Результат интеллектуальной деятельности: БЕЗГИРОСКОПНАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА
Вид РИД
Изобретение
Область техники
Изобретение относится к области инерциальной навигации и может использоваться для определения текущих координат объекта и его угловой ориентации. Устройство может применяться как автономно, так и в сочетании со спутниковыми радионавигационными системи GPS и ГЛОНАСС.
Уровень техники
Известно устройство, описанное в патенте США 2010/0268414 [1]. Данное устройство предназначено для оценки угловой скорости мобильного объекта.
Известно устройство, описанное в патенте США 2010/0114517 [2]. Данное устройство предназначено для определения пространственной ориентации объекта.
К недостаткам данных устройств относится невысокая точность определения пространственной ориентации объекта на основе показаний акселерометров.
Наиболее близким аналогом предлагаемого изобретения и принятым в качестве прототипа является устройство, описанное в работе [3], которое включает модуль из шести акселерометров, блок расчета составляющих углового ускорения, интегрирующий блок, блок расчета коэффициентов матрицы координатных преобразований, блок расчета ускорений в связанной системе координат, блок расчета ускорений в Земной системе координат, блок расчета навигационных параметров.
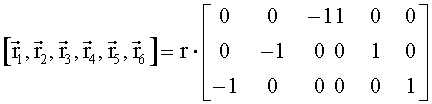
При этом модуль из шести акселерометров содержит одноосные акселерометры, координаты  которых в подвижной системе координат и ориентация
которых в подвижной системе координат и ориентация  их чувствительных осей заданы следующим образом:
их чувствительных осей заданы следующим образом:
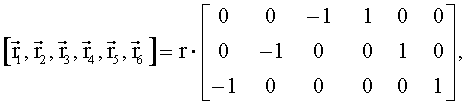

где r - расстояние от точки установки акселерометра до центра подвижной системы координат.
Определение навигационных параметров объекта (координат и скорости) в текущий момент времени с помощью данного устройства выполняется следующим образом. Блок расчета составляющих углового ускорения определяет величины углового ускорения объекта на основе показаний шести акселерометров. Интегрирующий блок определяет значения угловой скорости путем интегрирования значений углового ускорения. Блок расчета коэффициентов матрицы координатных преобразований выполняет определение угловой ориентации объекта на основе значений угловой скорости. Блок расчета ускорений в связанной системе координат выполняет расчет данных ускорений на основе значений составляющих угловой скорости и данных, снимаемых с акселерометров. Блок расчета ускорений в Земной системе координат определяет данные ускорения путем компенсации вектора гравитации из значений «кажущегося» ускорения. Блок расчета навигационных параметров осуществляет расчет скорости и координат объекта путем однократного и 2-кратного интегрирования ускорений в Земной системе координат.
Недостатком прототипа является невысокая точность определения угловой ориентации объекта. Это обусловлено тем, что для определения угловой ориентации необходимо двойное интегрирование углового ускорения, определяемого на основе показаний акселерометров. При этом происходит двойное интегрирование низкочастотного шума акселерометров. Поскольку низкочастотная составляющая практически является детерминированной величиной, то это ведет к тому, что погрешность определения угловой ориентации имеет монотонный рост и зависит от времени как ~t2. Т.к. координаты объекта определяются на основе последующего двойного интегрирования значений угловой ориентации, то погрешность определения координат монотонно возрастает и оценивается как ~t4.
Раскрытие изобретения
Задачей предлагаемого изобретения является повышение точности определения угловой ориентации объекта за счет перехода от двухкратного к однократному интегрированию показаний акселерометров. Техническим результатом, позволяющим выполнить поставленную задачу, является снижение кратности интегрирования показаний акселерометров и уменьшение скорости роста погрешностей определения угловой ориентации и координат объекта.
Сутью данного изобретения является определение угловой скорости объекта на основе «прямых» показаний акселерометров, т.е. без выполнения процедуры интегрирования. В этом случае при определении угловой ориентации будет использоваться однократное интегрирование показаний акселерометров, что приведет к уменьшению роста погрешности до величины ~t. Для выполнения данного условия предлагается определять базовые навигационные переменные на основе показаний акселерометров (Aaccel,j), где j - номер акселерометра. В общем случае, имеется 12 базовых навигационных переменных
 ,
,
где FX, FY, FZ - составляющие «кажущегося» ускорения,  - составляющие углового ускорения, WX, WY, XZ - составляющие угловой скорости. Выражение, связывающее значения акселерометров (Aaccel,j) и базовых навигационных переменных (β), имеет следующий вид:
- составляющие углового ускорения, WX, WY, XZ - составляющие угловой скорости. Выражение, связывающее значения акселерометров (Aaccel,j) и базовых навигационных переменных (β), имеет следующий вид:
Aaccel,j=Qj·β, где
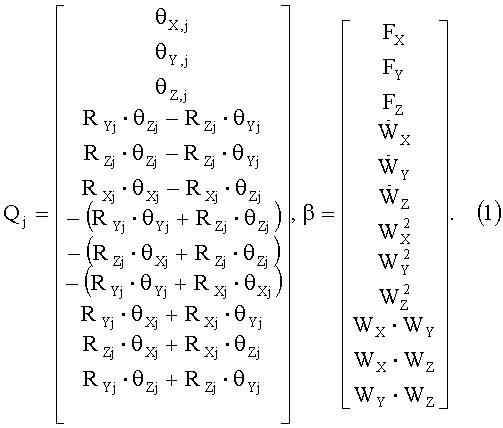
При этом матрица Q полностью определяется параметрами установки акселерометров: координатами акселерометров (Raccel,j) и ориентацией их чувствительных осей (θaccel,j). Значения β может быть определено на основе решения системы линейных уравнений:

Поскольку имеется 12 базовых навигационных переменных (β), то для их однозначного выделения на основе решения системы уравнений (2) предлагается использовать показания 12-ти акселерометров. При этом взаимное расположение акселерометров и ориентация их чувствительных осей выбираются из следующих условий:
- отсутствие вырожденности матрицы Q;
- максимизация значения детерминанта матрицы Q для снижения величины погрешности вычисления значения β, поскольку в выражении (2) используется Q-1.
Таким образом, увеличение числа акселерометров с 6-ти до 12-ти в предлагаемом изобретении, а также соответствующий выбор координат установки акселерометров и взаимной ориентации их чувствительных осей обеспечивают однозначное решение системы уравнений (2). При этом на основе показаний 12-ти акселерометров осуществляется расчет базовых навигационных параметров, из которых выделяются соответствующие составляющие угловой скорости. Однократное интегрирование составляющих угловой скорости обеспечивает более точное (по сравнению с прототипом) определение угловой ориентации объекта, задаваемое матрицей координатных преобразований.
Краткое описание чертежей
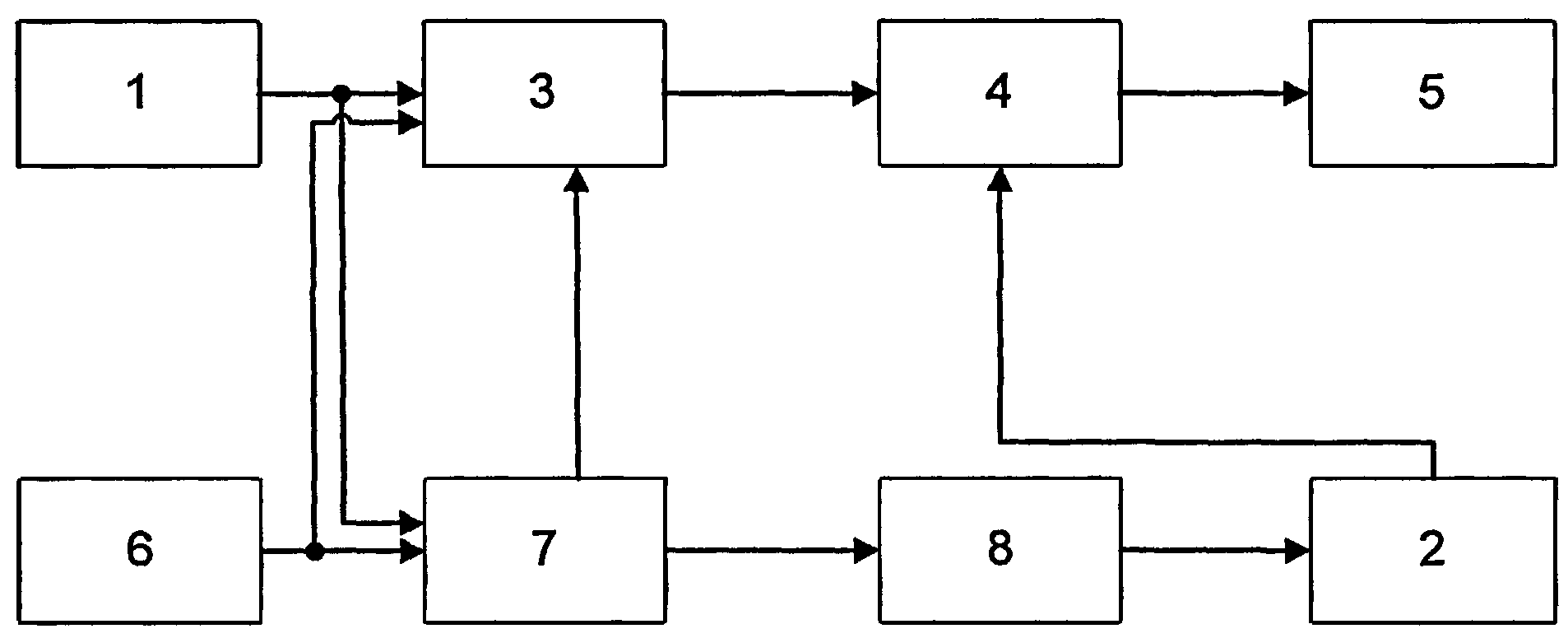
На фигуре представлена структурная схема безгироскопной инерциальной навигационной системы, состоящей из блоков:
1 - модуль первых шести акселерометров;
2 - блок расчета коэффициентов матрицы координатных преобразований;
3 - блок расчета ускорений в связанной системе координат;
4 - блок расчета ускорений в Земной системе координат;
5 - блок расчета навигационных параметров;
6 - модуль вторых шести акселерометров;
7 - блок расчета базовых навигационных переменных;
8 - блок расчета составляющих угловой скорости.
Осуществление изобретения
Безгироскопная инерциальная навигационная система, содержащая распределенное множество акселерометров, состоит из модуля акселерометров (1), блока расчета коэффициентов матрицы координатных преобразований (2), блока расчета ускорений в связанной системе координат (3), блока расчета ускорений в Земной системе координат (4), блока расчета навигационных параметров (5), при этом первые шесть акселерометров имеют координаты 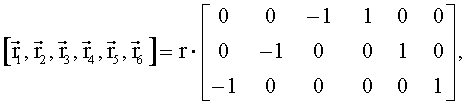
в связанной системе координат, где r - расстояние от точки установки акселерометра до центра системы координат.
Для обеспечения повышенной точности определения угловой ориентации объекта, а так же навигационных параметров: скорости и координат объекта, в устройство введены:
- модуль вторых шести акселерометров (6);
- блок расчета базовых навигационных переменных (7);
- блок расчета составляющих угловой скорости (8).
При этом ориентация чувствительных осей акселерометров (Θ), расположенных в модуле первых шести акселерометров (1), задана в связанной системе координат как

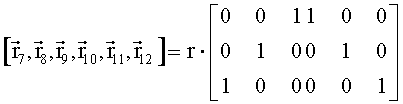
акселерометры, расположенные в модуле вторых шести акселерометров (6), имеют координаты
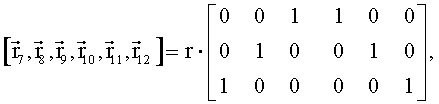
в связанной системе координат, а ориентация их чувствительных осей задана в связанной системе координат как

Модуль вторых шести акселерометров (6) в сочетании с модулем первых шести акселерометров обеспечивает возможность выделения базовых навигационных переменных:  , которые содержат составляющие угловой скорости объекта.
, которые содержат составляющие угловой скорости объекта.
Блок расчета базовых навигационных переменных (7) предназначен для определения данных составляющих (β) на основе показаний акселерометров.
Блок расчета составляющих угловой скорости (8) предназначен для расчета данных составляющих на основе базовых навигационных переменных.
Блоки (7) и (8) могут быть реализованы как аппаратно, так и программно.
Связи между устройствами осуществляются следующим образом:
- выходы модуля первых шести акселерометров (1) и модуля вторых шести акселерометров (6) подсоединены ко входам блока расчета базовых навигационных переменных (7) и блока расчета ускорений в связанной системе координат (3);
- выход блока базовых навигационных переменных (7) подсоединен ко входу блока расчета ускорений в связанной системе координат (3) и ко входу блока расчета составляющих угловой скорости (8);
- выход блока расчета составляющих угловой скорости (8) подсоединен во входу блока расчета коэффициентов матрицы координатных преобразований (2);
- выход блока расчета коэффициентов матрицы координатных преобразований (2) подключен ко входу блока расчета ускорений в Земной системе координат (4);
- выход блока расчета ускорений в связанной системе координат (3) подключен ко входу блока расчета ускорений в Земной системе координат (4);
- выход блока расчета ускорений в Земной системе координат (4) подключен ко входу блока расчета навигационных параметров (5).
Пример конкретной реализации.
Проведенное моделирование показало, что максимальное значение детерминанта матрицы Q, обеспечивающее минимизацию погрешности определения базовых навигационных параметров, выполняется при задании координат установки акселерометров и ориентации их чувствительных осей, представленных ниже в таблицах 1, 2.
|
|
Определение навигационных параметров объекта (координат  и скорости
и скорости  ) в текущий момент времени (ti) с помощью предлагаемого устройства выполняется следующим образом:
) в текущий момент времени (ti) с помощью предлагаемого устройства выполняется следующим образом:
Показания акселерометра могут быть определены как:
 , j∈1-12,
, j∈1-12,
где F - «кажущееся» ускорение объекта в подвижной системе координат; Rj - координаты установки акселерометра (см. табл.1); θaccel,j - ориентация чувствительных осей акселерометров (см. табл.2); W - угловая скорость объекта.
На основе 12-ти акселерометров базовые навигационные параметры β определяются как β=Q-1·Faccel.
Блок расчета базовых навигационных переменных (3) обеспечивает вычисление:
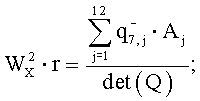
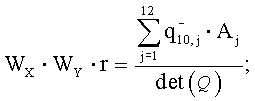
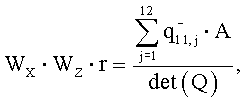
где  - элементы матрицы
- элементы матрицы  (обратной Qj), det(Q) - детерминант матрицы Q.
(обратной Qj), det(Q) - детерминант матрицы Q.
Блок расчета составляющих угловой скорости (4) выполняет следующее преобразование на основе полученных составляющих базовых навигационных параметров:
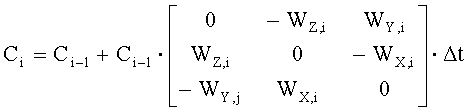
Блок расчета коэффициентов матрицы координатных преобразований (2) выполняет определение угловой ориентации объекта на основе значений угловой скорости W(ti):
Блок расчета ускорений в связанной системе координат (3) выполняет расчет данных ускорений на основе значений составляющих угловой скорости и данных, снимаемых с акселерометров:
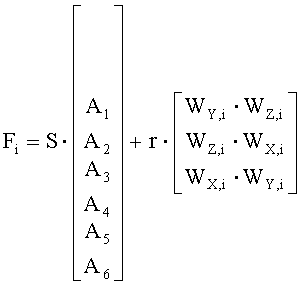
Блок расчета ускорений в Земной системе координат (4) определяет данные ускорения путем перевода «кажущегося» ускорения из связанной в Земную систему координат и компенсации из него вектора гравитации:
Pi=Ci·Fi, 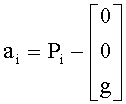
Блок расчета навигационных параметров (5) осуществляет расчет скорости V(t,) и координат R(ti) путем однократного и 2-кратного интегрирования ускорений:
Vi=Vi-1+ai·Δt, Ri=Ri-1+Vi·Δt+0.5·ai·Δt2.
Проведем оценку погрешности определения угловой ориентации и расчета координат объекта. Поскольку угловая ориентация определяется на основе однократного интегрирования показаний акселерометров, то это ведет к тому, что погрешность определения угловой ориентации оценивается как ~t. Т.к. координаты определяются на основе последующего двойного интегрирования значений угловой ориентации, то погрешность определения координат так же имеет монотонный рост и оценивается уже как ~t3.
Сравнение оценок роста погрешностей для прототипа и предложенного устройства показало, что предложенное устройство имеет выигрыш по точностным характеристикам определения навигационных параметров за счет уменьшения скорости роста погрешностей: если для прототипа вклад в погрешность ориентации и координат от низкочастотных шумов акселерометров составляет ~t2 ~t4, соответственно, то аналогичные оценки для прототипа выглядят как ~t и ~t3, соответственно.
Применение данного изобретения дает возможность повысить точность определения угловой ориентации объекта, а так же точность определения его навигационных параметров (координат и скорости).
Источники информации
1. Патент США 2010/0268414, G06F 7/00 20060101, G06F 007/00.
2. Патент США 2010/0114517, 702/92; 702/153.
3. Chao-Yu Hung, Chun-Min Fang, and Sou-Chen Lee "A Compensator to Advance Gyro-Free INS Precision", International Journal of Control, Automation, and Systems, vol.4, no.3, p.351-358, June 2006.
Безгироскопная инерциальная навигационная система, содержащая распределенное множество акселерометров, а именно модуль акселерометров, блок расчета коэффициентов матрицы координатных преобразований, блок расчета ускорений в связанной системе координат, блок расчета ускорений в земной системе координат, блок расчета навигационных параметров, при этом первые шесть акселерометров имеют координаты в связанной системе координат,где r - расстояние от точки установки акселерометра до центра системы координат, при этом выход модуля этих акселерометров подключен во входу блока расчета ускорений в связанной системе координат, выход блока расчета коэффициентов матрицы координатных преобразований подключен ко входу блока расчета ускорений в земной системе координат, выход блока расчета ускорений в связанной системе координат подключен ко входу блока расчета ускорений в земной системе координат, выход блока расчета ускорений в земной системе координат подключен ко входу блока расчета навигационных параметров, отличающаяся тем, что в состав системы введены модуль вторых шести акселерометров, блок расчета базовых навигационных переменных, блок расчета составляющих угловой скорости, при этом ориентация чувствительных осей акселерометров (Θ), расположенных в модуле первых шести акселерометров, задана в связанной системе координат как акселерометры, расположенные в модуле вторых шести акселерометров, имеют координаты в связанной системе координат, а ориентация их чувствительных осей задана в связанной системе координат как при этом выход модуля вторых шести акселерометров соединен со входами блока расчета базовых навигационных переменных и блока расчета ускорений в связанной системе координат, выход модуля первых шести акселерометров соединен со входом блока расчета базовых навигационных переменных, выход блока расчета базовых навигационных переменных соединен со входами блока расчета ускорений в связанной системе координат и блока расчета составляющих угловой скорости, а выход блока расчета составляющих угловой скорости соединен со входом блока расчета коэффициентов матрицы координатных преобразований.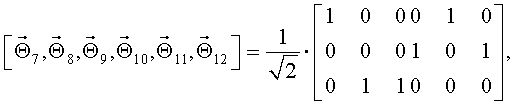

Формирователь импульсов напряжения с устройством защиты от отрицательных выбросов при подключении индуктивной нагрузки
Сборная панель
Высокочастотный усилитель с устройством стабилизации тока коллектора
Устройство для переработки состоящего из твердых углеродсодержащих материалов сырья
Энергоэффективные передатчик и приемник сигналов в проводной линии связи с устройством переключения режимов
Кмоп-фотоприемная ячейка с обработкой сигналов
Кмоп-фотоприемная ячейка
Широкополосный дифференциальный усилитель с устройством коррекции электротермической связи в биполярных транзисторах
Формирователь импульсов напряжения с устройством защиты от отрицательных выбросов при подключении индуктивной нагрузки
Сборная панель
Высокочастотный усилитель с устройством стабилизации тока коллектора
Устройство для переработки состоящего из твердых углеродсодержащих материалов сырья
Энергоэффективные передатчик и приемник сигналов в проводной линии связи с устройством переключения режимов
Широкополосный дифференциальный усилитель с устройством коррекции электротермической связи в биполярных транзисторах
Состав для получения теплозащитного покрытия

