение GYTG, необходимое, чтобы заставить автомобиль 10 следовать заданным маршрутом движения (шаг S105). В этой связи требуемое поперечное ускорение GYTG также может быть рассчитано в соответствии с различными известными алгоритмами или арифметическими уравнениями. В качестве альтернативы блок ECU 100 может рассчитать требуемое поперечное ускорение GYTG путем сохранения таблицы требуемых поперечных ускорений, которая использует кривизну R, боковое отклонение Y и отклонение угла рыскания φ, описанные выше, в надлежащем устройстве хранения, таком как ПЗУ, заранее, и путем выбора при необходимости подходящего значения (при этом этот тип выбора также является одним из аспектов расчета).
[0086] Если рассчитывается требуемое поперечное ускорение GYTG, процесс разделяется между двумя системами Другими словами, в одном процессе блок ECU 100 рассчитывает требуемый вспомогательный крутящий момент TLK системы LKA (шаг S105) и сохраняет рассчитанный требуемый вспомогательный крутящий момент TLK системы LKA в надлежащем перезаписываемом устройстве хранения, таком как флэш-память или оперативное запоминающее устройство - ОЗУ «RAM» (шаг S107). Требуемый вспомогательный крутящий момент TLK системы LKA определяется по таблице требуемых вспомогательных крутящих моментов системы LKA, которая использует требуемое поперечное ускорение GYTG и скорость автомобиля V, заранее хранящиеся в оперативной памяти, и блок ECU 100 рассчитывает требуемый вспомогательный крутящий момент TLK системы LKA выбором надлежащего цифрового значения из таблицы. В этой связи требуемый вспомогательный крутящий момент TLK системы LKA является одним образцом "первого целевого контрольного значения" по настоящему изобретению и одним образцом " требуемого вспомогательного крутящего момента".
[0087] Кроме того, в другом процессе блок ECU 100 рассчитывает требуемый базовый угол θLKB системы LKA на основе требуемого поперечного ускорения GYTG (шаг S108), а затем рассчитывает согласующий коэффициент усиления К2 на основе кривизны R (шаг S109). Кроме того, блок ECU 100 рассчитывает угол коррекции θLK системы LKA в соответствии с приведенным далее уравнением (1) (шаг S110). В связи с этим требуемый угол коррекции θLK системы LKA является одним образцом "второго целевого контрольного значения" по настоящему изобретению и одним образцом "требуемого угла относительного поворота" по настоящему изобретению. При расчете требуемого угла коррекции θLK системы LKA блок ECU 100 сохраняет требуемый угол коррекции θLK в устройстве хранения, таком как оперативное запоминающее устройство - ОЗУ «RAM» или флэш-память (шаг S111).
[0088] 
Далее, со ссылкой на фиг.3, дается разъяснение соотношения между требуемым поперечным ускорением GYTG и требуемым базовым углом θLKB системы LKA. На фиг.3 представлен схематичный график, показывающий соотношение между требуемым поперечным ускорением GYTG и требуемым базовым углом θLKB системы LKA.
[0089] На фиг.3 вертикальная ось показывает требуемый базовый угол θLKB системы LKA, а горизонтальная ось показывает требуемое поперечное ускорение GYTG. В данном случае область на левой стороне от исходной линии, соответствующей требуемому поперечному ускорению GYTG=0, обозначает требуемое поперечное ускорение, соответствующее направлению автомобиля налево, а область на правой стороне обозначает поперечное ускорение, соответствующее направлению автомобиля направо. Кроме того, область на верхней стороне от исходной линии, соответствующей требуемому базовому углу θLKB=0 системы LKA, соответствует углу отклонения в направлении автомобиля направо, а область с нижней стороны соответствует углу отклонения руля в направлении автомобиля налево. Таким образом, требуемый базовый угол θLKB системы LKA имеет симметричную характеристику относительно исходной линии. Требуемый базовый угол θLKB имеет такую характеристику, что его абсолютное значение линейно увеличивается относительно требуемого поперечного ускорения GYTG, за исключением зоны нечувствительности возле требуемого поперечного ускорения GYTG=0.
[0090] С другой стороны, фиг.3 показывает жирными линиями характеристики требуемого базового угла θLKB системы LKA относительно трех скоростей V автомобиля, которые представляют собой скорость автомобиля V=V1, V2 (V2>V1) и V3 (V3>V2), показанные соответственно штрихпунктирной линией, пунктирной линией и сплошной линией. Как видно из фиг.3, с увеличением скорости автомобиля требуемый базовый угол θLKB системы LKA смещается в меньшую сторону. Это потому, что степень поперечного ускорения, формируемого по отношению к углу отклонения увеличивается с увеличением скорости автомобиля. Эта операция по установке является одним образцом операции "установка требуемого угла относительного поворота так, чтобы уменьшить величину уменьшения угла рулевого управления с увеличением скорости автомобиля" в соответствии с настоящим изобретением.
[0091] В этой связи, ПЗУ блока ECU 100 сохраняет таблицу требуемых базовых углов системы LKA, которая заранее количественно определяет соотношение, показанное на фиг.3 (конечно, скорость автомобиля V, как значение параметра, лучше), и надлежащее значение выбирают из таблицы требуемых базовых углов системы LKA на шаге S108.
[0092] Далее, со ссылкой на фиг.4 будет объяснена взаимосвязь между кривизной R и согласующим коэффициентом усиления K2. На фиг.4 представлен схематичный график, показывающий соотношение между кривизной R и согласующим коэффициентом усиления K2.
[0093] На фиг.4 вертикальная ось показывает согласующий коэффициент усиления K2, а горизонтальная ось показывает кривизну R заданного маршрута движения. Таким образом, на Фиг.4 заданный маршрут движения внезапно искривляется (т.е. крутой поворот) с движением на правую сторону. Как показано на фиг.4, согласующий коэффициент усиления K2 задается в области меньше 1, и устанавливается на уменьшение его значения при увеличении кривизны R (т.е. с более крутым поворотом). Это потому, что рулевое управление рулевым колесом 11 обеспечивается (с точки зрения водителя ощущение дискомфорта не вызывается) с увеличением кривизны. Эта операция установки является одним примером операции "задание требуемого угла относительного поворота для того, чтобы уменьшить величину уменьшения угла поворота с увеличением кривизны заданного маршрута движения" по настоящему изобретению.
[0094] В этой связи, ПЗУ блока ECU 100 заранее хранит таблицу согласующих коэффициентов усиления K2, которая количественно выражает соотношение, показанное на фиг.4 (конечно, скорость автомобиля V, как значение параметра, лучше), и надлежащее значение выбирается из таблицы согласующих коэффициентов усиления системы LKA на шаге S109.
[0095] Возвращаясь к фиг.2, если требуемый вспомогательный крутящий момент TLK системы LKA и требуемый угол коррекции 9LK системы LKA рассчитаны на шаге S107 и шаге S111 соответственно, то процесс возвращается к шагу S101. Управление LKA выполняется так, как описано выше. С другой стороны, реальное управление автомобилем 10, следующим заданным маршрутом движения, реализуется под контролем EPS. Далее, со ссылкой на фиг.5, подробно объяснено управление EPS. Фиг.5 представляет блок-схему, показывающую управление EPS. В связи с этим, на фиг.5, позиции, совпадающие с фиг.2, обозначены теми же цифровыми значениями, а их описание по необходимости опущено.
[0096] На фиг.5 блок ECU 100 считывает различные сигналы (шаг S101), а затем получает крутящий момент рулевого управления МТ от водителя и скорость автомобиля V (шаг S201). Затем блок ECU 100 рассчитывает требуемый базовый крутящий момент TBASE системы EPS, который является базовым значением вспомогательного крутящего момента ТА, который выдается электродвигателем EPS исполнительного механизма 400 системы EPS, на основе полученного крутящего момента рулевого управления МТ водителя и полученной скорости автомобиля V (шаг S202).
[0097] Здесь, со ссылкой на фиг.6, дается объяснение взаимосвязи между требуемым базовым крутящим моментом TBASE для EPS и крутящим моментом рулевого управления МТ водителя. Фиг.6 представляет схематичный график, показывающий соотношение между требуемым базовым крутящим моментом TBASE и крутящим моментом рулевого управления МТ от водителя.
[0098] На фиг.6, вертикальная ось показывает требуемый базовый крутящий момент TBASE для EPS, а горизонтальная ось показывает крутящий момент рулевого управления МТ от водителя. В связи с этим область на левой стороне от исходной линии, соответствующей крутящему моменту рулевого управления водителя МТ=0, соответствует работе рулевого управления при повороте автомобиля налево, а область на правой стороне соответствует работе рулевого управления при повороте автомобиля направо. Таким образом, на фиг.6 требуемый базовый угол TBASE для EPS имеет симметричную характеристику относительно исходной линии.
[0099] С другой стороны, фиг.6 показывает жирными линиями характеристики требуемого базового крутящего момента TBASE для EPS относительно трех значений скоростей автомобиля V, V=V1, V2 (V2>V1) и V3 (V3>V2) сплошной линией, пунктирной линией и штрихпунктирной линией и короткой линией соответственно. Как ясно из фиг.6, требуемый базовый крутящий момент TBASE для EPS задается с уменьшением его значения с увеличением скорости автомобиля. Это потому, что угол отклонения для получения необходимого поперечного ускорения уменьшается с увеличением скорости автомобиля. Путем увеличения усилия, необходимого для управления рулевым колесом 11 на стороне высокой скорости автомобиля (т.е. в состоянии, когда рулевое колесо чувствуется тяжелым), предотвращается излишняя работа водителя, стабилизируя таким образом поведение автомобиля 10. В этой связи, ПЗУ блока ECU 100 заранее хранит таблицу требуемых базовых крутящих моментов EPS, которая количественно выражает соотношение, показанное на фиг.6 (конечно, скорость автомобиля V, как значение параметра, лучше), и надлежащее значение выбирается из таблицы требуемых базовых крутящих моментов EPS на шаге S202.
[0100] В соответствии с фиг.5, блок ECU 100 рассчитывает итоговый крутящий момент TTG для EPS в соответствии со следующим уравнением (2), на основе требуемого базового крутящего момента TBASE, рассчитанного в шаге S202, и требуемого вспомогательного крутящего момента TLK системы LKA, предварительно рассчитанных и сохраненных (шаг S203).
[0101]

Если рассчитать итоговый требуемый крутящий момент TTG для EPS, то блок ECU 100 выполняет управление устройством 500 приведения в действие электрического усилителя рулевого управления «EPS» на основе рассчитанного итогового требуемого крутящего момента TTG для EPS, чтобы получить на выходе вспомогательный крутящий момент ТА, соответствующий итоговому требуемому крутящему моменту TTG от электродвигателя системы EPS исполнительного устройства 400 системы EPS (шаг S204). Если шаг S204 выполнен, то процесс возвращается к шагу S101.
[0102] Как описано выше, в данном примере осуществления исполнительный механизм 400 системы EPS функционирует как основная система, чтобы заставить автомобиль 10 следовать заданным маршрутом движения, и в добавление к нормальному вспомогательному крутящему моменту, соответствующему действиям водителя по рулевому управлению, выдается требуемый вспомогательный крутящий момент TLK системы LKA, чтобы заставить автомобиль 10 следовать заданным маршрутом движенния.
[0103] С другой стороны, исполнительный механизм 400 системы EPS не изменяет соотношения между углом поворота рулевого колеса 11 и углом отклонения управляемых колес. Таким образом, если заданное движение выполняется с применением вспомогательного крутящего момента от исполнительного механизма 400 системы EPS, рулевое колесо 11 управляется в соответствии с изменением угла отклонения независимо от желания водителя. Это заставляет водителя чувствовать себя некомфортно, а это с большой вероятностью может вызвать нежелательные действия по рулевому управлению со стороны водителя. Таким образом, в настоящем варианте изменение в поведении автомобиля, когда автомобиль 10 заставляют следовать заданным маршрутом движения путем применения исполнительного механизма 400 системы EPS, как описано выше, компенсируется (или корректируется) контролем системы VGRS.
[0104] Здесь, со ссылкой на фиг.7, будет подробно объяснено управление рулевым управлением с переменным передаточным числом (VGRS). Фиг.7 представляет блок-схему, показывающую управление VGRS. В связи с этим позиции, совпадающие с фиг.2, на фиг.7 имеют те же цифровые значения, а их описание по необходимости опущено.
[0105] На фиг.7, после считывания различных сигналов (шаг S101) блок ECU 100 получает скорость автомобиля V и угол поворота МА (шаг S301). Блок ECU 100 также рассчитывает требуемый базовый угол 9VG для VGRS, который является базовым значением угла относительного поворота нижнего вала 13 рулевого управления по отношению к углу поворота МА, как углу поворота верхнего вала 12 рулевого управления 12, в соответствии со следующим уравнением (3), на основе полученной скорости автомобиля V и полученного угла поворота МА (шаг S302).
[0106]

В вышеуказанном уравнении (3) К1 представляет собой передаточное отношение рулевого управления для определения угла поворота нижнего вала 13 рулевого управления по отношению к углу поворота МА, и является цифровым значением, которое может варьироваться в зависимости от скорости автомобиля V. Здесь, со ссылкой на фиг.8, буде дано объяснение взаимосвязи между передаточным отношением рулевого управления K1 и скоростью автомобиля V. Фиг.8 является схематичным графиком, показывающим взаимосвязь между передаточным отношением рулевого управления K1 и скоростью автомобиля V.
[0107] На фиг.8 соотношение передачи рулевого управления K1 равно 0 при скорости автомобиля Vth в средней области скоростей автомобиля (т.е. соотношение поворота между верхним валом 12 рулевого управления и нижним валом 13 рулевого управления составляет 1:1), превышает 0 в области малых скоростей автомобиля, меньших, чем Vth, и меньше 0 в области более высоких скоростей автомобиля. Другими словами, больший угол отклонения может быть получен меньшим углом поворота рулевого управления в области малых скоростей автомобиля. Это потому, что поперечное ускорение по отношению к углу отклонения увеличивается с увеличением скорости автомобиля, как описано выше.
[0108] В соответствии с фиг.7, блок ECU 100 далее рассчитывает итоговый требуемый угол θTGF для VGRS в соответствии со следующим уравнением (4), на основе рассчитанного требуемого базового угла θVG для VGRS и требуемого угла коррекции θLK системы LKA, предварительно рассчитанных и сохраненных (шаг S303).
[0109] 
Если рассчитать итоговый требуемый угол θTGF системы VGRS, то блок ECU 100 управляет устройством 300 приведения в действие рулевого управления с переменным передаточным числом VGRS на основе рассчитанного итогового требуемого угла θTGF системы VGRS, чтобы повернуть электродвигатель 202 VGRS исполнительного механизма VGRS на величину, соответствующую итоговому требуемому углу θTGF системы VGRS (шаг S304). Если выполнен шаг S304, процесс возвращается к шагу S101.
[0110] Как описано выше, в соответствии с управлением VGRS по настоящему примеру осуществления, требуемый угол коррекции θLK для LKA отдельно добавляется к требуемому углу обычной системы VGRS. Таким образом, есть возможность подавить изменение угла поворота МА, когда автомобиль 10 заставляют двигаться заданным маршрутом движения, с использованием предыдущего управления EPS. Таким образом, ощущение дискомфорта, доставляемое водителю, снижается, и психологическое напряжение водителя может быть снижено, посредством чего поведение автомобиля 10 может быть стабилизировано.
[0111] С другой стороны, учитывая, что изменение угла поворота МА подавляется требуемым углом коррекции θLK системы LKA, как описано выше, нет необходимости менять характеристики изменения угла поворота нижнего вала 13 рулевого управления по отношению к углу поворота МА (т.е. передаточное отношение рулевого управления K1), когда угол поворота МА уменьшается в управлении VGRS по настоящему примеру осуществления. Таким образом, нет необходимости увеличивать передаточное отношение рулевого управления K1 и снижать воздействие изменения угла отклонения руля, вызванное управлением EPS, на угол поворота рулевого управления, и такая проблема также предпочтительно решается увеличением изменения угла отклонения по отношению к рулевому управлению водителя, что вызывает, когда принимаются такие меры, дестабилизацию поведения автомобиля. Кроме того, учитывая, что изменение угла поворота рулевого управления МА может быть подавлено требуемым углом коррекции θLK системы LKA, передаточное отношение рулевого управления K1 может быть уменьшено по сравнению со случаями, когда такой тип следования заданным маршрутом движения не выполняется, таким образом далее снижая воздействие работы водителя рулевым управлением на угол отклонения во время выполнения управления системой LKA.
<Второй пример осуществления изобретения>
Далее, по второму примеру осуществления настоящего изобретения будут даны разъяснения по отличиям управления блоком LKA по отношению к первому примеру осуществления. Во-первых, со ссылкой на фиг.9, будет подробно объяснено управление блоком LKA (помощник для сохранения полосы движения) по настоящему варианту. На фиг.9 представлена блок-схема, показывающая управление LKA по второму примеру осуществления изобретения. В этой связи, на фиг.9, позиции, совпадающие с фиг.2, имеют те же цифровые условные обозначения, а их объяснение по необходимости опущено. Кроме того, конструкция автомобиля по второму варианту предполагается такой же, как и конструкция автомобиля 10 по первому варианту.
[0112] На фиг.9, если рассчитывается требуемое поперечное ускорение GYTG (шаг S105), то блок ECU 100 рассчитывает требуемый угол отклонения переднего колеса θLKA_FR для LKA, на основе рассчитанного требуемого поперечного ускорения GYTG (шаг S401). Если производится расчет LKA требуемого угла отклонения переднего колеса θLKA_FR для LKA, то блок ECU 100 сохраняет рассчитанный требуемый угол отклонения переднего колеса θLKA_FR для системы LKA в надлежащем устройстве хранения (шаг S402). В этой связи, требуемый угол отклонения переднего колеса θLKA_FR для LKA является другим примером "первого целевого контрольного значения" по настоящему изобретению.
[0113] Здесь, со ссылкой на фиг.10, будет дано объяснение взаимосвязи между требуемым углом отклонения переднего колеса θLKA_FR для LKA и требуемым поперечным ускорением GYTG. Фиг.10 представляет собой схематичный график, показывающий взаимосвязь между требуемым углом отклонения переднего колеса θLKA_FR для LKA и требуемым поперечным ускорением GYTG.
[0114] На фиг.10 требуемый угол отклонения передних колес θLKA_FR для LKA имеет одни и те же характеристики при повороте влево и при повороте вправо, и это возрастающая функция, которая в основном линейно увеличивается по отношению к требуемому поперечному ускорению GYTG, за исключением зоны нечувствительности вблизи требуемого поперечного ускорения GYTG=0.
[0115] Кроме того, фиг.10 показывает жирными линиями, в качестве одного образца, характеристики требуемого угла отклонения переднего колеса θLKA_FR для LKA по отношению к скоростям автомобиля V1, V2 (V2>V1) и V3 (V3>V2) сплошной линией, пунктирной линией и штрихпунктирной линией соответственно. Как показано на фиг.10, требуемый угол отклонения переднего колеса θLKA_FR для LKA задают меньшим с увеличением скорости автомобиля, если требуемое поперечное ускорение GYTG постоянно.
[0116] В этой связи, ПЗУ блока ECU 100 заранее сохраняет таблицу требуемых углов отклонения переднего колеса системы LKA, которая количественно выражает соотношение, показанное на фиг.10, и надлежащее значение выбирается из таблицы требуемых углов отклонения переднего колеса для LKA на шаге S401.
[0117] Здесь, со ссылкой на фиг.11, будет подробно объяснено управление VGRS по второму примеру осуществления изобретения. На фиг.11 представлена блок-схема, показывающая управление VGRS по второму примеру осуществления изобретения. В этой связи на фиг.11 позиции, совпадающие с фиг.7, имеют такие же цифровые обозначения, а их разъяснение по необходимости опущено.
[0118] На фиг.11, если производится расчет требуемого базового угла θVG для системы VGRS, то блок ECU 100 рассчитывает такой же требуемый угол коррекции θLK для LKA, как это имеет место в первом примере осуществления, на основе требуемого угла отклонения переднего колеса θLKA FR для LKA, рассчитанного и сохраненного в управлении системы LKA (шаг S501). В данном случае этот пример осуществления сконструирован так, что исполнительное устройство системы VGRS используется в качестве основной системы для того, чтобы заставить автомобиль 10 следовать заданным маршрутом движения. Поэтому необходимо преобразовать угол поворота каждого из передних колес, как управляемых колес, в требуемый угол коррекции θLK для LKA. Процесс на шаге S501 соответствует этому процессу преобразования, и требуемый угол коррекции θLK для LKA рассчитывается, как результат арифметического логического процесса (или численного процесса), основанного на передаточном отношении механизма реечной передачи.
[0119] Если рассчитывать требуемый угол коррекции θLK системы LKA на основе требуемого угла отклонения передних колес θLKA_FR системы LKA, то блок ECU 100 рассчитывает итоговый угол поворота θTGF системы VGRS (шаг S303) и приводит в действие электродвигатель 202 VGRS (шаг S304), как в первом примере осуществления изобретения. Управление системой VGRS по второму примеру осуществления изобретения выполняется, как описано выше. Таким образом, во втором примере осуществления имеется возможность заставить автомобиль 10 следовать заданным маршрутом движения с выполнением контроля угла отклонения исполнительным механизмом 200 системы VGRS.
[0120] С другой стороны, исполнительный механизм 200 системы VGRS расположен в зоне соединения между верхним валом рулевого управления и нижним валом 13 рулевого управления и не зафиксирован на автомобиле 10, в отличие от исполнительного механизма 400 системы EPS. Таким образом, если водитель пытается выполнить контроль угла отклонения в соответствии с требуемым углом коррекции θLK системы LKA, описанным выше, в состоянии «свободные руки», в котором водитель не удерживает рулевое колесо 11, то рулевое колесо 11 управляется в направлении, противоположном углу отклонения, который задается изначально, вместо поворота управляемых колес, в связи с реактивным крутящим моментом от нижнего вала 13 рулевого управления, исполнительного механизма 400 системы EPS или управляемых колес. В качестве альтернативы, даже если удерживать рулевое колесо 11, то водитель испытывает дискомфорт, как если бы водитель повернул рулевое колесо 11 в направлении, противоположном направлению поворота автомобиля 10 в связи с этой противодействующей силой. Таким образом, в этом примере осуществления, влияние реактивного крутящего момента, генерируемого при следовании заданным маршрутом движения с контролем угла отклонения, компенсируется (или корректируется) контролем системы EPS.
[0121] В соответствии с фиг.9, если осуществляется расчет требуемого угла отклонения переднего колеса θLKA_FR для LKA, то блок ECU 100 рассчитывает крутящий момент для коррекции инерции Т1 для корректирования компоненты, вызванной инерцией нижнего вала 13 рулевого управления и привода EPS 400, из этого типа реактивного крутящего момента (шаг S403). В этой связи, крутящий момент для коррекции инерции Т1 соответствует сумме "первого слагаемого коррекции инерции" и "второго слагаемого коррекции инерции" по настоящему изобретению и устанавливается на основе углового ускорения управляемых колес. В этой связи, то есть угловое ускорение управляемых колес является значением производной второго порядка угла рулевого управления, а угол рулевого управления в этом случае является требуемым углом отклонения переднего колеса LKA θLKA_FR, реализуемым управлением рулевым управлением с переменным передаточным числом «VGRS».
[0122] Кроме того, блок ECU 100 рассчитывает крутящий момент для коррекции вязкости Т2 для корректирования компоненты, вызванной вязкостью, нижнего вала 13 рулевого управления и исполнительного механизма 400 системы EPS вследствие этого типа реактивного крутящего момента (шаг S404) и рассчитывает крутящий момент коррекции трения Т3 для корректирования компоненты, вызванной трением, нижнего вала рулевого управления 13 и исполнительного механизма 400 EPS вследствие этого типа реактивного крутящего момента (шаг S405), параллельно с расчетом крутящего момента коррекции инерции Т1. В этой связи, крутящий момент коррекции вязкости Т2 соответствует сумме "первого слагаемого коррекции вязкости" и "второго слагаемого коррекции вязкости" по настоящему изобретению, и крутящий момент коррекции трения Т3 соответствует сумме "первого слагаемого коррекции трения" и "второго слагаемого коррекции трения" по настоящему изобретению. Они задаются на основе углового ускорения управляемых колес. В этой связи, угловое ускорение управляемых колес является значением производной второго порядка требуемого угла отклонения переднего колеса θLKA FR системы LKA, реализуемого управлением рулевым управлением с переменным передаточным числом «VGRS».
[0123] Кроме того, блок ECU 100 рассчитывает крутящий момент Т4 для коррекции осевого усилия для корректирования компоненты, вызванной осевым усилием от передних колес как управляемых колес, вследствие этого типа реактивного крутящего момента, параллельно с расчетом крутящего момента Т1 для коррекции инерции (шаг S406). Крутящий момент коррекции осевого усилия Т4 соответствует одному образцу «требуемого вспомогательного крутящего момента, соответствующего третьей части реактивного крутящего момента" по настоящему изобретению, и задается на основе угла управляемых колес, т.е. угла отклонения колес. В этой связи, осевое усилие от управляемых колес отличается от каждого из слагаемых, соответствующих инерции, вязкости и трению, описанных выше, и оно достигает рулевого колеса 11 после момента времени, в который управляемые колеса управляются с точки зрения конструкции автомобиля 10. Таким образом, если крутящий момент Т4 для коррекции осевого усилия не определяется ввиду такого типа движения автомобиля, крутящий момент коррекции осевого усилия Т4 будет избыточным или недостаточным для нейтрализации компоненты осевого усилия, и не сможет в необходимой степени уменьшить реактивный крутящий момент. Таким образом, когда рассчитывается крутящий момент Т4 для коррекции осевого усилия по требуемому углу отклонения передних колес θLKA_RR для LKA, то блок ECU 100 выполняет процедуру фильтрации, которая учитывает временную реакцию, рассчитывая таким образом значение для коррекции требуемого угла отклонения переднего колеса θfLKA_FR системы LKA. Крутящий момент Т4 для коррекции осевого усилия задается на основе значения коррекции требуемого угла отклонения передних колес θfLKA_FR системы LKA.
[0124] После шагов S403, S404, S405 и S406 блок ECU 100 рассчитывает требуемый вспомогательный крутящий момент TLK системы LKA в соответствии со следующим уравнением (5) (шаг S407). Управление EPS по второму примеру осуществления отличается от первого варианта только требуемым вспомогательным крутящим моментом TLK системы LKA, так что его описание опущено. В этой связи, требуемый вспомогательный крутящий момент TLK системы LKA в данном примере осуществления является еще одним образцом "второго целевого контрольного значения" по настоящему изобретению, и одним из образцов " требуемого вспомогательного крутящего момента".
[0125]

Далее, со ссылкой по необходимости на фиг.12-15 описываются соответствующие характеристики корректирующих крутящих моментов. На фиг.12 представлен схематичный график, показывающий взаимосвязь между крутящим моментом Т1 для коррекции инерции и угловым ускорением управляемых колес. На фиг.13 представлен схематичный график, показывающий взаимосвязь между крутящим моментом Т2 для коррекции вязкости и угловой скоростью управляемых колес. На фиг.14 представлен схематичный график, показывающий взаимосвязь между крутящим моментом Т3 для коррекции трения и угловым ускорением управляемых колес. На фиг.15 представлен схематичный график, показывающий взаимосвязь между крутящим моментом Т4 для коррекции осевого усилия и значением коррекции требуемого угла отклонения передних колес θfLKA_FR системы LKA.
[0126] На фиг.12 вертикальная ось показывает крутящий момент Т1 для коррекции инерции, а горизонтальная ось показывает угловое ускорение управляемых колес θLKA_FR" (в данном случае, значок " обозначает производную второго порядка). Как показано на фиг.12, крутящий момент Т1 для коррекции инерции имеет симметричную характеристику между поворотом направо и поворотом налево, и имеет такую характеристику, что он линейно возрастает в отношении θLKA_FR, за исключением зоны нечувствительности вблизи θLKA_FR"=0 и зоны насыщения.
[0127] На фиг.13 вертикальная ось показывает крутящий момент Т2 для коррекции вязкости, а горизонтальная ось показывает угловую скорость управляемых колес θLKA_FR′ (в данном случае, значок ′ обозначает производную). Как показано на фиг.13, крутящий момент Т2 для коррекции вязкости имеет симметричную характеристику между поворотом направо и поворотом налево, и имеет такую характеристику, что линейно возрастает по отношению к θLKA_FR′, за исключением зоны нечувствительности вблизи θLKA_FR′=0 и зоны насыщения.
[0128] На фиг.14 вертикальная ось показывает крутящий момент Т3 для коррекции трения, а горизонтальная ось показывает угловую скорость управляемых колес θLKA_FR′. Как показано на фиг.14, крутящий момент Т3 для коррекции трения имеет симметричную характеристику между поворотом направо и поворотом налево, и имеет такую характеристику, что он имеет постоянную величину относительно θLKA_FR′, за исключением зоны нечувствительности вблизи θLKA_FR′=0.
[0129] На фиг.15 вертикальная ось показывает крутящий момент Т4 для коррекции осевого усилия, а горизонтальная ось показывает значение для коррекции требуемого угла отклонения передних колес θfLKA_FR для LKA. Как показано на фиг.15, крутящий момент Т4 для коррекции осевого усилия имеет симметричную характеристику между поворотом направо и поворотом налево и имеет такую характеристику, которая линейно возрастает по отношению к θfLKA_FR, за исключением зоны нечувствительности вблизи θfLKA_FR=0 и зоны насыщения.
[0130] Кроме того, фиг.15 показывает жирными линиями, как один пример, характеристики крутящего момента Т4 для коррекции осевого усилия относительно скоростей автомобиля V1, V2 (V2>V1) и V3 (V3>V2) сплошной линией, пунктирной линией и штрихпунктирной линией соответственно. Как показано на фиг.15, крутящий момент Т4 для коррекции осевого усилия задается с увеличением его значения с ростом скорости автомобиля, если значение коррекции требуемого угла отклонения передних колес θfLKA_FR для LKA постоянно.
[0131] В этой связи, ПЗУ блока ECU 100 заранее хранит таблицы корректирующих крутящих моментов, которые количественно выражают соотношения, показанные на фиг.12-15, и надлежащее значение выбирается из каждой из таблиц крутящих моментов для коррекции осевого усилия во время одного из соответствующих шагов, описанных выше. Как объяснено выше, в соответствии со вторым примером осуществления, угол отклонения передних колес как управляемых колес, управляется таким образом, чтобы быть требуемым углом отклонения передних колес θLKA_FR для LKA путем выполнения управления углом отклонения с помощью исполнительного механизма 200 системы VGRS, и таким образом становится возможным предпочтительно заставить автомобиль 10 следовать заданным маршрутом движения. С другой стороны, реактивный крутящий момент, генерируемый в рулевом колесе 11 в этом типе управления углом отклонения, уменьшается и в идеале компенсируется, поскольку различные корректирующие крутящие моменты коррекции T1-Т4 выдаются исполнительным механизмом 400 системы EPS, в котором различные корректирующие крутящие моменты T1-Т4 составлены из компонент, соответствующих инерции, вязкости и трению нижнего плеча вала 13, как системы рулевого управления, компонент, соответствующих инерции, вязкости и трению исполнительного механизма 400 системы EPS, и компоненты для коррекции осевого усилия управляемых колес, которые учитывают движение автомобиля. Таким образом, водителю не обязательно удерживать рулевое колесо 11 во время периода контроля LKA, и даже при удерживании его водитель не ощущает ухудшения ощущения рулевого управления, связанного с реактивным крутящим моментом. Таким образом, это не вызывает излишней работы рулевым колесом 11 при рулевом управлении, и становится возможным поддерживать устойчивое поведение автомобиля 10.
[0132] В этой связи, в настоящем примере осуществления угол отклонения управляемых колес трактуется, как равный требуемому углу отклонения передних колес θLKA_FR для LKA, который представляет собой требуемое значение угла отклонения. Они имеют временную задержку, вызванную характеристикой исполнительного механизма 200 системы VGRS и скоростью передачи между блоком ECU 100 и другими устройствами. Ввиду временной задержки при расчете угла отклонения, когда рассчитываются различные корректирующие крутящие моменты T1-Т4, использование θLKA_FR в качестве целевого значения целесообразно и практично. Однако, если устройство оснащено датчиком угла отклонения или подобным датчиком для прямого обнаружения угла отклонения, то, конечно, вышеуказанный корректирующий крутящий момент может быть рассчитан на основе этого угла отклонения управляемых колес, и в этом случае на практике, очевидно, проблем не возникает.
<Третий пример осуществления изобретения>
Далее описывается третий пример осуществления настоящего изобретения. Во-первых, со ссылкой на фиг.16, описывается автомобиля 30 по данному варианту. На фиг.16 показана схема конфигурации, концептуально показывающая конструкцию автомобиль 30. В этой связи, на фиг.16 позиции, частично совпадающие с фиг.1, имеют те же цифровые обозначения, и их разъяснение по необходимости опущено.
[0133] на фиг.16, автомобиль 30 отличается от автомобиля 10 по первому и второму примерам осуществления тем, что автомобиль 30 не имеет исполнительного механизма 200 рулевого управления с переменным передаточным числом «VGRS», для изменения соотношения между углом рулевого управления МА рулевого колеса 11 и углом отклонения передних колес и оборудования, связанного с ним, а вместо этого автомобиль 30 оснащен системой 600 активного управления задними колесами «ARS» для обеспечения возможности рулевого управления задними колесами RL (левое заднее) и RR (правое заднее). Другими словами, в настоящем примере осуществления задние колеса выполняют функцию «управляемых колес» по настоящему изобретению. Однако передние колеса, очевидно, соединены с рулевым колесом 11, и в обычном смысле передние колеса, конечно, являются управляемыми колесами.
[0134] Система 600 ARS оснащается не показанными на рисунке главным цилиндром; и исполнительным механизмом для приложения к главному цилиндру возвратно-поступательного приводного усилия в горизонтальном направлении. Система 600 ARS может приводить в действие заднюю рулевую тягу 31, которая соединена с обоими концами главного цилиндра, в горизонтальном направлении на заранее определенную величину путем использования приводного усилия, прилагаемого исполнительным механизмом, изменяя таким образом угол отклонения задних колес. В этой связи, конструкция автомобиля для обеспечения возможности рулевого управления задними колесами может заимствовать различные известные подходы, не ограничиваясь только показанным вариантом.
[0135] В автомобиле 30 управление системой LKA выполняется блоком 100 ECU. Далее, со ссылкой на фиг.17, будет подробно объяснено управление системой контроля положения автомобиля относительно дорожной разметки «LKA» по третьему примеру осуществления. На фиг.17 представлена блок-схема, показывающая управление системой LKA по третьему примеру осуществления изобретения. В этой связи на фиг.17 позиции, совпадающие с фиг.2, имеют те же цифровые обозначения, и их объяснение по мере необходимости опущено.
[0136] На фиг.17, при расчете требуемого поперечного ускорения GYTG блок ECU 100 рассчитывает требуемый угол отклонения задних колес θLKA_RR для системы LKA на основе рассчитанного требуемого поперечного ускорения GYTG (шаг S601), и сохраняет его (шаг S602). Здесь, со ссылкой на фиг.18, будет приведено объяснение соотношения между требуемым поперечным ускорением GYTG и требуемым углом отклонения задних колес θLKA_RR. На фиг.18 представлен схематичный график, показывающий взаимосвязь между требуемым углом отклонения задних колес θLKA_RR для LKA и требуемым поперечным ускорением GYTG.
[0137] На фиг.18 требуемый угол отклонения задних колес θLKA_RR для LKA имеет одинаковую характеристику при повороте налево и при повороте направо, и эта характеристика представляет собой возрастающую функцию, которая в основном возрастает линейно от требуемого поперечного GYTG, за исключением зоны нечувствительности вблизи требуемого поперечного ускорения GYTG=0. Однако направление рулевого управления задних колес имеет обратную фазу относительно такового для передних колес, и требуемый угол отклонения задних колес θLKA RR для системы LKA устанавливают вправо или по часовой стрелке (влево или против часовой стрелки) при левом (правом) повороте, т.е противоположно требуемому углу отклонения передних колес θLKA_FR для LKA.
[0138] Кроме того, фиг.18 показывает, в качестве одного примера, жирными линиями характеристики требуемого угла отклонения задних колес θLKA_RR для LKA по отношению к скоростям автомобиля V1, V2 (V2>V1) и V3 (V3>V2) соответственно сплошной линией, пунктирной линией и штрихпунктирной линией. Как показано на фиг.18, требуемый угол отклонения задних колес θLKA_RR для LKA устанавливают, чтобы он был меньше с увеличением скорости автомобиля, если требуемое поперечное ускорение GYTG постоянно. Это потому, что поперечное ускорение по отношению к углу отклонения увеличивается с увеличением скорости автомобиля, как и в переднем рулевом управлении.
[0139] В этой связи, ПЗУ блока ECU 100 заранее сохраняет внутри таблицу требуемых углов отклонения задних колес θLKA_RR для LKA, которая количественно выражает соотношение, показанное на фиг.18, и надлежащее значение выбирают из таблицы требуемых углов отклонения задних колес LKA на шаге S601. В связи с этим, если соотношение между направлением рулевого управления задних колес и направлением рулевого управления передних колес изменяется между синфазным и в противофазе в зависимости от скорости автомобиля, можно обратиться к подбору одного из соотношений на фиг.10 и 18.
[0140] Снова о фиг.17, блок ECU 100 рассчитывает крутящий момент Т5 для коррекции осевого усилия для расчета реактивного крутящего момента, вызванного осевым усилием от задних колес на основе требуемого угла отклонения задних колес θLKA_RR для LKA (шаг S603), и устанавливает крутящий момент Т5 для коррекции осевого усилия в качестве требуемого вспомогательного крутящего момента TLK для LKA (шаг S604). В этой связи, с точки зрения конструкции автомобиля 10, осевое усилие от задних колес также достигает рулевого колеса 11 позже временной точки, в которой задние колеса управляются, как и в случае с передними колесами. Таким образом, если крутящий момент Т5 для коррекции осевого усилия не определен, с точки зрения этого типа движения автомобиля, то крутящий момент Т5 для коррекции осевого усилия окажется избыточным или недостаточным для нейтрализации компонента осевого усилия, и не сможет при необходимости в достаточной степени снизить реактивный крутящий момент. Таким образом, когда рассчитывают крутящий момент Т5 для коррекции осевого усилия по требуемому углу отклонения задних колес θLKA_RR для LKA, то блок ECU 100 выполняет процесс фильтрации, который учитывает временную реакцию, рассчитывая таким образом значение коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA. Крутящий момент Т5 для коррекции осевого усилия задают на основе значения для коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA.
[0141] Здесь, со ссылкой на фиг.19, дается объяснение взаимосвязи между крутящим моментом Т5 для коррекции осевого усилия и значением коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA. Фиг.19 является схематичным графиком, показывающим взаимосвязь между крутящим моментом Т5 для коррекции осевого усилия и значением коррекции требуемого угла отклонения задних колес θfLKA_RR. В связи с этим, на фиг.19, позиции, совпадающие с фиг.15, имеют те же цифровые обозначения, а их описание по необходимости будет опущено.
[0142] На фиг.19 вертикальная ось показывает крутящий момент Т5 для коррекции осевого усилия, а горизонтальная ось показывает значение коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA. Как показано на фиг.19, крутящий момент Т5 для коррекции осевого усилия имеет симметричную характеристику между поворотом направо и поворотом налево, и имеет такую характеристику, которая линейно возрастает по отношению к углу θfLKA_RR, за исключением зоны нечувствительности вблизи θfLKA_RR=0 и зоны насыщения. Однако, как описано выше, направление поворота задних колес противоположно направлению поворота автомобиля, а крутящий момент Т5 для коррекции осевого усилия также имеет симметричную характеристику, что и крутящий момент Т4 для коррекции осевого усилия.
[0143] Кроме того, фиг.19 показывает жирными линиями, как один образец, характеристики крутящего момента Т5 для коррекции осевого усилия относительно скоростей автомобиля V1, V2 (V2>V1) и V3 (V3>V2) сплошной линией, пунктирной линией и штрихпунктирной линией соответственно. Как показано на фиг.19, крутящий момент Т5 для коррекции осевого усилия задают с повышением его значения с увеличением скорости автомобиля, если значение коррекции требуемого угла отклонения задних колес θfLKA_RR для LKA постоянно. Это потому, что поперечное ускорение увеличивается с увеличением скорости автомобиля, если угол отклонения является постоянным.
[0144] В этой связи, ПЗУ блока ECU 100 заранее сохраняет внутри таблицу крутящего момента для коррекции осевого усилия, которая численно выражает соотношения, показанные на фиг.18, и надлежащее значение выбирается из таблицы крутящего момента для коррекции осевого усилия на шаге S603.
[0145] Как описано выше, в соответствии с третьим примером осуществления изобретения, даже если контроль угла отклонения задних колес используется для следования заданным маршрутом движения, есть возможность предпочтительно выполнить следование заданным маршрутом движения при подавлении дестабилизации поведения автомобиля нейтрализацией реактивного крутящего момента, действующего на вал рулевого управления 11.
[0146] В связи с этим, конструкции автомобиля по первому и второму вариантам и конструкция автомобиля по третьему варианту не являются несовместимыми. Например, второй вариант и третий вариант могут быть скомбинированы, при этом следование заданным маршрутом движения выполняется путем контроля угла отклонения передних и задних колес. Другими словами, в этом случае оба крутящих момента Т4 и Т5 для коррекции осевого усилия могут быть отражены в требуемом вспомогательном крутящем моменте TLK.
[0147] Настоящее изобретение не ограничено вышеописанными вариантами, но могут вноситься различные изменения, по желанию, без отхода от сущности или духа изобретения, которые могут быть взяты из формулы и всего описания. Подразумевается, что приводное вспомогательное устройство автомобиля, которое включает такие изменения, также должно попадать в пределы действия настоящего изобретения.
Промышленная применимость
[0148] Настоящее изобретение может использоваться, например, для приводного вспомогательного устройства автомобиля, чтобы заставить автомобиль двигаться по заданному маршруту.
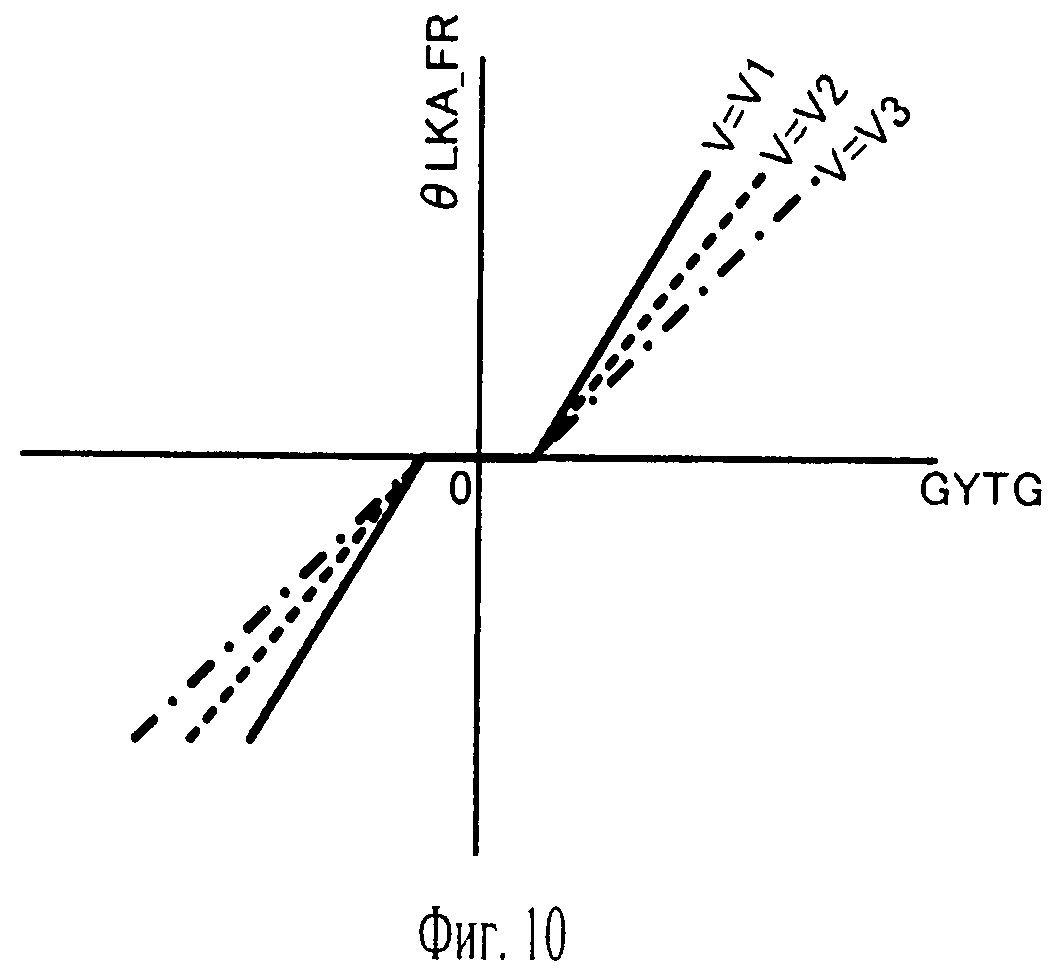
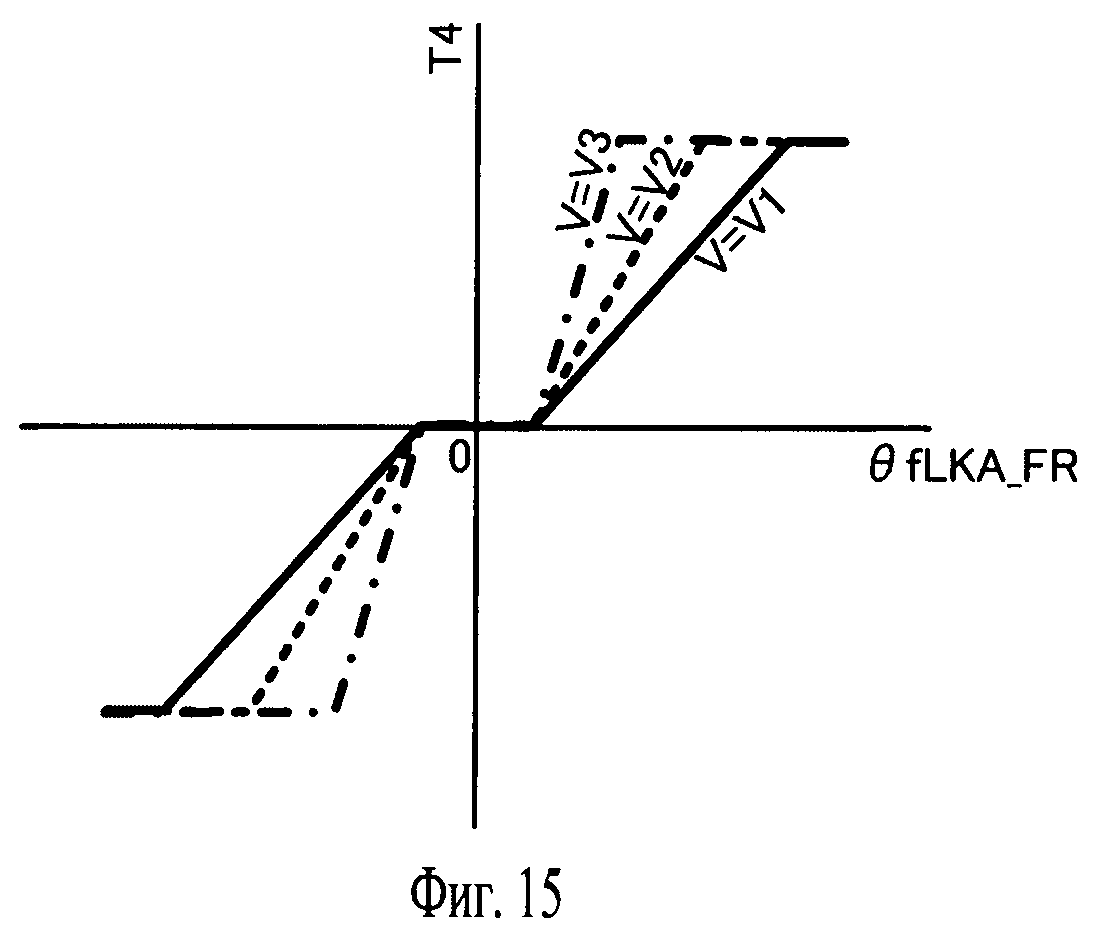
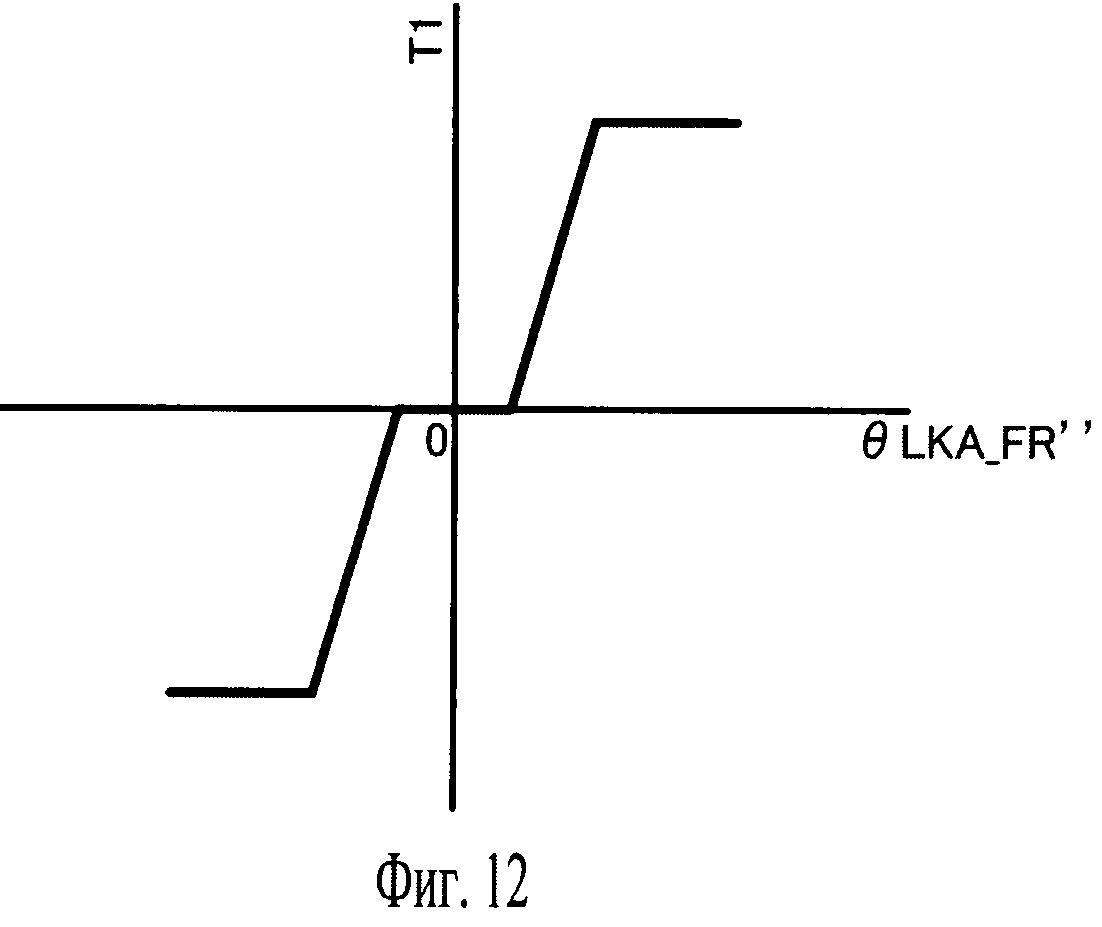
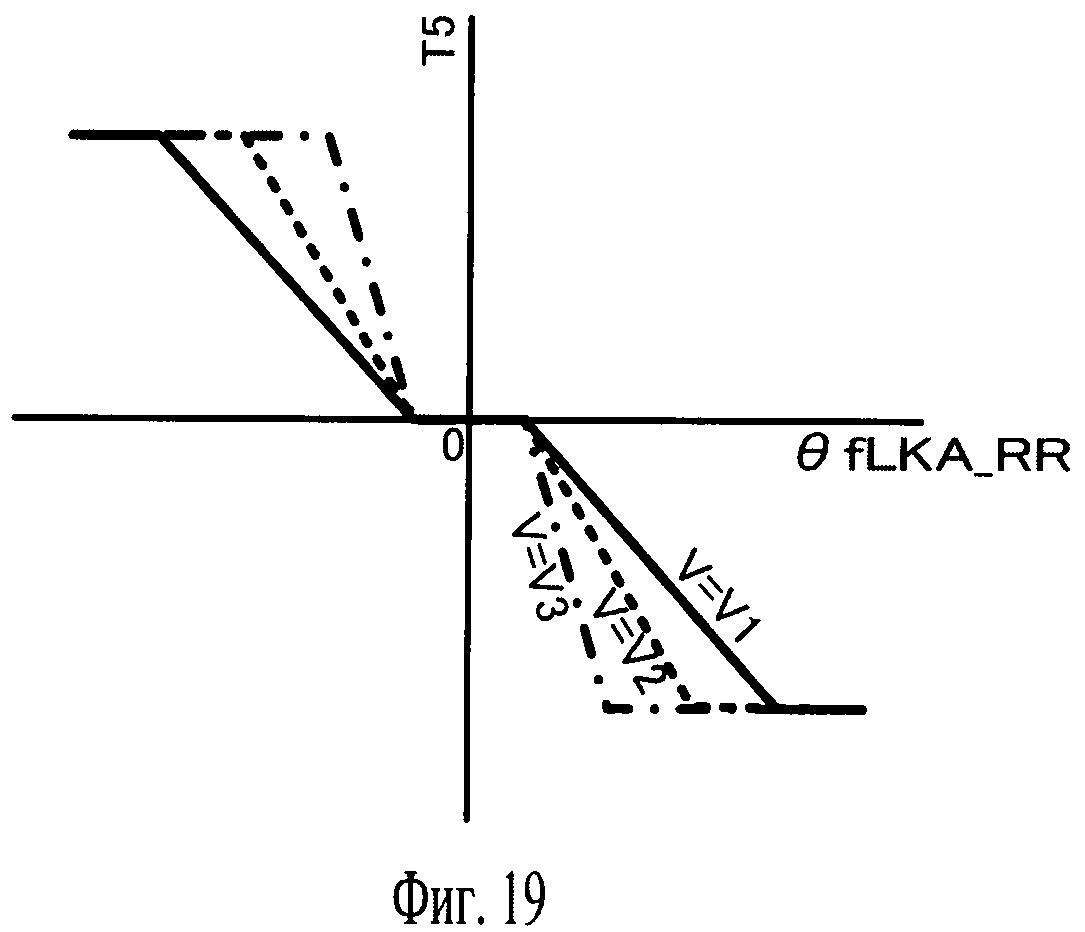
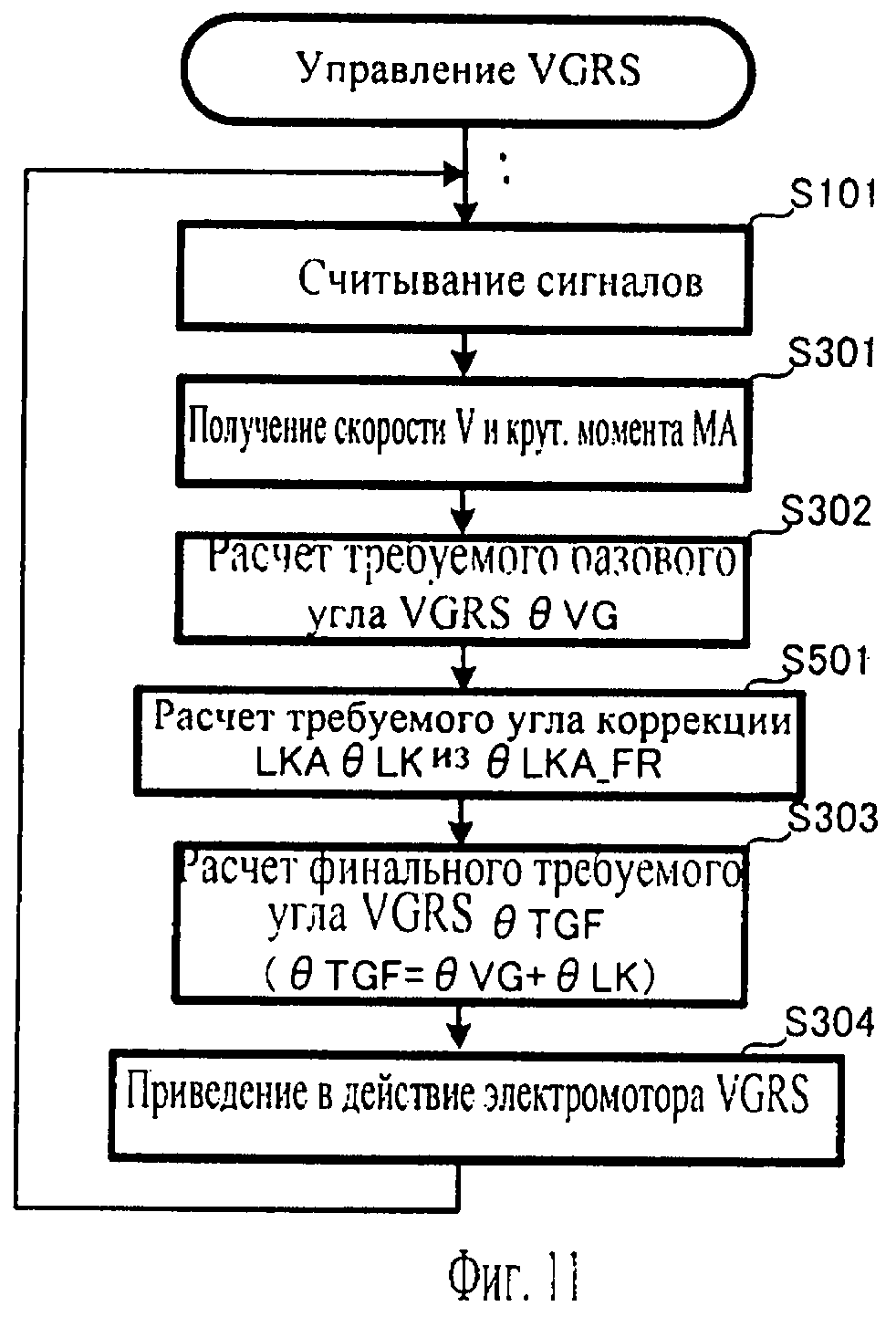
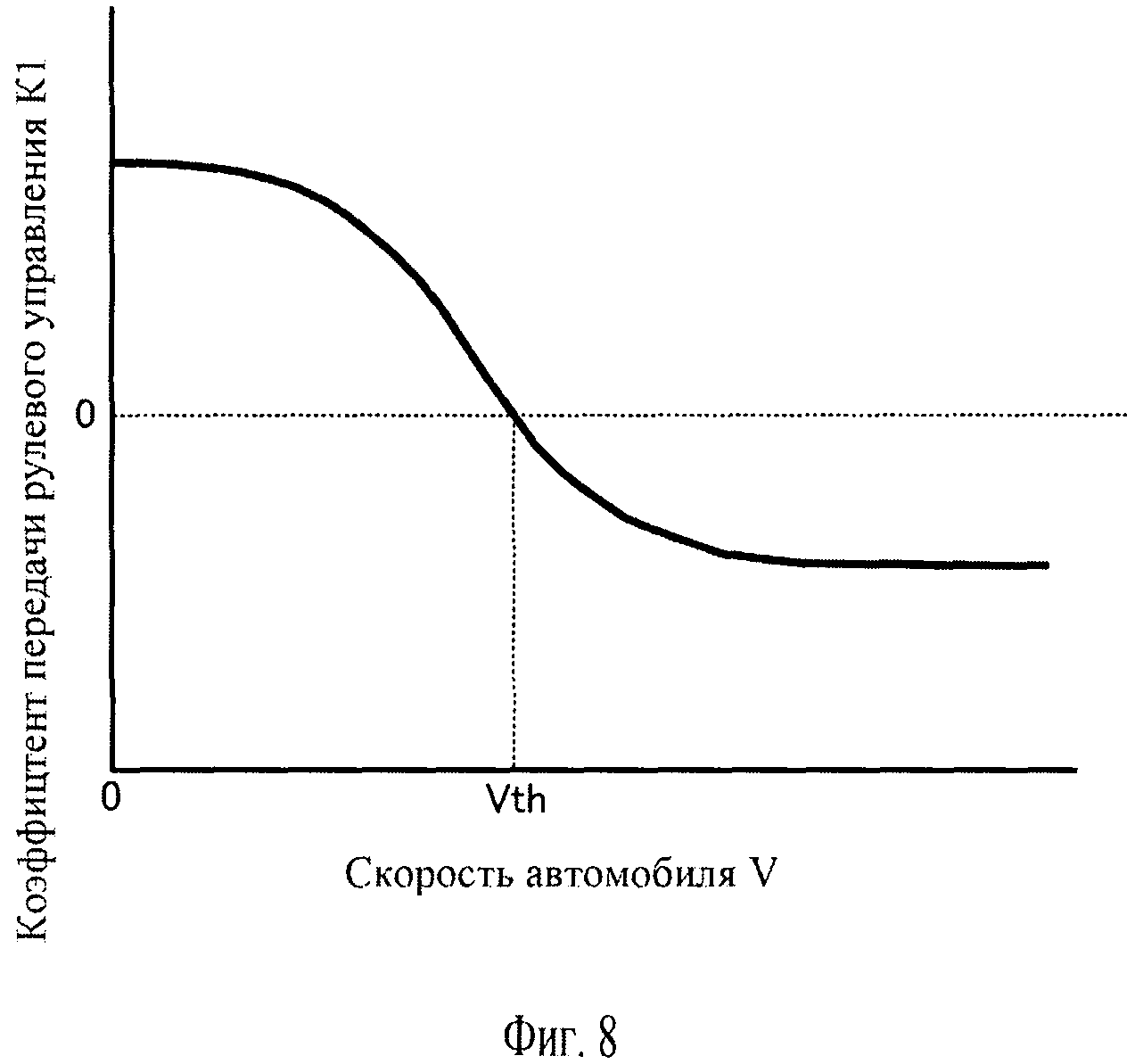
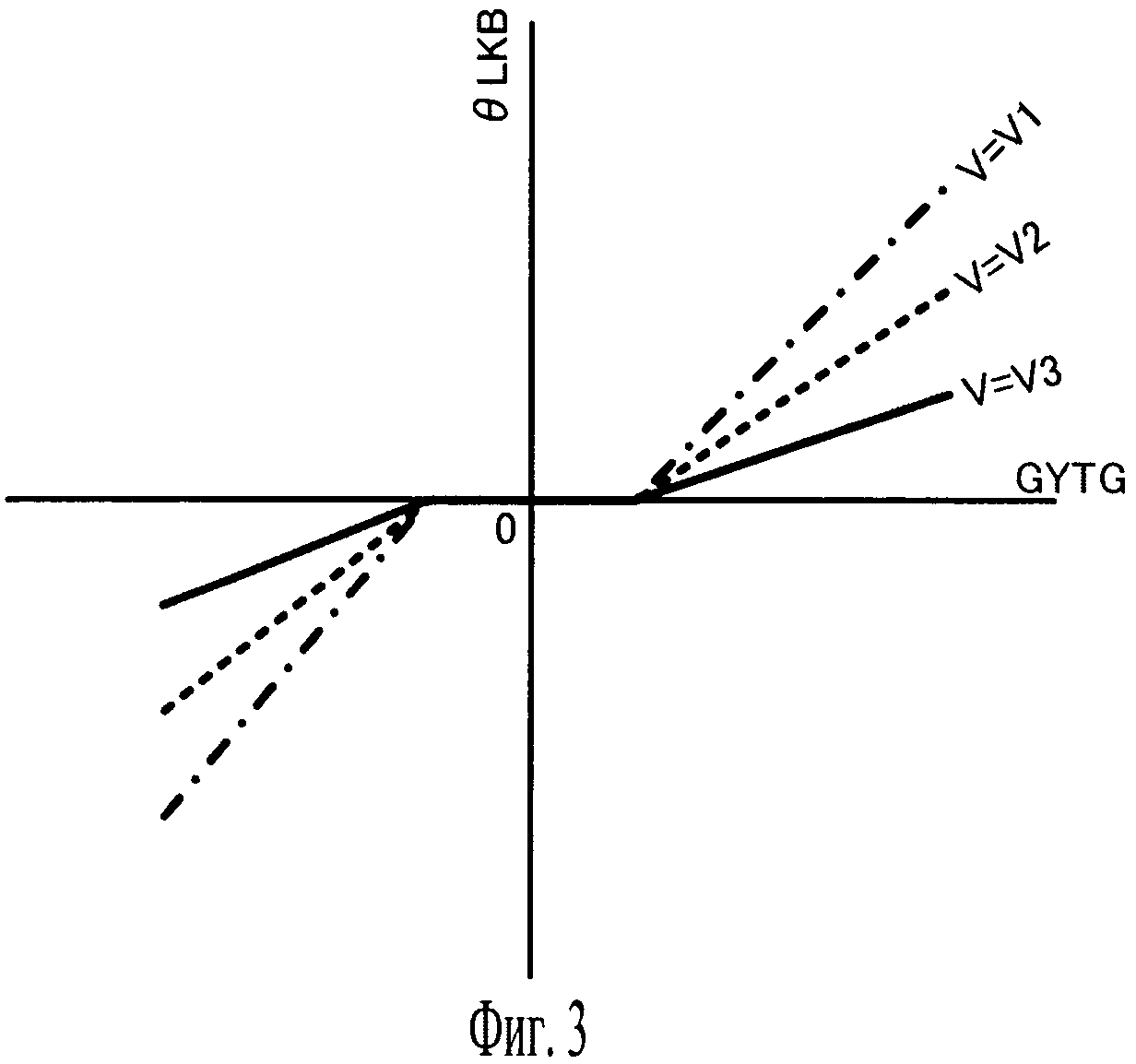
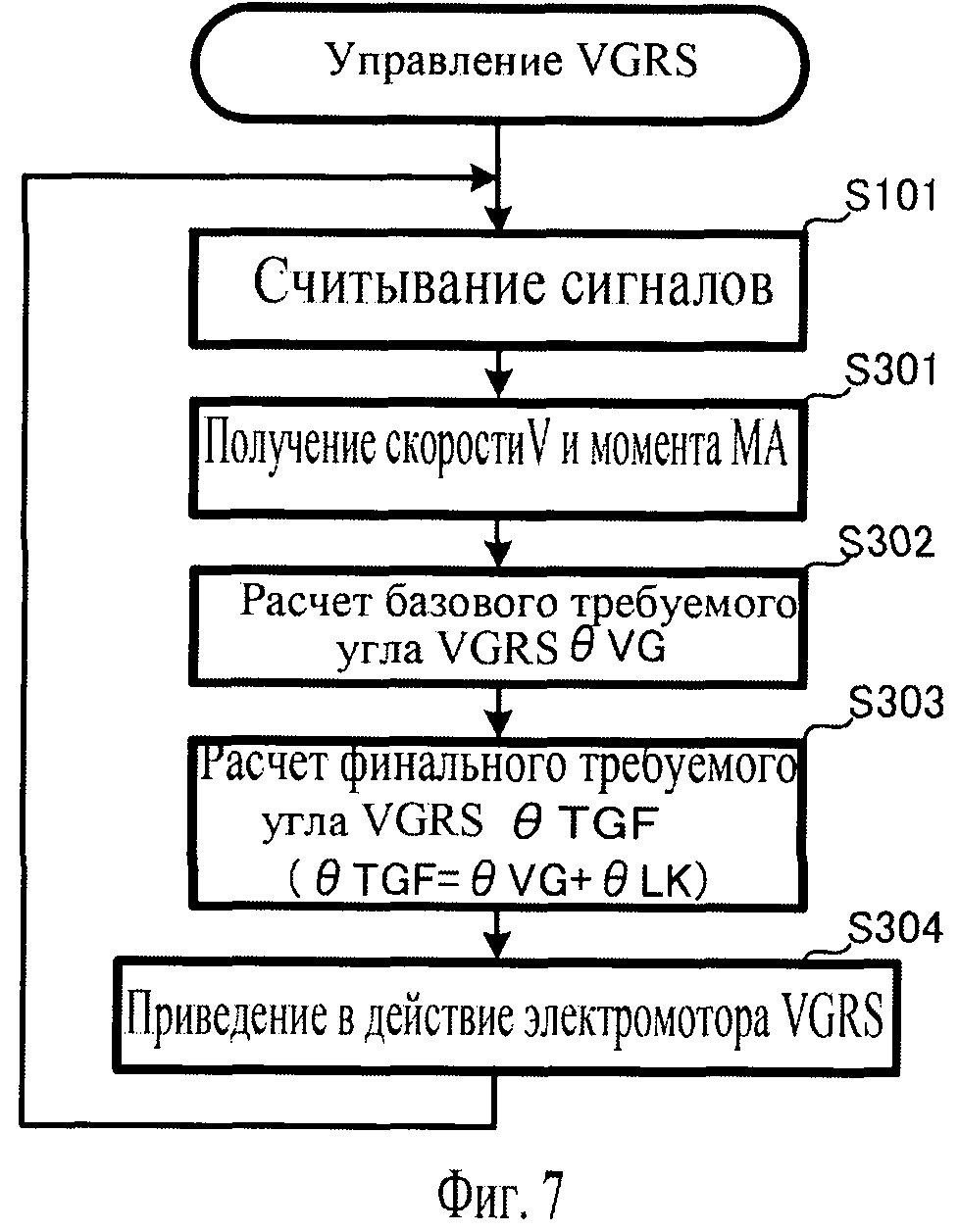
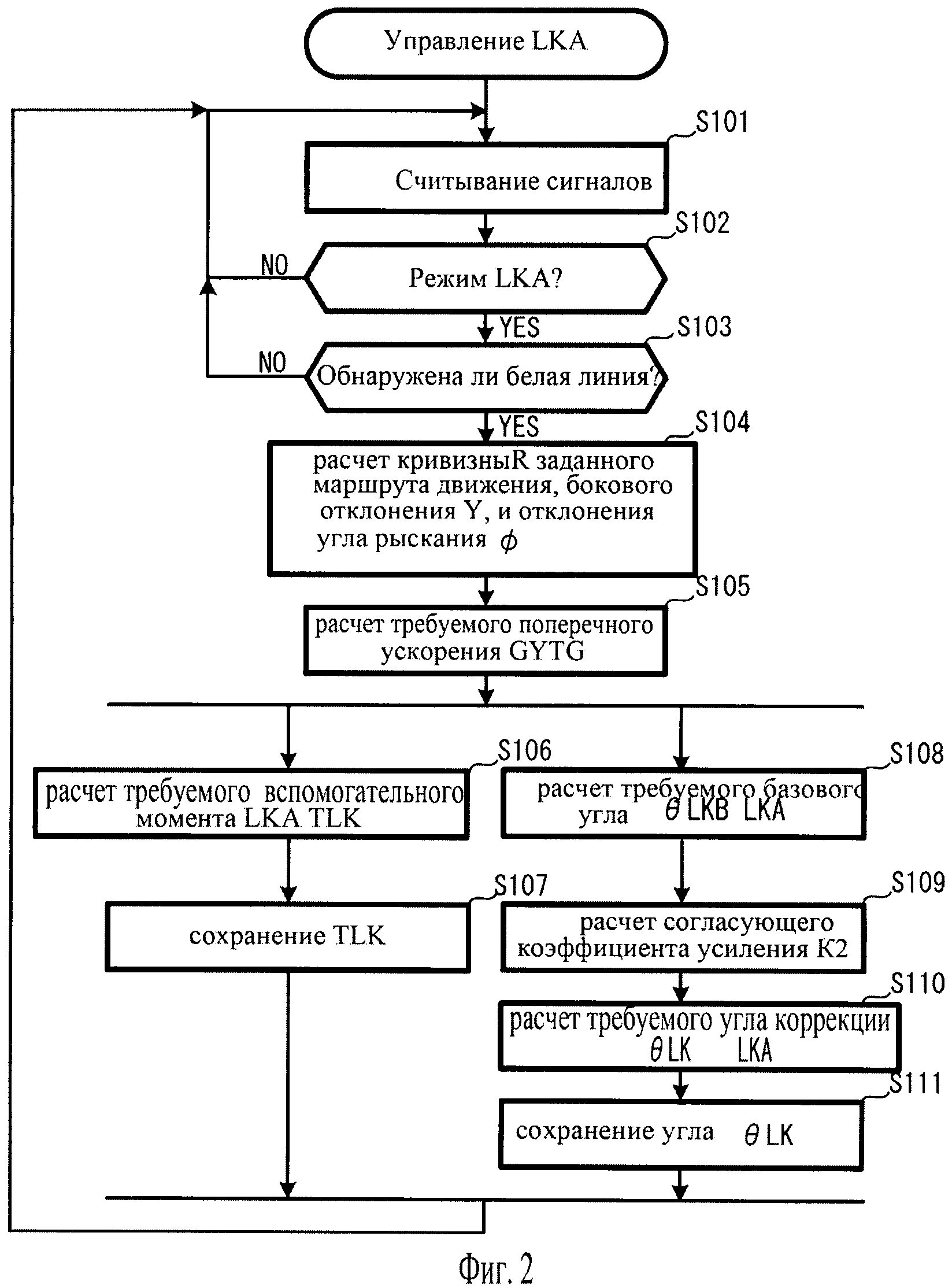
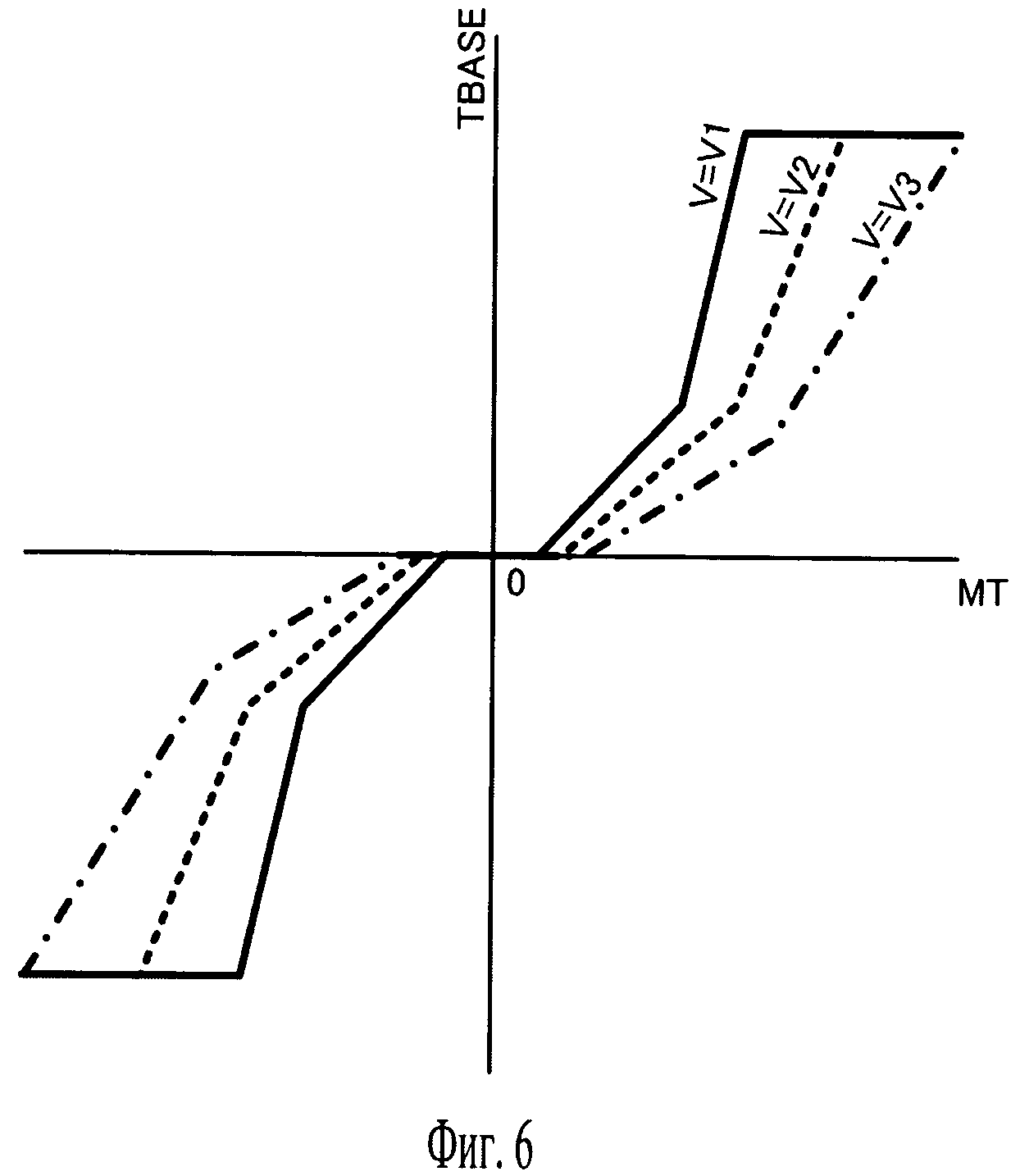
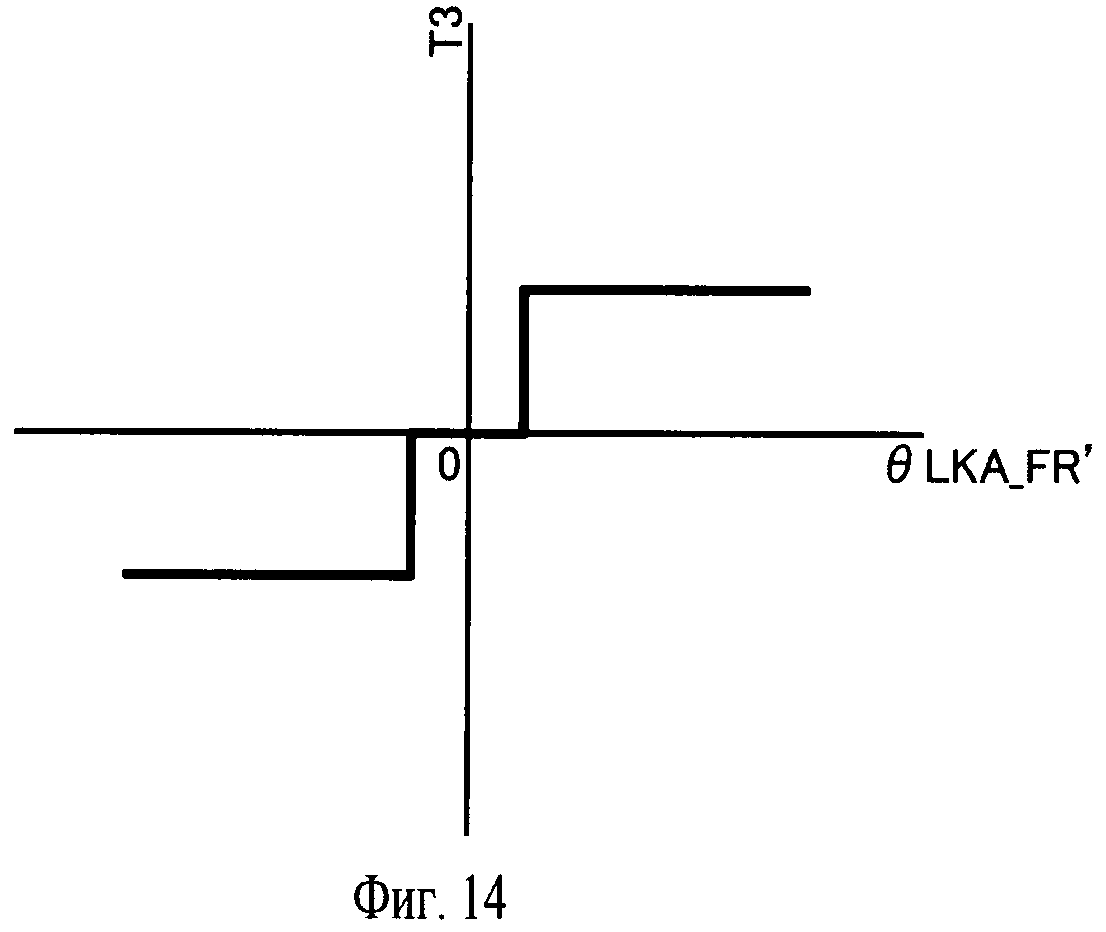
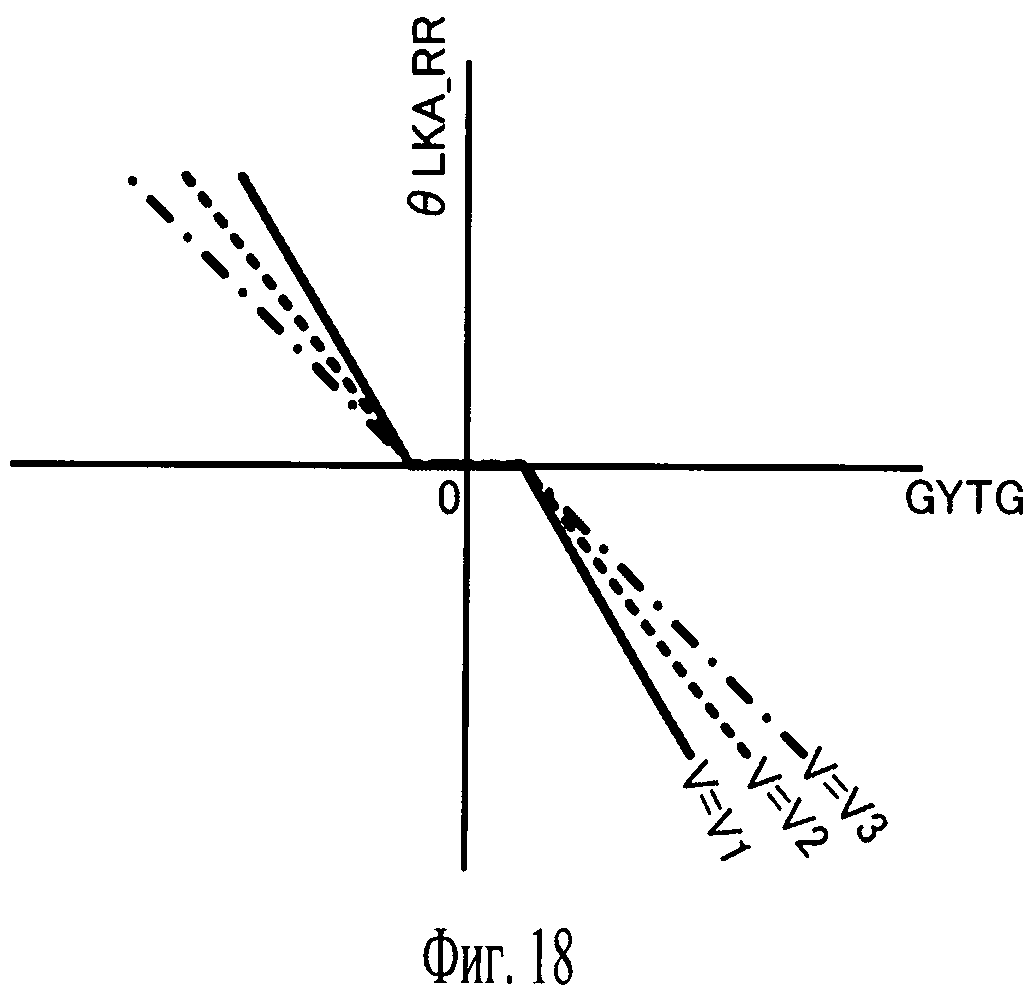
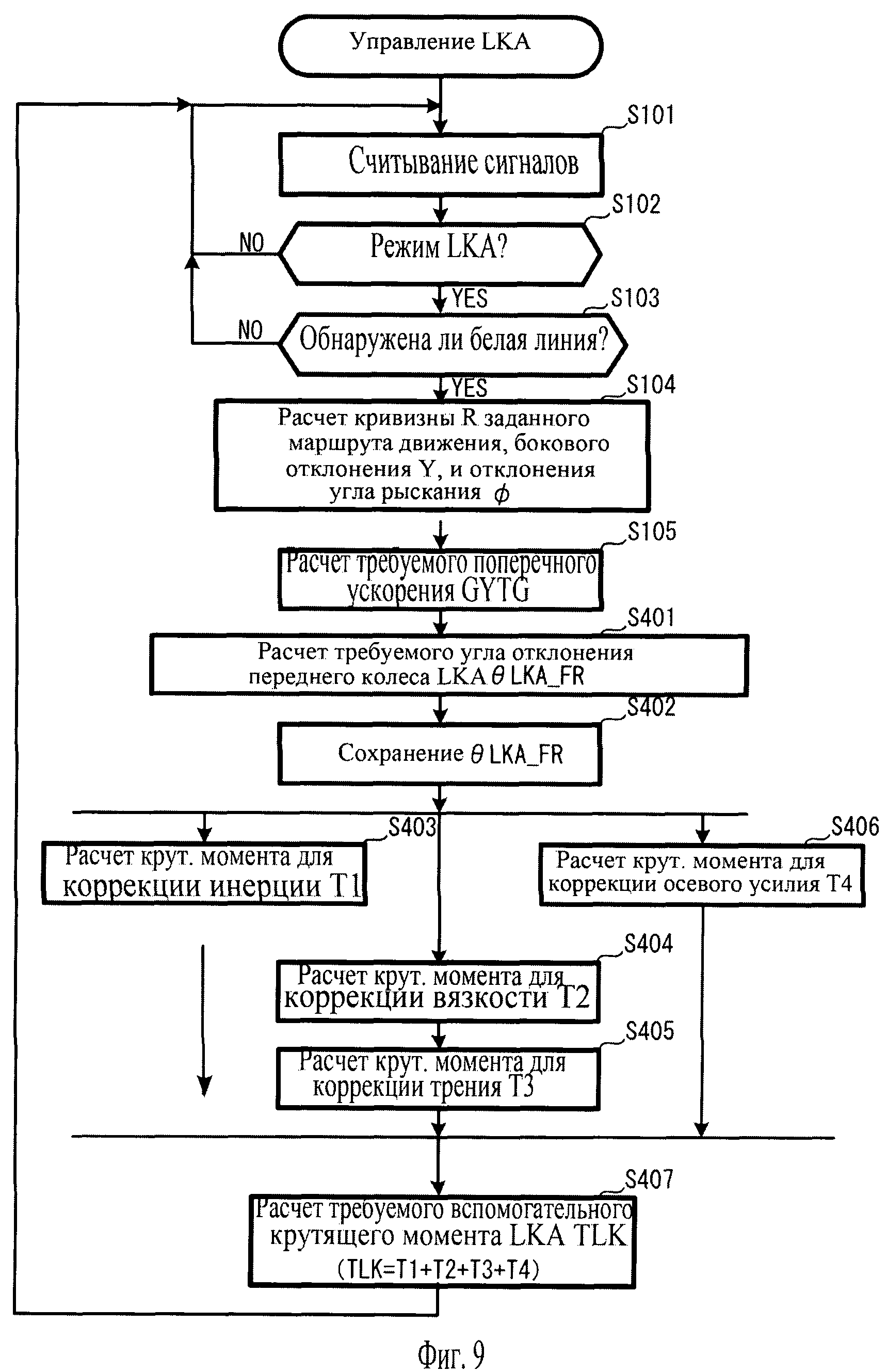
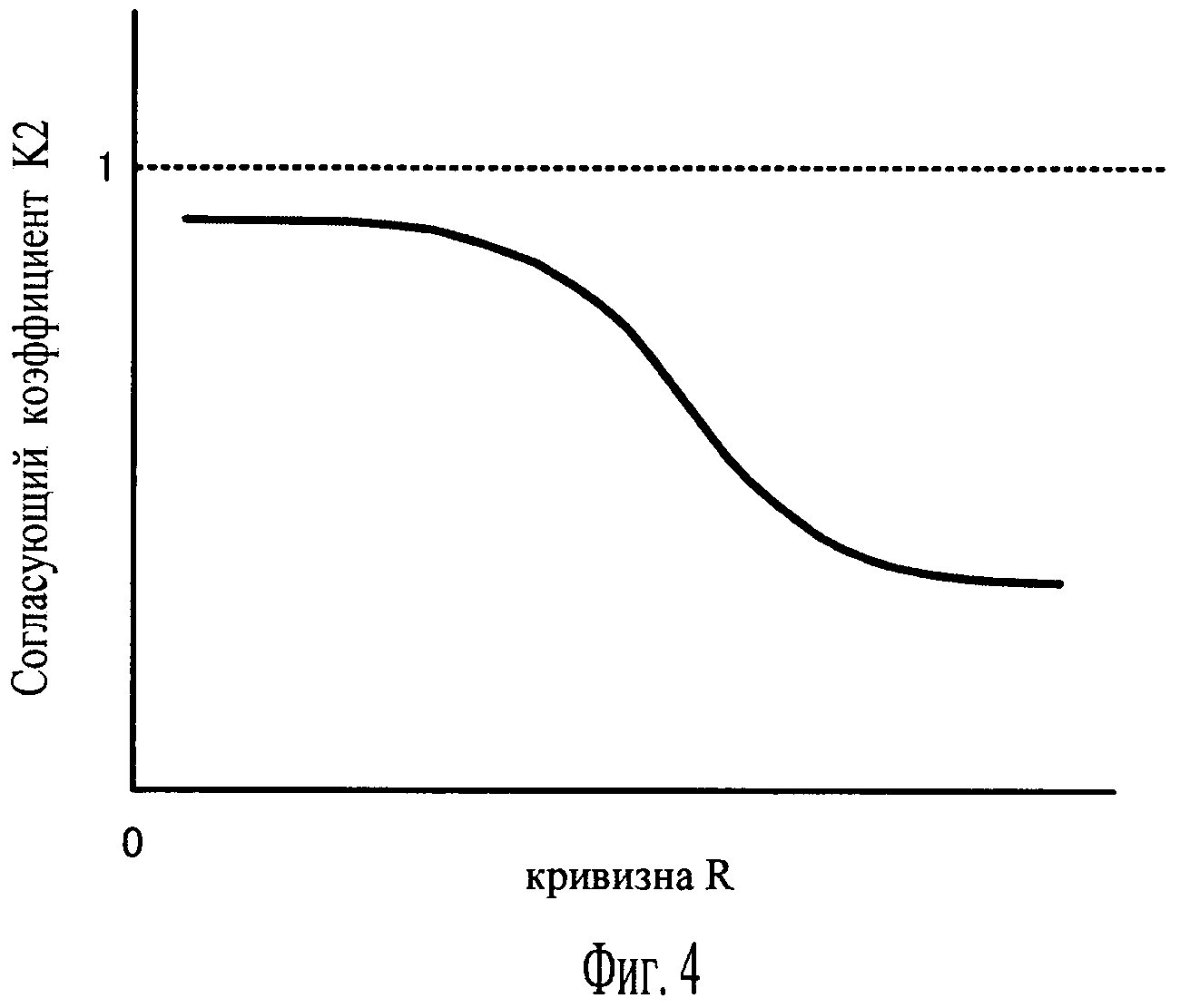
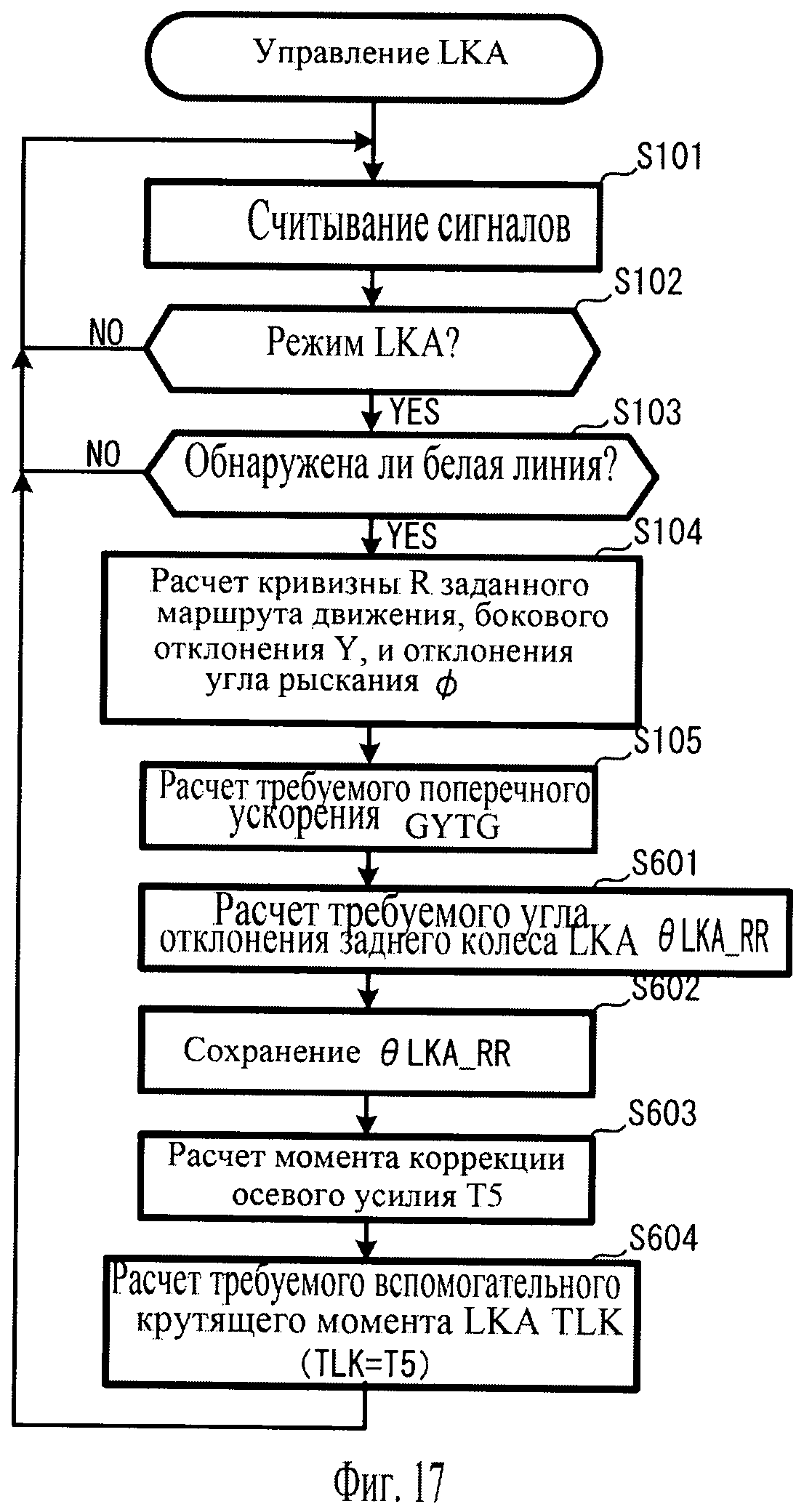
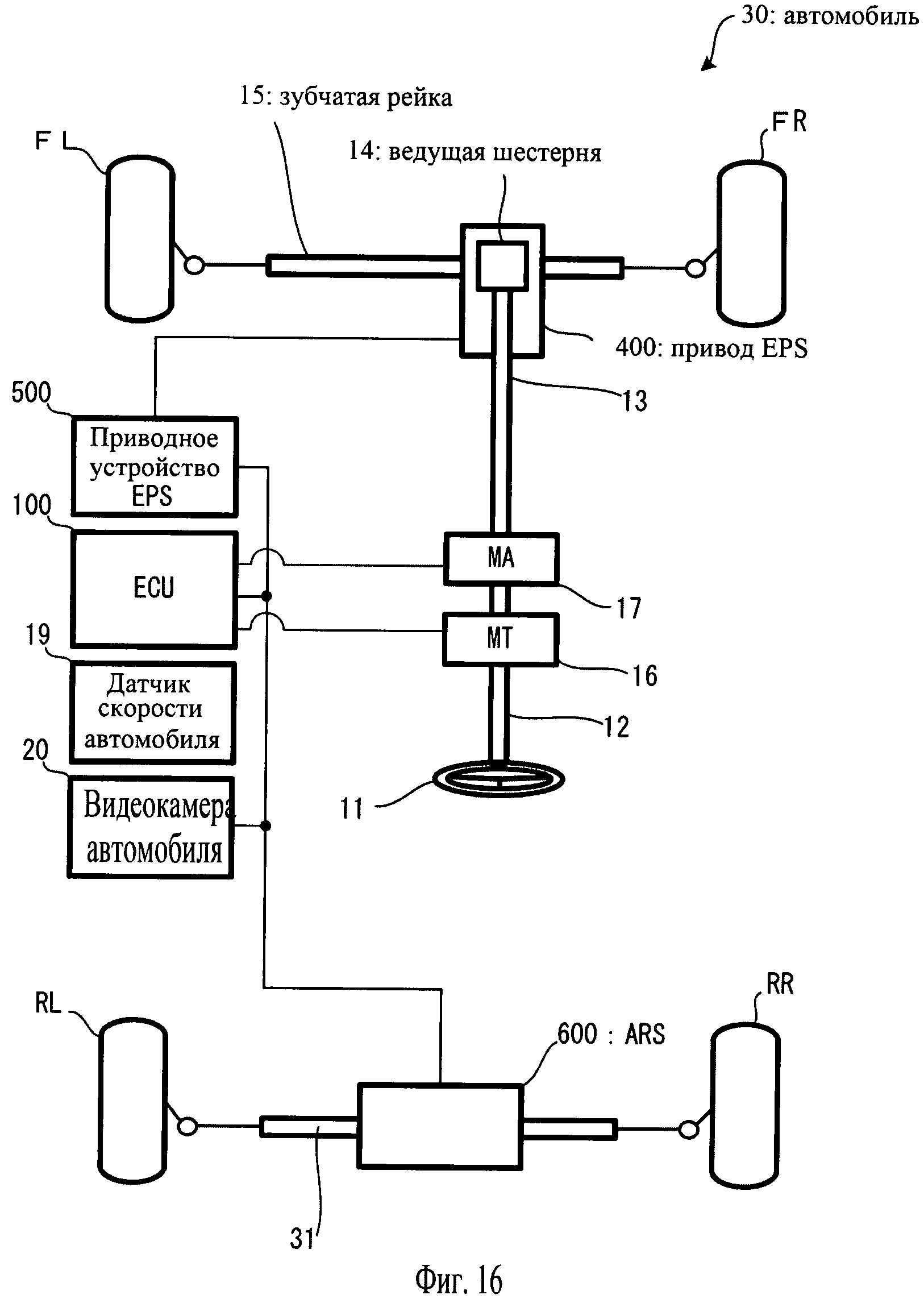
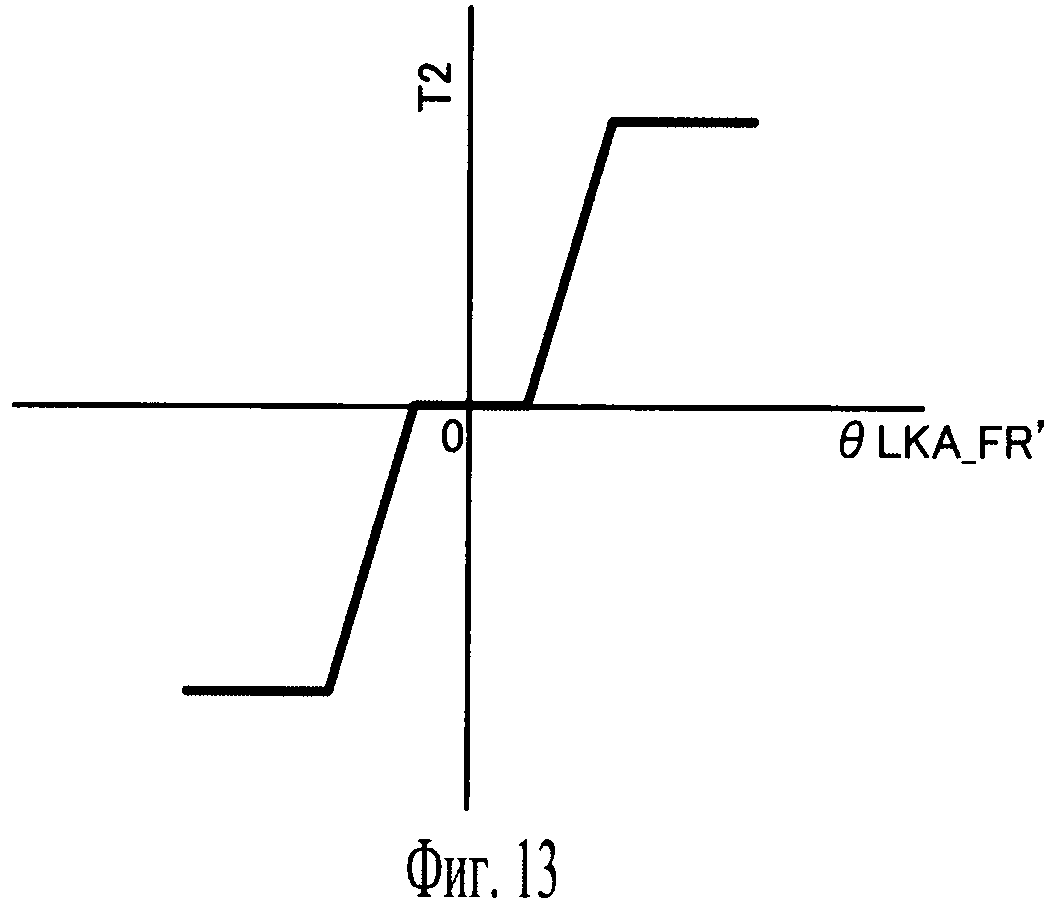
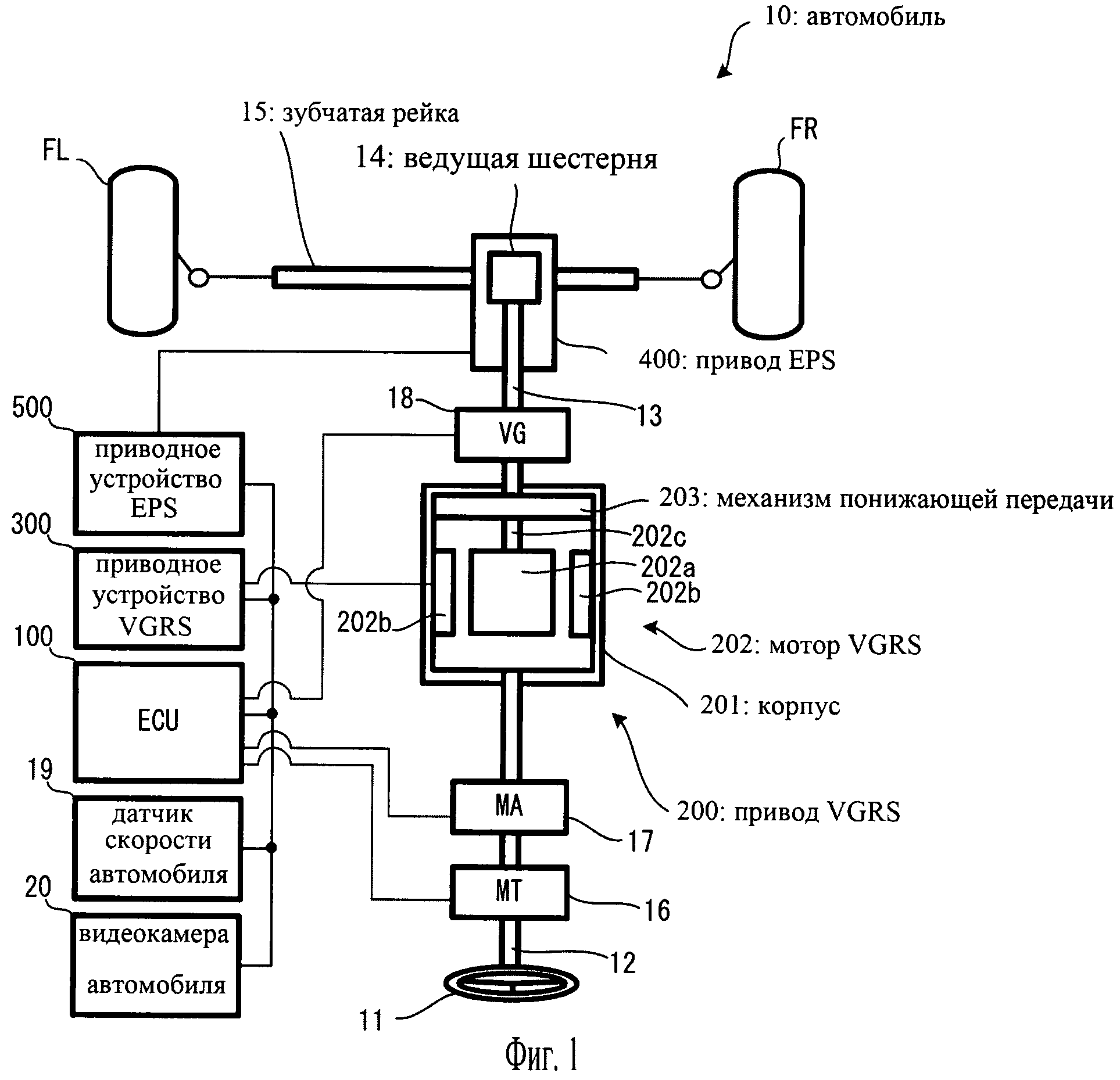
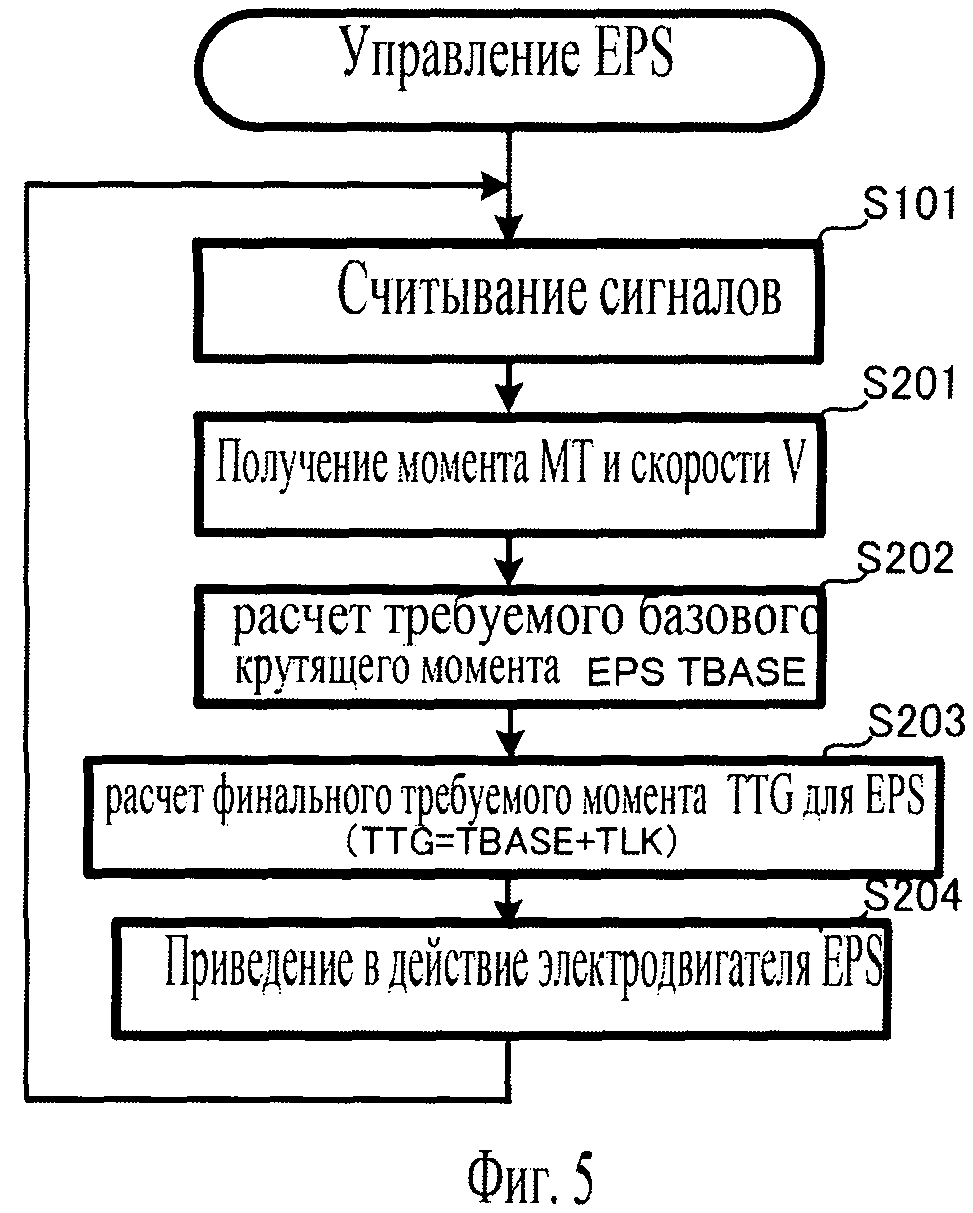
Верхнеподвесная конструкция двери
Система управления транспортного средства
Система управления транспортного средства
Система зарядки
Микропузырьковая система очистки для крупного изделия, такого как транспортное средство
Двигатель внутреннего сгорания с искровым зажиганием
Двигатель внутреннего сгорания с искровым зажиганием
Система для запуска двигателя и способ управления двигателем
Двигатель внутреннего сгорания с искровым зажиганием
Двигатель внутреннего сгорания с искровым зажиганием
Устройство управления для транспортного средства
Система определения свойства топлива для двигателя внутреннего сгорания
Верхнеподвесная конструкция двери
Система управления транспортного средства
Система управления транспортного средства
Система зарядки
Микропузырьковая система очистки для крупного изделия, такого как транспортное средство
Двигатель внутреннего сгорания с искровым зажиганием
Двигатель внутреннего сгорания с искровым зажиганием
Система для запуска двигателя и способ управления двигателем

