Результат интеллектуальной деятельности: УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ
Вид РИД
Изобретение
Изобретение относится к области электротехники, а именно к управлению асинхронными двигателями.
Известно устройство управления асинхронным электродвигателем, содержащее асинхронный двигатель, ШИМ-инвертор, датчик скорости, преобразователь координат, регулятор тока, интегратор, генератор команд на изменение тока, схемы формирования команд на изменение напряжения, команд на изменение угловой частоты вращения, команд на изменение глубины модуляции, сигналов управления ШИМ-инвертором (RU патент №2193814, МПК 7 Н02Р 21/00, опубл. 27.11.2002 г.).
Недостатком известного устройства управления является то, что для его функционирования необходимо оборудовать двигатель датчиком скорости, что снижает область применения данного устройства управления.
Известна система управления асинхронным двигателем, которая выбрана в качестве прототипа, состоящая из блока ввода заданной частоты вращения асинхронного двигателя, блока рассогласования, регулятора напряжения, блока драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, автономного инвертора напряжения, датчика текущей частоты вращения асинхронного двигателя, блока вычисления синхронной частоты вращения асинхронного двигателя, наблюдателя состояния (RU патент №2390091, МПК 8 Н02Р 21/08, Н02Р 21/13, Н02Р 23/08, Н02Р 27/06, опубл. 20.05.2010 г.).
Недостатком известной системы управления является то, что для вычисления электрической частоты вращения ротора двигателя наблюдателем состояния необходимо использование датчика скорости, что снижает надежность данной системы.
Задачей изобретения является повышение надежности управления электродвигателем.
Поставленная задача решена за счет того, что устройство управления асинхронным двигателем также как и в прототипе содержит автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения.
Согласно изобретению силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения. В качестве наблюдателя состояния выбран наблюдатель Люенбергера. Блок драйверов соединен с выходами ШИМ-генератора. К блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый преобразователь координат, второй преобразователь координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор. Блок интерфейса подключен к третьему сумматору. Первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору. Наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат. Выходы датчиков токов соединены со входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.
Предлагаемое устройство позволяет улучшить динамические характеристики и повысить надежность управления асинхронным двигателем за счет использования нечеткого регулятора скорости совместно с ПИ-регулятором скорости, а также наблюдателя Люенбергера, связанного с двумя сумматорами. Улучшение динамических характеристик электропривода обеспечивается нечетким регулятором скорости, который позволяет уменьшить динамический провал скорости двигателя при воздействии возмущающих сигналов. Совместное применение ПИ-регулятора скорости с нечетким регулятором обеспечивает астатизм электропривода по возмущению. Использование наблюдателя Люенбергера позволяет повысить надежность управления асинхронным двигателем за счет отказа от механических датчиков скорости и потокосцепления ротора, при этом простое математическое описание наблюдателя позволяет уменьшить вычислительную ресурсоемкость микроконтроллера, требуемую для процедуры восстановления неизмеряемых координат электропривода - скорости и потокосцепления ротора.
На фиг. 1 изображена структурная схема устройства управления асинхронным двигателем.
Устройство управления асинхронным двигателем содержит автономный инвертор напряжения 1 (АИН), силовые выходы которого через датчики фазных токов 2, 3, 4 (ДТ) подключены к статорным обмоткам асинхронного двигателя 5 (М). Силовые входы автономного инвертора напряжения 1 (АИН) соединены с выходами неуправляемого выпрямителя 6 (НВ), входы которого подключены к источнику трехфазного переменного напряжения 7 (ИТПН). Управляющие входы автономного инвертора напряжения 1 (АИН) через блок драйверов 8 (БД) соединены с выходами ШИМ-генератора 9 (ШИМ-Г). К блоку интерфейса 10 (БИ) последовательно подключены входной фильтр 11 (ВФ), первый сумматор 12 (С1), ПИ-регулятор скорости 13 (ПИ-РС), второй сумматор 14 (С2), первый ПИ-регулятор тока 15 (ПИ-РТ 1), первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), наблюдатель Люенбергера 18 (НЛ), третий сумматор 19 (С3), ПИ-регулятор потокосцепления 20 (ПИ-РП), четвертый сумматор 21 (С4), второй ПИ-регулятор тока 22 (ПИ-РТ 2), первый преобразователь координат 16 (ПК 1), ШИМ-генератор 9 (ШИМ-Г). Блок интерфейса 10 (БИ) связан с третьим сумматором 19 (С3). Первый сумматор 12 (С1) соединен с нечетким регулятором скорости 23 (Н-РС), выход которого подключен ко второму сумматору 14 (С2). Наблюдатель Люенбергера 18 (НЛ) связан с первым сумматором 12 (С1), первым преобразователем координат 16 (ПК 1) и третьим преобразователем координат 24 (ПК 3). Датчики фазных токов 2, 3, 4 (ДТ) соединены со вторым преобразователем координат 17 (ПК 2), выходы которого подключены к третьему преобразователю координат 24 (ПК 3), который соединен с четвертым сумматором 21 (С4) и со вторым сумматором 14 (С2). Блок интерфейса 10 (БИ) связан с персональным компьютером (не показан на фиг.1).
В качестве датчиков фазных токов 2, 3, 4 (ДТ) могут быть использованы датчики тока - промышленный прибор КЭИ-0,1. Неуправляемый выпрямитель 6 (НВ) и автономный инвертор напряжения 1 (АИН) конструктивно выполнены в одном устройстве - преобразователе частоты, в качестве которого может быть использован преобразователь частоты VLT FC 300 фирмы Danfoss. Блок драйверов 8 (БД) может быть выполнен на драйверах типа ДРИ11-10-12-1 ОМ1К-1 для управления IGBT модулями. ПИ-регулятор скорости 13 (ПИ-РС), ПИ-регулятор потокосцепления 20 (ПИ-РП), первый ПИ-регулятор тока 15 (ПИ-РТ 1) и второй ПИ-регулятор тока 22 (ПИ-РТ 2) могут быть выполнены на операционных усилителях типа 157УД4 с конденсатором в цепи обратной связи. Сумматоры 12 (С1), 14 (С2), 19 (С3) и 21 (С4) могут быть выполнены на операционных усилителях типа 157УД4. Входной фильтр 11 (ВФ) представляет собой апериодическое звено первого порядка и может быть выполнен на базе RC-цепочки. Первый преобразователь координат 16 (ПК 1), второй преобразователь координат 17 (ПК 2), третий преобразователь координат 24 (ПК 3), нечеткий регулятор скорости 23 (Н-РС), наблюдатель Люенбергера 18 (НЛ) и ШИМ-генератор 9 (ШИМ-Г) могут быть выполнены на базе микроконтроллера типа TMS320F2812 фирмы Texas Instruments. Блок интерфейса 10 (БИ) может быть реализован на базе последовательного преобразователя интерфейса RS-232.
При включении устройства с персонального компьютера поступает сигнал управления на блок интерфейса 10 (БИ), от которого одновременно подаются команды задания на потокосцепление и на скорость вращения асинхронного двигателя 5 (М) на третий сумматор 19 (С3) и входной фильтр 11 (ВФ) соответственно. От входного фильтра 11 (ВФ) сигнал поступает на первый сумматор 12 (С1), в котором суммируется с отрицательным значением сигнала оценки скорости от наблюдателя Люенбергера 18 (НЛ). От первого сумматора 12 (С1) сигнал поступает одновременно на нечеткий регулятор скорости 23 (Н-РС) и ПИ-регулятор скорости 13 (ПИ-РС). Далее сигналы с нечеткого регулятора скорости 23 (Н-РС) и ПИ-регулятора скорости 13 (ПИ-РС) идут на второй сумматор 14 (С2), где суммируются с отрицательным значением сигнала проекции вектора тока статора на ось ординат вращающейся системы координат от третьего преобразователя координат 24 (ПК 3). Со второго сумматора 14 (С2) сигнал поступает на первый ПИ-регулятор тока 15 (ПИ-РТ 1). В третьем сумматоре 19 (С3) происходит суммирование команды задания на потокосцепление и отрицательного значения сигнала оценки потокосцепления с наблюдателя Люенбергера 18 (НЛ). Далее сигнал поступает на ПИ-регулятор потокосцепления 20 (ПИ-РП), с которого идет на четвертый сумматор 21 (С4), где суммируется с отрицательным значением сигнала проекции вектора тока статора на ось абсцисс вращающейся системы координат с третьего преобразователя координат 24 (ПК 3). С четвертого сумматора 21 (С4) сигнал поступает на второй ПИ-регулятор тока 22 (ПИ-РТ 2). На первый преобразователь координат 16 (ПК 1) одновременно поступают сигналы с первого ПИ-регулятора тока 15 (ПИ-РТ 1), второго ПИ-регулятора тока 22 (ПИ-РТ 2) и сигнал оценки угла поворота вектора потокосцепления с наблюдателя Люенбергера 18 (НЛ). С первого преобразователя координат 16 (ПК 1) сигналы фазных напряжений одновременно поступают на ШИМ-генератор 9 (ШИМ-Г) и на второй преобразователь координат 17 (ПК 2). С ШИМ-генератора 9 (ШИМ-Г) сигналы идут на блок драйверов 8 (БД). На второй преобразователь координат 17 (ПК 2) также поступают сигналы с датчиков фазных токов 2, 3, 4 (ДТ). Со второго преобразователя координат 17 (ПК 2) проекции векторов тока и напряжения статора на оси неподвижной системы координат поступают на наблюдатель Люенбергера 18 (НЛ). На третий преобразователь координат 24 (ПК 3) поступают сигналы проекций вектора тока статора на оси неподвижной системы координат со второго преобразователя координат 17 (ПК 2). С источника трехфазного переменного напряжения 7 (ИТПН) сигналы поступают на неуправляемый выпрямитель 6 (НВ). На автономный инвертор напряжения 1 (АИН) одновременно поступают сигнал выпрямленного напряжения с неуправляемого выпрямителя 6 (НВ) и сигналы управления силовыми ключами инвертора с блока драйверов 8 (БД). С автономного инвертора напряжения 1 (АИН) сигналы поступают на датчики фазных токов 2, 3, 4 (ДТ) и далее на статорные обмотки асинхронного двигателя 5 (М). Таким образом заявляемое устройство позволяет регулировать скорость и потокосцепление асинхронного двигателя 5 (М).
Устройство управления асинхронным двигателем, содержащее автономный инвертор напряжения, наблюдатель состояния и блок драйверов, выходы которых соединены с управляющими входами автономного инвертора напряжения, отличающееся тем, что силовые выходы автономного инвертора напряжения через датчики токов подключены к статорным обмоткам асинхронного двигателя, а силовые входы автономного инвертора напряжения соединены с выходами неуправляемого выпрямителя, входы которого подключены к источнику трехфазного переменного напряжения, в качестве наблюдателя состояния выбран наблюдатель Люенбергера, блок драйверов соединен с выходами ШИМ-генератора, к блоку интерфейса последовательно подключены входной фильтр, первый сумматор, ПИ-регулятор скорости, второй сумматор, первый ПИ-регулятор тока, первый и второй преобразователи координат, наблюдатель Люенбергера, третий сумматор, ПИ-регулятор потокосцепления, четвертый сумматор, второй ПИ-регулятор тока, первый преобразователь координат, ШИМ-генератор, при этом блок интерфейса подключен к третьему сумматору, первый сумматор соединен с нечетким регулятором скорости, выход которого подключен ко второму сумматору, а наблюдатель Люенбергера соединен с первым сумматором, первым и третьим преобразователями координат, причем выходы датчиков токов соединены с входами второго преобразователя координат, выходы которого подключены к третьему преобразователю координат, который соединен с четвертым и вторым сумматорами, а блок интерфейса связан с персональным компьютером.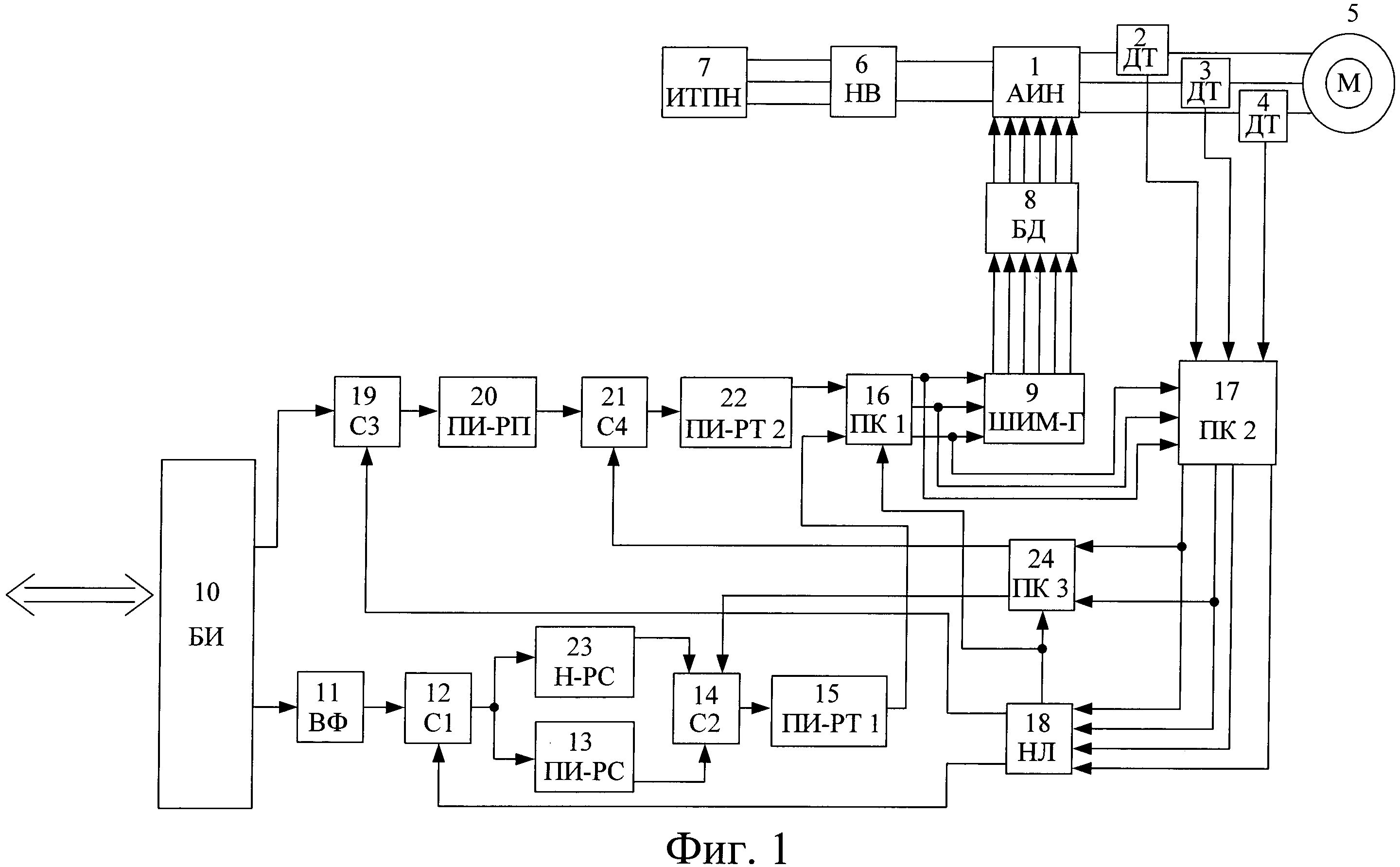
Электропривод переменного тока
Способ определения статических характеристик нагрузки по напряжению
Способ диагностики витковых замыканий в обмотке ротора синхронного генератора
Способ измерения реактивной мощности в трехфазной симметричной электрической цепи
Цеолитсодержащий катализатор, способ его получения и способ переработки прямогонного бензина в высокооктановый компонент бензина с пониженным содержанием бензола
Способ получения волластонитовых керамических пигментов на основе двухкальциевого силиката
Устройство для возбуждения высокочастотного факельного разряда
Устройство для моделирования объединенного регулятора потока мощности
Способ определения оптимальной скорости резания
Способ получения нанодисперсной шихты для изготовления нитридной керамики
Электроимпульсный буровой снаряд
Установка для обработки буровых и тампонажных растворов
Способ электроразрядного разрушения твердых материалов
Способ идентификации водородного охрупчивания легких сплавов на основе титана

