Результат интеллектуальной деятельности: СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемая группа технических решений относится к ракетной технике и может быть использована в комплексах управляемого вооружения преимущественно воздушного базирования для борьбы с особо опасными целями, например, средствами ПВО, самолетами и вертолетами, пусковыми установками и батареями атомной артиллерии.
В настоящее время зарубежные армии оснащаются вооружением нового поколения, характеризующимся повышенной дальностью огневого действия и высокой живучестью. Все более широкое применение для борьбы с танками, самолетами, вертолетами и средствами ПВО находят комплексы управляемого вооружения с лучевой системой наведения. Известны отечественные комплексы "Бастион", "Рефлекс" (Оружие и технологии России, Бронетанковое вооружение и техника, том VII, М., 2003 г., Издательский дом "Оружие и технологии", с.341-345), и зарубежные "Mapats" (Израиль), MSS 1.2 (Бразилия), ZT-35 Ingwe (ЮАР), "Red Arrow" (Китай) (Высокоточное оружие зарубежных стран. Том 1, Противотанковые ракетные комплексы, обзорно-аналитический справочник, Тула, 2008 г.). Комплексы такого типа обеспечивают стрельбу на дальности до 5 км с вероятностью поражения около 0.8.
Условия скоротечности боя и высокая дальность огневого противодействия средств противника, например, наиболее распространенных средств ПВО до 5-6 км, требуют применения комплексов управляемого вооружения, размещенных на мобильных носителях с малым временем нанесения удара, повышенными дальностью эффективной стрельбы и вероятностью поражения цели. Эта задача отчасти решается применением комплексов воздушного базирования.
Однако вследствие высоких скоростей угловых перемещений линии прицеливания в процессе наведения ракет на цель такие комплексы характеризуются большой динамической ошибкой наведения и, как следствие, невысокой эффективностью поражения, не превышающей эффективность средств ПВО 0.3-0.6.
Существенное повышение эффективности поражения может быть получено посредством одновременного наведения нескольких ракет по одной цели (залпового огня).
Вероятность поражения цели W1 в этом случае определяется выражением (Вентцель Е.С., Теория вероятностей, Наука, М., 1964 г.)

где i - число ракет в залпе,
W1 - вероятность поражения цели одной ракетой.
Из (1) очевидно, что с ростом числа ракет возрастает вероятность поражения цели.
Наведение нескольких ракет по одной цели возможно как с нескольких самостоятельных комплексов, так и с одного комплекса в общем луче управления.
Известен способ наведения ракет по лучу, представленный в патенте РФ 2247299 МПК7 F41G 7/26, основанный на встреливании двух ракет в луч управления и телеориентировании ракет в одном луче управления с удержанием их в центре луча управления до поражения цели.
Сущность способа заключается в следующем. Каждую ракету пускают в направлении цели и удерживают в луче управления около его центра, съюстированного с линией прицеливания. Пуск их производят последовательно с некоторым временным интервалом, в результате чего ракеты оказываются разнесенными между собой по дальности, а ширину луча управления поддерживают постоянной по дальности в месте пролета последней ракеты.
Известен способ наведения по информационному лучу, осуществленный в системе наведения, защищенной патентом РФ №2382315 МПК F41G 7/26, позволяющий вести как одновременную стрельбу с нескольких комплексов по одной цели, так и стрельбу двумя ракетами с одного комплекса в одном луче по одной цели. Известный способ наведения осуществляют следующим образом.
На пункте управления в направлении цели посылают поочередно два плоских сканируемых луча. При этом луч, диаграмма которого вытянута по вертикали, сканируют по курсу, а луч с диаграммой, вытянутой по горизонтали, сканируют по тангажу. Оптическая панкратическая система в процессе наведения ракеты постоянно изменяет угловой размер растра сканирования лучей, поддерживая тем самым постоянство ширины поля сканирования лучей в месте пролета ракеты по дальности. Центр поля сканирования съюстирован с линией прицеливания. В системе используется время-импульсная модуляция лучей с литерным кодированием. Вертикально вытянутый луч модулируется кодовой последовательностью импульсов, в которой заложена информация о литерности и его отклонении от линии прицеливания по курсу, а горизонтально вытянутый луч модулируется кодовой последовательностью, содержащей информацию о литерности и его отклонении по тангажу. Литерный интервал - интервал между литерным и опорным импульсами - свой для каждого отдельного комплекса, устанавливается до пуска ракеты одинаковым для аппаратур пункта управления и ракеты. В короткие интервалы облучения сканируемыми лучами установленного на ракете приемника оптического излучения бортовая аппаратура осуществляет декодирование принимаемой кодовой последовательности на своей литерности, в результате чего на ракете вырабатываются сигналы управления ракетой, пропорциональные ее координатам в поле сканирования лучей. Способ отличается повышенной устойчивостью к оптическим помехам благодаря применению временного стробирования принимаемого сигнала и литерному кодированию информации о координатах ракеты, передаваемой с пункта управления на ракету по сканируемым лучам, что обеспечивает устойчивое управление ракетами при одновременной стрельбе несколькими по-разному кодированными комплексами по одной цели. При стрельбе залпом из-за одновременного использования нескольких самостоятельных комплексов для стрельбы по одной цели этот способ требует существенно больше материальных и людских затрат по сравнению с затратами при стрельбе залпом с одного комплекса.
Способ наведения обеспечивает квазизалповую стрельбу, при которой ракеты выпускаются одна за другой с небольшим временным промежутком. Для случая стрельбы двумя ракетами в одном луче по одной цели с некоторым временным промежутком между пусками ракет велика вероятность столкновения ракет. Вследствие этого вероятность поражения цели может быть даже меньше, чем для случая стрельбы одной ракетой.
Интервал времени между пусками ракет должен быть больше некоторого минимального значения во избежание столкновения ракет в полете в случае, если скорость второй ракеты окажется больше скорости первой, и меньше некоторого максимального значения, при котором для первой ракеты, летящей в расширенном луче, прекращается нормальное выделение координат ее приемником излучения.
Увеличение интервала между пусками следующих друг за другом ракет приводит к увеличению времени осуществления залпового удара, к необходимости удержания марки прицела на цели в течение большего времени, не позволяя носителю совершать маневр, снижающий эффективность огневого противодействия противника, а следовательно, к снижению выживаемости комплекса, к снижению боевой скорострельности и, в конечном счете, к снижению боевой эффективности носителя. Недостатками такого способа наведения является то, что первая ракета, летящая в более широком луче, использует меньшую энергетику луча, что может привести к потере ракеты, а также высокий уровень вероятности столкновения ракет на траектории полета и, как следствие, низкая эффективность поражения цели.
Описанный способ осуществлен в системе наведения, приведенной в патенте РФ №2382315 МПК F41G 7/26, содержащей установленные в аппаратуре пункта управления первый и второй импульсные источники излучения, блок формирования двух плоских ортогональных лучей, установленный между источниками излучения и блоком сканирования, кинематически связанным с датчиком углового положения, и соединенную с выходом блока сканирования оптическую панкратическую систему, съюстированную с оптическим прицелом, последовательно соединенные блок литерности и формирователь импульсного кода, а также первый синхронизатор, выход которого соединен с синхронизирующими входами блока литерности и формирователя импульсного кода, первый и второй выходы которого соединены со входами соответственно первого и второго источников импульсного излучения, а также расположенные в аппаратуре ракеты последовательно соединенные приемник излучения, оптически связанный с выходом оптической панкратической системы, блок стробирования сигнала и анализатор импульсного кода, последовательно соединенные второй синхронизатор и блок стробирующих импульсов, выход которого соединен со вторым входом блока стробирования сигнала, при этом выход приемника излучения соединен со вторым входом блока стробирующих импульсов, выход второго синхронизатора соединен с синхронизирующим входом анализатора импульсного кода.
Задачей предлагаемых технических решений является повышение эффективности поражения цели при стрельбе залпом управляемыми ракетами в одном луче. Поставленная задача достигается путем снижения вероятности столкновения ракет в полете за счет их удаления друг от друга в поперечном сечении луча управления.
По первому варианту предлагается способ одновременного наведения телеориентируемых в луче ракет, включающий формирование луча управления, совмещение его оптической оси с линией визирования цели, сужение луча управления с обеспечением постоянства его диаметра на дальности полета ракет, формирование сигналов, пропорциональных отклонению ракет от оптической оси луча управления, формирование команд управления ракетами, новым является то, что на каждой ракете формируют и запоминают сигнал, пропорциональный ее порядковому номеру, и формируют сигналы разнесения, определяемые по зависимостям
где yn, zn - сигналы разнесения соответственно в каналах тангажа и курса,
n - порядковый номер ракеты,
i - количество одновременно наводимых ракет,
h - диаметр окружности, на которой расположены центры ориентирования ракет в полете, причем количество одновременно наводимых ракет определяется из условия
где А - диаметр луча управления на дальности полета ракет,
σn - значение среднеквадратического отклонения координат ракет от ожидаемого положения, определенное, например, статистическим моделированием, h выбирают из условия
а формирование команд управления ракетами производят пропорционально разности между сигналами отклонения ракеты от оптической оси луча управления и сигналами разнесения в соответствующем канале управления.
По второму варианту предлагается способ одновременного наведения телеориентируемых в луче ракет, включающий формирование луча управления, совмещение его оптической оси с линией визирования цели, сужение луча управления с обеспечением постоянства его диаметра на дальности полета ракет, формирование сигналов, пропорциональных отклонению ракет от оптической оси луча управления, формирование команд управления ракетами, новым является то, что вначале измеряют дальность до цели, прогнозируют время полета ракеты до цели, на каждой ракете формируют и запоминают сигнал, пропорциональный ее порядковому номеру, формируют сигнал разнесения, определяемый по зависимостям
где yn, zn - сигналы разнесения соответственно в каналах тангажа и курса,
n - порядковый номер ракеты,
i - количество одновременно наводимых ракет,
h - диаметр окружности, на которой расположены центры ориентирования ракет в полете, причем количество одновременно наводимых ракет определяется из условия
где А - диаметр луча управления на дальности полета ракет,
σn - значение среднеквадратического отклонения координат ракет от ожидаемого положения,
h выбирают из условия
а формирование команд управления ракетами производят пропорционально разности между сигналами отклонения ракеты от оптической оси луча управления и сигналами разнесения в соответствующем канале управления, при этом на конечном участке наведения в момент, определяемый разностью прогнозируемого значения времени полета ракет до цели и времени переходного процесса контура управления ракетой, уменьшают сигналы разнесения по абсолютной величине до значения, соответствующего остаточному взаимному удалению ракет не менее максимальных габаритов ракеты в плоскости, перпендикулярной ее продольной оси.
На пункте управления производят обнаружение цели, формируют и посылают в направлении цели луч управления, в который встреливают телеориентируемые ракеты после их пуска. По площади поперечного сечения луч управления кодируют пропорционально угловым отклонениям (координатам) от его центра по курсу и тангажу, тем самым формируют в луче координатное поле управления ракетами, причем центр луча управления (начало координат поля управления) совмещают с линией визирования цели. Ракеты удерживают в луче до поражения цели путем приема излучения на ракете, выделения координат каждой ракеты относительно центра луча управления посредством декодирования сигнала управления и выработки на ней управляющего воздействия, пропорционально координатам ракеты для коррекции ее положения. Для снижения вероятности столкновения ракет в полете их наведение осуществляют с удалением друг от друга, что обеспечивают следующим образом. Перед пуском ракет в площади поперечного сечения луча управления для каждой из них выбирают положение (центр ориентирования), удаленное от выбираемых положений других ракет. Формируют и передают на борт каждой ракеты дополнительные команды управления, закодированные значениями координат выбранного положения в луче управления той же ракеты, выделяют на борту каждой ракеты координаты ее выбранного положения посредством декодирования дополнительных команд управления и формируют на борту ракеты дополнительное управляющее воздействие, пропорциональное и обратное по знаку координатам ее выбранного положения. В этом случае суммарное управляющее воздействие на ракету становится равным нулю в ее выбранном положении, которое и стремится занять ракета в полете. Величину взаимного удаления Δ выбираемых положений ракет задают из условия

где σn - экспериментальное или расчетное значение среднеквадратического отклонения координат ракеты от ожидаемого положения. Ввиду того, что характеристики реального положения ракеты носят случайный характер, ракета не может постоянно удерживаться в поперечном сечении луча в том положении, которое для нее выбрали перед пуском, а колеблется около него. В связи с этим при любом удалении выбираемых положений остается некоторая вероятность столкновения ракет. Минимально допустимое значение (10 σn) взаимного удаления выбираемых положений ракет определено посредством статистического моделирования залповой стрельбы управляемыми телеориентируемыми ракетами.
В качестве критерия при этом выбран уровень вероятности столкновения ракет Р=0.02, принятый для авиационных неуправляемых ракет. Верхняя граница удаления Δ ограничена шириной А луча управления. Кроме того, для минимизации вероятности столкновения ракет в полете при одновременном обеспечении устойчивости их телеориентирования каждой ракете в поперечном сечении луча управления выделяют область управления шириной не менее 10 σn, а выбираемые положения (центры ориентирования) ракет в полете располагают равномерно по окружности с центром, совпадающим с центром луча управления и диаметром h, определяемым условием (4), где i - количество одновременно наводимых в луче ракет, выбираемое из условия (3).
Для увеличения эффективности поражения крупногабаритных воздушных слабобронированных целей, а также скоплений живой силы противника путем увеличения площади поражения величину дополнительного управляющего воздействия поддерживают постоянной в течение всего времени полета ракет, сохраняя тем самым взаимное удаление ракет до поражения цели.
Во втором варианте при стрельбе по бронированной технике с целью повышения эффективности поражения путем концентрации мощности удара на конечном участке полета ракеты сводят к центру луча управления. Для этого вначале измеряют дальность Dц до цели, прогнозируют время tц полета ракет до цели, а на конечном участке наведения в момент t0, определяемый разностью прогнозируемого момента времени полета ракет до цели и времени переходного процесса контура управления ракеты

смещают центры ориентирования ракет из первоначально выбранных положений к центру луча управления, для чего уменьшают сигналы разнесения по абсолютной величине до значения, при котором остаточное взаимное удаление Δост ожидаемых средних положений ракет (центров ориентирования) отвечает условию:

где В - максимальные габариты ракеты в плоскости, перпендикулярной ее продольной оси.
Предлагаемые способы наведения реализуют в системе одновременного наведения телеориентируемых в луче управления ракет, содержащей установленные на пункте управления формирователь импульсного кода, два импульсных источника излучения и последовательно соединенные блок формирования двух плоских ортогональных лучей, блок сканирования, кинематически связанный с датчиком углового положения, выход которого соединен с первым входом формирователя импульсного кода, и съюстированную с оптическим прицелом оптическую панкратическую систему, а также блок литерности, подключенный своим выходом ко второму входу формирователя импульсного кода, и первый синхронизатор, выход которого соединен с синхронизирующими входами блока литерности и формирователя импульсного кода, причем первый и второй импульсные источники своими выходами подключены соответственно к первому и второму входам блока формирования лучей, и установленные на каждой ракете последовательно соединенные приемник излучения, оптически связанный с оптической панкратической системой пункта управления, блок стробирования сигнала и анализатор импульсного кода, а также блок стробирующих импульсов, подключенный первым входом к выходу приемника излучения, и второй синхронизатор, выход которого соединен с синхронизирующими входами анализатора импульсного кода и блока стробирующих импульсов, выход которого соединен со вторым входом блока стробирования сигнала, отличающаяся тем, что на пункте управления введены коммутатор, подключенный первым и вторым входами соответственно к первому и второму выходам формирователя импульсного кода, а первым и вторым выходами ко входам соответственно первого и второго источников импульсного излучения, последовательно соединенные дальномер, блок определения момента подачи команды сведения ракет, блок сравнения, формирователь строба и коммутатор режимов наведения, подключенный своим выходом к управляющему входу коммутатора, а также секундомер, подключенный ко второму входу блока сравнения, и распределитель признаков ракет, а на каждой ракете введены последовательно соединенные блок хранения признака, первый сумматор, первый блок произведения, синусно-косинусный функциональный преобразователь, второй блок произведения, первый инвертор, первый аттенюатор и второй сумматор, последовательно соединенные третий блок произведения, второй инвертор, второй аттенюатор и третий сумматор, а также блок хранения констант, при этом каждый выход распределителя признаков ракет соединен со входом блока хранения признака соответствующей ракеты, первый и второй выходы блока хранения констант соединены со вторыми входами первого сумматора и первого блока произведения соответственно, а третий выход блока хранения констант соединен со вторыми входами второго и третьего блоков произведения, второй выход синусно-косинусного функционального преобразователя соединен с первым входом третьего блока произведения, первый и второй выходы анализатора импульсного кода по тангажу и курсу соединены со вторыми входами второго и третьего сумматоров соответственно, а также последовательно соединенные селектор кода команды сведения ракет, подключенный своим входом к выходу приемника излучения, и запоминающий элемент, подключенный своим выходом к управляющим входам первого и второго аттенюаторов.
На фиг.1 изображена функциональная схема системы наведения для залповой стрельбы телеориентируемыми ракетами.
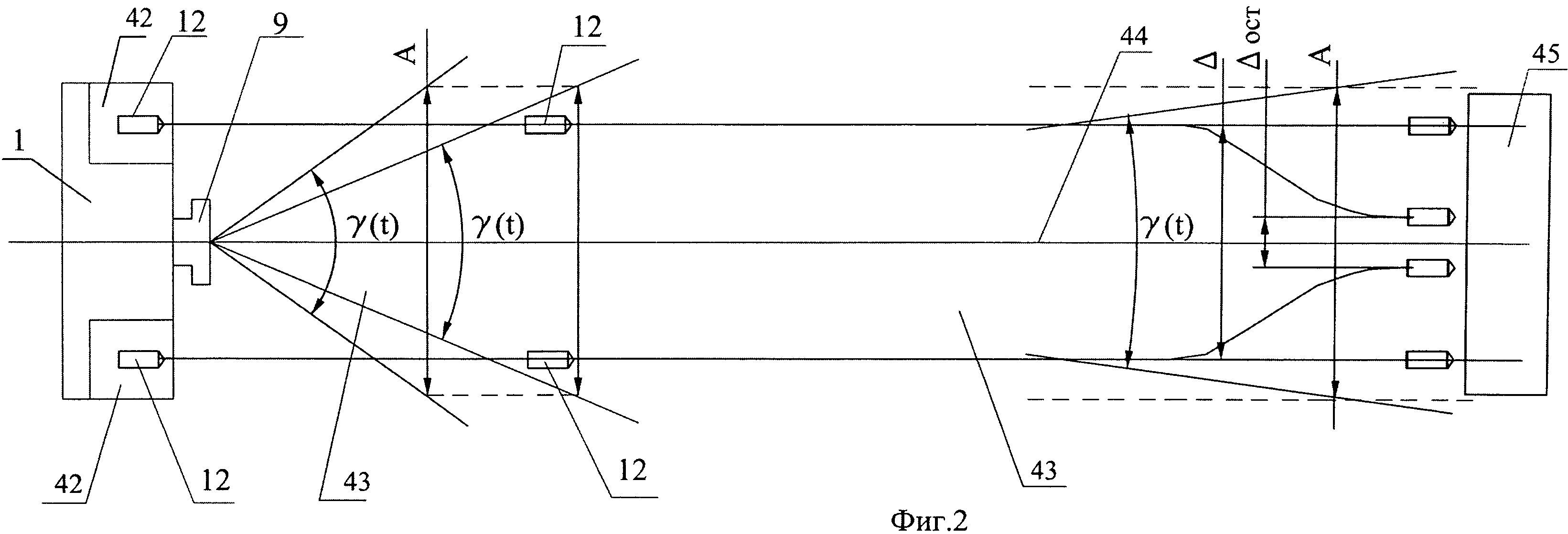
На фиг.2 представлена схема наведения при стрельбе залпом двумя ракетами с удалением ракет друг от друга по сечению луча управления.
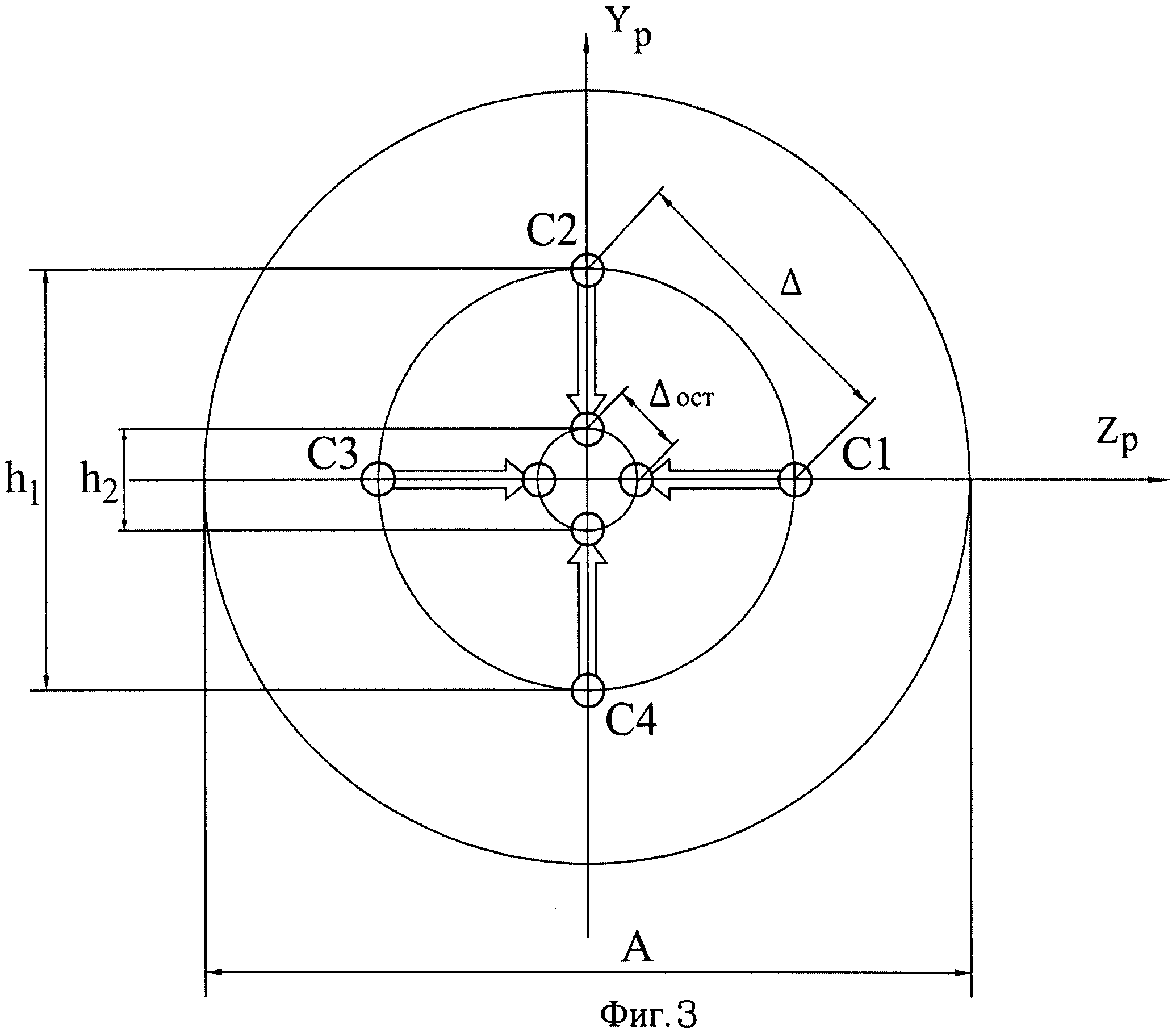
На фиг.3 показано расположение ракет в поперечном сечении луча при проведении залпа четырьмя ракетами.
На фиг.1 представлена блок-схема предлагаемой системы наведения, реализующей предлагаемый способ. В состав системы наведения на пункте управления 1 наряду с известными блоками, такими как: формирователь импульсного кода 2, первый и второй импульсные источники излучения 3,4, блок формирования двух плоских ортогональных лучей 5, первый синхронизатор 6, блок сканирования 7, датчик углового положения лучей 8, оптическая панкратическая система 9, оптический прицел 10 и блок литерности 11, входят новые блоки: коммутатор 18, секундомер 19, дальномер 20, кодообразователь команды сведения ракет 21, коммутатор режимов наведения 22, формирователь строба 23, блок сравнения 24, блок определения момента подачи команды сведения ракет 25 и распределитель признаков ракет 18, а на каждой ракете 12 к известным блокам: приемнику излучения 13, блоку стробирования сигнала 14, блоку стробирующих импульсов 15, второму синхронизатору 16 и анализатору импульсного кода 17 добавлены новые блоки: блок хранения признака ракеты 27, первый, второй и третий сумматоры 28, 40, 41, блок хранения констант 29, первый, второй и третий блоки произведения 30, 33, 34, синусно-косинусный функциональный преобразователь 32, первый и второй инверторы 35, 36, селектор кода команды сведения ракет 31, запоминающий элемент 37, первый и второй аттенюаторы 38, 39.
Предлагаемая система наведения работает следующим образом. На пункте управления 1 с ракетами 12 на пусковых установках 42 (фиг.2) производят обнаружение цели 45, в направлении которой посылают два плоских сканируемых луча. Световой поток от первого импульсного источника излучения 3 блоком формирования плоских ортогональных лучей 5 концентрируется в узкий пучок, вытянутый в вертикальном направлении, а световой поток от второго импульсного источника излучения 4 блоком формирования концентрируется в узкий пучок, вытянутый в горизонтальном направлении. Суммарный крестообразный пучок с блока 5 направляется на блок сканирования 7, выполненный в виде оптического клина, приводимого во вращательное движение электроприводом. Блок сканирования осуществляет последовательное качание лучей. При этом луч, диаграмма излучения которого вытянута по вертикали, сканирует по курсу, а луч с диаграммой, вытянутой по горизонтали, сканирует по тангажу. Вертикальный луч в процессе сканирования по курсу модулируют кодовой последовательностью, в которой заложена информация о литерности и его положении относительно линии прицеливания, аналогично луч, сканируемый по тангажу, модулируют кодовой последовательностью, содержащей информацию о литерности и его пространственном положении. Синхронно с блоком сканирования 7 вращается датчик углового положения лучей 8, на выходе которого вырабатываются сигналы о пространственном положении луча относительно среднего значения, совпадающего с линией прицеливания. Световой сигнал с блока сканирования поступает на оптическую панкратическую систему 9, которая непрерывно в процессе полета ракеты производит изменение масштаба изображения сканируемых лучей, обеспечивая тем самым постоянное координатное поле управления ракетой на траектории. Жестко с объективом панкратической системы 9 связан оптический прицел 10, прицельная марка которого совпадает с центром поля управления ракетой.
Электрические сигналы о положении каждого сканируемого луча в поле управления с датчика 8 подаются на первый вход формирователя импульсного кода 2, на второй вход которого поступают сигналы с блока литерности 11. Первый синхронизатор 6 вырабатывает тактовые импульсы, поступающие на синхронизирующие входы формирователя кода 2 и блока литерности 11.
Формирователь импульсного кода 2 непрерывно вырабатывает кодовые последовательности, в которых заложена информация о литерности и положении сканируемых лучей по курсу и тангажу (информация о координатах ракеты при ее облучении).
Блок литерности 11 вырабатывает опорный и литерный импульсы, и литерный интервал между этими импульсами, определяющий литерное кодирование передаваемой по лучам информации. Этот интервал устанавливается до пуска ракеты одинаковым для наземной и бортовой аппаратур каждого отдельного комплекса ПТУРС.
Цифровой сигнал с датчика углового положения о пространственном положении луча в формирователе кода 2 преобразуется во временной интервал между литерными и координатными импульсами в каналах курса и тангажа.
Импульсный код канала курса с формирователя 2 подается на источник излучения 3, а канала тангажа - на источник излучения 4. Источники излучения под действием управляющих сигналов с формирователя импульсного кода 2 вырабатывают короткие световые импульсы. Бортовая аппаратура ракеты осуществляет прием оптического сигнала и преобразует его приемником излучения в электрический сигнал. Прием сигнала происходит только в моменты пересечения сканируемыми лучами приемника 13.
Сигнал с приемника излучения ракеты 13 поступает на первый вход блока стробирования сигнала 14, на второй вход которого поступает сигнал с блока стробирующих импульсов 15. Блок стробирования сигнала 14 пропускает сигналы с приемника только в моменты присутствия стробирующих импульсов. Блок стробирующих импульсов 15 запускается от второго синхронизатора 16 в момент прихода опорного импульса с приемника 13. Для обеспечения синхронности выработки временного интервала литерности и положения временных шкал на ракете и пункте управления оба синхронизатора 6 и 16 выполнены идентичными. Благодаря применению временного стробирования принимаемого сигнала и работы бортовой аппаратуры на прием только в моменты облучения литерным импульсным кодом достигается повышение помехоустойчивости системы управления от оптических помех.
Сигнал с блока стробирования 14 поступает на вход анализатора импульсного кода 17, который производит преобразование кодовых сигналов в аналоговые, измеряя интервалы времени, соответствующие координатам ракеты по курсу Z и тангажу Y, и вырабатывает команды управления, пропорциональные отклонениям ракеты (координатам) по курсу и тангажу от центра луча управления.
Для исключения столкновения и воздействия газовых струй соседних ракет на неуправляемом участке полета, например, от схода с пусковой установки до встреливания в луч управления пуски ракет производят, например, с разведенных по фронту или высоте пусковых установок (фиг 2).
После встреливания ракет 12 в луч 43 ширину А луча в месте нахождения ракет поддерживают, например, постоянной изменением с помощью оптической системы углового размера γ(t) луча, например, посредством панкратического объектива с переменным фокусным расстоянием. Излучение с пункта управления принимают на каждой ракете, преобразуют его в электрический сигнал и декодируют, в результате чего получают электрические сигналы, пропорциональные координатам текущего положения ракет относительно центра 44 луча управления 43. Затем вырабатывают управляющее воздействие, пропорциональное выделенным таким образом координатам, смещающее ракету к центру луча управления, в результате чего каждую ракету удерживают в луче управления. Для обеспечения взаимного удаления ракеты в плоскости поперечного сечения луч управления на каждой ракете формируют дополнительное управляющее воздействие.
На пункте управления формируют дополнительные команды управления (сигналы разнесения), закодированные значениями координат ее выбранного положения, передают их на борт, например, при подготовке ракеты к пуску через цепи подготовки и пуска ракеты и пункта управления, декодируют на каждой ракете, выделяя тем самым значения координат выбранного положения, и фиксируют в блоке хранения признака ракеты для сохранения в течение полета, а сигналы разнесения вырабатывают пропорционально зафиксированным значениям координат выбранного положения ракеты с обратным знаком. В результате сложения сформированных таким образом управляющих воздействий каждая ракета смещается к своему выбранному положению и удерживается около него.
Зафиксированный в блоке 27 каждой ракеты признак, например, в виде порядкового номера ракеты, поступает на вход первого сумматора 28, где с номером ракеты суммируется константа "-1", поступающая с первого выхода блока хранения констант (БХК) 29. Далее сигнал с выхода первого сумматора поступает на первый вход первого блока произведения 30, на второй вход которого поступает константа "2π/i" со второго выхода БХК. С выхода первого блока произведения сигнал идет на вход синусно-косинусного функционального преобразователя (СКФП) 32, с первого выхода которого сигнал поступает на первый вход второго блока произведения 33, а со второго выхода СКФП - на первый вход третьего блока произведения 34, на вторые входы второго и третьего блоков произведения приходит константа "h/2" с третьего выхода БХК. В итоге с выхода второго блока произведения идет сигнал, который через инвертор поступает на первый аттенюатор и далее на второй вход второго сумматора, где складывается с тангажным выходом анализатора импульсного кода, а с выхода третьего блока произведения сигнал, пропущенный через инвертор, поступает на второй аттенюатор и далее на второй вход третьего сумматора, где складывается с курсовым выходом анализатора импульсного кода. В результате сложения дополнительных команд с командами управления, поступающими с блока 17, на выходах второго и третьего сумматоров 40 и 41 вырабатываются команды суммарного управляющего воздействия, смещающие ракету к ее выбранному положению.
Величину дополнительного управляющего воздействия (сигналов разнесения) сохраняют до поражения цели при стрельбе, например, по воздушным и крупногабаритным целям. Это позволяет сохранить при встрече с целью взаимное удаление ракет, и за счет этого обеспечить широкую площадь поражения.
На фиг.3 проиллюстрирован вариант размещения четырех ракет в поперечном сечении луча. Перед пуском ракет для каждой из них выбирают свое положение в площади поперечного сечения луча. Пусть, например, σн=0.02 А и выбираются положения ракет С1, С2, С3, С4 на окружности, например, диаметром 0.5 А с координатами
 ; n=1,2,3,4
; n=1,2,3,4
 ; n=1,2,3,4
; n=1,2,3,4
Минимальное значение Δmin составляет в этом случае

что отвечает условию (4):
При стрельбе по бронированной технике (во втором варианте) для обеспечения высокой концентрации мощности удара величину взаимного удаления ракет к моменту встречи с целью уменьшают. Для этого вначале, например, при сходе ракет с пусковой установки, измеряют дальность цели от пункта управления и прогнозируют время полета ракеты до цели, например, по экспериментальной или расчетной зависимости времени полета ракеты от заданной дальности полета, а при подлете к цели в момент t0, который определяется в соответствии с условием (5), на ракеты с пункта управления передают команду сведения ракет, по которой дополнительные управляющие воздействия, удерживающие ракеты около их выбранных положений, уменьшают по абсолютной величине, например, до значения соответствующего остаточному удалению Δост ракет (8), равному, например, максимальным габаритам ракеты В в плоскости, перпендикулярной ее продольной оси. Для приведенного выше случая с четырьмя ракетами в залпе новые ожидаемые положения ракет будут находиться на окружности диаметром h2
и иметь координаты
 ; n=1,2,3,4
; n=1,2,3,4
 ; n=1,2,3,4
; n=1,2,3,4
Изменение K величин дополнительных управляющих воздействий, пропорциональное изменению координат, составит

Источники импульсного излучения 3, 4, блок формирования лучей 5, формирователь импульсного кода 2, блок сканирования 7 с датчиком углового положения 8, оптическая панкратическая система 9 с оптическим прицелом 10, блок литерности 11, приемник излучения 13, блок стробирования сигнала 14, блок стробирующих импульсов 15, анализатор импульсного кода 17 и синхронизаторы 6, 16 являются элементами системы телеориентирования и могут быть выполнены, например, так же, как и в системе наведения - прототипе.
Дальномер 20, например, лазерный (см. патент РФ №2123165, МПК F41G 3/22) перед пуском ракет определяет дальность цели 45 от пункта управления, формирует и выдает на выход ее цифровое значение. Блок определения момента подачи команды сведения ракет 25 выполнен, например, в виде функционального преобразователя на постоянных запоминающих устройствах (ПЗУ), в ячейки которых занесена зависимость (5). По адресу, равному цифровому значению дальности цели - Дц, поступающему с дальномера 20 на адресный вход ПЗУ блока 25, осуществляется выборка соответствующего значения момента t0 подачи команды сведения ракет. Секундомер 19, представляющий собой, например, электронно-цифровой хронометрический прибор (см. В. А. Шполянский, Хронометрия, М., Машиностроение, 1974, с.241-255), запускаемый при пуске ракет, например, в момент их схода с пусковой установки производит счет реального времени полета ракет, значение которого поступает на блок сравнения 24, выполненный, например, в виде цифрового компаратора. На второй вход блока сравнения поступает значение времени t0 блока 25. Логическое состояние на выходе блока сравнения сменяется, например, с "0" на "1" в момент совпадения текущего времени со значением t0, в результате чего формирователь строба 23, выполненный, например, в виде одновибратора, вырабатывает стробирующий импульс на входе коммутатора режима наведения 22. Перед пуском ракет коммутатор 22, выполненный, например, в виде контактного устройства (см. Т.А.Рычина, Электрорадиоэлементы, М., Сов. Радио, 1976 г., с.19-20), устанавливают в одно из двух положений: 1 - например, при стрельбе по бронированной технике, 2 - соответственно при стрельбе по крупногабаритной и слабобронированной технике или по воздушным целям. При первом положении коммутатор 22 электрически связывает управляющий вход коммутатора 18 с выходом формирователя строба 23, при втором положении - например, с общей шиной. В первом случае стробирующий импульс с выхода блока 23 поступает на управляющий вход коммутатора команд 18, который производит отключение от входа блока излучателей сигналов, поступающих с формирователя импульсного кода команд управления 2, и подключение к ним сигнала с кодом команды сведения ракет с кодообразователя 21. При этом на время τстр действия стробирующего импульса луч управления по всему сечению независимо от угловых отклонений по курсу и тангажу модулируется одним кодом - кодом команды сведения ракет. Величину τстр выбирают, например, равной двум периодам обновления информации по координатам ракеты в луче, что обеспечивает прием каждой ракетой хотя бы одной кодовой последовательности сигнала команды сведения, вырабатываемой кодообразователем 21. Кодовая последовательность команды сведения представляет собой, например, группу из 3-5 импульсов с временными интервалами, отличными от интервалов, вырабатываемых формирователем импульсного кода 2. Кодообразователь 21 может быть выполнен, например, аналогично представленному в Справочнике по радиоэлектронике, под ред. А.А.Куликовского, М., Энергия, 1967, том 1, с.603, 604 [1].
Распределитель признаков ракет 26 и блок хранения констант 29 могут быть выполнены в виде постоянного запоминающего устройства (У.Титце, К.Шенк, Полупроводниковая схемотехника, М., Мир, 1982 г., с.125-127 [2]). Блок хранения признака ракеты 27 может быть выполнен, например, в виде оперативного запоминающего устройства, с.122-124 [2]. Сумматоры 28, 40, 41 могут быть реализованы, например, по схеме рис.11.1 (с.137). Блоки произведения 30, 33, 34 могут быть выполнены по схеме (рис.19.38, с.340 [2]). Синусно-косинусный функциональный преобразователь 32 может быть реализован на основе схем функционального преобразователя на ПЗУ (рис.19.39, с.341 [2]).
Дополнительные команды управления в каждом канале поступают на аттенюаторы 38, 39, коэффициенты передачи которых в исходном состоянии равны единице, а с выходов аттенюаторов - на соответствующие сумматоры 40, 41, выполненные, например, в виде схем суммирования на операционном усилителе.
В результате сложения дополнительных команд разнесения с командами управления, поступающими с блока 17, на выходах сумматоров 40 и 41 вырабатываются команды суммарного управляющего воздействия, смещающие ракету к ее выбранному положению.
При нахождении коммутатора 22 в положении I в промежутке времени от t0 до t0+τстр по лучу управления на каждую ракету поступает сигнал команды сведения, который декодируется селектором кода 31, выполненным, например, аналогично представленному в [1], с.604, 605, в результате чего на его выходе вырабатывается импульс команды сведения ракет, который поступает на запоминающий элемент 37, выполненный, например, в виде R-S триггера, и изменяет его состояние на выходе, например, с низкого уровня на высокий, воздействуя на управляющие входы аттенюаторов 38 и 39, выполненных в виде, например, управляемого делителя.
Этот сигнал вызывает уменьшение коэффициента передачи аттенюатора каждого канала, например, в соответствии с (8), в результате чего величины дополнительных команд по курсу и тангажу действующих на входе сумматоров 40 и 41 уменьшаются. Вследствие этого под действием нового суммарного управляющего воздействия каждая ракета смещается к новому положению вблизи центра луча управления, отстоящему от новых положений других ракет на величину Δост.
При нахождении коммутатора 22 в положении II при подлете к цели на ракеты не поступает сигнал команды сведения, в результате чего при встрече их с целью выбранное взаимное удаление сохраняется. Таким образом, обеспечивается эффективная стрельба как по крупно-габаритным слабобронированным и воздушным целям (первый вариант), так и по бронированным целям (второй вариант).
Вероятность поражения цели при стрельбе по предлагаемому способу наведения залпом двумя ракетами с учетом вероятности столкновения ракет на траектории Рст определяется формулой
 ,
,
а с учетом (1)
 .
.
При осуществлении залпа двумя ракетами с вероятностью поражения одной ракетой W1=0.7 и вероятностью столкновения ракет Рст=0.02 результирующая вероятность составит

что выше, чем вероятность поражения цели при стрельбе одной ракетой. Предлагаемый способ наведения для стрельбы залпом позволяет привести вероятности поражения каждой ракетой к уровню, соответствующему стрельбе одной ракетой, за счет снижения вероятности столкновения ракет, а при малом количестве ракет в залпе - исключению их столкновения на траектории. Предлагаемый способ снимает ограничения на максимальную дальность стрельбы и минимальный интервал между пусками ракет, имеющиеся у прототипа, что позволяет его использовать в комплексах, базируемых на высокомобильных носителях (самолетах и вертолетах) в условиях ведения огня по перспективной технике противника на дальностях, превышающих зону его огневого противодействия.
Способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой для его осуществления, способ выделения импульсов установки на ракете, вращающейся по углу крена, и устройство выделения импульсов установки для его осуществления, способ измерения угла крена на ракете
Способ формирования команды управления одноканальной вращающейся по углу крена ракетой и устройство для его осуществления (варианты)
Лазерная полуактивная головка самонаведения
Способ наведения ракеты, управляемой лучом радиолокационной станции, и устройство для его осуществления
Селектор импульсов
Способ стрельбы миной и комплекс минометного вооружения, реализующий его
Лазерная полуактивная головка самонаведения
Способ сопровождения объекта и способ формирования сигнала управления положением луча приемно-передающего антенного устройства системы сопровождения объекта
Способ преобразования аналоговых сигналов в импульсную последовательность, модулированную по времени, и устройство для его реализации
Агрегат с радиальным потоком
Способ формирования команд управления на ракете, вращающейся по углу крена, и система управления ракетой для его осуществления, способ выделения импульсов установки на ракете, вращающейся по углу крена, и устройство выделения импульсов установки для его осуществления, способ измерения угла крена на ракете
Способ формирования команды управления одноканальной вращающейся по углу крена ракетой и устройство для его осуществления (варианты)
Лазерная полуактивная головка самонаведения
Способ наведения ракеты, управляемой лучом радиолокационной станции, и устройство для его осуществления
Селектор импульсов
Способ стрельбы миной и комплекс минометного вооружения, реализующий его
Лазерная полуактивная головка самонаведения
Способ сопровождения объекта и способ формирования сигнала управления положением луча приемно-передающего антенного устройства системы сопровождения объекта
Способ преобразования аналоговых сигналов в импульсную последовательность, модулированную по времени, и устройство для его реализации
Агрегат с радиальным потоком

